| Министерство общего и профессионального образования
Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)
КУРСОВАЯ РАБОТА
По дисциплине: ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Тема: Синтез комбинированной САУ
Автор: студент группы ЭР-98-1863 Волчков Е.М. О
ценка: _______________
Дата: __________________
ПРОВЕРИЛ
Руководитель проекта доцент
___________ Стороженко С.В.
(должность) (подпись) (Ф.И.О.)
Санкт-Петербург
2002 год
Министерство общего и профессионального образования
Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)
УТВЕРЖДАЮ
Заведующий кафедрой
____________/______/
«____» ________2000 г
Кафедра автоматизации производственных процессов
КУРСОВАЯ РАБОТА
По дисциплине: ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ЗАДАНИЕ
Студенту группы ЭР-98 1863 Волчкову Е.M.
1. Тема проекта: синтез комбинированной САУ.
2. Исходные данные: экспериментальные данные переходных характеристик по возмущающему и управляющему каналам приведенным в таблице.
3. Содержание пояснительной записки: получение математической модели объекта, выбор и расчет параметров регулятора, построение переходных процессов определение показателей качества системы, расчет параметров НЦУ.
4. Перечень графического материала: структурная схема САУ, графики переходных характеристик, графический расчет параметров регулятора, график переходного процесса, структурная схема НЦУ.
5. Срок сдачи законченного проекта __________________
Руководитель проекта доцент
___________ Стороженко С.В.
(должность) (подпись) (Ф.И.О.)
Дата выдачи задания: _____________________
Оглавление
Аннотация………………..…………………….…………………………..…..………….4
Введение……………………….…………………………………………….…………….5
Задание…………………………………………………………………………………….6
1.Математическое описание объекта ……………………………………………...……7
2. Расчет оптимальных параметров регулятора комбинированной системы……...…7
3. Переходный процесс в АСР…………………………………………………………..10
4. Определение качественных показателей системы……………….………………….10
5. Переход к системе НЦУ…………………………..…………………………………..11
7. Библиографический список…………………………………………………………..13
Аннотация.
В работе рассматриваются вопросы, связанные с синтезом САУ с типовыми алгоритмами управления для технологических объектов, заданных экспериментальными переходными характеристиками. Выводятся параметры для применения полученных результатов в системах с непосредственным цифровым управлением (НЦУ).
Реклама

Annotation.
In activity the problems, bound with synthesis of systems of a computer-assisted management with standard control algorithms for technological objects, given experimental surge characteristics are esteemed. The parameters for application of the obtained result ins systems with direct numerical control (DNC) are injected.
Введение.
Промышленные объекты управления (ОУ), как правило, представляют собой сложные агрегаты со многими входными и выходными величинами, характеризующими технологический процесс. Зависимости выходных величин от входных, как правило, нелинейные, и изменение одной из них приводит к изменению других. Таким образом, создаётся сложная система взаимозависимостей, которую трудно, а подчас и невозможно строго математически описать.
Задачу можно существенно упростить, если считать зависимости выходных величин от входных линейными или линеаризуемыми в окрестностях малых отклонений от статических, рабочих режимов объекта. Поскольку при устойчивой работе автоматической системы регулирования (АСР) отклонения параметров в системе малы, такая линеаризация почти всегда оказывается допустимой. Кроме того, сложные объекты часто можно разбить на отдельные «регулируемые участки» («каналы»), взаимным влиянием отдельных каналов друг на друга можно пренебречь и рассматривать их как самостоятельные.
Характеристики объекта, необходимые для синтеза структуры и параметров АСР, могут быть найдены из математического описания объекта, получаемого аналитически, или определены экспериментально. Ввиду недостаточной изученности объектов и необходимости при их математическом описании принимать целый ряд существенных упрощений динамические и статические характеристики объектов, полученные экспериментально, часто оказываются более предпочтительными.
ЗАДАНИЕ
Выполнить синтез комбинированной САУ (рис.1) технологическим объектом, заданным экспериментальными переходными характеристиками, приведенными в табл.1.
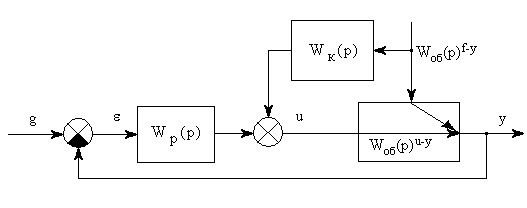
Рис.1
Таблица 1
| t,с
|
канал
f-y
|
канал
u-y
|
| 0
|
0
|
0
|
| 1
|
0,01
|
0
|
| 2
|
0,02
|
0,03
|
| 3
|
0,03
|
0,08
|
| 4
|
0,05
|
0,13
|
| 5
|
0,1
|
0,2
|
| 6
|
0,12
|
0,29
|
| 7
|
0,15
|
0,38
|
| 8
|
0,17
|
0,48
|
| 9
|
0,21
|
0,56
|
| 10
|
0,26
|
0,64
|
| 11
|
0,33
|
0,7
|
| 12
|
0,41
|
0,75
|
| 13
|
0,5
|
0,78
|
| 14
|
0,6
|
0,8
|
| 15
18
|
0,7
0,8
|
0,8
0,8
|
1.Математическое описание объекта
Реклама

Определение передаточной функции методом Лукаса [1].
Общий вид представлен формулой:
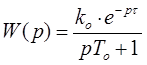 (1.1) (1.1)
По графику 1 определяем параметры передаточной функции :
Задающий канал :
Коэффициент усиления объекта: ко
= hуст
= 0,8
Время запаздывания: τо
= 3 с
Постоянная времени: То
= 8,5 с
Передаточная функция объекта по задающему каналу:
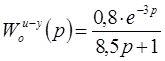 (1.2) (1.2)
.
2.
Расчет оптимальных парамеров регулятра комбинированной ситемы
За критерий качества АСР принимаем минимум интеграла от квадрата ошибки регулирования системы ε
(интегральный квадратичный критерий) с учетом добавочного ограничения на запас устойчивости системы, т.е.:
 (2.1) (2.1)
Такой критерий допускает значительное перерегулирование (γ»40%) и увеличивает время регулирования, но он обеспечивает наименьшее максимальное динамическое отклонение регулируемой величины.
При практических расчетах запас устойчивости удобно характеризовать показателем колебательности системы М.На практике чаще всего принимают М=1,6. При этом в САУ перерегулирование g £ 30%, максимальное отклонение регулируемого параметра при внутренних возмущениях (возмущениях по регулирующему воздействию) не превышает 10%.
Расчет параметров ПИ-регулятора по параметрам объекта по регулирующему каналу методом Роточа [3].
Расчет АФХ проводим на ПЭВМ с помощью программы «СС». Результаты расчета приведены в табл.2.1.
Данные для построения АФХ объекта по заданию. Таблица 2.1.
| Частота
|
Амплитуда
|
Фаза
|
| 0
|
0.8
|
0
|
| 0.03
|
0.77
|
-20
|
| 0.067
|
0.7
|
-40
|
| 0.1
|
0.56
|
-60
|
| 0.16
|
0.47
|
-80
|
| 0.19
|
0.4
|
-90
|
| 0.3
|
0.28
|
-120
|
| 0.4
|
0.22
|
-145
|
| 0.5
|
0.18
|
-160
|
| 0.6
|
0.15
|
-180
|
| 0.72
|
0.128
|
-202
|
| 0.87
|
0.1
|
-226
|
| 0.96
|
0.09
|
-239
|
| 1.1
|
0.08
|
-265
|
| 1.3
|
0.07
|
-278
|
Рассмотрим ПИ-алгоритм управления, передаточная функция которого имеет вид:
 (2.2) (2.2)
а параметрами, подлежащими определению, является коэффициент усиления кр
и постоянная интегрирования Ти
.
1). По АФХ объекта Wо
u-
y
(jω) строим семейство характеристик разомкнутой системы Wраз
(jω) для кр
= 1 и нескольких фиксированных значений постоянной интегрирования Ти
.
Для этого сначала строим несколько векторов характеристики объекта Wо
u-
y
(jω), например, векторы  для частоты ω1
, для частоты ω1
,  для ω2
и т.д. (рис.3). К их концам надо пристроить векторы для ω2
и т.д. (рис.3). К их концам надо пристроить векторы  , ,  ,…, ,…,  , повернутые по отношению к векторам , , повернутые по отношению к векторам ,  ,…, ,…,  на угол 90°. Длина векторов на угол 90°. Длина векторов  , ,  ,…, ,…,  выбирается из соотношения выбирается из соотношения  (где в числителе (где в числителе  - длина вектора АФХ объекта для определенного значения частоты wi
, которую можно измерить непосредственно в миллиметрах; в знаменателе – произведение указанной частоты на фиксированное значение Ти
). Через полученные точки С1
, С2
,…, Сn
проводим плавную кривую, которая является характеристикой Wраз1
(jω) для выбранного значения Ти
. - длина вектора АФХ объекта для определенного значения частоты wi
, которую можно измерить непосредственно в миллиметрах; в знаменателе – произведение указанной частоты на фиксированное значение Ти
). Через полученные точки С1
, С2
,…, Сn
проводим плавную кривую, которая является характеристикой Wраз1
(jω) для выбранного значения Ти
.
Аналогичные построения проводим для других значений Ти
. В итоге получаем семейство характеристик Wраз1
(jω) для различных значений Ти
.
2). Из начала координат проводим прямую ОЕ под углом b, характеризующим запас устойчивости по фазе и определяемым как
 (2.3) (2.3)
3). С помощью циркуля вычерчиваем окружности с центром на отрицательной вещественной полуоси, каждая из которых касается одновременно как прямой ОЕ, так и одной из характеристик Wраз1
(jω) (центр каждой окружности и ее радиус находим подбором).
4). Отношение требуемого радиуса R0
, определяемого по формуле :
 (2.4) (2.4)
Для вычисления кр. пред
использована формула
 (2.5) (2.5)
где R0
– радиус, определяемый по формуле (2.4); r – радиус окружности (на рис.3), который находим методом подбора; m к
– масштабный коэффициент, из рис.3 равный mк
= 0.01.
Все результаты вычислений представлены в таблице 2.2.
Таблица 2.2
| Ти,
с
|
ri
,мм
|
кi
|
| 9
|
32
|
3,18
|
| 6
|
35
|
2,91
|
| 4
|
49
|
2,08
|
5). В результате в плоскости варьируемых параметров алгоритма кр
и Ти
строится граница области заданного запаса устойчивости, вид которой представлен на рис.3
Максимум отношения кр
/Ти
, определяющее оптимальную настройку регулятора при низкочастотных возмущениях, соответствует точке пересечения касательной с границей заданного запаса устойчивости, проведенной через начало координат (точка А на рис.3).
Передаточная функция регулятора, после определения координат точки А (кр.опт
= 2,3 и Ти опт
= 5,4 с), имеет вид:
 (2.6) (2.6)
Следует отметить, что найденные таким образом параметры являются оптимальными только при низкочастотном характере возмущений. По мере расширения полосы частот возмущений точка оптимума в плоскости параметров (рис.3) смещается вправо от точки А, при чем сначала это смещение идет вдоль границы заданного запаса устойчивости, а затем, при достаточно высокочастотных воздействиях, она вглубь области. Это означает, что с ростом частоты воздействий ПИ-алгоритм должен все более приближаться к П-алгоритму, кр
которого также снижается. Это сопровождается ухудшением эффективности управления.
3. Переходный процесс в АСР
Для проверки правильности выполненных расчетов Wk
и Wp
рассчитаем переходные процессы в системе по заданию и возмущению. Для этого воспользуемся уравнением :
 (3.1) (3.1)
С помощью ЭВМ (программы «СС») частотным методом строим графики переходных процессов (рис. 4 ). Частотный метод основан на связи переходного процесса
 (3.2) (3.2)
По первой части уравнения (3.1) строим переходную характеристику по заданию, по второй – по возмущению.
4. Определение качественных показателей системы.
Данные для определения показателей качества находим из графика переходной характеристики на рис. 4 .
4.1. Для переходной характеристики по управляющему каналу.
1. Статическое отклонение: d=0.
2. Время регулирования: tp
=25,4 с
3. Перерегулирование:
 (4.3) (4.3)
4. Степень затухания:
 (4.4) (4.4)
5. Зона допустимых отклонений:
 (4.5) (4.5)
5.Переход к системе НЦУ
Система автоматического регулирования с НЦУ (рис.5) содержит объект управления и автоматический регулятор. Роль последнего выполняет ЭВМ, снабженная рядом устройств для преобразования сигналов из аналоговой формы в цифровую (АЦП), а также из цифровой формы в аналоговую (ЦАП). На рис.5 аналоговые сигналы обозначены как функции времени y(
t),
g(
t),
f(
t).
Соответствующие цифровые сигналы отличаются от них не только формой представления величин, но и дискретным характером изменения во времени. Изменение во времени цифровых сигналов производится в моменты времени t =
i
Тд.
, где Тд
– интервал дискретности; i
= 0,1,2,…
Канал
f(
t)
  компенсации компенсации
f(t)

g(t) g[n] U[n] U(t) jj y(t)

Главная отрицательная
  обратная связь обратная связь
Рис.5 Структурная схема системы НЦУ
Цифровые сигналы обозначены на схеме как переменные с индексами y[nТд,
], g[nТд
], f[nТд
]. Интервал дискретности Тд.
выбирается из условия Тд.
=
Тu
/20 где Тu
– постоянная времени интегрирования непрерывного регулятора.
Алгоритм работы ЭВМ, осуществляющий автоматическое регулирование, может быть получен из уже найденного закона регулирования непрерывного регулятора.
Передаточная функция регулятора: 
Определим интервал дискретности: Т0
= Ти опт
/ 20 = 5,4 / 20 = 0,27 с
Управляющее воздействие цифрового регулятора с компенсацией возмущения имеет вид:
U[n]=U1[n] (5.1)
ПИ-закон регулирования имеет вид:
 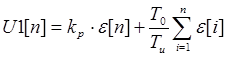 (5.2) (5.2)
Компенсирующее воздействие на предыдущем интервале дискретности:
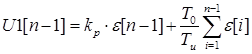 (5.3) (5.3)
Подставим числовые значения ПИ-регулятора и интервала дискретности:
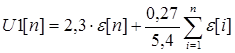 
Имеем:
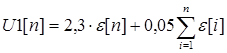 5.4) 5.4)
 (5.5) (5.5)
Вычтем из (5.4) - (5.5):

Окончательно U1[n] примет вид:
 (5.6) (5.6)
Учитывая, что ε[n]=g[n]-y[n] и ε[n-1]=g[n]-y[n-1], подставляем их в уравнение (5.6):
U1[n]=U1[n-1]+2,35× (g[n]-y[n])-2,3×( g[n]-y[n-1])
U1[n]=U1[n-1]+2,35×g[n]- 2,35×y[n]-2,3× g[n]+2,3×y[n-1]
U1[n]=U1[n-1]+0,05×g[n]- 2,35×y[n]+2,3×y[n-1] (5.7)
Полученное выражение используется для составление программы НЦУ.
Библиографический список.
1.Лукас В.А. Основы теории автоматического управления. Л.: Недра, 1977.376 с.
2.Медведев Р.Б., Бондарь Ю.Д., Романенко В.Д. АСУ в металлургии. М.: Металлургия, 1987. 253 с.
3. Ротач В.Я. Теория автоматического управления теплоэнергетическими процессами:Учебник для вузов.М.:Энергоатомиздат,1985.-386 с.
4.Марюта А.Н., Качан Ю.Г., Бунько В.А. Автоматическое управление технологическими процессами обогатительных фабрик. М.: Недра, 1983. 248 с.
5.ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ: Программа, методические указания, контрольные задания и задания к курсовой работе / Ленинградский горный институт. Сост.: В.И. Златкин, С.В. Стороженко. СПб, 1992. 40 с.
|