Групповой полет летательных аппаратов – алгоритм обработки информации относительного движения
Абакумов А.В., асп., Шкаев А.Г., асп., Саратовский государственный технический университет
Введение
В настоящее время наблюдается значительное повышение интереса к беспилотным летательным аппаратам (БЛА). Это происходит на фоне успешного применения БЛА в ряде военных конфликтов: в Афганистане, Югославии, где применялись американские БЛА RQ-1 “Предатор”, в Чечне, где российская армия использовала БЛА “Пчела”.
До сих пор практически все БЛА имели только лишь военное назначение и относились в основном к двум основным классам: разведчики и мишени. На сегодняшний день область применения и возможности БЛА значительно расширились, появилось множество новых задач для существующих и перспективных БЛА, как военного, так и гражданского назначения. Такими задачами являются, например, применение оружия (БЛА “Предатор” США), многочасовые полеты (“Глобал Хоук” США, С-62 Россия), сельскохозяйственные задачи (разработки таких БЛА ведутся в настоящее время в Японии) и т.д.
В этом ряду одной из важнейших является задача обеспечения группового полета БЛА. При ее решении возникает ряд существенных технических проблем, поиск решения которых в настоящее время проводятся как в России, так и за рубежом. Существовавшие до сих пор разработки в области автоматического управления групповыми полетами летательных аппаратов были ориентированы преимущественно на управление строем пилотируемых самолетов с большими дальностями между ними, а для БЛА выдвигаются требования полета в строю с дистанциями и интервалом 30-150 метров.
В данной работе осуществляется исследование алгоритмов обработки информации с целью определения параметров относительного движения БЛА в групповом полете и предлагается алгоритм оценивания параметров движения ведущего ЛА по результатам измерений относительного движения.
1
. Проблемы управления БЛА в группе. Постановка задачи обработки информации
Современное развитие авиации поставило задачу выполнения совместного полёта группы беспилотных летательных аппаратов.
В связи с этим задача управления БЛА в группе с высокой точностью приобретает особую важность. Необходимость развития техники полёта БЛА в строю выдвигает в настоящее время очень важное направление: создание систем межсамолётной навигации
(СМСН) для БЛА с весьма ограниченными весом и объёмом. Эта необходимость определяется ещё тем, что отсутствие в бортовом оборудовании БЛА
СМСН может существенно ограничить в ряде случаев их возможности.
Реклама

В силу ряда причин задача автоматического управления полётом летательных аппаратов (ЛА) в групповом порядке представляет собой одну из наиболее сложных и специфических научно-технических проблем авиации, тр
ебую
щая комплексного решения. Оно состоит в необходимости тактического обоснования рациональных видов стро
ев, количества ЛА в группе
, в определении идеологии сбора ЛА в группу, в выборе методов синхронного управления каждым ЛА группы для обеспечения безопасности полёта и точного
выдерживания каждым ЛА группы своего места в строю на прямолинейных и криволинейных участках полёта всей группы в целом. Причём, возможность управления группой усложняется нестационарностью параметров полёта. Методы управления ЛА определяют основные принципы, которые используются при п
роектиро
вании систем управления ЛА в группе [1].
Понятно, что для обеспечения необходимой точности процесса управления полётом строем ЛА С
МСН должна строиться в виде системы с обратной связью по информации о взаимном положении. Это поз
воляет с единой точки зрения рассмотреть систему управления полётом ЛА в строю и дать единую математическую базу её описания. Автоматизация управления полётом ЛА в групповом порядке связана не только с разработкой теоретических осно
в полёта, но и с разработкой бортовых технических средств измерения относительного положения и систем управления. Проведённый анализ состояния средств определения взаимных координат показал, что ни одно из существующих и разрабатываемых в настоящее время измерительных с
редств не обеспечивает сов
ременных требований определения взаимных координат в плотных группах. В нашей стране разработана лишь автоматизированная система во
ждения самолётов
в строю типа "К
упол". Она предназначена для военно-транспортных самолётов. Эта система позволяет выдерживать строй ЛА с ря
дом ограничений
, таких как автоматизация только бокового канала управления, невозможность
выдерживания малых дистанций.
Создание средств измерения относительного местополо
жен
ия
ЛА в гр
уппе решает проблему обеспечения полёта
ЛА в строю не полностью. Необходимо решать также задачу автоматизации обработки информации о параметрах относительного движения и параметрах полёта с целью формирования алгоритмов управления.
Реклама

Ввиду сложности задачи возможны различные подходы к её решению, отличаю
щиеся как распределением функций управления между наземным пунктом управления и бортом, так и выбором принципов, которые могут быть поло
жены в основу системы управления и которые определяют её конструктивные и динамические характеристики. Исследованию вопросов автоматизации управления полётом строя ЛА посвящены работы наших отечественных учёных: В.А.Боднера, А.А.Красовского,
Ю.П.Доброленского, В.Г.Тарасова, С.В.Петрова. В работах этих учёных были сформулированы общие требования к системам автоматического управления группой самолётов: представлено математическое описание строя
, как объекта управления, проведены исследования задачи управления самолётами в группе, по результатам которых сделан
вывод о том, что строй, как динамическая система сам по себе, без регуляторов, принципиально неустойчив на всех режимах полёта, даны технические предложения по построению систем управления строем самолётов. В фундаментальной работе [2] рассмотрены вопросы теории автоматизированных СМСН. Представлен большой обзор по системам управления полётом группы ЛА и методам измерения параметров относительного д
вижения самолётов
.
Математической основой рассматри
ваемых в этой работе методов решения задач межсамолётной навигации является теория оценивания и фильтрации. В работе [3] излагаются основы и специфика применения методов теории нелинейной фильтрации марковских последовательностей и процессов в задачах обработки навигационной информации. Рассматриваются подходы, используемые при решении различного рода нелинейных задач, при этом значительное внимание уделяется тем из них, в которых применение алгоритмов, основанных на линеаризации, неприемлемо. Анализ этих работ показывает
, что их результаты ориентированы на построение СМСН для полёта в строю с большими дальностями между ними и поэтому не могут быть в полной мере использованы в
СМСН
БЛА, так как для них выдвигаются требования полёта в строю с дистанциями и интервалом 30-150 м. В этих работах недостаточно полно рассматривались вопросы выбора структуры управления и её параметров, исследования динамики и точности стабилизации с учётом нелинейностей в математической модели
ЛА и модели относит
ель
ного движения. В настоящее время не разработаны стандартные алгоритмы СМСН, как это сделано в навигации. Поэтому задача разработки алгоритмического обеспечения полётом ЛА, и в том числе
БЛА в строю, весьма актуальна.
Развитие СМСН идёт двумя путями
: создание автономных систем, не завися
щих от наземных средств, и систем
, использующих наземные радиомаяки. Каждому из этих путей присущи свои преимущества и недостатки. Второй путь имеет один из недостатков, связанный с точностью определения взаимных координат движущихся в группе ЛА, что не позволяет использовать данный принцип для полёта БЛА
в плотных групповых порядках. Так, ошибки в определении относительного положения ЛА в группе могут достигать величин 30-400
м в зависимости от дальности до радиомаяков (к примеру современная радионавигационная система “Тропик” позволяет определять координаты с точностью 0,13 — 1,3 км). В то же время данная идеология может быть применена для полёта большого количества ЛА по несколько ЛА в плотных группах, причём, эти группы ЛА могут находиться между собой на расстояниях до десятков километров (по принципу "ведущий с ведущим
"). Другим и основным недостатком такого пути является то
, что он обеспечивает вождение ЛА в групповых порядках только в пределах прямой видимости радиомаячных систем. По мнению зарубежных специалистов
, применение на
земной аппаратуры для автоматического управления полётом группы ЛА технически легче реализуется
, не накладывает ограничений на ма
ссу, объём и условия эксплуатации аппаратуры. Однако эти выводы не являются достаточно убедительными, поскольку автономная
САУ позволяет решать задачи полёта строем без ограничений, накладываемых каналами связи с наземным пунктом управления, а также в условиях радиопротиводействия. Что касается вож
дения в строю беспилотных самолётов с использованием наземного радиотехниче
ского комплекса, в
состав которого входит обзорный радиолокатор
, то относительно низкая разрешающая способность обзорного радиолокатора не может обеспечить определение координат с достаточной точностью, необходимой для вождения ЛА с требуемыми параметрами строя. Поэтому групповой полёт строем может быть осуществл
ен при ди
станции между ЛА не менее 1,5-2 км. Использование методов корреляционно-экстремальной навигации, которые получили в настоящее время большое применение в современных пилотажно-навигационных комплексах, невозможны для СМСН БЛА в плотных боевых порядках из-за ограниченной точности
, которая, по зарубежным данным, характеризуется сотнями метров
. Таким образом, её применение недостаточно для полёта в плотных боевых порядках на основе четырёхмерной навигации каждого из
ЛА. Однако этот принцип может быть использован для за
дачи сбора ЛА в группу. В этом слу
ча
е на
стади
и
подготовки
полётного задания каждому
ЛА назначается точка в трёхмерном пространстве, в которую он должен прибыть в назначенный момент времени в заданном направлении.
Автономное управление полётом ЛА в строю на основе измерений параметров относительного движения, получаемых с помощью дальномерных и угломерных средств локации и визирования ведущего ЛА ведомым, позволяет обеспечить полёт в группе при дальностях между ними 30-150
м.
В некоторых случаях автономное управление не всегда осуществимо из-за малой дальности действия
системы измерений параметров отно
сительного движения
, т.
е. не может быть решена задача сбора ЛА в группу. Поэтому в некоторых случаях может оказаться необходимым использование комбинированного управления. При достаточно больших расстояниях между ЛА используется неавтономное управление, а при малых автономное управление.
Таким образом, проведённый выше анализ теоретических работ и состояние уровня исследований, посвященных вопросу автоматизации упра
вления ЛА в строю, показал, что принципы, заложенные в их основу, не позволяют в полной мере реализовать их в СМСН БЛА.
Нереш
енные по данной проблематике задачи обусловливают актуальность разработки алгоритмов управления и обработки информации для СМСН БЛА, с помощью которых осуществляется
выдерживание СМСН заданных параметров строя в прямолинейном полёте и при маневрировании ведущего БЛА.
Проблемы упра
вления ЛА в группе можно объединить в три группы.
Первая группа проблем с
вязана с решением задачи выбора алгоритмов управления и обработки информации для полёта ЛА в строю. Вторая группа проблем определяет
ся задачей построения
САУ, которая будет вести ЛА согласно выбранному закону с точностью, получаемой из условия бе
зопасности, и
, наконец, задача
, к которой относится третья группа проблем
, заключается в выборе технических средств, с помощью которых можно обеспечить полёт ЛА в строю.
Технические средства, позволяющие осуществлять групповой полет ЛА, это прежде всего те приборы и устройства, которые позволяют определять параметры относительного движения ЛА. Они должны обеспечивать получение необходимой дальномерной и угломерной информации. Эта измерительная аппаратура может быть основана на самых различных физических принципах радиотехнических
, оптических,
квантомеханических. На сегодняшний день наиболее перспективным представляется путь использования радиотехнических средств измерения дальности и углов места и азимута. Наличие радиолокатора на борту ЛА позволяет не только обеспечивать групповой полет ЛА, но и существенно расширить его возможности. Более того, большинство современных ЛА уже имеют бортовые РЛС различного назначения (метеонавигационные, наведения, обзорные, и т.д.). Для бортовой РЛС наиболее оптимальным является использование миллиметрового диапазона волн.
Несмотря на относительно высокое затухание (0,1-0,2 дБ/км) снижающее дальность обнаружения, миллиметровые волны обладают следующими преимуществами, обеспечивающими высокое разрешение во времени и пространстве:
получение узких диаграмм направленности в приемлемых апертурах,
широкие полосы частотных каналов при значительном их числе, т.е. при решении задач электромагнитной совместимости (ширина полосы окна прозрачности на 8,6 мм, равная 12 ГГц превышает весь диапазон сантиметровых волн),
эффективная поверхность рассеивания целей в миллиметровом диапазоне значительно возрастает по сравнению с сантиметровым.
Указанные преимущества очевидны и попытки их использования начались с середины 50-х годов. Однако лишь в 80-90-е годы удалось создать достаточно технологичную элементную базу с приемлемыми параметрами.
В настоящее время средняя мощность твердотельных выходных устройств может достигать десятка Ватт, а чувствительность малогабаритного приемника 600-900 К, что обеспечивает выполнение основных требований к бортовой РЛС.
Ниже приводится краткий обзор существующих зарубежных бортовых радиолокационных и навигационных станций.
РЛС WX-50 фирмы Вестенгауз прошла испытания на самолетах TA-41, OV-10 и вертолете UH-1N. Некогерентная РЛС 8 мм диапазона обеспечивает работу в следующих режимах:
облет препятствий и следование по рельефу местности,
обнаружение и селекция наземных и движущихся целей,
картографирование земной поверхности,
измерение высоты полета,
пеленгация источников излучения (маяков).
РЛС AN APQ-137B, работающий в диапазоне частот 34,5 ГГц и позволяющий обнаруживать движущие наземные цели. Радиолокатор размещается в подвесном контейнере.
РЛС Saiga-2 фирмы МарсельДассо 8 мм диапазона предназначен для предотвращения столкновений с препятствиями и воздушными объектами и обеспечивает полет в режиме следования рельефу местности при неблагоприятных метеоусловиях и в ночное время. Этот радиолокатор может также использоваться для навигационных целей.
РЛС E391, разработанная фирмой EM1 Электроникс (Англия), представляет собой аппаратуру высокого разрешения. Этот локатор может устанавливаться как на самолете, так и в отдельном контейнере.
Одним из отечественных аналогов этой аппаратуры является РЛС “Алмаз”. Основной особенностью этой РЛС является применение 8 мм диапазона, высокая разрешающая способность по дальности (до 4 м) и углу (до 1,2°), малая импульсная мощность (3 Вт) при низкой скважности.
Станция основана на использовании квазинепрерывного широкополосного сигнала с линейной частотной модуляцией. База сигнала 20000 позволяет обеспечивать высокую помехоустойчивость в условиях естественных и искусственных помех.
Корреляционная свертка сигнала, используемая для сжатия спектра, дополнена цифровой расфильтровкой по дальностным каналам, что позволяет варьировать технические характеристики РЛС, адаптируя систему обработки к конкретной задаче и радиолокационной обстановке.
Таблица 1
Тип РЛС
Параметр
|
WX-50 |
AN/APQ-137B |
Saiga-2 |
Алмаз |
| Рабочая частота (ГГц) |
35 |
70 |
35 |
36 |
| Мощность в импульсе (КВТ) |
100 |
0,5 |
7 |
0,003 |
| Частота повторения (кГц) |
2 |
2,4 |
0,2 |
До 100 |
| Длительность (мкс) |
0,2 |
0,04-0,12 |
До 100 |
| Ширина диаграммы (град) |
1,5 |
0,6
0,3
|
1,3 |
1,2 |
| Угловая скорость антенны (°/с) |
60 |
50 |
120 |
| Масса (кг) |
64 |
15 |
53 |
28 |
| Объем (дм3) |
70 |
20 |
65 |
50 |
Что касается выбора алгоритмов управления и обработки информации, то в общем случае алгоритм управления полётом ЛА в гр
уппе, реализованный в
БЦВМ, должен обеспечивать решение следующих основных задач [2]:
обработка результатов измерений с целью получения оценок параметров дви
жения, используемых при определении управляющих воздействий,
определение отклонений расчётных параметров от требуемых заданий,
вычисление управляющих воздействий,
отработка управляю
щих воздействий с помощью внутренних контуров управления и автомата управления тягой двигателя.
Настоящая работа посвящена исследованию алгоритмов обработки информации СМСН с целью определения параметров движения ведущего ЛА и относительного движения. В этом случае нетрудно реализовать алгоритмы СМСН БЛА.
Задачу обработки информации относительного движения рассматривали при полном составе измерений: углах визирования, угловой скорости линии визирования, дальности и скорости изменения дальности.
Ключевым вопросом при решении этой задачи является разработка математической модели относительного движения ЛА.
Поскольку измерения содержат случайные ошибки, алгоритм оценки должен быть эффективным в смысле их снижения и снижения влияния этих ошибок на точность получаемых оценок параметров движения ведущего ЛА, то есть алгоритм обработки информации должен обеспечивать фильтрацию ошибок измерений и идентификацию параметров движения ведущего ЛА.
2. Уравнения относительного движения системы ведущий-ведомый ЛА.
Из задач, возлагаемых на СМСН, основными и наиболее трудоемкими являются задача сбора ЛА в группу и задача управления полетом группы ЛА. Для них актуальны проблемы обработки измерительной информации с целью получения оценок параметров движения (задача идентификации и оценки) и определения по этим оценкам управляющих воздействий, обеспечивающих полет ЛА в групповом порядке (задача управления). Математическая формулировка этих задач и выбор методов их решения тесно связаны с выбором математической модели процесса управления ЛА в группе. Математическая модель движения представляет собой объективную схематизацию действительного движения объекта, достаточно полно отражающую основные закономерности этого движения в наиболее простом и удобном виде для изучения и решения поставленной задачи. Основная трудность исследования полета ЛА в группе заключается в том, что при рассмотрении задач моделирования, синтеза алгоритмов управления, исследования алгоритмов обработки информации необходимо использовать несколько математических моделей. Существующие модели, предложенные для решения этих задач, построены не для всех условий. В связи с этим непосредственное использование известных математических моделей в настоящей работе затруднено, поскольку любая из них имеет определенное назначение и не учитывает в полной мере требований, вытекающих из указанных задач. Необходимо повторить вывод дифференциальных уравнений динамики с учетом направленности настоящей работы.
Сначала выведем уравнения относительного движения ЛА для общего случая, к которым затем в зависимости от цели исследования будем добавлять уравнения других видов. Структура модели может быть определена аналитическим путем исходя из физических законов, определяющих поведение объектов. Естественно, что наиболее простой является модель группы, состоящей из двух ЛА. Ее мы и будем рассматривать.
В общем случае модель движения ЛА в группе включает в себя: модель движения каждого ЛА как материального тела, кинематические и динамические уравнения относительного движения ЛА, модель работы аппаратуры управления, составляющие в совокупности модель замкнутой динамической системы. В состав модели работы аппаратуры управления включают исполнительные органы и неизменяемые части измерителей, т.е. учитываются их динамические характеристики.
При математическом описании объекта управления и разработке модели его движения устанавливают:
динамические свойства объекта, т.е. реакцию объекта на действие всей совокупности входных сигналов управления и возмущений;
характер информации о параметрах движения объекта, которая может быть получена с помощью датчиковой аппаратуры;
ограничения и другие специфические требования, предъявляемые к движению объекта.
Для построения таких моделей, описывающих движение каждого ЛА отдельно, а также относительное движение рассматриваемых ЛА между собой, нужно найти число степеней свободы, однозначно определяющих движение, установить характер и законы изменения внешних воздействий, действующих на ЛА группы, после чего выбрать системы координат и составить дифференциальные уравнения движения.
Движение ЛА, как известно из [4], складывается из поступательного движения его центра масс, определяющего траекторию полета, и вращательного движения вокруг центра масс, определяющего угловое положение ЛА относительно инерциального пространства. При движении ЛА в атмосфере Земли эти две составляющие общего движения взаимосвязаны и должны рассматриваться совместно. Тогда движение отдельного ЛА будет иметь шесть степеней свободы (три поступательные и три вращательные).
В основу математической модели отдельного ЛА положена нелинейная система дифференциальных уравнений, описывающая движение ЛА в пространстве [4].
Как уже отмечалось, задача управления групповым движением связана с необходимостью изучения движения ЛА, находящихся в определенных взаимоотношениях. Поэтому на первый план выступает исследование их относительного движения, математическая модель которого и составляет объект управления.
Движение двух ЛА друг относительно друга представляет собой разность двух абсолютных движений и характеризуется тремя степенями свободы.
Рассмотрим вопрос о внешних возмущениях. Воздействие среды, в которой происходит движение, считаем неконтролируемым и предполагаем, что влияние ее на полет, предшествующий текущему моменту времени  , проявляется в реализующемся в этот момент векторе состояния. , проявляется в реализующемся в этот момент векторе состояния.
Рассматривая движение отдельного ЛА, надо заметить, что действие на объект внешних возмущений (например, ветровых) может привести к заметным искажениям траектории полета. Действие же внешних возмущений на относительное движение ЛА в группе заметного влияния не оказывает, так как для однотипных ЛА при малых рассогласованиях между ними возмущения почти одинаковы и при рассмотрении относительного движения как разности абсолютных движений взаимно исключаются.
Теперь непосредственно перейдем к рассмотрению математической модели относительного движения. Относительное движение ЛА будем рассматривать в общей постановке, когда оба аппарата могут совершать управляемый полет.
Введем некоторые определения. Вектором положения  называется вектор, проведенный из начала выбранной СК в точку мгновенного местоположения аппарата. Вектор и скорость его изменения называется вектор, проведенный из начала выбранной СК в точку мгновенного местоположения аппарата. Вектор и скорость его изменения  записываются в проекциях на оси выбранной (декартовой или сферической) СК. В первом случае вектор положения записываются в проекциях на оси выбранной (декартовой или сферической) СК. В первом случае вектор положения  определяется тремя его проекциями на оси декартовой СК, во втором двумя углами и расстоянием r от начала сферической СК до центра масс ЛА. Линией визирования будем называть прямую, соединяющую центры масс ведомого и ведущего ЛА. Вектором относительной дальности определяется тремя его проекциями на оси декартовой СК, во втором двумя углами и расстоянием r от начала сферической СК до центра масс ЛА. Линией визирования будем называть прямую, соединяющую центры масс ведомого и ведущего ЛА. Вектором относительной дальности  назовем вектор, который направлен от ведомого ЛА к ведущему вдоль линии визирования и по величине равен расстоянию между центрами масс этих ЛА. Это расстояние называется относительной дальностью назовем вектор, который направлен от ведомого ЛА к ведущему вдоль линии визирования и по величине равен расстоянию между центрами масс этих ЛА. Это расстояние называется относительной дальностью  . Скорость ведомого ЛА относительно ведущего называется относительной скоростью: . Скорость ведомого ЛА относительно ведущего называется относительной скоростью:  . Плоскостью относительного движения двух ЛА будем называть плоскость, в которой лежат вектора относительной дальности и относительной скорости в данный момент времени. Углами пеленга в работе будем считать два угла (для конкретности назовем их углами места и азимута рисунок 1), которые определяют ориентацию линии визирования в связанных с ведомым ЛА декартовых СК, вращающихся с угловой скоростью . Плоскостью относительного движения двух ЛА будем называть плоскость, в которой лежат вектора относительной дальности и относительной скорости в данный момент времени. Углами пеленга в работе будем считать два угла (для конкретности назовем их углами места и азимута рисунок 1), которые определяют ориентацию линии визирования в связанных с ведомым ЛА декартовых СК, вращающихся с угловой скоростью  относительно инерциального базиса. относительно инерциального базиса.
При рассмотрении относительного движения ЛА можно использовать различные СК. Каждая система имеет свои преимущества и недостатки. Выбор ее определяется конкретной задачей. Однако существуют и общие принципы выбора СК, которые обуславливают необходимость или желательность той или иной системы отсчета. Сюда относятся:
простота получаемых уравнений динамики, обеспечивающая простоту анализа задачи и интегрирования этих уравнений;
простота перехода от одной задачи к другой задаче исследуемого класса: математически ее можно выражать условиями, подобными приравниванию к нулю некоторых величин или функций;
простота технической реализации выбранной базовой СК на борту ЛА, определяющая простоту всей системы управления и в особенности ее измерительной части;
простота краевых условий.
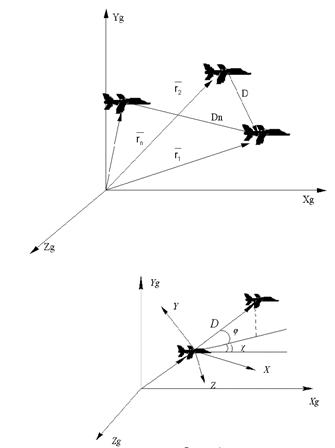
Рисунок 1
С точки 150 которая связана с ведомым ЛА. Начало СК целесообразно совместить с центром масс ведомого ЛА. Причем эта система может быть ориентирована по отношению к связанным осям ЛА различным образом. Во многом это обусловлено тем, что на ведомом ЛА находится измерительная аппаратура, определяющая параметры относительного движения ведомого и ведущего ЛА. Поэтому логично выбрать те варианты ориентации осей и те типы относительных СК, которые используются в качестве базовой системы отсчета при измерении координат относительного движения.
Определенную таким образом СК будем применять для задач управления движением группы ЛА как на прямолинейных участках маршрута, так и на криволинейных. В задаче сбора ЛА в группу целесообразно рассматривать относительное движение в СК, связанной с ведущим ЛА. На этапе сбора ведущий аппарат является пассивным (неманеврирующим), поскольку к его СУ предъявляются требования обеспечения прямолинейного полета.
При выводе уравнений относительного движения двух ЛА в группе будем использовать хорошо известные положения теоретической механики [4]. Используя выше приведенные определения, можно утверждать, что положение аппаратов определяется в каждый момент времени векторами  и и  в земной СК. Следовательно, вектора дальности и относительной скорости запишутся: в земной СК. Следовательно, вектора дальности и относительной скорости запишутся:
 , , |
(1) |
 . . |
(2) |
Векторное уравнение динамики относительного движения можно представить в виде
 , , |
(3) |
где  , ,  вектора ускорений ведущего и ведомого ЛА соответственно. вектора ускорений ведущего и ведомого ЛА соответственно.
Таким образом, относительное движение ЛА в пространстве представляется как движение двух материальных точек О1 и О2, совпадающих с центрами масс двух ЛА: ведущего и ведомого соответственно.
Далее будем описывать относительное движение ЛА в связанной СК ведомого ЛА ОXYZ, перемещающейся относительно инерциальной СК (рисунок 1). В этом случае переход от абсолютных производных векторов к локальным осуществляется по известным формулам:
 , , |
(4) |
 . . |
(5) |
Здесь точками обозначены производные векторов по времени в связанной СК, вращающейся относительно инерциальной с угловой скоростью  . Абсолютное движение ведущего ЛА в связанной СК ведомого ЛА будет определяться выражениями: . Абсолютное движение ведущего ЛА в связанной СК ведомого ЛА будет определяться выражениями:
 , , |
(6) |
 , , |
где  , ,  векторы ускорений соответственно ведомого ЛА, с которым связана СК, и ведущего ЛА, векторы ускорений соответственно ведомого ЛА, с которым связана СК, и ведущего ЛА,
 , ,  векторы скорости соответственно ведомого и ведущего ЛА, векторы скорости соответственно ведомого и ведущего ЛА,
 вектор углового ускорения ведомого ЛА. вектор углового ускорения ведомого ЛА.
Будем предполагать, что характер действующих на объект сил нам известен, т.е. известны законы изменения векторов скоростей и ускорений каждого ЛА. Задачу будем видеть в нахождении динамических и кинематических соотношений, определяющих изменение во времени параметров относительного движения.
Кинематические и динамические векторные уравнения относительного движения двух ЛА в связанной СК получим из (6):
 , , |
(7) |
 |
Для простоты будем считать, что СК ОXYZ совпадает с горизонтированной СК.
Рассмотрим сначала второе векторное уравнение.
Введем следующие обозначения:
Из второго векторного уравнения (7) получим динамические уравнения относительного движения двух ЛА в сферической СК, соответствующей горизонтированной:
Здесь составляющие относительного ускорения  , ,  , ,  рассчитываются в горизонтированной СК. рассчитываются в горизонтированной СК.
Рассмотрим теперь первое векторное уравнение (7). Введем обозначения:
Из первого уравнения (7) получим кинематические уравнения относительного движения двух ЛА.
Чтобы замкнуть систему уравнений относительного движения ЛА, к динамическим и кинематическим соотношениям необходимо добавить уравнения, определяющие величины  , ,  , ,  , , , в соответствующих СК. , , , в соответствующих СК.
При исследовании относительного движения ведущего и ведомого ЛА в горизонтированной СК ведомого ЛА можно записать соотношения для , , , , , в таком виде:
где индекс 1 относится к ведущему ЛА, а индекс 2 к ведомому.
3. Синтез алгоритмов обработки информации
Рассмотрим следующий вариант построения алгоритмов управления. Он связан с разработкой алгоритмов оценивания параметров движения ведущего
ЛА по результатам измерений относительного движения. Поскольку измерения содержат случайные ошибки, а алгоритм оценки должен быть эффективным в смысле их снижения и снижения влияния этих ошибок на точность получаемых оценок параметров
движения ведущего ЛА, то есть алгоритм обработки информации должен обеспечивать фильтрацию ошибок измерений и идентификацию параметров движения ведущего ЛА.
В общем случае алгоритм оценки и идентификации включает в себя блоки первичной и вторичной обработки измерительной информации. Ввиду того, что блок первичной обработки является составной частью измерительной системы и конструктивно с ней совмещен, то алгоритм первичной обработки информации здесь не рассматривается. Основное внимание при дальнейших исследованиях уделяется методам вторичной обработки информации по результатам первичных измерений.
Сначала рассмотрим общие вопросы идентификации моделей динамических систем. Задачу идентификации [5] или, другими словами, задачу оценивания параметров динамической системы можно сформулировать как задачу оценивания параметров модели системы, которая обладает существенными чертами проектируемой системы и представляет знания об этой системе в удобной форме. То есть целью идентификации не является абсолютно точное математическое описание физической реальности, а лишь создание модели, отражающей существенные для дальнейшего применения свойства системы. Положение существенно усложняется, если дополнительно с вектором параметров необходимо оценивать и вектор состояния. Здесь следует обратить
внимание на то, что идентификация параметров даже для линейных систем
приводит к нелинейным методам оценивания и идентификации.
В настоящее время опубликовано значительное число работ математического характера по оптимальной нелинейной фильтрации
. Наиболее общее решение проблемы нелинейной фильтрации получено
Р.Л.Стратоновичем в его работах по теории условных марковских процессов [6]. Как показано в работе [6], получение оптимальной нелинейной оценки сводится к решению функционального рекуррентного соотношения для апостериорной плотности вероятности. Основной особенностью задач нелинейной фильтрации является то, что реализация оптимальных алгоритмов обработки информации на современном уровне развития вычислительной техники не представляется возможной из-за сложности решения уравнений для апостериорной плотности вероятности, включающим многомерное интегрирование. Этот факт обусловил появление большого числа работ, посвященных разработке субоптимальных алгоритмов нелинейной фильтрации, основанных на различных аппроксимациях апостериорной плотности вероятности. Разработка субоптимальных алгоритмов диктуется также необходимостью реализации их в системах, работающих в реальном времени и удобством реализации на ЦВМ. С этой точки зрения предпочтительны рекуррентные методы, требующие запоминания на каждом такте сравнительно небольшого числа результатов вычислений.
Рассмотрим теперь конкретно задачу построения алгоритмов CMCН
ДПЛА с идентификатором в контуре управления. Имеется несколько вариантов синтеза. В этом случае задача сводится к отысканию расчетных соотношений для параметров  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  в предположении, что имеется информация о параметрах относительного движения в предположении, что имеется информация о параметрах относительного движения  , , , ,  , ,  , ,  , ,  , измеренных с помехами, и параметрах полета ведомого ЛА. Указанные параметры необходимы для реализации алгоритмов СМСН. , измеренных с помехами, и параметрах полета ведомого ЛА. Указанные параметры необходимы для реализации алгоритмов СМСН.
Рассмотрим относительное движение двух ЛА в пространстве. В этом случае изменение углов места и азимута, дальности, угловых скоростей линии визирования, радиальной скорости описывается в основной СК системой уравнений вида:
где  , ,  , ,  . .
Эта система может быть положена в основу синтеза алгоритмов нелинейной фильтрации для получения оценок , , , идентификации  , ,  , , , ,  , ,  , ,  . .
Для вычисления оценок параме
тров  , ,  , ,  , ,  , ,  , ,  , и т.д. необходимо определить математические ожидания этих функций на основе плотности распределения оценок , и т.д. необходимо определить математические ожидания этих функций на основе плотности распределения оценок  , ,  , ,  , ,  , ,  , ,  . Поскольку этот путь связан с громоздкими вычислениями многомерных интегралов, можно использовать более простой, но приближенный способ, согласно которому оценки перечисленных параметров вычисляются по определенным формулам, куда в качестве , , , , , входят их оценки. Используя информацию об этих оценках, можно определить значения относительных скоростей и ускорений в траекторной СК ведущего ЛА, сформировать программные значения. . Поскольку этот путь связан с громоздкими вычислениями многомерных интегралов, можно использовать более простой, но приближенный способ, согласно которому оценки перечисленных параметров вычисляются по определенным формулам, куда в качестве , , , , , входят их оценки. Используя информацию об этих оценках, можно определить значения относительных скоростей и ускорений в траекторной СК ведущего ЛА, сформировать программные значения.
Таким образом, основная задача состоит в определении оценок , , , , , . Конкретному рассмотрению алгоритмов оценивания и идентификации параметров относительного движения ЛА предпошлем краткое изложение некоторых общих принципов их построения.
Методически исследование по выбору
алгоритмов обработки информации в СМСН ДПЛА проводилось по следующей схеме Это, в первую очередь, касалось замены исходной нелинейной модели состояния и наблюдений тем или иным приближением и построение алгоритма оценивания на основе такой аппроксимации. Во-первых, для решения поставленной проблемы используется подход, основанный на дискретной аппроксимации динамической модели относительного движения. Это позволяет наиболее эффективно реализовать алгоритмы нелинейной фильтрации в БЦВМ, в основу которых положены дискретные методы оценивания. Во-вторых, нелинейные уравнения модели и наблюдений раскладываются в ряд Тейлора до членов первого порядка включительно относительно оценки на предыдущем шаге. В-третьих, в качестве математических моделей идентифицируемых параметров системы используются локальные модели, описывающие изменения параметров лишь в узком диапазоне изменения времени. Простейшей локальной моделью изменения параметров является следующая:
 , , |
(14) |
где  вектор параметров, время. вектор параметров, время.
Другая локальная модель изменения параметров может быть представлена в виде:
 , , |
(15) |
 , , |
где вектор  подлежит оценке наряду с вектором . В дискретном виде эти модели можно записать соответственно как подлежит оценке наряду с вектором . В дискретном виде эти модели можно записать соответственно как
 , , |
(16) |
и
 , , |
(17) |
 . . |
В принципе, значение степени полинома можно повысить, но это усложнение приводит ли
шь к незначительному увеличению точности
оценки.
В введении таких моделей состоит способ расширения вектора состояния, позволяющий получить принципиальное решение задачи совместной идентификации параметров и оценивания вектора состояния. Включая в число компонент расширенного вектора состояния  параметры вектора локальной модели (16)
, получим уравнения динамической системы двенадцатого порядка. параметры вектора локальной модели (16)
, получим уравнения динамической системы двенадцатого порядка.
Однако здесь возникает ряд проблем вычислительного порядка,
связанных с увеличением размерности задачи оценивания, что ведет к значительному увеличению объема вычислений, и как следствие - к неустойчивости машинных алгоритмов.
В таких условиях чрезвычайно важное, если не решающее, значение приобретает исследование возможностей сведения
исходной задачи совместной идентификации, имеющей большую размерность, к задачам меньшей размерности, т.е. возможностей декомпозиции задачи оценивания расширенного вектора состояния (сведение ее к задачам меньшей размерности).
Поэтому в данной работе в качестве одного из путей построения алгоритма оценивания в
СМСН
ДПЛА предлагается сначала провести идентификацию параметров  , ,  , ,  и оценить
параметры и оценить
параметры  , , , a затем, уже с учетом этой информации,
осуществить идентификацию параметров , , , , a затем, уже с учетом этой информации,
осуществить идентификацию параметров ,  , . В свете этих предложений идентификацию параметров целесообразно осуществлять в два этапа. Таким образом, идея этого метода интересна, так как позволяет существенно упростить алгоритмы обработки информации СМСН ДПЛА. Следуя намеченной схеме, решение задач
и нелинейной фильтрации при поиске оценок параметров относительного дв
ижения
ЛА ищется с помощью модифи
цированного нелинейного фильтра. , . В свете этих предложений идентификацию параметров целесообразно осуществлять в два этапа. Таким образом, идея этого метода интересна, так как позволяет существенно упростить алгоритмы обработки информации СМСН ДПЛА. Следуя намеченной схеме, решение задач
и нелинейной фильтрации при поиске оценок параметров относительного дв
ижения
ЛА ищется с помощью модифи
цированного нелинейного фильтра.
При решении практических задач идентификации возникает проблема обеспечения устойчивости процессов
обработки информации. В некоторых случаях реальные ошибки оценивания могут во много раз превосходить расчетные значения, характеризуемые матрицей ковариации ошибок оценивания. Наиболее часто встречающимся источником расходимости являются неточности моделей состояния и наблюдения, неточность задания характеристик шумов и т.д. Так как синтез алгоритмов обычно проводится в условиях априорной неопределенности, то для ее преодоления используют различные адаптивные
алгоритмы.
В данной работе с целью устранения в определенных пределах незнания о характеристиках шумов измерений используется идея
J-адаптивного фильтра
. Такое название он получил по первой букве фамилии автора “J” предложивший алгоритм J-адаптивного фильтра для дискретных систем в работе [7].
В работе [7] J-адаптивный фильтр использован для оценивания параметров движения баллистического объекта: положения и скорости, а также для оценивания вектора аэродинамических параметров (коэффициентов лобового сопротивления и под
ъемной силы) или составляющих вектора немоделируемых ускорений по осям декартовой
СК. Как указано в этой работе, J-
адаптивный фильтр идентифицирует 99% немоделируемых ускорений.
Пусть динамика системы описывается следующим нелинейным уравнением:
 |
(18) |
В дискретной форме это уравнение (с точностью до членов второго порядка) будет иметь вид [7]
:
 , , |
(19) |
где  вектор состояния размерности вектор состояния размерности
 , ,  непрерывная векторная функция, которая по крайней мере дважды дифференцируема по своим аргументам, непрерывная векторная функция, которая по крайней мере дважды дифференцируема по своим аргументам,
 , , |
(20) |
матрица Якоби вектор-функции  , a , a  отражает погрешность дискретизации и неопределенности моделирования в уравнении динамики. Предполагается, что отражает погрешность дискретизации и неопределенности моделирования в уравнении динамики. Предполагается, что  является белой гауссовской последовательностью с нулевым средним и матрицей ковариации является белой гауссовской последовательностью с нулевым средним и матрицей ковариации  : :
 , , |
(21) |
 |
где  дельта-функция Кронекера. дельта-функция Кронекера.
Начальное значение вектора состояния
 принимается
гауссовской
случа
йной переменной с известными средним значением и матрицей ковариации вида: принимается
гауссовской
случа
йной переменной с известными средним значением и матрицей ковариации вида:
 |
(22) |
Процесс измерения описывается уравнением:
 , , |
(23) |
 , , |
где  вектор погрешностей измерений типа белой последовательности с нулевым средним и матрицей ковариации вектор погрешностей измерений типа белой последовательности с нулевым средним и матрицей ковариации  , ,  вектор
размерности
вектор
размерности  , ,  непрерывная векторная функция, дважды дифференцируемая по своим аргументам. непрерывная векторная функция, дважды дифференцируемая по своим аргументам.
Тогда обобщенный калмановский фильтр описывается следующими
уравне
ниями:
 , , |
(24) |
 , , |
(25) |
где  весовая матрица (матрица коэффициентов усиления фильтра). весовая матрица (матрица коэффициентов усиления фильтра).
Уравнения экстраполяции матрицы ковариации:
 , , |
(26) |
 . . |
Уравнения коррекции матрицы ковариации:
 , , |
(27) |
 . . |
Далее на основе [8] рассмотрим метод получения
J-адаптивного нелинейного фильтра
.
Предполагается, что в уравнения состояния и измерений входят одни и те же определенные параметры, величины которых известны неточно. Такие параметры можно представить как случайны
е переменн
ые с заранее известной
статистикой  , ,  При этом предполагается, что При этом предполагается, что  , , , ,  , ,  некоррелированы, и матрица
ковариации некоррелированы, и матрица
ковариации  остается неизменной на всем временном интервале процесса оценивания. остается неизменной на всем временном интервале процесса оценивания.
При синтезе фильтра в вектор состояния  включается вектор . Вводя для вектора параметров уравнения вида включается вектор . Вводя для вектора параметров уравнения вида
| , |
(28) |
можно получить расширенную систему уравнений с вектором состояния:
 , , |
(29) |
и уравнениями измерений:
 . . |
(30) |
В этом случае динамические уравнения расширенной системы запишутся в виде
 , , |
(31) |
| . |
Применяя к этой системе нелинейный фильтр
можно получить оценки как вектора , так и вектора
 . .
Далее, используя метод изложенный в работе [9]
, легко получить уравнения J-
адаптивного фильтра. Уравнения
J-адаптивного фильтра
получаются [9] с помощью расширения вектора
состояния путем присоединения переменной
, записи расширенного фильтра в виде отдельных уравнений и отбрасывания уравнений для ковариационной матрицы .
В соответствии с этим методом матрица
ковариации ошибок оценивания представляется в виде:
 , , |
(32) |
где
 , , |
(33) |
 . . |
Матрицу  можно представить в виде можно представить в виде
 , , |
(35) |
 |
где
Окончательный вид уравнений J-адаптивного фильтра будет следующий:
Заключение
В данной работе решена задача оценки параметров относительного движения ЛА в групповом полете. Точное определение параметров , , , и особенно  , , , ,  , необходимо для синтеза алгоритма управления полетом ЛА в группе. , необходимо для синтеза алгоритма управления полетом ЛА в группе.
Задача была рассмотрена при полном составе измерений параметров относительного движения ЛА: углах визирования, угловой скорости линии визирования, дальности и скорости изменения дальности.
Ключевым вопросом в решении этой задачи стала разработка математической модели относительного движения ЛА.
Ввиду того, что измерения содержат случайные ошибки. алгоритм оценивания должен обеспечивать снижение ошибок и снижение их влияние точность оценки, а следовательно и на качество управления строем БЛА. Следовательно, в алгоритме было необходимо провести фильтрацию ошибок измерений.
Эта задача была решена посредством применения J-адаптивного фильтра.
Список литературы
Терентьев В.М. Разработка и исследование алгоритмов управления и обработки информации для СМСН БЛА. Доклад на школе-семинаре ЦАГИ по проблемам управления ЛА г. Жуковский 25.02-2.03 1991 г.
Тарасов В.Г. Межсамолетная навигация. М.: Машиностроение, 1980. 184 с.
Степанов О.А. Применение теории нелинейной фильтрации в задачах обработки навигационной информации. М. ЦНИИ "Электроприбор", 2000.
Горбатенко С.А., Макашов Э.М. и др. Механика полетов. Инженерный справочник. М.: Машиностроение, 1969, 420 с.
Эйкхоф П. Основы идентификации систем управления. М.: Мир, 1975.
Стратонович Р.Л. Условные марковские процессы и их применение к теории оптимального управления. М.: Издательство МГУ, 1966.
Вопросы управления космическими аппаратами. М.:Мир, 1975.
Jazwinski A.H., Stochastic processes and filtering theory, NY.: Academic Press, 1970.
Jazwinski A.H. Nonlinear and adaptive estimation in reentry, AIAA Paper No. 72-874.
|