МОСКОВСКАЯ ГОСУДАРСТВЕННАЯ ТЕХНОЛОГИЧЕСКАЯ АКАДЕМИЯ
Контрольная работа по дисциплине:
“Технологические средства автоматизации”
ВАРИАНТ 4
ВЫПОЛНИЛ: студент гр. № 141
А.С. Лизунов
ПРОВЕРИЛ: С.В. Санталов
Рязань 2003
Вопрос 5.
Современное производство характеризуется повышением доли автоматизированного оборудования. В связи с этим многие учебные дисциплины предусматривают изучение автоматических устройств дискретного действия, в частности наиболее распространенных устройств дискретной электроавтоматики (УДЭА).Существующие пакеты прикладных программ, обеспечивающие разработку УДЭА, не могут использоваться для обучения студентов, т.к. большинство операций проектирования в них выполняются автоматически.Устройства дискретной электроавтоматики, используются для формирования команд управления типа включено-выключено при наличии определенных комбинаций воздействий, заданных, например, в случае электрических устройств механическими воздействиями на их подвижные контакты.Анализ и синтез УДЭА проводится на основе булевой алгебры, что позволяет формализовать задачи и создать компьютерные программы проектирования и изучения работы таких устройств, а также оценивать уровень знаний на основе специальных контролирующих программ на персональных ЭВМ [1,2].Синтез устройства управления электромеханического типа осуществляется с помощью программы имитирующей работу этого устройства, которое моделируется в ячейках матрицы размера 4х4 установкой в них нормально замкнутых и разомкнутых электрических ключей, вертикальных и горизонтальных перемычек. После чего выдаются варианты замыкания полученной электрической схемы при различных воздействиях на ключи, а если число вариантов воздействий не превышает 16, то дополнительно и таблица истинности с указанием вариантов замыкания.Таким образом, синтез УДЭА проводится в несколько последовательных этапов: на первом - определяется булева формула соответствующая логике работы устройства, на втором - по этой формуле задается электрическая схема, на третьем - анализируется ее работа, причем второй и третий, наиболее трудоемкий, этапы выполняются с помощью компьютера и в случае нахождения ошибки в работе УДЭА могут повторяться не однократно.Вопрос 14.
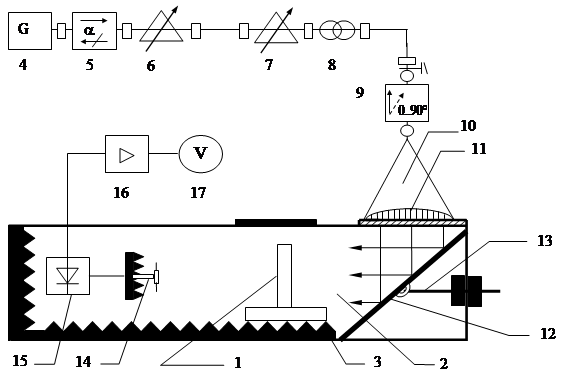
Индуктивные преобразователи линейных перемещений предназначены для преобразования линейных перемещений в электрические сигналы.
*Коэффициент преобразования: выходной сигнал преобразования при нагрузке 1кОм / смещение якоря преобразователя / напряжение питания.
**Нелинейность характеристики преобразования: наибольшее отклонение характеристики от прямой, проходящей через ноль и наименнее уклоняющейся от действительной, отнесенное к рабочему диапазону преобразователя.

***Размах показаний: разность между максимальным и минимальным показаниями при многократном арретировании преобразователя.
| Тип |
Общий ход шпинделя, мм |
Рабочий диапазон, мм |
Коэффициент преобразования*, мВ/мм/В |
Нелинейность характеристики преобразования,%** |
Размах показаний***, мкм |
Вариация показаний****, мкм |
| М-022 |
3,6 |
±1 |
130 |
0,5 |
0,2 |
0,2 |
| М-022А |
3,6 |
±1 |
130 |
0,1 |
0,2 |
0,2 |
| М-023 |
12,3 |
±5 |
50 |
5 |
0,2 |
0,2 |
| М-023А |
12,3 |
±5 |
50 |
0,5 |
0,2 |
0,2 |
| М-024 |
12,6 |
±3 |
80 |
5 |
0,2 |
0,2 |
| М-028 |
35 |
±15 |
30 |
10 |
1 |
1 |
| М-032 |
5 |
±2,5 |
20 |
5 |
5 |
5 |
| М-032-01 |
5 |
±0,5 |
100 |
3 |
5 |
5 |
****Вариация показаний: разность между двумя показаниями преобразователя при измерениях величины, имеющей одно и то же значение, с плавным медленным подходом к этому значению со стороны больших и меньших значений.
Вопрос 24.
Принцип действия такого датчика заключается в том, что при отражении электромагнитной волны от движущейся цели ее частота сдвигается на величину: f = 2F0·v/c , где F0 - частота электромагнитной волны, v - проекция скорости цели на направление цель-локатор, с - скорость света. Отсюда видно, что нужна очень высокая частота излучаемого сигнала, так как сдвиг частоты (то, что несет информацию о цели) пропорционален v/c и очень мал. Если v = 3 м/сек, то относительный сдвиг частоты всего 10-8 и при частоте излучения 10ГГц (1010 Гц) f = 200 Гц. Кроме того, только в СВЧ (сверхвысокочастотном) диапазоне можно создать компактные направленные антенны.
Локатор облучает цель непрерывным СВЧ сигналом. Отраженный целью сигнал возвращается обратно, принимается локатором и смешивается на смесителе с малой долей излучаемого сигнала. Смеситель - нелинейный электрический элемент (в простейшем случае обычный СВЧ диод). При одновременном взаимодействии двух электромагнитных колебаний с различными частотами f1 и f2 на нелинейном элементе выделяются колебания с комбинационными частотами
| fL
= f1
- f2
и
fH
= f1
+ f2
|
Обычно нижняя частота fL выделяется фильтром и используется для регистрации наличия движущегося объекта и (если нужно) для измерения его скорости.
Реклама

Фактически все такие датчики, это радиолокаторы СВЧ диапазона, которые работают на частотах от 10 до 40 ГГц (длина волны от 3 до 0.8 см). Датчики такого типа используются:
- для определения скорости самолетов,
- измерения скорости автомобилей. Ряд марок автомобилей имеет в качестве спидометра доплеровский радиолокационный датчик скорости. Датчик работает на длине волны 8мм, расположен под сидением водителя и облучает дорогу через радиопрозрачное окно.
- контроль скорости автомобиля (датчики, которые использует ГАИ),
- охранные датчики (регистрация движущихся объектов в помещении).
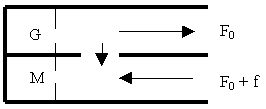
Простейший датчик движения представляет собой два куска волновода (скажем 23 x 10), сложенные вдоль узкой стенки. С одной стороны волноводы закорочены, и с помощью диафрагм в них организованы резонаторы, настроенные на частоту F0. СВЧ мощность излучается (попадает) в резонаторы через отверстие связи в диафрагме. В одном резонаторе помещен диод Ганна (G) (или лавинно пролетный диод - ЛПД). При подаче определенного напряжения на диод такая система начинает генерировать СВЧ колебания на частоте F0. Во втором резонаторе размещен смесительный диод (M) - это приемник. Часть мощности излучаемого сигнала через отверстие связи в общей узкой стенке волновода проникает в волновод приемника и далее в резонатор смесителя. Эта мощность смешивается с сигналом, отраженным целью на диоде-смесителе. В результате на диоде возникает низкочастотный сигнал с разностной частотой. Этот сигнал используется для измерения скорости цели (измеряется частота fL). Если требуется только регистрация наличия движущегося объекта, то просто анализируется, есть ли в напряжении на диоде переменная часть с амплитудой выше некоторого порога. Система на двух волноводах (без рупорной антенны) имеет чувствительность в конусе с раскрытием порядка 70 градусов (вдоль оси волноводов).
Вопрос 34.
.
Операционным усилителем называется электронная схема, имеющая большой коэффициент усиления и два входа - инвертирующий и неинвертирующий. Операционные усилители могут использоваться в аналоговых вычислительных машинах для выполнения различных операций (сложение, вычитание, умножение, дифференцирование, интегрирование). Каждая конкретная операция, выполняемая операционным усилителем, определяется его схемой включения и подключёнными к нему дискретными элементами.
Основными характеристиками операционного усилителя являются его коэффициент усиления по постоянному току, скорость нарастания выходного напряжения, которая определяет его быстродействие, диапазон рабочих частот и т.д. Обычно операционные усилители имеют широкий диапазон рабочих частот (от нуля - постоянное напряжение - до нескольких мегагерц). Коэффициент усиления операционных усилителей варьируется в пределах от нескольких тысяч до нескольких миллионов.
Реклама

Основной особенностью операционного усилителя является то, что он усиливает разностное напряжение, т.е. разность напряжений на его неинвертирующем и инвертирующем входе. Таким образом, передаточная функция операционного усилителя может записываться в упрощённой форме в виде:

где K - коэффициент усиления по постоянному току операционного усилителя, x1 - напряжение на неинвертирующем входе, x2 - напряжение на инвертирующем входе, Umax - максимальное значение выходного напряжения.
Таким образом, если разность входных напряжений по модулю будет превышать Umax/K, то транзисторы усилительных схем операционного усилителя войдут в состояние насыщения и на выходе установится значение Umax. Знак Umax соответствует знаку разности входных напряжений.
Операционный усилитель (ОУ) может использоваться не только для выполнения математических операций, но и в качестве усилителя в аудиоаппаратуре. При этом для обеспечения необходимого коэффициента усиления требуется ввести цепь отрицательной обратной связи, которая снижает коэффициент усиления и увеличивает стабильность работы схемы. Глубина отрицательной обратной связи регулируется в зависимости от требуемого коэффициента усиления.
Идеальный ОУ должен обеспечивать отсутствие наклона и прямолинейность амплитудно-частотной характеристике в рабочем диапазоне частот, а также бесконечный коэффициент усиления. Иногда для выравнивания АЧХ в некоторой области частот к специальным выводам ОУ подключается корректирующая ёмкость.
ОУ функционально состоит из дифференциального усилителя и усилителя мощности. Дифференциальный усилитель собственно и обеспечивает формирование разностного сигнала и его усиление. Усиление по мощности и согласование выхода дифференциального усилителя с цепями, подключёнными к выходу ОУ обеспечивается усилителем мощности. Дифференциальный усилитель собран по симметричной мостовой схеме, состоящей из двух или четырёх транзисторов, не считая транзисторов стабилизатора тока, подключённого к коллекторным или эмиттерным (в зависимости от типа проводимости транзисторов) цепям транзисторов. Дифференциальный усилитель имеет два входа, подключённых соответственно к неинвертирующему и инвертирующему входу ОУ. Нагрузочная способность, максимальный выходной ток и максимальное выходное напряжение зависят от параметров усилителя мощности. В частности, максимальное выходное напряжение также зависит от напряжения питания ОУ. Напряжение питания ОУ обычно выбирается двуполярным. Это определяется наличием дифференциального усилителя и принципом работы электрического моста.
ОУ обычно выполняется в виде интегральной схемы.
Рассмотрим теперь работу аналогового компаратора напряжения, построенного на схеме с ОУ. Отличием компаратора от ОУ среди прочих является то, что выходной сигнал компаратора - цифровой, в то время как выходной сигнал ОУ - аналоговый. Преобразование аналогового сигнала ОУ в схеме компаратора может осуществляться соответствующим преобразователем уровня для некоторого типа логики или диодным ограничителем.
Пусть имеются два напряжения - сравниваемое и образцовое. Сравниваемое напряжение подано на неинвертирующий вход компаратора, а образцовое - на инвертирующий. Требуется, чтобы при равенстве этих напряжений на выходе компаратора появилась логическая 1. Пусть сравниваемое и образцовое напряжения не равны. Тогда разность этих напряжений будет не равна нулю. При этом на выходе ОУ компаратора будет усиленная по напряжению разность входных напряжений. Заметим, что можно всегда подобрать коэффициент усиления ОУ компаратора с таким расчётом, что даже малая разность входных напряжений будет давать Umax на выходе ОУ. Пусть также на выходе ОУ стоит некоторая схема, которая на выходе формирует напряжение по модулю равное выходному напряжению ОУ. Этой схемой может являться диодный выпрямитель напряжения. Таким образом, если входные сравниваемое и образцовое напряжения хоть немного отличаются, на выходе схемы выпрямителя будет Umax, а если они точно равны, то на выходе выпрямителя будет 0. Если теперь пропустить это напряжение через преобразователь уровня и проинвертировать, то получим требуемый результат сравнения. Заметим также, что коэффициент усиления ОУ компаратора определяет ширину импульса с амплитудой логической 1 на выходе компаратора при постоянной скорости изменения сравниваемого напряжения. Так как скорость сравниваемого напряжения может изменяться, то и ширина выходного импульса компаратора может изменяться при постоянном коэффициенте усиления ОУ. Для устранения этого эффекта на выходе компаратора может также ставиться формирователь импульсов определённой длительности при любой длительности входного импульса. Такой формирователь можно собрать на триггере Шмитта или блокинг-генераторе.
Если требуется, чтобы компаратор выдавал 1 при преобладании сравниваемого напряжения над образцовым, схема выпрямителя на выходе ОУ преобразуется для пропускания только положительного напряжения, а формирователь на выходе ОУ заменяется триггером, который устанавливается в 1 при равенстве входных напряжений и сбрасывается, если напряжение на выходе ОУ отрицательно.
Цифроаналоговый преобразователь (ЦАП) используется для преобразования цифрового кода в аналоговое напряжение и используется не только в качестве независимого элемента, но и входит в состав АЦП.
Принцип работы ЦАП основан на том, что единице в каждом разряде входного кода ставится в соответствие некоторое напряжение, которое добавляется к выходному и имеет значение, пропорциональное весу разряда. Таким образом, выходное напряжение пропорционально двоичному числу, определяемому входным кодом. Обычно, ЦАП поддерживает выходное напряжение на том же уровне до прихода команды записи. Это обеспечивается введением в ЦАП триггеров. Если запись в ЦАП разрешена, то триггеры устанавливаются в значения, соответствующие значениям разрядов входного кода. Если запись в ЦАП запрещена, то триггеры находятся в состоянии хранения и выходное напряжение ЦАП остаётся на том же уровне.
Обычно, ЦАП собирается на резисторной матрице, управляемой электронными ключами. Электронные ключи обеспечивают подключение резисторов матрицы к положительному или отрицательному потенциалу источника питания. Электронные ключи должны иметь малое сопротивление в открытом состоянии и очень большое сопротивление в закрытом. Это требование обеспечивается применением полевых МОП транзисторов с изолированным затвором.
Существует по крайней мере две схемы построения ЦАП. ЦАП с прецизионными резисторами имеет резисторы с сопротивлением, обратно пропорциональным весам разрядов входного кода. При этом каждый такой резистор подключён к соответствующему электронному ключу. Если в соответствующем разряде входного кода находится 1, ключ подключает резистор к положительному потенциалу источника питания, обеспечивая добавление к выходному напряжению АЦП напряжения, пропорционального весу данного разряда входного кода. Если в соответствующем разряде входного кода записан 0, то резистор отключается от положительного потенциала источника питания, не оказывая влияния на выходное напряжение ЦАП. Недостатком подобного ЦАП является то, что резисторы, входящие в его состав должны иметь очень высокую точность значения сопротивления, которое не должно изменяться при изменении температуры. Если это не так, то линейность преобразования ЦАП нарушается и может зависеть от температуры и других факторов.
Во втором типе ЦАП все резисторы имеют одинаковое сопротивление или разделены на две группы, сопротивления резисторов в каждой группе одинаково и отличается от другой группы в два раза. В цепи резисторов может использоваться то свойство, что два резистора с одинаковым сопротивлением, включённых параллельно, имеют общее сопротивление, равное половине сопротивления каждого. В настоящее время ЦАП первого типа практически не используются.
Вопрос 44.
Для схем с очень высокими напряжениями и очень большими токами созданы полупроводниковые приборы, называемые тиристорами. Один тиристор может работать при напряжениях до 4000 В и токах до 4000 А. В преобразователях тиристоры соединяют в каскады, рассчитанные на четверть миллиона вольт и более.
Тиристор состоит из двух транзисторов (npn и pnp), расположенных так, что коллектор pnp-части тиристора является базой npn-части, а коллектор npn-части – базой pnp-части. Если инжектировать небольшой ток в базу npn-части, то он создаст для эмиттера прямое смещение, и возникнет ток эмиттера. Этот ток, собранный коллектором npn-части, становится током базы pnp-части, который вызывает появление тока эмиттера этой части. Такой процесс будет повторяться до тех пор, пока вокруг общего коллекторного перехода не соберется заряд, достаточный для нейтрализации связанного заряда, и тогда напряжение на нем понизится до уровня ~0,7 В, соответствующего насыщению. Так происходит «включение» тиристора. «Выключается» же он при понижении тока ниже некоторого порогового уровня, называемого удерживающим током. Если сделать площадь эмиттера достаточно большой, то легко можно переключать колоссальные токи.
Тиристоры пропускают ток только в одном периоде переменного тока; лишь с изобретением симистора появился настоящий полупроводниковый переключатель переменного тока для регуляторов электродвигателей, регуляторов освещенности и других устройств. Симистор состоит из двух выполненных на одной кремниевой пластинке тиристоров, включенных параллельно, но противоположно. Один из тиристоров пропускает ток в одном полупериоде, а другой – в следующем. Для включения симистора предусматривается управляющий электрод. Чтобы выключить его, нужно прервать ток. Интересной особенностью симисторов является то, что они проводят ток любого направления и могут переключаться либо положительным, либо отрицательным управляющим сигналом
Вопрос 54.
Данный тип реле применяется для коммутация нагрузок в цепях постоянного и переменного тока; для работы в цепях переменного тока с постоянным смещением; в импульсных источники питания; в устройствах автоматического регулирования и управления.
Твердотельные оптоэлектронные реле с МОП - транзисторами на выходе являются альтернативой электромеханическим и полупроводниковым реле на основе тиристоров.
Прибор состоит из инфракрасного светодиода, оптически связанного с матрицей фотодиодов, которые работают в фотовольтрическом режиме и управляют выходным коммутирующим элементом, последний представляет собой пару МОП - транзисторов, соединенных истоками. При включении МОП - транзисторов в последовательную цепь получается линейный переключатель постоянного и переменного тока двунаправленного действия.
| Основные характеристики
|
| малый ток управления - 10 : 30 мА
наработка на отказ - 25 000 часов
коммутирование нагрузок в цепях постоянного и переменного тока;
совместимость с ТТЛ / ТТЛШ, КМОП
низкое сопротивление в открытом состоянии
малые утечки в закрытом состоянии - менее 100 мА
возможность коммутации малых токов - ~ 1мкА
высоковольтная монолитная схема Uиз. - не менее 1500 В / не менее 4000 В
диапазон рабочих температур -
|
Вопрос 64.
На рис. 1,а показан виток провода abcd, вращающийся по часовой стрелке вокруг оси 00 в магнитном поле между северным (N) и южным (S) полюсами магнита. Направление мгновенной наведенной ЭДС показано стрелками ab и cd; величина и знак ЭДС для положений 1, 2, 3 и 4 приведены на графике рис. 1,б. Когда плоскость витка перпендикулярна полю (положения 1 и 3), ЭДС равна нулю; когда же плоскость витка параллельна полю (положения 2 и 4), ЭДС максимальна. Кроме того, направление ЭДС в боковых частях витка (скажем, ab), когда они проходят мимо северного полюса, противоположно ее направлению при прохождении мимо южного полюса. Поэтому ЭДС меняет знак через каждую половину оборота в точках 1 и 3, так что в витке генерируется переменная ЭДС и, стало быть, течет переменный ток. Если предусмотреть в конструкции токособирательные (контактные) кольца, то переменный ток пойдет во внешнюю цепь.
   
Конструкция.
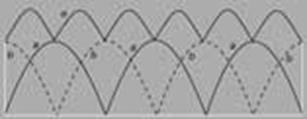
Генератор постоянного тока должен давать ток, который всегда течет в одном направлении. Для этого нужно переключать контакты внешней цепи в тот момент, когда ЭДС падает до нуля, прежде чем она начнет нарастать в другом направлении. Это делается с помощью коллектора, схематически изображенного на рис. 1,в. В показанном простейшем случае он представляет собой кольцо, разрезанное на две части по диаметру. Один конец витка присоединен к одному из полуколец, другой – к другому. Щетки расположены так, что они перекрывают зазоры между полукольцами, когда плоскость витка перпендикулярна магнитному полю (в положениях 1 и 3) и ЭДС равна нулю. Как явствует из рисунка, каждый раз, когда ЭДС меняет знак, переключаются концы внешней цепи, так что ток в ней течет всегда в одном направлении (рис. 1,г). Если к витку, показанному на рис. 1,в, добавить еще один, перпендикулярный ему, то его ЭДС будет соответствовать кривой bb, сдвинутой относительно первоначальной на 90 (рис. 2). Полная ЭДС будет соответствовать сумме двух кривых, т.е. значительно более гладкой кривой e. На практике используется большое число витков и коллекторных сегментов (рис. 3), так что пульсации ЭДС незаметны.
Вопрос 74.
Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. А. у. широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления.
Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, контроль, наладка и т.д.) также могут быть автоматизированы. САУ функционирует в основном в составе производственного или какого-либо другого комплекса.
САУ классифицируются в основном по цели управления, типу контура управления и способу передачи сигналов. Первоначально перед САУ ставились задачи поддержания определённых законов изменения во времени управляемых величин. В этом классе систем различают системы автоматического регулирования (CAP), в задачу которых входит сохранение постоянными значения управляемой величины; системы программного управления, где управляемая величина изменяется по заданной программе; следящие системы, для которых программа управления заранее неизвестна. В дальнейшем цель управления стала связываться непосредственно с определёнными комплексными показателями качества, характеризующими систему (её производительность, точность воспроизведения и т.п.); к показателю качества могут предъявляться требования достижения им предельных (наибольших или наименьших) значений, для чего были разработаны адаптивные, или самоприспосабливающиеся системы. Последние различаются по способу управления: в самонастраивающихся системах меняются параметры устройства управления, пока не будут достигнуты оптимальные или близкие к оптимальным значения управляемых величин; в самоорганизующихся системах с той же целью может меняться и её структура. Наиболее широки, в принципе, возможности самообучающихся систем, улучшающих алгоритмы своего функционирования на основе анализа опыта управления. Отыскание оптимального режима в адаптивных САУ может осуществляться как с помощью автоматического поиска, так и беспоисковым образом.
Способ компенсации возмущений связан с типом контура управления системы. В разомкнутых САУ на УУ не поступают сигналы, несущие информацию о текущем состоянии управляемого объекта, либо в них измеряются и компенсируются главные из возмущений, либо управление ведётся по жёсткой программе, без анализа каких-либо факторов в процессе работы. Основной тип САУ — замкнутые, в которых осуществляется регулирование по отклонению, а цепь прохождения сигналов образует замкнутый контур, включающий объект управления и УУ; отклонения управляемой величины от желаемых значений компенсируются воздействием через обратную связь, вне зависимости от причин, вызвавших эти отклонения. Объединение принципов управления по отклонению и по возмущению приводит к комбинированным системам. Часто, помимо основного контура управления, замыкаемого главной обратной связью, в САУ имеются вспомогательные контуры (многоконтурные системы) для стабилизации и коррекции динамических свойств. Одновременное управление несколькими величинами, влияющими друг на друга, осуществляется в системах многосвязного управления или регулирования.
По форме представления сигналов различают дискретные и непрерывные САУ. В первых сигналы, по крайней мере в одной точке цепи прохождения, квантуются по времени, либо по уровню, либо как по уровню, так и по времени.
Простейший пример САУ — система прямого регулирования частоты вращения двигателя (рис. 1).
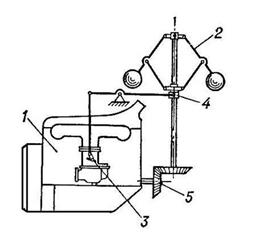
Рис. 1 Автоматическое управление
Цель управления — поддержание постоянной частоты вращения маховика, управляемый объект — двигатель 1; управляющее воздействие — положение регулирующей заслонки дросселя 3; УУ — центробежный регулятор 2, муфта 4 которого смещается под действием центробежных сил при отклонении от заданного значения частоты вращения вала 5, жестко связанного с маховиком. При смещении муфты изменяется положение заслонки дросселя. Структурная схема рассмотренного примера (рис. 2) типична для многих САУ вне зависимости от их физической природы. Описанная система представляет собой замкнутую одноконтурную непрерывную систему автоматического регулирования механического действия, допускающую линеаризацию при исследовании.
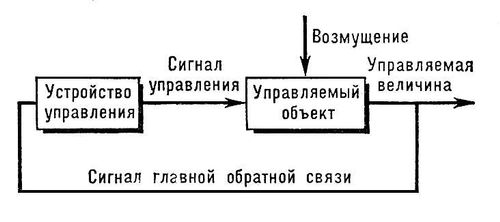
Рис. 2 Автоматическое управление
Промышленность выпускает универсальные регуляторы, в том числе с воздействием по производной, по интегралу, экстремальные регуляторы, для управления различными объектами. Специализированные САУ широко применяются в различных областях техники, например: следящая система управления копировально-фрезерным станком по жёсткому копиру; САУ металлорежущих станков с программным управлением от магнитной ленты, перфоленты или перфокарты (преимущества такого управления заключаются в относительной универсальности, лёгкости перестройки программы и высокой точности обработки деталей); система программного управления реверсивным прокатным станом, включающая в свой контур управляющую вычислительную машину. В относительно медленных технологических процессах в химической и нефтяной промышленности распространены многосвязные САУ, осуществляющие регулирование большого количества связанных величин; так, при перегонке нефти информация о температуре, давлении, расходе и составе нефтепродуктов, получаемая от нескольких сотен датчиков, используется для формирования сигналов управления десятками различных регуляторов. САУ играют важную роль в авиации и космонавтике, например автопилот представляет собой САУ связанного регулирования, а иногда и самонастраивающуюся систему. В военной технике применяются высокоточные следящие системы, часто включающие вычислительные устройства (например, система углового сопровождения радиолокационной станции). При анализе многих физиологических процессов в живом организме, таких как кровообращение, регуляция температуры тела у теплокровных животных, двигательные операции, обнаруживаются характерные черты САУ.
Вопрос 84.
Регулирование автоматическое (от нем. regulieren - регулировать, от лат. regula - норма, правило), поддержание постоянства (стабилизация) некоторой регулируемой величины, характеризующей технический процесс, либо её изменение по заданному закону (программное регулирование) или в соответствии с некоторым измеряемым внешним процессом (следящее регулирование), осуществляемое приложением управляющего воздействия к регулирующему органу объекта регулирования; разновидность автоматического управления. При Р. а. управляющее воздействие u(t) обычно является функцией динамической ошибки - отклонения e(t) регулируемой величины х(t) от её заданного значения x0(t):e(t)= x0(t) - х(t) (принцип Ползунова - Уатта регулирования по отклонению, или принцип обратной связи) (рис., а). Иногда к Р. а. относят также управление, при котором u(t) вырабатывается (устройством компенсации) в функции возмущающего воздействия f (нагрузки) на объект (принцип Понселе регулирования по возмущению) (рис., б), и комбинированное регулирование по отклонению и возмущению (рис., б).
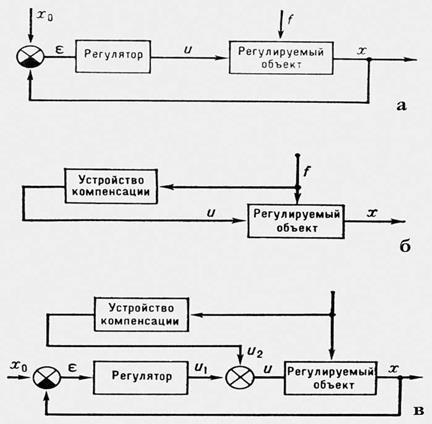
Для осуществления Р. а. к. объекту подключается комплекс устройств, представляющих собой в совокупности регулятор. Объект и регулятор образуют систему автоматического регулирования (CAP). САР по отклонению является замкнутой,по возмущению - разомкнутой. Математическое выражение функциональной зависимости желаемого (требуемого) управляющего воздействия u0(t) от измеряемых регулятором величин называется законом, или алгоритмом, регулирования. Наиболее часто применяемые законы Р. а.: П - пропорциональный (статический), u0 = ke, И - интегральный (астатический),;
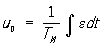 ПИ - пропорционально-интегральный (изодромный), ПИ - пропорционально-интегральный (изодромный), 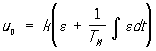 , ПИД - пропорционально-интегральный с производной, , ПИД - пропорционально-интегральный с производной,
 ; здесь k - коэффициет усиления регулятора, Ти и Тд - постоянные времени интегрирования и дифференцирования. Фактическое воздействие u(t) отличается от u0(t)вследствие инерционности регулятора. CAP является динамической системой,процессы в которой описываются дифференциальными, дифференциально-разностными и т. п. уравнениями. ; здесь k - коэффициет усиления регулятора, Ти и Тд - постоянные времени интегрирования и дифференцирования. Фактическое воздействие u(t) отличается от u0(t)вследствие инерционности регулятора. CAP является динамической системой,процессы в которой описываются дифференциальными, дифференциально-разностными и т. п. уравнениями.
САР может находиться в состоянии равновесия, в ней могут протекать установившиеся и переходные процессы, количественные характеристики которых изучает теория автоматического регулирования (ТАР). В статических системах регулирования установившаяся погрешность (ошибка ) eст при постоянной нагрузке (на объект) зависит от величины последней. Для повышения статической точности увеличивают коэффициент усиления регулятора k,но при достижении им некоторого критического значения kkp система обычно теряет устойчивость. Введение в регулятор интегрирующих элементов позволяет получить астатическую систему регулирования, в которой при любой постоянной нагрузке статическая ошибка отсутствует. ТАР изучает условия устойчивости, показатели качества процесса регулирования (динамическую и статическую точность, время регулирования, колебательность системы, степень и запасы устойчивости и т. п.) и методы синтеза CAP, т. е. определения структуры и параметров корректирующих устройств, вводимых в регулятор для повышения устойчивости и обеспечения требуемых показателей качества Р. а.
Наиболее полно разработана ТАР линейных систем, в которой применяются аналитические и частотные методы исследования. Малые отклонения от равновесных состояний в непрерывных нелинейных системах Р. а. исследуются посредством линеаризации исходных уравнений. Процессы при больших отклонениях и специфических особенности; нелинейных CAP (предельные циклы, автоколебания, захватывание, скользящие режимы и т. п.) изучаются методами фазового пространства. Для изучения периодических режимов также применяют приближённые методы малого параметра, гармония, баланса и др. Устойчивость при больших отклонениях исследуется вторым (прямым) методом Ляпунова и методом абсолютной устойчивости, разработанным: В.М. Поповым (Румыния).
Особое место в ТАР занимают дискретные системы Р.а., в которых осуществляется квантование сигнала. Из них наиболее изучены импульсные системы (с квантованием по времени), релейные системы (с квантованием по уровню) и цифровые системы (с квантованием по времени и уровню). Частный вид релейных систем - двухпозиционные регуляторы, в которых регулирующий орган может занимать лишь одно из двух крайних положений.
Вопрос 94.
Управля
ющая машина, управляющая вычислительная машина (УВМ), вычислительная машина, включенная в контур управления техническими объектами (процессами, машинами, системами). УВМ принимают и обрабатывают информацию, поступающую в процессе управления, и выдают управляющую информацию либо в виде текста, таблицы, графика, отпечатанных на бумаге или отображаемых на экране дисплея, либо в виде сигналов (воздействий), подаваемых на исполнительные органы объекта управления (см. рис.). Главная цель применения УВМ – обеспечение оптимальной работы объекта управления. Управление с помощью УВМ строится на основе математического описания поведения объектов. Отличительная особенность УВМ – наличие в них наряду с основными устройствами, входящими в состав всех ЭВМ (процессором, памятью и др.), комплекса устройств связи с объектом. К этому комплексу относятся устройства, осуществляющие ввод в процессор данных (получаемых от датчиков величин, характеризующих состояние управляемого объекта), устройства, обеспечивающие выдачу управляющих воздействий на исполнительные органы, а также различные преобразователи сигналов, устройства отображения информации.
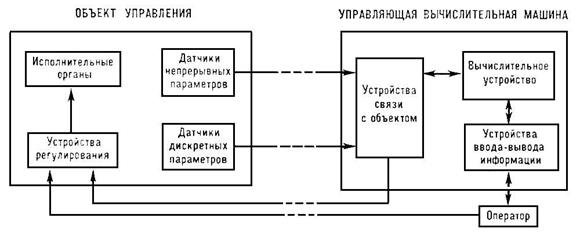
Различают УВМ универсальные (общего назначения) и специализированные. К специализированным относятся УВМ, ориентированные на решение задач в системах, управляющих заранее определённым небольшим набором объектов (процессов). К универсальным относят УВМ, которые по своим техническим параметрам и возможностям могут быть использованы практически в любой системе управления. По способу представления информации УВМ делят на цифровые, аналоговые и гибридные – цифро-аналоговые. Цифровые УВМ превосходят аналоговые по точности управления, но уступают им в быстродействии. В гибридных УВМ цифровые и аналоговые вычислительные устройства работают совместно, что позволяет в максимально степени использовать их достоинства.
УВМ является центральным звеном в системах автоматического управления (САУ). Она осуществляет обработку информации о текущих значениях физических величин, характеризующих объект, и об их изменении, а также вырабатывает управляющие сигналы, обеспечивающие заданные режимы его работы. В автоматизированных системах управления (АСУ) технологическими процессами УВМ обычно работает в режиме советчика, выдавая оператору сведения о состоянии объекта управления и рекомендации по оптимизации процесса управления, или (реже) в режиме непосредственного управления. По назначению и области использования УВМ подразделяются на промышленные, аэрокосмические, транспортные и др.
Появление УВМ связано с разработкой бортовых вычислительный машин для военной авиации в начале 50-х гг. Так, например, одна из первых бортовых УВМ – «Диджитак» (США, 1952) предназначалась для автоматического управления полётом и посадкой самолёта, для решения задач навигации и бомбометания. В ней использовалось около 260 субминиатюрных электронных ламп и 1300 полупроводниковых диодов. УВМ занимала объём 150 дм3 при массе 150 кг. В середине 50-х гг. были разработаны первые бортовые УВМ на транзисторах, а в начале 60-х гг. – первые бортовые УВМ на интегральных микросхемах, в том числе несколько моделей со сравнительно высокими вычислительными возможностями. Примером такой УВМ может служить «УНИВАК-1824» (США, 1963), состоящая из арифметико-логического устройства, запоминающего устройства, блока ввода-вывода данных и блока питания; объём, занимаемый УВМ, 4,1 дм3, масса 7 кг, потребляемая мощность 53 вт (при этом не требовалась система охлаждения или вентиляции); эта УВМ собрана на 1243 интегральных микросхемах. В начале 60-х гг. УВМ применяли в системах управления непрерывными технологическими процессами (пример – УВМ RW-300, США, включенная в контур управления технологическими процессами производства аммиака). В такой системе управления воздействия, вырабатываемые УВМ, преобразовывались из цифровой формы в аналоговую и в виде электрических сигналов поступали на регуляторы исполнительных механизмов. Непосредственное цифровое управление непрерывным технологическим процессом впервые было применено в 1962 в СССР (в системе управления «Автооператор» на Лисичанском химкомбинате) и в Великобритании (в системе управления «Аргус-221» на содовом заводе в г.Флитвуд). Для управления непрерывными технологическими процессами в СССР в 60-х гг. были разработаны вычислительные машины «Днепр», «Днепр-2», ВНИИЭМ-1, ВНИИЭМ-3, УМ-1-НХ и др.
В середине 60-х гг. появилась тенденция к переходу от выпуска единичных моделей УВМ к выпуску управляющих вычислительных комплексов (УВК), которые строятся по агрегатному принципу. УВК представляет собой набор вычислительных средств, средств связи с объектом и оператором, внутренней и внешней связи. Пример УВК – комплекс М-6000, входящий в агрегатированную систему средств вычислительной техники (АСВТ), разработанную в СССР (серийный выпуск с 1969). Конструктивно ЛСВТ представляет собой набор модулей, из которых компонуют различные по структуре и назначению УВК. В основном это комплексы для сбора и первичной обработки информации при управлении различными технологич. процессами, научными экспериментами и т.п. УВК М-6000 состоит из универсального цифрового процессора, устройств ввода-вывода данных, агрегатных модулей сбора и выдачи аналоговой и дискретной информации, агрегатных модулей для организации внутренней связи и связи с др. комплексами. На базе <АСВТ создаются многоуровневые АСУ промышленным предприятием. На нижнем уровне такой системы используются относительно простые УВМ (например, микропрограммный автомат М-6010 и машина централизованного контроля М-40), выполняющие функции непосредственного управления технологическим процессом. На среднем уровне при помощи УВК (например, УВК М-6000 и М-400) решаются более сложные задачи управления, связанные с оптимизацией группы технологических процессов. Эти УВК, в свою очередь, имеют связь с центральным звеном системы, которое решает задачи управления работой всей системы в целом, в том числе задачи учёта и планирования производства. На этом уровне обычно используются большие УВК (например, М-4030 и М-7000).
Одно из направлений развития УВМ – их агрегатирование на основе функциональных модулей, отвечающих требованиям единства входных и выходных параметров, стандартных информационных связей между модулями и унифицированного математического обеспечения. При этом появляется реальная возможность компоновки (по заказу пользователя) вычислительной системы нужной структуры. Пример – вычислительная система Хьюлетт-Паккард-9600 (США), предназначенная для различных измерений и автоматического регулирования, которая уже частично реализует это направление развития УВМ. Основа этой системы – функциональный унифицированный модуль, представляющий собой микропрограммный процессор, агрегатируемый с другими функциональными модулями. Для централизованного автоматического управления группами территориально разобщённых объектов используют т. н. распределённые системы управления, которые включают центр обработки данных, оснащенный высокопроизводительными ЭВМ, центральные и периферийные системы управления, объединённые унифицированными системами связи. Использование в центре обработки данных высокопроизводительной ЭВМ позволяет обрабатывать информацию, поступающую от центральных систем управления (которые работают в реальном масштабе времени), а также осуществлять дистанционный ввод задач в центральные системы управления. Последние связаны с центром обработки данных и с периферийными системами, осуществляющими непосредственное управление объектами.
Большое внимание при создании современных УВМ уделяется повышению надёжности их функционирования при одновременном снижении стоимости, массы и габаритов, а также повышению надёжности средств получения информации, её преобразования и выдачи.
|
