Электромеханическая характеристика =f(I).
Электромеханическая =f(I) и механическая =f(М) характеристики двигателя при разных токах возбуждения.
красн. – механические черн. - скоростные
Вариант №3 Задача №1. Составить принципиальную схему, которая обеспечивает следующие процессы: - управление пуском асинхронного двигателя с фазным ротором в функции времени в две ступени и защиту от коротких замыканий и продолжительных перегрузок.
На рис.1 приведена схема управления асинхронным двигателем с фазным ротором, в цепь которого введен пусковой резистор. Управление двигателем осуществляется с помощью кнопок КнП и КнС. Пуск осуществляется в функции времени с помощью электромагнитных реле времени, включенных через вентиль V. Для защиты цепей двигателя от КЗ служат максимальные реле РМ1, РМ2 и РМ3, от перегрузки – тепловые реле РТ, нагревательные элементы которых включены через трансформаторы тока ТТ1 и ТТ2. Цепи управления включены через автоматический выключатель, имеющий максимальную токовую защиту. Подготовка схемы к пуску двигателя осуществляется подачей напряжения выключателем В и ВА. При этом после включения ВА получит питание реле РУ1 и замыкающие контакты его закроются, подготавливается цепь включения РУ2 и КЛ; размыкающий контакт РУ1 размыкается и выключает цепь катушек контакторов ускорения КУ1 и КУ2. Если нажать кнопку КнП, то через замкнувшийся контакт РУ1 включается контактор КЛ и будет подано напряжение на обмотку статора двигателя М; в обмотку ротора при этом включены все пусковые резисторы – начинается пуск привода на первой реостатной характеристике. При включении контактора КЛ один из его замыкающих вспомогательных контакторов шунтирует кнопку КнП, и отпадает необходимость длительного удержания её в нажатом состоянии, а другой замыкающий – подаёт питание на цепь катушек реле ускорения РУ2. Размыкающий вспомогательный КЛ отключит цепь реле РУ1; так как оно отпускает якорь с выдержкой времени при отключении её катушки, то РУ2 сразу не выключится и его размыкающий контакт РУ2 будет открыт. Следует отметить, что размыкающий контакт РУ1 остается ещё открытым; по истечении выдержки времени реле РУ1 его замыкающий контакт откроется, а размыкающий – закроется. В результате этих переключений в схеме управления включится контактор КУ1 и будет шунтирована первая пусковая ступень резистора – двигатель с первой (реостатной) характеристики перейдет во вторую, разгоняясь до большей угловой скорости. Кроме того, выключиться реле времени РУ2 и его размыкающей контакт с выдержкой времени замкнет цепь катушки контактора КУ2 обмотка ротора М окажется замкнутой накоротко и двигатель начнет разгоняться в соответствии с его естественной характеристикой. Этим заканчивается ступенчатый пуск асинхронного двигателя, контролируемый в функции времени электромагнитным реле времени РУ1, РУ2. Остановка двигателя производится нажатием кнопки КнС.
Задача №2. Найдите и исправьте ошибки в схеме, которые могли произойти при монтаже. Последствия, к которым могут привести эти ошибки.
Правильный вариант схемы рис.2 должен обеспечивать выполнение следующих операций: пуска электродвигателя постоянного тока независимого возбуждения в функции тока в три ступени при движении «Вперед» и «Назад»; реверсирование электродвигателя при непосредственном нажатии на кнопку противоположного движения с обеспечением режима торможения противовключением; электрического торможения электродвигателя при остановке; защиты от короткого замыкания в цепях якоря и в цепях управления, контроля потери возбуждения, а так же защиты от пробоя обмотки возбуждения при ее отключении.
Исправления на схеме нанесены красным цветом рис.2. Ошибка: неверно подключены блокировочные контакты Кн5, Кв5, что привело бы к отключению двигателя при отпускании кнопки «Вперед» или «Назад». Ошибка: неверно подключены контакты Кв4, Кн4, что приведет к отключению, включению обмоток реле Кв или Кн (дребезг). Ошибка: неверно подключены контакты Кв3, Кн3, что приведет к неверному срабатыванию реле К4 РПВ и К5 РПН, соответственно неправильно срабатывают контакты этих реле К5.1 и К4.1, что приведет к тому, что система автоматического запуска на реле К3, К7, К8, К9 будет обесточена и двигатель будет работать с полностью введенным блоком реостатов Р1…Р4, что в последствии, при продолжительной работе, может вызвать их выход из строя. Ошибка: неправильное включение контактов К5.1, что делает невозможным запитку блока автоматического запуска на реле К3, К7, К8, К9 в режиме «Назад», двигатель будет работать с введенными блоками реостатов Р1…Р4, что в последствии может вызвать их выход из строя. Ошибка: перепутаны местами контакты в блоке автоматического запуска К7.2, К6.1, К8.2, К6.2, К9.2, К6.3, что приведет к неправильному запуску двигателя (в функции тока). Ошибка: в цепь реле К10 включены контакты реле РПВ К4 и РПН К5 – это приведет к тому, что при нажатии на кнопку «Стоп» цепь питания К10 будет разомкнута и соответственно отсутствие электрического торможения электродвигателя при остановке. Ошибка: не введены контакты К1.1 реле К1 в цепь питания реле Кн, Кв, это приведет к тому, что двигатель не отключится при больших токах и КЗ в цепи двигателя.
Вопрос № 1 Каково назначение пускового реостата?
При пуске двигателя пусковой ток превышает номинальный до 10 раз. Это неблагоприятно сказывается на электродвигателе (может выйти из строя), а также оказывает большое влияние на питающую сеть (перегрузки, броски тока). При многоступенчатом резисторном пуске, процесс пуска двигателя происходит в несколько этапов и итог двигателя во время пуска колеблется в пределах от Imax.пуск до Imin.пуск. В начале пуска Iнач= Imax.пуск, далее по мере ускорения двигателя растет его ЭДС, вследствие чего начинает уменьшаться ток в цепи якоря двигателя, а следовательно, и момент двигателя. Когда ток достигнет некоторого значения Imin.пуск, выключается часть пускового реостата с таким расчетом, чтобы ток двигателя снова достиг значения Iнач= Imax и т.д.
Вопрос № 2. Что собой представляет графический метод построения ступеней пускового реостата двигателя последовательного возбуждения?
Расчет ступеней пускового реостата может быть произведен графическим методом, не требующим построения самих реостатных характеристик двигателя. Для этого нужно воспользоваться естественной характеристикой двигателя =f(I) и, отметив на ней точки допустимых токов при переключении с одной ступени реостата на другую I1 и I2. Проведем через эти точки пунктиром две параллельные линии до пересечения с вертикалью Af в точках f и е. Вертикаль Af расположена влево от начала координат на расстоянии ОА, соответствующим внутреннему сопротивления двигателя. Откладываем в том же масштабе отрезки Оа=R1=U/I1 и Оq=R2=U/I2. Соединяя точки а и е, а также q и f, получаем две прямые, характеризующие линейную зависимость между скоростью двигателя и сопротивлением его якорной цепи при неизменном токе якоря. Для определения числа пусковых ступеней и их сопротивлений поступают следующим образом. Проводят вертикаль через точку а до пересечения с qf в точке b. Затем через b проводят линию, параллельную оси абсцисс до точки С на линии ае. Аналогично проводятся линии cd и de. Построение считается удачным, если последняя горизонталь проходит через точку е. Если этого не произойдет, то построение следует повторить, изменив наклон одной из прямых ае или qf за счет выбора новых значений I1 и I2.


Вопрос № 4. Какие применяют способы регулирования угловой частоты вращения двигателей?
Из уравнения =(U-IR)/Rф вытекает, что возможны три принципиально различных способа регулирования угловой частоты вращения двигателя постоянного тока: Изменением тока возбуждения (магнитного потока) двигателя. Изменением сопротивления цепи якоря посредством резисторов (реостатное). Изменением подводимого к якорю двигателя напряжения. Регулирование угловой частоты вращения двигателя изменением тока возбуждения является одним из наиболее простых и экономичных способов. Мощность, потребляемая обмоткой возбуждения двигателя, составляет примерно 2 – 2,5% мощности двигателя, поэтому этот способ находит широкое применение в современной практике. Ток возбуждения можно регулировать при помощи резистора (для двигателей малой мощности), посредством регулятора напряжения, а также импульсным параметрическим методом, при котором в цепь обмотки возбуждения с определенной частотой и длительностью вводится добавочный резистор. При регулировании угловой частоты изменением сопротивления цепи якоря изменяется жесткость характеристики, а с ней и стабильность угловой скорости. В большинстве случаев реостатное регулирование угловой скорости производится с помощью контакторов, замыкающих отдельные ступени резисторов, то есть скорость меняется дискретно. Возможно достижение плавного регулирования при использовании ползункового реостата или импульсного параметрического регулятора. Регулирование угловой частоты вращения двигателя изменением подводимого к якорю напряжения в большинстве случаев может изменяться вниз от основной, КПД в данном случае равен отношения фактической угловой частоты двигателя к угловой частоте идеального холостого хода на заданной характеристике. Т.к. напряжение питающей сети поддерживается постоянным, то указанный способ регулирования возможен при использовании соответствующего преобразователя с регулируемым напряжением постоянного тока на его выходе. Для двигателей переменного тока получили наибольшее распространение следующие способы регулирования угловой частоты асинхронных двигателей: Реостатное регулирование. Переключение числа полюсов. Изменение частоты питающего напряжения. Каскадное включение асинхронного двигателя с другими машинами или преобразователями.
Вопрос № 5. Какие основные показатели характеризуют различные способы регулирования скорости электропривода?
Основными показателями характеризующими различные способы регулирования скорости электроприводов являются: Диапазон регулирования – это отношение возможных установившихся скоростей D=max/min. Плавность регулирования – характеризует скачек скорости при переходе от данной скорости к ближайшей возможной. Плавность тем выше, чем меньше этот скачек. Экономичность – характеризуется затратами на сооружение и эксплуатацию электропривода. Экономически выгодным оказывается такой электропривод, который обеспечивает большую производительность приводимого им в действие механизма. Стабильность угловой скорости – характеризуется изменением угловой скорости при заданном отключении момента нагрузки и зависит от жесткости механической характеристики. Она тем выше, чем больше жесткость характеристики. Направление регулирования скорости – уменьшение или увеличение ее по отношению к основной скорости. Зависит от способов регулирования. Допустимая нагрузка двигателя – наибольшее значение момента, который двигатель способен развивать длительно при работе на регулировочных характеристиках, определяется нагревом двигателя и для разных способов регулирования будет различной.
Вопрос № 3. Что собой представляет графический метод построения ступеней пускового реостата асинхронного двигателя с фазным ротором?
Контрольная работа №1
Вопрос № 1 Каково назначение пускового реостата?
При пуске двигателя пусковой ток превышает номинальный до 10 раз. Это неблагоприятно сказывается на электродвигателе (может выйти из строя), а также оказывает большое влияние на питающую сеть (перегрузки, броски тока). При многоступенчатом резисторном пуске, процесс пуска двигателя происходит в несколько этапов и итог двигателя во время пуска колеблется в пределах от Imax.пуск до Imin.пуск. В начале пуска Iнач= Imax.пуск, далее по мере ускорения двигателя растет его ЭДС, вследствие чего начинает уменьшаться ток в цепи якоря двигателя, а, следовательно, и момент двигателя. Когда ток достигнет некоторого значения Imin.пуск, выключается часть пускового реостата с таким расчетом, чтобы ток двигателя снова достиг значения Iнач= Imax и т.д.
Вопрос № 2. Что собой представляет графический метод построения ступеней пускового реостата двигателя последовательного возбуждения?
Расчет ступеней пускового реостата может быть произведен графическим методом, не требующим построения самих реостатных характеристик двигателя. Для этого нужно воспользоваться естественной характеристикой двигателя =f(I) и, отметив на ней точки допустимых токов при переключении с одной ступени реостата на другую I1 и I2. Проведем через эти точки пунктиром две параллельные линии до пересечения с вертикалью Af в точках f и е. Вертикаль Af расположена влево от начала координат на расстоянии ОА, соответствующим внутреннему сопротивления двигателя. Откладываем в том же масштабе отрезки Оа=R1=U/I1 и Оq=R2=U/I2. Соединяя точки а и е, а также q и f, получаем две прямые, характеризующие линейную зависимость между скоростью двигателя и сопротивлением его якорной цепи при неизменном токе якоря. Для определения числа пусковых ступеней и их сопротивлений поступают следующим образом. Проводят вертикаль через точку, а до пересечения с qf в точке b. Затем через b проводят линию, параллельную оси абсцисс до точки С на линии ае. Аналогично проводятся линии cd и de. Построение считается удачным, если последняя горизонталь проходит через точку е. Если этого не произойдет, то построение следует повторить, изменив наклон одной из прямых ае или qf за счет выбора новых значений I1 и I2.


Вопрос № 4. Какие применяют способы регулирования угловой частоты вращения двигателей?
Из уравнения =(U-IR)/Rф вытекает, что возможны три принципиально различных способа регулирования угловой частоты вращения двигателя постоянного тока: Изменением тока возбуждения (магнитного потока) двигателя. Изменением сопротивления цепи якоря посредством резисторов (реостатное). Изменением подводимого к якорю двигателя напряжения. Регулирование угловой частоты вращения двигателя изменением тока возбуждения является одним из наиболее простых и экономичных способов. Мощность, потребляемая обмоткой возбуждения двигателя, составляет примерно 2 – 2,5% мощности двигателя, поэтому этот способ находит широкое применение в современной практике. Ток возбуждения можно регулировать при помощи резистора (для двигателей малой мощности), посредством регулятора напряжения, а также импульсным параметрическим методом, при котором в цепь обмотки возбуждения с определенной частотой и длительностью вводится добавочный резистор. При регулировании угловой частоты изменением сопротивления цепи якоря изменяется жесткость характеристики, а с ней и стабильность угловой скорости. В большинстве случаев реостатное регулирование угловой скорости производится с помощью контакторов, замыкающих отдельные ступени резисторов, то есть скорость меняется дискретно. Возможно достижение плавного регулирования при использовании ползункового реостата или импульсного параметрического регулятора. Регулирование угловой частоты вращения двигателя изменением подводимого к якорю напряжения в большинстве случаев может изменяться вниз от основной, КПД в данном случае равен отношения фактической угловой частоты двигателя к угловой частоте идеального холостого хода на заданной характеристике. Т.к. напряжение питающей сети поддерживается постоянным, то указанный способ регулирования возможен при использовании соответствующего преобразователя с регулируемым напряжением постоянного тока на его выходе. Для двигателей переменного тока получили наибольшее распространение следующие способы регулирования угловой частоты асинхронных двигателей: Реостатное регулирование. Переключение числа полюсов. Изменение частоты питающего напряжения. Каскадное включение асинхронного двигателя с другими машинами или преобразователями.
Вопрос № 5. Какие основные показатели характеризуют различные способы регулирования скорости электропривода?
Основными показателями, характеризующими различные способы регулирования скорости электроприводов являются: Диапазон регулирования – это отношение возможных установившихся скоростей D=max/min. Плавность регулирования – характеризует скачек скорости при переходе от данной скорости к ближайшей возможной. Плавность тем выше, чем меньше этот скачек. Экономичность – характеризуется затратами на сооружение и эксплуатацию электропривода. Экономически выгодным оказывается такой электропривод, который обеспечивает большую производительность приводимого им в действие механизма. Стабильность угловой скорости – характеризуется изменением угловой скорости при заданном отключении момента нагрузки и зависит от жесткости механической характеристики. Она тем выше, чем больше жесткость характеристики. Направление регулирования скорости – уменьшение или увеличение ее по отношению к основной скорости. Зависит от способов регулирования. Допустимая нагрузка двигателя – наибольшее значение момента, который двигатель способен развивать длительно при работе на регулировочных характеристиках, определяется нагревом двигателя и для разных способов регулирования будет различной.
Контрольная работа №2
Вопрос №1 Приведите сравнительную характеристику систем автоматического управления в функции времени, тока скорости. Укажите область применения этих систем.
1. Управление в функции угловой скорости [ЭДС]. Управление в функции угловой скорости требует контроля угловой скорости с последующим воздействием на соответствующий аппарат. Реле, непосредственно работающее в функции угловой скорости, например центробежные, в схемах управления пусками двигателей применяются сравнительно редко. Поэтому угловая скорость двигателя часто фиксируется косвенным путем – измерением других параметров, однозначно связанных с угловой скоростью. Для двигателей постоянного тока таким параметром является ЭДС двигателя, а для синхронных и асинхронных двигателей с фазным ротором, кроме того, частота тока в роторе и значение ЭДС ротора. Напряжение, зависящее от ЭДС, прикладывается к катушкам реле или контакторов, которые срабатывают при определенном значении ЭДС и осуществляют переключение пусковых резисторов в требуемой последовательности. Схемы пуска в функции угловой скорости (ЭДС) в современной практике для двигателей большой мощности не применяются. Подобные схемы встречаются лишь в приводах небольшой мощности, главным образом в металлообрабатывающих станках. 2. Управление в функции тока. Ток во время пуска двигателя колеблется в некоторых заданных пределах. 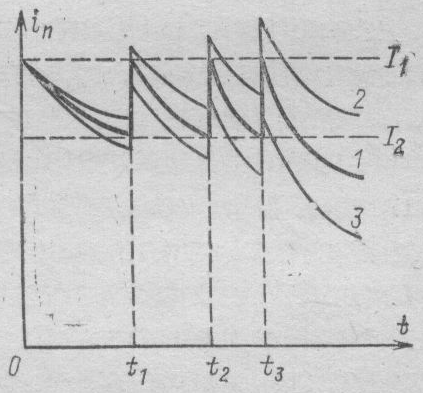
Кривые изменения тока при пуске в функции времени с различными нагрузками на валу двигателя.
Начальный толчок тока определяется значениями требуемого пускового момента и допустимого тока для данного двигателя. По мере увеличения угловой скорости двигателя его ток снижается. В момент снижения тока до определенного значения часть пускового резистора шунтируется, что приводит к новому увеличению тока до значения І1. Ток переключения І2 выбирают, исходя из необходимости обеспечить требуемое минимальное угловое ускорение при пуске двигателя с заданной нагрузкой, поэтому ток переключения должен всегда быть выше тока, определяемого моментом сопротивления. Схема автоматического пуска, построенная на принципе управления в функции тока, должна предусматривать одно или несколько реле, включаемых непосредственно в цепь якоря двигателя. Количество реле зависит от числа пусковых ступеней резисторов. Достоинство рассмотренного принципа управления заключается в том, что переключения производятся при заданных значениях тока в цепи якоря и не зависят от колебаний напряжения сети. Однако схемы, основанные на принципе управления в функции тока, не свободны от недостатков. Так, если при пуске двигателя нагрузочный момент на его валу по каким-либо причинам окажется выше расчетного, то ток может длительное время превышать значение І2, при котором происходит отпускание якоря реле. Поэтому пусковой резистор окажется не выключенным, что может привести к его перегоранию, так как он не рассчитан на длительную работу. 3. Управление функции времени. П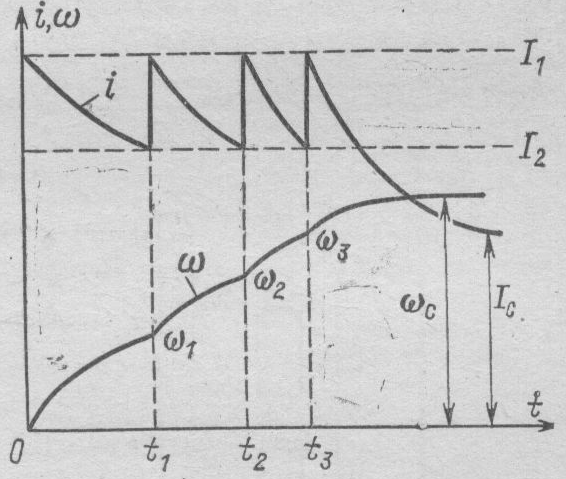
усковые диаграммы ω=f(t) и i=f1(t) приведенные на рисунке, показывают, что шунтирование ступеней пускового резистора должно происходить через определенные промежутки времени. Первая ступень резистора должна быть выведена через время t1 после начала пуска, вторая – через время t2 и т.д. Этим и определяется возможность создания схем управления, работающих в функции времени.
Пусковая диаграмма двигателя с тремя ступенями пускового резистора.
Для автоматизации пуска используются различные реле времени, настраиваемые на соответствующие выдержки времени. По принципу действия реле времени разделяются на механические, электромагнитные, электронные, полупроводниковые, пневматические и т.д. Необходимая выдержка времени каждого реле определяется на основании пусковой диаграммы. Для определения выдержки времени реле нужно из времени пуска двигателя, полученного по расчету, вычесть собственное время включения контакторов. Достоинством схем управления работающих в функции времени, является отсутствие опасности сколько-нибудь продолжительной работы двигателя с неполной угловой скоростью, чего не удается избежать в схемах, использующих принципы управления в функции угловой скорости или тока. Опасность, возникающая при весьма резком возрастании нагрузки, устраняется наличием максимальной защиты, с помощью которой двигатель отключается от сети. Простота и надежность в работе, также как и возможность применения однотипных реле времени, привели к широкому применению электроприводов, управляемых в функции времени.
Вопрос № 2. Какие основные виды защит электродвигателей должны предусматриваться в схемах автоматического управления электроприводами? Приведите примеры практического использования основных видов защит.
Для двигателей постоянного тока: - защита от короткого замыкания в цепях якоря и цепях управления; - контроль потери возбуждения; - защита от пробоя обмотки возбуждения при её отключении. Для двигателей переменного тока: - защита от короткого замыкания в цепях электродвигателя и управления; - защита от перегрузки; - нулевая защита.
Пример 1: защита от короткого замыкания в цепи якоря двигателя постоянного тока, независимого возбуждения, рисунок 2 – реле К1, максимальное токовое реле включенное в цепь якоря обесточивает цепи питания двигателя при КЗ в цепи якоря. Пример 2: контроль потери возбуждения, рисунок 2 – реле К2, при исчезновении тока протекающего через обмотку возбуждения размыкает цепь управления питанием двигателя. Пример 3: для защиты цепей асинхронного двигателя от КЗ, рисунок 1, служат максимальные токовые реле РМ1, РМ2, РМ3, от перегрузки – тепловые реле РТ, нагревательные элементы которых включены через трансформаторы тока ТТ1 и ТТ2.
Задача №1. Составить принципиальную схему, которая обеспечивает следующие процессы: - управление пуском асинхронного двигателя с фазным ротором в функции времени в две ступени и защиту от коротких замыканий и продолжительных перегрузок.
На рис.1 приведена схема управления асинхронным двигателем с фазным ротором, в цепь которого введен пусковой резистор. Управление двигателем осуществляется с помощью кнопок КнП и КнС. Пуск осуществляется в функции времени с помощью электромагнитных реле времени, включенных через вентиль V. Для защиты цепей двигателя от КЗ служат максимальные реле РМ1, РМ2 и РМ3, от перегрузки – тепловые реле РТ, нагревательные элементы которых включены через трансформаторы тока ТТ1 и ТТ2. Цепи управления включены через автоматический выключатель, имеющий максимальную токовую защиту. Подготовка схемы к пуску двигателя осуществляется подачей напряжения выключателем В и ВА. При этом после включения ВА получит питание реле РУ1, и замыкающие контакты его закроются, подготавливается цепь включения РУ2 и КЛ; размыкающий контакт РУ1 размыкается и выключает цепь катушек контакторов ускорения КУ1 и КУ2. Если нажать кнопку КнП, то через замкнувшийся контакт РУ1 включается контактор КЛ и будет подано напряжение на обмотку статора двигателя М; в обмотку ротора при этом включены все пусковые резисторы – начинается пуск привода на первой реостатной характеристике. При включении контактора КЛ один из его замыкающих вспомогательных контакторов шунтирует кнопку КнП, и отпадает необходимость длительного удержания её в нажатом состоянии, а другой замыкающий – подаёт питание на цепь катушек реле ускорения РУ2. Размыкающий вспомогательный КЛ отключит цепь реле РУ1; так как оно отпускает якорь с выдержкой времени при отключении её катушки, то РУ2 сразу не выключится и его размыкающий контакт РУ2 будет открыт. Следует отметить, что размыкающий контакт РУ1 остается ещё открытым; по истечении выдержки времени реле РУ1 его замыкающий контакт откроется, а размыкающий – закроется. В результате этих переключений в схеме управления включится контактор КУ1 и будет шунтирована первая пусковая ступень резистора – двигатель с первой (реостатной), характеристики перейдет во вторую, разгоняясь до большей угловой скорости. Кроме того, выключиться реле времени РУ2 и его размыкающей контакт с выдержкой времени замкнет цепь катушки контактора КУ2 обмотка ротора М окажется замкнутой накоротко и двигатель начнет разгоняться в соответствии с его естественной характеристикой. Этим заканчивается ступенчатый пуск асинхронного двигателя, контролируемый в функции времени электромагнитным реле времени РУ1, РУ2. Остановка двигателя производится нажатием кнопки КнС.
Задача №2. Найдите и исправьте ошибки в схеме, которые могли произойти при монтаже. Последствия, к которым могут привести эти ошибки.
Правильный вариант схемы рис.2 должен обеспечивать выполнение следующих операций: - пуска электродвигателя постоянного тока независимого возбуждения в функции тока в три ступени при движении «Вперед» и «Назад»; - реверсирование электродвигателя при непосредственном нажатии на кнопку противоположного движения с обеспечением режима торможения противовключением; - электрического торможения электродвигателя при остановке; - защиты от короткого замыкания в цепях якоря и в цепях управления, контроля потери возбуждения, а так же защиты от пробоя обмотки возбуждения при ее отключении.
Исправления на схеме нанесены красным цветом рис.2. 1. Ошибка: неверно подключены блокировочные контакты Кн5, Кв5, что привело бы к отключению двигателя при отпускании кнопки «Вперед» или «Назад». 2. Ошибка: неверно подключены контакты Кв4, Кн4, что приведет к отключению, включению обмоток реле Кв или Кн (дребезг). 3. Ошибка: неверно подключены контакты Кв3, Кн3, что приведет к неверному срабатыванию реле К4 РПВ и К5 РПН, соответственно неправильно срабатывают контакты этих реле К5.1 и К4.1, что приведет к тому, что система автоматического запуска на реле К3, К7, К8, К9 будет обесточена и двигатель будет работать с полностью введенным блоком реостатов Р1…Р4, что в последствии, при продолжительной работе, может вызвать их выход из строя. 4. Ошибка: неправильное включение контактов К5.1, что делает невозможным запитку блока автоматического запуска на реле К3, К7, К8, К9 в режиме «Назад», двигатель будет работать с введенными блоками реостатов Р1…Р4, что в последствии может вызвать их выход из строя. 5. Ошибка: перепутаны местами контакты в блоке автоматического запуска К7.2, К6.1, К8.2, К6.2, К9.2, К6.3, что приведет к неправильному запуску двигателя (в функции тока). 6. Ошибка: в цепь реле К10 включены контакты реле РПВ К4 и РПН К5 – это приведет к тому, что при нажатии на кнопку «Стоп» цепь питания К10 будет разомкнута и соответственно отсутствие электрического торможения электродвигателя при остановке. 7. Ошибка: не введены контакты К1.1 реле К1 в цепь питания реле Кн, Кв, это приведет к тому, что двигатель не отключится при больших токах и КЗ в цепи двигателя. |
