| Министерство образования Республики Беларусь
МОГИЛЕВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПРОДОВОЛЬСТВИЯ
КАФЕДРА «Прикладная механика»
КУРСОВОЙ ПРОЕКТ
По дисциплине «Теория механизмов и машин»
Тема проекта «Механизм насоса с качающейся кулисой»
Исполнитель: ст. гр. ХМУ-041
Полонец М.И.
Руководитель: ст. преподаватель
Горюнова Ф.К.
Могилев 2006
Министерство образования Республики Беларусь
МОГИЛЕВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПРОДОВОЛЬСТВИЯ
КАФЕДРА «Прикладная механика»
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К курсовому проекту по дисциплине «Теория механизмов и машин»
Тема проекта: «Механизм насоса с качающейся кулисой»
Исполнитель : ст. гр. ХМУ-041
Полонец М.И.
Руководитель: ст. преподаватель
Горюнова Ф.К.
Могилев 2006
Содержание:
Введение
1.
Динамический синтез рычажного механизма по коэффициенту неравномерности хода машины.
1.1. Исходные данные для проектирования……………..……………………с.6
1.2. Задачи синтеза рычажных механизмов………………..…………………с.7
1.3. Структурный анализ рычажного механизма………………..…………...с.9
1.4. Метрический синтез рычажного механизма…….…………………….…с.12
1.5. Построение 12 планов положения механизма…………………………...с.14
1.6. Построение 12 повернутых планов скоростей.………………………….с.15
1.7. Описание динамической модели машинного агрегата………………….с.17
1.8. Определение приведенных сил и моментов сопротивления……….……с.18
1.9. Построение графика  ………………………………..…………с.19 ………………………………..…………с.19
1.10. Построение графиков работы сил сопротивления  и работы движущих сил и работы движущих сил  ……………………………….……………..………………с.20 ……………………………….……………..………………с.20
1.11. Построение графика  ………………….………………………с.21 ………………….………………………с.21
1.12. Построение графика приращенной кинетической энергии  …с.22 …с.22
1.13. Определение приведенного момента инерции  ………………………..с.23 ………………………..с.23
1.14. Построение графика  ………………………………………….…с.25 ………………………………………….…с.25
1.15. Построение графика  кривой Виттенбауэра……………….…с.26 кривой Виттенбауэра……………….…с.26
1.16. Определение избыточной работы механизма и момента инерции маховика…………………………………………………………………………………..…с.28
1.17. Выбор положения максимальной нагрузки по графику  …….с.29 …….с.29
Введение
Механизм насоса с качающейся кулисой применяется в нефтедобывающей промышленности и предназначен для откачки жидкости с нефтяных скважин. Может применяться также для перекачивания жидкости.
Подача жидкости регулируется автоматически за счет кулачкового механизма 6.
Поршень 4 получает возвратно-поступательное движение в цилиндре от электродвигателя 8 через планетарный редуктор 9 и шарнирно-стержневой механизм О1
АО2
С.
Реклама

При движении поршня вверх осуществляется рабочий ход, а при движении поршня вниз – холостой.
При рабочем ходе на поршень 4 действует постоянная по величине сила полезного сопротивления.
Механизм с качающейся кулисой – одностороннего действия.
Кулачок 6 получает вращения посредством зубчатой передачи Z5
-Z6
.

Рис. 1. Кинематическая схема механизма
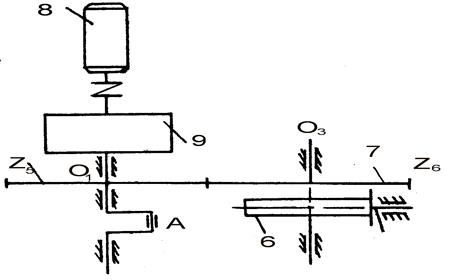
Рис.2.Схема привода станка.
 1. Динамический синтез рычажного механизма 1. Динамический синтез рычажного механизма
1.1. Исходные данные для проектирования.
Размеры звеньев:

Задачи динамического синтеза рычажных механизмов.
При динамическом синтезе рычажных механизмов стоят две задачи: метрический синтез недостающих размеров звеньев и вторая задача проектирование маховика, который необходимо установить на входном звене рычажного механизма с целью уменьшения колебаний угловой скорости входного звена.
Колебания угловой скорости вызывают динамическое давление в кинематических парах, могут вызвать упругие колебания звеньев, ухудшают условия протекания технологического процесса. Неравномерность хода машины и неравномерность движения главного вала оценивается коэффициентом неравномерности хода машины.
 с. 377 [1] с. 377 [1]
 - коэффициент неравномерности хода машины - коэффициент неравномерности хода машины
 - максимальная угловая скорость в цикле - максимальная угловая скорость в цикле
 - минимальная угловая скорость в цикле - минимальная угловая скорость в цикле
 - среднее значение угловой скорости - среднее значение угловой скорости
Колебания угловой скорости обуславливается двумя причинами:
а) несовпадение законов изменения приведенных движущих сил и сил сопротивления.
б) изменяемость приведенного момента.
Применением маховых колес решается задача регулирования непериодических колебаний угловых скоростей.
Подобранный маховик (колес) должен аккумулировать приращение кинетической энергии, когда работа движущих сил больше сил сопротивления (Адв
>Ас
) и отдавать кинетическую энергию при (Адв
<Ас
).

Рис. 1.2.1. Колебания угловой скорости.
По коэффициенту необходимо спроектировать маховик, который уменьшит колебания угловой скорости до некоторых допускаемых переделов. Маховик в рабочей машине устанавливается на одном валу с кривошипом. Когда работа движущих сил больше работы сил сопротивления маховик аккумулирует кинетическую энергию, а когда работа сил сопротивления больше работы движущих сил маховик отдает накопленную энергию.
1.3. Структурный анализ механизма.
Механизмом
называется такая кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья совершают однозначно определяемые движения.
Звено – одно тело или несколько тел жестко соединенных между собой.
Кинематическая пара – соединение 2-x звеньев допускающее их относительное движение.
Изобразим на схематически механизм и обозначим на схеме звенья и кинематические пары.
Реклама

Рис. 1.2.1. Схема механизма
Данный механизм является плоским. Плоскими называются кинематические цепи, точки звеньев которых описывают траектории в одной плоскости, или в параллельных плоскостях.
Так как механизм плоский, то число степеней свобод определяем по формуле Чебышева:
W=3n-2p5
-p4
с. 28 [1]
где n=5 – число подвижных звеньев;
p5
=7 – число одноподвижных звеньев;
p4
=0 – число двухподвижных звеньев;
w=3*5-2*7-1*0=1
Степень свободы равна единице, следовательно, механизм имеет одно входящее звено.
Строим заменяющую схему механизма, для чего:
- ползуны, кулисные камни заменяем рычагами
- поступательные пары заменим вращательными
- звенья, соединенные с тремя другими изобразим в виде треугольного контура.
Рис. 1.2.2. Заменяющая схема механизма
Разобьем механизм на структурные группы, запишем структурную формулу механизма и определим его класс и порядок:
I(0;1),II(2;3),II(4;5)=II2
(механизм 2 класса, 2 порядка)
Рассмотрим каждую структурную группу в отдельности, определив степень свободы для каждой из них:

1.4 Метрический синтез рычажного механизма.
Задачей
метрического синтеза является определение недостающих размеров звеньев. В данной работе за основное условие принимаем ход выходного звена. В качестве дополнительных условий:
а) условие существования кривошипа,
б) ограничение угла давления,
в) обеспечение заданной производительности механизма.
Недостающие размеры звеньев механизма определяем исходя из крайних (мертвых) положений механизма.

Рис. 1.4.1. Крайние положения механизма.
Кинематическое исследование рычажного механизма проводим для 12 положений. За нулевое положение принимаем крайнее положение, с которого начинается рабочий ход. Крайним
называется такое положение механизма, из которого входное звено может двигаться только в одном направлении.
По условию задачи задано: H=250мм, O2
O1
=525мм, K=2
Необходимо определить O2
C, O2
A, O1
A
1. Определим угол размаха кулисы
где k=2 по условию задачи.
2. Определим длину кривошипа.
O1
A1
= O2
O1
*0.5 =525*0.5=262.5 мм.
3. Определим О2
С
О2
С=H*0.5=125
4. Определим O2

Выберем масштабный коэффициент µS
=0,004м/мм,
1.5. Построение 12 планов положения механизма.
Построение ведется методом засечек. В первую очередь выстраиваем крайнее положение механизма. Затем кривошипную окружность делим на 12 равных частей и для каждого положения кривошипа вычерчиваем механизм в порядке подсоединения структурных групп методом засечек, причем все звенья механизма вычерчивают в порядке подсоединения структурной группы. За начало отсчета планом берется мертвое положение после которого начинается рабочий ход.
1.6. Построение 12 повернутых планов скоростей.
Планом скоростей
называется плоский пучок, лучи которого изображают абсолютные скорости точек звена, а отрезки соединяющие концы этих лучей изображают относительные скорости между отдельными точками звена.
Планом скоростей механизма
называется совокупность планов скоростей отдельных звеньев механизма с одним общим полюсом.
Построение планов скоростей начинаем с входного звена в порядке подсоединения структурных групп.
План скоростей необходим:
- для определения скоростей точек;
- для определения угловых скоростей точек;
- для использования в качестве рычагов Жуковского для определения приведенной силы сопротивления;
В связи с этим планы скоростей стоим повернутыми на 900
.

 - длина звена АО1
(действительная), м - длина звена АО1
(действительная), м
 - угловая скорость входного звена (кривошипа) - угловая скорость входного звена (кривошипа)
  - постоянная равная 3,14 - постоянная равная 3,14
 - частота вращения кривошипа, об/мин - частота вращения кривошипа, об/мин
 (рад/с) (рад/с)
VA
=8,06*0,262.=2,12 м/с;
Выбираем масштабный коэффициент:
Для определения других скоростей точек составляем системы уравнений:
υА3
=υА
+υА3А1
υА3
=υО2
+υА3О2
υС5
=υС3
+υС5С3
υС5
=υE
+υС5
E
Таблица 1.1. Скорости точек звеньев и угловые скорости звеньев
| скорости № положения
|
1
|
2
|
3
|
4
|
5
|
6
|
7'
|
8
|
9
|
10
|
11
|
12
|
| [Pva1], мм
|
53
|
| Va1 м/c
|
2.12
|
| [Pva3], мм
|
0
|
25.8
|
39.9
|
50.3
|
53
|
49.7
|
40
|
23.3
|
0
|
32.07
|
53
|
31.7
|
| Va3 м/c
|
0
|
1.03
|
1.6
|
2
|
2.12
|
1.98
|
1.6
|
0.93
|
0
|
1.28
|
2.12
|
1.3
|
| [Pvс3]мм
|
0
|
10.6
|
13.3
|
14.5
|
14.5
|
14.2
|
13.1
|
9.6
|
0
|
22.8
|
43
|
23.3
|
| Vс3 м/c
|
0
|
0.42
|
0.53
|
0.6
|
0.58
|
0.59
|
0.53
|
0.38
|
0
|
0.91
|
1.7
|
0.93
|
| [Pvс5]мм
|
0
|
15.1
|
13.9
|
14.7
|
14.5
|
14.4
|
13.8
|
9.6
|
0
|
24.53
|
43
|
26
|
| Vс5 м/c
|
0
|
0.6
|
0.55
|
0.59
|
0.580
|
0.57
|
0.52
|
0.38
|
0
|
0.98
|
1.7
|
1.04
|
| [Pva3a1]мм
|
0
|
52.6
|
35
|
18.5
|
0
|
18.3
|
34.9
|
47.6
|
0
|
42.57
|
0
|
42.3
|
| Va3a1 м/c
|
0
|
2.1
|
1.4
|
0.74
|
0
|
0.72
|
1.4
|
1.9
|
0
|
1.7
|
0
|
1.69
|
| [Pvc5c3]
|
0
|
7.6
|
6
|
2.5
|
0
|
2.4
|
4.4
|
4.6
|
0
|
9.5
|
0
|
10.3
|
| Vc5c3м/c
|
0
|
0.3
|
0.24
|
0.1
|
0
|
0.096
|
0.18
|
0.128
|
0
|
0.38
|
0
|
0.41
|
| [Pvs3']мм
|
0
|
17.3
|
22.5
|
25.6
|
7.26
|
8.1
|
22.7
|
15.6
|
0
|
38.4
|
77.3
|
38.4
|
| Vs3' м/c
|
0
|
0.69
|
0.9
|
1.02
|
0.29
|
0.325
|
0.9
|
0.63
|
0
|
1.5
|
3.2
|
1.54
|
| [Pvs3'']мм
|
0
|
0.55
|
7.8
|
8.1
|
26.5
|
25.6
|
7.2
|
5
|
0
|
12.125
|
44.7
|
12.2
|
| Vs3'' м/c
|
0
|
0.21
|
28.8
|
0.32
|
1.06
|
1.02
|
0.29
|
0.2
|
0
|
48.5
|
0.99
|
48.8
|
| [Pvd]мм
|
0
|
11
|
14.4
|
16.3
|
5.3
|
51.2
|
14.4
|
10
|
0
|
24.25
|
49.4
|
24.4
|
| Vdм/c
|
0
|
0.44
|
0.58
|
0.63
|
2.12
|
2.05
|
0.58
|
0.4
|
0
|
0.97
|
1.98
|
0.97
|
| [Pvb]мм
|
0
|
34.7
|
45
|
51.2
|
14.5
|
16.3
|
45
|
31.5
|
0
|
76.775
|
154.4
|
78.8
|
| Vb м/c
|
0
|
1.39
|
18
|
2.05
|
0.58
|
0.65
|
1.8
|
1.26
|
0
|
3.071
|
6.2
|
30.7
|
| W1, c-1
|
0.8
|
| W3, c-1
|
0
|
1.76
|
2.3
|
2.6
|
2.7
|
2.6
|
2.3
|
1.6
|
0
|
3.9
|
0.79
|
3.9
|
Метод подобия – фигура на плане скоростей звена образованная векторами относительной скоростей точек звена подобно и сходственно расположена с фигурой на звене образованной теми же точками.
Чтобы определить угловую скорость звена, необходимо относительную скорость между двумя точками звена разделить на расстояние между точками. Чтобы определить направление угловой скороси звена, необходимо вектор относительной скорости между любыми 2-мя точками звена перенести паралельно самому себе в точку звена, не являющегося полюсом, и повернуть звено в направлении вектора вокруг полюса.
1.7. Описание динамической модели машинного агрегата.
Определение приведенных сил и моментов сопротивления.
Под машинным агрегатом
понимается совокупность механизмов двигателя, передаточных механизмов и механизмов рабочей машины.
Для определения приведенной силы сопротивления необходимо весь машинный агрегат заменить динамической моделью:
Рис. 1.7.1. Схема привода машинного агрегата
Рис. 1.7.2. Динамическая модель
Приведенная сила (
Pn
c
)
– сила, условно приложенная к точке приведения, работа которой на нее элементарном перемещении равна сумме работ всех сил и пар сил, действующих на звенья механизма.
Приведенный момент инерции
– это есть момент инерции вращающегося тела вместе со звеном АО1
тела, кинетическая энергия которого в каждом рассматриваемом положении механизма равна сумме кинетических энергий всех его звеньев.
Приведенные моменты инерции  машинного агрегата могут быть или постоянными, или зависящими от положения начального звена. В данном случае (долбежный станок) инерции зависит от угла поворота j начального звена. машинного агрегата могут быть или постоянными, или зависящими от положения начального звена. В данном случае (долбежный станок) инерции зависит от угла поворота j начального звена.
В большинстве технических задач приведенный момент движущих сил и приведенный момент сил сопротивления задаются в виде графиков. В виде графика также задается и приведенный момент инерции. Поэтому решение уравнений движений механизма ведется графочисленными методами. При графочисленном решении уравнений движения удобно применить уравнение кинетической энергии. Для того использовать диаграмму  , устанавливающей связь между кинетической энергией Т и приведенным моментом инерции . , устанавливающей связь между кинетической энергией Т и приведенным моментом инерции .
1.8. Определение приведенной силы сопротивления  приведенного момента сопротивления приведенного момента сопротивления  . .
Для определения приведенной силы используют рычаг Костера т.е. на повернутом плане скоростей параллельно самим себе переносим все силы, действующие на звенья механизма.
Приведенная сила
– это сила, приложенная к кривошипу и ему перпендикулярна, причем работа приведенной силы, умноженная на ее элементарное перемещение равна сумме работ всех сил и пар сил, действующих на звенья.
Определение приведенной силы сопротивления  (пример для 5-го положения механизма). (пример для 5-го положения механизма).
 (1.8.1) (1.8.1)
где  - ускорение свободного падения. - ускорение свободного падения.
откуда находим 

 (1.8.2.) (1.8.2.)
где  - масштабный коэффициент механизма. - масштабный коэффициент механизма.

Аналогично определяются и для 11 других положений механизма:
Таблица 1.8.1. приведенные силы сопротивления и приведенные моменты сопротивления .
| № положения
|
hg3'
|
hg3''
|
Hg5
|
hp
|
G3'
|
G3''
|
G5
|
Q
|
P приведенная
|
М приведенный
|
| 0
|
0
|
0
|
0
|
212
|
77.1
|
242.9
|
240
|
3200
|
0
|
0,0
|
| 1
|
20
|
32
|
30,2
|
212
|
957,1642
|
245,8
|
| 2
|
28
|
20
|
27,8
|
212
|
895,5245
|
230,0
|
| 3
|
32
|
16
|
29,4
|
212
|
951,6755
|
244,4
|
| 4
|
0
|
28
|
29
|
212
|
898,1189
|
230,6
|
| 5
|
16
|
32
|
28,8
|
212
|
932,0075
|
239,3
|
| 6
|
28
|
28
|
27,6
|
212
|
886,3509
|
227,6
|
| 7
|
28
|
16
|
19,2
|
212
|
639,2585
|
164,2
|
| 8
|
0
|
0
|
0
|
212
|
0
|
0,0
|
| 9
|
60
|
44
|
49,06
|
212
|
2,796226
|
0,7
|
| 10
|
0
|
100
|
86
|
212
|
133,7264
|
34,3
|
| 11
|
60
|
44
|
52
|
212
|
6,124528
|
1,6
|
1.9. Определение приведенного момента инерции  . .
Приведенным моментом инерции
называется момент инерции вращающегося вместе со звеном тела, кинетическая энергия которого в каждом рассматриваемом положении механизма равна сумме кинетических энергий всех его звеньев и обозначается  . .

где  - кинетическая энергия машинного агрегата. - кинетическая энергия машинного агрегата.
 - угловая скорость кривошипа, - угловая скорость кривошипа,
где Тдв
– кинетическая энергия двигателя,
 -угловая скорость двигателя, -угловая скорость двигателя,
где 

Tм-ма
=Тдв
+Ткр
+Т3
+Т4
с. 335 [1]
Где Ткр
- кинетическая энергия кривошипа,
Т3
- кинетическая энергия 3-го звена,
Т4
- кинетическая энергия 4-го звена,
По условию задачи центр масс звена ВО2
Д задан пересечении медиан, для удобства решения применим другой метод, который заключается в разбиении звена ВО2
Д на два звена ВО2
и О2
Д центра масс с массами  и и  : :




Tм-ма
=Тдв
+Ткр
+Т3
+Т5

Аналогично определяются приведенные моменты инерции в о остальных 11 положениях. Данные заносим в таблицу:
Таблица 18.1. Приведенные моменты инерции
| 0
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
| 112
|
125,4
|
123,3
|
125,0
|
124
|
124,1
|
122,1
|
117,5
|
112,1
|
147,5
|
150
|
151,9
|
Выбираем масштабный коэффициент 
1.10 Построение графиков
Строим график зависимости 
масштабный коэффициент 
Интегрируем график
методом хорд, троим график работы сил сопротивления  и график работы движущих сил
и график работы движущих сил  .
Для интегрирования графика .
Для интегрирования графика  методом хорд выбираем полюсное расстояние и масштабный коэффициент работы:
методом хорд выбираем полюсное расстояние и масштабный коэффициент работы:

График работы движущих сил сопротивления представляет собой прямую, перпендикулярную, соединяющую начало и конец графика  . .
Строим график
Аналогично определяется  для 12 других положений механизмаТаблица для 12 других положений механизмаТаблица
Затем строим график приведенных моментов сопротивления 
Масштабный коэффициент 
Из графиков  и
и  методом общей переменной строим график -
кривая Виттенбауэра. методом общей переменной строим график -
кривая Виттенбауэра.
1.11.
Определение избыточной работы механизма и
момента инерции маховика.
с. 302 [3]
Проводим касательные под углами jМАХ
и jMIN
к кривой Виттенбауэра, и получаем отрезок KL. Отрезок KL представляет собой избыточную работу с тем же масштабным коэффициентом, что и кинетическая энергия.
Для определения избыточной работы необходимо:
1) построить кривую Виттенбауэра ,
2) к этой кривой под углами jМАХ
и jMIN
провести касательные, которые отсекут на оси Т отрезок KL,
3) 
 с. 385 [1] с. 385 [1]
где  = 20- избыточная работа, = 20- избыточная работа,
Для определения величины приведенного момента инерции маховика воспользуемся формулами: с.387/1/
 (1.11.1) (1.11.1)
 (1.11.2) (1.11.2)
Подставляя данные значения для  и и  в формулы (1.11.1) и (1.11.2), определяем углы jМАХ
и jMIN
.
Проводим, далее, одну касательную к кривой в формулы (1.11.1) и (1.11.2), определяем углы jМАХ
и jMIN
.
Проводим, далее, одну касательную к кривой  под углом jМАХ
, а другую – под углом jMIN
.
И определяем точку пересечения О1
этих касательных. Точка О1
является началом осей координат диаграммы под углом jМАХ
, а другую – под углом jMIN
.
И определяем точку пересечения О1
этих касательных. Точка О1
является началом осей координат диаграммы  полной кинетической энергии Т механизма в функции полного приведенного момента инерции . Следовательно, для определения полного приведенного момента инерции в каждом положении механизма необходимо отсчитать абсциссы от нового начала координат О полной кинетической энергии Т механизма в функции полного приведенного момента инерции . Следовательно, для определения полного приведенного момента инерции в каждом положении механизма необходимо отсчитать абсциссы от нового начала координат О
Результаты расчетов:




1.12 Определение положения максимальной нагрузки машинного
агрегата.
По графику
выбираем положение максимальной нагрузки
1.13 Определение углового ускорения
Угловое ускорение определим по формуле:
 c.137 [2] c.137 [2]

1.13. Проверка полученных результатов при помощи программы.
С помощью вычислительной программы (в а.706-II) были заложены следующие входные параметры:
Частота вращения кривошипа (об/мин):77
Коэффициент неравномерности хода:.. 0.1
Длина кривошипа (м)....………...……...0.262
Радиус обода маховика (м)......………... 0.161
--------------------------------------------------------------------------------
Моменты сил сопротивления: Моменты инерции:
1-й: 0 1-й: 112
2-й: 245.8 2-й: 125.4
3-й: 230 3-й: 123.3
4-й: 244.4 4-й: 125
5-й: 230.6 5-й: 124
6-й: 239.3 6-й: 124.1
7-й: 227.6 7-й: 122.1
8-й: 164.2 8-й: 117.5
9-й: 0 9-й: 112
10-й: 0.7 10-й: 147
11-й: 34.3 11-й: 150
12-й:1.6 12-й: 151.9
--------------------------------------------------------------------------------
Приведенный момент движущих сил=134.61
Избыточная работа=627.36
Момент инерции маховика=96.49
Масса маховика=0.01
Ускорение кривошипа в 12 положениях:
1-й: -2.682;
2-й: -0.726;
3-й: -0.589;
4-й: -0.255;
5-й: -0.121;
6-й: 1.728;
7-й: 3.818;
8-й: -11.409;
9-й: -7.635;
10-й: -1.410;
11-й; 13.151
Рассчитаем погрешности:
 (1.16.8.) (1.16.8.)
Х – величина для которой проводиться расчет.
 % %
 % %


1.16
Расчет коэффициента динамичности К.
K= с. 377 [1] с. 377 [1]
2. Динамический анализ рычажного механизма.
2.1 Задачи второго листа.
Силовой анализ механизмов основывается на решении первой задачи динамики – по заданному движению определить действующие силы. Поэтому законы движения начальных звеньев при силовом анализе считаются заданными. Внешние силы, приложенные к звеньям механизма, обычно тоже считаются заданными и, следовательно. подлежат определению только реакции в кинематических парах. Но в кинематических парах внешние силы иногда, приложенные к начальным звеньям, считают неизвестными. Тогда в силовой анализ входит определение таки значений этих сил, при которых выполняются принятые законы движения начальных звеньев.
При решении обеих задач динамики используют метод на основе уравнений равновесия твердых тел. Сущность этого метода сводиться к решению уравнения Даламбера, для этого силу инерции (противодействие ускоряемого тела) условно переносят на это тело (каждое звено и весь механизм) можно рассматривать как находящееся в равновесии перенесенная сила уравновешивается со всеми остальными внешними силами, в том числе и с реакциями, действующими на это тело.
Метод силового расчета механизма с использованием сил инерции и применение уравнений динамического равновесия иногда называют кинематическим расчетом механизмов, а сами уравнения кинематическими.
2.2. Построения плана ускорения рычажного механизма.
с. 38 [2]
На листе вычерчиваем схему механизма в положении близком МАХ нагрузки. К этому положению вычерчиваем план скоростей (не повернутый) и это положение соответствует четвёртому положению механизма. Методика построения скоростей описана ранее в пункте 1.5 первого листа.

Определяем масштабный коэффициент плана ускорений:

Ускорение точки В найдем через систему уравнений: Ускорение Кориолиса
равно удвоенному произведению угловой скорости кулисы на скорость относительного движения кулисного камня по кулисе.
Чтобы определить направление а
к
надо относительную скорость кулисного камня по кулисе повернуть на 900
в сторону вращения кулисы.
Кулисный механизм
– это механизм в котором звенья имеют относительное движение по другим подвижным звеньям. В кулисных механизмах принимаем относительное движение камня по кулисе, за переносное движение кулисы.

[a1
k
]=

[π
п
3
]=

Чтобы определить угловое ускорение звена, необходимо относительное касательное ускорение между двумя точками звена разделить на расстояние между этими точками. Чтобы определить направление углового ускорения звена, нажжено вектор относительного начального ускорение между двумя точками звена перенести параллельно самому себе в точку звена, не являющуюся полюсом, и повернуть звено в направлении вектора вокруг выбранного полюса.
 

[С п3
]=

[π
п
3
]=

[С3
k
2
]=
 = = 
2.3. Определение инерционной нагрузки звеньев.
с. 238 [1]
Характер инерционной нагрузки звена зависит от характера его движения.
Величины сил инерции определяться как произведение массы отдельных точек на их ускорение.
Направление этих сил противоположны направлениям рассматриваемых точек.
При поступательном прямолинейном движении звена, инерционная нагрузка состоит только из силы инерции:
Ф= -m ; ;
При вращательном движении звена вокруг оси, проходящей через ее центр масс, сила инерции Ф=0, т.к. as
=0;и если угловое ускорение этого звена не равно нулю, то силы инерции составят пару с моментом равным  Mи
= -Js
E. Mи
= -Js
E.
Момент сил инерции направлен противоположно угловому ускорению.
При вращательном движении звена вокруг оси на проходящей через центр масс и при плоскопараллельном движении, все силы инерции звена могу быть приведены к силам инерции Ф= -ms
, приложенной в центре масс звена и к паре сил инерции, момент которой равен Mи
= -Js
E.
Если инерционная нагрузка звена представлена в виде силы инерции A и момента сил инерции Ми
, то ее можно заменить одной силой Ф, направленной противоположно ускорению центра масс звена, но приложенной в центре качания.
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
2.4. Силовой анализ методом планов сил.
с. 249 [1]
Cиловой анализ выполняется в обратной последовательности структурной формулы.
Ι(0,1)→ΙΙ2
(2,3)→ΙΙ2
(4,5)→ΙΙ2
Приведенная сила
- сила, приложенная в точке кривошипа и ему перпендикулярная (чаще в конце кривошипа), работа, которой на ее элементарном перемещении равна сумме работ всех сил и пар сил, действующих на звенья механизма ни их элементарное перемещение.
Реактивная сила возникает тогда, когда невозможно перемещение в каком-либо направлении, реактивный момент – если невозможен поворот относительно какой-нибудь координатной оси.
Каждая сила и реакция характеризуется тремя параметрами: модуль, направление, точка приложения. Для определения неизвестных реакций, должно выполняться условие статической определимости кинематической цепи:
3n=2p5
+p4
В любом статически определимом плоском механизме силы можно определить уравнениями кинематики. При силовом анализе внутри структурной группы в первую очередь определяют реакции во внешних кинематических парах, а затем рассматривают внутренние. Если у диады внешние кинематические пары вращательные, то реакции в таких парах раскладывается на две составляющие: нормальную – направлена по звену; и касательную – перпендикулярно к звену.
В первую очередь определяют касательную составляющую реакции из уравнения суммы моментов всех сил относительно внутренней точки диады (для каждого звена в отдельности).
Нормальная составляющая реакции определяется из плана сил диады. Для определения реакций во внутренней точке кинематической пары, строят план сил для любого из звеньев диады.
При переходе от одной диады к другой, реакция на стыке диад (или диады и механизма I класса меняет направление на противоположное.
2.4.1. Диада 4-5
Запишем уравнение равновесия в векторной форме:

Реакцию R50
в точке Е определим из плана сил диады, также как и реакцию R54
Выберем масштабный коэффициент плана сил:


2.4.2. Звено 3 – кулиса.
Запишем уравнение равновесия в векторной форме:

Для определения реакции R32
составим уравнение суммы моментов относительно точки 02
:


[pr23
]=R23
/ =1885/20=94.5 мм. =1885/20=94.5 мм.
 . .
2.4.3. Силовой анализ кривошипа. Определение уравновешивающей силы и уравновешивающего момента.
с. 260 [1]
Под действием произвольно приложенной к начальному звену сил, в том числе и сил инерции, начальное звено в общем случае не находиться в равновесии, так как при числе подвижных звеньев, равном единице, и числе пар V класса, также равном единице, число уравнений равновесия, которое мы можем составить на единицу меньше числа неизвестных, подлежащих определению, т.к. 3n-2p5
=3-2=1. Чтобы было равновесие, необходимо дополнительно ввести силу или пару сил, уравновешивающую все силы и приложенная к начальному звену. Эта сила и момент называются уравновешивающей силой и уравновешивающим моментом соответственно.
Уравновешивающей силой и моментом являются реактивные силы или момент от той рабочей машины, которая приводится в движение рассматриваемым двигателем, т.к. коленчатый вал двигателя соединен с главным валом рабочей машины по средствам зубчатой передачи, то в качестве уравновешивающей силы, приложенной к зубчатому колесу, сидящему на валу двигателя, будем иметь реактивную силу рабочей машины. Т.о. величина действия уравновешивающей силы полностью определяется конструкцией передаточного механизма оси машины.
Запишем уравнение равновесия в векторной форме:

Для того чтобы найти уравновешивающую силу составим уравнение моментов относительно точки О1
.
 
Из плана сил определим реакцию в точке O1
:
R10
= =20*102.8=2056 Н. =20*102.8=2056 Н.
2.5. Силовой анализ методом Жуковского.
с. 236 [1]
Теорема Жуковского: если силу, приложенную в какой либо точке звена плоского механизма, перенести параллельно самой себе в одноименную точку повернутого на 90˚ плана скоростей, то момент этой силы относительно полюса плана скоростей будет пропорционален ее мощности.
Определение уравновешивающей силы методом Жуковского:
- Если при силовом анализе не требуется определения реакций кинематических пар, то уравновешивающую силу можно определить методом Жуковского. Для этого необходимо построить повернутый на 90 план скоростей.
- В соответствующие точки этого плана параллельно самим себе перенести все силы и силы от пар сил.
- Составить уравнение суммы моментов относительно полюса.
Предварительно найдем:
h
1
=134 мм
h
2
=17 мм
h
3
=60,51 мм
h
4
=73мм
h
5
=113,75 мм
h
6
=257 мм
 ; ;

 ; ;

Погрешность вычисления уравновешивающей силы между двумя способами:

 Н/м Н/м
2.6. Потери мощности на трение в кинематических парах.
c. 212-229 [1]
Трение представляет собой сложный комплекс механических, физических явлений, причем те или иные явления преобладают в зависимости от условий при которых происходит процесс трения.
Различают трение: сухое, жидкостное, полусухое и полужидкостное.
По виду относительного движения различают:
а) трение-скольжение – внешнее трение при относительном скольжении соприкасающихся тел.
б) трение качения – внешнее трение при относительном качении соприкасающихся тел.
В механизмах трение возникает только в кинематических парах. В поступательной паре, возникающая в точке контакта, сила трения направлена в противоположную сторону относительного смещения трущихся поверхностей.
Модуль силы трения определяют по формуле Fm=f*Rw
, Rw
- модуль результирующей силы.
Работа сил трения отрицательна.
Трение во вращательной паре: обычно во вращательной паре есть зазор, радиус цапфы меньше радуиса охватывающейся поверхности: fвр
’
=1.3fпост
.
Потери мощности на трение:
поступательная пара: 
вращательная пара:
 , ,
где Rвр
- реакция вращательной пары;
f=0.15- коэффициент трения;
rцапф
=0.024м- радиус цапфы;
 =( =( ) – относительная угловая скорость. ) – относительная угловая скорость.
Вращательные кинематические пары:
Пара О1
:
 ; ;
Пара А:
 ; ;
Пара О2
:
 ; ;
Пара С3
:
 ; ;
Поступательные пары:

Пара А3
:
 ; ;
Пара С5
:
 ; ;
Пара Е:

2.7. Определение мгновенной полезной мощности на входном звене и мощность электродвигателя для привода механизма.

Полная мощность механизма:
 . .
Мощность двигателя определяется:
 . .
|