Случайные процессы в системах автоматического регулирования.
До сих пор поведение систем автоматического регулирования исследовалось при определенных, заданных во времени задающих и возмущающих воздействиях (ступенчатая функция, импульсная функция, гармоническое воздействие и т. д.)
Однако во многих случаях характер воздействия бывает таким, что его нельзя считать определенной функцией времени. Оно может принимать с течением времени самые разнообразные случайные значения. В таких случаях мы можем оценить только вероятность появления той или иной формы воздействия в тот или иной момент времени. Это происходит не потому, что оно неизвестно заранее, а потому, что сама природа реального задающего или возмущающего воздействия такова, что величина его в каждый момент времени и процесс его изменения с течением времени зависят от множества разнообразных величин, которые случайным образом могут комбинироваться друг с другом, появляться одновременно иди с любым сдвигом во времени и т. п.
Вероятностные характеристики дискретных случайных величин. Чтобы полностью знать дискретную случайную величину “надо иметь следующие данные:
а) все возможные значения,
которые она может принимать при данных условиях задачи или опыта;
б) вероятность появления каждого из этих значений.
Графически этот закон распределения изображен на рис. 1. Он представляет собой равновероятное распределение в некотором интервале (в рассматриваемом случае от 1 до 6).
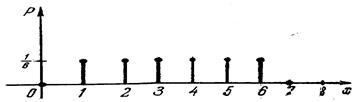
Рис. 1
В некоторых случаях закон распределения случайной величины может задаваться в аналитической форме.
Примером аналитического задания закона распределения дискретно случайной величины является часто используемый закон Пуассона. Он применим к дискретным случайным величинам, которые теоретически могут принимать все положительные значения от 0 до оо. Примерами таких .величин могут служить число пасса- жиров вагона трамвая, число вызовов на телефонной станции в течение какого-либо определенного отрезка времени, число электронов, попадающих на анод электронной лампы за определенный промежуток времени, и т. п. Этот закон записывается следующим образом для целых значений числа х:
где Р(х) — вероятность появления значения х', ^ представляет собой среднее значение данной дискретной величины, полученное по результатам большого числа опытов.
Реклама

Хотя закон распределения полностью определяет случайную величину для практики нужны некоторые более простые осредненные характеристики случайной величины, выражающиеся в виде обыкновенных неслучайных чисел.
Одной из таких характеристик является среднее значение, или математическое ожидание, случайной величины. Оно определяется из выражения
Часто используется так называемое среднеквадратичное значение случайной величины, представляющее собой корень квадратный из среднего квадрата случайной величины:
Иногда рассматривается центрированное значение случайной величины д"о = х— х, где х — среднее значение. Тогда аналогично формуле можно ввести понятие центрального момента м-го порядка

Из формулы следует, что центральный момент первого порядкавсегда равен нулю.
Обратимся теперь к характеристикам рассеяния дискретной случайнойвеличины.
Если х — случайная величина, x` — среднее значение этой величины, то величина х —х` есть отклонение случайной величины от ее среднего значения. Это отклонение является случайной величиной, как и сама величина х.
Средним отклонением D называется среднее значение (математическое ожидание) абсолютной величины отклонения, т. е.

Дисперсией называется средний квадрат отклонения случайной величины от ее среднего значения. Она совпадает с центральным моментом второго порядка

Вероятностные характеристики непрерывных случайных величин. Непрерывная случайная величина может принимать все значения в каком-либо заданном ограниченном интервале (а < х < b) или все значения от —оо до +оо. Следовательно, функция распределения (интегральный закон распре- деления) для непрерывной случайной величины будет изображаться непрерывной кривой. На рис. 2 показаны оба упомянутых выше варианта.
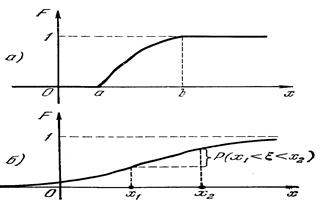
Вероятность того, что непрерывная случайная величина примет определенное числовое значение х, бесконечно мала (например, вероятность попадания центра тяжести снаряда в определенную точку цели). Вероятность же того, что непрерывная случайная величина окажется в некотором промежутке х1<. х<.х1будет иметь конечное значение, а именно:

Вероятность того, что непрерывная случайная величина содержится в промежутке между х и х + dх, будет

Величина
называется плотностью вероятности.
Закон распределения для непрерывной случайной величины в отличие от дискретной задается не в виде значений вероятности, а в виде плотности вероятности w(х), называемой также дифференциальным законом распределения. На рис. 3 показаны дифференциальные законы распределения для
Реклама

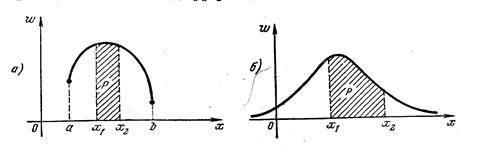
двух вариантов функции распределения F (x), показанных на рис. 2.
Если бы здесь использовалось то же понятие закона распределения, что и длядискретной случайной величины, то получились бы бесконечно малые ординаты Р(х).
Рассеяние непрерывной случайной величины можно оценивать однимиз следующих значений, словесные формулировки которых остаются прежними.
Среднее отклонение (мало удобная для вычислений величина)
Дисперсия (наиболее удобная для вычислений величина)
Среднеквадратичное отклонение
Случайные процессы
Случайная величина х,
изменяющаяся во времени ^
называется случайным или стохастическим процессом. Случайный процесс не есть определенная кривая х (t), а является множеством возможных кри
вых х {1
), так же как случайная величина не имеет определенного значения, а является сово
купностью (множеством) возможных значений.
Можно еще сказать, что случайный процесс есть такая функция времени, значение которой в каждый момент времени является случайной величиной.
Примерами случайн
ых п
роцессов могут, наприме
р, яв
лять
ся: коорди
наты самолета, замеряемые радиолокационной
стан
цией; угол визирования
движущейся цели головкой самонаведения; помехи в системе
телеуправления; нагрузка электрической сети и т. п.
Итак, в случайном процессе нет определенной зависимости х
{
t).
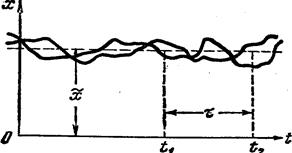
Каждая кривая множества (рис.4) является л
ишь отдельной реализацией с
лучайн
ого процесса. Никогда нельзя сказать заранее, по какой кривой пойдет процесс.
Однако случайный проц
есс может быть оценен некоторыми вероятностными характеристиками.
В каждый отдельный момент времени наблюдаются случайные величины каждая из которых имеет
свой закон распределения. Поскольку это — непрерывная случайная величина, то надо пользоваться понятием плотности вероятности.
Обозначим w(x,t) закон распределения для всех этих отдельных случайн
ых ве
ли
чин
. В общем случ
ае
он меняется с течением времени,
:

причем по свойству для каждого из них
Для каждого заданного момента времени можно найти характеристики случайных величин, определенные. В результате будем иметь среднее по множеству
(математическое ожидание)
и дисперсию

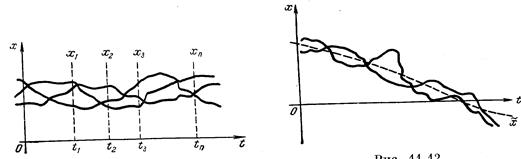
Среднее значение случайного процесса представляет собой некоторую среднюю кривую (ри
с. 11.12), около которой группируются все возможные отдельные реализаци
и этого процесса, а дисперсия D(t)
или среднеквадратичное отклоне
ние s
(t)
характеризуют рассеяние отдельных возможных реализаций процесса около этой средн
ей кривой.
Простейшим типом случайного процесса является чисто случайный процесс.
В таком процессе
все знач
ен
ия случайной величин
ы в отдельные м
оменты времени не зависят друг от друга. Тогда появления значений
(x1,t1)
и т. д. будут независимыми случай
ны
ми
. собы
тиями
, дл
я которых вероятность их совместного наступления равна, как известно, произведению вероятностей наступления каждого из них в отдельности. Следовательно, для чисто случайного процесса

и вообще

Это — самые простые соотношения в теории случайных процессов.Онимогут применяться для характеристики некоторых видов помех (чисто случайные хаотические помехи).
Для характеристи
ки полезных входных сигналов систем регулирования и следящих систем соотношения практи
чески не могут
применяться, так как для этих сигналов ход процесса в последующие моменты времени в какой-то степен
и зависит от того, что было в предыдущие моменты времени,
Так, например, если речь идет о слежении за самолетом, то он не может как угодно быстро менять свое положение и скорость. Поэтому если он в момент времени t занял положение х
1
то этим самым его возможное положение х
2
в следующий момент t2
ограничено, т. е.
события (x1,
t1) и (
x2
,
t2) не будут независимыми. Чем более инерционен изучаемый объект, тем больше эта взаим
озависимость, или корреляция. В таких случаях вместо формулы
необходимо записать

где
w2,1 1 {
x2, t2)dх —
условная вероятность того, что случайн
ый процесс пройдет вблизи точки (x2,
t2), есди
он уже прошел через точку (
x1,t2).
Следовательно, зная плотности вероятности, можно найти также и условную плотность вероятности

'
Кроме того, имеет место следующая связь между основными
плотностями вероятности:
так как
w (х
1,
t1) есть плотность вероятности случайной величины
(x1,
t1) безотносительно к тому, какое потом будет значение (x2,
t2),
т. е.
допускается —оо
<
х
2
<
+
оо.
Аналогичным образом любая плотн
ость вероятности низшего порядка всегда может быть получена из высшей
, т. е. выс
шие плотности вероятностей содержат наибольшее кол
ичество инф
ормации о случайном процессе (о взаимосвязях между возможными знач
ениями случайной величины х
в различные моменты вр
емени).
Написанные соотношения справедливы для случайных проц
ессов любых типов. В зависимости же от того, до какого порядка принимают
ся во внимание плотности вероятности, а также от разных дополнительных гипотез
о формах связи между w1,
w2,
.
.
.,
wп
рассматриваются разные типы
случайных процессов в отличие от чисто случайных.
Стационарные случайные процессы
Стационарным случайным процессом
называется такой процесс, вероятностные характеристики которого не зависят от времени. Все плотности вероятностей w1, w2, .. ., wn
не меняются при любом сдвиге рассматриваемого участка процесса во времени, т. е. при сохранении постоянной разности.
Можно сказать, что стационарный случайный процесс в какой-то мере аналогичен обычным стационарным иди установившимся процессам в автоматических системах.. Например, при рассмотрении обычных установившихся периодических колебаний ничего не изменится, если перенести начало отсчета на какую-нибудь величину. При этом сохранят свои значения такие характеристики, как частота, амплитуда, среднеквадратичное значение и т. п.
В стационарном случайном процессе закон распределения один и тот же для каждого момента времени, т. е- плотность вероятности не зависит от времени: w(х, t)
= w
(x).
Отсюда получаем x`= соnst b s=const вдоль всего случайного процесса. Следовательно, в стационарном случайном процессе средняя линия, в отличие от общего случая будет прямая х` =
соnst, подобно постоянному смещению средней линий обычных периодических колебаний. Рассеяние значений переменной х в стационарном случайном процессе определяемое s=const также будет все время одинаковым, подоено постоянному значению среднеквадратичного отклонения обычных установившихся колебаний от средней линии.
Аналогичным образом и двумерная плотность вероятности также будет одна и та же для одного и того же промежутка
и также для n-мерной плотности вероятности.
Задание всех этих функций распределения плотности определяет случайный процесс. Однако более удобно иметь дело с некоторыми осредненными и характеристиками процесса.
Прежде чем перейти к ним, отметим два важных для практики свойства. 1. Ограничиваясь только стационарными случайными процессами, можно будет определить только установившиеся (стационарные) динамические ошибки автоматических систем при случайных воздействиях. Такой прием применялся и ранее при рассмотрении регулярных воздействий, когда определялись динамические свойства систем регулирования по величине динамических ошибок в установившемся периодическом режиме.
2. Стационарные случайные процессы обладают замечательным свойством, которое известно под названием эргодической гипотезы.
Для стационарного случайного процесса с вероятностью, равной единице (т. е. практически достоверно.
В самом деле, поскольку вероятностные характеристики стационарного случайного процесса течением времени не меняются,то длительное наблюдение случайного процесса на одном объекте (среднее по времени) дает в среднем такую же картину, как и большое число наблюдений, сделанное в один и тот же момент времени на большом числе одинаковых объектов (среднее по множеству).
Для многих случаев существует математическое доказательство этого свойства. Тогда оно сводится к эргодической теореме.
Итак, среднее значение (математическое ожидание) для стационарного процесса будет
Аналогичным образом могут быть записаны моменты более высоких порядков — дисперсия, среднеквадратичное отклонение и т. п.
Эргодическая гипотеза позволяет сильно упрощать все расчеты и эксперименты. Она позволяет для определения х. D,
s:, вместо параллельного испытания многих однотипных систем в один и тот же момент времени, пользоваться одной кривой х{t),
полученной при испытании одной системы в течение длительного времени.
Таким образом, важное свойство стационарного случайного процесса состоит в том, что отдельная его реализация на бесконечном промежутке времени полностью определяет собой весь случайный процесс со всеми бесчисленными возможными его реализациями. Этим свойством не обладает никакой другой тип случайного процесса.
Корреляционная функция
Начальный корреляционный, момент двух значений случайной функции х (t)
и х (t1),
взятых в моменты времент t и t1,
носит название корреляционной (автокорреляционной) функции.
Она может быть найдена из выражения.

где w2
(x,t,x1, t1) —
двумерная плотность вероятности.
Иногда под корреляционной функцией понимают центральный корреляционный момент x (t) и x (t1), т.е.

В этом случае корреляционная функция может быть представлена в виде суммы
Корреляционная функция является весьма универсальной характеристикой для случайного процесса. Она определяет зависимость случайной величины в последующий момент времени x(t1)
от предшествующего значения х (t)
в момент времени t.
Это есть мера связи между ними.
Рассмотрим основные свойства корреляционных функций.
1. Из определения корреляционной функции следует свойство симметрии:

2. При t1=t
корреляционная функция дает средний квадрат случайной величины, a R0(t,t1)
—дисперсию:

3. Можно показать, что прибавление к случайным величинам произвольных неслучайных величин не меняет их корреляционных моментов и дисперсии. Поэтому корреляционная функция R0 (t,
t1) не изменится, если к случайной функции добавить произвольную неслучайную функцию. Это свойство не относится к функции R (t, t1),
так как добавление неслучайных величин к случайным изменяет начальные моменты. В этом случае корреляционная функция будет равна сумме корреляционных функций случайной и неслучайной функций.
Иногда в рассмотрение вводится нормированная
корреляционная функция
Аналогично корреляционной функции можно ввести понятие взаимной корреляционной функции
для двух случайных величин х (t)
и у (t):

В случае тождественного равенства нулю взаимной корреляционной функции случайные функции х (t)
и у (t)
называют некоррелированными.
.Если взаимная корреляционная функция отлична от нуля, то х {t)
и у {t)
носят название коррелированных случайных функций.
В случае стационарности процесса корреляционные функции R (t, ti)
и R0 (t, ti)
не будут зависеть от текущего значения времени t
и будут определяться только временным сдвигом t = t1—t.
Спектральная плотность стационарных процессов
Рассмотрим так называемую энергетическую форму интеграла Фурье. Если рассматривается некоторая случайная функция времени х {t),
то для нее эти формулы могут быть записаны в виде
Возьмем квадрат модуля изображения Фурье [ F
(iw)) ]2 и проинтегрируем по всем частотам от—оо до -оо с делением результата на 2n:

В последнем выражении квадрат модуля заменен произведением сопряженных комплексов F (iw)
и F
(—iw). Изображение Фурье F (iw)
заменим выражением


Величина, находящаяся в квадратных скобках, как нетрудно видеть, является исходной функцией времени. Поэтому в результате получается так называемая формула Релея (теорема Парсеваля), которая и соответствует энергетической форме интеграла Фурье:
Подставляя w = 2nf, получим

Правая часть представляет собой величину, пропорциональную энергии рассматриваемого процесса. Так, например, если рассматривается ток, протекающий по некоторому сопротивлению R,
то энергия, выделившаяся в этом сопротивлении за время t,
будет

Из (11.58) и (11.59) вытекает, что для нахождения энергии рассматриваемого процесса за бесконечный интервал наблюдения с равным основанием можно интегрировать квадрат функции времени по всему времени от —оо до +oo или интегрировать квадрат модуля изображения Фурье по всем частотам от—оо до +оо.
Однако эти формулы неудобны тем, что для большинства процессов энергия за бесконечный интервал времени стремится также к бесконечности. Поэтому удобнее иметь дело не с энергией, а со средней мощностью процесса, которая будет получена, если энергию поделить на интервал наблюдения. Тогда формулу можно представить в виде

Правая часть представляет собой средний квадрат рассматриваемой величины х {t).
Вводя обозначение
можно переписать формулув виде
иле в виде
Величина S
(w) или S
(2лf) носит название спектральной плотности.
Важным свойством спектральной плотности является то, что интегрирование ее по всем частотам от —оо до + оо дает средний квадрат исходной функции времени х (t).
По своему физическому смыслу спектральная плотность есть величина, которая пропорциональна средней мощности процесса в интервале частот от w до w+ dw.
В некоторых случаях спектральную плотность рассматривают только для положительных частот, удваивая ее при этом, что можно сделать, так как спектральная плотность является четной функцией частоты. Тогда, например, формула должна быть записана в виде

где S0(w) = 2S
(w) — спектральная плотность для положительных частот. Однако в дальнейшем изложении будет рассматриваться спектральная плотность, соответствующая всему диапазону частот от —оо до +-оо,
так как при этом формулы получают более симметричный характер.
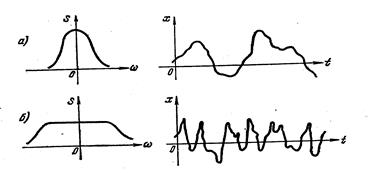
Как видно из этого рассмотрения, связь между видом спектральной плотности и видом функции времени получается обратной по сравнению со связью между корреляционной функцией и самим процессом Отсюда вытекает, что более “широкому” графику спектральной плотности должен соответствовать более “узкий” график корреляционной функции и наоборот.
Вычисление спектральной плотности неудобно делать по соотношению, так как это связано с трудностью предельного перехода. Обычно
спектральная плотность вычисляется по известной кореляционной функции при помощи формул
Расчеты по минимуму среднеквадратичной ошибки
Если на автоматическую систему действуют одновременно полезный сигнал и помеха, то возникает задача оптимального расчета системы с тем, чтобы получить наименьшую результирующую ошибку. С точки зрения наилучшего воспроизведения полезного сигнала система должна иметь возможно большую полосу пропускания, а с точки зрения наилучшего подавления помехи система, наоборот, должна иметь возможно меньшую полосу пропускания. Критерием получения оптимального решения здесь будет минимальное значение результирующей ошибки системы, определяемой полезным сигналом и помехой.
Для случайных величин наиболее просто определить среднеквадратичную ошибку, поэтому ее и используют для оценки точности автоматической системы.
Рассмотрим расчет системы по критерию минимума среднеквадратичной ошибки
при одновременном действии полезного сигнала и помехи.
Согласно этому критерию, нежелательность ошибки пропорциональна квадрату ее величены. Такая постановка является часто логичной, но она не может, конечно, претендовать на полную универсальность. В некоторых случаях например при стрельбе по какой-либо цели, все ошибки, большие некоторого значения, являются одинаково нежелательными. Однако средний квадрат ошибки системы регулирования
практически во всех случаях является наиболее просто вычисляемой величиной, что и определило использование этого критерия.
Возможны несколько формулировок задачи. Наиболее просто задача может быть сформулирована так. Если имеется 'какая-то система автоматического регулирования заданной структуры, то необходимо так выбрать параметры этой системы, чтобы .получить минимум среднеквадратичной ошибки при заданных статистических характеристиках полезного сигнала и помехи.
Эта задача решается следующим образом. По спектральной плотности ошибки путем ее интегрирования находится дисперсия. Дисперсия получается зависящей от вероятностных характеристик полезного сигнала, помехи и параметров системы. Затем ищутся условия, которые должны быть
наложены на параметры системы, чтобы получить минимум дисперсии. При достаточно простом выражении для дисперсии это может быть определено непосредственным дифференцированием и приравниванием нулю частных производных.
В более сложных случаях приходится искать минимум дисперсии путем числового задания интересующих параметров и построения соответствующих графиков, а также расчетом на ЭВМ.
Нахождение оптимальной передаточной функции еще не означает, что реальная автоматическая система может быть выполнена оптимальной, так как реализация ее может Ныть сопряжена с большими трудностями. Оптимальную передаточную функцию, за исключением простейших случаев, следует считать идеальной функцией, к которой по возможности надо стремиться при выполнении реальной автоматической системы,
Литература
1. А. А. Воронов. Основы теории автоматического регулирования и управления
2. В. А. Бесекерский, Е. П. Попов Теория систем автоматического регулирования
3. Я. З. Цыпкин. Основы теории автоматических систем
4. А. А. Воронов. Основы теории автоматического регулирования и управления
|
