Содержание
Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Задание . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1 Расчет геометрических параметров . . . . . . . . . . . . . . 7
2 Проверочный расчет червячной пары на прочность 8
3 Расчет вала червяка (Построение эпюр) . . . . . . . . . . 10
4 Выбор подшипников . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5 Расчет шкалы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
6 Расчет редуктора на точность . . . . . . . . . . . . . . . . . . . 15
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Приложение 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Приложение 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Введение
Механизм поворота и отсчета аттенюатора.
Прибор предназначен для уменьшения мощности сигнала в известное число раз. Аттенюатор характеризуется вносимым в тракт затуханием, т.е. отношением мощностей на входе и выходе.

Рисунок 1
– Волноводный аттенюатор.
В данном случае прибор относится к числу аттенюаторов, обеспечивающих затухание за счет поглощения мощности материалом, помещенным в электромагнитное поле. Схема аттенюатора для круглого волновода, возбуждаемого волной, показана на рисунке 1. Здесь 1 и 3 – неподвижные участки волновода, 2 – его вращающийся участок. Когда все три поглощающие пластины П во всех участках волновода лежат в одной плоскости, то затухание близко к нулю. По мере
поворота поглощающей пластины 2 во вращающейся части волновода затухание на выходном конце волновода увеличивается.
Проанализировав данный узел можно составить структурную схему взаимодействия узлов и механизмов аттенюатора.
На рисунке 2 в механизме условно выделены следующие составляющие звенья: волноводы, которые в свою очередь можно разделить на подвижные и неподвижные, и отсчетное устройство – собственно шкалу. Два последних звена непосредственно контактируют с червячным редуктором.
Механизм поворота
и отсчета аттенюатора
Волноводы Отсчетное устройство
Неподвижные Подвижные Шкала
Реклама

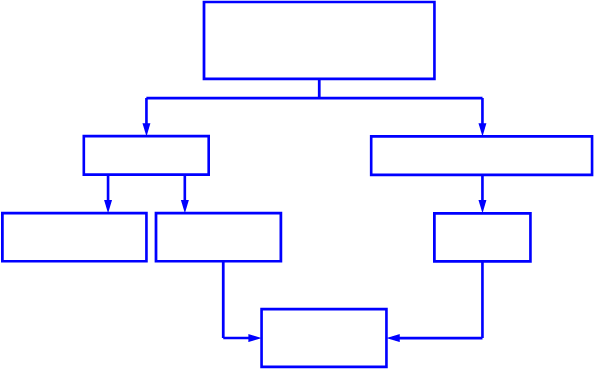
Редуктор
Рисунок 2
– Структурная схема механизма поворота
и отсчета аттенюатора
Задание
Разработать конструкцию механизма поворота поглощающей пластины П центрального волновода 2 поляризационного аттенюатора в сочетании с отсчетным устройством по кинематической схеме, исходным данным (Таблица 1) и следующим техническим требованиям:
1) затухание сигнала в волноводе 3 обеспечить поворотом волновода 2 с пластиной П на угол от q=0 до q=qmax
. Затухание А в децибелах определяют по формуле  ; ;
2) пластину П изготовить из двойного слоя слюды толщиной 0,25 мм с нанесением поглощающего слоя из графита;
3) отверстия входного 1 и выходного 3 волноводов выполнить прямоугольными с размерами 12´28 мм. На торцах предусмотреть контактные фланцы;
4) соединение центрального подвижного волновода с неподвижным выполнить дроссельными фланцами;
5) для улучшения электрических характеристик контура контактные и токопроводящие поверхности серебрить.
Из условия задачи имеем следующие исходные параметры:
- передаточное число червячной передачи и=12
;
- заходность червяка z1
=4
;
- число зубьев на колесе z2
=48
;
- модуль зацепления m=1 мм
.
Таблица 1.
Исходные параметры
| Постоян-ная затуха-ния М |
Наибольшая относительная погрешность настройки и отсчета |
Диапазон затухания
|
Внутренний диаметр центрального волновода |
Диаметр шкалы отсчетного устройства |
| qÎ[0;45°] |
qÎ[45°;qmax
] |
Аmax
|
Amin
|
dв
,мм |
Dш
,мм |
| -45 |
0,5 |
2,0 |
70 |
0 |
32 |
140 |
1 Расчет геометрических параметров
Производим анализ технического задания: из условий следует, что делительный диаметр червячного колеса должен обеспечивать минимально необходимую высоту колеса над втулкой волновода. Выполним проверку этого условия.
Делительный диаметр червячного колеса  (мм). (мм).
Внутренний диаметр волновода dв
=32 мм.
Отсюда видно, что диаметральная разность r=d2
-dв
=48-32=16 (мм),
что конструктивно не исполнимо.
Увеличиваем число зубьев на колесе z2
=80
.
Производим пересчет передаточного числа u=z2
/z1
=80/4=20.
Производим расчет геометрических параметров редуктора.
1 Ход червяка p1
=
p
mz1
=12,56(мм)
;
2 Угол подъема винта червяка g= =11°19¢ =11°19¢
где q=20
– коэффициент диаметра червяка по ГОСТ 2144-76;
3 Межосевое расстояние aw
=0,5
×
m(z2
+q)=50 (мм);
4 Делительный диаметр червяка d1
=m
×
q =20 (мм);
5 Делительный диаметр червяка d2
=m
×
z2
=80 (мм);
6 Длинна нарезной части червяка b1
³
2m( )=2
×
(8,9+1)=19,8(мм) )=2
×
(8,9+1)=19,8(мм)
принимаем b1
=30 (мм);
7 Высота витка h1
=h1
*
×
m=2,2 (мм)
тут h1
*
=2 ha
*
+c1
*
=2
×
1+0,2=2,2
;
8 Высота головки ha1
= ha
*
×
m=1 (мм)
;
9 Диаметр вершин червяка da1
=m(q+2 ha
*
)=20+2
×
1=22 (мм)
;
Реклама

10 Диаметр вершин колеса da2
=d2
+2ha
*
m=80+2
×
1
×
1=82 (мм)
;
11 Диаметр впадин червяка
df1
=d1
-2m(ha
*
+с1
*
)=20-2(1+0,2)=17,6 (мм)
;
12 Диаметр впадин колеса
df2
=d2
-2m(ha
*
+с2
*
)=80-2(1+0,2)=77,6(мм)
;
13 Радиус кривизны r
t1
=
r
t2
= m
r
t
*
=0,3
×
1=0,3 (мм)
;
14 Ширина венца b2
=0,75d1
=0,75
×
20=15 (мм)
;
15 Угол обхвата b
=
 44
°
14
¢
44
°
14
¢
16 Радиус дуги, образующей кольцевую поверхность вершин зубьев червячного колеса R=0,5d1
- mha
*
=0,5
×
20-1
×
1=9 (мм)
.
2 Проверочный расчет червячной пары на прочность
При расчетах принимаем, что к валу червяка приложен крутящий момент М1
=Мвх
=1 Нм
.
1 Определяем КПД редуктора
h
=0,93tg
g
×
ctg(
g
+
r
)=0,93tg11
°
19
¢
×
ctg(11
°
19
¢
+1
°
43
¢
)=0,8
где r
=arctg f=arctg0,03=1
°
43
¢
.
Момент на выходе редуктора  (Нм)
. (Нм)
.
2 Определяем силы, действующие в зацеплении
 (Н), (Н),
 (Н) (Н)
 °=145,6(Н) °=145,6(Н)
3 Проверка по контактным и изгибающим напряжениям
 , ,
из [3] для пары бронза-сталь  ; ;
для материала БрОНФ10-1-1 при центробежном литье предельнодопустимое напряжение [
s
н
]=210Мпа
[3,табл.20], откуда следует s
н
<
[
s
н
]
.
 (Мпа), (Мпа),
тут YF
– коэффициент формы зуба, что зависит от эквивалентного числа зубьев  . На основании [9,табл.3.1] выбираем YF
=1,34. Коэффициенты КН
и КF
принимаются равными 1, исходя из того, что редуктор выполняется при высокой точности, скорость скольжения Vск
<3 м/с
и рабочая нагрузка постоянна. . На основании [9,табл.3.1] выбираем YF
=1,34. Коэффициенты КН
и КF
принимаются равными 1, исходя из того, что редуктор выполняется при высокой точности, скорость скольжения Vск
<3 м/с
и рабочая нагрузка постоянна.
Для материала БрОНФ10-1-1 предельнодопустимое напряжение [
s
F
]=41Мпа
[3,табл.21], откуда следует s
F
<
[
s
F
]
.
3 Расчет вала червяка (Построение эпюр)
1 Определяем реакции опор и изгибающий момент в горизонтальной плоскости
 (Н)
, (Н)
,  (Н)
; (Н)
;
 (Нм)
; (Нм)
;
2 Определяем реакции опор и изгибающий момент в вертикальной плоскости
 (Н)
, (Н)
,
 (Н)
; (Н)
;
 (Нм)
, (Нм)
,  (Нм)
; (Нм)
;
 (Нм)
; (Нм)
;
3 Определяем эквивалентный изгибающий момент
 (Нм)
; (Нм)
;
4 Строим эпюры (рисунок 2).
 RA
F RB RA
F RB
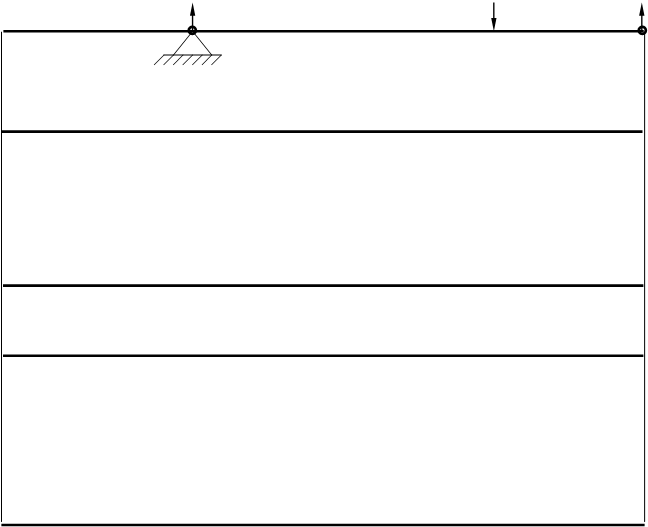

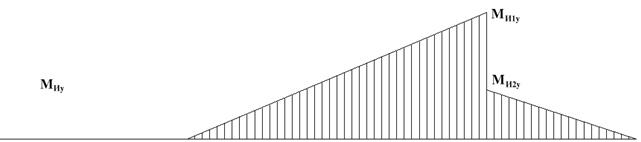


Рисунок 3
– Эпюры приложенных сил и моментов к валу червяка.
5 Определяем диаметр вала червяка
5.1 Из условия прочности на кручение
 , ,  , ,
где предельно допустимое напряжение кручения для стали 45
соответствует [
s
кр
]=30 МПа
[5].
5.2 При действии эквивалентного момента
 , ,  , ,
где предельно допустимое эквивалентное напряжение для стали 45 соответствует [
s
экв
]=0,33
s
в
=0,33
×
900=297 МПа
[5].
5.3 Из условия жесткости вала при кручении
 , ,
где [
j
]=8
×
10-3
рад/м
, G=8
×
105
МПа
[3,5], откуда имеем

5.4 Выбираем диаметр вала червяка d=12 мм
.
4 Выбор подшипников
На подшипник поз.16 (см. СП-56.998.85000СБ) действует осевая нагрузка, равная осевой нагрузке в червячном зацеплении, т.е. Far
=Fa1
=400 H
.
Выбираем подшипник из соотношения  , ,
где  . .
Отсюда следует, что подшипник воспринимает в большей степени осевые нагружения, исходя из чего на основании [7], выбираем шариковый радиально-упорный однорядный подшипник типа 36140 ГОСТ 831-75 [1] со следующими параметрами: d=15мм, D=40мм, b=12мм, С=4250Н, C0
=2672H, nmax
=25000 об/мин, m=0,06кг
.
Находим эквивалентную динамическую нагрузку
P=(XVFr
+YFa
)K
s
KT
=(0,43
×
1
×
88+400)
×
1
×
1=437,8(H),
тут при вращении внутреннего кольца V=1
; так как подшипник работает при температурах ниже 100°С, то KT
=1
; при нормальных условиях эксплуатации K
s
=1
[8]; при a
=18
°
по таблице на стр.394 [8] находим следующие значения коэффициентов X=0,43 Y=1,00, e=0,57
.
Расчетное значение базовой динамической грузоподъёмности
 , ,
где n=2 об/мин
– частота вращения подшипника; Lh
=20000 ч.
– долговечность подшипника.
Находим эквивалентную статическую нагрузку
P0
=X0
Fr
+Y0
Fa
=0,5
×
88+0,43
×
400=216(H),
где X0
=0,5
и Y0
=0,43
на основании [8] для a
=18
°
.
Из данных расчетов следует, что подшипник выбран правильно, так как 
5 Расчет шкалы
1 Угол поворота элемента настройки, соответствующий наибольшему затуханию

где Аmax
=70дБ
– максимальная величина вносимого затухания (табл.1); М=-45
– постоянная затухания (табл.1).
2 Абсолютная величина погрешности
 (дБ) (дБ)
где e
=0.25
– относительная погрешность настройки (табл.1).
3 Цена деления шкалы H=2
×
D
A=2
×
0.35=0.7(дБ/дел)
4 Число делений шкалы N=Amax
/H=70/0.7=100
5 Число оборотов шкалы при угле поворота элемента настройки Q
н
=
Q
max
будет
 (об) (об)
6 Число делений на каждом обороте N
¢
=N/K=100/4.9
@
20
7 Наименьшая длинна деления шкалы при наибольшем радиусе шкалы R0
=D
ш
/2=140/2=70(
мм)
и далее очерченной дугами окружностей будет на каждом полувитке (при m=1,3,...,2k
)

где величину [b]
обычно принимают не менее 1..1,5 мм
;

6 Расчет редуктора на точность
Исходя из технического задания, выбираем 8-ю степень точности, так как данный редуктор является отсчетным и к нему предъявляются повышенные требования по точности передачи углов поворота.
Определяем величину бокового зазора, соответствующего температурной компенсации:
jn
=0.68
×
aw
[
a
з.к.
(
t
з.к.
-20)-
a
к.
(
t
к.
-20)]
,
где aw
– межосевое расстояние; a
з.к.
=11.5
×
10-6
1/
°
С
– коэффициент линейного расширения материала колеса (сталь 35);a
к.
=22.7
×
10-6
1/
°
С
– коэффициент линейного расширения материала корпуса (дюралюминий); t
з.к
,
t
к
– предельные температуры зубчатого колеса и корпуса, принимаем равными t
з.к
=
t
к
= -10
°
С.
jn
=0.68
×
50[
11.5
×
10-6
.
(
-
10
-20)
-
22.7
×
10-6
.
(
-
10
-20)]
=0.011(мм)
.
Сравнивая полученное значение jn
=0,011
мм
с величинами наименьших боковых зазоров, по [3] определяем, что наиболее подходящим сопряжением для данной передачи является сопряжение Х, для которого jn min
=12
мкм.
На основании данных расчетов, имеем следующие заключения:
червячная передача выполняется по 8-й степени точности с видом сопряжения Х (ГОСТ 9368-60).
Литература
1. Анурьев В.И. Справочник конструктора-машиностроителя. Т.2.- М.: Машиностроение, 1979.
2. Заплетохин В.А. Конструирование деталей механических устройств: Справочник.-Л.: Машиностроение, 1990.
3. Милосердин Ю.В. и др. Расчет и конструирование механизмов приборов и установок.-М.: Машиностроение, 1985.
4. Мягков В.Д. Допуски и посадки: Справочник.
5. Писаренко Г.С. Сопротивление материалов.-К.:“Вища школа”,1986.
6. Рощин . . Курсовое проектирование механизмов РЭС.
7. Справочник конструктора точного приборостроения. Под ред. К.Н. Явленского и др.- Л.: Машиностроение, 1989.
8. Справочник металиста. Под ред. С.А. Чернавского и В.Ф. Рещикова. М.:“Машиностроение”, 1976.
9. Тищенко О.Ф. Элементы приборных устройств.-М.: Высш. школа,1978.
|
