Введение
Управление
каким-либо
объектом – это
процесс воздействия
на него с целью
обеспечения
требуемого
течения процессов
в объекте или
требуемого
изменения его
состояния.
Основой управления
является переработка
информации
о состоянии
объекта в
соответствии
с целью управления.
Объект управления
может принадлежать
как к неживой
природе, в частности,
быть техническим
устройством
(самолет, станок
и т. п.), так и к
живой природе
(коллектив
людей, животное
и т. п.). В свою
очередь само
управление
также может
осуществляться
как человеком,
(пилот управляет
самолетом), так
и техническим
устройством
(самолетом
управляет
автопилот).
Управление,
осуществляемое
без участия
человека, называется
автоматическим
управлением.
Целью выполнения
курсовой работы
является применение
теоретических
положений
теории управления
для структурного
синтеза систем
управления
непрерывного
действия на
заданное качество
регулирования.
Курсовая работа
носит прикладной
характер и в
инженерной
практике может
быть использована
на этапе анализа
технического
задания, выработки
требований
к структуре
САР и параметров
её динамических
звеньев для
обеспечения
устойчивости
работы с требуемыми
показателями
качества по
быстродействию,
точности и
перерегулированию.
Составление
структурной
схемы нескорректированной
системы.
На рисунке 1.1.
представлена
структурная
схема нескорректированной
ситемы.

Рис. 1.1. Структурная
схема нескорректированной
системы
Где:
Wзу(S)
– передаточная
функция задающего
устройства;
Wу(S)
– передаточная
функция усилителя;

Wэд(S)
– передаточная
функция двигателя;

Wр(S)
– передаточная
функция редуктора;
Wз(S)
– передаточная
функция заслонки;
Wп(S)
– передаточная
функция паропровода;
Wт(S)
– передаточная
функция термопары;

з
– заданное
значение температуры
пара;
д
– действующее
значение температуры
пара;
Uз
– напряжение
на выходе задающего
устройства;
U
– напряжение
на выходе сравниваю
его устройства
(рассогласование);
U
– напряжение
на выходе усилителя;
Uт
– напряжение
на выходе термопары;
Все элементы
схемы соединены
последовательно,
поэтому общая
передаточная
функция разомкнутой
системы будет
равна произведению
передаточных
функций элементов
структурной
схемы:


 (1.1.) (1.1.)
где
 (1.2.) (1.2.)
Общий коэффициент
передачи
разомкнутой
системы.
 (1.3.) (1.3.)
где
Е = 4% - установившаяся
ошибка по скорости
при
 =0,08
В/с ; =0,08
В/с ;
КЗУ = 0,5*10-4 –
коэффициент
передачи задающего
устройства;
З0 = 800 –
температура
пара;
 1/с
1/с
Определение
коэффициента
передачи
усилителя.
где
КОБЩ = 500 1/с – общий
коэффициент
передачи усилителя;
КДВ = 0,9 об/(с*В)
– коэффициент
передачи двигателя;
КР = 1/i –
коэффициент
передачи редуктора,
i = 200 – передаточное
отношение
редуктора;
КЗ = 5 0С/угл.град
– коэффициент
передачи заслонки;
КП = 0,7 – коэффициент
передачи парапровода;
КТ = 0,5 *10-4 В/0С
– чувствительность;

Определение
передаточных
функций элементов
системы.
Wзу(S)
– передаточная
функция задающего
устройства;
=
0,5*10-4 В/0С
Wу(S)
– передаточная
функция усилителя;
 =6,35*108 =6,35*108
Wэд(S)
– передаточная
функция двигателя;
где
КДВ
= 9 об/(с*В) – коэффициент
передачи двигателя;
ТМ
= 0,3 с – механическая
постоянная
времени;
ТЭ
= 0,08 с – электрическая
постоянная
времени;
Представим
знаменатель
в виде типовых
звеньев S(Т1S+1)(T2S+1)
где
Т1
= 0,195 с
Т2
= 0,005 с

Wр(S)
– передаточная
функция редуктора;
=
1/i = 1/200 = 0,005
Wз(S)
– передаточная
функция заслонки;
=
5 0С/угл.град.
Wп(S)
– передаточная
функция паропровода;
= 0,7е – 0,009S
где
КП
= 0,7 – коэффициент
передачи паропровода;
=
0,009 с – время чистого
запаздывания;
Wт(S)
– передаточная
функция термопары;
где
КТ
= 0,5*10-4 В/0С –
чувствительность;
ТТ
= 0,05 с – постоянная
времени;
Определение
передаточной
функции разомкнутой
системы.

Определение
передаточной
функции замкнутой
системы.
Структурная
схема замкнутой
системы (рис
1.2):
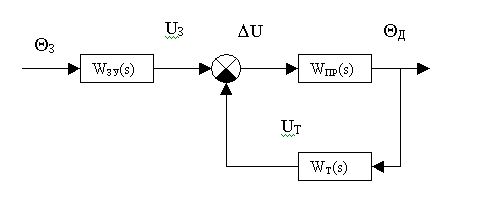
Рис 1.2. Структурная
схема замкнутой
системы.
где
WЗУ(S)
– передаточная
функция задающего
устройства;
WПР(S)
– передаточная
функция прямой
цепи;
Wт(S)
– передаточная
функция термопары;
з
– заданное
значение температуры
пара;
д
– действующее
значение температуры
пара;
Uз
– напряжение
на выходе задающего
устройства;
U
– напряжение
на выходе сравниваю
его устройства
(рассогласование);
U
– напряжение
на выходе усилителя;
Uт
– напряжение
на выходе термопары;
Передаточная
функция замкнутой
системы по
задающему
воздействию.
 
где
W(s) –
передаточная
функция разомкнутой
системы.

т.к.
КТ = КЗУ

где
КОБЩ = 500 1/с – общий
коэффициент
передачи усилителя;
=
0,009 с – время чистого
запаздывания;
Т 1
= 0,195 с 1
= 0,195 с
Т2
= 0,005 с - постоянные
времени
ТТ = 0,05 с
Передаточная
функция замкнутой
системы по
ошибке относительно
задающего
воздействия.
где Х(s) –
изображение
ошибки;
з
– заданное
значение температуры
пара;
где
W(s) –
передаточная
функция разомкнутой
системы;

где
КОБЩ = 500 1/с – общий
коэффициент
передачи усилителя;
=
0,009 с – время чистого
запаздывания;
Т1
= 0,195 с
Т2
= 0,005 с - постоянные
времени
ТТ = 0,05 с
Исследование
устойчивости
системы.
Исследование
системы по
критерию Гурвица.
Для устойчивости
системы управления
должны быть
положительны
все определители
матрицы, составленной
из коэффициентов
следующего
характеристического
уравнения:
D(p) = 1+W(s)|s=p
= 0


Разложим е -p
в ряд Макларена:
возьмем два
первых члена.
е -p
= 1 - р

Приведем полученное
характеристическое
уравнение к
типовому виду:

где
КОБЩ = 500 1/с – общий
коэффициент
передачи усилителя;
=
0,009 с – время чистого
запаздывания;
Т 1
= 0,195 с 1
= 0,195 с
Т2
= 0,005 с - постоянные
времени
ТТ = 0,05 с
тогда
а0 = T1T2TT
= 4.88*10-5 c3
a1
= T1TT
+ T2TT
+ T1T2
= 0.011 c2
a2
= T1 +
T2 +
TT =
0.25 c
a3
= 1 – KОБЩ*
= - 3.5
a4
= KОБЩ = 500
c-1
Необходимое
условие устойчивости:
ai >
0, для любого i
= 0 .. n – не
выполняется.
Проверим
по критерию
Гурвица:
 =
=
Найдем
все определители
матрицы:
1
= а1 = 0,011
2
= а1 а2
– а0
а3= 0,00275
3
= а1 а2
а3 – а0
а32 – а12
а4 = - 0.071
4
= а13
= - 0,00078
Определители
3 и 4
меньше нуля
и не удовлетворяют
критерию Гурвица.
Значит система
неустойчива.
Исследование
системы по
критерию Михайлова.
Для того чтобы
линейная система
четвертого
порядка была
устойчива
необходимо
и достаточно
чтобы вектор
описывающий
кривую Михайлова
при изменении
частоты от 0 до
бесконечности
поворачивался
на угол 360’
Для построения
кривой Михайлова
используем
характеристический
полином полученный
в предыдущем
пункте.

В характеристическом
полиноме выполним
подстановку
р = j
и получим
характеристический
комплекс:


Вещественная
часть:

Мнимая
часть

где
а0 =
T1T2TT
= 4.88*10-5
c3
a1
= T1TT
+ T2TT
+ T1T2
= 0.011 c2
a2
= T1 +
T2 +
TT =
0.25 c
a3
= 1 – KОБЩ*
= - 3.5
a4
= KОБЩ = 500
c-1
Задаваясь
различными
значениями
частоты вычислим
значения X()
и Y()
(таб 2.1).
Таблица 2.1.
| |
0 |
5 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
|
X()
|
500 |
493.78 |
475.49 |
707.81 |
314.53 |
224.93 |
180 |
232.45 |
446.69 |
898.85 |
|
Y()
|
0 |
-18.88 |
-46 |
-158 |
-402 |
-844 |
-1500 |
-2586 |
-4018 |
-5912 |
Кривая Михайлова
строится на
основе данных
таблицы (рис.
2.1.).
Рис. 2.1. Кривая
Михайлова.
Из
годографа мы
видим, что кривая
Михайлова с
увеличением
до бесконечности
будет постоянно
убывать, а
следовательно
не опишет угол
360 градусов. На
основании этого
делаем вывод,
что система
не устойчива.
Исследование
системы по
критерию Найквиста
на основе ЛЧХ.
Система будет
устойчива если
логарифмическая
амплитудная
характеристика
передаточной
функции разомкнутой
системы принимает
отрицательные
значения раньше,
чем фазовая
характеристика
достигнет
значения -1800.
У нас L=0 при
= 31 рад/с, а
= -1800 при
= 8 рад/с. На основании
этого делаем
вывод, что система
неустойчива
(рис. 2.2.).
L,
дб
,
рад/с
, рад/с
Рис. 2.2. ЛЧХ передаточной
функции разомкнутой
системы.
Определение
корректирующего
устройства.
Построение
желаемой ЛЧХ
системы.
Построение
желаемой ЛЧХ
включает в себя
2 этапа, это
построение
располагаемой
ЛЧХ, и построение
желаемой ЛЧХ.
Построение
располагаемой
ЛЧХ системы.
Располагаемую
ЛЧХ системы
будем строить
по передаточной
функции разомкнутой
системы.
где
КОБЩ = 500 1/с – общий
коэффициент
передачи усилителя;
= 0,009 с – время
чистого запаздывания;
ТТ = 0,05 с – постоянная
времени термопары;
Т1 = 0,195 с , Т2 = 0,005 с
– постоянные
времени электродвигателя;
Сопрягающие
частоты:
 рад/с рад/с  дек дек
 рад/с рад/с  дек дек
 рад/с рад/с  дек дек
График
располагаемой
ЛЧХ мы построили
в п. 2.3., рассмотрим
его еще раз
(рис. 3.1.)
1
2
т
-20
дб/дек
 
-40
дб/дек
-60
дб/дек
,
рад/с
-80
дб/дек
Рис. 3.1. График
располагаемой
ЛЧХ.
Построение
желаемой ЛЧХ
системы.
а). Низкочастотный
участок желаемой
ЛЧХ ( до 1
) совпадает с
низкочастотным
участком
располагаемой
ЛЧХ.
б). Среднечастотный
участок желаемой
ЛАХ проводится
из условия
обеспечения
требуемых
запасов устойчивости
для выполнения
заданной величины
перерегулирования
– и времени
регулирования
– tp.
= 28 %
tp = 0.75 c
Среднечастотный
участок желаемой
ЛЧХ пересекает
частотную ось
на частоте
среза ср
и проходит под
наклоном равным
–20 дб/дек. Частота
среза определяется
согласно номограмме
Солодовникова.
 рад/с Lg(ср)
= 1.21 дек
рад/с Lg(ср)
= 1.21 дек
Протяженность
среднечастотного
участка от
частоты среза
определяет
запас устойчивости
по амплитуде
и находится
по номограмме
Бессекерского.
Для =
28 % получаем Lh
= 15 дб.
в). Среднечастотный
участок желаемой
ЛЧХ сопрягается
с низкочастотным
участком отрезком
ЛЧХ, имеющим
наклон -60 дб/дек.
г). Высокочастотный
участок желаемой
ЛЧХ проводится
параллельно
высокочастотному
участку располагаемой
ЛЧХ.
В итоге получаем
желаемую ЛЧХ
(рис. 3.2.)
I
II
III

 
Рис. 3.2. График
желаемой ЛЧХ
Определение
передаточной
функции разомкнутой
желаемой системы.
Определим
сопрягающие
частоты.
I = 0.5 рад/с
II = 3.16 рад/с
III = 100
рад/с
Определим
постоянные
времени:
TI
= 1/I
= 2 c
TII
= 1/II
= 0.32 c
TIII
= 1/III
= 0.01 c
Получаем
желаемую передаточную
функцию разомкнутой
системы:
Где
КОБЩ = 500 1/с – общий
коэффициент
передачи усилителя;
= 0,009 с – время
чистого запаздывания;
Определение
передаточной
функции корректирующего
устройства.
Выберем
последовательный
тип корректирующего
устройства.
Тогда
WЖ(s)
= WР(s)*WПКУ(s)
Где
WЖ(s)
– желаемая
передаточная
функция
WР(s)
– располагаемая
передаточная
функция
WПКУ(s)
– передаточная
функция корректирующего
устройства
Перейдем
к ЛАХ
LЖ(s)
= LР(s) + LПКУ(s)
LПКУ(s)
= LЖ(s) – LР(s)
Для
построения
ЛАХ корректирующего
устройства
необходимо
взять разность
ЛАХ желаемой
и располагаемой
систем (рис.
3.3.).
III
1
II
I
T
2
Рис. 3.3. Графики
располагаемой
и желаемой ЛАХ.
Производим
вычитание:
а).
Участок графика
до частоты I
– пройдет с
наклоном (-20) –
(-20) = 0 дб/дек.
б).
Участок графика
от I
до II
– с наклоном
(-60) – (-20) = -40 дб/дек.
в).
Участок графика
от II
до 1
– с наклоном
(-20) – (-20) = 0 дб/дек.
г).
Участок графика
от 1
до Т
– с наклоном
(-20) – (-40) = 20 дб/дек.
е).
Участок графика
от Т
до III
– с наклоном
(-20) – (-60) = 40 дб/дек.
ж).
Участок графика
от III
до 2
– с наклоном
(-80) – (-60) = -20 дб/дек.
з).
Участок графика
от 2
– с наклоном
(-80) – (-80) = 0 дб/дек.
Получаем
график переходного
процесса (рис.
3.4.):
Рис. 3.4. График
переходного
процесса.
Где:
I = 0.5 рад/с
TI =
2 c
II = 3.16 рад/с
TII =
0.32 c
1 = 5.13 рад/с T1
= 0.195 c
T = 20 рад/с TT
= 0.05 c
III = 100 рад/с
TIII
= 0.01 c
2 = 200 рад/с T2
= 0.005 c
= 0,009 с
Определяем
передаточную
функцию корректирующего
устройства:

Определение
желаемой
передаточной
функции замкнутой
системы, построение
переходного
процесса и
выполнение
анализа качества
процесса
регулирования.
Для
получения
желаемой передаточной
функции замкнутой
системы воспользуемся
формулой.
Где
WЖ(s)
– желаемая
передаточная
функция разомкнутой
системы;
WЗУ(s)
= КЗУ = КТ –
передаточная
функция задающего
устройства;
WПР(s)
– передаточная
функция прямой
цепи;
Где
Где

КОБЩ = 500 1/с – общий
коэффициент
передачи усилителя;
= 0,009 с – время
чистого запаздывания;
TI
= 2 c
TII
= 0.32 c
TIII
= 0.01 c
 =
0,5*10-4 В/0С =
0,5*10-4 В/0С
Где
WТ(s) – передаточная
функция термопары;
Где
КТ = КЗУ =
0,5*10-4 – чувствительность;
ТТ = 0,05 – постоянная
времени термопары;
Получаем:



Получили
передаточную
функцию замкнутой
системы:

Где:
КОБЩ = 500 1/с – общий
коэффициент
передачи усилителя;
= 0,009 с – время
чистого запаздывания;
TI
= 2 c
TII
= 0.32 c
TIII
= 0.01 c
ТТ = 0,05 – постоянная
времени термопары;
Для
построения
переходного
процесса заменим
е-S
на (-s+1)

Из
условия необходимо
чтобы величина
перерегулирования
была
не больше 28%.
Где
y(tm)
– максимальное
отклонение
управляемой
величины от
заданного
значения;
y()
= 0з
= 80 0С – заданное
значение управляющей
величины;

Чтобы
время регулирования
соответствовало
заданному
значению должно
выполняться
условие:
Где
y(tp)
– значение
управляющей
величины при
достижении
времени, равном
времени регулирования
tP =
0.75 c.
|
