| Министерство образования РБ
Учреждение образования
Белорусский государственный университет
Информатики и радиоэлектроники
Кафедра радиотехнических систем
Реферат по дисциплине
Основы информационных технологий
«Методы нулевого порядка минимизации функций многих переменных. Постановка задачи. Описание метода. Преимущества и недостатки метода.»
Выполнил Проверил
магистрант группы Синицин А.К.
Минск 2010
СОДЕРЖАНИЕ
| 1. Постановка задачи…………………………………………………….
|
3
|
| 2. Обзор основных методов……………………………………………...
|
4
|
| 2.1 Метод прямого поиска (метод Хука-Дживса)...……………………
|
5
|
| 2.2 Метод деформируемого многогранника (метод Нелдера-Мида)....
|
7
|
| 2.3 Метод полного перебора (метод сеток)………………………….…
|
9
|
| СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ………………………..
|
11
|
1.
Постановка задачи.
Задачи о нахождение минимума функций одной или многих переменных являются весьма распространенными. Развитые для этой цели методы позволяют также находить решения систем уравнений. Методы нахождения минимума разделяют на методы 0-го, 1-го, 2-го и т.д. порядка. Наибольшей популярностью, при решении задач такого рода на компьютере, пользуются методы 0-го порядка для нахождения минимума функции, которые используют лишь значения этой функции.
В этих методах для определения направления спуска не требуется вычислять производные целевой функции. Направление минимизации в данном случае полностью определяется последовательными вычислениями значений функции. Следует отметить, что при решении задач безусловной минимизации методы первого и второго порядков обладают, как правило, более высокой скоростью сходимости, чем методы нулевого порядка. Однако на практике вычисление первых и вторых производных функции большого количества переменных весьма трудоемко. В ряде случаев они не могут быть получены в виде аналитических функций. Определение производных с помощью различных численных методов осуществляется с ошибками, которые могут ограничить применение таких методов. Кроме того, на практике встречаются задачи, решение которых возможно лишь с помощью методов нулевого порядка, например задачи минимизации функций с разрывными первыми производными. Критерий оптимальности может быть задан не в явном виде, а системой уравнений. В этом случае аналитическое или численное определение производных становится очень сложным, а иногда невозможным. Для решения таких практических задач оптимизации могут быть успешно применены методы нулевого порядка. Рассмотрим некоторые из них для минимизации функций многих переменных
Реклама

y
=
f
(
x
1 ,...,xn
) =
f
(
x
)
(1)
2.
Обзор основных методов.
Практически все существующие методы по способу достижения поставленной задачи можно разбить на две большие группы:
а. Метод перебора.
Как и в случае функций одной переменной, метод сводится к расчету набора значений функции в некоторой области и выбору минимального значения. Метод позволяет найти глобальный минимум функции. Для задач с высокой размерностью приводит к недопустимо большому количеству вычислений.
б. Симплекс-метод
. Это своеобразный метод нулевого порядка, основанный на построении симплекса – множества равноудаленных точек, в количестве на единицу превышающем размерность пространства. В двумерном случае симплекс – это равносторонний треугольник. В трехмерном случае – правильная треугольная пирамида. На начальном шаге итерационного процесса даются координаты исходного симплекса и в них рассчитываются значения минимизируемой функции. Среди вершин симплекса находится та, в которой функция имеет наибольшее значение. Для построения нового симплекса эта вершина отбрасывается. Вместо нее выбирается новая вершина, симметрично отраженная от плоскости, проведенной через остальные вершины. В новой вершине рассчитывается значение функции. В старых же вершинах, вошедших в новый симплекс, значения функции уже известны. Снова находится вершина, в которой функция имеет наибольшее значение. И так далее. Ключевым моментом является то, что на каждом шаге итерационного процесса требуется расчет функции лишь в одной точке. Для минимизации функций в многомерных пространствах это оказывается очень важным.
2.1 Метод прямого поиска (метод Хука-Дживса)
Метод был разработан в 1961 году, но до сих пор является весьма эффективным и оригинальным. На разработку методов прямого поиска для определения минимума функций и переменных было затрачено много усилий. Методы прямого поиска являются методами, в которых используются только значения функции. Практика показала, что этот метод эффективен и применим для широкого числа приложений. Рассмотрим функцию двух переменных. Ее линии постоянного уровня на рисунке 1, а минимум лежит в точке (x1
*
, x2
*
).
Реклама

Простейшим методом поиска является метод покоординатного спуска. Из точки А мы производим поиск минимума вдоль направления оси и , таким образом, находим точку В, в которой касательная к линии постоянного уровня параллельна оси . Затем, производя поиск из точки В в направлении оси , получаем точку С, производя поиск параллельно оси , получаем точку D, и т. д. В выбранном направлении осуществляют спуск до тех пор, пока значение функции уменьшается. После того как в данном направлении не удается найти точку с меньшим значением функции, уменьшают величину шага спуска. Если последовательные дробления шага не приводят к уменьшению функции, от выбранного направления спуска отказываются и осуществляют новое обследование окрестности и т. д.

Рисунок 1 – Нахождение минимума функции двух переменных
Достоинством метода прямого поиска является простота его программирования на компьютере. Он не требует знания целевой функции в явном виде, а также легко учитывает ограничения на отдельные переменные, а также сложные ограничения на область поиска.
Недостаток метода прямого поиска состоит в том, что в случае сильно вытянутых, изогнутых или обладающих острыми углами линий уровня целевой функции он может оказаться неспособным обеспечить продвижение к точке минимума. Действительно, в случаях, изображенных на рисунке 2, а и б, каким бы малым ни брать шаг в направлении х1
или x2
из точки х’ нельзя получить уменьшения значения целевой функции.
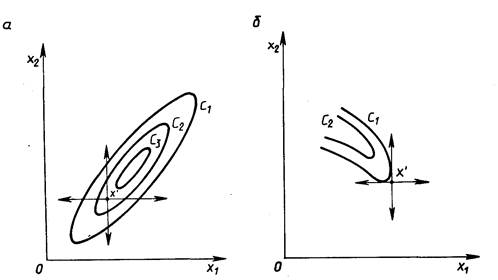
Рисунок 2 – Прямой поиск: невозможность продвижения к минимуму:
а – С1 > C2 > C3; б - С1 > C2
Блок-схема данного метода:

Рисунок 3 – Блок-схема метода Хука-Дживса
2.2 Метод деформируемого многогранника (метод Нелдера-Мида)
Метод Нелдера-Мида, также известный как метод деформируемого многогранника и симплекс-метод, – метод безусловной оптимизации функции от нескольких переменных, не использующий производной функции, поэтому легко применим к негладким и зашумлённым функциям.
Суть метода заключается в последовательном перемещении и деформировании симплекса вокруг точки экстремума.
Метод находит локальный экстремум и может «застрять» в одном из них. Если всё же требуется найти глобальный экстремум, можно пробовать выбирать другой начальный симплекс. Более развитый подход к исключению локальных экстремумов предлагается в алгоритмах, основанных на методе Монте-Карло, а также в эволюционных алгоритмах.
Пусть требуется найти безусловный минимум функции n переменных  . Предполагается, что серьёзных ограничений на область определения функции нет, то есть функция определена во всех встречающихся точках. . Предполагается, что серьёзных ограничений на область определения функции нет, то есть функция определена во всех встречающихся точках.
Параметрами метода являются:
1) коэффициент отражения α > 0, обычно выбирается равным 1.
2) коэффициент сжатия β > 0, обычно выбирается равным 0,5.
3) коэффициент растяжения γ > 0, обычно выбирается равным 2.
Алгоритм данного метода такой:
1. «Подготовка». Вначале выбирается n + 1 точка  , образующие симплекс n-мерного пространства. В этих точках вычисляются значения функции: , образующие симплекс n-мерного пространства. В этих точках вычисляются значения функции:  . .
2. «Сортировка». Из вершин симплекса выбираем три точки: xh
с наибольшим (из выбранных) значением функции fh
, xg
со следующим по величине значением fg
и xl
с наименьшим значением функции fl
. Целью дальнейших манипуляций будет уменьшение по крайней мере fh
.
3. Найдём центр тяжести всех точек, за исключением xh
:  . Вычислять fc
= f(xc
) не обязательно. . Вычислять fc
= f(xc
) не обязательно.
4. «Отражение». Отразим точку xh
относительно xc
с коэффициентом α (при α = 1 это будет центральная симметрия, в общем случае — гомотетия), получим точку xr
и вычислим в ней функцию: fr
= f(xr
). Координаты новой точки вычисляются по формуле:
xr
= (1 + α)xc
− αxh
(2)
5. Далее смотрим, насколько нам удалось уменьшить функцию, ищем место fr
в ряду fh
,fg
,fl
.
Если fr
< fl
, то направление выбрано удачное и можно попробовать увеличить шаг. Производим «растяжение». Новая точка xe
= (1 − γ)xc
+ γxr
и значение функции fe
= f(xe
).
Если fe
< fl
, то можно расширить симплекс до этой точки: присваиваем точке xh значение xe и заканчиваем итерацию (на шаг 9).
Если fe
> fl
, то переместились слишком далеко: присваиваем точке xh
значение xr
и заканчиваем итерацию (на шаг 9).
Если fl
< fr
< fg
, то выбор точки неплохой (новая лучше двух прежних). Присваиваем точке xh
значение xr
и переходим на шаг 9.
Если fh
> fr
> fg
, то меняем местами значения xr
и xh
. Также нужно поменять местами значения fr
и fh
. После этого идём на шаг 6.
Если fr
> fh
, то просто идём на следующий шаг 6.
В результате (возможно, после переобозначения) fr
> fh
> fg
> fl
.
6. «Сжатие». Строим точку xs
= βxh
+ (1 − β)xc
и вычисляем в ней значение fs
= f(xs
).
7. Если fs
< fh
, то присваиваем точке xh
значение xs
и идём на шаг 9.
8. Если fs
> fh
, то первоначальные точки оказались самыми удачными. Делаем «глобальное сжатие» симплекса — гомотетию к точке с наименьшим значением xl
:
 (3) (3)
9. Последний шаг — проверка сходимости. Может выполняться по-разному, например, оценкой дисперсии набора точек. Суть проверки заключается в том, чтобы проверить взаимную близость полученных вершин симплекса, что предполагает и близость их к искомому минимуму. Если требуемая точность ещё не достигнута, можно продолжить итерации с шага 2.
2.1 Метод полного перебора (метод сеток)
Многомерные задачи, естественно, являются более сложными и трудоемкими, чем одномерные, причем обычно трудности при их решении возрастают при увеличении размерности. Возьмем самый простой по своей идее приближенный метод поиска наименьшего значения функции. Покроем рассматриваемую область сеткой G с шагом h (рисунок 4) и определим значения функции в ее узлах. Сравнивая полученные числа между собой, найдем среди них наименьшее и примем его приближенно за наименьшее значение функции для всей области.
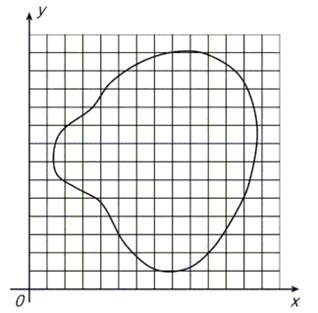
Рисунок 4 – Покрытие рассматриваемой области сеткой G с шагом h
Данный метод используется для решения одномерных задач. Иногда он применяется также для решения двумерных, реже трехмерных задач. Однако для задач большей размерности он практически непригоден из-за слишком большого времени, необходимого для проведения расчетов. Действительно, предположим, что целевая функция зависит от пяти переменных, а область определения G является пятимерным кубом, каждую сторону которого при построении сетки мы делим на 40 частей. Тогда общее число узлов сетки будет равно 415
≈ 108
. Пусть вычисление значения функции в одной точке требует 1000 арифметических операций (это немного для функции пяти переменных). В таком случае общее число операций составит 1011
. Если в нашем распоряжении имеется ЭВМ с быстродействием 1 млн. операций в секунду, то для решения задачи с помощью данного метода потребуется 105
секунд, что превышает сутки непрерывной работы. Добавление еще одной независимой переменной увеличит это время в 40 раз. Проведенная оценка показывает, что для больших задач оптимизации метод сплошного перебора непригоден. Иногда сплошной перебор заменяют случайным поиском. В этом случае точки сетки просматриваются не подряд, а в случайном порядке. В результате поиск наименьшего значения целевой функции существенно ускоряется, но теряет свою надежность.
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
1. Ю.В. Губарь «Введение в математическое программирование», ИНТУИТ
2. А.Г.Трифонов «Постановка задачи оптимизации и численные методы ее решения», Консультационный Центр MATLAB
3. Материалы интернет портала «Википедия»: http://ru.wikipedia.org/
4. Н.Н. Калинкин «Численные методы», 1978 г., Наука
|
