| Министерство образования Российской Федерации
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра промышленной электроники(ПрЭ)
ЦИФРОВОЙ СПИДОМЕТР ДЛЯ ГИБДД
Пояснительная записка к курсовому проекту по дисциплине «Микропроцессорные устройства и системы»
ФЭТ КП.ХХХХХХ.006 ПЗ
Студент группы
«__» _________ 200 г
Руководитель проекта
профессор кафедры ПрЭ
_______
«__» _________ 2007 г
C
ОДЕРЖАНИЕ
1 Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Конкретизация технического задания . . . . . . . . . . . . . . . . . . . . . 9
3 Разработка функциональной схемы устройства . . . . . . . . . . . . . 9
3.1 Радиолокационная установка (РЛУ) . . . . . . . . . . . . . . . . . . . 9
3.2 Микропроцессорная часть . . . . . . . . . . . . . . . . . . . . . . . . . 11
4 Обоснование алгоритма работы устройства . . . . . . . . . . . . . . . . 13
5 Разработка управляющей программы . . . . . . . . . . . . . . . . . . . . 15
5.1 Схема алгоритма . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.2 Пояснения к программе . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
6 Заключение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Список использованной литературы . . . . . . . . . . . . . . . . . . . . . . . 19
Приложение А. Листинг управляющей программы . . . . . . . . . . . . . 20
Приложение Б. Карта прошивки памяти программ . . . . . . . . . . . . 22
ФЭТ КП.XXXXXX.006 Э3 Плата микроконтроллера.
Схема электрическая принципиальная . . . 23
ФЭТ КП.XXXXXX.006 ПЭ3
Плата микроконтроллера. Перечень элементов . . . . . . . . . . . . . . . . 24
ВВЕДЕНИЕ
Микропроцессоры как основа совершенно нового поколения интеллектуальных машин встречаются повсюду: в детских игрушках, карманных калькуляторах для бытовых целей, промышленных роботах, бытовых электронагревательных приборах и т. д. В настоящее время микропроцессорные системы широко внедряются во все сферы учебной, научной и производственной деятельности. Вследствие создания программируемого элемента, называемого микропроцессором, теперь можно рассчитывать на ускорение разработок искусственного интеллекта.
Электронные вычислительные машины широко используются с 50-х годов. Вначале это были ламповые и дорогие машины, предназначенные для административно-управленческих целей, доступные только крупным предприятиям. Из-за появления нового элемента - микропроцессора структура и формы вычислительных машин изменились. Микропроцессор - это интегральная схема (ИС), обладающая такой же производительностью при переработке информации, что и большая ЭВМ. Более точно - это очень сложное программируемое устройство малых размеров, представляющее собой большую интегральную схему (БИС). Электронные вычислительные машины работают в соответствии - с загружаемой в них программой, микро-ЭВМ действуют по такому же принципу, она содержит микропроцессор и, по меньшей мере, один какой-либо либо тип полупроводниковой памяти.
Реклама

Выполнение курсового проекта требует от будущего специалиста по промышленной электроники обязательных знаний не только о микропроцессорах и микропроцессорных системах в общем, т. е. сведениями о её аппаратной и программной частях, но и различных аспектов архитектуры, функционирования и применения микропроцессоров и микропроцессорных систем. Курсовой проект позволит студентам укрепить знания в области цифровой и микропроцессорной техники, почувствовать себя специалистами в области разработки этой аппаратуры и её программного обеспечения.
Кроме того, проектирование микропроцессорных систем наряду с организацией центрального процессора, подключением памяти и устройств ввода/вывода информации связано с разработкой прикладных программ на языке ассемблера используемого микропроцессора. Для успешного и эффективного построения микропроцессорных систем необходимо в совершенстве знать их программные возможности и предоставляемые ими средства. На этапе разработки прикладной программы используются различные компьютерные средства поддержки проектирования: кросс-трансляторы, эмуляторы, редакторы текстов, программаторы.
При выполнении курсового проекта по ЦиМПТ прямые интересы проектировщика электронного устройства замыкаются на решении специальных технических проблем: математического моделирования технического объекта, его эксплуатации и управления, разработки различных видов технологии и оборудования и т. д. В проекте раскрываются сложные вопросы структуры, функционирования, принципов построения аппаратных и программных средств микропроцессоров и микропроцессорных систем.
В курсовом проекте по ЦиМПТ микропроцессор является основой для построения электронного устройства с заданными в техническом - задании функциональными свойствами. Применение однокристальных микроконтроллеров в цифровых электронных устройствах обеспечивает достижение исключительно высоких показателей эффективности при низкой стоимости. В данном курсовом проекте таким электронным устройством является радар для ГИБДД с цифровой индикацией скорости автомобиля. Измерения скорости движущегося автомобиля основано на использовании эффекта Доплера. Суть эффекта заключается в следующем. Если источник (излучатель) электромагнитных волн (ЭМВ) и их приёмник движутся относительно друг друга, т. е. если расстояние между ними увеличивается или уменьшается, то приёмник будет воспринимать частоту, отличную от частоты источника, появляется доплеровский сдвиг частот. Естественно, что сдвига частот не будет, если расстояние между источником и приёмником не меняется. Самое главное то, что сдвиг частот жёстко связан со скоростью движущегося объекта.
Реклама

Необходимо заметить, что прямой источник ЭМВ (радар) направленно излучает их на движущейся объект (автомобиль), а он, согласно принципу Гюйгенса, является источником вторичных ЭМВ. Это происходит за счёт эффекта отражения ЭМВ. Приёмник на этом же радаре улавливает отражённые от автомобиля ЭМВ, а по доплеровскому сдвигу частот микропроцессорная система определяет скорость авто и выводит её на трёхразрядный индикатор в км/ч.
Кроме того, микропроцессорной системой будет предусмотрена возможность контролировать превышение водителем скорости, задаваемой на трёх программных переключателях. В этом случае система осуществит фотографирование автомобиля, превысившего допустимую скорость движения. Фотоаппаратура должна иметь достаточно высокую чувствительность для того, чтобы фотоснимок обладал высоким качеством, так как на нём должен быть виден государственный номер автомашины.
Такого типа радары широко используются органами ГИБДД для измерения и контроля скорости движущихся автомобилей. Такие радары могут применятся как в стационарном варианте: излучатель, приёмник, микропроцессорная система, аппаратура для фотосъёмки, работающих автономно, независимо от человека; так и передвижном варианте. В этом случае радиолокационные приборы могут монтироваться на кузове автомобиля сотрудников ГИБДД, а микропроцессорная система - в салоне этого автомобиля, при этом необходимость в фотосъёмке автомашины отпадает, так как контроль за превышением водителями максимально допустимой скорости осуществляет непосредственно сотрудник ГИБДД, тут же останавливающий водителя, превысившего скорость.
1.
Конкретизация технического задания
Задано, что разрабатываемым цифровым устройством является цифровой спидометр для органов государственной автомобильной инспекции (радиолокационный прибор с цифровой индикацией скорости). Контролируемая скорость должна быть не менее 200 км/ч, для измерения скорости можно использовать эффект Доплера. Проектируемое устройство должно измерять скорость автомобиля, индицировать его в км/ч очевидно на трёх семисегментных индикаторах, осуществлять контроль за превышением скорости и осуществлять фотосъёмку автомашины, превысившей максимально допустимую скорость. Допустимую скорость можно задавать на программных переключателях.
Применение здесь микроконтроллера полностью оправдано, т. к. скорость автомобиля математически выражается через доплеровский сдвиг частоты .
В передвижном варианте радара особых требований к рабочему температурному режиму не предъявляется, т. к. микропроцессорная часть проектируемого устройства размещается внутри салона автомобиля, снабжённого отопительной установкой. В стационарном варианте необходимо обеспечить температурный режим, не нарушающий работоспособность микропроцессорной системы.
Предполагаемое конструктивное исполнение проектируемого устройство - отдельное изделие.
2.
Разработка функциональной схемы устройства
3.1
Радиолокационная установка (РЛУ)
Радиолокационные приборы излучатель и приёмник могут быть устроены по супергетеродинной схеме, основанной на двухканальном, амплитудно-импульсном методе, так, как показано на рисунке 3.1. На этом рисунке приведён пример доплеровской радиолокационной установки с непрерывным излучением.
Эхо сигнал от движущейся цели принимается приемниками канала 1 и канала 2. После преобразования в первом канале первичная частота:
fпч = fпр ± Fd1, соответственно во втором канале fпч = fпр ± Fd2, где Fd1 и Fd2 – доплеровские добавки, а fпр – первоначальная частота, задающаяся гетеродинами 1 и 2 каналов.
Сигналы с выходов каналов складываются в сумматоре, где выделяется частота биения Fб = Fдоп = Fd1 – Fd2. Следовательно:
Рисунок 3.1 - Функциональная схема радиолокационной установки , где с – скорость света.
Рассмотрим подробную работу схемы РЛУ.

Рисунок 3.2. – Тракт зондирующего импульса
Тракт зондирующего импульса рис 3.2 предназначен для формирования высокочастотных зондирующих импульсов из маломощного непрерывного сигнала. Непрерывный сигнал с кварцевого генератора блока перестройки частот П1 усиливается усилителем мощности (в блоке П1 задается частота fзад). В смесителях происходит сложение несущей частоты f1 в первом канале и f2 во втором канале с частотой fзад. Затем образованные частоты складываются в блоке сложения мощностей для последующего усиления в пятикаскадной усилительной цепочке. Ферритовый циркулятор служит для переключения РЛУ с приема на передачу и обратно.
 |
Рисунок 3.3. – Тракт эхо сигнала Тракт эхо сигнала (сигнала поступающего от движущегося автомобиля) рис 3.3. выполнен по супергетеродинной схеме с двойным преобразованием частоты. Отраженные от автомобиля сигналы f1 ± Fd1 и f2 ± Fd2 поступают на фильтры первого и второго каналов через переключатель сигналов и усилитель высоких частот. В этих фильтрах происходит разделение сигнала на два канала, после этого в первых смесителях под действием частоты fзад выделяются промежуточные частоты fпр. Дальше эхо сигнал поступает на вторые смесители где формируется оптимальная ширина пропускания. В сумматоре происходит совмещение двух импульсов и компенсация помех. На выходе сумматора имеем сигнал с частотой Доплера Fдоп.
Данная схема РЛУ свободна от таких недостатков как малочувствительность, потому что в ней отсутствуют тепловые и дробовые шумы, а так же мерцательные шумы, вносимые полупроводниковыми и электронными приборами. Мощность мерцательных шумов обратно пропорциональна частоте, и именно на низких доплеровских частотах шумы кристаллического смесителя могут значительно снизить чувствительность приёмника.
3.2
Микропроцессорная часть
Устройство можно спроектировать с применением однокристального микроконтроллера семейства МК48. Микросхемы семейств МК48 и МК51 получили наибольшее распространение среди микросхем такого класса. Использование микросхемы DD3 К1830ВЕ35 в данном случае - самый экономичный вариант реализации устройства. Функциональная схема устройства изображена на рисунке 3.4. Прикладную программу можно разместить во внешней памяти программ - микросхеме DD9 ПЗУ К556РТ5. Адрес очередной ячейки ПЗУ фиксируется во внешнем регистре DD4. Микроконтроллер содержит на кристалле три 8-разрядных порта. Линии порта P1 и линии P2.4-P2.7 используются для трёхразрядной индикации скорости (км/ч). Для индикации можно использовать тройку светодиодных семисегментных цифровых индикаторов HG1..HG3, например, типа АЛС324А. Индикаторы подключаются к портам микроконтроллера через дешифраторы DD6..DD8 (514ИД1), преобразующие двоично-десятичное содержимое портов в коды управления цифровыми индикаторами.
В данном варианте решения предполагается использование расширителя ввода/вывода DD5 - микросхемы К580ВР43. Расширитель ввода/вывода обеспечивает подключение четырёх дополнительных четырёхразрядных портов P4-P7. Порты P4, P5, P6 используются для ввода в микроконтроллер инверсного двоично-десятичного кода максимально допустимой скорости на данном участке дороги, для этого к ним подключаются три программных переключателя SA1..SA3 типа ПП10-ХВ, на лимбах которых и задаётся максимальная скорость. Линия 0 порта P7 используется для подачи управляющего импульса на аппаратуру фотосъёмки, которая запускается при появлении на линии P7.0 нулевого уровня.
У микроконтроллера задействованы входы T0 и T1. Со входом Т1 связан фотодатчик. Фотоэлемент формирует на входе T1 импульс с нулевым уровнем в тот момент, когда автомобиль проезжает мимо него, это используется для того, чтобы сделать фотоснимок автомобиля именно в нужный момент, если водитель превысил максимально допустимую скорость.
На вход микроконтроллера T0 поступают импульсы с уровнями ТТЛ с частотой Доплера. Для согласования сигнала с приёмного устройства радиолокационного прибора со входом T0 микроконтроллера используется цепочка, состоящая из триггера Шмита DD1 и счётного триггера DD2. Амплитуда напряжения синусоидальной формы с частотой Доплера на выходе усилителя приёмного устройства радиолокационного прибора достигает уровня, достаточного для срабатывания триггера Шмита. Счётный триггер формирует сигнал на тестируемом входе микроконтроллера.
4
Обоснование алгоритма работы устройства
Так как измерение скорости основано на эффекте Доплера, необходимо связать доплеровский сдвиг частоты отражённого сигнала со скоростью автомобиля (в м/с):
для перевода скорости в км/ч умножим её на 3.6:
 (1) (1)
Несущие частоты излучателей f1 и f2 выбираем равными 200 МГц и 100 МГц соответственно. Подставив в выражение (1) значение скорости света  м/с и несущие частоты f1 и f2, получим: м/с и несущие частоты f1 и f2, получим:  . Частоту Доплера будем измерять методом подсчёта числа импульсов N генератора тактовых импульсов с периодом следования t : . Частоту Доплера будем измерять методом подсчёта числа импульсов N генератора тактовых импульсов с периодом следования t :

таким образом, искомая скорость автомобиля в км/ч: 
Выбираем t = 0.27 мс, тогда  . Для работы с целыми числами сначала вычислим . Для работы с целыми числами сначала вычислим  , а затем отбросим младшую цифру, при этом добавлением 5 производится округление. , а затем отбросим младшую цифру, при этом добавлением 5 производится округление.
Для скорости автомобиля от 11 до 216 км/ч (3 ... 60 м/с), число N будет находиться в диапазоне от 1851 до 92.
Возвращаясь к функциональной схеме, нулевой уровень будем использовать для измерения частоты Доплера Fд, а при единичном - будем производить вычисление скорости Va и вывод её значения на индикаторы. Далее нужно производить контроль измеренной скорости автомобиля и передавать управление фотосъёмочной аппаратуре, если водитель автомобиля нарушил правила дорожного движения, превысив скорость. При этом фотоснимок будет сделан в тот момент, когда фотодатчик сформирует сигнал на входе T1. Активным является нулевой его уровень, коммутируемый на линию P7.0 для срабатывания фотоаппарата.
5
Разработка управляющей программы
5.1
Схема алгоритма
Схема алгоритма работы управляющей программы изображена на рисунке 5.1. После подачи сигнала сброса SR производится настройка портов P1 и P2 на вывод информации, осуществляется загрузка регистров R1-R0 первого банка регистров общего назначения микроконтроллера (РОН) инверсным двоично-десятичным числом максимально допустимой скорости, набранным на портах P6,P5,P4. После сброса на линии P7.0 (фотосъёмка) окажется неактивный единичный уровень.
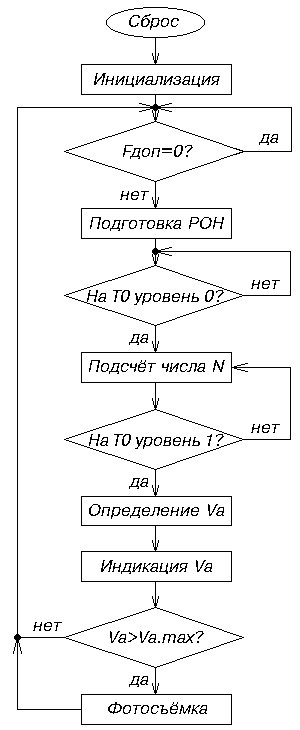
Рисунок 5.1 - Схема алгоритма управляющей программы
Затем микроконтроллер переходит в состояние ожидания импульса на своём входе T0 (см. рисунок 5.1). После его появления осуществляется подготовка РОНов используемого нулевого банка. Далее, дождавшись нулевого уровня импульса, микроконтроллер осуществляет измерение Fдоп
, то есть определение числа импульсов “генератора” тактовых импульсов с фиксированным периодом следования. ”Генератор” тактов основан на использовании временной задержки на время t = 0.27 мс. Подсчёт количества таких импульсов проводится в течении всей длительности нулевого уровня T0. Далее, в соответствии с подсчитанным числом N определяется скорость, при этом деление выполняется методом подсчёта количества сложений числа N до превышения суммой (S) числа  . Затем найденная скорость выводится на индикаторы. . Затем найденная скорость выводится на индикаторы.
Вычисленная на предыдущем этапе работы программы скорость сравнивается с максимально допустимой скоростью. В случае превышения скорости микроконтроллер ждёт появления на входе T1 импульса (нулевого уровня при срабатывании фотодатчика) и коммутирует его на линию P7.0, при этом производится фотосъёмка автомашины.
Если скорость не превышена (или после фотосъёмки), работа программы повторяется с момента ожидания микроконтроллером импульсов на входе T0.
5.2
Пояснения к программе
Листинг управляющей программы приведён в приложении А. Программа организована в виде нескольких подпрограмм как законченных функциональных модулей, это существенно улучшает восприятие текста программы при чтении. Основная программа осуществляет инициализацию, подготовку РОНов, вывод скорости в порты P4,P5,P6 для индикации, сравнение найденной скорости с максимальной путём побайтного сложения значения скорости с инверсным значением максимальной скорости и отслеживания признака переноса. Подпрограмма N осуществляет подсчёт числа N по нулевому уровню. Подпрограмма Y подсчитывает по заданному N число Y на протяжении единичного уровня импульса. Подпрограмме PHOTO передаётся управление, если полученная скорость больше максимально допустимой. Все вычисления производятся с использованием двоично-десятичного представления N(R1,R0) и Y(R6,R5). При этом переменные N и Y имеют двухбайтовый формат, то есть хранятся в двух РОНах. Накопитель S, использующийся при выполнении операции деления, имеет трёхбайтовый формат и хранится в РОНах R4,R3,R2. Сложение числа N в накопителе идёт до тех пор, пока в пятом бите старшего регистра S (R4) не появится 1, что соответствует числу  (если все остальные биты - 0). (если все остальные биты - 0).
Определим значение константы Z, которая загружается в регистр R7 для реализации фиксированной временной задержки t = 0.27 мс:  мс, мс,
2.5 мкс - время одного машинного цикла при подключении кварца частоты 6 МГц;
14 - число машинных циклов выполнения команд подпрограммы N, которые надо учесть наряду с основной задержкой в счётчике R7.
Отсюда Z=47=2Fh.
Отметим, что для реализации вычислений задействованы десять РОНов, аккумулятор и одна ячейка стека микроконтроллера. Основные преобразования реализуются в аккумуляторе с использованием команд сложения и десятичной коррекции. Многобайтовые переменные формируются путём последовательного преобразования отдельных байтов.
6
Заключение
Микропроцессоры и микропроцессорные системы являются основой построения электронных устройств с заданными функциональными свойствами. Решающими факторами при проектировании таких устройств являются удобство практической эксплуатации и новый набор - качественных характеристик (более высокое быстродействие, точность, новые функциональные возможности) по сравнению с домикропроцессорным вариантом реализации подобного устройства.
Реализация электронного устройства в данном курсовом проекте - цифрового радара ГИБДД - на однокристальном микроконтроллере серии МК48 К1830ВЕ35 оказалась самым экономичным вариантом.
Такого типа радары широко используются органами ГАИ для измерения и контроля скорости движущихся автомобилей. Полезной возможностью является выбор варианта исполнения цифрового радара. В передвижном варианте необходимыми частями устройства являются РЛУ и микропроцессорная часть. В стационарном варианте в комплект, кроме того, входят фотодатчик и фотосъёмочная аппаратура. В таком варианте изделие функционирует автономно и не требует постоянного вмешательства человека.
Данный курсовой проект позволил сделать серьёзные упражнения в применении знаний, полученных в процессе изучения дисциплины “Микропроцессорные устройства и системы”.
Список литературы
1 ОС ТАСУР 6.1-97. Работы студенческие учебные и выпускные квалификационные. Общие требования и правила оформления.
2 Шарапов А. В. Микропроцессорные устройства и системы. Методические указания к выполнению курсового проекта. - Томск: ТУСУР, 1998. - 39 с.
3 Шарапов А. В. Примеры решения схемотехнических задач. Учебное пособие. - Томск: ТИАСУР, 1994. - 141 с.
4 Шарапов А. В. Цифровая и микропроцессорная техника: Учебное пособие. 2-е изд., перер. и доп. - Томск: Изд-во Том. Ун-та, 1997. - 108 с.
5 Токхайм Р. Микропроцессоры: Курс и упражнения/ Пер. С англ., под ред. В. Н. Грасевича. - М.: Энергоатомиздат, 1988. - 336 с.
6 Белоцерковский Г. Б. Основы радиолокации и радиолокационные устройства. М.: Сов. Радио, 1975. - 336 с.
Приложение А
Листинг управляющей программы
Основная программа:
1 0000 99 00 MAIN: ANL P1,#00H ; üПогасить индикаторы и
2 0002 9A 0F ANL P2,#0FH ; þподготовить порты к выводу.
3 0004 D5 SEL RB1 ; ü
4 0005 0E MOVD A,P6 ; ½
5 0006 03 F0 ADD A,#0F0H ; ½
6 0008 A9 MOV R1,A ; ½Считать в регистры R0-R1
7 0009 0D MOVD A,P5 ; ýпервого банка РОНов инверсное
8 000A 47 SWAP A ; ½двоично-десятичное значение
9 000B A8 MOV R0,A ; ½максимальной скорости.
10 000C 0C MOVD A,P4 ; ½
11 000D 68 ADD A,R0 ; ½
12 000E A8 MOV R0,A ; ½
13 000F C5 SEL RB0 ; þ
14 0010 26 10 M1: JNT0 $ ; Ожидание появления импульса.
15 0012 27 CLR A ; ü
16 0013 A8 MOV R0,A ; ú
17 0014 A9 MOV R1,A ; úПодготовка регистров
18 0015 AA MOV R2,A ; ý к вычислениям.
19 0016 AB MOV R3,A ; ú
20 0017 AC MOV R4,A ; ú
21 0018 AE MOV R6,A ; ú
22 0019 BD 05 MOV R5,#05H ; þ
23 001B 36 1B JT0 $ ; Ожидание нулевого уровня T0.
24 001D 14 42 CALL N ; Вычисление числа N=(R1,R0).
25 001F 14 53 CALL Y ; Вычисление Y»10×Vа=(R6,R5).
26 0021 FD MOV A,R5 ; ü
27 0022 47 SWAP A ; ýПоместить в R5 младшую
28 0023 53 0F ANL A,#0FH ; úцифру значения скорости.
29 0025 AD MOV R5,A ; þ
30 0026 FE MOV A,R6 ; ü
31 0027 47 SWAP A ; úВ R5 две младшие цифры
32 0028 53 F0 ANL A,#0F0H ; ýзначения скорости.
33 002A 6D ADD A,R5 ; þ
34 002B AD MOV R5,A ; Вывести младшие цифры
35 002C 39 OUTL P1,A ; скорости на индикаторы.
36 002D FE MOV A,R6 ; üВыделить в старшем полубайте
37 002E 53 F0 ANL A,#0F0H ; þR6 старшую цифру скорости.
38 0030 3A OUTL P2,A ; Старшую цифру на индикатор.
39 0031 47 SWAP A ; üВ R6 старшая цифра
40 0032 AE MOV R6,A ; þзначения скорости.
41 0033 D5 SEL RB1 ; üСравнить старшие цифры
42 0034 69 ADD A,R1 ; ýVа и Vа.max и перейти на M0,
43 0035 C5 SEL RB0 ; úесли Vа>Vа.max.
44 0036 F6 3E JC M0 ; þ
45 0038 FD MOV A,R5 ; ü
46 0039 D5 SEL RB1 ; ú Сравнить младшие цифры47 003A 68 ADD A,R0 ; ý Vа и Vа.max и перейти на N0,
48 003B C5 SEL RB0 ; ú если Vа<Vа.max.
49 003C E6 40 JNC N0 ; þ
50 003E 14 6F M0: CALL PHOTO ; Фотосъёмка.
51 0040 04 10 N0: JMP M1 ; Повторить основную программу.
Подпрограмма измерения Tдоп (вычисления N):
52 0042 28 N: XCH A,R0 ; ü
53 0043 03 01 ADD A,#01H ; ú
54 0045 57 DA A ; ú
55 0046 28 XCH A,R0 ; ýИнкрементирование накопителя
56 0047 29 XCH A,R1 ; úN=(R1,R0).
57 0048 13 00 ADDC A,#00H ; ú
58 004A 57 DA A ; ú
59 004B 29 XCH A,R1 ; þ
60 004C BF 2F MOV R7,#2FH ; üВременная задержка 0.17 мс.
61 004E EF 4E DJNZ R7,$ ; þ
62 0050 26 42 JNT0 N ; Пока на T0 нулевой уровень.
63 0052 83 RET ; Выход из подпрограммы.
Подпрограмма вычисления Y»10×Vа=(R6,R5).
64 0053 2A Y: XCH A,R2 ; ü
65 0054 68 ADD A,R0 ; ú
66 0055 57 DA A ; ú
67 0056 2A XCH A,R2 ; úФормирование S в двоично-
68 0057 2B XCH A,R3 ; ýдесятичном накопителе
69 0058 79 ADDC A,R1 ; ú(R4,R3,R2).
70 0059 57 DA A ; ú
71 005A 2B XCH A,R3 ; ú
72 005B 2C XCH A,R4 ; ú
73 005C 13 00 ADDC A,#00H ; ú
74 005E 57 DA A ; ú
75 005F B2 6E JB5 M2 ; úЗакончить сложение N c S,
76 0061 2C XCH A,R4 ; þесли S>=200000.
77 0062 2D XCH A,R5 ; ü
78 0063 03 01 ADD A,#01H ; ú
79 0065 57 DA A ; ú
80 0066 2D XCH A,R5 ; úФормирование Y в двоично-
81 0067 2E XCH A,R6 ; ýдесятичном накопителе
82 0068 13 00 ADDC A,#00H ; ú(R6,R5)
83 006A 57 DA A ; ú
84 006B 2E XCH A,R6 ; þ
85 006C 04 53 JMP Y ; Продолжить вычисление Y.
86 006E 83 M2: RET ; Выход из подпрограммы.
Подпрограмма управления фотосъёмкой:
87 006F 56 6F PHOTO: JT1 $ ; Ожидание импульса фотодатчика.
88 0071 23 FE MOV A,#FEH ; üВывод 0 в линию P7.0.
89 0073 9F ANLD P7,A ; þ
90 0074 46 74 JNT1 $ ; Ожидание конца импульса.
91 0076 23 01 MOV A,#01H ; üВывод 1 в линию P7.0.
92 0078 8F ORLD P7,A ; þ
93 0079 83 RET ; Выход из подпрограммы.
Приложение Б
Карта прошивки памяти программ
0: 1: 2: 3: 4: 5: 6: 7: 8: 9: A: B: C: D: E: F:
0000: 99 00 9A 0F D5 0E 03 F0 A9 0D 47 A8 0C 68 A8 C5
0010: 26 10 27 A8 A9 AA AB AC AE BD 05 36 1B 14 42 14
0020: 53 FD 47 53 0F AD FE 47 53 F0 6D AD 39 FE 53 F0
0030: 3A 47 AE D5 69 C5 F6 3E FD D5 68 C5 E6 40 14 6F
0040: 04 10 28 03 01 57 28 29 13 00 57 29 BF 2F EF 4E
0050: 26 42 83 2A 68 57 2A 2B 79 57 2B 2C 13 00 57 B2
0060: 6E 2C 2D 03 01 57 2D 2E 13 00 57 2E 04 53 83 56
0070: 6F 23 FE 9F 46 74 23 01 8F 83 FF FF FF FF FF FF
0080: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0090: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00A0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00B0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00C0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00D0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00E0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00F0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
| 
|
| ФЭТ КП.XXXXXX.007 Э3
|
| МИКРОКОНТРОЛЛЕР
Схема электрическая
Принципиальная
|
Лист
|
Масса
|
Масшт
|
| Лист
|
№докум
|
Подпись
|
Дата
|
| Разработ.
|
Ощепков
|
| Проверил.
|
Шевелев
|
| Т. контр.
|
Лист
|
Листов 1
|
| ТУСУР ФЭТ ПрЭ гр.367-3
|
| Н.контр.
|
| Утв.
|
| Поз.
Обозначен
|
Наименование
|
Кол.
|
Примечание
|
Резонатор кварцевый
|
BQ1
|
РК-160МА-14БП-12000кГц-В ОД 0.338.003 ТУ
|
1
|
Конденсатор
|
C1, C2, C3
|
К73-24-100В-0.68нФ±10% ГОСТ 5.623-70
|
3
|
Резистор
|
R1
|
МЛТ-0.125-15кОм±1.0% ОЖО.467.404 ТУ
|
1
|
| Микросхемы
|
DD1
|
K555ТЛ1 5К 1,673,006ТУ11
|
1
|
| DD2
|
К555ТМ2 6К 0,348,006ТУ14
|
1
|
| DD3
|
К1830ВЕ35 8П 0,375,006ТУ18
|
1
|
| DD4
|
К580ИР82 4В 0,244,006ТУ55
|
1
|
| DD5
|
К580ВР43 3М 2,345,005ТУ32
|
1
|
| DD6 – DD8
|
К514ИД1 6К 0,478,006ТУ47
|
3
|
| DD9
|
К556РТ5 3Р 1,394,006ТУ99
|
1
|
| Индикаторы
|
| HG1 - HG3
|
АЛС324А аА 0,336367ТУ
|
3
|
| Вилки
|
| XS1 – XS3
|
ОНП – КГ – 26 – 64/73xВ 0.324.027ТУ
|
3
|
| ФЭТ КП.XXXXXX.007 ПЭ3
|
| Лист
|
№докум.
|
Подп.
|
Дата
|
| Разработ.
|
Ощепков
|
МИКРОКОНТРОЛЛЕР
перечень
элементов
|
Лиcт
|
Лист
|
Листов
|
| Провер.
|
Шевелев
|
1
|
| Т.контр.
|
ТУСУР ФЭТ ПрЭ гр.367-3
|
| Н.контр.
|
| Утв.
|
|


