|
РЕФЕРАТ
Контрольная работа: 12 страниц, 4 рисунков, 1 таблицу.
Данная контрольная работа выполнена студентом факультета энергетического на тему: Анализ устойчивости САУ.
 Целью контрольной работы является исследование на запасы устойчивости САУ. Полученные в ходе выполнения контрольной работы знания, умения и навыки должны явиться подспорьем при выполнении дипломного проекта. Целью контрольной работы является исследование на запасы устойчивости САУ. Полученные в ходе выполнения контрольной работы знания, умения и навыки должны явиться подспорьем при выполнении дипломного проекта.
 ОГЛАВЛЕНИЕ ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ…………………………………………………………………..4
1. ЗАДАНИЕ НА КОНТРОЛЬНУЮ РАБОТУ……………...……..….…5
2. ТЕОРЕТИЧЕСКАЯ ЧАСТЬ.……………………………………..….….6
3. ИССЛЕДОВАНИЕ ЗАПАСА УСТОЙЧИВОСТИ ПО
КРИТЕРИЮ НАЙКВИСТА……………………………………...….…….7
3.1. ОПРЕДЕЛЕНИЕ ЭКВИВАЛЕНТНОЙ ПЕРЕДАТОЧНОЙ ФУНКЦИИ
W
(
P
)……………………………………………………………7
3.2. ОПРЕДЕЛЕНИЕ ЗАПАСА УСТОЙЧИВОСТИ ПО
КРИТЕРИЮ НАЙКВИСТА……………………………………...….…….8
4. ОПРЕДЕЛЕНИЕ ЗАПАСА УСТОЙЧИВОСТИ ПО
ЛОГАРИФМИЧЕСКИМ ХАРАКТЕРИСТИКАМ……………………...9
ЗАКЛЮЧЕНИЕ………………………………………………..….....……...11
БИБЛИОГРАФИЧЕСКИЙ СПИСОК……………………..….....……....12
 В процессе выполнения контрольной работы проводится анализ устойчивости системы автоматизированного управления двумя методами по критерию устойчивости Найквиста и с помощью логарифмических характеристик. В процессе выполнения контрольной работы проводится анализ устойчивости системы автоматизированного управления двумя методами по критерию устойчивости Найквиста и с помощью логарифмических характеристик.
Для этого нужно проделать следующее:
- построить АФЧХ с помощью программы MATLAB на ЭВМ, по характеристике определить коэффициент передачи при фазовом сдвиге cosφ=1800
, а затем запас устойчивости,
- построить ЛАЧХ и ЛФЧХ. По ним определить коэффициент передачи при сдвиге фаз cosφ=1800
и фазовый сдвиг при коэффициенте передачи К=1, сделать выводы по устойчивости САУ, если система не устойчива дать рекомендации.
 1. заданиЕ НА КОНТРОЛЬНУЮ РАБОТУ 1. заданиЕ НА КОНТРОЛЬНУЮ РАБОТУ
Произвести анализ устойчивости системы автоматизированного управления двумя способами:
1. По критерию устойчивости Найквиста.
2. С помощью логарифмических характеристик.
Структурная схема САУ имеет вид, приведенный на рисунке 1.
Рисунок 1 Структурная схема исследуемой САУ
Передаточные функции объекта управления (ОУ), исполнительного механизма (ИМ), датчика (Д) и корректирующего устройства (КУ):
Значения коэффициентов приведены в таблице 1.
Таблица 1. Вариант задания на контрольную работу
| №
|
Параметры
|
| К1=К4
|
К2
|
К3
|
Т1
|
Т2
|
Т3
|
Т4
|
| 3
|
1,8
|
0,28
|
4,4
|
0,8
|
0,2
|
0,02
|
0,8
|
2. ТЕОРеТИЧЕСКАЯ ЧАСТЬ
Любая система должна быть работоспособной, то есть не должна быть чувствительной к сигналам непредусмотренных управляющей программой. Работоспособность определяется на основание одной из важнейших динамических характеристик – устойчивость.
Реклама

Устойчивость – это свойство системы возвращаться в исходный режим после выхода из него в результате какого-либо входного воздействия.
Простейшим и необходимым условием устойчивости (но недостаточным) является критерий, согласно которому необходимо, чтобы все коэффициенты уравнения были положительными:

 Для систем I и II порядка – это условие является и достаточным. Для исследования более сложных систем с порядком выше II необходимо условие на устойчивость по различным критериям. Для систем I и II порядка – это условие является и достаточным. Для исследования более сложных систем с порядком выше II необходимо условие на устойчивость по различным критериям.
Критерий устойчивости Найквиста.
Критерий Найквиста подразумевает исследование устойчивости систем посредством анализа АФЧХ разомкнутой САУ.
Наиболее удобным для исследования устойчивости многих систем управления технологическими процессами, является критерий Найквиста:
1. Для устойчивости замкнутой системы необходимо чтобы АФЧХ разомкнутой системы, на комплексной плоскости лежала правее точки с координатами [-1;0]. Если АФЧХ разомкнутой системы проходит через точку с координатами [-1;0], то система находится на границе устойчивости. Если АФЧХ находится левее точки с координатами [-1;0], то система является неустойчивой.
2. Чем дальше вправо сдвинута АФЧХ разомкнутой системы, тем устойчивей является система.
3. ИССЛЕДОВАНИЕ ЗАПАСА УСТОЙЧИВОСТИ ПО
КРИТЕРИЮ НАЙКВИСТА.
Критерий Найквиста подразумевает исследование устойчивости системы посредством анализа АФЧХ разомкнутой САУ. Для этого разорвем систему в любом месте (например, как показано на рисунке 2).
Рисунок 2 Расчетная схема исследуемой САУ
3.1. ОПРЕДЕЛЕНИЕ ЭКВИВАЛЕНТНОЙ ПЕРЕДАТОЧНОЙ ФУНКЦИИ
W
(
P
).
Тогда передаточная функция данной системы выглядит следующим образом:
Перемножим скобки в знаменателе:
Все коэффициенты положительны, следовательно, необходимое условие устойчивости выполняется, но т.к. порядок системы выше второго необходимо исследовать по критерию устойчивости.
Коэффициент передачи исследуемой САУ:
К
=
 3.2. ОПРЕДЕЛЕНИЕ ЗАПАСА УСТОЙЧИВОСТИ ПО КРИТЕРИЮ НАЙКВИСТА 3.2. ОПРЕДЕЛЕНИЕ ЗАПАСА УСТОЙЧИВОСТИ ПО КРИТЕРИЮ НАЙКВИСТА
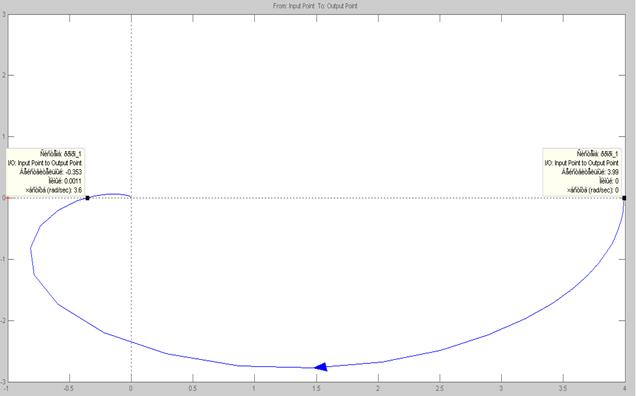
Рисунок 3. АФЧХ разомкнутой САУ.
Из рисунка 3 видно, что АФЧХ проходит правее точки с координатами [-1;0], что по критерию Найквиста указывает на устойчивость системы.
 4. ОПРЕДЕЛЕНИЕ ЗАПАСА УСТОЙЧИВОСТИ ПО 4. ОПРЕДЕЛЕНИЕ ЗАПАСА УСТОЙЧИВОСТИ ПО
ЛОГАРИФМИЧЕСКИМ ХАРАКТЕРИСТИКАМ
Найдем запас устойчивости по коэффициенту передачи из рисунка 4. Для этого из значения фазового сдвига  проведем линию до пересечения с ЛФЧХ, полученную точку поднимем до пересечения с ЛАЧХ и проведем горизонтальную линию до пересечения с осью амплитуды. Полученное значение коэффициента передачи при фазовом сдвиге найдем из выражения: проведем линию до пересечения с ЛФЧХ, полученную точку поднимем до пересечения с ЛАЧХ и проведем горизонтальную линию до пересечения с осью амплитуды. Полученное значение коэффициента передачи при фазовом сдвиге найдем из выражения:
Реклама

 ; ;
 . .
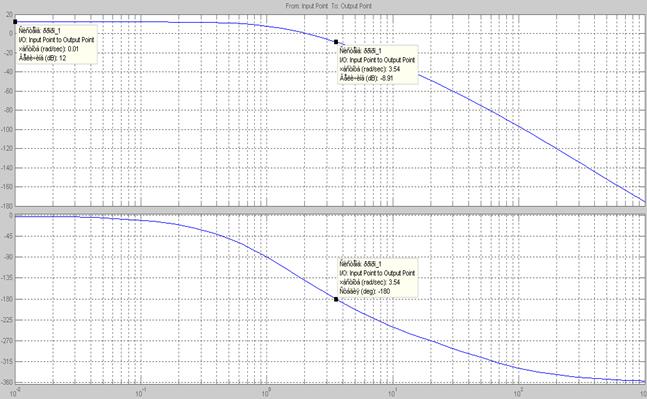
Рисунок 4. ЛЧХ разомкнутой САУ
Система устойчива, т. к. запас по коэффициенту передачи положительный.
Запас устойчивости по фазе находим следующим образом: из значения  проведем линию до пересечения с ЛАЧХ, полученную точку опустим до пересечения с ЛФЧХ и проведем горизонтальную линию до пересечения с осью значения фазы. Полученное значение сдвига фазы при коэффициенте передачи К = 1 ( проведем линию до пересечения с ЛАЧХ, полученную точку опустим до пересечения с ЛФЧХ и проведем горизонтальную линию до пересечения с осью значения фазы. Полученное значение сдвига фазы при коэффициенте передачи К = 1 (
 ), запас устойчивости по фазе составляет: ), запас устойчивости по фазе составляет:
 ; ;
Следовательно, исследуемая система устойчива.
 ЗАКЛЮЧЕНИЕ ЗАКЛЮЧЕНИЕ
При выполнении контрольной работы была построена математическая модель системы автоматического управления и рассчитана с использованием программы MATHLAB. В результате всех построений и вычислений были получены следующие результаты:
- значение коэффициента передачи при фазовом сдвиге  меньше значения -1 ( меньше значения -1 ( ); );
- значение фазного сдвига при коэффициенте передачи  меньше меньше  ( ( ). ).
Согласно этим полученным значениям можно сделать вывод что система, которую мы исследовали, - устойчива.
Библиографический список
1. Бородин И.Ф., Рысс А.А. Автоматизация технологических процессов. – М.: Колос, 1996. – 351 с.
2. Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем. – М.: Машиностроение, 1978.
3. Мартыненко И.И. Автоматика и автоматизация производственных процессов – М.: Агропромиздат, 1985.
4. Филлипс Ч., Харбор Р. Системы управления с обратной связью. –М.:Лаборатория базовых знаний, 2001. – 616 с.
|