Введение
Строительству в нашей стране уделяют особое внимание, так как оно в значительной степени обеспечивает развитие других отраслей народного хозяйства и повышает уровень благосостояния населения.
Данный учебник написан в соответствии с программой курса для специальности «Промышленное и гражданское строительство». Первое издание книги вышло в 1965 г., второе — в 1971 г. Третье издание книги значительно переработано и до' полнено на основе достижений науки и техники последних лет; все физические величины параллельно с системой единиц МКГСС даны в Международной системе единиц СИ.
Авторами приведен минимум материала, которого достаточно для того, чтоб студенты могли изучить принципы устройства и работы машин, физическую сущность явлений, происходящих при их эксплуатации, технические параметры машин и технико-экономические показатели их работы, а также на практике правильно выбрать машину для выполнения заданных технологических операций, оценить влияние отдельной машины и условий работы на ее производительность и т. д.
Курс «Строительные машины» содержит общие вопросы конструкций строительных машин, где излагаются основные характеристики отдельных машин — проходимость, маневренность и др., а также системы управления, силовые установки, ходовая часть машин, методы расчета тяговых усилий, определение сил сопротивления рабочих органов при разрушении грунтов и пород и т. д.
На основе опыта использования этого учебника в различных вузах, а также требований, которые предъявляют на данном этапе строители, авторы в третьем издали изменили объемы некоторых разделов: сокращен объем материала по машинам для земляных работ, увеличен объем материала по ручным машинам, так как они получают все большее применение (ими пользуются около 60% строителей и монтажников).
Для облегчения изучения курса студентами заочных вузов в учебник включены контрольные вопросы.
Общие сведения о деталях машин
Машины и механизмы состоят из отдельных деталей. Деталь представляет собой одно целое (вал, винт и др.). Группа деталей, работающих в комплексе и объединенных общим назначением, называется узлом (коробка передач, редуктор и др.). Различают детали простые (гайка, шпонка, винт и т. д.) и сложные (коленчатый вал, корпус ковша экскаватора, корпус редуктора).
В курсе деталей машин изучаются детали и узлы общего назначения, встречающиеся почти во всех машинах: болты, валы, муфты, механические передачи и др.
Реклама

Эффективная работа машин, срок их службы определяются прочностью, жесткостью, виброустойчивостью, износостойкостью, теплостойкостью и надежностью деталей этих машин.
Прочность
— свойство детали сопротивляться разрушению под действием на нее внешних нагрузок. Прочность детали зависит от характера приложения нагрузки, от формы детали, а также от материала, из которого она изготовлена.
На детали могут действовать нормальные, случайные и аварийные нагрузки. Нормальные нагрузки по величине и характеру соответствуют паспортным условиям работы машины. По ним ведется расчет на долговечность. Случайные нагрузки — наименее выгодные сочетания одновременно действующих на деталь нагрузок, которые возможны во время работы при исправных механизмах, правильном управлении и эксплуатации машины в очень тяжелых условиях; они вызывают максимальные напряжения в детали. Расчет детали на прочность ведут, исходя из этих нагрузок. Размеры, форма детали, материал и его обработка должны быть такими, чтобы напряжения, возникающие при работе детали, от этих нагрузок не превосходили допустимых величин. Аварийные нагрузки могут возникнуть в случае неисправной работы механизмов или нарушения правил управления и эксплуатации. По этим нагрузкам рассчитывают предохранительные устройства с тем, чтобы нагрузка на деталь не превосходила случайной нагрузки.
С точки зрения изменения напряжений во времени их можно разделить на постоянные и переменные (рис. 1.1). Переменные напряжения могут быть симметричными (рис. 1.1,б), асимметричными, знакопостоянными (рис. 1.1, в), знакопеременными (рис. 1.1, г) или пульсирующими (рис. 1.1, д).
Постоянное по времени напряжение (рис. 1.1 а) характеризуется максимальным значением s =
sтах
.
Переменное по времени напряжение характеризуется следующими видами напряжений: s
тах
—максимальным; s
тin
— минимальным; sт
= sтах
+ sтin
/ 2 — средним; sт
= sтах -
sтin
/ 2 — амплитудным, а
также r=
sтах /
sтin
— характеристикой цикла. Для симметричного цикла (рис. 1.1, б):
sтах
> 0; sтin
< 0; sтах
= sтin
; sт
= 0; sа
= sтах
, r
= — 1.
Для несимметричного знакопостоянного цикла (рис. 1.1, в):
sтах
> 0; sтin
> 0; sтах
> sтin
; sт
> 0; sа
= 0, r
> 1.
Для несимметричного знакопеременного цикла (рис. 1.1, г):
sтах
> 0; sтin
< 0; sа
> 0 или sa
< 0 ; sт
> 0 или sт
< 0 ; r
< 0. Для пульсирующего цикла (рис. 1.1, д):
Реклама

sтах
> 0; sтin
= 0; sт
> 0; sа
> 0 ; r
= 0.

Рис. 1.1. Графики изменения напряжений
Полученные фактические напряжения в расчетном сечении детали следует сравнить с допустимыми. Необходимо, чтобы соблюдалось основное условие прочности:
s £ [s] и t £ [t],
где [s] = sпред/n
; [t] = tпред/n
, [s], [t] - допускаемые нормальное и касательное напряжения; sпред tпред - предельные нормальное и касательное напряжения; п
— коэффициент запаса прочности.
п = п1
п2
п3
,
где п1
— коэффициент, учитывающий однородность физикомеханических свойств материала (для стали п1
= 1,2 ¸ 1,5; для чугуна п
1
=1,5 ¸ 2,5); п
2
—коэффициент, учитывающий достоверность определения расчетных нагрузок и напряжений (п
2
= 1,0 ¸ 1,5); п
3
— коэффициент, учитывающий специфические условия работы; выбирается в зависимости от степени ответственности детали. Для узлов, нарушение работы которых не приводит к крупным материальным затратам, п3
=
1,05 ¸ 1,15, в противном случае п3
= 1,15 ¸ 1,5.
Для машин, работа с которыми опасна для жизни, коэффициент запаса прочности регламентирован нормами Гостехнадзора.
Жесткость
детали характеризуется величиной ее упругой деформации под влиянием действующих на нее нагрузок. Для обеспечения необходимой жесткости материал и размеры детали выбирают такими, чтобы величина ее деформации не превышала допустимую, иначе работа машины нарушится. Например, при недостаточной жесткости вала, т. е. при его изгибе, может нарушиться работа зубчатого зацепления.
Различают собственную жесткость деталей, когда деформируется весь объем материала (изгиб вала), и контактную жесткость, когда деформируются поверхностные слои материала (смятие поверхностей зубьев зубчатых колес в местах их контакта).
Потеря устойчивости
характеризуется необратимой деформацией детали или конструкции (фермы), они теряют первоначальную форму, становятся неработоспособными.
Виброустойчивость
— работоспособность деталей в условиях вибрации. Вибрации быстро выводят детали из строя вследствие усталостных напряжений, поэтому при проектировании машин, на которых устанавливают вибраторы, особое внимание уделяют расчету деталей на виброустойчивость. Одновременно подбирают условия, при которых предотвращается возможность появления вибрации в тех деталях, где они не требуются.
Износостойкость
— свойство материала оказывать сопротивление изнашиванию. Изнашивание — это процесс постепенного изменения поверхностных размеров деталей, происходящего при трении. Износ — результат изнашивания в виде изменения размеров детали и свойств ее поверхности.
Основные виды изнашивания: 1) механическое — абразивное изнашивание при хрупком разрушении поверхности; 2) молекулярномеханическое — схватывание поверхностей двух сопряженных деталей и проникновение металла одной детали на другую; 3) коррозионномеханическое — результат воздействия агрессивной среды на поверхность деталей; 4) молекулярно-тепловое — возникает в результате трения между деталями, а также воздействия тепловых процессов, которые происходят в отдельных узлах машин.
Износ снижает прочность и жесткость, долговечность и надежность детали, может увеличить динамические нагрузки вследствие увеличения зазоров в деталях. Износ уменьшается при смазке трущихся поверхностей, снижении давления между ними, предохранении деталей от попадания на трущиеся поверхности абразивных частиц и агрессивных сред.
Надежность
— свойство изделия выполнять заданные функции, сохраняя свои эксплуатационные показатели в заданных пределах втечение требуемого промежутка времени или требуемой наработки. Надежность можно определять для машины в целом или для отдельных ее агрегатов, узлов и деталей. Для оценки надежности выбирают различные показатели: число отказов в работе, средний срок службы в часах, число километров пробега и др. Если, например, для автомобилей установлен пробег 100 000 км, а средне-статистический пробег для этого типа машин равен 95 000 км, то коэффициент надежности этих автомобилей R
= 0,95.
Согласно теории вероятности коэффициент надежности сложного изделия R
выражается произведением коэффициентов надежности отдельных составляющих элементов:
п
R = R
1
, R2
, R3
, ..., Ri=
П
Ri.
l
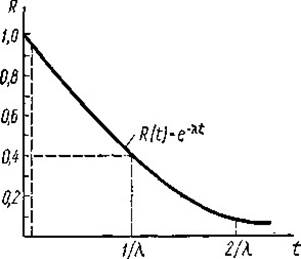
Рис. 1.3. Кривая изменения коэффициента надежности в зависимости от времени эксплуатации
Если, например, система включает 100 элементов с одинаковым
коэффициентом надежности каждого R
i
=0,99, то коэффициент надежности
100
системы R
= 0,99 = 0,37. Такая система не является работоспособной. Коэффициент надежности R
снижается с увеличением времени эксплуатации по экспоненциальному закону (рис. 1.3). Средняя наработка на отказ т
— величина, обратная интенсивности отказов, т. е. т
= 1/l.
Если t
= 1/l, то R
= 1/е » 0,37; при t
= 0,1/l R
» 0,9; при t
= 0,01/l R =
0,99.
Ремонтоспособность
характеризуется отношением времени простоя в ремонте к рабочему времени, доступностью узлов и деталей для осмотра или замены, процентом деталей и узлов, которые взаимозаменяемы с запасными деталями. Чем больше этот процент, в особенности целых узлов (ремонтные узлы), тем меньше время простоев в ремонте.
Соединение деталей
Различают соединения разъемные и неразъемные.
Разъемные соединения (резьбовые, штифтовые, клиновые, клем-мовые, шпоночные, шлицевые) позволяют разбирать сборочную единицу без повреждения деталей.
Неразъемные соединения (заклепочные, сварные и условно прессовые) не позволяют разбирать сборочную единицу без повреждения или разрушения деталей.
Заклепочные соединения.
Заклепка — круглый стержень с головкой на одном конце. Головка на другом конце образуется при осаживании заклепки обжимкой (рис. 1.5, а). В процессе осаживания не только формируется головка, но осаживаемый металл стержня плотно заполняет отверстие, в котором находится заклепка. Осаживание может осуществляться холодным способом, если диаметр заклепки не превышает 10 мм, и горячим способом при диаметре более 10 мм.
Существуют различные типы заклепок (рис. 1.5,6): / — с полукруглой головкой; 2
— с полупотайной головкой; 3
— с потайной головкой; 4
— полые.
В соединениях, находящихся под действием продольной нагрузки, заклепки рассчитывают на срез и проверяют на смятие. Заклепками можно соединять две или три детали. Соединение двух деталей называется односрезным
(рис. 1.5, в),
трех деталей —двухсрезным
(рис. 1.5, г).

Рис. 1.5. Заклепочные соединения
Шаг t
зависит от диаметра заклепок, назначения заклепочного соединения и принятого расположения заклепок. При параллельном их расположении t
³ 3d.
Чтобы заклепка не прорезала соединяемые детали, расстояние / от оси заклепки до свободной кромки в направлении действующей силы (рис. 1.5, в) принимается равным (1,5 ¸ 2) d
(где d
— диаметр стержня заклепки, мм), а расстояние в перпендикулярном направлении — (1,2 ¸ 1,5) d.
Допускаемая нагрузка на заклепку в односрезном соединении
Р1
=
pd2
/4[
t]ср
, кгс (Н)* ,
(1.1)
где [
t]ср
— допускаемое напряжение на срез, кгс/мм2
(Па).
(Н)*-
д
ля того, чтобы размерность формул была выражена в той или иной системе единиц, необходимо, чтобы все составляющие величины принимались в размерности, соответствующей той же системе.
Для двухсрезного соединения
Р1
=2
pd2
/4[
t]ср
, кгс (Н)* , (1.2)
По известной нагрузке определяется необходимое число заклепок z:
для односрезного соединения
z
=P/P1
=P/
[
t]ср
pd2
/4
(1.3)
для двухсрезного соединения
z
=P/2
[
t]ср
pd2
/4
(1.4)
где Р
— усилие, действующее на все заклепки, кгс (Н).
Заклепки проверяют на смятие по формуле
P1
£[
s]см
dd,
(1.5)
где d — толщина соединяемых деталей, мм; [
s]
см
— допускаемое на-
пряжение на смятие, кгс/мм2
(Па).
Сечение соединяемых деталей проверяют на растяжение:
s=
P/
Fp
£[
s]
р
,
(1.6)
где Fp
— рабочая площадь в сечении, проходящем через оси отверстия, мм2
; [
s]р
— допускаемое напряжение на растяжение, кгс/мм2
(Па).
Чтобы заклепки не вырезали кромку соединяемых деталей, должно быть выдержано следующее условие:
Р
£2 (l - d/2)
d[
t]ср
(1.7)
В результате этих расчетов определяют шаг заклепок t
и расстояние l .
По назначению заклепочные соединения разделяют на прочные (конструкции мостов, балок, ферм) и плотнопрочные (котлы, резервуары). Для обеспечения герметичности плотнопрочных швов заклепки всегда ставятся в горячем состоянии.
Рис. 1.6. Стыковые сварные соединения
Заклепочные соединения выполняются швами внахлестку (см. рис. 1.5, в)
и швами встык с одной или двумя накладками (см. рис. 1.5, г).
По числу рядов заклепок различают швы однорядные, двухрядные, трехрядные и многорядные. Заклепки могут располагаться параллельными рядами или в шахматном порядке.
Заклепочные соединения применяют для соединения деталей, изготовляемых из трудносвариваемых металлов, или деталей, которые при сварке деформируются, а также в конструкциях, подвергающихся вибрационным нагрузкам..
Сварные соединения. Такие соединения являются наиболее совершенными из неразъемных соединений, так как лучше других приближают составные детали к целым. Соединение деталей при сварке осуществляется путем сварных швов. Эти швы образуются в результате расплавления электрода при электросварке или прутка при газовой сварке. Наиболее распространена электросварка. Помимо дуговой сварки большое применение получила контактная сварка. Она основана на использовании повышенного омического сопротивления в стыке Деталей. Металл в зоне стыка разогревают до пластического состояния, после чего ток выключают, а разогретые детали сдавливают и сваривают.
Сварка разделяется на следующие виды: стыковую, точечную, ленточную.
С т ы к о в а я с в а р к а
применяется для сварки стержней сравнительно небольшого сечения — арматуры, труб и различных листовых конструкций (рис. 1.6). При толщинах свариваемых изделий больше 8 мм делают подготовку кромок, чтобы шов проваривался по всей толщине деталей. Сварной шов называется стыковым. Другие виды сварных соединений выполняют угловыми швами, которые делятся на лобовые,
фланговые , косые, комбинированные.
Т оче ч ная с в а р к а
деталей осуществляется не по всей поверхности, а в отдельных точках. Этот метод применяют преимущественно для сварки тонкостенных конструкций,сварки внахлестку листовых деталей толщиной не более 3—4 мм и сварки арматурных сеток из тонких стержней.
Л е н т о ч н а я (ролик о в а я ) с в а р к а
— шов получается в виде узкой непрерывной ленты, расположенной вдоль стыка. Электроды для этого вида сварки имеют форму роликов. Такая сварка применяется чаще для соединения внахлестку листов.
Расчет шва сварных соединений на прочность ведется в зависимости от типа соединения и вида шва. Для расчета принимают, что действующие усилия распределяются равномерно по длине шва, а напряжения — равномерно по сечению.
Стыковые швы (см. рис. 1.6) рассчитывают на растяжение или сжатие. При этом определяют длину шва, которая зависит от действующей растягивающей силы Р
,
толщины свариваемых деталей б и допускаемого напряжения на растяжение [
s ']
р
. Последнее зависит от марки электрода и допускаемых напряжений материала свариваемых деталей. Длина шва, мм, l
с
= Р /
d [
s '] р
(1.8)
Угловые лобовые швы рассчитывают на срез. Рабочее сечение шва определяют по высоте h
прямоугольного равнобедренного треугольника
(шва). Высота h =
0,7 а,
где а
— катет треугольника. Длина шва, мм, l
л
= Р / 2 * 0,7
[
t '] a
(1.9)
где [
t ']
— допускаемое напряжение на срез наплавленного материала,
кгс/мм2
(Па).
Фланговые швы также рассчитывают на срез. Их общая длина 2l
ф
может быть определена по формуле (1.9). По этой же формуле рассчитывают длину косого шва.
Р е з ь б о в ы е с о е д и н е н и я .
Такие соединения деталей осуществляются с помощью резьбы. Каждое резьбовое соединение в принципе состоит из двух деталей: винта и гайки, винтовой пары, конструктивное же их выполнение может быть различным.
Резьба образуется путем нанесения на поверхность детали винтовых канавок. Сечение этих канавок, т. е. профиль резьбы, имеет прямоугольную, треугольную или трапецеидальную форму. По направлению винтовой линии различают правую или левую резьбу. У правой резьбы винтовая линия идет слева направо и вверх, и наворачиваемая на винт гайка поворачивается по часовой стрелке .
У левой резьбы винтовая линия идет справа налево и вверх. Левую резьбу применяют только в специальных целях; обычно применяется правая резьба. Если на стержне или в отверстии расположены две или несколько винтовых канавок, то они образуют многозаходную резьбу. Все крепежные резьбы — однозаходные с треугольным профилем; многозаходные (двух- и трехзаходные) резьбы применяются обычно в винтовых механизмах, например в домкратах.
При резьбовом креплении важно, чтобы усилие Р
вдоль оси болта или шпильки было достаточно для соединения (затяжки) деталей. Величина этой силы в зависимости от прикладываемого окружного усилия может быть получена, если развернуть один виток резьбы по среднему диаметру . Развертка представляет собой прямо-угольный треугольник, где один катет равен шагу резьбы, а второй — Длине окружности по среднему диаметру. Угол подъема р равен:
tg
b = S /
p d2
.
Чтобы определить взаимодействие между силой Р
и окружной силой Т, прикладываемой для затяжки, заменим гайку ползуном А.
При перемещении ползуна, т. е. при относительном движении, возникает равнодействующая от нормальной силы и силы трения, которая наклонена к нормали под углом трения j. tg j = m , где m — коэффициент трения. Из разложения этой силы следует, что окружная сила, кгс (Н),
T = P tg(
b +
j ).
Величина угла ф неодинакова для резьб различного профиля. У треугольного профиля она больше, чем у прямоугольного, так как трение в резьбе с прямоугольным профилем меньше, чем с треугольным.
Винтовые пары применяют не только для крепежных целей, но и в механизмах для подъема грузов (домкратах) и для преодоления усилий. В этом случае очень важно, чтобы поднимаемый груз при остановке механизма, когда перестает действовать движущая окружная сила Т,
не опускался, т. е. чтобы винтовая пара обладала свойством самоторможения. Это значит, что ползун А
не должен сползать по наклонной плоскости под действием силы Р,
если снято действие силы Т.
Самоторможение достигается при условии, когда угол подъема Р меньше угла трения j.
Ш п и л ь к и
не имеют головок, резьба нарезается на обоих концах. Один конец шпильки ввертывается в резьбовое отверстие, а на другой навертывается гайка. Шпильки применяют там, где по конструктивным соображениям нельзя установить болты, а также при соединении деталей из алюминия и легких сплавов, так как резьба быстро разрушается.
Б о л т ы и в и н т ы
имеют на одном конце резьбу для ввертывания в резьбовое отверстие одной из деталей, а на другом конце головку: болты — шестигранную или квадратную под ключ , а винты—полукруглую, цилиндрическую или потайную с пазом под отвертку . Болты и винты стандартизованы по диаметру, длине l
, Длине нарезаемой части l
0
, размеру под ключ S
и высоте головки h
. Винты применяют в соединениях, где действуют усилия меньше, чем в болтовых.
Г а й к и
бывают различных конструкций. Обычно применяют шестигранные гайки, реже квадратные и круглые. Чтобы круглые гайки можно было завертывать, в них делают пазы или отверстия.
Для предохранения гайки от самоотвинчивания применяют различные способы стопорения: кроме основной устанавливается контргайка , которая создает дополнительное натяжение и дополнительное трение в резьбе основной гайки, что препятствует ее отвертыванию. В других случаях под гайку устанавливают пружинную шайбу, что сохраняет силы трения между резьбой и гайкой .
При использовании круглых гаек применяют стопорные винты .
Делают также специальные гайки со шплинтами .
Детали резьбовых соединений рассчитывают, исходя из следующих yсловий нагружения:
1. Болты работают только на растяжение (например, рым-болт редуктора —рис. 1.11, а).
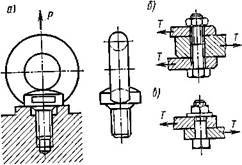
Рис. 1.11. Различные условия болтов
2. Болты работают на растяжение и кручение (рис. 1.11,6) в тех случаях, когда они установлены с начальной затяжкой. В этих болтах, помимо растягивающих сил, действует крутящий момент, так как во время завертывания гайки возникают силы трения в резьбе.
3. Болты работают на срез и смятие (рис. 1.11,
в).
В этих соединениях болт ставят в отверстие без зазора. Напряжения среза и смятия в болте вызываются действием поперечной силы Т.
Клиновые, клеммовые, шпоночные и шлицевые соединения.
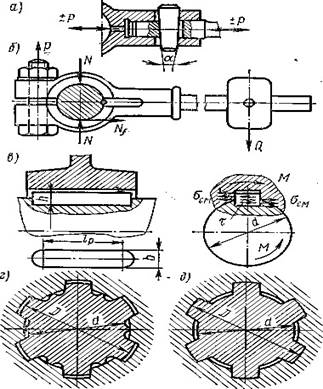
Рис. 1.12. Разъемные соединения
Эти соединения являются разъемными.
Клинов ое соед инение деталей (рис. 1.12,
а)
осуществляется при помощи клина, забиваемого в отверстия этих деталей. Угол а
делается таким, чтобы под действием сил, перпендикулярных оси клина, он не выжимался из отверстия, т. е. клин должен отвечать условию самоторможения. Этому условию отвечают клинья, у которых tga> 1/30. Клинья бывают односторонние и двусторонние. В строительных машинах обычно применяются односторонние клинья. Этот вид соединения прост по конструкции.
К л е м м о в о е соедин е н и е деталей (рис. 1.12,6) осуществляется при помощи клеммы представляющей собой цилиндр с прорезью или состоящей из двух отдельных частей. Такие соединения применяют для закрепления на валах и осях различных деталей, например рычагов противовесов, ручек поворота осей и др. Клемма удерживается на валу силой трения Nf
между поверхностью отверстия клеммы и поверхностью вала, создаваемой в результате затяжки силой Р.
Эти соединения можно применять только при передаче небольших нагрузок. Достоинством клеммовых соединений является простота конструкции, возможность перестановки деталей и регулировки их взаимного расположения.
Ш п о н о ч н о е с о е д и н е н и е показано на рис. 1.12,
б. Усилие, передаваемое от одной детали к другой, воспринимается боковыми поверхностями шпонки. Эти усилия стремятся смять и срезать шпонку. Для расчета шпонок на смятие принимается, что напряжения sсм
распределены по всей длине и высоте шпонки равномерно, что равнодействующая сил, действующих на шпонку, приложена на плече, равном d/2, и что шпонка выступает над поверхностью вала на 0,5/г (высоты шпонки). Следовательно, по передаваемому моменту М
можно определить величины sсм
и tср
:
sсм
= 4M / hlp
d
£ [
s]
см
(1.10)
tср
= 2M/ bl
p
d
£ [
t]
ср
(1.11)
При передаче больших крутящих моментов на валах устанавливают две или три шпонки.
Ш л и ц е в о е с о е д и н е н и е (рис. 1.12, г) является как бы многошпоночным соединением. В детали, помещаемой на валу, протягивают пазы (канавки ) соответствующие выступам (шлицам) на валу. Шлицы выполняются с прямолинейным, эвольвентным и треугольным профилями. Эти соединения бывают неподвижными и подвижными, когда деталь может перемещаться вдоль оси вала.
Боковые поверхности шлицев рассчитывают на смятие. Принимается, что усилие Р
от передаваемого крутящего момента М
кр
приложено на диаметре d
cр:
Р = 2М
кр
/d
cр
,
кгс(Н).
Так как d
cр
= ( D + d ) / 2
то P = 4M
кp
/(D + d)
.
Следовательно,
2 2
[
s]
см
= 2P / ( D + d ) lzk = 8M
кp
/ ( D + d )
£ [
s]
см
(1.12)
где l
—
длина шлица, мм; z
—
число шлицев; k
— коэффициент, учитывающий неравномерность распределения нагрузки между шлицами.
ПЕРЕДАЧИ
Привод рабочих органов, ходовой части и других узлов машины осуществляется с помощью силовых передач, которые не только передают движение, но изменяют скорость, а иногда характер и направление движения. Передачи бывают механические, гидравлические и электрические.
Механические передачи
разделяются на передачи трением (фрикционные и ременные) и передачи зацеплением (зубчатые, червячные и цепные). В каждой передаче элемент, который передает мощность, называется ведущим,
а элемент, которому передается эта мощность, — ведомым.
Чаще всего частота вращения ведущего п1
и ведомого n2
элементов различна. Отношение этих п1
к n2
называется передаточным числом
i = п1
/ п2
.
(1.12)
Передачи могут быть понижающие, когда i
> 1; п1
> п2
,
и повышающие, если i
> 1; п1
< п2
.
Понижающие передачи имеют наибольшее применение, так как частота вращения привода чаще бывает больше частоты вращения исполнительного органа.
Для ряда расчетов приходится определять мощность N = Pv/9,81
Вт, или N = Pv,
Вт, где Р
— действующая сила; соответственно в кгс или Н; v
— скорость, м/с.
При вращательном движении v = 2
pRn / 60,
где R
— радиус колеса или шкива, м; п
— частота вращения, об/мин. Подставим значения v
в формулу мощности
N =P * 2
pRn / 9,81 * 60
или N = P * 2
pRn / 60
(1.13)
Так как PR = М,
то
M
» 95N / n,
кгс*м, или M = 9,5N / n,
Н*м.
(1.14)
При передаче мощности от ведущего вала к ведомому имеются потери на трение, нагрев, аэродинамические и другие потери. Поэтому на ведомом валу мощность всегда меньше. Величина потерь мощности характеризуется КПД передачи и определяется как отношение величин мощности N2
на ведомом валу к мощности N1
на ведущем валу:
h=N2
/ N1
(1.14а)
Величина момента М
2
на ведомом валу равна произведению момента на ведущем валу М
х
на передаточное число и КПД:
М
2
= М1
i
h
(1.15)
Фрикционные передачи.
Передачи, у которых движение от одного элемента к другому передается силами трения. Наиболее простая конструкция такой передачи показана на рис. 1.13, а.
Здесь вращение от одного вала к другому передается под действием сил трения между Дисками, надетыми на эти валы. Величина силы трения Р
(Н) зависит от усилия Q, с которым один диск прижимается к другому, и от коэффициента трения m:
P = Q
m
(1.16)
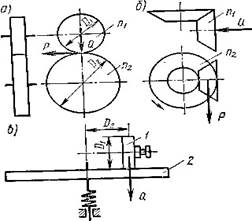
Рис. 1.13. Фрикционные передачи
В рассматриваемых передачах всегда имеет место проскальзывание дисков, поэтому величина передаточного числа непостоянна. Она подсчитывается по формуле
i = п1
/ n2
=D2
/ D1
( 1 -
x )
(1.17)
где x — величина, характеризующая относительное скольжение и зависящая от материала фрикционных дисков (x= 0,002 - 0,03).
Фрикционными передачами можно передавать вращение между пересекающимися осями (рис. 1.13, б). В этом случае усилие, с которым конические катки прижимаются один к другому, создается под действием усилий, направленных вдоль осей катков.
Передаточные числа у фрикционных передач не превышают 10; чаще всего они составляют 5—7. Фрикционные передачи применяют в случаях, когда передаточное число должно быть переменным.
На рис. 1.13, в
показан случай, когда два диска расположены так, что их оси взаимно перпендикулярны. Диск 1
соприкасается по образующей наружной поверхности с торцевой поверхностью диска 2
и прижимается к нему силой Q. При вращении диска 1
сила трения приводит в движение диск
2. Частота вращения диска 2
зависит от расстояния D2
диска 1
от оси вращения диска 2.
Передаточное число в такой передаче равно:
i=D1
/D2
.
Изменением величины D2
регулируется величина i.
Такие передачи просты по конструкции, имеют небольшие динамические нагрузки, возможность плавного изменения передаточного числа (вариаторы). К недостаткам следует отнести проскальзывание дисков, в результате чего не обеспечивается заданное передаточное число.
В строительных машинах фрикционные передачи применяются редко и то во вспомогательных механизмах.
Ременные передачи
служат для передачи вращения от одного вала к другому, находящемуся на значительном расстоянии (рис. 1.14, а).
Они состоят из двух шкивов, на которые надет бесконечный ремень (плоский, трапецеидальный — клиновой, реже круглый).
По применяемым материалам ремни бывают хлопчатобумажными прорезиненными (наиболее распространенные), хлопчатобумажными и полиамидными, обладающими прочностью больше в пять раз, чем прорезиненные, и в 8—10 раз больше, чем кожаные.
При вращении ведущего шкива в результате сил трения, возникающих между шкивом и ремнем, последний движется в направлении вращения этого шкива. В результате сил трения, возникающих между ремнем и ведомым шкивом, ремень увлекает за собой и приводит во вращение ведомый шкив. Величина силы трения между шкивом и ремнем, т. е. величина тягового усилия (Н) определяется как разность между силами S1
и S2
,
действующими в сбегающей и набегающей ветвях ремня: P = S1
— S2
.
(1.18)
Ременную передачу можно рассматривать как гибкую нить, огибающую цилиндр. Для определения натяжения такой нити Эйлер вывел зависимость ma
S1
/ S2
= e
(1.19)
где S1
и S2
— силы, приложенные к концам нити, (Н); е
— основание натурального логарифма; m — коэффициент трения между нитью и поверхностью цилиндра; a — угол обхвата цилиндра нитью.
п
г б)
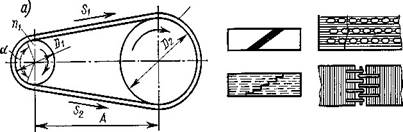
Рис. 1.14. Ременные передачи
В ременных передачах угол а
есть угол между радиусами, проведенными через точки касания ветвей ремня с окружностью шкива.
Отношение S1
/ S2
зависит в значительной степени от m и a.
Большое значение имеет правильное и надежное соединение концов ремня. Плоские кожаные и прорезиненные ремни склеивают специальными клеями. Концы ремня можно скреплять заклепками, скобками и т.д. (рис. 1.14,6). При склеивании прочность стыков составляет 80—85% прочности целого ремня, а при скреплении концов — всего 25— 30%.
Все большее применение получают клиновые ремни. Они позволяют передавать вращение при малом расстоянии между осями шкивов. Угол j
(рис. 1 15, а)
составляет 34—40°. Различные виды клиновых Ремней показаны на рис. 1.15, б.
Для плоских ремней оптимальное расстояние между осями шкивов
A = 2(D1
+ D2
), мм,
(1.20)
где D
1
, D2
— диаметры ведущего и ведомого шкивов, мм.
Для клииоременных передач величину А
выбирают в зависимости от диаметра большого шкива Dб и передаточного числа:
| I
|
1
|
2
|
3
|
4
|
5
|
6 и более
|
| A
|
1,5D
б
|
1,2 D
б
|
1 D
б
|
0,95D
б
|
0,9 D
б
|
0,85 D
б
|
Минимальное расстояние
А
min
=
0,55 (D
1
+ D
2
) + H,
мм,
(1.21)
где Н
— высота сечения ремня, мм.
В плоскоременных передачах передаточные числа допускаются до 10, в клииоременных — до 15, передаваемые мощности — 2000 и 10 000 кВт.
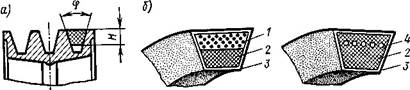
Рис. 1.15. Клиноременные передачи: / — кордовая ткань; 2 — резиновы( ткани; 4
наполнитель; 3
— обертка из прорезиненной — кордовые шнуры
Скорость ремня может достигать 30 м/с при прорезиненных, 45 м/с— при кожаных. Коэффициент трения между ремнем и шкивом у клиновых ремней значительно больше, чем у плоских.
Достоинствами ременной передачи являются: простота конструкции и возможность передачи движения на сравнительно большие расстояния; эта передача смягчает толчки, ограничивает возникновение значительных перегрузок. К недостаткам относят большие габариты и невозможность получения точного передаточного числа из-за проскальзывания ремня.
Передаточное число i
ременной передачи определяется по формуле
(1.17)
.
При эксплуатации ременных передач необходимо следить, чтобы масло не попадало на внутреннюю часть ремней и на поверхность шкива, так как резко снижается коэффициент трения, а следовательно, и величина тягового усилия Р.
Работоспособность ременных передач определяется: 1) тяговой способностью или силами сцепления ремня со шкивом; если эти силы недостаточны, то ремень начинает буксовать; 2) долговечностью ремня.
В последнее время появились зубчато-ременные передачи, получающие распространение с внедрением новых искусственных материалов, армированных стальными тросами или с полиамидным кордом. Эти передачи компактнее, работают бесшумно, без скольжения, со скоростью до 80 м/с и передают мощность до 1000 кВт.
В строительных машинах ременные передачи применяют редко для привода дробилок, очень редко с клиновыми ремнями для других машин, чаще для вспомогательных механизмов.
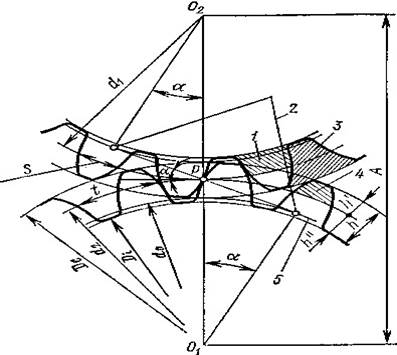
Рис. 1.16.схема зацепления цилиндрических зубчатых колес:
I
— ножка; 2
— линия зацепления; 3
— впадина; 4 —
головка; 5
— основная окружность
Зубчатые передачи состоят из колес, по окружностикоторыхнарезаны зубья. Оси колес расположены на таком расстоянии, что зубья одного колеса входят между впадинами другого колеса. При вращении одного колеса боковые поверхности его зубьев упираются в боковые поверхности зубьев другого колеса, в результате чего второе колесо получает вращение в противоположном направлении. Меньшее из пары зубчатых колес называют шестерней,
а большее —колесом.
Термин зубчатое колесо является общим.
Представим себе два диска диаметром dx
и d2
,
установленные так, что они соприкасаются в точке Р
(рис. 1.16). Если диск диаметром dj имеет частоту вращения в минуту, равную п1
и приводит во вращательное движение диск диаметром d2
без скольжения, то при вращении этих дисков передаточное число
i= n1
/ n2
= d2
/ d1
Eсли по наружному диаметру дисков нарезать зубья и выполнить профиль этих зубьев таким, чтобы во время вращения зубья все время соприкасались бы в точке касания дисков Р
и обкатывались друг относительно друга без скольжения, то при вращении таких зубчатых колес передаточное число
i= n1
/ n2
= d2
/ d1
= z1
/ z
2
.
(1.21)
Этим условиям отвечают зубья, имеющие профиль развертки-окружности (эвольвентный).
Для того чтобы профили зубьев касались в точке Р,
необходимо Развернуть окружности, диаметры которых меньше d
x
и d
2.
Эти окруж-
ности диаметром d
0
называются основными окружностями.
Касательная к этим окружностям называется линией зацепления
и проходит через точку Р,
называемую полюсом зацепления
.
Окружности диаметром dx и d
2
называются делительными
.
Основными элементами, характеризующими зубчатое зацепление, являются:
число зубьев шестерни и колеса соответственно z
1
и z
2
;
передаточное число i = n
1
/ n
i
= z
2
/ z
1
шаг зубьев t,
равный расстоянию между одноименными профилями (двумя правыми или двумя левыми) двух смежных зубьев, измеренному по делительной окружности, мм; модуль зацепления т
= t /
pпринимается в качестве основного параметра
зацепления; высота головки зуба К
и высота ножки зуба h";
нормальная высота
головки принята h' = т;
высота ножки h"
= 1,15 m, мм; высота зуба для нормального зацепления h =
2,25m, мм; диаметр делительной окружности d = mz,
мм; диаметр окружности выступов Di
(наружный диаметр зубчатого колеса):
D
e
= А + 2/h' = mz + 2m = т (г + 2)
, мм; межцентровое расстояние А,
мм; толщина зуба s, мм;
диаметр окружности впадин D
i
= d
2
— 2h" = mz — 2,5m = m (z — 2,5),
мм; ширина рабочей части колеса b;
для прямозубых колес b = (6
¸ 10) т
;
полюс зацепления Р
— постоянная точка, в которой общая нормаль к соприкасающимся профилям зубьев в точке их касания пересекается с линией, соединяющей центры зубчатых колес;
линия зацепления — прямая, представляющая собой геометрическое место точек касания профилей двух соприкасающихся зубьев; она является касательной к основным окружностям; угол зацепления а
— угол между линией зацепления и перпендикуляром
к линии центров колес.
Величины указанных параметров даны для цилиндрических прямозубых колес с некорригированным зубом. Чем больше ширина зуба b
и число зубьев г, находящихся в зацеплении, тем большую мощность можно передавать передачей.
Для увеличения b
и г, находящихся в зацеплении, цилиндрические колеса делают косозубыми, конические — косозубыми или с кривыми зубьями.
Зубчатыми колесами передают вращение между валами с параллельными, перекрещивающимися и пересекающимися осями. Кроме внешнего передачи могут иметь и внутреннее зацепление. На рис. 1.17 приводятся основные виды передач.
Достоинством
зубчатых передач являются малые габариты, высокий КПД (до 0,96—0,98), большая надежность и долговечность, постоянство передаточных отношений и применимость в широком диапазоне мощностей — до 50 тыс. кВт, скоростей — до 150 м/с (обычно до 12—15 м/с) и передаточных отношений — до 20, чаще для цилиндрических прямозубых колес до 10, для конических передач до 5, для червячных до 80.
Недостатком
косозубых передач является возникновение силы вдоль оси колеса (рис. 1.17, б), что требует установки подшипников, воспринимающих эту силу. Для устранения такого недостатка в мощных
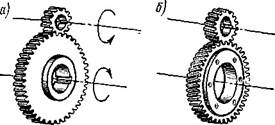
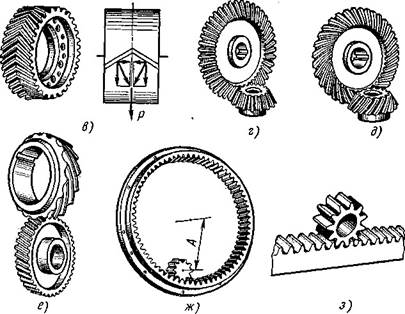
Рис. 1.17. Виды зубчатых передач:
а
- цилиндрические прямозубые; б
- цилиндрические косозубые; в
- цилиндрические шевронные; г
- конические прямозубые; д
- конические с круговым зубом; е
- винтовые; ж
- с внутренним зацеплением; з
- реечное зацепление.
передачах применяют зубчатые колеса с шевронным зубом (рис. 1.17, в
); при этом силы, возникающие от косого расположения зубьев взаимно уничтожаются.
Шаг зубьев у конических колес переменный и уменьшается к вершине зуба конуса.
На работу зубчатых колес влияют размеры колес, точность изготовления и монтажа, жесткость валов,режимы работы и т. д.
Редукторы
— механизмы в виде отдельных агрегатов, которые служат для понижения частоты вращения и увеличения крутящих моментов. Они состоят из одной или чаще нескольких пар зубчатых колес или червячных передач, помещенных в специальном корпусе.

Рис. 1.22. Редукторы
Для передаточных чисел до 10 редукторы выполняют одноступенчатыми (рис. 1.22, а), до 15—30 — двухступенчатыми (рис. 1.22,6). Для больших передаточных чисел — трехступенчатыми (рис. 1.22, в).
Редукторы с коническими колесами выполняют одноступенчатыми (рис. 1.22, г) или, в сочетаний с цилиндрическими,—двухступенчатыми (рис. 1.22, д).
Червячные редукторы обычно выполняют одноступенчатыми (рис. 1.22, е).
Передаточное число двухступенчатых или трехступенчатых редукторов равно произведению передаточных чисел каждой пары.
Цепные передачи.
Для передачи вращения между двумя параллельными валами при большом расстоянии между ними (до 8 м) применяют передачи, состоящие из двух цепных звездочек и бесконечной 1епи (рнс. 1.23). В таких передачах применяют так называемые приходные в основном втулочнороликовые однорядные и многорядные цепи.
Шаг цепей колеблется от 8 до 120 мм. Каждое звено имеет ось 1
(рис 1.24), на которую напрессовываются пластины 2,
образуя наружное звено. На ту же ось надевается втулка 3,
на которую напрессовывается пластина 4,
образуя внутреннее звено. На втулках насажены ролики 5,
входящие в зацепление со звездочками.
Существуют и другие конструкции цепей: втулочные, пластинчатозубчатые, втулочно-роликовые с изогнутыми пластинками, фасоннозвеньевые крючковые, фасонно-звеньевые втулочно-штырьевые.
Конструкция звездочек цепных передач во многом подобна конструкции зубчатых колес.
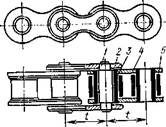
Рис. 1.24. Втулочно-роликовая цепь
Делительная окружность звездочки проходит через центры шарниров цепей (рис. 1.25). Диаметр этой окружности D0
= t / ( sin
p/z ),
мм,
(1.22)
где t
— шаг зуба, мм.
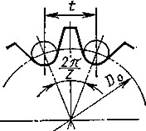
Рис. 1.25. Профиль зубьев звездочки
Профили зубьев звездочек роликовых и втулочных цепей могут быть выпуклыми, прямолинейными и вогнутыми. Зуб любого профиля должен обеспечивать свободный вход и выход шарниров из зацепления.
В зависимости от передаточного числа число зубьев малой звездочки назначается равным 32—12. Передаточное число i = n1
/ n2
= z2
/ z1
= D2
/ D1
.
Обычно i £ 8, а в тихоходных передачах может достигать 15.
Скорость цепи выбирают до 15 м/с, а в быстроходных передачах — до 25—30 м/с. Передаваемые мощности достигают 800 кВт, наиболее эффективны они до 120 кВт.
Под действием собственного веса цепь провисает (см. рис. 1.23). Для нормальной работы необходимо, чтобы величина провисания была не больше определенного значения, для этого цепь натягивается перемещением оси одной из звездочек. Для горизонтальных передач и передач под углом наклона до 45° допускаемый прогиб к горизонту f
= 0,02A, для передач, близких к вертикальным, f
= (0,01 ¸ 0,015) А.
Реаичина натяжения S
н
(кН) зависит от массы 1 м цепи q,
расстояния А
между осями, допускаемого прогиба f
:
2
S
н
=q A / 8 f
Допускаемая полезная сила Р,
которая может передаваться цепью, зависит от допускаемых удельных давлений в шарнирах цепи [р]0
, кгс/мм2
(МПа). Удельное давление выбирают таким, чтобы контактные напряжения не превышали допускаемых. Допускаемая величина удельного давления [р]0
зависит от скорости шага и типа цепи. Для втулочно-роликовых цепей принимается [р]
0
= 3,5 ¸ 1,4 кгс/мм2
(35— 14 МПа); для зубчатых цепей
— 2 ¸ 0,7 кгс/мм2
(20—7 МПа).
Величина допускаемой полезной нагрузки, кгс (Н),
P = [р]
0
F / k
э
(1.23)
где F
— проекция опорной поверхности шарнира, мм2
; k
э
— коэффициент, характеризующий условия эксплуатации передачи; зависит от характера динамических нагрузок, длины цепи, наклона передачи, характера смазки, режима работы; изменяется от 1,2 до 3,0. Общее натяжение ведущей цепи
S1
= S
н
+ Р.
(1.24)
Передаваемая мощность для однорядной цепи
N = Pv
Bт,
(1.25)
где v
— скорость цепи, м/с; Р
— сила, Н.
При работе цепной передачи цепь вытягивается, изнашиваются шарниры и зубья звездочек. Если цепь удлиняется больше чем на 3%, то она начинает соскакивать со звездочки. При скоростях цепи более 6 м/с допускается удлинение цепи меньше чем на 3%.
При эксплуатации цепей необходимо смазывать шарниры и зубья звездочек.
Достоинствами цепных передач является: возможность применения в широком диапазоне межцентровых расстояний, малые габариты и масса, простота замены и высокий КПД. Недостатки — возможность внезапного обрыва, удлинение вследствие износа и необходимость натяжных устройств, неравномерность скорости, особенно при малом числе зубьев звездочки.
В строительных машинах цепи широко применяют для привода от двигателя (обычно многорядные) и приводов отдельных механизмов (однорядные).
ВАЛЫ И ОСИ. ИХ СОЕДИНЕНИЯ И ОПОРЫ
Вращающиеся детали машин устанавливают на осях или валах. Валы всегда вращаются вместе с деталями и передают крутящий момент; оси же, вращаются ли они вместе с деталями или остаются неподвижными, момента не передают и только поддерживают детали. Поэтому оси нагружены только изгибающими усилиями, а валы еще и крутящими моментами.
Валы бывают гладкие, ступенчатые (рис. 1.26, а, б), коленчатые. Когда диаметр червяка или шестерни близок к диаметру бала, их изготовляют как одно целое, например вал с червяком, вал с зубчатой шестерней.
Валы и вращающиеся оси устанавливают опорами (цапфами) в подшипниках. Цапфы, воспринимающие осевую нагрузку, называются пятами
.
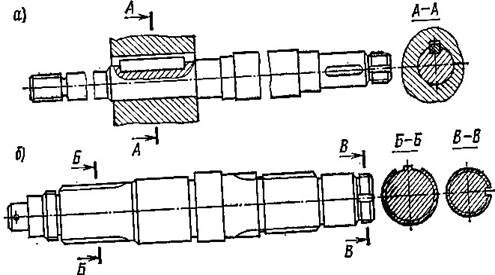
Рис. 1.26. Валы: а
— для шпоночного соединения; б — для шлицевого соединения
Для соединения валов с деталями применяют шпонки или шлицы. При передаче больших крутящих моментов на валу устанавливают две или три шпонки.
Эмпирически установлено, что величина максимальных прогибов не должна быть больше 0,0003 от расстояния между опорами, а в местах установки зубчатых колес — не больше 0,03 от модуля зацепления.
Угол закручивания не должен превышать определенных величин. Его выбирают в зависимости от длины вала и условий работы. Для валов строительных машин этот угол составляет 15'—30' на 1 м длины вала.
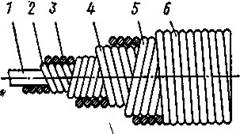
Рис. 1.27. Гибкий вал:
/ — сердечник; 2
— первый слой навивки; 3
— второй слой; 4
— третий слой; 5
— четвертый слой; 6 —
пятый слой
При расчете на выносливость валов и осей учитывают характер изменения напряжений, усталостные характеристики материалов, влияние концентрации напряжений, качество изготовления и т. д. Обычно расчет при этом сводится к определению запаса прочности в зависимости от указанных параметров.
Гибкие валы.
Для передачи движения между деталями, расположенными так, что жесткую связь нельзя осуществить (например, для привода вибраторов, механизированных инструментов и других механизмов), применяют гибкие валы (рис. 1.27). Их делают из нескольких слоев проволоки, плотно намотанных на сердечник, причем каждый слой имеет противоположное направление навивки. Первый, третий и пятый слои имеют правую навивку, второй и четвертый — левую. Направление навивки наружного слоя противоположно тому, которое должен иметь вал при работе, чтобы проволока не раскручивалась, а также чтобы при вращении вала внутренние слои вала уплотнялись. Броня, покрывающая гибкий вал, вместе с Ним не вращается. Она защищает вал от повреждений, удерживает на нем консистентную смазку и предохраняет рабочих от захвата валом.
Подшипники
. Подшипники служат опорами валов и осей. Различают подшипники скольжения и качения.
П о д ш и п н и к и с к о л ь ж е н и я . В зависимости от величины и направления нагрузок, возникающих на валах, применяют подшипники радиальные, которые могут воспринимать нагрузки, зправленные радиально, и упорные, которые могут воспринимать Усилия как направленные вдоль оси, так и радиальные.
Поверхность цапфы в радиальных подшипниках скользит относильно его внутренней поверхности. Уменьшение сил трения между трущимися поверхностями создается слоем смазки. При работе цапфа занимает в подшипнике эксцентричное положение, и поэтому смазка между поверхностями подшипника и цапфы принимает форму клина (рис. 1.28, а).
Цапфа, вращаясь, увлекает смазку в узкий зазор, где создается масляная подушка, поддерживающая цапфу. Слой масла, разделяющий цапфу и подшипник, создается также, если в зазор подается масло при помощи масляного насоса. На рис 1.28, а
изображена эпюра гидродинамических давлений по окружности подшипника. На рис. 1.28, б
и в
показаны подшипники скольжения. Они состоят из корпуса, вкладыша и устройства для смазки. Корпус подшипника, показанный на рис. 1.28, б,
цельный. В него впрессован цилиндрический вкладыш. На рис. 1.28, в приведен подшипник с разъемным корпусом и вкладышем, состоящим из двух половин. Цельные корпуса применяют для валов небольших диаметров. Разъемные корпуса облегчают монтаж валов, позволяют производить регулировку диаметра. На рис. 1.28, г
показан упорный подшипник.

Рис. 1.28. Подшипники скольжения:
/ —
корпус; 2 —
вкладыш; 3 —
масленка; 4
— болт крепления подшипника; 5 — крышка;
6
— болт крепления крышки; 7
— опорный вкладыш; 8 —
стопорный штифт
Вкладыши обычно делают биметаллическими. На чугунную, стальную, а в ответственных конструкциях бронзовую основу наносится антифрикционный: материал — баббит, свинцовистая бронза и т.д.
Ненаплавляющиеся антифрикционные материалы (антифрикционные чугуны, текстолит, прессованная древесина) применяют для изготовления сплошных вкладышей, которые применяют в индивидуальном и мелкосерийном производстве наряду с биметаллическими вкладышами. Нанесение мягких антифрикционных материалов, главным образом баббита, осуществляется заливкой. Толщина слоя заливки 0,5 ¸ 1,5 мм в зависимости от диаметра вкладыша. При уменьшении толщины слоя заливки увеличивается усталостная прочность баббитового слоя. Важным размером в подшипнике является длина l
; ее обычно выбирают в пределах 0,5 ¸ 0,9 диаметра цапфы d.
Подшипники скольжения рассчитывают на допускаемое удельное давление р,
величина которого должна быть меньше допускаемых величин, зависящих от материала заливки и ее толщины:
p = p / dl
£ [p]
(1.26)
Например, для подшипников с заливкой из оловянных баббитов [р]
= 20 кгс/см2
(2 МПа), а с заливкой из бронзы [р]
= 200 кгс/см2
(20 МПа).
При работе температура подшипников не должна превышать 50 °С. Подшипники скольжения ответственного назначения рассчитывают на жидкостное трение, которое основано на том, что масляный слой между цапфой и вкладышем воспринимает всю нагрузку (см. рис. 1.28, а). Подшипники скольжения устанавливают для валов большой массы, когда требуется разборка подшипника, либо когда последний работает в агрессивных средах, или при большом загрязнении.
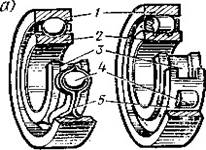
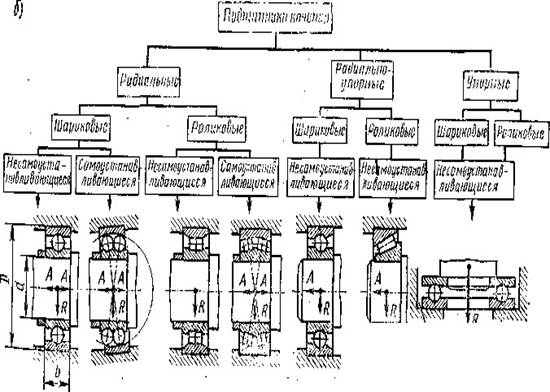
Рис. 1.29. Классификация подшипников качения
П о д ш и п н и к и к а ч е н и я (рис. 1.29, а). Они состоят из наружного / и внутреннего 2
колец с дорожками качения 3.
Между кольцами в дорожках качения устанавливаются шарики пли ролики 4,
которые катятся по Дорожкам. Чтобы ролики или шарики находились на одинаковом расстоянии один от другого, в подшипниках предусмотрены сепараторы 5,
представляющие собой штампованные кольца с отверстиями для роликов или шариков.
Широко используются роликовые подшипники (при малых диаметрах.роликов они называются игольчатыми).
Подшипники качения можно разделить на три типа: 1) радиальные, принимающие радиальные нагрузки и допускающие небольшие осевые нагрузки; 2) радиально-упорные, воспринимающие как радиальные, так и осевые нагрузки, но величина последних не должна превышать 0,7 от разности между допускаемой и действующей радиальными нагрузками; 3) упорные, воспринимающие только осевые нагрузки.
На рис. 1.29, б
дана классификация подшипников качения.
Шариковые подшипники применяют в передачах с малыми и средними нагрузками. Роликовые подшипники устанавливают в передачах с большими нагрузками, так как их грузоподъемность почти в два раза больше, чем у шариковых. Однако они хуже работают при больших числах оборотов. Максимально допускаемая частота вращения для них почти в два раза меньше, чем для шариковых подшипников.
Подшипники выбирают по нагрузкам, действующим на них. Нагрузки могут быть постоянными, переменными, с ударами, толчками, с разным соотношением величин осевых и радиальных нагрузок и т. д. Условия нагружения могут быть также различными: может вращаться внутреннее или наружное кольцо.
Расчет подшипников ведут на их долговечность. Срок службы определяют в зависимости от так называемой динамической грузоподъемности G
и эквивалентной динамической нагрузки Р.
Динамическая грузоподъемность для радиального или радиальноупорного подшипника есть постоянная радиальная нагрузка, которую группа подобных подшипников (с неподвижным наружным кольцом) может выдержать в течение расчетного срока службы, исчисляемого в 1 млн. оборотов внутреннего кольца. Величина G
зависит от среднего диаметра ролика или шарика D
т, числа роликов или шариков z
в одном ряду, i
— числа рядов тел качения в подшипнике и от среднего диаметра d
0.
Для радиальных и радиально-упорных подшипников (шариковых)
G = f
0
( i cos a)0,7
z 2/3
D
т
где f0
— коэффициент динамической грузоподъемности, зависящий от геометрии деталей подшипника, точности изготовления и материала; а
— угол между линией действия нагрузки на шарик или ролик и плоскостью, перпендикулярной оси подшипника.
Эквивалентная нагрузка Р,
воспринимаемая радиальным или радиальноупорным подшипником, — это постоянная радиальная нагрузка, при которой долговечность подшипника с вращающимся внутренним и неподвижным внешним кольцами такая же, что и при фактических условиях нагружения и вращения. Эквивалентную динамическую нагрузку определяют по формуле
P = ( Vx Fr
+ yF0
) k
г
k
т
,
где Fr
, F0
— соответственно радиальная и осевая нагрузки; V
— коэффициент, учитывающий, какое из колец (внутреннее или наружное) вращается; х
, у
— коэффициенты, учитывающие влияние радиальной и осевой нагрузок и зависящие от типа подшипника; kr
, kT
— коэффициенты, учитывающие влияние динамических нагрузок и температурного режима.
Расчет номинальной долговечности подшипников (млн. об/мин) производится по следующим формулам: для шариковых подшипников
L=(G/P)3
;
(1,27)
для роликовых подшипников
L = (G/P)10/3
;
(1.28)
долговечность подшипников
L
п = 106
/ 60n * L ;
(1.29)
где п
— частота вращения подшипника, об/мин.
Для эксплуатации подшипников важно установить их без Перекосов, чтобы температурные деформации валов не вызывали дополнительных нагрузок. Кроме того, их необходимо смазывать и предохранять от загрязнения.
Радиально-упорные подшипники устанавливают так, чтобы можно было производить осевую регулировку, что осуществляется обычно перемещением одного кольца относительно другого.
Смазка подшипников может быть консистентной или жидкой. При работе на консистентной смазке температура не должна превышать 100° С. Жидкую смазку используют там, где КПД должен быть значительным. Допускаемая температура в этом случае может достигать 120 и даже 150° С. Чтобы подшипники не загрязнялись и масло не вытекало из корпусов, устанавливают манжеты.
В подшипниках качения по сравнению с подшипниками скольжения сила трения в 5—10 раз меньше.
Муфты.
Для соединения валов, являющихся продолжением один другого или расположенных под углом, а также для передачи крутящего момента между валом и сидящими на нем деталями применяют муфты.
По назначению они разделяются на муфты постоянного действия (неуправляемые) и сцепные (управляемые). По типу соединения валов муфты делятся на жесткие и компенсирующие (рис. 1.30). Жесткие муфты различают двух видов — втулочные и фланцевые.
В т у л о ч н ы е м у ф т ы (рис. 1.30, а)
просты по конструкции, малы по габариту; применяются для диаметров валов 120 мм. Недостатком их является то, что для соединения валов последние необходимо раздвигать.
Фланцевые муфты обычно состоят из двух полумуфт и бывают Двух типов. В одном типе муфт болты устанавливают без зазора (рис. 130, б),
при этом болты работают на срез и на каждый из них действует сила
P = 2M
к / z d
,
кгс (Н) (1.30)
где z
— число болтов; d
— диаметр окружности, по которой расположены болты, мм.
По величине Р
болты рассчитывают на срез.
В другом типе муфт болты устанавливают с зазором (рис. 1.30, в).
этом случае крутящий момент М
к передается под действием момента M
т,
кгс*м (Н*м), создаваемого затяжкой болтов:
М
т
= z P
зат
f d
ср
/ 2
³ M
к
,
(1.31)
откуда
P
зат
³ 2 M
к
/ d
ср
z f
(1.32)
где P
зат
— усилие, с которым затягивается каждый болт; d
cp
— сред-
ний диаметр фланцев муфты; f
— коэффициент трения (f
= 0,15 ¸ 0,2).
К о м п е н с и р у ю щ и е м у ф т ы соединяют валы при некотором их взаимном смещении или перекосе в результате неточности изготовления, монтажа или деформации во время работы. Имеется несколько типов компенсирующих муфт. Наиболее простая муфта
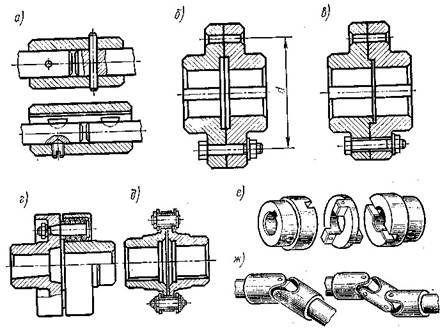
Рис.1.30. Жесткие и компенсирующие муфты
(рис. 1.30, г)
представляет собой две полумуфты, такие же, как у жестких муфт, только болт в одной из полумуфт упирается в резиновые прокладки, что позволяет компенсировать неточности в положении валов.
Цепная муфта показана на рис. 1.30, д.
Она состоит из двух полумуфтзвездочек, на которые надета цепь. Такие муфты допускают перекос валов до 1,5° и радиальное смещение до 2 мм при средних размерах и до 5 мм при больших размерах муфт.
Крестовые муфты применяют для соединения валов, когда могут быть большие смещения осей (рис. 1.30, е).
Они состоят из двух полумуфт с пазами на торцах. Между полумуфтами помещается диск, на торцах которого предусмотрены выступы, перпендикулярно расположенные по отношению один к другому. Между диском и полу-муфтами возникают силы трения, вызывающие радиальные усилия, которые передаются на вал. Величина их достигает 0,1—0,4 окружного усилия в зависимости от материала полумуфты. Недостатком этих муфт является большой износ пазов, так как во время работы средний диск движется относительно полумуфт. .
Шарнирные муфты применяют для передачи движения между валами, расположенными под углом (рис. 1.30, ж).
Возможность передачи вращения под углом до 45° обеспечивается тем, что муфта имеет два шарнира, расположенные взаимно перпендикулярно.
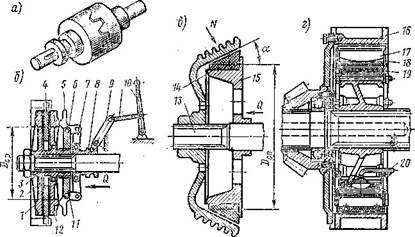
Рис. 1.31. Муфты сцепления:
а
— кулачковая муфта; б — дисковая фрикционная муфта; в
— двухконусная фрикционная муфта; г
— пневмокамерная фрикционная муфта; 1
— ведомый диск; 2
— ступица ведомого диска; 3
— вал муфты; 4
— ведущий диск; 5
— нажимные рычажки; 6
— пальцы; 7
— серьги; 8
— втулка; 9
— тяги; 10
— рычаг управления; 11
— втулка-крестовшга; 12
— нажимной диск; 13
— вал; 14
— ведомый конус; 15 '—
ведущий конус; 16
— шкив; 17
— колодки с фрикционными накладками; 18
— пружина; 19
— пневмокамера; 20
— трубка для подачи сжатого воздуха
С ц е п н ы е муф ты. Такие муфты применяют в приводах, когда необходимо при работе часто соединять или разъединять валы.
Сцепные муфты бывают кулачковые (зубчатые) и фрикционные. Первые применяют для механизмов, включаемых при их остановке или очень медленном вращении, причем включать их необходимо че чаще, чем один раз в 5—15 мин. Вторые — при включениях, производимых на ходу с периодом действия в течение иногда нескольких секунд.
Кулачковая муфта (рис. 1.31, о) состоит из двух полумуфт, на торцевых поверхностях которых имеются кулачки (зубья) треугольно, трапецеидального или прямоугольного профиля. Зубья треугольного профиля могут быть симметричными и несимметричными. Включаются и выключаются такие муфты при осевом перемещении одной из полумуфт.
Кулачковые муфты применяют главным образом в приводах и передачах, когда включение происходит при неподвижных или очень медленно вращающихся деталях, а также когда не допускается проскальзывание одного вала относительно другого.
Такие муфты изготовляют обычно из легированных сталей и термически обрабатывают до твердости НВ 50—70. Устанавливают их с высокой степенью соосности.
Фрикционные муфты позволяют осуществлять плавное включение. Они бывают ленточные, дисковые, конусные, а также пневмокамерные.
Ленточные муфты работают по принципу обычного ленточного тормоза, устанавливаемого на ведущем ободе муфты и охватывающего ведомый шкив. Их преимущество в том, что они не передают на вал осевых усилий и требуют ничтожных усилий для включения. Применяются для мощностей до 750 кВт.
Дисковая муфта (рис. 1.31, б)
состоит из полумуфт, соединяющихся под действием сил трения, возникающих между торцевыми поверхностями в виде гладких дисков. Величина создаваемого момента трения зависит от силы Q
,
с которой диски прижимаются один к другому, а также от коэффициента трения между дисками m, от среднего диаметра дисков D
cp
и от коэффициента запаса сцепления b который принимается равным 1,25— 1,5. В многодисковых муфтах момент трения зависит также и от числа дисков, т. е. от количества поверхностей трения z
,
которое равно числу дисков минус один.
Величина крутящего момента, передаваемого муфтой,
М
кр
£ Q
m D
ср / 2
b( z
- 1 )
, кгс*м(Н-м).
(1.33)
Недостатком дисковых фрикционных муфт является необходимость создания довольно большой силы Q
,
вследствие чего они обычно применяются для небольших мощностей,
Конусные муфты (рис. 1.31, в)
представляют собой две полумуфты с коническими рабочими поверхностями, одна из которых имеет внутренний конус, а другая — наружный. Перемещением одной из полумуфт вдоль оси достигается включение муфты.
Принцип работы муфты заключается в том, что благодаря конусной поверхности в результате действия силы Q
возникает нормальная сила N
,
значительно большая, чем сила Q
.
Величина крутящего момента, передаваемая муфтой, составляет
M
к
£ Q
mD
ср
/ 2
b sin
a , кгс*м (Н*м)
(1.34)
Применяются для передачи мощности до 150 кВт.
Пневмокамерные муфты широко применяют в строительных машинах, особенно в землеройных (рис. 1.31, г).
В таких муфтах трение создается между колодками резиновой камеры, связанной с одной полумуфтой и наружной поверхностью обода другой полумуфты. Колодки прикреплены к внутренней поверхности камеры шпильками и в местах трения покрыты антифрикционным материалом. При подаче воздуха в баллон создается давление на колодки, в результате которого последние прижимаются к ободу второй полумуфты. Момент, передаваемый такой муфтой,
2
М
£2 /
b *
pR b
[p]
m,
кгс*м(Н*м),
(1.35)
где R
— радиус поверхности трения; b
— ширина колодок; [Р]
— допускаемое давление.
Недостаток пневмокамерных муфт заключается в старении резины.
ОБЩИЕ СВЕДЕНИЯ О СТРОИТЕЛЬНЫХ МАШИН
КЛАССИФИКАЦИЯ МАШИН
Применяемые в строительстве машины и механизмы можно классифицировать: по виду выполняемой работы; по характеру и технологии рабочего процесса;. по режиму работы; по виду привода; по мощности (производительности); по ходовому оборудованию; по универсальности; по виду управления.
По технологическому признаку строительные машины можно разделить на следующие классы: горизонтального безрельсового транспорта; грузоподъемных монтажных работ; непрерывного транспорта; погрузочноразгрузочных работ; земляных и подготовительных работ; буровых работ; свайных работ; механической обработки (дробления, сортировки, мойки) каменных материалов; приготовления, транспортирования и укладки бетонных смесей и растворов; отделочных работ; производства железобетонных изделий, производства различного вида работ механизированным инструментом.
Класс делится на группы машин, различающиеся по характеру рабочего процесса. Например, машины для земляных работ делятся на землеройные (экскаваторы); землеройно-транспортные; для гидравлической разработки грунта и др.
Машины разных групп по режиму работы могут быть как прерывного (циклического) действия (например, одноковшовые экскаваторы), так и непрерывного действия (многоковшовые экскаваторы, машины для гидравлической разработки грунта).
Каждая группа машин может выполнять различные технологические процессы и отличаться рядом конструктивных особенностей. Так, экскаваторы применяют для работы в транспорт (например, карьерные машины) и в отвал (вскрышные машины). При этом группа разделяется на типы, отличающиеся конструкцией отдельных узлов, агрегатов, а иногда и машин.
Все типы машины должны иметь ряд типоразмеров, различающихся между собой мощностью привода, массой, размерами рабочего органа, габаритами, но имеющих в основном близкую конструкцию.
По виду основного привода различают машины, в которых используются двигатели: электрические, внутреннего сгорания, пневматические и гидравлические или комбинация двух из них (например, дизельэлектрические).
По степени подвижности (универсальности) машины делят на стационарные и подвижные; последние в зависимости от способа агрегатирования могут быть самоходными, полуприцепными и прицепными. В зависимости от типа ходового оборудования машины могут быть гусеничными, на пневматических шинах, на рельсовом и на шагающем ходу.
Различают Машины универсальные (при большом числе сменного рабочего оборудований и нескольких типах сменного ходового и силового оборудования) и машины специализированные.
а) б)
1. 
Рис. 2.1. Базовая машина с различным рабочим оборудованием:
а
— одноосные тягачи; 6
— двухосные тягачи: / — скрепер; 2
— грейдер-элеватор; 3
— кран стреловой поворотный; 4
— цементовоз; 5
— бульдозер; 6
— погрузчик с задней разгрузкой; 7
— корчеватель; 8
— роторный снегоочиститель
По системам управления различают машины с ручным и автоматическим управлением, а по средствам управления — с механическим, гидравлическим, пневматическим и электрическим управлением. Применяются машины со смешанным управлением (например, гидромеханические).
Расширяется область применения универсальных самоходных машин. Все чаще такие машины состоят из базовой машины и обычно сменного навесного или полуприцепного, реже прицепного рабочего оборудования. В качестве базовой машины используют тракторы, автомобили, гусеничные, а также колесные тягачи (рис. 2.1) и самоходные шасси. Наилучшие решения получаются агрегатированием базовых машин или машин целиком из унифицированных узлов (сборочных единиц).
Конструктивные и эксплуатационные особенности машин оценивают по основным их параметрам. К ним относятся: мощность, сила тяги, емкость ковша экскаватора или скрепера, размеры отвала бульдозера, максимальный диаметр бурения при различных категориях грунта и породы, габариты и масса машины, энергоемкость, удельные нагрузки на грунт движителей и др.
Для каждой группы машин выделяют главный параметр, который определяет эксплуатационную характеристику машин этой группы. Например, у бульдозеров главным параметром считают номинальную силу тяги, у одноковшовых экскаваторов — геометрический объем ковша. В одной и той же группе машин обычно имеется большое количество моделей, основные параметры или отдельные узлы и агрегаты которых отличаются друг от друга незначительно. В связи с трудностью организовать серийное производство машин и сложностью эксплуатации их делят на тнпоразмерные ряды, в каждом из которых количество моделей минимально. В ряду можно выбрать машину необходимой производительности, мощности и т. д., соответствующие наиболее рациональным условиям работы, а некоторые машины позволяют выполнять работы всего диапазона данного вида работ. Для этого параметры отдельных моделей связаны определенной математической зависимостью. Для строительных машин принято определять ряд по главному параметру машин. Ряд строят таким образом, чтобы отношение этого параметра между моделями изменялось по геометрической прогрессии с показателем 1,6 или 1,25.
При разработке типоразмерного ряда машин проводится также анализ основных параметров, конструктивных, эксплуатационных и экономических показателей существующих отечественных и зарубежных машин.
На основе типоразмерного ряда можно создать «семейство» машин. Для обеспечения их поточного изготовления проводят широкую унификацию и стандартизацию узлов и создают машины методом агрегатирования.
ОБЩИЕ ТРЕБОВАНИЯ К МАШИНАМ
Требования, предъявляемые к машинам, можно подразделить на социальные, конструктивные, эксплуатационные, экономические.
Социальные требования
состоят в обеспечении удобства работы в машинах, для чего предусматривают защиту рабочих от вибрационных и атмосферных воздействий, удобное размещение приборов и аппаратуры, безопасные условия труда и др.
Конструктивные требования
заключаются в том, что узлы машины, их компоновка, система управления должны отвечать современному уровню науки и техники. Машины должны иметь высокую надежность, долговечность, допускать удобную замену деталей и узлов, а также быть хорошо приспособленными к техническому обслуживанию.
Приспособленностью к техническому обслуживанию называется возможность проведения операций осмотра, смазки, регулировки, заправки, запуска в течение времени, не превышающего 0,03—0,05 от рабочего времени.
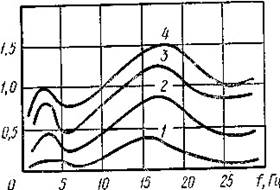
Утомляемость машиниста вызывается неудачным расположением рычагов и педалей, большими усилиями для управления ими, несовершенной конструкцией кресла,
2
 д, м/с д, м/с
Рис. 2.2. Чувствительность человека к вертикальным ускорениям:
/ — явно ощутимы; 2
— беспокоят; 3
— очень беспокоят; 4
— опасны для здоровья
плохой обзорностью, а также чрезмерной вибрацией и тряской на педалях, рычагах и сиденье машиниста, превышающими санитарные нормы шумами и др. Чувствительность человека к вертикальным ускорениям показана на рис. 2.2 (по горизонтали отложены частоты колебаний, а по вертикали — ускорения).
Большинство явлений, происходящих в машине при работе, и некоторые параметры ее характеристики зависят от управления машиниста. Машину следует рассматривать не как самостоятельную, а как комплексную систему: параметры рабочих условий — рабочий орган — металлоконструкции — привод — человек.
Эксплуатационные требования
объединяют все требования к машинам, так как только в процессе эксплуатации выявляются конструктивные, технологические и другие особенности машин.
Экономические требования
заключаются в том, что стоимость единицы получаемой продукции должна быть минимальной. Это достигается при наименьшей стоимости машины и малых эксплуатационных расходах, но при наибольшей ее производительности. Всегда имеется такое соотношение стоимости машины, затрат на ее эксплуатацию и других капиталовложений и производительности машины, при котором достигается наименьшая стоимость единицы продукции.
Минимальная стоимость единицы продукции является одним из основных экономических показателей. Однако во многих случаях следует отдавать предпочтение получению максимальной производительности даже при некотором повышении стоимости.
Одним из важных экономических требовании является .также наименьший расход энергии на единицу получаемой продукции. Удельная энергоемкость машины A
уд
— показатель, означающий отношение мощности двигателей машины А
к емкости рабочего органа q
,
производительности П
или силе тяги Тсц:
A
уд
= A / q ,
или А
уд
= А
/ П, или А
уд
= А
/ Тсц
.
Удельная металлоемкость машины — показатель, выражающий отношение массы машины к величине главного или одного из основных параметров (например, к емкости рабочего органа, к мощности двигателя, к производительности и силе тяги).
КОНСТРУКТИВНО-ЭКСПЛУАТАЦИОННЫЕ ХАРАКТЕРИСТИКИ МАШИН
Основными конструктивно-эксплуатационными характеристиками машин являются производительность, маневренность, подвижность, устойчивость.
Производительность
машины характеризуется тем количеством продукции q,
которое она может выработать в единицу времени Т: минуту, час, смену, месяц, квартал, год. Количество продукции для землеройных машин выражают в м3
, дробильных и сортировочных машин — в т и м3
.
Проектируя машину, подбирают ее главный и основные параметры таким образом, чтобы можно было получить намечаемую для нее производительность и обеспечить максимальную эффективность ее использования. Производительность определяют расчетом для наиболее характерных условий работы данной машины, расчетных режимов (скорости подъема ковша, скорости напора и др.) и нагрузок на рабочем органе. Рассчитывают производительность на 1 ч чистой работы при максимальном использовании мощности силовой установки. Найденную производительность Пк называют теоретической
или конструктивной; она является своего рода исходной условной величиной для расчета производительности в реальных условиях эксплуатации.
Для машин цикличного действия Пк пропорциональна количеству циклов п
в 1 мин и количеству продукции q,
вырабатываемой за один цикл. Количество циклов, выполняемых машиной в 1 мин, при продолжительности цикла Тц.
n
= 60 / Т
ц
(2.1)
Следовательно, для машин цикличного действия
П
к
= 60qn
, м3
/ч; (2.2)
П
к
= 60 qny,
т/ч,
(2.3)
где у
— объемная масса разрабатываемого материала.
При расчетах принимают условия работы, более характерные Для данной машины, т. е. условия, на которые она рассчитана. Например, для экскаваторов — это средний угол поворота, средняя высота нагрузки, нормальная высота или глубина забоя, а также условие, что за каждый цикл разрабатывается объем плотного грунта, paвный геометрической емкости ковша q.
Для машин непрерывного действия при перемещений насыпных материалов сплошным непрерывным потокам величина Пк
пропорциональна площади поперечного сечения потока материала F
(м2
) и скорости v
(м/с), причем эту расчетную площадь принимают неизменной на всем пути перемещения.
Производительность машин в этом случае можно подсчитать по следующим зависимостям:
П
к
= 3600Fv
, м3
/ч; (2.4)
П
к
= З600/Fvy
, т/ч.
(2.5)
Для тех же машин при перемещении штучных и сыпучих материалов отдельными порциями производительность обратно пропорциональна расстоянию l
между отдельными порциями:
П
к
= 3600qv / l
, м3
/ч; (2.6)
П
к
=
3600qvy / l,
т/ч,
(2.7)
где q
— объем каждой порции материала, м3
.
Реальные условия работы машины отличаются от расчетных вследствие различных сочетаний рабочих условий (различная категория грунтов, глубина котлована, траншей, возможный угол поворота рабочего оборудования, условия разгрузки и т.д.). Это приводит к тому, что производительность в реальных условиях несколько отличается от Пк.
Максимально возможную для данной машины и в данных условиях производительность, которой можно достичь за 1 ч чистой работы при современной организации процесса передовыми методами управления машиной на основе научной организации труда, называют технической производительностью
машины Пт.
По известным величинам Пк, которые приводятся в паспортах машин, и
корректирующему коэффициенту Кт, учитывающему кон* кретные условия работы, можно определить техническую производительность:
Пт = ПкКт (2.8)
В связи с тем что в процессе эксплуатации машины работают не непрерывно, действительная производительность оказывается меньше теоретической и технической.
Производительность, учитывающую все перерывы в работе машины, называют эксплуатационной
(Пэ).
Перерывы в работе можно разделить на следующие пять групп:
1) по конструктивно-техническим причинам. Они зависят от надежности конструкции, от времени, необходимого для подготовки машины к эксплуатации, проведения технического обслуживания, переналадки машины, замены рабочего органа;
2) связанные с организацией труда и отдыха машинистов;
3) зависящие от технологии выполнения работ (необходимость перемещения машины, изменение положения рабочего оборудования и т. д.);
4) по метеорологическим причинам (работы прекращаются из-за сильного дождя, ветра, тумана, морозов);
5) из-за общих организационных причин (например, прекращение подачи воды, питания электроэнергией), зависящих от нечеткой организации работ.
Кроме перерывов на эксплуатационную производительность оказывает влияние качество управления, т. е, квалификация механика.
В зависимости от того периода времени, для которого определяется производительность, ее подразделяют на эксплуатационную часовую, среднечасовую и годовую.
Э к с п л у а т а ц и о н н у ю часовую п р о и з в о д и т е л ь н о с т ь
рассчитывают на 1 ч полезного рабочего времени машины. При этом не учитывают внутрисменные и организационные перерывы, а также вызванные метеорологическими условиями. Она является фактически производственной нормой выработки. Последнюю принимают в расчет для определения заданий рабочим при сдельной оплате труда. Эти нормы включают в состав единых норм и расценок на строительные и монтажные работы. Нормы выработки машин устанавливают методами технического нормирования.
Э к с п л у а т а ц и о н н у ю с р е д н е ч а с о в у ю п р о и з в о д и т е л ь н о с т ь
рассчитывают на 1 ч работы с учетом организационных и метеорологических перерывов в течение данного часа.
Э к с п л у а т а ц и о н н а я с р е д н е с м е н н а я произв о д и т е л ь н о с т ь
равна произведению среднечасовой производительности на продолжительность смены в часах. Эту производительность используют для расчета плановых технико-экономических показателей машины на длительное время, для определения показателей годовой выработки, а также сметной стоимости работ.
С р е д н е ч а с о в а я э к с п л у а т а ц и о н н а я пр оиз во-
д и т е л ь н о с т ь
машин (т/год)
П
э, ср-ч
= П
э, ч
К
и
,
(2.9)
Ки = КвКк,
где Кв — коэффициент использования рабочего времени (Кв
=0,75 ÷
0,8);
К
в
= t
пол
/t
см
=t
см
- (t
мет
+ t
орг
) /t
см
где t
пол
— полезное рабочее время внутри смены; t
см
—
продолжительность смены; t
мет
— метеорологические потери; t
орг
— организационные потери; Кк
— коэффициент, учитывающий квалификацию механика и качество управления (Кк
= 0,9 ÷ 0,95).
Э к с п л у а т а ц и о н н у ю годовую п р о и з в о д и т е л ь н о с т ь
рассчитывают на 1 год работы списочной машины в составе парка, учитывая при этом внутрисменные перерывы для условий правильно организованного производства.
Для конкретных условий эксплуатационная годовая выработка машины,
3
м /год (т/год)
П
э, год
=П
э, ср-ч
Т
ч. г
k
года
(2.10)
где Т
ч. г
— число часов работы машины в году, определяемое по годовому режиму без учета внутрисменных простоев; k
года
— степень увеличения годовой производительности за счет лучшего использования машины (уменьшение простоев и повышение эксплуатационной часовой производительности).
Маневренность машины
— это способность работать и передвигаться в стесненных условиях, разворачиваться на месте. Иногда маневренности придают более широкое значение, отвечающее скорее свойству, называемому подвижностью.

Рис. 2.3. Дорожный просвет, продольный и поперечный радиусы проходимости колесных машин
П о д в и ж н о с т ь м а ш и н ы — способность передвигаться как по строительному участку, так и вне него. Подвижность определяется скоростью движения, рабочей и транспортной проходимостью, устойчивостью при движении и работе, габаритом машины и другими параметрами.
П р о х о д и м о с т ь м а ш и и ы — способность преодолевать различные неровности местности, соизмеримые с размерами ходовой части, проходить по влажным и рыхлым грунтам, преодолевать неглубокие водные преграды. Она определяется силой тяги, средним удельным давлением по грунту, величиной дорожного просвета С
и углами переднего и заднего свеса р1 и р2 (рис. 2.3) или, как их обычно называют, углами въезда и съезда, а у машины с колесным ходом, кроме того, — количеством ведущих осей, диаметром, числом и расположением колес, давлением на грунт, формой протектора шин, продольными и поперечными радиусами проходимости р1
и р2
, минимальным радиусом поворота и т. д.
Для машин с гусеничным ходом среднее удельное давление на грунт, кгс/см2
(МПа)
P
ср
= G
/ naL
где G
— масса машины, кгс (Н); п
— количество гусениц; а
— ширина гусеницы, см (м); L
— длина опорной поверхности гусеницы, см (м).
Среднее удельное давление отвечает условиям, когда центр тяжести машины и результирующая от внешних сил расположены симметрично относительно гусениц. Однако фактически эти силы расположены несимметрично, что приводит к повышению удельных давлений по сравнению со средними значениями в 1,2—2 раза.
У некоторых машин (экскаваторов, кранов, бульдозеров, корчевателей и др.) при работе смещение вертикальной составляющей веса и внешних нагрузок приводит к выходу равнодействующей из ядра сечения опорной поверхности гусениц. В этом случае наибольшие удельные давления на грунт у двугусеничных машин могут превышать средние в 4—6 раз, у многогусеничных в 2—3 раза, у машин на шагающем ходу в 2 раза.
Во многих случаях действительная поверхность контакта меньше площади гусениц, что также повышает удельное давление по сравнению со средним значением рcр
.
Например, если величина смещения равна ¼
длины опорной поверхности гусениц, то длина поверхности контакта гусениц с грунтом уменьшается на 25%.
У колесных машин с пневматическими шинами величина удельного давления зависит от жесткости покрышки пневматической шины, давления внутри шины и физико-механических свойств грунта, кгс/см2
(МПа):
P
ср
= kp
в
,
(2.11)
где p
в
— давление воздуха в шине, кгс/см2
(МПа); k
—
коэффициент, учитывающий влияние жесткости покрышки пневматической шины (k
» 1,2
¸ 1,25).
Чтобы обеспечить проходимость машин по бездорожью, удельное давление должно быть не больше 1 кгс/см2
(0,1 МПа),
Дорожный просвет (клиренс) представляет собой расстояние от нижней точки машины до поверхности дороги. В зависимости от размеров продольной и поперечной базы машины (L
и В)
и назначения для движения по дорогам с покрытиями, грунтовым или бездорожью эта величина равна 280—600 мм. Клиренс связан с диаметром колеса и составляет в среднем 0,3 ¸ 0,4 диаметра. Если на пути имеются значительные неровности, то проходимость оценивают дополнительно продольным радиусом проходимости рх и поперечным радиусом проходимости р2
(рис. 2.3).
Величина рх есть радиус окружности, которая проходит через самую низкую точку шасси и касается переднего и заднего колес. Величина р2
есть радиус окружности, также проходящей через низкую точку шасси, но касающейся колес, находящихся на одной оси. Для большинства современных машин р
1
= 8 ¸ 10м, р
2
= 1,25 ¸ 1,35 м.
Возможность машины преодолевать канавы и неровности определяется помимо силы тяги еще положением ее центра тяжести, конструкцией и размерами ходовой части, а также углами въезда и съезда.
Для колесных машин наибольшая ширина преодолеваемой канавы составляет около половины диаметра колеса; для гусеничных машин она зависит от длины гусеничного хода и равна приблизительно 0,4 длины опорной поверхности гусеницы.
Схема действия сил на колесо при преодолении подобных препятствий колесной машины показана на рис. 2.4. В процессе преодоления препятствия в точке контакта А
возникает суммарная реакция N;
кроме того, на колесо действуют вертикальная нагрузка GK
п тяга Т,
приложенная к оси колеса О.
Уравнения равновесия имеют вид:
T - N sin a = 0; G
k
-N cos a = 0.
Маневренность машины зависит от ширины дороги и радиусов поворота. Эти величины характеризуют так называемую ширину габаритного коридора. Последняя имеет большое значение при перевозке с прицепами длинномерных конструкций. Ширину габаритного коридора можно определить графически (рис. 2.5).
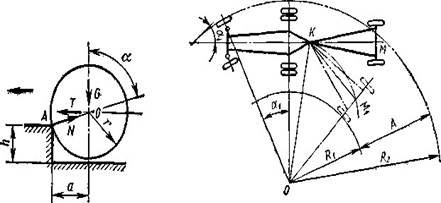
Рис. 2.4. Схема сил, действующих Рис. 2.5. Определение ширины габаритного коридора на колесо при преодолении препятствий
По известному предельному углу поворота управляемого колеса машины а
1
находят центр поворота О
.
На прямой, соединяющей точку О
с центром шарнира прицепа К
,
как на диаметре строят полуокружность радиусом, равным ОК
/2
. От центра шарнира прицепа делают на проведенной окружности засечку радиусом, равным расстоянию от центра шарнира до оси колес прицепа, т. е. КМ
= КМ
1
.
Соединив точки К
и M1
,
вычерчивают контур прицепа. После этого строят окружность радиусом R1
касательную к колесу прицепа, и окружность радиусом R2
,
касательную к колесу машины. Ширина А
габаритного колеса должна быть всегда меньше ширины дороги как на прямых участках, так и на уширениях дороги, которые делаются на кривых участках.
Устойчивость машины
— ее способность сохранять свое положение в пространстве относительно опор независимо от различных сочетаний действующих нагрузок. Поэтому на устойчивость влияют расположение опор и различные сочетания силовых факторов, действующих на машину в том или ином ее положении относительно горизонтальной плоскости.
Некоторые схемы расположений опор показаны на рис. 2.6. Прямые, соединяющие точки приложения реакций на опорах, называются ребрами опрокидывания
,
а плоскость, ограниченная этими ребрами, называется опорным контуром
.
Сама опорная поверхность (поверхность расположения опор), как правило, принимается наклонной к горизонту на расчетный угол а, который зависит от типа машины и характера ее эксплуатации.
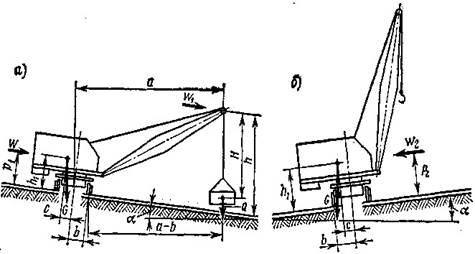
Рис. 2.6. Схема к расчету устойчивости крана
Силовые факторы при расчете на устойчивость разделяются на факторы, способствующие опрокидыванию и удерживающие машину от опрокидывания. Численные значения этих факторов определяются как удерживающие или опрокидывающие моменты относительно расчетного ребра опрокидывания.
За расчетное ребро опрокидывания принимается такое, для которого отношение удерживающего момента к опрокидывающему — минимальное. Сами силовые факторы могут быть как статические (не меняющиеся во времени), так и динамические — изменяющиеся во времени. Поэтому и расчеты' на устойчивость разделяются на статические и динамические. Кроме того, устойчивость рассчитывают для различных сочетаний силовых факторов (рабочее состояние — при наличии рабочих нагрузок — при отсутствии рабочих нагрузок). В первом случае говорят о грузовой устойчивости, во втором — о собственной устойчивости.
Во всех случаях количественная сумма устойчивости дается с помощью коэффициента устойчивости k = М
уд
/ М
опр
,
где Муд
— суммарный удерживающий момент, кгс*м (Н*м); Mопр
—
суммарный опрокидывающий момент, кгс*м (Н*м).
Величина k
зависит от типа машины, вида устойчивости (статическая, динамическая, грузовая, собственная) и задается различными нормативными документами (ГОСТами, ОСТами). Минимальное значение k
=
1,154 ¸ 1,25.
В качестве примера даны схемы стрелового крана для расчета на грузовую устойчивость (рис. 2.6, а
) и на собственную устойчивость (рис. 2.6, б), а также силы, действующие на кран: Q
— масса поднимаемого груза; W1
и W2
— ветровые нагрузки; a, b, h, h1
, с, Н, р1
и р2
— размеры для определения плеч относительно ребра опрокидывания.
СИЛОВЫЕ УСТАНОВКИ (ПРИВОДЫ)
Силовая установка — та часть машины, которая приводит в движение механизмы машины. Она представляет собой агрегат, состоящий из двигателя и вспомогательных систем: питания (топливный бак фильтры, трубопроводы), охлаждения (водяной насос, радиатор трубопроводов), управления (рычаги управления режимом двигателя, охлаждения), смазки. К сборочным единицам силовой установки относят также подмоторную раму.
Силовые установки с одним двигателем и комбинированные.
На установках с одним двигателем применяют следующие двигатели: внутреннего сгорания, дизельные или карбюраторные, электрические постоянного и переменного тока, пневматические. Установки с комбинированным приводом бывают электрические по системе генератор — электродвигатель, дизельэлектрические, дизель-гидравлические, дизель- пневматические.
Приводы одно- и многомоторные.
В одномоторном приводе одна силовая установка приводит в движение все механизмы. При таком приводе включают и выключают отдельные механизмы машины при помощи различных конструкций муфт, чаще всего фрикционных. При многомоторном приводе каждый механизм или группа их приводятся в движение отдельными двигателями. Чаще всего на машинах с многомоторным приводом двигатель внутреннего сгорания приводит в движение электрогенератор, который питает электроэнергией электроприводы отдельных механизмов. Двигатель внутреннего сгорания может приводить в движение гидронасос, который подает жидкость к гидродвигателям отдельных механизмов.
Достоинством одномоторного привода является то, что масса этого привода меньше, чем суммарная масса приводов многомоторного привода, а изготовить его проще и дешевле.
В многомоторном приводе можно регулировать работу отдельных механизмов независимо друг от друга, значительно сократить количество трансмиссий, легче осуществить автоматизацию. Эти преимущества позволяют все более широко применять машины с многомоторным приводом, особенно в связи с усовершенствованием конструкции гидропривода, при котором масса многомоторных приводов приближается к массе одномоторного привода вместе с трансмиссиями.
Недостаток одномоторного привода состоит в том, что при нем требуется большое количество трансмиссий, чтобы осуществить передачу движения отдельным механизмам. Кроме того, при одномоторном приводе нельзя получить независимое распределение мощности между приводимыми в движение механизмами.
Привод, а следовательно, и двигатель выбирают с учетом характера изменения рабочих нагрузок. Режим машины зависит от величины амплитуды и частоты колебаний нагрузки, количества включений в единицу времени, реверсивности и продолжительности непрерывной работы.
Различают четыре режима работы:
1. легкий режим работы — отношение максимальной нагрузки к средней составляет 1,1 : 1,3; скорость рабочих движений постоянна, нет реверсивности рабочих движений; число включений в 1 ч составляет 20—30, редко 50. С такими режимами работают машины для уплотнения грунтов (кроме вибрационных): бетоносмесители, растворосмесители, цилиндрические грохоты, транспортеры. Для привода этих машин можно применять любые двигатели;
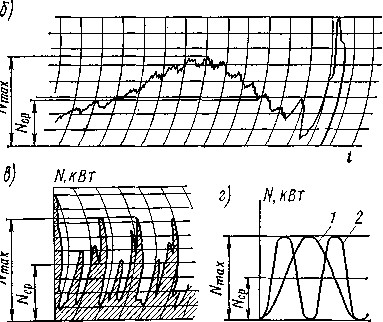
Рис. 3.1. Нагрузочные диаграммы при различных режимах работы машины:
б — средний; в
— тяжелый; г
— очень тяжелый; 1
— частота колебаний машины; 2
— изменение мощности
2) средний режим работы (рис. 3.1, б)
— отношение максимальной нагрузки к средней составляет 1,5 : 2,5; скорость рабочих движений переменна, движения редко реверсивны; число включений в 1 ч достигает 200. На таких режимах работают скреперы, тягачи, грейдер-элеваторы, дробилки, краны, многоковшовые экскаваторы и погрузчики;
3) тяжелый режим работы (рис. 3.1, в
) — отношение максимальной нагрузки к средней составляет 2 : 3, нагрузка имеет частые и резкие пики; скорости рабочих движений меняются прерывно, движения часто реверсивны; число включений в 1 ч до 1000 и более. На таких режимах работают одноковшовые экскаваторы, бульдозеры, толкачи и др.;
4) очень тяжелый режим работы — носит ударный или вибрационный характер (рис. 3.1, г).
Целесообразность применения того или иного двигателя для работы при различных режимах нагружения определяют с помощью механической внешней характеристики. Кривую, построенную в координатах М
и п
,
где М
— крутящий момент; п
— частота вращения; М = f (n)
называют механической внешней характеристикой. По этой зависимости каждому значению частоты вращения в минуту соответствует одно значение крутящего момента.
Как известно, произведение Мп
пропорционально мощности, развиваемой двигателем. Поэтому наилучшей характеристикой являлась бы такая, при которой для всех значений частоты вращения мощность оставалась постоянной, т. е.
N = АМп = Af (n)
= const,
где А
—
коэффициент пропорциональности.
Кривая внешней характеристики, отвечающая этому требованию, представляет собой гиперболу (кривая 1
на рис. 3.2).
Реальные внешние характеристики обычно существенно отличаются от формы гиперболы и представляют собой ломаные или плавные кривые, имеющие характерные точки номинального режима, у которых с увеличением частоты вращения п
момент М
обычно уменьшается
(падающие кривые).
М, кгс*м (Н:м)
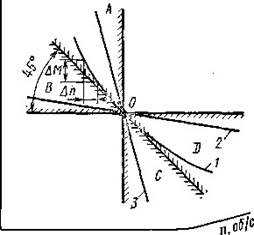
Рис. 3.2. Внешние характеристики
Если сравнивать различные характеристики, имеющие одну и ту же точку номинального режима (точка О
на рис. 3.2), то их можно условно разбить на следующие категории: проходящие в зонах А
и С
— жесткие, в зонах В
и D
— так называемые мягкие.
Мягкие характеристики находятся в пределах, ограниченных горизонталью и прямой, проходящей через точку О
под углом 45° к горизонту, жесткие характеристики — между вертикалью и той же прямой. Например, оптимальная характеристика (кривая 1
) в верхней части является жесткой, а в нижней — мягкой; характеристика по кривой 2
полностью мягкая, а характеристика в соответствии с кривой 3
— жесткая.
При большом изменении частоты вращения момент у мягких характеристик меняется незначительно; у жестких картина обратная: малому изменению частоты вращения соответствует существенное изменение крутящего момента.
Жесткость характеристики определяется по формуле
\
b\ = dM / dn =
∆M /
∆n.
(3.1)
Характеристики, для которых b®∞, называют абсолютно жесткими (вертикальная прямая на рис. 3.2); при b = 40 ¸ 10 — жесткими (прямая 3);
при b < 10 — мягкими (прямая 2
на рис. 3.2).
Механическая характеристика позволяет определить не только изменение момента от частоты вращения, но и такие качества двигателей, как запас крутящего момента, определяемого коэффицнентом k
зап, который находят по коэффициенту запаса крутящего момента:
k
зап
=M
max
- M
н
/ M
max
* 100%.
По этой характеристике можно судить о приспособляемости двигателя, которую определяют по коэффициенту приспособляемости
k
п
= M
max
/ M
н
.
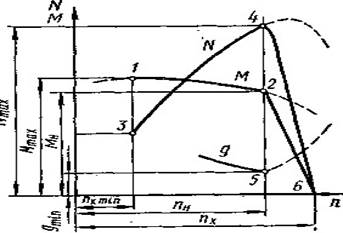
Рис. 3.3. Зависимости мощности, крутящего момента, расхода горючего и КПД двигателя внутреннего сгорания от частоты вращения:
1, 2, 6
и 3, 4, 6 —
участки кривых, показанные сплошными линиями, соответствуют регуляторной характеристике двигателя
Чем мягче характеристика, тем шире пределы изменения частоты вращения двигателя при изменении нагрузки, т. е. способность автоматически снижать частоту вращения при перегрузке с плавным увеличением крутящего момента.
Двигатели внутреннего сгорания являются основным приводом всех транспортных землеройных и землеройно-транспортных машин. Эти двигатели разделяют на два типа: дизели, работающие на тяжелом дизельном топливе, и карбюраторные, работающие на бензине. Основное преимущество этих двигателей состоит в том, что для них не требуется внешних источников питания.
На рис. 3.3 показана механическая характеристика двигателя внутреннего сгорания.
Дизели имеют регуляторы, которые регулируют количество подаваемого топлива, поддерживая постоянную частоту вращения. Настраивают регуляторы таким образом, чтобы двигатель развивал максимальную мощность Nmax
(точка 4)
при минимальном расходе топлива (точка 5). В этом случае Nmax
называют номинальной мощностью Nн
,
а частоту вращения и крутящий момент, соответствующие этой мощности, считают номинальной частотой вращения п
н
и номинальным крутящим моментом М
н
.
Недостатком этих двигателей является большая чувствительность к перегрузкам. Для карбюраторных двигателей k
п
= 1,15 ¸ 1,95, а для дизелей k
п
= 1,01 ¸ 1,1. Частота вращения холостого хода составляет примерно 1,1 ¸ 1,15 от частоты вращения, соответствующей частоте вращения при номинальной мощности. Частота вращения, соответствующая максимальному крутящему моменту, n
M
max
= 0,6n
н
Минимальная частота вращения холостого хода n
Xmin
= (0,3
¸ 0,5)n
н
.
К недостаткам двигателей внутреннего сгорания надо также отнести высокую стоимость эксплуатации и сравнительно малую долговечность — до 4000 ч работы.
Двигатели внутреннего сгорания применяют как с непосредственной механической передачей, так и с гидромуфтами и гидротрансформаторами, обеспечивающими защиту двигателя и всей конструкции от внешних перегрузок и сглаживающими расхождения между выходной характеристикой двигателя и требованиями, вытекающими из режима работы рабочего органа.
Электродвигатели переменного тока.
Такие двигатели особенно широко применяют в качестве привода стационарных строительных машин (бетоносмесителей, дробилок и др.). Этот вид силового оборудования отличает простота управления и обслуживания, малая стоимость, надежность в эксплуатации, способность выдерживать большие кратковременные перегрузки и возможность питания от обычной электросети. Для машин, имеющих повторно-кратковременный режим работы (например, дробилок), применяют электродвигатели с коэффициентом приспособляемости k
п
= 3.
Применить эти двигатели для непосредственного привода землеройных, землеройно-транспортных и других машин, требующих регулирования частоты вращения в зависимости от нагрузки, не удается, так как внешняя характеристика их является весьма жесткой.
Электродвигатели постоянного тока.
Они имеют мягкую внешнюю характеристику и являются наиболее пригодными для привода многих карьерных машин. Недостаток их заключается в том, что такие двигатели не могут питаться от общей сети переменного тока.
Для получения источника постоянного тока требуются комбинированные установки, в которых генераторы постоянного тока приводятся в движение двигателем внутреннего сгорания или электродвигателем переменного тока. Поэтому габариты и масса такого комбинированного привода в 1,5—2,5 раза больше, чем у любого другого привода. Несмотря на этот крупный недостаток, такие комбинированные установки широко применяют как в одномоторном, так и многомоторном приводе.
Комбинированные дизель-гидравлические приводы.
Они состоят из дизеля и гидродинамической передачи в виде гидромуфты или гидротрансформатора.
Г и д р о м у ф т а
(рис. 3.4) состоит из колеса / центробежного насоса, соединенного с ведущим валом 2,
и колеса 5
центростремительной турбины, соединенного с ведомым валом 3.
Колеса 1 и 5
размещены в общем корпусе 4,
замкнутом уплотнением. Между валами насоса и турбины имеется зазор. Корпус гидромуфты заполнен жидкостью. Передача момента М1
,
развиваемого двигателем, на ведомый вал в гидромуфтах осуществляется потоком жидкости. При вращении насосного колеса лопатки насоса увлекают жидкость и перемещают ее к периферии рабочей полости. Из насосного колеса поток поступает на лопатки турбинного колеса. Силы, возникающие при обтекании лопаток турбинного колеса, образуют момент М2
,
направленный в ту же сторону, что и вращение двигателя.
В гидромуфте между насосным и турбинным колесами отсутствуют какие-либо элементы, способные изменить момент количества движения потока. Поэтому, если не учитывать момент, передаваемый посредством трения, приближенно принимают М
1
= М
2
= М.
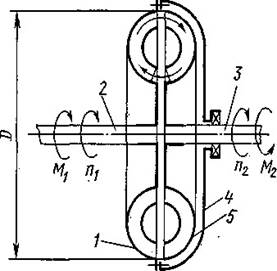
Рис. 3.4. Схема гидромуфты
Поскольку рассчитывать характеристику гидромуфты можно только приближенно, ее получают опытным путем. Для этого насосное колесо приводят в движение с постоянной частотой вращения п
1
нагружая одновременно вал турбинного колеса различными величинами крутящего момента. При этом между насосным и турбинным колесами возникает скольжение. С увеличением момента на валу турбинного колеса увеличивается также момент на валу насосного колеса М
1
= М
2
= М,
но при этом частота вращения п
2
на валу турбинного колеса уменьшается. Отношение п
2
/ n
1
= i
называют передаточным отношением гидромуфты.
КПД гидромуфты равен отношению мощности на ведомом колесе, т. е. на турбинном, к мощности на ведущем колесе (насосном). Так как моменты на этих колесах одинаковы, то
h = N
/ N
= M
w / M
w = n
/ n
= i
2 1 2 2 1 1 1 2
где n
1 п
2 — частота вращения ведомого и ведущего колес.
Следует выбирать гидромуфту и работать на таких режимах, чтобы КПД был максимально возможным. Скольжение между колесом насоса ях и турбиной п
2
характеризуется относительной разностью этих частот вращения:
S
= (n
1
- n
2
)/n
1
(3.3)
Величина S характеризует долю потерь в балансе энергии гидромуфты:
S
= n
1
- n
2
/ n
1
= N
1
- N
2
/ N
1
= 1 -
h (3.4)
На рис. 3.5 показана характеристика гидромуфты (кривая 1
). Она строится в безразмерных величинах. По вертикали отложен момент в долях единиц величины крутящего момента, а по горизонтали — передаточное отношение i.
Из этой характеристики видно, что с увеличением момента передаточное отношение уменьшается, т. е. частота вращения п2
падает.
На этом же рисунке приводится кривая 2,
которая показывает, что КПД с увеличением момента также падает, так как увеличивается скольжение.
Гидромуфты подбирают таким образом, чтобы при номинальном моменте КПД было не меньше 0,85 ¸ 0,9.
Приводы с гидромуфтами обеспечивают запуск двигателя при включенной передаче, снижают динамическую нагрузку в системе, защищают двигатель от перегрузок, обеспечивают плавность разгона машины при запуске и при уменьшении нагрузки, а также плавное стопорение при возрастании нагрузки. Недостатки гидромуфты состоят в сильном снижении КПД при увеличении скольжения, а также в невозможности изменения величины передаваемого крутящего момента двигателя в зависимости от нагрузки.
Гидромуфты целесообразно применять для машин и механизмов, у которых колебания нагрузки значительны, но перегрузки бывают редко.
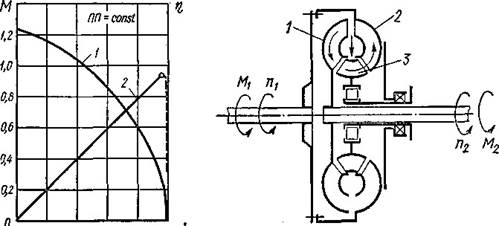
0,1 0,4 0,6 0,8 1,0 i
Рис.3.5 Внешняя характеристика Рис.3.6 Схема гидротрансформатора гидромуфты
Г и д р о т р а н с ф о р м а т о р ы
также применяют для автоматического регулирования крутящего момента и частоты вращения ведомого вала в зависимости от нагрузки. Они отличаются от гидромуфт тем, что кроме насосного колеса 2
(рис. 3.6) и турбинного колеса 1
между ними в рабочей полости устанавливают лопастные колеса реактора — так называемый направляющий аппарат 3.
Жидкость из турбинного колеса попадает на лопатки реактора. Реактор, отклоняя жидкость своими лопатками, изменяет момент количества движения потока. Поэтому в гидротрансформаторе моменты количества движения за турбинным колесом и перед входом в насосное колесо не равны друг другу, как в гидромуфте. Вследствие этого момента М2
,
развиваемый турбинным колесом, превосходит момент М1
сообщаемый двигателем насосному колесу, т. е. М2
> M1
,
значит, гидротрансформатор работает как редуктор.
Если валы вращаются в одну сторону, то согласно закону сохранения энергии n
2
< n
1
, а передаточное отношение i =
( n
2
: n
1
) < 1.
На рис. 3.7 приведены характеристики гидротрансформатора M1
и М2
в зависимости от частоты вращения п2
или передаточного отношения i.
Характеристику гидротрансформатора получают также опытным путем. Из рассмотрения характеристик гидротрансформатора следует, что чем больше момент М2
на валу турбинного колеса, т. е. чем больше сопротивление, тем меньше частота вращения п2
,
а следовательно, и i
. Величина КПД h = N
т
/ N
н
= M
2
n
2
/M
1
n
1
(3.5)
Пневматические установки.
Их применяют для подачи сжатого воздуха, приводящего в движение механизированный строительный инструмент. Энергия сжатого воздуха используется также для транспортирования строительных материалов, в механизмах для нанесения покрытий, в пескоструйных аппаратах и др. Обычно такие установки состоят из двигателя внутреннего сгорания или электродвигателя, приводящего в движение компрессоры поршневого или ротационного типа.
Строительные компрессоры чаще всего монтируют на специальной раме и перемещают с помощью автомобиля или трактора.
В строительстве применяют одноступенчатые и двухступенчатые компрессоры.
Компрессор двухступенчатого сжатия показан на рис. 3.8, а.
Коленчатый вал 9,
вращающийся от двигателя 10,
посредством шатунов 8
приводит в движение поршни 7 цилиндров первой ступени. При движении поршней вниз воздух засасывается всасывающими клапанами, как это показано стрелками, и проходит через фильтр 6.
При движении поршня вверх по достижении определенного давления воздух через выпускной клапан попадает в холодильник 4.
Из холодильника воздух всасывается поршнями второй ступени 1
, где после сжатия он выталкивается в ресивер 3.
На компрессоре установлены два предохранительных клапана 5
и 2
низкого и высокого давления, а также соответственно манометры 11
и 12.
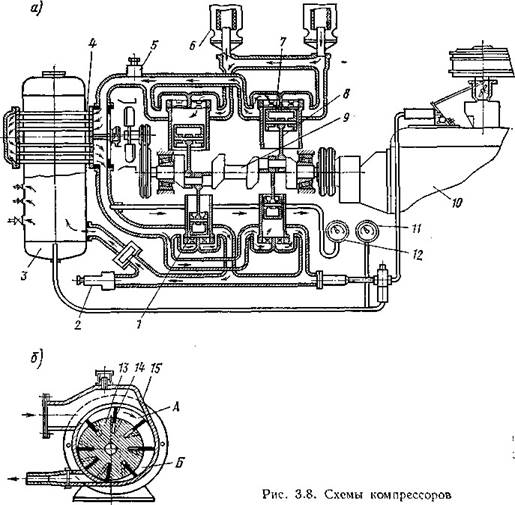
Компрессоры одноступенчатого сжатия создают давление 6— 7 кгс/см2
(0,6—0,7 МПа), производительность их достигает 0,15 м3
/с.
С помощью двухступенчатых компрессоров по сравнению с одноступенчатыми можно получить давление в 1,5—1,6 раза больше.
Производительность поршневых компрессоров (м3
/мин) засасываемых из атмосферы воздух, определяется зависимостью
Q
n
= F S k n z
ц
l,
(3.6)
2
где F
— площадь поперечного сечения поршня, м ;
F =
pd2
/ 4;
(3.7)
S
— ход поршня, м; l — коэффициент наполнения (
l = 0,65 ¸ 0,8); k
— объем засасываемого воздуха на один оборот коленчатого вала в одном цилиндре (для машин одинарного действия k
= 1, для машин двойного действия k
= 2); п
— частота вращения вала компрессора, об/мин; z
ц
— число цилиндров компрессора.
Ротационный компрессор (рис. 3.8) представляет собой корпус 15,
внутри которого эксцентрично вращается ротор 13.
На поверхности ротора в радиальном направлении сделаны прорези, в которые вставляются лопатки 14.
Последние прижимаются к внутренней поверхности корпуса центробежными силами. При вращении ротора вместе с лопатками воздух увлекается ими и перемещается из широкой полости А
в узкую полость Б.
В это время воздух сжимается и давление его повышается.
Ротационные компрессоры значительно проще по конструкции, чем поршневые; они равномернее подают воздух. К недостаткам их следует отнести меньший КПД, чем у поршневых компрессоров. Производительность ротационных компрессоров
Q
р
= l
(
pD — sz
п
)mn /
30
l м3
/мин,
(3.8)
где l
— длина ротора, м; D
— диаметр статора, м; s
— толщина пластинки, м; z
п — число пластинок; т
— эксцентриситет, м; п
— частота вращения, об/мин; l — коэффициент наполнения (А, = 0,8 ¸ 0,85).
Мощность ротационных компрессоров определяется так же, как и поршневых.
ТРАНСМИССИИ
Трансмиссии
— механизмы, передающие движение от силовой установки отдельным сборочным единицам (узлам) машины или от одной сборочной единицы к другой.
Трансмиссии не только передают движение, но и преобразуют (меняют) направление движения, скорости, моменты и усилия. В трансмиссии включаются элементы, предохраняющие двигатель и отдельные узлы от перегрузок. Различают механические, гидравлические и электрические трансмиссии.
Механические трансмиссии. Они состоят из различного типа зубчатых передач, коробок скоростей, валов, предохранительных и ограничительных муфт, реверсивных механизмов, тормозных устройств (см. далее кинематическую схему экскаватора на рис. 8.20).
Достоинствами механических трансмиссий являются большая надежность, сравнительно высокий КПД (0,8 ¸ 0,92), небольшая металлоемкость (например, на тягачах масса составляет 3,2—5,5 кг на 1 кВт), малая чувствительность к внешним температурам. Недостатки — невозможность бесступенчатого регулирования скорости. Для того чтобы трансмиссии были близки к бесступенчатым системам, необходимы коробки скоростей с большим числом передач, что усложняет конструкции коробок передач трансмиссии, увеличивает габариты, металлоемкость и снижает КПД. Кроме того, в механических трансмиссиях требуются оградительные устройства и необходимо наблюдение за смазкой опор трансмиссии.
Для расчета элементов трансмиссий строительных машин в связи со спецификой их работы предъявляется ряд требований к этим элементам. Например, муфту сцепления основного двигателя с трансмиссией рассчитывают на максимальный момент двигателя (М
mах) с коэффициентом запаса
k
зап
= М
расч
/ М
mах
= 1,3
¸ 1,5. (3.9)
Гидравлические (гидрообъемные) трансмиссии.
Движение от ведущего элемента к ведомому передается под воздействием перемещающейся
а) Нагнетание б) в)
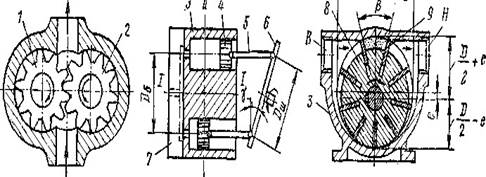
Всасывание
Рис. 3.9. Схемы гидравлических насосов:
а
— шестеренчатого; б
— аксиплыю-поршнепого; в
— лопастного (шиберного)
жидкости в замкнутом пространстве. Они состоят из гидронасосов, гидродвигателей объемного типа, распределительных устройств (золотниковых), предохранительных клапанов и трубопроводов.
Гидронасосы приводятся в движение от постороннего источника энергии, а гидродвигатели — за счет перемещения жидкости, подаваемой гидронасосом. Гидронасосы применяют шестеренчатые, аксиальнопоршневые и лопастные (рис. 3.9).
Гидродвигателями могут служить шестеренчатые, лопастные и поршневые насосы-гидромоторы. Эти гидродвигатели применяют в тех случаях, когда во вращательное движение необходимо приводить какой-либо механизм или исполнительный орган.
Если механизмам или исполнительным органам требуется сообщить возвратно-поступательное движение, применяют гидроцилиндры.
В качестве рабочей среды в гидравлических передачах применяют минеральные масла. Основными критериями при выборе масла для различных видов передач и условий работы являются вязкость, температура вспышки и температура застывания. Масла, применяемые для
гидравлических передач в
летнее время, могут иметь вязкость до 70 сст; при низких температурах (—50°С) — 10 ¸ 25 сст.
Температура вспышки масла, применяемого в летнее время, допускается до 200°С, а зимой — до 170° С. Температура застывания масла для летнего времени принимается до —10°С, а для зимнего времени — до —30°С
Шестеренчатый насос (рис. 3.9, а)
состоит из двух зубчатых колес, помещенных в плотно обхватывающий их корпус. Колесо 1
насоса приводится во вращение двигателем, колесо 2
сидит свободно на оси. В корпусе имеется канал, через который масло попадает в полость всасывания. При вращении шестерен масло, находящееся во впадинах, переносится из полости всасывания в полость нагнетания и выталкивается (выдавливается) в канал.
Эти насосы изготовляют для рабочих давлений в 100 кгс/см2
(10 МПа); производительность их 400—500 л/мин. Частота вращения электродвигателя таких насосов 2000 об/мин, хотя имеются специальные насосы с частотой вращения до 10 000 об/мин. Применяют их в передачах со сравнительно небольшими мощностями (до 30 кВт).
П о р ш н е в ы е н а с о с ы
подразделяют на аксиально-поршневые, радиально-поршневые и эксцентрикового типа. В строительных машинах чаще всего применяются аксиально-поршневые.
Аксиально-поршневой насос (рис. 3.9, б)
состоит из корпуса 3,
в котором по окружности диаметра D6
размещены цилиндры. Поршни 4
при помощи шатунов 5
шарнирно связаны с шайбой 6,
наклоненной к оси корпуса а
—а
под углом. Одновременное вращение корпуса относительно оси /—/ и наклонной шайбы относительно оси //—// приводит к возвратнопоступательному движению поршней.
За одну половину оборота блока цилиндров поршень совершает ход слева направо (всасывание), при этом полость цилиндра с помощью распределителя 7 сообщается с линией всасывания. За вторую половину оборота поршень совершает ход справа налево (нагнетание); в этом случае полость цилиндра при помощи распределителя 5
сообщается с линией нагнетания.
Аксиально-поршневые насосы можно в определенном диапазоне настраивать на разные производительности, для этого изменяют угол наклона шайбы у.
Широкое применение получили аксиально-поршневые насосы с автоматическим регулированием производительности (расхода).
Аксиально-поршневые насосы, рассчитанные на давление до 300 кгс/см2
(30 МПа), имеют производительность от 10 до 750 л/мин и частоту вращения приводного вала от 1000 до 3000 об/мин. Наибольшую частоту вращения имеют насосы с
наименьшей производительностью.
Ш и б е р н ы й ( л о п а с т н о й ) н а с о с
(рис. 3.9, е) состоит из корпуса 3
и размещенного в нем ротора 8.
В пазах ротора помещены лопасти 9,
имеющие возможность перемещаться в радиальном направлении. Лопасти захватывают масло, которое поступает в профильную полость всасывания В
между ротором и корпусом и подается к
отверстию нагнетания
Н
.
Эти насосы работают на давлениях до 100 кгс/см2
(10 МПа) и выше при частоте вращения приводного вала 1200—2000 об/мин. Они имеют производительность от 50 до 150 л/мин.
Все вышеперечисленные насосы можно применять и в качестве гидромоторов.
Производительность Q
(л/мин) всех перечисленных типов насосов зависит от объема рабочих камер q
,
заполняемых жидкостью за 1 оборот насоса, и от частоты вращения n
:
Q = qn
h ,
(3.11)
гдеh — объемный КПД (потери масла через зазоры).
В строительных машинах применяют гидросистемы с давлением масла до 200 кгс/см2
(20 МПа).
Диаметры цилиндров D
ц
могут быть от 40 до 220 мм, а длина хода — не
более 10 D
ц
.
Движущее усилие на штоке цилиндра, кгс/мм2
(Па)
P = pF
п
,
(3.12)
где F
п
— рабочая площадь поршня, мм2
; р
—давление в цилиндре, кгс/см2
(Па).
Скорость штока зависит от расхода масла Q
и рабочей площади поршня F
п
:
uц
= Q / F
п
(3.13)
Помимо гидронасосов и гидромоторов в системы гидротрансмиссий входят предохранительные, распределительные и регулирующие устройства, соединительная арматура, 'а также баки для жидкости и фильтры.
К этим устройствам относят предохранительные, редукционные, обратные клапаны, регуляторы скорости, гидрораспределители (дроссели).
Предохранительные клапаны
служат для снижения или прекращения подачи жидкости в линию нагнетания. Они имеют различные конструкции. Наиболее простая конструкция показана на рис. 3.11, а. Этот клапан состоит из регулировочного болта /, корпуса 2,
пружины 3,
шарика 5,
центрирующей шайбы 4.
Клапан устанавливается в магистрали нагнетания. Принцип действия клапана основан на уравновешивании силы давления жидкости, действующей на шарик, и усилия пружины 3.
Когда давление действующей на шарик жидкости больше, чем усилие сжатия пружины, открывается доступ жидкости к каналу слива С
, и давление в напорной линии Н
падает.
Редукционный клапан
(рис. 3.11,
б)
применяют в тех случаях, когда необходимо в линии нагнетания поддерживать постоянное давление независимо от развиваемого насосом давления. Клапан, так же как и предохранительный, ставится так, чтобы канал Б
был соединен с линией нагнетания. Жидкость из канала Б
поступает в канал А
через отверстия в корпусе 2.
Расход жидкости зависит от положения золотника 8.
Положение золотника регулируется разностью давлений на верхнюю и нижнюю торцевые поверхности. В начальный момент золотник находится в нижнем положении. Шариковый клапан 7 отрегулирован на давление, меньшее, чем на входе. Канал А
, т. е. линия нагнетания, соединен каналами с отверстием в золотнике. В отверстие золотника вставлена калиброванная втулка 6.
Когда давление в канале А
увеличивается,

Рис. 3.11. Предохранительные и регулирующие устройства Условные обозначения элементов гидропривода
повышается и давление на нижнюю поверхность золотника, он приподнимается и перекрывает отверстия для доступа жидкости из канала Б
в канал А.
Одновременно через канал в золотнике 8
жидкость попадает под шариковый клапан, открывает его, и жидкость, находящаяся над верхней полостью золотника, сливается в канал А.
При снижении давления в полости А
золотник снова опускается.
Обратные клапаны
предназначены для того, чтобы пропускать жидкость в трубопроводах только в одну сторону. По конструкции они делятся на шариковые и конусные, неуправляемые и управляемые. На рис. 3.11, в
показан неуправляемый обратный клапан. В штуцере 9
с седлом 10
установлен шарик 5,
который прижимается к седлу слабой пружиной 3.
Под давлением подаваемой в канал А
жидкости шарик 5
сжимает пружину и открывает доступ жидкости в полость Б.
Движение жидкости в обратном направлении невозможно, так как для этого необходимо, чтобы давление в полости Б
было больше, чем в полости А
, но в этом случае шарик 5
закрыл бы отверстие в седловине 10.
Дроссели
(рис. 3.11,
г)
служат для регулирования расхода жидкости. Для этого на пути движения жидкости устраивают сопротивление, которое изменяет сечение проходного отверстия, благодаря чему изменяется расход жидкости. Дроссели подразделяются на управляемые (проходное сечение дросселя в процессе работы может быть увеличено или уменьшено машинистом) и неуправляемые (при работе проходное сечение дросселя остается постоянным).
Регуляторы скорости
служат для регулирования скорости гидродвигателей. Регулятор (рис. 3.11, д
) состоит из корпуса 2,
редукционного клапана 7, дросселя 11
. Жидкость, подаваемая из канала А,
проходит к каналу Б
через отверстия в корпусе и дроссель 11
.
Постоянное давление в канале Б
поддерживается редукционным клапаном. Если давление в канале Б
увеличивается, то жидкость, подаваемая через канал Г
к верхней полости редукционного клапана, перемещает его вниз и перекрывает доступ жидкости из канала А
в канал Б.
Расход регулируется установкой дросселя 11
посредством поворота рукоятки 12.
Распределители
служат для управления потоком жидкости. Различают золотниковые, клапанные и крановые распределители. Наиболее часто применяют золотниковые распределители. Они состоят из одного золотникового распределителя или целого блока.
На рис. 3.11, е
приводится одна из схем распределителя. Золотник 1
можно перемещать в осевом направлении в корпусе 2.
В корпусе сделано пять отверстий: одно отверстие Н
для подачи жидкости, два отверстия С
1
и
С
2
для слива и отверстия А
и Б
для подачи жидкости в гидроцилиндр. В положении IV
отверстия А
и Б
перекрыты, и вся жидкость, подаваемая насосом через обратный клапан, сливается в бак. В положении 11
жидкость подается в отверстие Б,
а сливается из отверстия А.
В положении 1
жидкость подается в отверстие А
и сливается из отверстия Б.
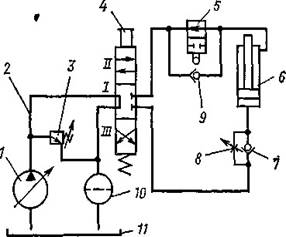
Рис. 3.12.
Система управления с гидравлическим приводом
Диаметр трубопроводов должен приниматься таким, чтобы скорость v
жидкости в напорных трубопроводах была не более 8 м/с, в сливных трубопроводах — не более 5 м/с, а во всасывающих — не более 1,5 м/с.
На рис. 3.12 приводится одна из схем гидропривода стрелоподъемного механизма стрелового крана, включающая элементов гидросистемы.
Подъем и опускание стрелы производится при помощи гидроцилиндра 6,
жидкость подается насосом / в магистраль 2.
При нейтральном положении / золотника распределителя 4
жидкость через клапан 3
и фильтр 10
поступает обратно в бак 11.
При переводе распределителя 4
в положение 11
жидкость через обратный клапан 7 поступает в подпоршневую полость цилиндра 6
и перемещает поршень со штоком, поднимая стрелу. Во время подъема поршня жидкость, находящаяся в надпоршневой полости, сливается в бак через клапан 5.
Если на штоке поршня возникает усилие, для преодоления которого требуется давление большерасчетного, то подаваемая насосом жидкость сливается обратно в бак 11
через предохранительный клапан 3.
ТРАКТОРЫ
Гусеничные и колесные тракторы агрегатируют с землевозами, трайлерами и различными видами тележек, кроме того, их используют в качестве буксирных средств.
Колесные тракторы
более мобильны, чем гусеничные, могут развивать большую скорость — до 40 км/ч. Они наиболее эффективны на дорогах с твердым покрытием. При перевозке по неподготовленным, временным
дорогам выгоднее использовать гусеничные тракторы,
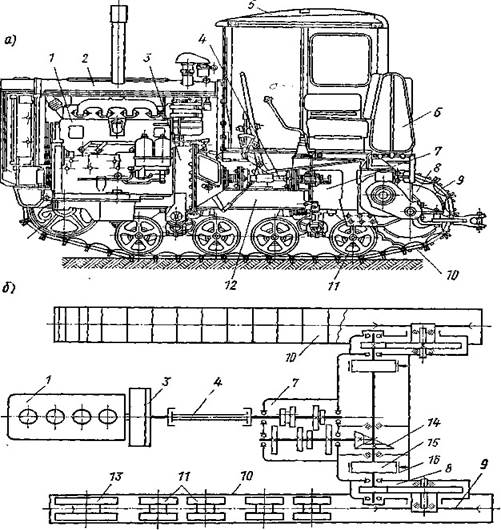
Рис. 4.2. Гусеничный трактор:
а —
общий вид трактора; б — кинематическая схема; / — силовая установка; 2 —
капот; 3 —
муфта сцепления; 4
— карданный вал; 5
— кабина; 6
— топливные баки; 7 — коробка передач; 8
— бортовая передача; 9
— ведущая звездочка; 10
— гусеничная цепь; 11
— опорные катки; 12
— рама; 13
— направляющее колесо; 14
— центральная передача; 15 —
бортовой фрикцион; 16
— тормоз
которые имеют лучшую проходимость. Их скорость не превышает 12 км/ч. 2
Удельное давление на грунт гусеничных тракторов 1 кгс/см (0,1 МПа), у
2
колесных тракторов — около 2,5—3,5 кгс/см (0,25—0,35 МПа). Сила тяги гусеничных тракторов примерно равна их массе, а колесных — только половине массы.
Различают тракторы общего назначения, мелиоративные, карьерные, малогабаритные и специальные — для работы с отдельными типами машин.
Главным параметром тракторов является номинальное тяговое усилие.
Гусеничные тракторы выпускают следующих тяговых классов: 30; 40; 60; 250; 350 кН, колесные тракторы: 9; 14; 35; 100 кН. Основные параметры тракторов приведены в табл. 4.1.
Таб лица 4.1 Основные параметры тракторов
| Параметры
|
Виды
тракторов
|
| гусеничные
|
колесныe
|
| колесные
|
| Мощность двигателя, л.
с.
(кВт)
Количество передач:
|
75—500 (~65—420)
|
40—200 {—35—160)
|
75—240
|
| (~65—200)
|
| вперед назад
|
3—9
1—4
|
4—18
2—8
|
3—5
|
| 1—2
|
| Скорость движения, км/ч:
|
| вперед
|
2,4—17,6
|
1,6—39,8
|
4,0—55
|
| назад
Удельное 2
кгс/см
(МПа):
|
давление,
|
2,0-14,6
|
1,6—40,8
|
4,5-21,2
|
| гусениц
|
0,3—0,57 (0,03—0,057)
|
—
|
—
|
| в шинах
|
—
|
0,8—5,0
(0,08—0,5)
|
2,5-3,5
|
| (0,25-0,35)
|
| Дорожный
(клиренс),
|
просвет
|
280—570
|
0,8—5,0
|
2,5-3,5
|
| мм
Масса, кг
|
6350—35 000
|
2600—12 000
|
| 7500—12 500
|
Общий вид и схема гусеничного трактора показаны на рис. 4.2.
Кроме этих параметров тракторы и тягачи характеризуются видом трансмиссии — механическая, электромеханическая и гидромеханическая; конструкцией подвески — балансирная с каретками, полужесткая, эластичная и др. Все рассматриваемые транспортные машины могут иметь различное расположение кабины — заднее, переднее и среднее.
АВТОМОБИЛИ
Автомобили являются не только транспортными средствами, но и базовыми машинами, на которых монтируют краны, буровые установки, монтажные вышки, ремонтные мастерские и другое оборудование. Средняя грузоподъемность парка автомобилей в строительстве составляет примерно 4,6 т. Увеличение этой грузоподъемности до 10—11 т за счет увеличения удельного веса большегрузных автомобилей в ближайшие годы позволит снизить стоимость перевозок в два раза.
В зависимости от типа двигателя различают автомобили карбюраторные, дизельные, газогенераторные и газобаллонные
.
Современные грузовые автомобили, начиная с грузоподъемности 5 т, выпускаются почти исключительно с дизелями.
По назначению автомобили делятся на бортовые, автосамосвалы, специализированные
(автоцементовозы, автоцистерны, панелевозы и др.).
Главным параметром автомобиля, определяющим конструкцию его основных узлов, является нагрузка на ведущий мост. Грузоподъемность при нормальной эксплуатации меняется в зависимости от числа осей. Для дорог с обычным и усовершенствованным покрытием допускаемая нагрузка на ось соответственно 6 и 10 т (60 и 100 кН). Для обозначения грузовых автомобилей принята формула, соединяющая знаком умножения две цифры: первая — количество колес, вторая — количество ведущих колес (двойные скаты считаются за одно колесо). Обычный грузовой автомобиль имеет формулу 4 х 2, трехосный с двумя ведущими осями — 6 x 4 и т. д.
Автомобили общего назначения выполняют двухосными с задней ведущей осью, снабженной двускатными колесами. Они оборудуются кузовами общего назначения (бортовые автомобили) или саморазгружающиеся (самосвалы), а также другим специальным оборудованием. На их базе заводы выпускают специальные модификации автомобилей соответствующей грузоподъемности, в том числе седельные тягачи для работы с полуприцепами, многоосные автомобили и др. Для строительства нерационально применять автомобили грузоподъемностью менее 5 т. Для перевозки массовых грузов целесообразны автомобили средней и большой грузоподъемности.
Повышение грузоподъемности благодаря дополнительным осям, прицепам и полуприцепам увеличивает длину и значительно ухудшает маневренность автомобиля. Но при хороших дорожных условиях и особенно при перевозке на большие расстояния использовать полуприцепы и прицепы очень выгодно. Однако увеличение грузоподъемности таким способом требует применения двигателей повышенной мощности.
Увеличение числа ведущих осей несколько усложняет конструкцию и повышает вес и стоимость автомобиля. Для обеспечения хороших транспортных качеств при работе с полуприцепами и прицепами средняя мощность автомобилей при нагрузке на ось 18—6 тс (180—60 кН), отнесенная к 1 тс общего веса с грузом, должна составлять соответственно 7—16 л. с. (»6—13 кВт), т. е. больше для машин меньшей грузоподъемности.
В последнее время в строительстве вместо транспортных автомобилей применяют специальные большегрузные автомобили. Они более приспособлены к тяжелым условиям строек, а унифицированные узлы,
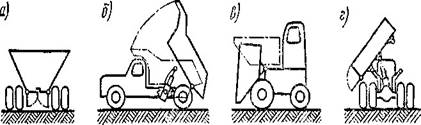
Рис. 4.4. Схема разгрузки самосвалов и землевозных тележек
входящие в состав различных строительных машин, облегчают эксплуатацию и ремонт строительного и транспортного оборудования.
Большое применение в строительстве имеют самосвалы и землевозные тележки, применяемые для всех видов сыпучих грузов. Количество самосвалов в автопарке строительства достигает 60%.
Различают следующие типы самосвалов и тележек: 1) донные (рис. 4.4,
а),
разгрузка которых осуществляется раскрытием створок днища; их применяют для разгрузки в бункера и с эстакад; 2) с задней (рис. 4.4, б)
или передней (рис. 4.4, в)
разгрузкой; передняя разгрузка осуществляется на машинах, у которых кузов находится впереди кабины водителя; 3) с боковой разгрузкой (рис. 4.4, г),
применяемые при массовых работах по разгрузке и поточном движении автомобилей. Реже используют трехстороннюю разгрузку, а также боковую одностороннюю.
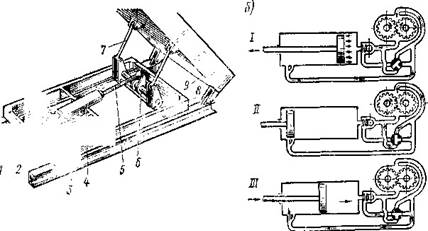
Рис. 4.5. Общий вид (а) и схема работы гидравлического подъемника самосвала (б):
/ - коробка отбора мощности; 2 -
насос; 3
- ось поворота цилиндра; 4 -
цилиндр:
5
- шток- 6 - устройство поворота тяг; 7
- тяги; 8
- нарамник; 9 -
платформа
1
- выдвижение штока и начало подъема платформы; 11
- конец подъема платформы,
111
— опускание платформы
Опрокидывается кузов самосвала обычно с помощью гидравлических цилиндров, простых или телескопических. Масло подается в гидроцилиндр масляным насосом, приводимым в действие от коробки отбора мощности. Шток цилиндра поднимает кузов автомобиля, шар-нирно закрепленный на раме. Опускается кузов под действием собственного веса, для чего открываются отверстия выпуска масла из цилиндра. Общий вид подъемника и гидравлическая схема его показаны на рис. 4.5.
Для перевозки деталей перекрытий, стеновых панелей и других подобных грузов применяют автосамосвалы со скользящим кузовом, который для разгрузки сначала выдвигается назад на половину своей длины, а затем поворачивается на угол до 42°. При этом одновременно машина движется вперед. В результате наклона детали сползают, а так как при выдвинутом и наклонном кузове нижний край кузова почти касается земли, то разгружаемые детали не ударяются о землю и не ломаются.
ТЯГАЧИ И ПРИЦЕПЫ
Тягачи представляют собой машины, специально приспособленные для работы с навесным и полуприцепным оборудованием. Их применяют также для подталкивания грузов или страховки тяжелых автопоездов на подъемах, спусках и уклонах. Тягач может быть гусеничным и колесным.

Рис. 4.6. Опорно-сцепные (седельные) и сцепные устройства:
/ _ опорная плита; 2 -
балансир; 3 -
ось балансира; 4 -
плита; 5
- замок; е
- запорный кулак; 7 -
рукоять; 8
- кронштейн; 9 -
шкворень, 10
- гидро цилиндр поворота тягача; 11
— ось
Если тягач предназначен для транспортных работ, то для этой цели используют автомобиль (обычно с укороченной базой) с опор-носцепным (седельным) устройством, установленным вместо снятого кузова. В этом случае чаще применяют опорно-сцепное устройство, установленное на тягаче с направляющими полозьями (рис. 4.6, а).
Седельно-сцепное устройство состоит из опорной плиты 1,
балансира с осями 2,
оси балансира 3, плиты 4
замка, выполненного в виде двух захватов 5, установленных на осях на плите. Захваты фиксируются запорным кулаком 6,
который перемещается с помощью рукояти 7.
Седельное устройство может качаться вокруг продольной горизонтальной оси 3,
что позволяет полуприцепу перекашиваться относительно тягача в вертикальной плоскости. Недостатки такого устройства заключаются в необходимости точно ориентировать полуприцеп относительно тягача при сцепке, больших силах трения в седле, что затрудняет сцепку на скользкой дороге, и применении значительного ручного труда при сцепке и расцепке.
Соединяется полуприцеп с тягачом вертикальным шкворнем (рис. 4.6, б).
Чтобы избежать заноса полуприцепа при торможении, особенно опасного при повороте, между тягачом и полуприцепом устанавливают стабилизаторы в виде горизонтальных гидроцилиндров, которые при торможении автоматически фиксируют положение полуприцепа. В горизонтальном положении полуприцеп после отцепки удерживается опорными катками, выдвигаемыми специальным устройством.
Для транспортирования агрегатов и аппаратов технологического и другого оборудования, собранного из крупных блоков массой до 500 т и более, применяют специальные прицепы (полуприцепы) — тяжеловозы, на которые устанавливаются лебедки и трапы для подтаскивания грузов.
В зависимости от грузоподъемности такие прицепы снабжаются двумя, четырьмя или шестью осями. Колеса их устанавливаются не на сплошные оси, а на короткие балансирные подвески, соединенные в систему, которая позволяет им «приспосабливаться» к неровностям дороги. Платформы прицепов-тяжеловозов могут опускаться с помощью гидравлических устройств, чтобы облегчить погрузку тяжелого оборудования так, что пол платформы отстоит от дороги на высоту ее балок 350—400 мм. Это особенно необходимо для погрузки своим ходом тяжелых строительных машин. Грузоподъемность прицепов-тяжеловозов доходит до 550 т.
При массовых перевозках грузов по хорошей дороге применяют поезда из автомобилей с полуприцепами и прицепами. Сцепные устройства автомобилей и тягачей для полуприцепов обычно бывают выполнены в виде крюка. Их недостатком является быстрый износ (после 10—15 тыс. км пробега), динамические нагрузки и неспокойный ход поезда вследствие зазоров, трудоемкость и опасность операций по сцепке — расцепке. Более совершенным приспособлением является тяговая вилка с поворотновыдвижным устройством (рис. 4.6, в).
Имеются сцепные устройства, обеспечивающие следование колес прицепа по колее задних колес автомобиля, что значительно упрощает управление поездом и увеличивает безопасность движения.
Большое применение в строительстве имеют специальные колесные тягачи. Их применяют в сочетании с полуприцепным, навесным или прицепным оборудованием. Они являются базовыми машинами для самых разнообразных колесных машин-орудий и очень большой номенклатуры машин специального агрегатирования. Такие тягачи можно собирать в различной компоновке из унифицированных сборочных единиц (рис. 4.7, а, в, г, д).
Их можно приспособить для разнообразных работ, так как они воспринимают значительные вертикальные

Рис. 4.7. Схемы агрегатирования тягачей для унифицированных узлов:
а
— одноосный; б
— сдвоенный по системе тандем из шарнирно-соединенных одноосных тягачей; в —
двухосный короткобазовый; г —
двухосный длиннобазовый седельный; д —
двухосный с шарнирной рамой; е
— то же, с двумя двигателями
и боковые нагрузки всеми осями и коробкой передач, часто имеющей одинаковые передачи переднего и заднего хода, а управление спроектировано так, что водитель с пультом может поворачиваться на 180°.
Существует несколько видов колесных тягачей. Одноосный тягач (рис. 4.7, а)
может самостоятельно передвигаться и выполнять какие-либо рабочие операции только с полуприцепами различного назначения, так как может поворачиваться под углом в 90° к продольной оси полуприцепа под действием двух горизонтальных гидроцилиндров 4
(рис. 4.8). Отличается высокой маневренностью, пригоден для агрегатирования с полуприцепами почти любого назначения, однако он не пригоден (без полуприцепа) для навесного оборудования и для скоростей более 60 км/ч вследствие значительных вредных для водителя колебаний, основным источником которых являются изменяющиеся нагрузки, передаваемые полуприцепом на тягач через сцепное устройство тягача 3.
Эти колебания только частично гасятся демпфированием сиденья.

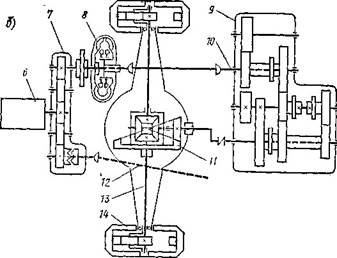
Рис. 4.8. Одноосный тягач:
а
— общий вид; б —
кинематическая схема; / — распределитель;2
— кронштейн; 3 —
сцепное устройство; 4
— гидроцилиндр; 5 — насос; 6 - двигатель; 7 — раздаточная коробка; 8
— турботрансфор-матор; 9
- коробка передач; 10 —
карданный вал; 11
_ главная передача с дифференциалом; 12
— карданный вал; 13
— полуось; 14
— конечная планетарная передача
В последнее время создан специальный демпфер в седловом устройстве, позволивший увеличить скорость хода одноосных тягачей до 65—75 км/ч. Это резко снизило эффективность применения скоростных двухосных тягачей, которые дороже и тяжелее одноосных. Осуществление привода осей полуприцепа позволяет увеличить сцепной вес машины, который без этого не превышает 55% общего веса агрегата. Нагрузка на седло тягача может превышать вес тягача в 1,5 раза. Одноосные тягачи могут агрегатироваться попарно по системе тандем, образуя модификации двухосного тягача с шарнирно-сочлененной рамой.
В отличие от одноосного двухосный тягач может передвигаться самостоятельно и агрегатироваться с навесным оборудованием и полуприцепами. Двухосные тягачи выполняются следующих типов.
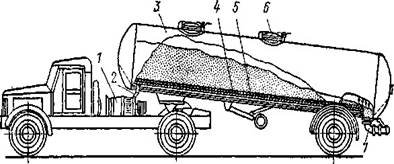
Рис. 4.9. Цементовоз:
1
— компрессор; 2
— шланг подачи воздуха; 3
— цистерна; 4
— аэролоток; 5
— пористая перегородка азролотка; 6
— загрузочный патрубок; 7
— разгрузочный патрубок
1. Двухосные короткобазные тягачи (см. рис. 4.7, в)
с приводом на обе оси; они имеют передние или задние колеса поворотными при одной управляемой оси или очень редко все колеса поворотными; обладают меньшей маневренностью, однако 85% их сборочных единиц унифицированы с одноосным тягачом; допускают вертикальные нагрузки, равные массе тягача. Поскольку рабочие скорости машин, агрегатируемых с этими тягачами, не превышают 25 км/ч, а для транспортных работ с прицепами такие тягачи малопригодны вследствие небольшой массы, то наибольшие скорости их не превышают 40 км/ч — предела, после которого машину необходимо подрессоривать.
2. Двухосные и реже трехосные тягачи с седельным устройством с одним ведущим мостом и подрессоренной передней осью (см. рис. 4.7, г).
Обычно, так же как и одноосные тягачи, их можно агрегатировать почти с любыми полуприцепами. Однако в большинстве случаев они менее эффективны, чем одноосные тягачи, вследствие большей массы при том же сцепном весе. Раньше, имея максимальную скорость до 80 км/ч, они были наиболее целесообразны для транспортных работ и эффективны для скреперных работ при дальности возки 3—6 км и более. Это их преимущество в значительной мере ослаблено после демпфирования седельного устройства одноосных тягачей.
3. Двухосные тягачи с шарнирно-сочлененной рамой (см. рис. 4.7, д, е);
применяются только для установки навесного оборудования (погрузчик, бульдозер, толкач), требующего особой маневренности. Тягачи с шарнирносочлененной рамой имеют несколько меньшую устойчивость, однако их высокая маневренность повышает производительность, снижая цикл погрузчика до 22—24 с, что позволяет погрузчикам на их базе конкурировать с экскаватором весом в пять раз больше, чем вес погрузчика.
На рис. 4.9 в качестве одного из примеров агрегатирования показан цементовоз на базе двухосного тягача с полуприцепом. Для разгрузки цемента применяется аэрационный способ. В цистерну с цементом подается от компрессора сжатый воздух. Он поступает под аэролоток, дно которого выполнено из мягкого пористого материала. Воздух, проходя через эту перегородку, разжижает цемент и создает в цистерне некоторое давление, что облегчает выход цемента через разгрузочный патрубок.
ОНВЕЙЕРЫ
Конвейеры применяют для транспортирования гравия, щебня, цемента, грунта, бетонных смесей, кирпича, дробленого камня в пределах строительной площадки, завода строительных деталей и карьера. Машины этого типа можно разделить на следующие группы: а) конвейеры или транспортеры (ленточные, цепные, винтовые, роликовые, вибрационные, а также элеваторы); б) подвесные канатные дороги; в) пневматические транспортные устройства; г) самотечные гравитационные устройства.
Ленточные конвейеры. Они делятся на передвижные (длиной 5÷20 м) и стационарные (до нескольких сотен метров). Они просты по конструкции, имеют сравнительно небольшую металлоемкость, позволяют транспортировать грузы на расстояния до нескольких километров. Производительность их 10 ÷ 20 тыс. т/ч.
Ленточный конвейер (рис. 6.1, а)
представляет собой бесконечную ленту, огибающую два барабана, один из которых является Еедущим, а другой — ведомым. При вращении ведущего барабана -лента под действием сил трения приводится в движение. Между ведущим и ведомым барабанами устанавливают роликовые опоры, поддерживающие верхнюю и нижнюю ветви ленты, не давая ей провисать. Грузы укладывают на ленту.
Способность материала перемещаться вместе с лентой зависит от его гранулометрического состава, определяемого размерами частиц; объемной (насыпной) массы 7- т. е. веса единицы объема материала без его уплотнения при насыпке или укладке с малой скоростью и при малой высоте падения частиц; влажности; подвижности, зависящей от внутренних сил трения, а также от абразивности, липкости, хрупкости и острокромчатости.
Лента конвейера должна быть достаточно прочной, так как она является не только органом, несущим груз, но и тяговым элементом; кроме того, она должна обладать такими свойствами, чтобы сцепляемость (коэффициент трения между лентой и барабаном, а также между лентой и транспортируемым материалом) была наибольшей.
Этим требованиям отвечают ленты, выполненные из нескольких слоев прокладок из хлопчатобумажной ткани, которые связаны между собой слоями резины и покрыты резиной. Такие ленты применяют для транспортирования материалов при температуре от +50 до —15° С. При температуре выше +50 и ниже —15° С используют теплостойкие и морозостойкие ленты.
Более прочными являются ленты с прокладками из нейлона и других искусственных волокон. Особо прочные ленты выполняют с каркасом из стальных тросиков, что позволяет увеличивать длину одною конвейера примерно в 10 раз.
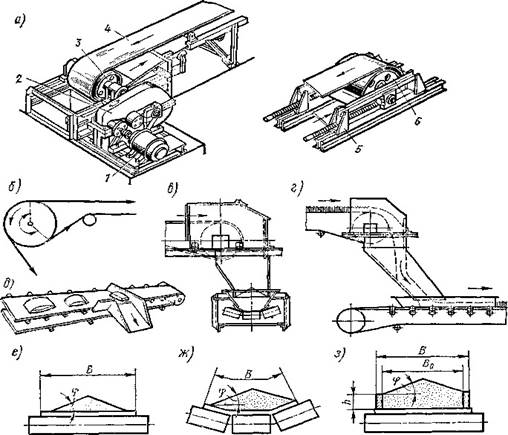
Рис. 6.1. Ленточный конвейер:
а
— общий вид; б — силы, действующие на барабан; в, г, д
— схемы загрузочных и разгрузочных устройств; е, ж, з —
формы конвейерных лент; / — электродвигатель; 2
— редуктор; 3
— ведущий барабан; 4
— лента; 5 — натяжное устройство; 6
— ведомый барабан
Количество прокладок i
в зависимости от ленты В
(м) следующее:
| В
|
0,3
|
0,4
|
0,5
|
0,6
|
0,8
|
1,0
|
1,2
|
1,4
|
| i
|
3-4
|
3-5
|
3—6
|
3—7
|
4-8
|
5-10
|
6—10
|
7-10
|
Надежность работы конвейера зависит от соединения концов ленты. Наиболее прочным является соединение склейкой с последующей вулканизацией. Для этого на концах ленты расщепляют слои и затем отрезают их уступами. После зачистки уступов их покрывают резиновым клеем, соединяют и зажимают между металлическими пластинами. Затем стык нагревают до 100° С, в результате чего происходит вулканизация резины.
Применяют соединения скрепками или шарнирными петлями. Прочность таких соединений на 30—40% меньше, чем при вулканизации.
По известной величине натяжения Smax
выбирают ширину ленты В
(м) с необходимым количеством прокладок i:
i = Smаx
/ ( BP ),
(6.1)
где Р
— допускаемая нагрузка на 1 м ширины одной прокладки ленты [при обычных хлопчатобумажных прокладках Р
= 550 кгс (5,5 кН)].
Привод ведущего барабана осуществляется от электродвигателя через редуктор, установленный на раме.
Многие ленточные конвейеры для большей компактности выполняют с барабанами, в которые встроен электродвигатель.
Загрузка и разгрузка конвейера выполняются загрузочными и разгрузочными устройствами, конструкция которых зависит от вида транспортируемых материалов.
Сыпучие, мелкокусковые и среднекусковые материалы загружаются на конвейер при помощи воронок и направляющих лотков (рис. 6.1, в, г),
а штучные грузы — при помощи направляющих. Для сбрасывания материалов с конвейера служат скребковые сбрасыватели (рис. 6.1, д).
В зависимости от вида груза ленте задается различная скорость. Для транспортирования строительных материалов при прорезиненной ленте скорость должна быть 1,0—2,0 м/с, для транспортирования штучных грузов 0,5—0,8 м/с.
Ленточные конвейеры позволяют перемещать грузы (при прорезиненной ленте) под углом до 20°.
Для работы конвейера необходимо, чтобы сила трения между барабаном и лентой была достаточной для перемещения нагруженной ленты. Величина этой силы трения (рис. 6.1, б)
зависит от коэффициента трения д, между лентой и барабаном и угла обхвата барабана лентой а.
Чтобы лента не проскальзывала, должно быть соблюдено неравенство Эйлера:
ma
(Sнаб / Sсб) £ e (6.2)
где Sнаб
— натяжение в набегающей ветви ленты, кгс (Н); Sсб
— натяжение в сбегающей ветви ленты, кгс (Н); е — основание натурального логарифма.
Для устойчивости ленты в работе ее предварительно натягивают винтами", перемещающими ось ведомого барабана вместе с барабаном.
Величина тягового усилия Р0
,
кгс (Н), необходимая для определения мощности привода (рис. 6.1, б):
Р
0
= Sнаб - Sсб
Натяжение в сбегающей ветви Scб
обычно равно предварительному натяжению S0
,
следовательно,
Р
0
= Sнаб - S0 (6.3)
Величина натяжения должна обеспечивать необходимую силу трения между лентой и приводным барабаном; при этом стрела провеса нагруженной ленты между отдельными опорными роликами не должна превышать заданной величины, которая зависит от расстояния между роликами.
Для получения нужных сил трения и надежной работы величина минимального натяжного усилия
S = 2*5,5(m
+m
) = 11(m
+m
)
min 1 1 ,
(6.4)
где т
— масса 1 м транспортируемого материала, кг; т
1
— масса 1 м ленты, кг.
Производительность ленточного конвейера
П
= 3600F
gu, м3
/ч, (6.5)
где F
— площадь сечения материала, расположенного на ленте, м2
; у
—
.насыпная масса материала, т/м3
; v
— скорость движения ленты, м/с.
Площадь F
зависит от угла естественного откоса ср (который в свою очередь зависит от физических свойств материала), от формы ленты угла наклона ее. Различные формы лент показаны на рис. 6.1. Величина площади сечения F
при углах подъема конвейера до 10° может быть приближенно принята следующей: для плоской ленты (рис. 6.1, е
) F
= 0,05B2
; для плоской ленты с бортами (рис. 6.1 , ж
) F
= 0,05В 2
+ hB
0;
для желобчатой ленты (рис.
6.1, з) F =
0,11В.
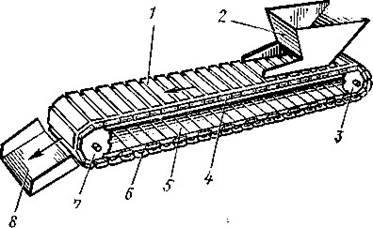
Рис. 6.2. Пластинчатый конвейер:
/ — пластина; 2
— воронка; 3
— натяжная звездочка; 4
— катки; 5 — неподвижные направляющие; 6 —
тяговая цепь; 7 — приводная звездочка; 8
— лоток
При транспортировании кусковых материалов или штучных грузов, максимальный размер которых равен flmax, ширина ленты должна быты для рядового материала В
³ 2атах
+ 0,2 м
; сортированного материала В
³
3,3атах
+ 0,2 м
; штучных грузов В
³ атах
+ 0,1 м
.
Цепные конвейеры.
К цепным относят пластинчатые, скребковые и ковшовые конвейеры.
П л а с т и н ч а т ы е к о н в е й е р ы
(рис. 6.2) применяют для транспортирования горячих, острокромчатых, кусковых и штучных материалов. Тяговым органом пластинчатых конвейеров являются две бесконечные цепи, которые устанавливаются на ведущей и ведомой звездочках. К цепям крепят настилы из гладких или фигурных металлических пластин. Скорость перемещения пластин, а следовательно, и грузов на пластинчатом конвейере меньше, чем у ленточных, и составляет 0,05—0,5 м/с. Пластинчатые конвейеры позволяют перемещать грузы под углом до 30°.
На основании опытных данных установлено, что величина натяжения цепи
S
нaт
= 600B
+ 40L
, кгс,
где В
— ширина настила, м; L
— длина конвейера, м.
Величина тягового усилия ограничивается прочностью цепей. Обычно в конвейерах применяют длиннозвенные цепи, главным образом пластинчатые втулочные и втулочно-роликовые с шагом 100 ¸ 630 мм. Тяговый орган предварительно натягивается, но это натяжение значительно меньше, чем в ленточных конвейерах. Оно делается для того, чтобы цепь не провисала, а также для обеспечения нормального зацепления между цепью и звездочкой.
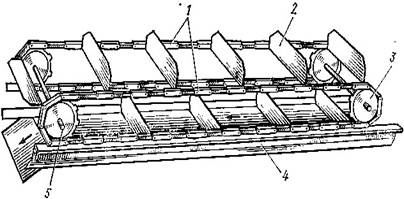
Рис. 6.3. Скребковый конвейер:
/ — цепь; 2
— скребки; 3
— натяжная звездочка; 4
— желоб; 5 — приводная звездочка
Производительность пластинчатых конвейеров подсчитывается так же, как и ленточных, по формуле (6.5).
Винтовые конвейеры.
Эти конвейеры иначе называют шнеками.
Применяют их для транспортирования цемента, гравия, песка, шлака, мокрой глины, бетонной смеси на расстояние 30—40 м под углом до 20°. В отдельных случаях их используют и для вертикального транспортирования. Винтовой конвейер представляет собой винт, заключенный в кожух (желоб). При вращении винта материал перемещается вдоль его оси. Работают такие конвейеры при определенной окружной скорости винтов, которая выбирается в зависимости от коэффициента трения между материалом и винтом., Качество работы конвейера зависит от заполнения желоба: при слишком большом заполнении трение между материалом и винтом будет очень велико и может произойти закупорка желоба, при недостаточном заполнении не достигается возможная производительность.
Производительность винтовых конвейеров зависит от средней площади сечения потока материала в желобе и скорости его перемещения вдоль оси. Эти величины зависят от диаметра желоба, шага и частоты вращения винта, его конструкции и свойств материала.
Величина средней площади сечения потока
F
=
p D
2
/ 4 *
e C
, м2
где С
— коэффициент, учитывающий изменение средней площади сечения потока при работе с уклоном (при горизонтальном расположении конвейера величина С
= 1, при уклоне 20° С = 0,65); e — коэффициент заполнения (8 = 0,8 ¸ 0,85). Скорость перемещения материала вдоль оси
v = S
В
n /
60,
м/с,
где S
B
— шаг винта; п
— частота вращения винта, об/мин. Следовательно, производительность
П
= 3600
eС
*
pD
2
/ 4 * S
В
n
/ 60
g , т/ч
(6.7)
Шаг винта равен диаметру или 0,8 диаметра винта. Диаметры винтов стандартизованы 0,15 ¸ 0,6 м. При выборе конвейеров необходимо, чтобы шаг винта был в 12 раз больше среднего размера кусков сортированного материала и в 4 раза больше максимального размера кусков рядового материала.
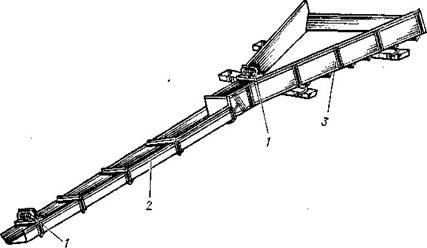
Рис. 6.6. Виброжелоб: 1
— вибраторы; 2
— виброжелоб; 3
— вибропитатель
Мощность этих конвейеров зависит от массы транспортируемого груза
GM
,
скорости движения конвейера или элеватора v,
высоты подъема груза H
, длины транспортирования груза, массы транспортирующего устройства, вида разгрузки. При свободном сбрасывании не тратится мощность на сбрасывание, а при принудительном, например с помощью плужкового сбрасывателя, требуется дополнительная мощность.
Вибрационные конвейеры
. Для транспортирования сыпучих материалов, бетонных смесей, растворов применяют вибрационные устройства. При вибрации значительно уменьшается трение между частицами сыпучих материалов и вязких смесей. Цемент и другие сыпучие материалы при вибрации частично приобретают свойства жидких тел, а растворы и бетонные смеси — более жидкую консистенцию. Достаточно желобу или трубе придать небольшой уклон и сообщить им колебания, чтобы находящийся в них материал начал перемещаться по уклону.
На рис. 6.6 показан виброжелоб для подачи бетонной смеси или раствора, выгружаемых из автомобиля к месту укладки. В зависимости от жесткости смеси угол наклона такого желоба делается 5¸15°. Обычно на таких устройствах устанавливают вибровозбудители с ненаправленными колебаниями. Производительность такой установки может достигать 100 м3
в смену.
а)
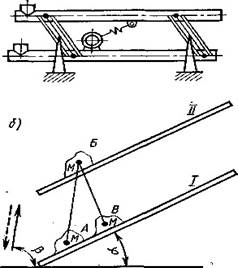
Рис. 6.7. Виброконвейер
Виброконвейеры применяют также для перемещения материалов на заводах строительных деталей, на складах инертных материалов. Материалы могут транспортироваться под углом не только вниз, но и вверх. Общий вид виброконвейера показан на рис. 6.7, а,
принцип работы — на рис. 6.7, б.
Предположим, что наклонный желоб или труба занимают положение /. При вибрировании желоб при каждом колебании переходит из положения / в положение //, и частица, находящаяся на желобе в положении А,
переместится в положение Б.
При резком возвращении желоба в положение / частица переместится дополнительно относительно желоба и при окончании одного колебания будет находиться в точке В,
расположенной выше точки А.
Во время движения желоба вверх находящаяся на нем масса М
переместится вместе с желобом под действием сил трения. Если движение желоба вверх будет слишком резким, то силы инерции плюс сила тяжести, действующие на массу, окажутся больше сил трения, и масса начнет скользить по желобу вверх. Если же движение желоба вниз будет недостаточно резким, то масса останется на желобе.
Направление движения материала по желобу определяется углом наклона желоба, характером и направлением колебаний вибровозбудителя, а также сообщением желобу несимметричных колебаний, во время которых движение желоба вверх будет происходить плавно, а вниз резко. Недостатком вибрационных конвейеров является сравнительно малый моторесурс вибровозбудителей, сложность наладки, неизбежность резонансного режима при остановках.
СПУСКНЫЕ САМОТЕЧНЫЕ УСТРОЙСТВА
Большое применение в строительстве имеют самотечные устройства, по которым материалы перемещаются под действием силы тяжести. Такие устройства используют для спуска мусора из строящихся или ремонтируемых зданий, укладки материалов, подачи их в бункера или на конвейеры.
Обычно материалы в рассматриваемых устройствах перемещаются по наклонной плоскости. Угол наклона подбирают так, чтобы материал двигался со скоростью, обеспечивающей безопасные условия работы. Чаще всего спускные устройства выполняют в виде лотков или труб
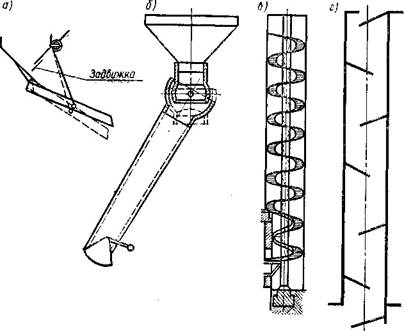
Рис. 6.8. Самотечные устройства
На рис. 6.8 а
показан спускной корытообразный лоток. Он подвешивается на шарнире и поддерживается двумя тягами. В зависимости от транспортируемого материала лотку задается определенный угол наклона изменением длины тяг. Ширина лотка обычно составляет не менее трехкратного максимального размера кусков материала или штучных грузов. Высота бортов принимается равной 0,4 ширины лотка. Лотки делают из металла толщиной 3 ¸ 8 мм.
Для перемещения сыпучих и пылящих материалов применяют спускные трубы (рис. 6.8, б).
Такие спуски состоят из загрузочного бункера, трубы и в некоторых случаях затвора. От одного бункера могут отходить две и более трубы. Диаметр груб составляет не менее 300 мм.
Для спускания штучных грузов применяют винтовые спуски, представляющие собой трубу, внутри которой помещается неподвижная спираль (рис. 6.8, в).
Шаг и угол наклона спирали подбирают так, чтобы грузы перемещались под действием собственного веса с заданной скоростью.
Если для спуска сыпучих материалов требуется ограниченная скорость падения, можно использовать каскадные спуски (рис. 6.8, г).
Они состоят из вертикальной шахты, внутри которой размещены по винтовой линии наклонные лотки.
Производительность спускных устройств зависит от коэффициента заполнения e, величина которого колеблется в пределах 0,4 —
0,8, и от скорости движения материала по желобу u,
которая в свою очередь зависит от угла наклона и сил трения материала о желоб. Производительность спускного устройства
П
= 3600F
gue, т/ч, (6.8)
где F
— площадь сечения самотечного устройства, м2
; у
— насыпная масса материала, т/м3
.
ОБОРУДОВАНИЕ ДЛЯ ПНЕВМАТИЧЕСКОГО ТРАНСПОРТИРОВАНИЯ
а)
Рис. 6.9. Схемы пневматического транспортирования
При помощи пневматических устройств перемещают сыпучие материалы (цемент, песок, шлак, древесные опилки и т, д.), а также растворы. Принцип работы пневматических устройств заключается в том, что в трубопровод, по которому транспортируется материал, подается такое количество воздуха и с такой скоростью, при которых частицы материала удерживаются во взвешенном состоянии и в этом состоянии перемещаются по трубопроводу. Чтобы частицам сообщить взвешенное состояние, необходим определенный расход воздуха.
Применяются две системы транспортирования. В одной системе (рис. 6.9, о), называемой вакуумной, транспортируемый материал засасывается вместе с потоком воздуха соплами 1
, прикрепленными к трубопроводу. Насос 6
всасывает воздух, который увлекает за собой частицы материала. Между насосом и соплом установлен разгружатель 2,
диаметр которого значительно больше диаметра трубопровода. Смесь воздуха с материалом, попадая в разгружатель, резко уменьшает скорость, и частицы материала падают на дно. Внизу разгружателя имеется герметический затвор 3,
при открывании которого материал высыпается в бункер 4.
Емкость бункеров выбирают в зависимости от производительности устройства и условий его работы. На рис. 6.10 показаны различные формы бункеров.
На выгрузку материала значительно влияет угол наклона стенок бункера а.
Этот угол для строительных материалов должен быть больше, чем угол естественного откоса этих материалов. Обычно он составляет 45—60°. Увеличивать угол а нецелесообразно, так как при этом уменьшается емкость бункера (при той же высоте).
Пропускная способность бункера
П
= 3600F
g, м3
/ч,
(6.9)
где F
— площадь выходного отверстия, м2
; v
— скорость движения
(истечения) материала, м/с.
Рис. 6.10. Формы бункеров: а
— пирамидальная; б
— призмопирамидальная; в
— коническая; г
— цилиндрическая
Скорость v
зависит от гранулометрического состава материала, площади сечения выходного отверстия и его формы, которая определяется периметром А
(м). Отношение F/A
называется гидравлическим радиусом отверстия истечения R.
На пути от разгружателя к насосу устанавливается фильтр 5
(см. рис. 6.9), в котором оседают оставшиеся частицы материала. Благодаря этому насос предохраняется от засорения, уменьшаются потери материала и не происходит выброса материала в атмосферу, что улучшает условия безопасности труда. Этот способ применяют для транспортирования на сравнительно короткие расстояния.
В другой системе (см. рис. 6.9, б),
называемой нагнетательной, материал подается из бункера 4
в трубопровод 7. В этот же трубопровод нагнетается воздух насосом 6.
Воздух вместе с материалом поступает в разгружатель 2,
диаметр которого также больше диаметра трубопровода, и частицы материала оседают в разгружателе. За разгружателем устанавливается фильтр 5
для предотвращения выброса материала в атмосферу.
Пневматическим способом можно транспортировать материалы на расстояния до 2 км с большой производительностью, и материал не распыливается. Недостатком является большой удельный расход энергии (до З¸5 кВт*ч/т*км).
В среднем на каждый килограмм материала расходуется 10¸15 м3
воздуха. Перепад давлений в вакуумных системах составляет 0,1 ¸ 00,4 ат (0,01 ¸ 0,04 МПа), в нагнетательных давление в среднем достигает 2 ¸ 6 ат (0,2 ¸ 0,6 МПа).
БУНКЕРА, ЗАТВОРЫ И ПИТАТЕЛИ
Транспортирующие устройства комплектуют в зависимости от вида работ вспомогательным оборудованием: бункерами, затворами и питателями.
Бункера
предназначены для кратковременного хранения сыпучих и кусковых материалов. Их размещают в начале или в конце транспортирующего устройства.
Для порошкообразных и зернистых материалов площадь F
должна быть не меньше 0,09 м3
.
Затворы
по конструкции различны в зависимости от вида материала, размера бункера и условий разгрузки. Для бункеров малой емкости при полной их разгрузке применяют клапанные откидные затворы ; для разгрузки зернистых и мелкокусковых материалов — секторные ;
для крупнокусковых материалов— пальцевые .
Используют также горизонтальные малогабаритные реечные затворы .
Так как на затворы действуют большие нагрузки, возникающие от давления материала, то для их закрытия при порционном опорожнении бункера требуются значительные усилия. Величина давления на затворы зависит от высоты столба материала в бункере, размеров выходного отверстия F,
состава и свойств материала, а также от формы затвора. Например, в затворах наклонно-откидных (рис. 6.11, а)
на затвор действует давление T'
, равное только части общего веса Т
материала, находящегося в затворе.
В затворах секторных на затвор действует вес материала, находящегося в бункере. Для жидких бетонных смесей и растворов давление
Tж
= Fyh,
где у
— объемная масса материала, т/
м3
; h
— высота столба материала, м.
Для сыпучих материалов давление
T
c
= Fp,
где р
— среднее вертикальное давление.
Величина р зависит от коэффициента внутреннего трения f
, коэффициента подвижности т
,
гидравлического радиуса выходного отверстия R
,
а также от величин у
и g
:
p = yR / fmg
Для основных строительных материалов произведение fm
» 0,175. Зная R
и у
,
можно определить величину р
,
а следовательно, и Т
.
Питатели
предназначены для непрерывной выдачи материалов из бункеров. Ленточные и пластинчатые питатели (рис. 6.12, а
и б) обычно имеют кривошипно-храповой привод, обеспечивающий небольшую скорость перемещения (0,05 ¸ 0,5 м/с.) Ленточные питатели пригодны для выдачи материалов как пылевидных, так и средне-кусковых; их производительность достигает 300 м3
/ч. Производительность пластинчатых питателей 1000 м3
/ч. Применяют их для подачи средне- и крупнокусковых материалов.
Винтовые питатели используют при работе с сыпучими материалами. Производительность их до 30 м3
/ч. Тарельчатые питатели применяют для материалов различной крупности при производительности до 25 м3
/ч. Барабанные лопастные питатели могут выдавать материал порциями, для чего они поворачиваются на определенный угол. Кареточные и вибрационные питатели тоже выдают материал порциями. Последние три питателя служат не только для выдачи материалов, но и для их дозирования.
КЛАССИФИКАЦИЯ СТРОИТЕЛЬНЫХ КРАНОВ, ИХ РАБОЧИЕ ОРГАНЫ И ХАРАКТЕРИСТИКИ
Краны предназначены для подъема грузов и подачи их к месту разгрузки, а при монтаже — для подачи деталей к месту установки их в проектное положение в вертикальном и горизонтальном направлениях.
Типаж кранов, применяемых в народном хозяйстве, многообразен. Для целей строительства используют следующие виды кранов
: 1) легкие переносные краны — подъемники, используемые в основном для подъема груза по вертикали и в отдельных случаях на небольшое расстояние по горизонтали; 2) стационарные краны для подъема и перемещения грузов по вертикали и по горизонтали в пределах радиуса окружности, описываемой стрелой; 3) башенные краны (передвижные стационарные и приставные и самоподъемные) служат для подъема грузов и перемещения их по горизонтали; 4) самоходные стреловые краны применяют для монтажных и погрузочно-разгрузочных работ; обладают высокой мобильностью и практически не ограниченной зоной обслуживания; 5) козловыми кранами осуществляют подъем, перемещение и монтаж конструкций. Пределы зоны ограничены пролетом крана и длиной его перемещения; 6) кабельные краны применяют на таких строительных объектах, где приходится перемещать грузы на значительное расстояние.
Кроме того, используют специальные краны — плавучие, летающие (вертолеты), трубоукладчики.
Все краны обозначают индексами, состоящими из буквенной и цифровой части. Буквенная часть обозначает группу кранов или особенности его конструкции, например: КБ — кран башенный; АК — автомобильный кран; МКГ, МКП или МКА — монтажный кран гусеничный, пневмоколесный или автомобильный; СКГ — специальный кран гусеничный; СМК — специальный монтажный кран. В цифровых обозначениях указывается грузоподъемность, например: МКГ-20 — кран монтажный гусеничный, грузоподъемность 20 т.
Краны состоят из рабочих органов остова, ходовой рамы, поворотной части, башни, стрелы, механизма подъема и опускания груза, механизма подъема и поворота стрелы, механизма перемещения крана, рабочих органов, аппаратуры управления и контроля грузоподъемности и высоты подъема.
В зависимости от типа и значения кран может иметь все перечисленные составные части или только некоторые из них. Основными параметрами кранов являются: грузоподъемность G,
т; грузовой момент M
г,
тс*м (кН*м), равный произведению массы поднимаемого груза G
на плечо L
от центра тяжести поднимаемого груза до оси крана; вылет стрелы L
c, м; высота подъема груза H
, м; скорость подъема и опускания груза u
п и u
0,
м/с; скорость передвижения крана u
к, м/мин; для стреловых кранов кроме этих параметров также вылет стрелы, а следовательно, радиус действия R,
м, для кабельных и козловых кранов длина пролета L
п
,
м.
Диапазон изменения скоростей uп
,
u0
и uк
также является параметром, характеризующим краны. Величины М
г
и G
задаются минимальными и максимальными в зависимости от величины вылета стрелы.
Рабочие органы кранов
представляют собой грузозахватные устройства для единичных штучных грузов или группы грузов (крюки, траверсы, захваты и т. д.), либо емкости, в которых размещают грузы (ковши, бадьи, грейферы).
Следует различать два вида рабочих органов
: 1) представляющие собой грузозахватные устройства и, как правило, являющиеся постоянной составной частью машин. Крюк является основным рабочим органом крана. Груз подвешивается к крюку непосредственно или при помощи стропов. Крюки стандартизованы. Они бывают однорогие и двурогие. Размеры крюков подбирают соответственно максимальной грузоподъемности крана; 2) дополнительно подвешивающиеся к грузозахватным устройствам машины (оснастка). Грузы и емкости с грузами подвешивают к крюкам или скобам при помощи цепных или канатных стропов или траверс.
К а н а т н ы е с т р о п ы
представляют собой отрезки стального каната, которые вверху присоединены к кольцу, надеваемому на крюк крана. Внизу каждый отрезок каната имеет крюк или коуш для прикрепления к поднимаемому грузу. Таких отрезков ветвей может быть два, три и больше в зависимости от массы и конфигурации груза (рис. 5.12, а, б).
Стропы могут также выполняться из пеньковых и капроновых канатов в виде петли или нескольких петель (рис. 5.12, г).
При симметричной подвеске груза усилие в каждой ветви стропы (рис. 5.12, е)
S
= G
/ m
cos
a = K
* G
/ m
(5.13)
где К
— коэффициент, характеризующий угол наклона стропа к вертикали (К
= 1/cosa); G
— масса груза, т; m
— количество ветвей; a — угол между ветвью стропы и вертикалью. Если a = 0, 30, 45, 60°, то соответственно К
= 1; 1,15; 1,42; 2,0. Если позволяет высота подъема, желательно, чтобы угол был минимальным.
Ц е п н ы е с т р о п ы
(рис. 5.12, д)
выполняют из стальных некалиброванных цепей. Натяжение в цепных стропах подсчитывается по формуле (5.13).
Рис. 5.12. Виды строп:
а —
конструкции канатных строп; б
— примеры захвата деталей стропами; в
— силы, дей-
ствующие на стропы; г
— способы крепления пеньковых строп; д
— цепные стропы
Т р а в е р с ы
различных конструкций показаны на рис. 5.13. Напряжения, возникающие в траверсе, зависят от способа подвески ее к крюку. Если траверса подвешена на канатах, направленных вертикально (рис. 5.13, а),
то ее рассчитывают на изгиб. Напряжение от изгиба в траверсе s = M/W; M = Ga/
4,
(5.14)
где М
— максимальный изгибающий момент, кгс*м (Н*м); G
— масса поднимаемого груза, т; а
— расстояние между стропами, м; W
— момент сопротивления балки траверсы.
Если траверса подвешена на канатах, направленных под углом к вертикали (рис. 5.13, б),
то возникают усилия, действующие вдоль нее, что вызывает дополнительно продольный изгиб траверсы. Напряжения от продольного изгиба, возникающие в траверсе, s = T
/ F
j,
(5.15)
где Т
— усилие, действующее вдоль траверсы, кгс (Н); F
— площадь сечения траверсы, м2
; j — коэффициент устойчивости при изгибе.
Рис. 5.13. Траверсы
Траверсы выполняют различными для подъема грузов разной массы и конфигурации. На рис. 5.13, в
показана траверса для подъема стропильных балок пролетом до 18 м, массой до 10 т. Такая траверса представляет собой металлическую ферму и весит около 1 т.
Для подъема грузов сложной конфигурации и массой более 20 т применяют трехрогие траверсы (рис. 5.13, г).
Такая траверса предназначена для подъема царг диаметром 9—11 м при монтаже доменных печей.
З а х в а т ы
также используют для поднятия грузов. Например, колонны поднимают захватами, показанными на рис. 5.15, а. Для подъема массовых однотипных грузов применяют захваты в виде клещей (рис. 5.15, б).
При подъеме груз удерживается в клещах силой трения, поэтому необходимо, чтобы усилие
Р
³ G /
2
m
(5.16)
где G
— масса поднимаемого груза, т; m — коэффициент трения. Усилие можно определить из уравнения равновесия системы
Ta + Pb-P
m * c / 2 =
0,
(5.17)
где с
/2 — расстояние от линии действия силы P
m до оси захвата,
Так как Т=G /
2 cos a,
то можно написать, что
- Ga
/ 2 cosa + Gb
/ 2
m - Gc
/ 4 = 0
(5.18)
Исходя из этих зависимостей, подбирают плечи рычагов клещей.
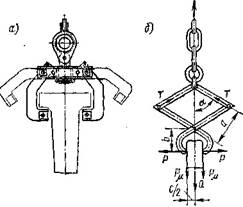
Рис. 5.14. Захваты
Б а д ь и
используют для перемещения сыпучих, кусковых и пластичных материалов(песка, щебня, бетонных смесей и др.). По конструкции бадьи бывают опрокидными и с раскрывающимся днищем (рис. 5.15).
Г р е й ф е р ы
(двухканатные, крюковые одноканатные и моторные). Для массового перемещения сыпучих материалов более пригодны грейферы, которые загружаются и разгружаются автоматически.
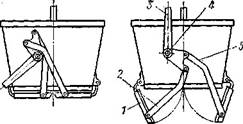
Рис. 5.15. Бадья с раскрывающимся днищем:
/ — створки днища; 2, 5
— запорные рычаги; 3
—
рычаг для открывания и закрывания створок;
4
— ось
Двухканатный грейфер (рис. 5.16) подвешивается к двухбарабанной или к двум однобарабанным лебедкам 1
на поддерживающем 2
и замыкающем 3
канатах. Поддерживающий канат 2
закреплен на верхней головке грейфера. Замыкающий канат 3
прикреплен к нижней головке грейфера 4,
на которой одновременно закреплены тяги 5,
связанные с челюстями грейфера. Для создания большего усилия замыкания грейфера в верхней и нижней головке имеются блоки полиспаста, через которые проходит замыкающий канат. Когда грейфер висит на поддерживающем канате, а замыкающий канат освобожден, челюсти грейфера под действием их веса, веса нижней головки и грунта раскрываются (положение 1
) и материал высыпается.
При одновременном опускании обоих канатов грейфер, независимо от положения челюстей, опускается и ложится на материал (положение //). При выбирании замыкающего каната нижняя головка поднимается, челюсти грейфера смыкаются, захватывая материал (положение ///). Выбирание замыкающего каната после полного замыкания челюстей приводит к подъему грейфера. При этом включается на подъем (во избежание провисания) также и поддерживающий канат, который при достаточной опытности крановщика может принять на себя часть общей нагрузки.
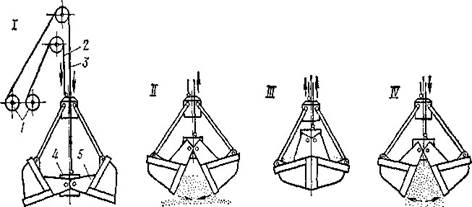
Рис. 5.16. Схема работы двухканатного симметричного грейфера
Для опорожнения грейфера барабан поддерживающего каната затормаживается, а барабан замыкающего каната вращают в сторону опускания этого каната. Под действием веса материала и челюстей грейфера они раскрываются (положение IV).
Направление движения канатов для каждого из положений показано стрелками.
Крановые механизмы могут приводиться в движение каждый отдельным двигателем (многомоторный или индивидуальный привод) или один привод сообщает движение всем механизмам или группе механизмов
(одномоторный или групповой привод).
На рис. 5.17 приводятся схемы основных механизмов кранов с многомоторным приводом. Все они построены на одном принципе: электродвигатель через зубчатую передачу (редуктор) сообщает вращение исполнительным элементам.
М е х а н и з м п о д ъ е м а
(рис. 5.17, а).
Электродвигатель 1
через несколько зубчатых передач 3
приводит во вращательное движение барабан 4,
на который наматывается канат 5, идущий от неподвижной обоймы 6
полиспаста. Груз подвешен на крюке 7. На валу, соединенном с валом электродвигателя, установлен тормоз 2,
применяемый для удержания поднятого груза.
М е х а н и з м п е р е д в и ж е н и я р е л ь с о - колес ного к р а н а
(рис. 5.17, б).
Электродвигатель 1
через несколько зубчатых передач 3
приводит во вращение колесо 4.
Так же, как и в механизме подъема, установлен тормоз 2,
предназначенный для удержания крана на месте при нахождении его на уклоне и при действии на него ветрового давления.
М е х а н и з м в р а щ е н и я пов ор отной ч ас ти кр ана
(рис.
5.17, г).
Электродвигатель 1
, установленный на поворотной части крана, через несколько зубчатых передач 3
и конической передачи 8
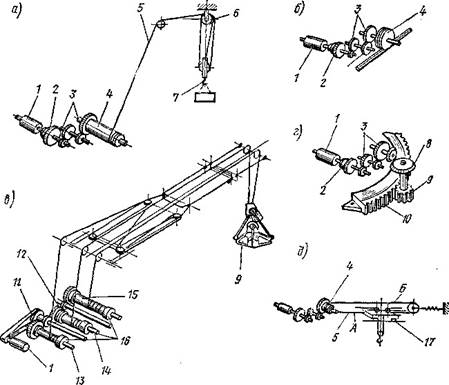
Рис. 5.17. Схемы крановых механизмов
приводит во вращательное движение шестерню 9,
которая обкатывается по неподвижному зубчатому ободу 10,
укрепленному на неповоротной части крана. Таким образом, вся поворотная часть крана обкатывается вокруг обода. На валу электродвигателя 1
помещен тормоз 2.
Г р у п п о в о й п р и в о д
(рис. 5.17, в). Двигатель / через ременную или цепную передачу // приводит во вращательное движение шестерню 12.
Последняя приводит во вращение вал со стрелоподъем-ньш барабаном 13
и грейферными барабанами 14
и 15.
На всех валах с барабанами установлены муфты 16,
которыми барабаны могут независимо включаться.
М е х а н и з м и з м е н е н и я в ы л е т а к р ю к а
в одних кранах изменяет наклон стрелы, а в других передвигает каретку с несущими блоками. На рис. 5.17, д
показана схема механизма передвижения каретки с крюком. К каретке 17,
установленной на рельсах, прикреплены концы тягового каната 5, огибающего барабан 4
лебедки. При вращении барабана по часовой стрелке канат наматывается с нижней ветви А
барабана и сматывается с верхней ветви Б.
Каретка движется вправо, при вращении против часовой стрелки — влево.
В каждом из этих механизмов имеется тормозной шкив (тормоз), который устанавливают обычно на валу, находящемся на одной оси с валом электродвигателя.
В зависимости от типа и назначения кранов они могут иметь различные механизмы. Например, неподвижные краны имеют механизмы подъема и опускания груза, поворота мачты, поворота стрелы, наклона стрелы. В таких кранах нет механизма передвижения крана, который имеется в передвижных кранах.
ДОМКРАТЫ, ЛЕБЕДКИ, ТАЛИ
Эти устройства могут иметь ручной, электрический, гидравлический или пневматический привод.
Устройства с ручным приводом основаны на том, что человек, прикладывая сравнительно малое усилие — в среднем 16 кгс (160 Н), может поднимать значительный груз.
Домкраты
обычно используют для подъема груза на небольшую высоту, причем воздействуют на груз снизу; их делят на реечные (грузоподъемность до 6 т, высота подъема до 0,3 м), винтовые (грузоподъемность до 50 т, высота подъема до 0,35 м) и гидравлические (грузоподъемность 50¸500 т, высота подъема 0,15—0,2 м).
Домкраты с ручным приводом показаны на рис. 5.1. Грузоподъемность устройств с ручным приводом определяется передаточным отношением от механизма привода к исполнительному органу (штоку домкрата и т. д.) и КПД механизма. Величину веса груза при заданном усилии на рукояти домкрата можно найти, приравняв работу, совершаемую рабочим за один оборот рукояти домкрата или за один ход поршня, к работе, которая затрачивается на подъем груза. Тогда:
1) для винтового домкрата (рис. 5.1, а)
P*
2
pR = Qs 1/
h,
(5.1)
где Р
— усилие, прилагаемое рабочим, кгс (Н); R
— длина (радиус) рукояти, мм; Q —
грузоподъемность домкрата или величина преодолеваемого сопротивления, кгс (Н); s — величина перемещения груза
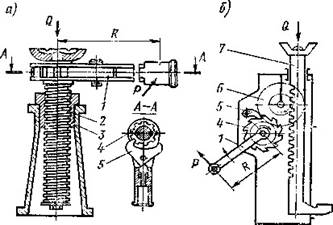
на oдин оборот рукоятки (соответствует шагу винта домкрата), мм; h —
КПД устройства. Из формулы (5.1)
Q = P
2
pR
h / s
(5.2)
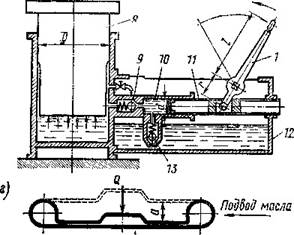
Рис. 5.1. Домкраты:
а
— бинтовой; б — реечный; о
— гидравлический; г —
беспоршневой; 1
— рукоять; 2
— винт; 3
— гайка; 4 —
храповое колесо; 5
— защелка; 6
— зубчатое колесо; 7
— шток с рейкой и лапой; 8
— основной поршень; 9
— клапан; 10
— цилиндр ручного насоса; 11
— шток ручного насоса; 12
— маслобак; 13 —
всасывающий клапан
2) для реечного домкрата (рис. 5.1, б) величина Q
определяется той же зависимостью, что и для винтового домкрата, но величина перемещения s груза за один оборот рукояти зависит от передаточного числа i
между шестерней, закрепленной на оси рукояти домкрата, и зубчатым колесом, приводящим в движение рейку домкрата и диаметра делительной окружности этого зубчатого колеса:
s =
pd/i
,
где d
= тz (т
— модуль зуба, 2 — число зубьев). Следовательно, Q = P
2Ri
h /d *
103
* т
(5.3)
3) в гидравлическом домкрате (рис. 5.1, е) жидкость (обычно масло) подается ручным насосом с диаметром штока d
в основной цилиндр с диаметром поршня D.
Грузоподъемность домкрата
Q = qF
ц
; Q = q *
pD2
/ 4
(5.4)
где q —
давление масла в цилиндре, равное давлению масла, создаваемому ручным насосом, кгс/см2
(МПа); F
ц —
площадь сечения основного цилиндра.
Усилие Р,
прилагаемое рабочим, диаметр d
и давление q
связаны зависимостью
Р
= qF
нr
/ l
; P
= q
pd
2
/ 4 * r / l
(5.5)
Разделив уравнение (5.4) на уравнение (5.5), получим:
Q = P * D2
/ d2
* l / r
(5.6)
4) в беспоршневых домкратах в замкнутый объем, который может деформироваться (рис. 5.1, г), накачивается масло под высоким давлением. Под действием этого давления стенки домкрата перемещаются; величина перемещения а
(ход домкрата) достигает 20 мм. Их грузоподъемность достигает 200 т. В этих домкратах
Q = Fq,
(5.7)
где F
— площадь поперечного сечения домкрата, м2
.
Лебедки
делятся на однобарабанные и многобарабанные, по виду установки — на настенные, подвесные и наземные. Главным параметром лебедок является тяговое усилие S. Кроме того, лебедки характеризуются канатоемкостью барабана L
и скоростью каната v.
В зависимости от назначения лебедки эти параметры различны. Лебедки делят на подъемные — общего назначения и монтажные; тяговые — для перемещения грузов по горизонтали; скреперные (обычно двухбарабанные) — для транспортирования ковшей-волокуш с заполнителями.
Лебедки общего назначения имеют тяговое усилие 0,5—7,5 тс (5—75 кН), скорость каната до 30 м/мин, канатоемкость 80—100 м. Тяговое усилие монтажных лебедок 1—2,5 тс (10—25 кН), скорость каната 10—15 м/мин, канатоемкость 30—40 м.
Схема барабанной лебедки с ручным приводом дана на рис. 5.2, а.
Тяговое усилие
S =
2P * R / D * i
h кгc(H),
(5.8)
где Р
— усилие, прилагаемое к рукояти одним или несколькими рабочими, кгс (Н); R
— длина рукояти, мм; D
— диаметр барабана лебедки, мм; i
— передаточное число от вала, на который насажена рукоять, к валу барабана; h— КПД лебедки.
Схемы барабанных лебедок с электрическим приводом даны на рис. 5.2, б, в.
На рис. 5.2, б дана схема электрореверсивной лебедки. Она приводится в движение реверсивным электродвигателем, вал которого жестко связан с барабаном с помощью редуктора. Опускание груза производится при обратном ходе двигателя на режиме его работы. Между двигателем и редуктором устанавливается тормоз для удержания груза. Обычно применяют тормоза двухколодочные электромагнитные, которые автоматически включаются при отключении электродвигателя.
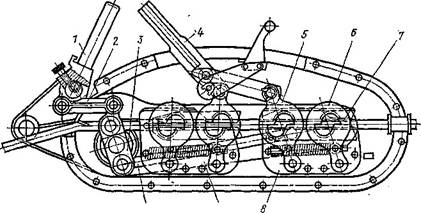
Рис. 5.3. Ручная рычажная лебедка
Фрикционные лебедки дают возможность осуществлять более плавное трогание груза с места, поэтому их применяют в кранах, в частности вантовых, жестконогих и кабельных.
Во всех механических лебедках скорость подъема груза или скорость его подтягивания постоянна, если в редукторе нет коробки передач.
Мощность для подъема груза со G
(кгс) скоростью v
равна:
N = Gv/102
h,
кВт.
(5.9)
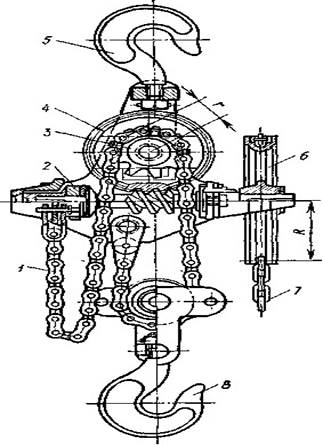
Рис. 5.4. Ручная таль:
/ — цепь подъема груза; 2
— тормозное устройство; 3
— звездочка; 4 —
червячное колесо; 5 — крюк для подвешивания тали; в
— приводное колесо; 7 —
цепь привода тали) 8
— крюк для подвешивания груза
Канатоемкость барабана L,
т. е. длина каната, который может быть уложен на барабане, зависит от длины рабочей части барабана l
(мм), диаметра барабана D
(мм), числа слоев каната на барабане т
и диаметра каната d
(мм):
L = lm
p (D
+ md
) / 1000d
, м (5.10)
Рычажные ручные лебедки (рис. 5.3) широко применяются при монтажных работах. Они предназначены для подтягивания и подъема грузов.
Основное преимущество этой лебедки — очень малый вес. Лебедка с тяговым усилием в 3 тс весит 55 кг (из них 25 кг весит трос).
Работа лебедки основана на протягивании каната через тяговый механизм. Поворотом рукояти / переднего хода перемещается тяга 2
и поворачивается поводок 3.
Поводок связан тягой 10
с корпусами переднего 9
и заднего 8
захватов. В корпусах захватов установлены серьги 5
и 6,
в которых размещены сухари 7,
охватывающие канат. При повороте рукояти / по часовой стрелке сухари захвата 9
освобождают канат и перемещаются вместе с серьгами по канату вправо. В это время сухари захвата 8
держат зажатым канат. При повороте рукояти / против часовой стрелки сухари захвата 9
зажимают канат и протаскивают его влево, в это время сухари захвата 8
освобождают канат. Рукоять 4
служит для осуществления заднего хода.
Тали
применяют только для подъема и опускания или подтягивания небольших грузов, стягивания между собой отдельных элементов при монтажных работах, натягивании канатов и проводов при усилиях 0,1—5 тс (1—5 кН). Тали делят на ручные и электрические, шарнирных или сварных калиброванных цепей.
На рис. 5.4 приведена ручная таль. Выигрыш в силе достигается применением полиспаста. Для уменьшения габаритов вместо канатных полиспастов применяют системы из звездочек и пластинчатых,
Так как звездочка тали приводится в движение обычно червячным редуктором, то величина грузоподъемности тали
Q =PimR * l / r*
103
*
h,
(5.11)
где Р
— усилие, прикладываемое рабочим к цепи привода тали, кгс (Н); i
— передаточное число червячного редуктора; т
— кратность полиспастной подвески, обычно равная 2; R
— радиус приводного колеса, мм; r
— радиус ведущей звездочки, мм; h — КПД тали.
Эти тали имеют грузоподъемность 1—10 т, применяются при монтаже конструкций, а также при ремонте и монтаже оборудования.
В рассмотренных механизмах, за исключением винтовых домкратов, применяют устройства, препятствующие обратному движению груза. В реечном домкрате и в некоторых конструкциях лебедок, а также в талях таким устройством является храповик, в гидравлическом домкрате — обратный клапан.
СТРОИТЕЛЬНЫЕ ПОДЪЕМНИКИ
Для подъема строительных материалов и деталей на перекрытия или леса зданий, для подачи сыпучих материалов в смесительные
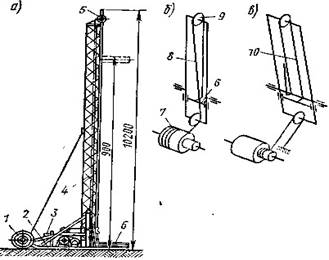
Рис. 5.5. Свободностоящий мачтовый подъемник:
а
— общий вид; б — схема запасовки канатов при работе; в
— то же, при монтаже; / — колеса на пневматических шинах; 2
— опорная рама; 3
— щит электрооборудования; 4
— мачта; 5
— блок грузо-рого каната; 6
— грузовая платформа; 7
— лебедка; 8
— грузовой канат; 9
— верхний блок мачты; 10
— зажим
машины и грохоты, а также для монтажных работ широко применяют подъемники.
Строительные подъемники разделяются на следующие группы: по способу их установки — на свободностоящие и приставные; по назначению — на грузовые и грузопассажирские; по конструкции направляющих — на мачтовые (стоечные), шахтные, струнные; по типу привода — на реечные и канатные.
Свободностоящий мачтовый подъемник
показан на рис. 5.5. Грузоподъемность подъемника 300 кг, высота подъема до Юм. Монтаж и демонтаж такого подъемника занимает не более 5—10 мин. На подъемнике установлен конечный выключатель, ограничивающий высоту подъема, а также автоматический аварийный ловитель клинового типа для остановки платформы при обрыве каната.
Грузопассажирские подъемники
(рис. 5.6) поднимают не только строительные материалы, сантехническое оборудование и другие грузы, но и рабочих. Применение таких подъемников значительно сокращает потери рабочего времени на подъем и спуск рабочих с этажей.
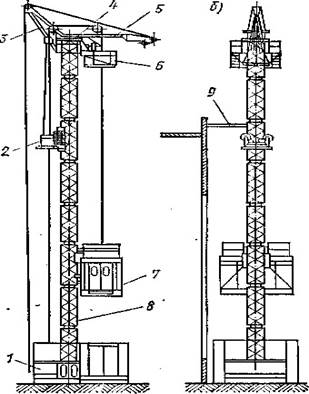

Рис. 5.6. Грузопассажирский мачтовый подъемник:
а
— общий вид; б
— схема крепления к зданию; в
— схема запасовки каната ограничителя скорости; / — опорный блок; 2
— противовес; 3
— стойка; 4 —
головка; 5
— стрела; 6
— подвесная площадка; 7
— кабина; 8
— мачта; 9
— кронштейн крепления мачты;
Кинематическая схема этого подъемника не отличается от а)
схемы двухстоечного подъемника; мачта его более мощная, представляет собой сварную пространственную форму из швеллеров и труб и состоит из отдельных секций по 3 м каждая. Вместо площадки такие подъемники имеют кабину, в которой помещаются подъемная лебедка и механизмы управления. Грузоподъемность их до 800 кг груза или до 10 чел, скорость подъема 35 м/мин. Подъем кабины осуществляется при помощи лебедки, оборудованной двумя колодочными электромагнитными тормозами, показан на рис.5.6, б.
На рис. 5.6, в
приведена схема запасовки канатов ограничителя скорости. Если скорость каната увеличивается более чем на 15% от номинала, центробежный регулятор включает систему ловителей, которые останавливают кабину.
Для перемещения поднимаемых грузов на этажи строящихся зданий применяют различные способы и устройства. На рис. 5.7, а
показано перемещение груза на шарнирно-сочлененной стреле с гуськом; на рис. 5.7, б — при помощи выдвижной площадки грузового подъемника; на рис. 5.7,6 — при помощи выдвижной площадки грузопассажирского подъемника; на рис.
5.7, г
— при помощи вы движного монорельса.
Ковшовые (скиповые)
подъемники (рис. 5.8) применяют для подачи сыпучих материалов и растворов в бункера, смесительные машины и грохоты. Объем ковша обычно составляет 1 м3
, скорость подъема 60 м/мин. Подъемник устанавливают в углубление, в которое опускается ковш /, что значительно облегчает разгрузку автомобиля и наполнение ковша. Ковш поднимается при помощи каната 2

Рис. 5.7. Схемы устройств для выдвижения грузонесущих органов внутрь здания:
1
— откидная решетка; 2
— выдвижная площадка; 3
— барабан привода выдвижения; 4 —
монорельс
по направляющим3.
Для выгрузки ковша направляющие 3
на определенной высоте имеют изогнутую форму, благодаря чему ковш опрокидывается по достижении этой высоты.

Рис. 5.8. Ковшовый скиповый подъемник
Рис. 5.9. Шахтный подъемник с опрокидывающимся ковшом:
1
— шахта; 2 —
клеть; 3
— опрокидывающийся ковш; 4
— разгрузочный лоток; 5
— приемный лоток
Шахтные подъемники
применяют для подъема сыпучих материалов, раствора, бетонной смеси на высоту 100 м и выше. Масса поднимаемого груза достигает 3 т, скорость подъема 30 м/мин. Ковш с грузом помещается на площадке или в клети, которая движется внутри металлической шахты, внизу заглубленной в грунт. К шахте прикреплено приемное устройство для разгрузки материалов из транспортных средств прямо в приемное стройство.
Выгрузка осуществляется через проемы в шахте, в которые опрокидывается ковш, шарнирно подвешенный к площадке так, что в загруженном состоянии он стремится опрокинуться вперед. Ковш от опрокидывания предохраняют стойки, по которым он скользит с помощью роликов, прикрепленных по бокам ковша и спереди его. В местах выгрузки эти стойки прерываются и ковш опрокидывается в проем, при этом ролики выходят за пределы шахты по специальным направляющим. Материал из ковша высыпается в разгрузочный лоток. При опускании клети ковш возвращается в прежнее положение, так как ролики снова начинают опираться на стойки.
Шахтные подъемники устанавливают как внутри, так и снаружи здания. Одна из конструкций шахтного подъемника дана на рис. 5.9.
Монтажные вышки и гидроподъемники
(специальные подъемные устройства также относятся к подъемникам). Они предназначены для подъема одного или двух рабочих при выполнении строительно-монтажных работ. Монтажные вышки устанавливают на автомобилях или тракторах.
На рис. 5.10, а
показана кинематическая схема вышки, смонтированной на автомобиле. На люльке помещаются два рабочих с инструментом и необходимыми материалами. Кроме того, вышка может поднимать груз до 0,5 т (5 кН) или натягивать кабель. В транспортном положении вышка укладывается горизонтально.
Вышка представляет собой телескопическое устройство из пяти труб. Люлька закреплена на центральной трубе. Трубы выдвигают по вертикали при помощи канатов и лебедки, причем все трубы поднимают одновременно с одинаковой скоростью. Привод лебедки выдвижения труб осуществляется от двигателя автомобиля через коробку отбора мощности. Груз поднимается отдельной лебедкой, которая также приводится в движение от коробки отбора мощности. Для укладки вышки в горизонтальное положение имеется канат, который наматывается на барабан лебедки выдвижения труб.
Для ограничения подъема люльки применяют конечный выключатель, который автоматически выключает систему зажигания автомобиля. В целях безопасности работы между трубами расположены сальники, которые не дают воздуху выходить из пространства между трубами. При обрыве троса или отказе тормозного устройства лебедки воздушная подушка, образующаяся в нижнем закрытом конце каждой трубы, не дает опуститься внутренней трубе. На этом принципе построен ряд вышек, монтируемых не только на автомашинах или тракторах, но и стационарных.
Более широкое применение имеют гидроподъемники, позволяющие перемещать люльку не только вертикально, но и в различных направлениях. Они успешно заменяют стремянки, леса, подвесные люльки и другие приспособления для монтажа, ремонта и обслуживания линий электропередачи и связи, ремонта, окраски и очистки зданий и сооружений, а также для других работ.
Основной несущей конструкцией гидроподъемника является складывающаяся шарнирная мачта с двумя люльками. Мачта может поворачиваться на 360° в горизонтальной плоскости и на 270° в вертикальной. Это позволяет перемещать люльки в различных направлениях и на разную высоту. Независимо от положения мачты, люлька всегда удерживается в вертикальном положении с помощью специального механизма.
Грузоподъемники этого типа позволяют поднимать люльку на высоту до 12 м при радиусе действия люлек от оси вращения до 9 м; грузоподъемность их до
0,5 т.
Управление мачтой осуществляется при помощи гндроцилиндров и канатно-блочных устройств. Питание гидроцилиндров осуществляется масляным насосом, приводимым в движение от двигателя автомобиля через коробку отбора мощности.
СТРОИТЕЛЬНЫЕ КРАНЫ
Легкие переносные краны применяют при выполнении сравнительно малых объемов работ и при необходимости поднимать и перемещать грузы массой до 1 т на расстояние до 4 м. Большим преимуществом этих кранов является возможность их установки не только на земле, но и на зданиях. Один из таких кранов КЛ-1а показан на рис. 5.18, а.
Он состоит из основания 1
и поворотной платформы 2, на которой смонтированы лебедка 5, стрела 7 и плиты противовеса 3.
Масса этого крана без противовеса составляет 0,9 т, а с противовесом - 1,65 т. Мощность двигателей 3 кВт. Поворот крана осуществляется вручную рычагом 8
усилием не более 12 кгс (120 Н). Для стопорения на кране установлено тормозное устройство, управляемое ручкой 4.
Изменение вылета стрелы осуществляется стреловым канатом 6.
Скорость подъема груза 0,2 м/с.
Консольно-балочные краны
(рис. 5.18, б)
применяют для подачи материалов внутрь здания через оконные проемы при отделочных, ремонтных и сантехнических работах. Грузоподъемность их до 100 кг, вылет стрелы до 3 м, высота подъема 60—70 м, средняя скорость подъема грузов 0,25 м/с. Такой кран состоит из вертикальной стойки 2, устанавливающейся внутри помещения, и стрелы, по которой движется тележка 4
с крюком. Груз поднимается электрической лебедкой. Грузовая тележка перемещается вдоль стрелы при помощи ручной лебедки.
Стационарные краны.
М а ч т о в ы е к р а н ы
наиболее просты по конструкции. Их особенностью является независимое выполнение металлоконструкций и механизмов. Эти краны в строительстве применяют редко. Одним из видов мачтовых кранов являются кран-мачты. Они состоят из мачты / и стрелы 2, прикрепленной к мачте в верхней или средней ее части (рис. 5.19). Стрела может выполняться поворотной и неповоротной. В обоих случаях мачта раскрепляется вантами 3,
которые удерживаются якорями. Грузоподъемность таких
кранов до 100 т, высота подъема грузов —до 60 м.
М а ч т о в о - с т р е л о в о й в а н т о в ы й
кран показан на рис. 5.20, а.
На пяте 1
установлена мачта 2
с вантами 3,
которые крепятся к оголовку 4
мачты. Установка крана на пяте и оголовок
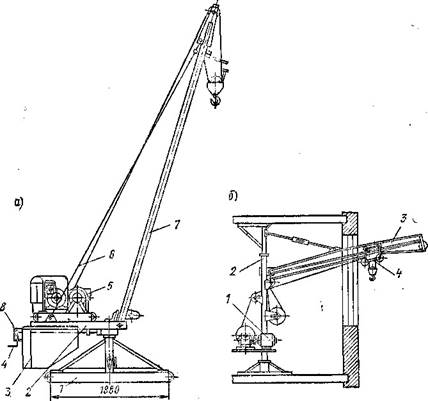
Рис. 5.18. Легкие переносные краны:
1
— электродвигатель привода; 2
— раздвижная трубчатая стойка; 3
— стрела; 4
— тележка
позволяют поворачивать мачту. К основанию мачты шарнирно прикреплена стрела 6,
верхний конец которой подвешен на стрелоподъем-ном полиспасте
5.
В вантовых кранах стрела короче мачты на 20—40%, и при угле наклона стрелы 30° стрелу можно поворачивать на 360°. В этих кранах стрела часто оборудуется гуськом, что позволяет увеличить высоту подъема груза, но при этом снижается грузоподъемность.
На рис. 5.20, а,
кроме того, приводятся кривые изменения высоты подъема крюка и изменения грузоподъемности в зависимости от наклона стрелы и положения гуська.
М а ч т о в о - с т р е л о в ы е (ванто вые ) к р а н ы
применяют для монтажа тяжелого оборудования. Грузоподъемность их до 40 т. На рис. 5.20, б, в
показана конструкция опор мачтово-стреловых кранов. Верхняя опора (рис. 5.20, б)
представляет собой ось, жестко закрепленную в верхнем конце мачты. На ось свободно
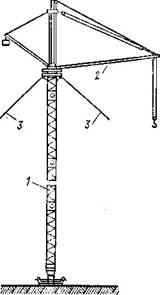
Рис. 5.19. Кран-мачта с поворотной стрелой
надевается головка в виде диска, к которой прикреплены верхние концы вант. Нижние концы вант крепятся к якорям. Нижняя опора (рис. 5.20, е) состоит из стальной чаши с шаровой головкой. Внутренняя полость головки представляет собой цилиндрический подшипник, в который входит цапфа на конце мачты. Верхняя часть головки включает в себя кольцевой подпятник, в который упирается торец мачты. При такой конструкции перекосы мачты не вызывают дополнительных сил трения в цилиндрическом подшипнике и его заклинивания. При эксплуатации мачтово-стреловых кранов приходится определять диаметр вант и расстояние от оси мачты до точки закрепления вант на якоре, отчего зависит угол наклона вант к горизонту. Мачта раскрепляется несколькими вантами, распределение усилий в которых зависит от жесткости конструкции, положения стрелы с грузом, величины предварительного натяжения вант и других условий.(Поэтому расчет вант ведут заведомо с некоторым запасом, считаяу что все усилия как бы передаются на одну ванту и стрела крана находится в плоскости ванты.
Из уравнения моментов относительно точки О
(рис. 5.20, г)
может быть определено усилие в ванте SB:
S
в
=G
oбщ
(l
cos a +k
) +G
ст
(0,5l
cosa +k
) + 0,5W
в
l
sin a /H
cos
b
(5.19)
где Gобщ
— общая нагрузка на оголовке стрелы, т;
G
общ
= G
гр
+ G
з
+ G
г.п
+ G
н.о
Grp
— вес полезного груза, т; Gз
— вес грузозахватного приспособления (крюка, траверсы и т.д.), т; Gг.п
— вес грузового полиспаста, включающий вес верхней и нижней обоймы и каната, т; Gн.о — вес нижней обоймы, закрепленной на стреле, т; Gст
— вес стрелы, т; Wв
— сила давления ветра, т.
Величина rз
равна Н
cos b. Следовательно, чем больше b, тем больше усилие в вантах. Угол b следует делать не больше 30°.
Если мачта поддерживается четырьмя вантами, то возможно такое положение, когда усилие передается только на одну ванту. В этом
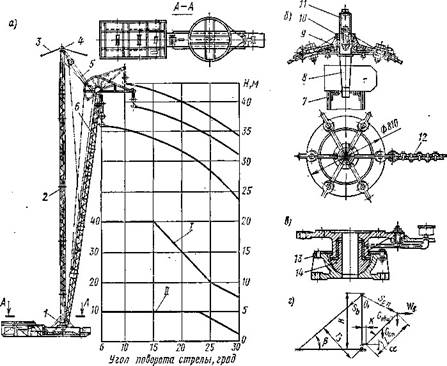
Рис. 5.20. Мачтово-стреловой вантовый кран:
1
— пята; 2
— мачта; 3
— оттяжки; 4
— оголовок мачт; 5
— полиспаст; 6
— стрела; 7
— конец мачты; 8
— ось; 9
— головка; 10
— бронзовый вкладыш; 11
— масленка; 12
— ванты; 13
— чаша; 14
— шаровая головка; / — грузоподъемность крюка основного подъема; // — то же, крюка клюва
случае каждую ванту рассчитывают на полное усилие. При большем количестве вант их можно рассчитывать на меньшую нагрузку, тс (Н):
S
в
= S
вmax
k.
(5.20)
Значения k
при разном количестве вант п:
| п
|
4
|
6
|
8
|
10
|
12
|
| k
|
1,0
|
0,7
|
0,5
|
0,4
|
0,3
|
Ванты подбирают по полученным усилиям с запасом прочности 3,5. Обычно усилие получается небольшим, однако диаметр вант должен быть не менее 19,5 мм для мачт высотой до 20 м и не меньше 23 мм для мачт высотой до 30 м.
Мачтово-стреловые краны просты по конструкции и имеют большую грузоподъемность. Однако то что они устанавливаются стационарно, значительно ограничивает область их применения. Их используют главным образом на складах строительных материалов и изделий, а также при монтаже технологического оборудования крупных объектов.
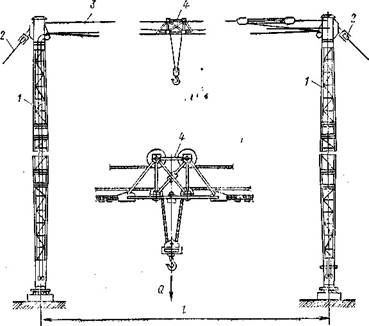
Рис. 5.21. Кабельный кран: 1
— опоры; 2
— расчалки; 3
— канат; 4 —
тележка с полиспастом
Кабельные краны
(рис. 5.21) применяют при строительстве плотин, мостов, промышленных зданий и на крупных складах.
Кран состоит из двух опор, обычно башенных. Между опорами натягивается канат, по которому движется тележка с полиспастом. Канат может закрепляться неподвижно или натягиваться весом контргруза. Натяжение каната может осуществляться дополнительно наклоном одной из опор.
Опоры бывают неподвижными, тогда они закрепляются на фундаменте и раскрепляются расчалками. При такой конструкции кран обслуживает только узкую зону. У подвижных кранов опоры передвигаются по рельсовым путям, причем могут двигаться обе опоры параллельно или одна опора закреплена неподвижно, а
другая передвигается по рельсу, представляющему собой дугу окружности.
Грузоподъемность и длина пролета кабельных кранов различны в зависимости от их назначения. Для погрузочно-разгрузочных работ на складах применяют краны грузоподъемностью 1,5 —
25 т с пролетом до 250 м. Для гидротехнического строительства пролеты кранов достигают 1000 м, а грузоподъемность до 150 т.
Привод каната для подъема груза и перемещения тележки осуществляется лебедкой. Для безопасности работы на лебедках устанавливают концевые выключатели, ограничивающие высоту подъема и длину перемещения тележки.
Основным элементом кабельного крана является несущий канат. Наибольшие усилия будут действовать на канат в тот момент, когда груз находится посредине пролета:
P
= (G
п
+ G
гp
)l
/ 4F
+ G
k
l2
/ 8f
(5.21)
где G
п
— вес тележки с полиспастом, т; G
rp
— вес груза, т; l
— пролет крана, м; f
— стрела провеса каната, f
= (0,035 ¸ 0,05) /; G
k
— вес каната, т.
Башенные краны
применяют в качестве одного из основных грузоподъемных устройств в жилищном и промышленном строительстве. Эти краны делятся на передвижные (рис. 5.22, а),
передвигающиеся по прямолинейным наземным или криволинейным рельсовым путям; стационарные приставные, прикрепляемые к возводимому объекту (рис. 5.22, б);
вертикальные подвижные самоподъемные (рис. 5.22, в).
Башенные краны различают по типу башен — на краны с поворотной башней (рис. 5.22 г)
и неповоротной с поворотным оголовком (рис. 5.22, д),
а также по типу конструкции стрелы — на краны с подъемной стрелой (рис. 5.22, е)
и балочной стрелой (рис. 5.22, ж).
Передвижные башенные краны различают по типу ходового оборудования — на рельсовые, автомобильные, пневмоколесные, гусеничные. Наиболее широко применяют краны на рельсовом ходу; они просты в эксплуатации и обеспечивают высокую безопасность работы крана.
Башенные краны имеют высокую маневренность, большое подкрановое пространство и высокое расположение стрелы, что позволяет ей проходить над монтируемыми конструкциями.
Наземные рельсо-колесные краны изготовляют по ГОСТ 13655—68, а приставные и самоподъемные — по ГОСТ 14274—69. Краны, применяемые в жилищном и гражданском строительстве, имеют грузоподъемность 3,0— 8,0 т, наибольший вылет стрелы 25 м, высоту подъема груза 30 ¸ 50 м, скорость подъема груза 0,3 ¸ 1 м/с, скорость передвижения крана 0,33 ¸ 0,5 м/с; частоту вращения поворотной части 0,5—0,7 об/мин.
Краны для промышленного строительства выпускают грузоподъемностью 20,0 т и более с вылетом стрелы 25—45 м и высотой подъема 50 ¸ 80 м. У этих кранов скорость подъема груза 0,16 ¸ 1,0 м/с, скорость передвижения крана в 2—2,5 раза ниже скорости передвижения кранов для гражданского строительства, т. е. 0,16 ¸ 0,20 м/с, частота вращения поворотной части 0,2 ¸ 0,4 об/мин.
Приставные краны (рис. 5.22, б)
выпускают грузоподъемностью 6,3; 8; 10; 12,5 т с вылетом стрелы до 45 м и высотой подъема до 150 м; скоростью подъема груза 0,33 ¸ 1,5 м/с; скоростью изменения вылета 0,5 м/с; частотой вращения поворотной части 0,5 ¸ 0,7 об/мин.
Наиболее часто применяют краны с поворотной башней. У них центр тяжести находится ниже, чем у кранов с поворотным оголовком, так как большинство узлов расположено у основания крана. Благодаря этой особенности масса кранов с поворотной башней меньше, чем с неповоротной. Эти краны проще монтировать, демонтировать, транспортировать; башня при нагрузке меньше деформируется, что приводит к меньшей раскачке груза.
Кран с поворотной башней (рис. 5.22, г)
состоит из трубчатой или решетчатой башни 1
, закрепленной на упорно-поворотном устройстве 2,
на котором установлен противовес 3.
В верхней части башни монтируется распорка 4
для направляющих роликов и оголовок 5.
На башне закреплена стрела 6.
На кране с балочной стрелой противовес размещается на консоли 7 (см. рис. 5.22, д).
Опорно-поворотное устройство устанавливают на опорной раме 8
(рис. 5.22, з) с четырьмя поворотными кронштейнами 9,
которые опираются на балансирные тележки 10
с противоугонными захватами 11.
Поворотные кронштейны позволяют перемещаться крану на криволинейных участках рельсового пути при малых радиусах закругления в 7—8 м по внутреннему рельсу.
Простота монтажа и демонтажа, возможность демонтировать и монтировать эти краны без разборки на отдельные узлы делает их особенно эффективными.
Краны с подъемной стрелой, у которых вылет стрелы осуществляется ее наклоном, более просты по конструкции, но к недостаткам этих кранов надо отнести то, что у них нельзя полностью использовать подкрановое пространство. Наименьший вылет стрелы у них составляет 30% от наибольшего. При таком креплении стрелы трудно достигнуть точной наводки элементов конструкции, так как при подъеме или опускании стрелы груз перемещается как в вертикальном, так и в горизонтальном направлении.
В кранах с балочной стрелой перемещение груза требует меньшей энергии, но маневренность таких кранов ниже, чем у кранов с подъемной стрелой.
Стационарные (приставные) башенные краны устанавливают на фундаменте и обслуживают площадку с одной стоянки.
Самоподъемные башенные краны применяют главным образом при строительстве многоэтажных и высотных зданий.
На рис. 5.23, а
показана кинематическая схема отдельных механизмов башенного крана с подъемной стрелой и схема запасовки канатов. Стрела поднимается лебедкой и стреловым полиспастом на подвижной обойме (траверсе) 2,
несущей два блока. Полиспаст подъема стрелы четырехкратный. Три блока полиспаста находятся на неподвижной обойме 6,
жестко прикрепленной к поворотной платформе 7. Один конец каната подъема стрелы жестко закреплен на той же неподвижной обойме и перекинут через неподвижный блок /, другой конец каната закреплен на стреловой лебедке.
Механизм подъема стрелы одновременно служит и механизмом опускания груза в процессе подъема стрелы, что обеспечивает движение груза по горизонтали во время ее подъема. Для этой цели один из концов подъемного каната закреплен на барабане лебедки подъема стрелы так, что во время наматывания каната подъема стрелы на барабан канат подъема груза сматывается с барабана. Груз и стрела поднимаются при помощи крановых лебедок.
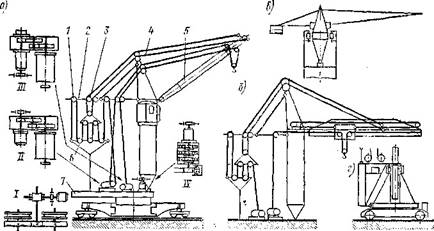
Рис. 5.23. Кинематические схемы башенных кранов:
/ — механизм привода передвижения крана; // — то же, лебедки подъема груза; /// — то же, лебедки подъема стрелы; IV
— механизм поворота башни со стрелой или только стрелы
Лебедки состоят из кранового фланцевого электродвигателя, двухетупенчатого редуктора, тормоза, барабана, выносной опоры и двух сферических опор редуктора. Для плавной посадки груза лебедка снабжена тормозным генератором, обеспечивающим снижение скорости в 5—6 раз, и двухколодочным тормозом с гидротолкателем.
Механизм поворота включает фланцевый вертикально расположенный электродвигатель и планетарный зубчатый редуктор с вертикальными валами. На ведомом валу редуктора снизу располагается шестерня, сцепляющаяся с зубчатым венцом опорно-поворотного круга. Тормоз располагается на втором конце вала электродвигателя в горизонтальном положении. Смазка шестерен и подшипников редуктора принудительная. Редуктор имеет две проушины, которыми он крепится к поворотной платформе.
Кран опирается на четыре двухколесные балансирные тележки. Две тележки являются ведомыми (неприводными), две — ведущими. Привод тележки осуществляется от фланцевого двигателя через червячный редуктор. Тележки снабжены центральным захватом для закрепления крана за рельсы в нерабочем состоянии.
Для восприятия грузового момента и вертикальных нагрузок поворотная часть крана соединяется двухрядным шариковым опорно-поворотным кругом с неповоротной частью. На внутреннем кольце круга предусмотрен зубчатый венец, с которым связана ведущая шестерня механизма поворота. На рис. 5.23, б
показана схема крана с балочной стрелой. Горизонтальное перемещение груза производится грузовой кареткой, движущейся вдоль стрелы, но может также осуществляться поворотом стрелы или передвижением всего крана. Стрела удерживается на кране канатами и полиспастным устройством, подобным тому, каким оборудованы краны с подъемной стрелой.
Поворотный оголовок (рис. 5.23, в)
устанавливается на подпятнике и роликах. Поворотная башня (рис. 5.23, г)
устанавливается на_водов
оротной платформе.
Монтаж и демонтаж башенных кранов с поворотной башней могут осуществляться без их разборки на отдельные сборочные единицы. Для монтажа и демонтажа используются механизмы крана.
Демонтаж крана показан на рис. 5.24. Стрелу крана опускают в крайнее нижнее положение //, после чего разъединяют среднюю и крайнюю секции стрелы. Эти секции прикрепляют к башне (положение ///). Затем ее разъединяют с основанием и опускают в горизонтальное положение. Башню со стрелой укладывают на домкрат / (положение IV),
поворачивают тележку (положение V) и под тележку крана подводят ось 2
с автомобильными колесами, после чего под передвижную часть крана подводят тягач 3
и опускают домкрат. В таком виде кран транспортируют.
Монтаж осуществляется в обратном порядке. Эксплуатация башенных кранов допускается только после их освидетельствования, включающего осмотр, статические и динамические испытания. Согласно правилам Госгортехнадзора СССР статические испытания проводятся под нагрузкой, на 25% превышающей максимальную грузоподъемность крана. Во время испытания стрелу устанавливают относительно неповоротной части в положение, соответствующее наименьшей устойчивости, при этом груз поднимается на высоту 100—200 мм и выдерживается 10 мин. Динамические испытания проводятся грузом, на 10% превышающем грузоподъемность крана. При этом выполняются все рабочие движения и проверяется действие механизмов и их тормозов.
Устойчивость крана проверяют для следующих условий: 1) при действии рабочего груза — грузовая устойчивость; 2) при отсутствии груза — собственная устойчивость определяется для двух случаев — при возможности и невозможности свободного вращения крана; 3) при внезапном снятии нагрузки на крюке; 4) при монтаже (демонтаже) крана.
Расчет грузовой устойчивости крана должен производиться для условий действия опасной комбинации нагрузок относительно ребра опрокидывания, когда кран по устойчивости максимально приближается к предельному состоянию. Расчет на устойчивость производится для свободно стоящих кранов без учета действия рельсовых захватов и свободно подвешенных стрел.
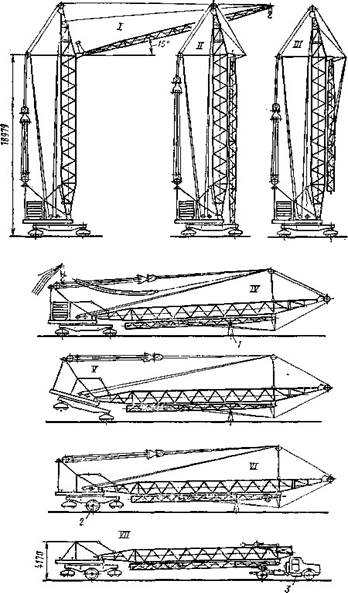
Рис. 5.24. Демонтаж башенного крана с поворотной башней
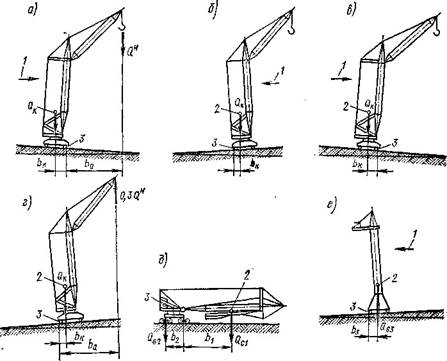
Рис. 5.25. Схемы для расчета устойчивости: / — направление ветра; 2 —
центр тяжести; 3
— ребро опрокидывания
Козловые краны широко применяются для монтажа тяжеловесного оборудования, для подачи строительных материалов и строительных конструкций при возведении монолитных сооружений. Эти краны делают грузоподъемностью 1 ¸ 500 т.
Кран (рис. 5.26) состоит из мостовой балки (фермы), которая опирается на две опоры, установленные на ходовые рельсовые тележки. По мостовой балке передвигается тележка с подъемным механизмом или электроталь. Краном обычно управляют из кабины. Эти краны просты по конструкции, устойчивы, имеют постоянную грузоподъемность и высоту подъема по всей рабочей зоне.
Величина пролета между опорами 10 ¸ 50 м. У некоторых кранов мостовая балка имеет две консоли по концам, что увеличивает рабочую зону. Длина консолей делается 4 ¸ 10 м. На некоторых моделях козловых кранов можно увеличивать пролет с помощью вставок в мостовую балку, но при этом снижается грузоподъемность. Высота козловых кранов достигает 30 м.
Стреловые самоходные краны. Краны с собственным приводом для свободного перемещения по местности называются самоходными.
На этих кранах устанавливают стреловое или башенно-стреловсе оборудование. Они предназначены для выполнения строительно-монтажных и перегрузочных работ.
Самоходные краны разделяют по грузоподъемности на легкие грузоподъемностью до 10 т, средние — грузоподъемностью 10 ч- 25 т и тяжелые от 25 т и более. На специальных монтажных работах в СССР уже сейчас работают краны грузоподъемностью 250 т.
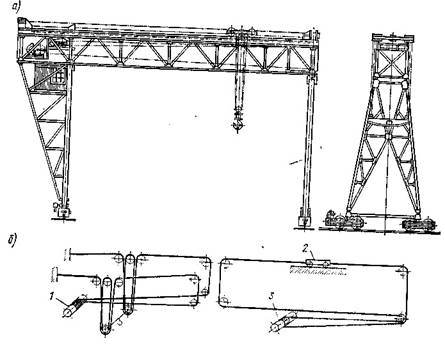
Рис. 5.26. Козловый кран:
а —
внешний вид; б —
схема запасовки канатов для перемещения тележки: / — барабан подъемной лебедки; 2 —
грузовая тележка; 3
— барабан тяговой лебедки
По конструкции ходового устройства краны делят на гусеничные и пневмоколесные. Последние разделяются на краны автомобильные, ходовым устройством которых служит шасси автомобиля, и краны на специальном ходовом устройстве в виде специального шасси автомобильного типа.
По типу привода механизмов различают краны с одномоторным и многомоторным приводом. В последнее время все большее применение получают краны с гидравлическим приводом.
Автомобильные краны
предназначены для монтажа строительных конструкций, ремонтных работ, погрузки и разгрузки штучных грузов, при оборудовании грейфером — сыпучих и мелкокусковых материалов. Привод механизмов крана осуществляется от двигателя автомобиля. Это может достигаться двумя способами. При групповом приводе механизмы управления грузовым и стреловым барабанами и поворотом платформы вместе со стрелой приводятся в движение от вмонтированной в трансмиссию автомобиля коробки отбора мощности разветвленными механическими трансмиссиями. При индивидуальном приводе на шасси устанавливают генератор, который приводится в движениеоттрансмиссии автомобиля. Электроэнергия, вырабатываемая генератором, питает электродвигатели отдельных механизмов крана.
Выпускаемые в СССР автомобильные краны можно разделить на две большие группы: грузоподъемностью 2,5 ¸ 5 т с грузовым моментом 7,5 ¸ 19 тс*м (75—190 кН*м) и грузоподъемностью 6 ¸ 16 т с грузовым моментом 21 ¸ 62 тс*м (210—620 кН*м). Некоторые из кранов оборудуют сменными стрелами различной длины.
Автомобильные краны отличаются высокой маневренностью и большой скоростью передвижения (до 60 км/ч без груза), что позволяет применять их для выполнения рассредоточенных работ. Скорость передвижения крана с грузом не превышает 5 км/ч.
Различают автомобильные краны с канатной подвеской стрелового оборудования и механическим, электрическим или гидравлическим приводом, а также гидравлические краны с жесткой подвеской гидравлического оборудования.
На рис. 5.27, а
показан автомобильный кран, а на рис. 5.27,б
— кинематическая схема. На шасси грузового автомобиля / вместо кузова устанавливается ходовая рама 3,
а на ней — поворотная рама 5.
Эти рамы соединяются поворотным устройством 4.
На раме 5
установлен механизм 6
подъема и опускания груза и стрелы, механизм 7 поворота рамы с механизмами и стрелы 10,
реверсивного распределительного механизма 8,
противовеса, кабина. Автомобильные краны, как правило, снабжены выносными опорами 2,
которые крепятся к раме 3.
Благодаря опорам увеличивается устойчивость крана: Грузоподъемность кранов при работе с выносными опорами увеличивается на 75—80%.
Механизмы крана рассчитаны на грузоподъемность при работе с опорами. При работе краны на выносных опорах упругие подвески шасси прогибаются. При работе без выносных опор правая и левая подвески моста деформируются неравномерно, что приводит к наклону поворотной рамы.
Для повышения устойчивости автомобильных кранов они снабжены выключателями подвесок, жестко соединяющими шасси с его рамой, или стабилизаторами 9,
соединяющими шасси с рамой, уравнивающими деформацию подвесок.
Для безопасной работы крана на стреле установлен автоматический сигнализатор опасных напряжений 11,
предупреждающий машиниста о приближении стрелы крана на опасное расстояние (не менее 1 м) к одноили многофазной линии электропередачи. На растяжке 9
между полиспастом и головкой стрелы имеется автоматический ограничитель грузоподъемности. Кроме того, краны оборудуются ограничителями подъема крюка и вылета, а также устройствами, сигнализирующими о предельных значениях крена.
Привод механизмов крана осуществляется от основного двигателя через коробку отбора мощности / (рис. 5.27, б),
конический редуктор // и реверсивный механизм ///. Последний приводит в движение шестерню 12
распределительного механизма IV,
которая приводит в движение зубчатые колеса 13
и 16,
приводящие в движение червячный привод грузовой V
и стреловой лебедки VI.
Зубчатые колеса 13
и 16
сидят свободно на валах и приведение вала в движение возможно только после включения кулачков 14
и 15.
Зубчатое
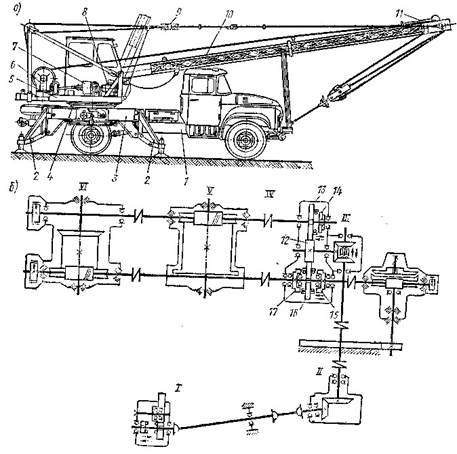
Рис. 5.27. Автомобильный кран
колесо 16
приводит в движение механизм поворота, для этого надо включить кулачок 17.
Эта схема имеет тот недостаток, что при включении реверса происходит реверсирование движения у всех механизмов. Поэтому на ряде кранов устанавливаются распределительные коробки с реверсивными механизмами, позволяющими реверсировать каждый из приводимых в движение механизмов независимо.
В последнее время все большее применение получают автомобильные краны с гидравлическим управлением.
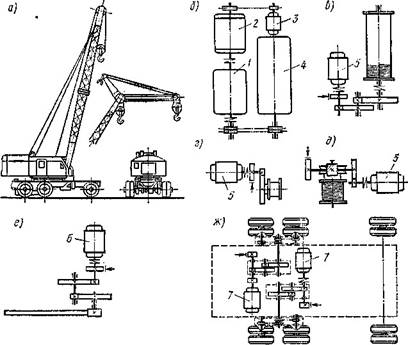
Рис. 5.28. Кран пневмоколесный на специальном шасси:
а
— общий вид; б
— кинематическая схема дизель-электрической установки; в
— то же, грузовой лебедки (главной); г
— то же, грузовой лебедки (вспомогательной); д
— то же, стрелоподъемной лебедки; е
— то же, механизма вращения платформы; ж
— то же, механизма передвижения крана; 1,2, 3
— генераторы постоянного тока; 4
— дизель; 5 , 6 , 7
— электродвигатели
Недостатком конструкции автомобильных кранов является сравнительно малая устойчивость. Для повышения устойчивости при работе под кран подводят механические, гидравлические или пневматические выносные опоры (аутригеры). При подъеме груза, масса которого значительно меньше номинальной грузоподъемности, опоры не устанавливают и кран может передвигаться вместе с грузом.
Основные показатели этих кранов зависят от того, работает кран с выносными опорами или без них. Например, автомобильный кран К-52 при длине стрелы 12 м имеет максимальную грузоподъемность 3 т при работе на выносных опорах и не больше 1 т при работе без опор. В автомобильных кранах, оборудованных дизель-электрическим приводом, двигатель внутреннего сгорания через карданный вал приводит в движение электрогенератор.
Привод грузоподъемной лебедки, грейферной лебедки, стрелоподъемной лебедки, а также механизма вращения платформы осуществляется от отдельных электродвигателей, которые питаются электроэнергией, вырабатываемой генератором.
Слециальные (колесные и гусеничные) краны
устанавливают на шасси, имеющем более широкую базу. В пневмоколесных кранах число осей доходит до шести. Эти краны оборудуют короткими стрелами, если они предназначены для погрузочно-разгрузочных работ, или длинными стрелами — для монтажных работ.

Рис. 5.29. Тракторные краны:
а
— общий вид; б
— кинематическая схема; 1 — червячный редуктор грузовой лебедки; 2
— трехступенчатый цилиндрический редуктор; 3
— распределительная коробка с реверсом; 4
— муфта включения; 5 — механизм вращения; 6
— распределительная коробка; 7
— червячный редуктор стреловой лебедки
Последнее время для грузоподъемности до 30— 40 т получают распространение краны с телескопически выдвигающимися стрелами. Это позволяет при работе с длинными стрелами сократить срок подготовки их к работе и переброске до 20—30 мин. Грузоподъемность пневмоколесных кранов доходит до 250 т, длина стрелы до 120—130 мм (с наголовником). Как правило, пневмоколесные краны стреловые, хотя имеются и краны башенные.
Краны на специальном шасси, как правило, выпус кают с многомоторным при водом. На рис. 5.28 показан общий вид и кинематические схемы механизмов полноповоротного крана с дизель-электрическим при водом грузоподъемностью 25 т на колесном ходу. Дизель приводит в движение три генератора постоянного тока. Вырабатываемый ими ток приводит в движение электроприводы отдельных механизмов. Специальные шасси выполняются не только колесными, но и гусеничными. Кроме того, краны на гусеничном ходу изготовляют на базе тракторов промышленного применения. Их максимальная грузоподъемность 5—6 т, длина стрел 12 м.
У таких кранов на тракторе жестко закреплена рама, на которой монтируют поворотный круг в виде двойного упорного шарикового подшипника. На платформе размещены стрела, стойки для блоков,
Рис. 5.30. Кран-трубоукладчик:
/ — стрела; 2
— лебедка; 3
— контргруз; 4
— рама контргруза
лебедки, редукторы приводного и поворотного механизмов. У некоторых кранов на поворотном круге помещена и кабина крановщика. Привод механизмов подъема стрелы, подъема груза, поворота в этих кранах бывает одномоторным — в этом случае движение механизму крана передается от вала отбора мощности двигателя трактора через распределительную коробку и муфту включения или индивидуальным, когда генератор приводится во вращение от переднего вала двигателя, что позволяет работать при отключенной ходовой части трактора.
Общий вид тракторного крана и кинематическая схема его показаны на рис. 5.29, а, б.
Чтобы повысить устойчивость, краны большой грузоподъемности оборудуют двумя выдвижными опорами (домкратами). Для предотвращения раскачивания поднятого груза при деформации тракторных рессор последние во время работы выключают. Это обеспечивает жесткую связь гусеничного хода трактора со всей конструкцией крана. На базе трактора выпускают краны-трубоукладчики (рис. 5.30) различных конструкций грузоподъемностью 3 ¸ 90 т. У таких кранов на тракторе устанавливается дополнительная рама, на которой размещают лебедки для подъема груза и стрелы. Привод лебедок осуществляется от коробки отбора мощности через систему зубчатых передач. В тяжелых кранах гусеницы трактора раздвигаются для улучшения устойчивости.
Специальные краны на гусеничном ходу выполняют или на базе экскаватора, или на специальном шасси. Основным преимуществом гусеничных кранов по сравнению с пневмоколесными является их высокая проходимость. Удельное давление на грунт у них не превышает 1,5 кгс/см2
(0,15 МПа).
Гусеничные краны делят на четыре группы: грузоподъемностью 5—10 т с грузовым моментом 12 ¸ 50 тс*м; грузоподъемностью 15 ¸ 25 т с грузовым моментом 54 ¸ 137 тс-м (540—1370 кН*м); грузоподъемностью 30 ¸ 100 т с грузовым моментом 150 ¸ 600 тс-м (1,5 — 6 МН*м). Имеются краны на гусеничном ходу грузоподъемностью до 250 т. Гусеничные краны на дальние расстояния перевозят железнодорожным транспортом или тяжеловозами.
ОСНОВНЫЕ ФИЗИКО-МЕХАНИЧЕСКИЕ СВОЙСТВА ГРУНТОВ
На работу землеройных машин влияют следующие физико-механические свойства грунта:
1. Гранулометрический состав, т. е. процентное содержание по весу частиц различной крупности.
2. Объемная масса у
— масса 1 м3
грунта, взятого в естественном состоянии, вместе с порами (в плотном теле). Для грунтов у
= 1,5—2 т/м3
.
3. Пористость — объем пор, заполненных водой и воздухом в процентах от общего объема грунта,
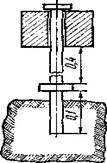
Рис, 8.1. Ударник конструкции ДорНИИ
4. Влажность — объем воды в грунте, в %.
5. Связность — характеризуется усилием, необходимым для преодоления сцепления одних частиц с другими и их относительного смещения.
6. Пластичность — свойство грунта изменять форму под действием внешних сил и сохранять эту форму после их удаления.
7. Прочность — свойство грунта сопротивляться разрушению под влиянием внешних нагрузок.
8. Сопротивление грунта вдавливанию. При движении машин движители вдавливаются в грунт. Вдавливание на небольшую глубину называют смятием. Величина силы, необходимой для вдавливания на глубину в 1 см штампа площадью в 1 см2
, т. е. удельное сопротивление вдавливанию, называется коэффициентом сопротивления смятию Р0
.
Для различных грунтов Р0
= 0,05 ¸1,3 кгс/ см2
(0,5 ¸ 130 кПа). Величина допускаемых давлений Р0
на движители составляет 0,4 ¸ 1,5 кгс/см2
(40 ¸ 150 кПа).
9. Абразивность — способность материала оказывать истирающее действие. За меру абразивности принят относительный износ w0
, измеряемый отношением объемного износа стали Dv
c
к объемному износу грунта или породы Dv
c
:
w0
=
Dv
c
/
Dv
п
10. Коэффициент трения стали о грунт ц и грунта о грунт m для грунтов, находящихся в естественном состоянии, колеблется в пределах соответственно 0,3 ¸ 0,7 и 0,3 ¸ 0,9.
11. Разрыхляемость — способность грунта увеличивать объемы при разрушении. Разрыхляемость измеряется коэффициентом разрыхления k
р
, равным отношению объема разрыхляемого грунта к объему, который он занимал в естественном состоянии. В зависимости от категории грунта kp
изменяется от 1,2 до 1,5.
12. Угол естественного откоса j — угол у основания конуса, который образуется при осыпании разрыхленного грунта с некоторой высоты. Величина j зависит от коэффициента внутреннего трения и от связности. Для несвязных грунтов угол естественного откоса равен углу внутреннего трения. Величины углов естественного откоса зависят от категории грунта и его состояния и составляют 15—40°.
Оценить трудность разработки грунтов по вышеперечисленным параметрам в производственных условиях сложно, поэтому Госстрой СССР на основные типы грунтов разработал производственную классификацию грунтов по трудности их разработки: I — мелкий грунт (песок); II—III — средний (супесь); IV — тяжелый (глина). Однако эта классификация основана только на качественной оценке и не учитывает некоторых важных свойств, например влажности. Это приводит иногда к несоответствию фактической трудоемкости разработки с расчетной. Поэтому был предложен способ оценки разрабатываемости грунтов с помощью ударника
(плотномера) ДорНИИ (рис. 8.1).
Он представляет собой стержень, по которому между двумя приваренными на расстоянии 40 мм шайбами сбрасывается груз массой 2,5 кг. Стержень устанавливают одним концом на поверхность грунта, поднимают груз в верхнее положение и опускают его. Падая, груз ударяет по нижней шайбе, при этом работа одного удара составляет 1 кгс-м (10 Н-м). Под действием силы удара стержень внедряется в грунт. В зависимости от свойств грунта для внедрения стержня на глубину 100 мм требуется различное число ударов: например, в просеянный песок влажностью 9,2% требуется всего один удар, а в легкий суглинок влажностью 10,6% — 12 ударов. Между числом ударов и сопротивлением грунтов резанию имеется следующая зависимость:
| Категория грунта
|
I
|
II
|
III
|
IV
|
| Число ударов С
|
1—4
|
5—8
|
9—16
|
16—34
|
ЗЕМЛЁРОИНО-ТРАНСПОРТНЫЕ МАШИНЫ
Машины, отделяющие грунт от массива и перемещающие его на сравнительно небольшие расстояния, называются землеройнотранспортными. К этому классу машин относятся бульдозеры, скреперы, грейдеры и грейдер-элеваторы. Землеройно-транспортные машины просты по конструкции и высокопроизводительны. Для управления требуется один водитель, дополнительные транспортные средства не нужны. Удельная производительность на водителя достигает 1000 м3
/ч. Стоимость работ в 3— 4 раза меньше стоимости работ, выполняемых экскаваторами с авто- , самосвалами.
Бульдозер представляет собой гусеничный или колесный тягач (базовая машина) с навесным оборудованием, имеющим рабочий орган в виде отвала , соединенного с толкающими брусьями .
Для подъема и опускания отвала служит гидроцилиндр .
Различают бульдозеры: 1) с неповоротным отвалом; последний закрепляется жестко перпендикулярно продольной оси машины. Такие бульдозеры применяют для устройства выемок, возведения насыпей, планировки площадок, разработки и засыпки траншей; 2) с поворотным отвалом; отвал может поворачиваться на угол j' в горизонтальной плоскости и на угол a в вертикальной плоскости, что позволяет перемещать грунт не только вперед, но и в сторону. Этими бульдозерами можно нарезать террасы на косогорах, засыпать траншеи, расчищать дороги от снега.
Помимо основного рабочего органа — отвала на раму бульдозера могут быть навешены устройства для толкания скреперов, рыхлители, кусторезы, канавокопатели, корчеватели и другое сменное оборудование, что значительно расширяет область применения бульдозеров.
В начале работы заглубляется режущая часть отвала, при этом бульдозер одновременно перемещается вперед. Отделяемый от массива грунт накапливается впереди ножа, образуя призму волочения. Отделение грунта от массива происходит до тех пор, пока призма волочения не достигнет верхней кромки отвала. Затем отвал на ходу поднимается на поверхность грунта, продолжая перемещать призму волочения к месту отвала. Встречаемые бульдозером углубления засыпаются грунтом призмы волочения; возвышения срезаются режущей частью отвала. Если перемещаемый материал необходимо распределить по поверхности, то отвал при движении бульдозера поднимают.
Главным параметром бульдозера считается номинальное тяговое усилие, основными параметрами — масса и мощность.
Бульдозеры классифицируются по тяговому усилию и по мощности базовой машины: легкие 20¸80, средние 80¸150, тяжелые 150¸300, сверхтяжелые более 300 кВт.
Отвалу бульдозера необходимо задавать четыре положения. Схема управления отвалом для этих положений показана на рис. 8.7, где она дается в принятых условных обозначениях, и для лучшего представления она показана в виде конструктивных схем на рис. 3.11, е.
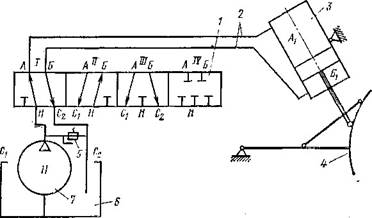
Рис. 8.7. Гидравлическое управление бульдозера
Положение 1
— опускание отвала. Для этого золотник распределителя устанавливается в положение 1
, масло через отверстие подачи Н
и отверстие А
в распределительном устройстве подается в полость А
1
цилиндра и через отверстие Б
и С
2
сливается в бак.
Положение // — подъем отвала. Золотник занимает положение //, масло из отверстия Н
и отверстия Б
подается в полость Б1
цилиндра и сливается через отверстие А
и С
1
.
Положение /// — плавающее положение отвала. Золотник закрывает отверстие подачи масла Н
и масло из полостей А1
и Б1
цилиндра сливается через отверстия А, Б, С
1
и С
2
. В этом положении отвал может перемещаться вверх и вниз в зависимости от встречаемых сопротивлений.
Положение IV
— отвал поднимается в верхнее положение /// и затем золотник устанавливается в положение IV,
закрывая отверстия А, Б
и Н
так, что масло не может сливаться из полостей цилиндра и подаваться в цилиндр. Масло, подаваемое насосом, сливается через предохранительный клапан в бак.
Рабочий орган — отвал представляет собой металлическую сварную конструкцию из листа, ребер жесткости, проушин для крепления отвала к толкающим балкам. Энергоемкость и производительность бульдозера в значительной степени зависят от рациональной формы отвала.
Отвал срезает грунт, накапливает его впереди себя и перемещает его. Профиль отвала подбирают таким образом, чтобы срезаемый грунт от массива двигался по отвалу и обрушивался по направлению движения бульдозера (рис. 8.8, а).
При этом менее всего тратится работы на трение грунта о грунт. Если профиль подобран неправильно,
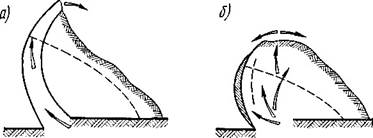
Рис. 8.8. Характер перемещения грунта и формирование призмы волочения
то срезаемый грунт в процессе формирования призмы двигается вверх не по поверхности отвала, а выпучивает массу грунта, образующую призму (рис. 8.8, б). Это приводит к интенсивному трению между частицами грунта. На рис. 8.9 приводится геометрия отвала, а в табл. 8.1 его основные параметры.
Таб лица 8.1 Основные параметры отвала
| Параметры
|
Отвал
|
| неповоротны
|
й поворотный
|
| Высота отвала без
козырька Н
|
500—1600 мм
|
400—1400 мм
|
| Угол резания d
Угол наклона отвала e
Задний угол a
Угол установки козырька bк
Заглубление h
|
55°
75°
30—35°
90—100°
До 300
|
50—55°
75°
30—35° 90—100°
мм
|
При работе бульдозера возникают следующие силы (рис. 8.10): сила сопротивления резанию грунта Р
р
,
сила сопротивления внедрению рабочего органа в грунт Р
п
,
сила трения грунта призмы волочения о грунт Р
пр
,
сила трения режущей кромки отвала по грунту Р
тр
1, а также сила трения грунта при его перемещении по отвалу Р
тр
2 Сумма всех составляющих этих сил, направленная по оси движения бульдозера, должна быть меньше силы тяги по сцеплению Т
сц
.
Производительность бульдозера зависит от формы отвала, длины транспортирования, свойств грунта (песок или глина), работы под уклон или на подъем. При работе под уклон уменьшается сопротивление перемещению призмы волочения и одновременно увеличивается сила тяги. Это позволяет повысить толщину срезаемого слоя и объем перемещаемого грунта, и наоборот, при работе на подъем производительность резко падает. Сопротивление перемещению бульдозера возрастает с увеличением призмы волочения. Поэтому целесообразно срезать слой переменного сечения в начале глубиной на 25-30% больше, чем в конце.
Формирование призмы волочения происходит на 5—7 м пути. Срезание грунта обычно производят на первой и второй передачах, а перемещение на первой и третьей. В процессе перемещения часть грунта
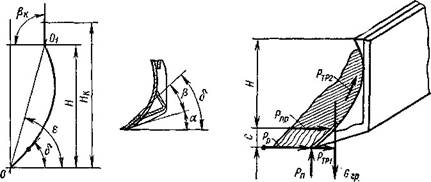
Рис. 8.9. Геометрия отвала Рис. 8.10. Силы, действующие на
отвал бульдозера
призмы волочения высыпается за пределы отвала. Эти потери грунта значительно влияют на производительность. Для несвязных грунтов они составляют 6—7% на каждый 1 м перемещения бульдозера, а для связных грунтов — 2,5—3,2%. Потери уменьшаются почти в два раза, если одновременно работают два бульдозера, устанавливаемые один от другого на расстоянии 0,25—0,3 м для грунтов I и II категории и до 0,5 м для грунтов III категории. При такой работе производительность увеличивается на 10—15%.
Перемещение грунта в два или три этапа повышает производительность, если перемещение ведут в два или три этапа, но сначала грунт перемещают на половину или одну треть пути. На этом промежуточном этапе накапливают 100—200 м3
грунта, а затем перемещают его дальше. При таком способе грунт меньше теряется и производительность возрастает на 5—10%.
Для сокращения времени холостого хода при расстояниях за 30— 50 м холостой ход целесообразно производить на максимальной скорости обратного хода, при этом выигрывается время, которое шло бы на разворот бульдозера. При больших расстояниях холостой ход производят движением вперед.
Техническая производительность бульдозера в общем случае
П
т
= 3600q
ф
k
т
/ Tц, м3
/ч,
(8.6)
где qф — объем призмы волочения, м3
/ч; Т
ц — время цикла, с; k
т —
коэффициент, учитывающий конкретные условия работы.
Автогрейдер
является одной из основных машин, предназначенных Для строительства дорог и их содержания. С помощью него профилируют земляное полотно, возводят насыпи высотой до 0,6 м, перемещают и разравнивают грунт по дорожному полотну, планируют площадки и т. д. Прицепные грейдеры постепенно выходят из применения. В последнее время получают развитие только автогрейдеры (рис. 8.11), которые выпускаются мощностью 250 кВт.
Рабочий орган автогрейдера — отвал устанавливается под углом в плане к оси машины и с подъемом к оси дороги. При движении автогрейдера он срезает грунт и перемещает его к середине дороги.
После определенной длины прохода, которая выбирается в пределах 200—1500 м в зависимости от профиля дороги и условий работы, автогрейдер перемещается на другую сторону дороги и разрабатывает грунт в обратном направлении.
Автогрейдеры подразделяются на легкие (для ремонта грунтовых дорог) мощностью до 100 кВт, средние — от 100 до 150 кВт и тяжелые — свыше 160 кВт. Почти все автогрейдеры выполняются трехосными с двумя задними ведущими осями. Автогрейдеры часто снабжают кирковщиками для разрушения дорожной одежды, а в зимнее время на них устанавливаются плужные снегоочистители. Иногда на базе автогрейдера собирают грейдерэлеватор (см. ниже).
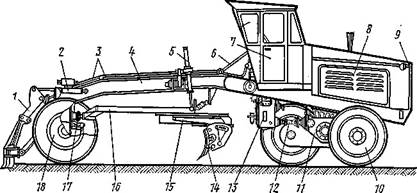
Рис. 8.11. Автогрейдер:
/ — рыхлитель; 2, 5
— гидроцилиндры; 3, 12 —
карданные валы; 4
— основная рама; б
— вал рулевого колеса; 7 — кабина; 8 —
двигатель; 9
— радиатор; 10 —
задний мост; // — сцепление; 13
— коробка перемены передач; 14
— отвал; 15 —
поворотный круг; 16
— рама поворотного круга; 17
— цапфа переднего моста; 18
—передний мост
Рабочие скорости автогрейдеров колеблются в пределах 1-2 м/с. В зависимости от веса отечественные автогрейдеры разделяют на пять типов:
Легкий Средний Тяж
елый
| Тип автогрейдера
|
I
|
II
|
III
|
IV
|
V
|
| Масса, т
|
7—9
|
10—12
|
13—15
|
17—19
|
21—23
|
Для среднего ремонта дорог и строительства дорог в грунтах до IV категории используются чаще средние автогрейдеры. Для значительных объемов дорожных работ, строительства аэродромов, планирования больших площадей, а также при работе в тяжелых грунтах выгоднее применять тяжелые автогрейдеры.
Автогрейдер (рис. 8.11) состоит из силовой установки, рамы, трансмиссии, рабочего органа, ходовой части и механизмов управления.
Основными рабочими органами автогрейдера являются отвал и кирковщик. В качестве дополнительных применяются откосники и снегоочистители.
Конструкция автогрейдера характеризуется схемой ходовой части, так как от нее зависят тяговое усилие автогрейдера, его планирующие свойства, устойчивость, а также маневренность. Чтобы обеспечить эти условия, ходовую часть делают с различным количеством колес и ведущих осей, с возможностью управления осями и наклоном колес.
Число осей А
с управляемыми колесами, число ведущих осей Б
и общее число осей В
характеризуют колесную схему автогрейдера, которая обозначается формулой А
x Б
х В.
Например, колесная формула автогрейдера, имеющего одну ось с управляемыми колесами и одну ведущую ось, следующая: 1x1x2. Наибольшее распространение имеют автогрейдеры, схема которых обозначается 1x2x3. Такие автогрейдеры отличаются большим сцепным весом, достигающим 75% от общего веса машины, и хорошей планирующей способностью.
В зависимости от выполняемой операции и положения рабочего органа при работе автогрейдера возникают силы сопротивления, аналогичные силам сопротивления при работе бульдозера.
Производительность автогрейдеров Псм при профилировании, нарезке канав и других работах определяется по объему срезаемого и перемещаемого грунта в смену, м3
/смену:
П
см
=Tk
и
V
/ tkр
,
(8.8)
где Т
— продолжительность смены, ч; k
и
— коэффициент использования времени в смену ( k
и
= 0,8¸0,95); V
— геометрический объем призмы грунта, перемещаемый за один рабочий ход, м3
; k
р — коэффициент разрыхления; t
— время рабочего цикла автогрейдера, ч.
Время рабочего цикла t
складывается из времени t1
— на перемещение грунта отвалом, t2
— на подъем отвала в транспортное положение, t3
— на переключение передач и повороты в конце рабочего хода, t4
— на обратный (порожний) ход, t5
— на переключение передач и поворот в конце обратного (порожнего) хода, t6
— на опускание отвала в рабочее положение.
Производительность в смену автогрейдеров при производстве планировочных работ
Псм
= 1000 (В - b)vk
и
/ t
м2
/ч,
где В
— ширина захвата (полосы планирования) отвалом, установленным перпендикулярно или под углом в плане к оси движения, м; b
— ширина перекрытия смежных полос планирования, м; v
— средняя скорость движения при планировании, км/ч; m
— необходимое число проходов по одному месту.
Грейдер-элеватор
(рис. 8.12) разрабатывает (срезает) грунт послойно и отсыпает его в отвал или в транспортные средства.
Принципиальной особенностью этой машины является то, что грунт, отделяемый от массива, попадает на транспортирующее устройство — конвейер, при помощи которого он подается в транспортные средства или в отвал. Это выгодно отличает грейдер-элеваторы от других землеройнотранспортных машин, так как расход энергии на транспортирование грунта конвейером значительно меньше, чем на заполнение грунтом скрепера и бульдозера, где в процессе перемещения грунта значительное количество энергии расходуется на трение грунта о грунт.
По типу рабочего органа грейдер-элеваторы разделяют на машины с дисковыми ножами, которые могут быть поворотными или неповоротными, с прямыми ножами и с криволинейными (струги).
По расположению конвейера грейдер-элеваторы разделяют на машины с поперечным или диагональным расположением конвейера, с одним или двумя поворотными конвейерами и машины с грунто-метателем.
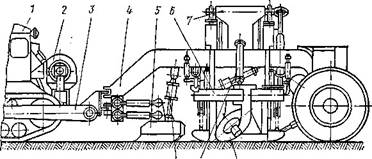
10 9 8
Рис. 8.12. Грейдер-элеватор:
/ — трактор-тягач; 2
— генератор; 3
— траверса; 4
— рама; 5
— планировщик; 6
— плужная балка; 7 — транспортер; 8
— дисковый нож; 9
— гидроцилиндр управления дисковым ножом; 10
— гидроцилиндр управления планировщиком
В зависимости от ходового оборудования и тягового средства грейдерэлеваторы могут быть прицепные (на пневматическом ходу), полуприцепные к гусеничным тракторам, навесные в виде сменного оборудования к автогрейдерам и самоходные (с собственной ходовой частью с использованием одноосных тягачей).
Грейдер-элеваторы применяют при строительстве дорог, постройке оросительных каналов, возведении дамб, валов, земляных плотин, разработке карьеров в равнинной местности и грунтов без значительных включений. При использовании транспорта с помощью таких машин устраивают высокие насыпи с выемкой грунта из боковых резервов или карьеров, разрабатывают глубокие и широкие выемки.
Наиболее эффективно используют грейдер-элеваторы при разработке связных грунтов. На сыпучих и сырых (с влажностью более 25%) грунтах производительность их невысокая.
Грунты I—III категорий грейдер-элеватор разрабатывает без предварительного рыхления, грунты IV категории должны предварительно разрыхляться. Мерзлые грунты, глубина промерзания которых больше 0,15 м, должны предварительно разрыхляться на всю глубину.
Скрепер
состоит из следующих основных частей: ходового оборудования (одноосного или двухосного), рабочего оборудования (ковша), механизмов управления ковшом и заслонкой. Приводят в движение скреперы одноосным или двухосным тягачом или собственными двигателями.
Скреперы подразделяют на прицепные, полуприцепные и самоходные. В соответствии с этим у прицепных и полуприцепных скреперов кроме перечисленных выше основных узлов имеется сцепное устройство, а у самоходных — и силовое оборудование (рис. 8.13).
Главным параметром скрепера является геометрическая емкость ковша q,
м3
; основными — грузоподъемность, ширина резания, глубина заглубления и удельная металлоемкость.
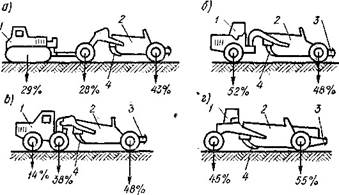
Рис. 8.13. Схемы скреперов (цифры показывают примерное распределение веса скрепера по осям):
а
— двухосный прицепной к гусеничному тягачу; б
, в
—- полуприцепные к одноосному и двухосному тягачу; г
— самоходный; / — тягач; 2
— ковш; 3
— буферное устройство; 4
— заслонка
По емкости ковша скреперы условно подразделяют на скреперы малой емкости с объемом ковша до 4 м3
, средней — 5¸12 м3
, большой — 8¸15 м3
. В последние годы начали применять скреперы с емкостью ковша до 60 м3
.
Грузоподъемность скрепера определяют по емкости ковша с «шапкой» q
ш при объемной массе разрыхленного грунта 1,5 т/м3
. Ширина резания В
для скреперов емкостью 4¸25м3
колеблется в пределах от 2200 до 2800 мм.
Максимальная глубина заглубления С
для этих же скреперов составляет 250¸400 мм, удельная металлоемкость 1¸1,2 т/м3
. Чем больше емкость ковша, тем меньше металлоемкость скрепера.
На рис. 8.14 показана схема самоходного двухмоторного скрепера.
Работает скрепер следующим образом. Подъехав к месту набора грунта, скреперист переключает тягач на первую передачу и одновременно опускает ковш, приподнимая заслонку. Ковш врезается в грунт под действием собственного веса, усилий гидроцилиндра (при гидравлическом управлении) и силы тяги трактора (прицепной скрепер) или силы тяги одного-трех толкачей (самоходный). Во время заполнения скреперист следит за наполнением ковша, регулируя толщину стружки в зависимости от загрузки двигателя. Обычно ковш быстро заглубляется на максимальную глубину, а затем постепенно поднимается, чтобы поддержать силу тяги на более или менее постоянном наиболее эффективном уровне. Путь заполнения в зависимости от емкости скрепера и крепости грунта при обеспечении необходимого тягового усилия колеблется в пределах от 8 до 35 м. Когда грунт перестает поступать в ковш вследствие того, что уменьшенная толщина стружки уже не в состоянии пробить массу грунта в ковше, скреперист начинает подъем ковша, закрывая заслонку, переводит управление на второй или третий диапазон скорости и направляется к месту разгрузки. У большинства скреперов разгрузка производится на ходу вперед. В зависимости от емкости скрепера толщина разгружаемого
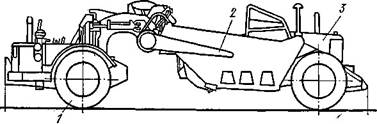
Рис. 8.14. Самоходный двухмоторный скрепер: 1— тягач; 2 — ковш; 3 — двигатель
слоя составляет 0,20¸0,60 м. Она регулируется опусканием или подъемом заслонки. Путь разгрузки достигает 15¸40 м.
Процесс работы скрепера происходит непрерывно. Только скреперы с задней разгрузкой останавливаются для разгрузки, если она производится под откос с насыпи.
При больших объемах работ скреперы работают группами по 10—30 машин, которые движутся по замкнутой линии, имеющей обычно в плане вид прямоугольника с закругленными углами.
Нижний предел целесообразной дальности возки для колесных тягачей составляет 150¸200 м. Так как на коротких расстояниях они не могут полностью использовать свою скорость, их следует использовать на работах небольшого объема при наличии прицепных скреперов и двухосных тягачей, не занятых на других работах.
Полуприцепные (самоходные) скреперы изготовляют емкостью 6¸45 м3
. При емкости 6¸10м3
их чаще применяют с одноосными тягачами мощностью 150—270 кВт и используют для работ небольших объемов, при расстояниях возки 150¸2500 м в условиях, требующих высокой маневренности (например, засыпка пазух шлюзов, небольших котлованов, отсыпка с головы невысоких насыпей и в сложных рельефных условиях).
При емкости 12¸45 м3
при хороших дорогах полуприцепные скреперы применяют с одноосными колесными тягачами мощностью 300¸1600 кВт. Реже, при дальности возки более 2,0 км, они используются с двухосными тягачами такой же мощности.
Максимальный подъем, преодолеваемый груженым полуприцепным скрепером на первой передаче колесного тягача, составляет 30—35%. Наиболее маневренными и быстроходными землеройно-транспортными машинами являются полуприцепные скреперы с одноосными тягачами. Однако их недостатком является то, что на ведущую ось тягача передается только 52¸55% веса груженой машины. Это значительно снижает их тяговые возможности и заставляет обычно прибегать при заполнении их к помощи 2— 3 толкачей, которыми могут служить

Рис. 8.15. Схемы заполнения ковша грунтом
двухосные тягачи, либо гусеничные тракторы со специальным буфером; снабженным демпферным устройством или в крайнем случае обычным отвалом бульдозера, упирающимся в буферное устройство скрепера. Еще меньше используется тяговое усилие у двухосных колесных тягачей. У них на ведущую ось передается 37—38% веса груженой машины.
Заполнение ковша за счет тягового усилия зависит от физикомеханических свойств грунта. В правильно сконструированном ковше заполнение его грунтом может быть разделено на три фазы (рис. 8.15).
Во всех грунтах в начальный период заполнения (I фаза, заслонка поднята на 0,5—0,7 м в зависимости от емкости ковша) ковш быстро заглубляется, а грунт движется к задней стенке ковша. После того как грунт дойдет до нее и начнет заполнять ковш, заслонка опускается почти до поверхности грунта, поступающего в ковш. В это время ковш заглубился на максимальную глубину и скреперист начинает медленно уменьшать толщину стружки, стараясь сохранить режим на пределе, за которым движение скрепера замедляется. В связных грунтах тем временем угол а
(рис. 8.15, а)
достигает 70—75°, и грунт начинает перемещаться вперед, заполняя заслонку и переднюю часть ковша (II фаза). После заполнения части заслонки грунт начинает пробиваться наверх (III фаза). Происходит как бы кипение, вспучивание грунта, заполняющего ковш. Призма волочения перед заслонкой в связных грунтах или почти вовсе отсутствует или очень невелика. Постепенно подъем грунта замедляется, а затем и вовсе прекращается. Это происходит потому, что уменьшившаяся толщина стружки уже не обладает силой, необходимой для преодоления возрастающей силы трения о грунт, заполнивший ковш. В этот момент скреперист

Рис. 8.16. Формы ножей
начинает быстрый подъем ковша с одновременным закрытием заслонки и переводит скорость на транспортный режим.
При малосвязных сыпучих грунтах (рис. 8.15, б)
процесс происходит почти так же, как в предыдущем случае, но угол а
имеет значительно меньшую величину, порядка 35—40°. Вследствие меньшего удельного сопротивления копанию в этих грунтах толщина стружки может быть значительно больше, иначе сила, проталкивающая грунт в ковш, будет недостаточна, весь грунт уйдет в призму волочения и валики по бокам ковша. Призма волочения перед заслонкой значительно больше, чем в связных грунтах.
Для уменьшения сил сопротивления загрузке заполнение ковша грунтом в некоторых конструкциях осуществляется элеваторным устройством (рис. 8.15, в).
Чтобы во время выглубления ковша стружка возможно дольше сохраняла толщину, необходимую для проталкивания грунта в ковш, и быстрее увеличивалась при заглублении, нож делают ступенчатым с выступающей вперед средней частью (рис. 8.16, а).
Помимо прямой (редко применяемой) и ступенчатой формы ножи бывают полукруглой формы (рис.
8.16, б).
Кроме основного ножа устанавливают съемные ножи, которые крепят к нижней части боковых стенок ковша. Они способствуют лучшему наполнению ковша в малосвязных грунтах.
Разгрузка ковша осуществляется тремя способами: свободным (рис. 8.17, а,
б), полупринудительным (рис. 8.17, в)
и принудительным (рис. 8.17, г).
При свободном способе разгрузки грунт может выгружаться вперед или назад. Для этого ковш поворачивается вокруг точки, лежащей вблизи центра тяжести ковша с грунтом. Этот способ пригоден для работы в сыпучих грунтах. Он обеспечивает достаточно точную регулировку толщины разгружаемого слоя. Таким способом можно осуществлять разгрузку под откос (при одноосном выполнении скрепера). Ковши со свободной разгрузкой применяются у скреперов очень малой емкости для вспомогательных работ.
При полупринудительном способе грунт Выгружается поворотом днища или задней стенки вместе с днищем относительно боковых стенок ковша и при этом частично выталкивается. Недостатком является хотя и лучшее, чем при свободной разгрузке, но все же неполное опорожнение ковша, особенно при липких и увлажненных грунтах.
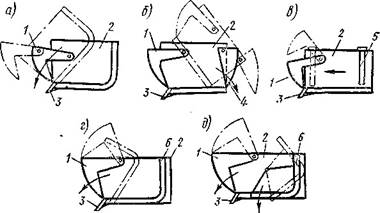
Рис. 8.17. Схемы разгрузки ковша:
а
— опрокидыванием ковша вперед; б
— то же, назад; в
— движением задней стенки ковша вперед; г
— опрокидыванием вперед блока днища; д
— поворотом днища и задней стенки ковша (щелевая); / — заслонка; 2
— ковш; 3
— нож; 4
— задняя стенка; 5
— подвижная задняя стенка; 6
— поворотные днища
При принудительном способе грунт выталкивается выдвижной стенкой, горизонтально перемещающейся на роликах в направляющих. Этот способ обеспечивает полную разгрузку любых грунтов. Недостатком являются большие усилия и мощности, необходимые для перемещения задней стенки.
В зависимости от выполняемой операции и положения скрепера на рабочий орган действуют следующие силы сопротивления: 1) сила сопротивления резанию грунта Р
р
(см. рис. 8.15, б); 2) сила трения ножа о грунт Р
тр1
; 3) сила сопротивления перемещению призмы волочения P
пр
; 4) сила сопротивления заполнению ковша Р
зап
. Она складывается из: силы сопротивления грунта подъему в ковше Р
под
и силы сопротивления трению между движущимся вверх столбом грунта и грунтом, находящимся в ковше,
Р
тр.
Суммарная сила сопротивления перемещению скрепера, кгс (Н)
Р
сум
= Р
р
+ Р
тр1
+ Р
пр
+ Р
зап
(8.9)
ЭКСКАВАТОРЫ
Экскаваторы предназначены для разработки горных пород и грунтов. Различают экскаваторы: одноковшовые, которые после отделения грунта от массива рабочим органом (ковшом) подают его на сравнительно небольшие расстояния в отвалы или в транспортные средства; многоковшовые роторные и цепные экскаваторы, у которых во взаимодействии с грунтом находятся всегда несколько ковшей. По характеру привода различают экскаваторы с механическим и гидравлическим приводом.
Одноковшовые экскаваторы с механическим (гибким) приводом
. В соответствии с назначением одноковшовые экскаваторы разделяются на следующие группы:
1) экскаваторы-краны для строительных и строительно-карьерных работ малой мощности с емкостью ковша 0,1—1,75 м3
; средней мощности с емкостью ковша 2—4 м3
; большой мощности с емкостью ковша 4,5—6 м3
;
2) экскаваторы карьерные средней и большой мощности с емкостью ковша
2—20 м3
, применяемые для разработки крепких пород с погрузкой в транспорт;
3) вскрышные экскаваторы-лопаты большой мощности с емкостью ковша 6—15 м3
, предназначенные для разработки крепких пород с погрузкой в отвал;
4) шагающие драглайны средней и большой мощности с емкостью ковша 4—100 м3
, которые используют для открытых горных работ и крупных гидротехнических сооружений, с погрузкой в отвал;
5) туннельные и шахтные лопаты и погрузчики с укороченным оборудованием с емкостью ковша 0,5—1 м3
;
6) башенные экскаваторы с емкостью ковша 0,5—10 м3
для разработки выемок и карьеров;
7) плавучие неполноповоротные лопаты с емкостью ковша 0,25— 20 м3
и грейферные экскаваторы на понтонах для дноуглубительных работ и сооружения каналов в тяжелых каменистых грунтах.
Строительные экскаваторы малой мощности наиболее универсальны. В зависимости от вида выполняемых работ они могут иметь следующее
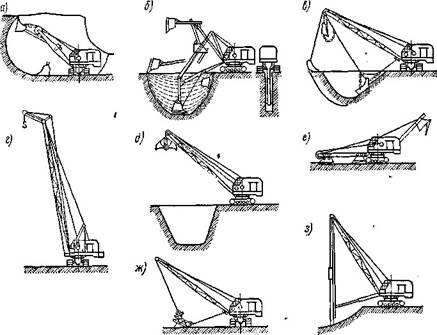
Рис. 8.18. Вилы сменного рабочего оборудования одноковшовых экскаваторов:
а
— прямая лопата; б — обратная лопата; в — драглайн; г
— кран; д
— грейфер; е
— струг; ж
— корчеватель; з — копер
оборудование (рис. 8.18): ковш — прямую лопату (обычно основную) для копания грунта выше уровня стоянки экскаватора; ковш — обратную лопату для копания грунта ниже уровня стоянки экскаватора, ковш драглайна для разработки выемок и сооружения насыпей, грейфер для рытья небольших котлованов и погрузочных работ; крановое оборудование; копер для забивки свай.
Для этих экскаваторов применяют и другие виды оборудования: трамбовки, ломы для разрушения покрытий и мерзлых грунтов, оборудование для бурения и т. д.
Экскаваторы со стандартным оборудованием прямой или обратной лопатой целесообразны при разработке (с погрузкой в транспорт) выемок и котлованов в тяжелых и скальных грунтах при возможности удобного отвода или отсутствия грунтовых вод. Очень тяжелые, мерзлые и скальные грунты нужно дробить взрывами так, чтобы средние размеры кусков не превышали
0,3—0,4 ширины ковша. Использовать одноковшовые экскаваторы в легких и средних грунтах целесообразно только тогда, когда нельзя применить скреперы и многоковшовые экскаваторы.
Экскаваторы с оборудованием драглайна применяют в основном для сооружения насыпей и выемок по бестранспортной схеме работы в отвал во всех грунтах, особенно при наличии грунтовых вод, кроме скальных.
Машины с ковшом емкостью более 3 м3
применяют в скальных грунтах.
Экскаваторы с оборудованием грейфера используют для разработки глубоких котлованов с отвесными стенками, особенно при
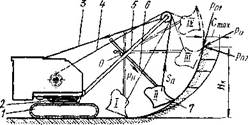
Рис. 8.19. Схема одноковшового экскаватора с прямой лопатой:
/ — ходовая часть; 2
— поворотная платформа; 3
— стреловой канат; 4
— подъемный канат; 5
— стрела; 6
— рукоять; 7 — ковш
наличии грунтовых вод, при работе под водой в любых грунтах, в том числе взорванных, и при перегрузочных работах.
Экскаваторы, имеющие два-три вида сменного оборудования (чаще всего прямая лопата, драглайн и кран), называются полууниверсальными.
Процесс работы экскаватора, оборудованного прямой лопатой, показан на рис. 8.19. Рукоять с ковшом 7 опускается к подошве забоя (положение /), затем перемещением рукояти вдоль оси осуществляют внедрение ковша в грунт, одновременно ковш поднимают подъемным канатом 4.
При этом рукоять поворачивается вокруг оси напорного вала (точка О). Толщину стружки С
выбирают таким образом, чтобы при выходе ковша из забоя он был наполнен «с шапкой» (положение ///). После наполнения ковша производят втягивание рукояти с ковшом, одновременно поворачивают платформу и выдвигают рукоять для установки над местом разгрузки.
Стрела шарнирно соединена с поворотной платформой. Во время работы положение стрелы не изменяется. Поднимают и опускают стрелу перед началом работы с помощью стрелоподъемного механизма и поли-спастного устройства. Канат полиспастного устройства стрелового каната проходит через блоки, закрепленные на конце стрелы и на двуногой стойке. Ковш вместе с рукоятью независимо от подъема стрелы поднимается с помощью главной лебедки, от барабана которой канат проходит через блоки, закрепленные на конце стрелы и на ковше. Этот канат называют подъемным.
Ковши могут быть глухими и с открывающимся днищем. В последнем случае экскаваторы имеют механизм, который позволяет открывать днище ковша при его разгрузке. Этот механизм состоит из лебедки, каната и рычажной системы на рукояти ковша.
Таким образом, цикл работы экскаватора с любым оборудованием состоит из следующих операций: 1) рабочего хода — наполнения ковша грунтом с помощью подъемного и напорного или тягового механизма, перемещения ковша к месту выгрузки и выгрузки грунта; 2) холостого хода — перемещения пустого ковша от места выгрузки грунта обратно к месту копания; 3) перемещения экскаватора на новую позицию.
Элементы цикла работы экскаватора рассмотрим более подробно на примере работы прямой лопаты.
Наполнение ковша является основной операцией, определяющей производительность экскаватора. При подъеме под напором ковш внедряется в грунт, срезая слой грунта (стружку). В малосвязных, сыпучих и разрыхленных грунтах ковш захватывает грунт не стружкой, а порциями и кусками.
Объем грунта в заполненном ковше зависит от сечения срезаемой стружки и длины, на которой она срезается. Проекция этой длины на вертикаль называется высотой копания Н
к
.
Так как форма траектории в процессе последовательных резов не меняется, то длину горизонтального сечения стружки можно приближенно принять постоянной по всей высоте копания. Толщина снимаемой стружки в направлении напора переменна и достигает максимального значения С
mах
на высоте напорного вала. Приближенно объем грунта в ковше (м3
)
q, = bC
max
H
k
k
p
k
н
(8.11)
где b
— ширина срезаемой стружки (обычно ширина ковша), м; kp
— коэффициент разрыхления (k
p
»1,1¸1,3); k
н
— коэффициент наполнения ковша; для экскаваторов величина его может достигать 1¸1,2.
Следовательно, максимальное сечение стружки (м), необходимое для заполнения ковша при k
н =
1, составит:
Cmax
= q / b Hk
kp
(8.12)
Продолжительность копания составляет примерно 30—35% от общего времени цикла. Чтобы не увеличивать продолжительность цикла, ковш перемещают на выгрузку при повороте. Для этого требуется согласовать скорости и ускорения всех движений ковша при минимальных углах поворота (порядка 40°). Продолжительность выгрузки в зависимости от вязкости грунта, емкости ковша, а также места выгрузки грунта составляет
1—8 с. Открывание ковша для выгрузки должно совмещаться по времени с поворотом ковша. Емкость кузова должна быть не менее 4—5 емкостей ковша при автотракторном транспорте и 8—10 емкостей ковша при железнодорожном.
После выработки участка забоя экскаватор перемещается для разработки нового. Поскольку выдвижение рукояти на полный вылет уменьшает возможное усилие копания, разработку каждого участка забоя ведут таким образом, чтобы последняя стружка срезалась при рукояти, выдвинутой не больше чем на 60—80% от ее общего хода (меньше в более тяжелых грунтах), который у строительных экскаваторов колеблется от 2 до 5 м. Величина передвижки экскаватора для разработки каждого элемента забоя 1,2¸4 м. Продолжительность передвижки составляет 15¸40 с. Ее приходится увеличивать на слабых грунтах, а также при плохой планировке пути перед экскаватором. Поэтому необходимо обеспечивать хорошую планировку пути, для чего нужна правильная разработка забоя самим экскаватором.
Кинематическая схема экскаватора следующая: цепь управления рабочим оборудованием, в которую входят механизм подъема ковша или тяговый механизм (для драглайна), механизм внедрения ковша в грунт (напорный механизм), механизмы перемещения ковша к месту выгрузки и обратно в забой, механизм, способствующий выгрузке (открывание днища ковша); цепи управления перемещением машины.
В зависимости от вида привода экскаваторы делятся на два типа: одномоторные (дизельные, электрические или дизель-электрические) и многомоторные (дизель-электрические, дизель-гидравлические).
На рис. 8.20, а
изображена одна из простых схем — кинематическая схема экскаватора с прямой лопатой и одномоторным приводом. Кинематическая цепь привода главной лебедки подъема ковша состоит из зубчатого редуктора 2,
приводимого в движение двигателем /, и зубчатой передачи 3.
Барабан 4
лебедки, свободно посаженный на валу, приводится во вращение фрикционной муфтой 5.
На барабане установлен тормоз 6.
На этом же валу размещен свободно возвратный барабан 7, на который наматывается канат от барабана механизма напора. Барабан 7 приводится во вращение фрикционной муфтой 5
и затормаживается тормозом 6,
так же как барабан 4.
На том же валу закреплена коническая муфта 8
привода механизма открывания днища ковша.
Кинематическая цепь механизма поворота платформы состоит из редуктора 2,
конической передачи 9,
зубчатой передачи 10
и зубчатого колеса // (последнее приводит в движение зубчатый венец 12
поворотной платформы). Реверсирование поворота осуществляют при помощи двух ленточных фрикционов 13;
включением одной из лент платформа поворачивается вправо или влево.
Кинематическая цепь механизма передвижения машины состоит из редуктора 2,
конических передач 9
и 15,
зубчатых передач 10
и 14.
Одна из шестерен конической передачи 15
приводит во вращение вал со звездочками 16.
Каждая из них передает движение звездочкам 17,
которые в свою очередь приводят в движение одну из ведущих звездочек привода гусеницы.
Поворачивают машину включением одной из звездочек 16
при помощи кулачков 18.
Реверсирование хода достигается включением одного из двух ленточных фрикционов 13.
Кинематическая цепь механизма подъема и опускания стрелы состоит из редуктора 2,
конической передачи 9,
зубчатой передачи 19,
червячной передачи 20
и ленточного тормоза 21.
Напорные механизмы в экскаваторах выполняются по различным схемам зависимого, независимого и комбинированного напора.
При зависимом напоре (рис. 8.20,6) напорное движение осуществляется в результате натяжения подъемного каната лебедкой 4
при оттормаживании возвратного барабана 7. Подъемный канат, закрепленный
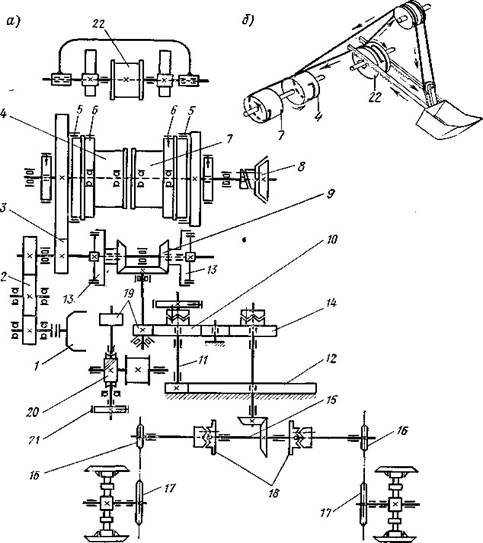
Рис. 8.20. Кинематическая схема одноковшового экскаватора с одномоторным приводом
одним концом на барабане механизма напора 22,
сматывается с барабана и поэтому скорость подъема ковша несколько уменьшается. Исходя из этого, скорость подъемного каната при зависимом напоре принимают на 10—15% выше необходимой.
Для возврата рукояти включают муфту возвратного барабана.
При копании на ковш действует суммарная сила копания Р0
(рис. 8.21,
а).
Она является результирующей касательной силы копания Р01
= k1
F
(где F
—- площадь сечения срезаемого грунта, F
= СВ,
где С —
толщина снимаемого слоя; В
— ширина ковша) и нормальной силы копания Р02
.
Величина Р02
в значительной степени зависит от площади затупления зубьев и режущей кромки и обычно принимается равной (02¸0,4) Р01
.
В системе силового оборудования действуют подъемная сила ковша S„,
сила подъема стрелы Q
и сила напора на рукояти Р
н.
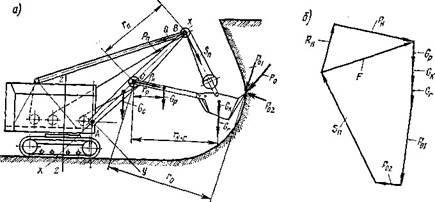
Рис. 8.21. Схема для определения сил в рабочем оборудовании: а
— схема для определения подъемной силы ковша; б
— многоугольник для определения напорного усилия
Величину силы S
п можно определить из уравнения моментов относительно оси напорного вала (рис. 8.21), принимая, что линия действия Р02
проходит через его ось:
S
п
= 1 /r
п
*
(Р
01
r
0
+ G
к + г
r
к
+
г
+ G
p
r
p
),
(8.13)
где G
p
— вес рукояти; G
к+r
— вес ковша с грунтом.
Таким образом, по известным параметрам ковша и рабочего оборудования, толщине стружки С
и категории грунта можно определить величину S
п
.
Задаваясь скоростью подъема v
п
,
определяют мощность подъемного механизма:
N
п
= S
п
v
п
/ 102
hп
(8.14)
где hп
— КПД механизма подъема.
Экскаваторы с гидравлическим приводом.
Схема одноковшового экскаватора, оборудованного прямой лопатой с гидроприводом, показана на рис. 8.22. На конце стрелы / имеется ось 2,
на которую навешена рукоять 3.
К рукояти жестко прикреплен ковш 4.
Подъем и опускание стрелы осуществляются гидроцилиндром 5,
а поворот рукояти вокруг оси — гидроцилиндром 6.
Днище ковша открывается и закрывается гидроцилиндром 7.
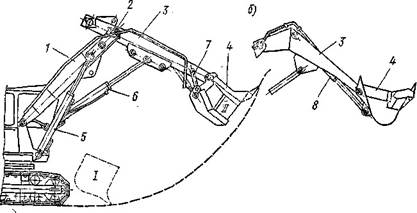
Рис. 8.22. Экскаватор, оборудованный прямой лопатой с гидравлическим приводом
Процесс работы осуществляется следующим образом. Втягивая шток гидроцилиндра 5
(рис. 8.22, а),
поворачивают стрелу по часовой стрелке. Одновременно, втягивая шток гидроцилиндра 6,
опускают рукоять так, чтобы ковш занял положение /для копания. Заглубление ковша и регулирование толщины стружки производят подъемом или опусканием стрелы с помощью гидроцилиндра 5.
Выдвижением штока гидроцилиндра 6
поворачивают рукоять и наполняют ковш (положение //). После наполнения ковша поднимают стрелу и выводят его из забоя. Для подъема ковша на большую высоту, кроме подъема стрелы, поворачивают еще и рукоять. Для разгрузки ковша открывают гидроцилиндром 7 его днище.
Ряд экскаваторов с гидроприводом выпускается с ковшами, которые закреплены на рукояти таким образом, что ковши могут поворачиваться (рис. 8.22, б).
Поворот ковша осуществляется гидроцилиндром 8.
Поворот ковша прямой лопаты позволяет выполнять не только разработку и погрузку, а также вести планировку забоя
Одноковшовые экскаваторы с оборудованием обратной лопаты.
Экскаваторы с обратной лопатой преимущественно оборудуются гидравлическим приводом. Поэтому ниже приводится оборудование обратной лопаты только с гидравлическим приводом.
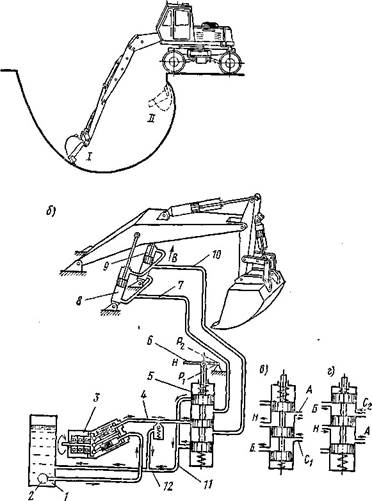
Рис. 8.23. Экскаватор, оборудованный обратной лопатой с гидравлическим приводом
Во время работы экскаватора, оборудованного обратной лопатой, ковш движется снизу вверх не «от себя», как в прямой лопате, а к себе. Ковш устанавливается в положение / (рис. 8.23, а).
Гидроцилиндр поворота ковша находится в крайнем положении, шток до упора втянут в цилиндр, положение гидроцилиндров стрелы и рукояти таково, что позволяет режущей кромке ковша занять требуемое исходное положение. При этом относительное положение штоков и цилиндров рукояти и стрелы должно обеспечивать дальнейшее рабочее движение ковша при наборе грунта.
Далее ковш с помощью гидроцилиндра рукояти внедряется в грунт, а затем через некоторое время включается гидроцилиндр поворота ковша. При этом продолжается внедрение ковша за счет движения цилиндра стрелы. По достижении максимального сечения стружки движение штока рукояти прекращается, а ковш продолжает поворачиваться до полного его заполнения (положение //). Цилиндр поворота стрелы начинает работать после того, как ковш заполнится на 50%.
После окончания поворота ковша и его выглубления из забоя включается механизм поворота платформы. При этом подъем стрелы и ковша продолжается. После поворота платформы для установки ковша над местом разгрузки или транспортным средством ковш поворачивается для разгрузки, принимая в конце исходное положение (///). Платформа возвращается в исходное положение. Стрела и рукоять также устанавливаются в исходное положение, и цикл повторяется.
Значительным достоинством гидравлического привода является возможность независимо управлять работой отдельных узлов силового оборудования.
Пример схемы привода стрелы (подъема и опускания) показан на рис. 8.23, б.
Масло из бака /, в котором помещен фильтр 2,
подается насосом 3
в трубопровод 4 и к
распределительному устройству 5. Перемещением золотника вверх рукояткой 6
устанавливают золотник так, как показано на рис. 8.23, е.
Масло при этом положении золотника поступает через отверстия Я и Л и трубопровод 7 в нижние полости гидроцилиндров 8.
Штоки гидроцилиндров при этом перемещаются по стрелке В,
поднимая стрелу. Масло из верхней полости через трубопроводы 9
и отверстия в распределительном устройстве С
г
и Б
и трубопровод 10
сливается в бак /. Для опускания стрелы рычагом 6
перемещают золотник вниз и устанавливают его так, как это показано на рис. 8.23, г.
При этом масло через отверстия Я и Л и трубопровод // подается в верхние полости цилиндров 9,
а из нижних полостей этих цилиндров масло сливается в бак / через трубопровод 7, отверстия в золотниковом распределителе и трубопровод //. В гидросистеме установлен предохранительный клапан 12.
Если золотник находится в нейтральном положении (рис. 8.23, а)
и перекрывает доступ масла в гидроцилиндр или если в системе нагнетания давление повышается выше расчетного, то масло, подаваемое насосом, пропускается через этот клапан обратно в бак /.
Экскаваторы, оборудованные драглайном.
Для разработки грунта на больших глубинах и при большом радиусе действия применяют экскаваторы, оборудованные драглайном. В отличие от прямой и обратной лопат ковш драглайна не укрепляется жестко на рабочем оборудовании, а подвешивается на двух канатах: подъемном и тяговом (рис. 8.24, а)
при помощи блоков, цепей подвески и разгружающего каната.
Радиус действия увеличивается в результате отсутствия жесткой связи ковша со стрелой, уменьшающей нагрузки стрелы. Это позволяет установить на экскаваторе стрелу (обычно решетчатую) в 2—2,5 раза длиннее, чем при оборудовании лопатой. Ковш драглайна для копания и разгрузки может выбрасываться вперед на несколько метров.
Перед началом работы ковш находится в положении /. В это время лебедка тягового каната расторможена и ковш висит на подъемном канате. Точка подвески ковша на подъемном канате расположена ближе к задней стенке, чем центр тяжести пустого ковша, поэтому
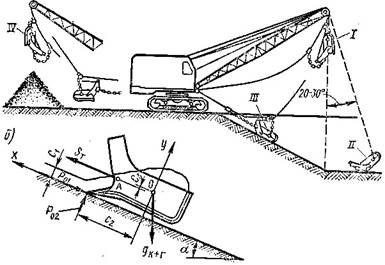
Рис. 8.24. Экскаватор, оборудованный драглайном: а
— схема работы; б
— силы, действующие при работе ковша драглайна
ковш висит зубьями или режущей кромкой вниз. Оттормаживая лебедку подъема, опускают ковш и он врезается в грунт (положение //). При включении тяговой лебедки ковш ложится на грунт и начинает перемещаться, разрушая грунт и заполняясь им (положение ///). В это время лебедка подъемного каната либо расторможена, либо слегка поддерживает ковш, чтобы избежать слишком резкого заглубления. После наполнения ковша, не останавливая тяги, включают лебедку подъема. Подъемный канат, втягиваясь, натягивает разгрузочный канат и ковш отделяется от грунта приподнятой передней частью.
Во время перемещения ковша к месту разгрузки его передняя часть должна оставаться приподнятой, чтобы грунт не высыпался. Это обеспечивается легким натяжением тягового каната. Когда ковш достигает места разгрузки, растормаживают лебедку тягового каната и ослабляют тяговый и разгружающий канаты. В результате ковш поворачивается зубьями вниз и разгружается (положение IV).
В процессе копания возникают следующие сопротивления (рис. 8.24, б).
Касательная сила копания, кгс (Н),
Р
01
=k
1
bc
где k1
— коэффициент копания, кгс/см2
(Н/м2
); с
— средняя толщина стружки, см (мм); b
— ширина ковша, см (мм).
Нормальная сила копания Р0
, принимается обычно равной (0,2¸0,3) Р01
.
При анализе работы ковшей драглайна важно знать величину Р02
, которой определяется способность ковша срезать стружку не выглубляясь. Ковш внедряется вначале только под действием собственного веса g
k,
а затем и веса грунта в ковше g
r.
Величина этого сопротивления в начале копания
Р02
£ g
k
cos a,
(8.16)
где а
— угол откоса, град.
Объем срезаемой стружки в плотной теле
q
c
= Lx
bc,
(8.17)
где Lx
— рабочий ход ковша, принимаемый равным для легких грунтов (2¸3) lk
,
для средних (3¸4) lk
, для тяжелых (4¸6) lk
, lk
—длина ковша.
Под действием тянущего усилия S
т
возникает момент М
0
= G
г
C
з
,
стремящийся опрокинуть ковш (рис. 8.24). Устойчивость ковша зависит от категории разрушаемого грунта, угла откоса а,
веса ковша с грунтом, расстояния С1
от центра тяжести до режущей кромки, расстояния С3
между точкой крепления тянущего каната А
и центром тяжести ковша с грунтом О.
Чем меньше величина С3
,
тем больше устойчивость ковша. Чем больше расстояние С2
от центра тяжести до режущей кромки, тем устойчивость больше.
Р а б о ч и е о р г а н ы э к с к а в а т о р о в .
Основным рабочим органом одноковшового экскаватора является ковш. В зависимости от назначения и вида оборудования ковши имеют различную конструкцию.
Ковш прямой лопаты
(рис. 8.25, а)
имеет форму, близкую к параллелепипеду, с открытой верхней плоскостью и открывающимся днищем. Ковши могут быть литыми из стали, сварной конструкции или комбинированной; иногда их делают клепаными. Литые ковши на 30—35% тяжелее сварных при том же объеме. Для уменьшения износа переднюю стенку ковша делают из износоустойчивой стали. Эта стенка имеет козырек с гнездами для крепления зубьев или со сплошной режущей кромкой. К задней стенке приваривают проушины для соединения ковша с рукоятью, крепления днища и блока подъема ковша.
Ковши обратной лопаты
(рис. 8.25, б)
выполняют без открывающегося днища. Для крепления ковша и рукояти к нему также приваривают проушины. Корпус такого ковша обычно выполняют сварным,
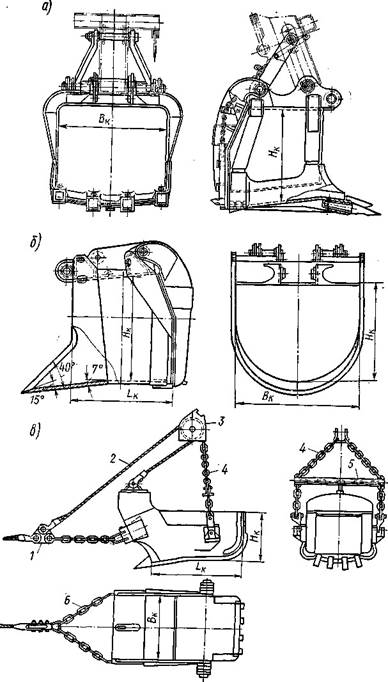
Рис. 8.25. Ковши экскаваторов
а козырек — литым, с гнездами для зубьев или со сплошной режущей кромкой. Кроме зубьев на козырьке ковш обратной лопаты иногда имеет их на боковых стенках для подрезания стенок траншей.
Ковш драглайна
(рис. 8.25, б) имеет форму совка — он открыт спереди и сверху. В комплект ковша входит упряжь, состоящая из тяговых цепей 6,
подвесных цепей 4,
распорного коромысла 5,
разгрузочного каната 2,
опрокидного блока 3
и соединительного звена /.

Рис. 8.26. Конструкции зубьев
Ковши драглайнов выполняют как с зубьями, так и со сплошной режущей кромкой. К боковым стенкам ковша приваривают проушины для подвески его к подъемным цепям, а впереди, в верхней части ковша, — проушина для крепления разгрузочного каната.
На процесс копания значительное влияние оказывает форма режущей кромки ковша. До последнего времени у большинства ковшей режущая кромка дополнительно снабжалась сменными зубьями,которые крепятся в гнездах передней стенки или козырька, прикрепленного к передней стенке.
На рис. 8.26 показаны различные конструкции зубьев и способы их крепления К ковшу. Длину зубьев выбирают так, чтобы грунт не высыпался между передней кромкой ковша и забоем. Расстояние между зубьями не должно превышать 40—50% от толщины стружки.
Многоковшовые экскаваторы.
По типу рабочего органа они подразделяются на роторные и цепные. Принципиальная особенность этих машин заключается в непрерывности действия. Эти машины менее универсальны, чем одноковшовые экскаваторы, вследствие чего их широко применяют для выполнения однотипных работ большого объема, к которым относятся траншеекопатели и карьерные.
Многоковшовые экскаваторы можно классифицировать также по характеру движения рабочего органа: 1) на экскаваторы продольного копания (цепные и роторные), у которых направление перемещения машины и направление рабочего движения одинаковы; 2) экскаваторы поперечного копания (только цепные), у которых направление перемещения машины перпендикулярно направлению рабочего движения; 3) экскаваторы карьерные роторные, у которых рабочий орган кроме вращения вокруг своей оси поворачивается относительно оси машины.
Ц е п н ы е т р а н ш е е к о п а т е л и
могут разрабатывать траншеи большей глубины, чем роторные, и при равной глубине копания имеют меньшую массу. Поэтому их применяют чаще, несмотря на то что при одинаковой с роторными траншеекопателями массе имеют меньшую производительность. Малые модели цепных траншеекопателей, как и роторных, часто изготовляют в виде навесного оборудования на тракторах, тягачах и автомобилях.
Рабочее оборудование такого экскаватора состоит из ковшовой рамы, по которой движется бесконечная цепь с укрепленными на ней ковшами. Поднимается и опускается рама при помощи канатного, гидравлического или цепного привода. Ковшовая цепь приводится в движение при одномоторном приводе через редуктор и цепную передачу от двигателя. На современных экскаваторах часто применяется многомоторный привод и гидродинамическая передача с гидротрансформатором.
Рабочий орган траншеекопателя представляет собой широкий и короткий ковш. При очень малой ширине траншеи (0,3—0,5 м) применяют полуковши или скребки. Разгрузка ковша при огибании верхней звездочки ковшовой цепи производится принудительно. Для этого на ковшовой раме устанавливают подпружиненные скребки, вычищающие ковш при огибании звездочки.
Для изменения ширины траншеи на ковшах крепят боковые ножиуширители, применяют специальные фрезы на ковшовой раме, а также ковши разной ширины. Для широких траншей ковши устанавливают
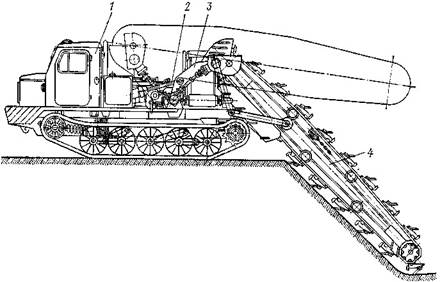
Рис. 8.27. Цепной траншеекопатель:
/ — транспортно-силовая установка; 2
— вал привода транспортера; 3
— то же, рабочего органа; 4
— рабочий орган
в два ряда и размещают их в шахматном порядке для большей равномерности работы. Для обработки каналов с откосами в легких грунтах используют дополнительно боковые шнеки и ножи. Ковши снабжают зубьями, иногда устанавливаемыми в шахматном порядке.
На рис. 8.27 приводится общий вид одного из последних типов цепных траншеекопателей. Он предназначен для рытья траншей глубиной до 2,5 м в незамороженных грунтах I—III
категорий. В конструкции машины предусмотрена возможность оборудования ее дополнительной вставкой, позволяющей рыть траншеи глубиной до 3,5 м.
Привод транспортной установки позволяет осуществить бесступенчатое регулирование в диапазоне передвижения 5¸150 км/ч. Это дает возможность на малых скоростях передвижения разрабатывать мерзлые грунты.
При работе ковшовая цепь приводится в движение, а стрела постепенно опускается. Ковши врезаются в грунт на заданную глубину копания, после чего включается ходовой механизм и копание траншей осуществляется рабочим перемещением машины. Грунт с ковшей, разгружающихся при огибании ими приводной звездочки, падает на поперечный конвейер. Скорость конвейера 2—2,5 м/с, длина 2—4 м. Конвейер может сдвигаться вправо или влево так, что обеспечивается разгрузка с нужной стороны траншеи.
Основными параметрами экскаваторов являются скорость движения ковшей v
ц
(скорость копания) и скорость перемещения машины v
х
.
При любой глубине траншеи Н
скорость ковшовой цепи и скорость хода должны обеспечивать наполнение ковшей. При врезании в грунт толщина стружки быстро возрастает до постоянного значения, сохраняемого по всей траектории ковша в забое. Если принять, что объем стружки в рыхлом теле qc
должен равняться фактической емкости ковша q
с учетом коэффициента наполнения kн
,
то
q
с
= qkн
= Hbckр
,
(8.19)
где q
— емкость ковша, м3
; с
— толщина стружки, мм; b
— ширина ковша, мм.
Р о т о р н ы е т р а н ш е е к о п а т е л и
отличаются от цепных более высокими КПД, производительностью и меньшими размерами траншеи, разрабатываемой ими. Поскольку наибольшая глубина траншеи у них не превышает 0,6 диаметра ротора, то уже при глубине траншеи порядка 3,5 м необходим ротор диаметром около 6 м. Ротор таких размеров затрудняет транспортировку, а поэтому роторные траншеекопатели редко применяются для траншей глубже 2,5 м.
В качестве базовой машины для них используют тракторы или тягачи, обычно на гусеничном ходу. Конструктивная схема такого экскаватора показана на рис. 8.28. Рабочее оборудование состоит из ротора,

Рис. 8.28. Роторный траншеекопатель:
/ — двигатель; 2
— коробка передач; 3
— передача привода ходовой части; 4
— привод ротора; 5
— привод конвейера; 6
— конвейер; 7 — ротор
несущего 10—16 ковшей. Ротор представляет собой обод, катящийся по роликам четырехугольной или треугольной рамы, который приводится во вращение шестерней механизма привода, установленной на раме и сцепляющейся с венцовой шестерней обода. Рама снабжена кожухом, препятствующим высыпанию грунта из ковшей. На ободе закрепляется от 10 до 14 ковшей. Поднимается и опускается ротор с помощью цепных, гидравлических или канатных устройств.
Рабочим органом является ковш, снабженный зубьями. Для крепких грунтов зубья имеют большую длину и выполняются в виде клыков, устанавливаемых в шахматном порядке, чтобы увеличить объем скола. Очищающие скребки в роторных траншеекопателях не устанавливаются изза жесткого крепления ковшей к ободу, что затрудняет использование экскаваторов в вязких грунтах. Для лучшей разгрузки таких грунтов задние стенки ковшей изготовляют из цепей круглого железа. Для ушнрения траншеи на колесе устанавливают два ряда ковшей или применяют уширители. Для обработки канав с откосами в легких грунтах используют специальные ножи.
Эти экскаваторы выпускаются с одномоторным дизельным и с многомоторным дизель-электрическим приводом. В дизель-электрическом приводе (рис. 8.29) дизель приводит в движение генератор, ток от которого передается к электродвигателям приводов ротора, ходовой части и гидронасоса.
Процесс работы проходит следующим образом. Ротор приводится в движение и постепенно опускается до заглубления на заданную глубину копания. После этого включается ходовой механизм и машина перемещается вдоль разрабатываемой траншеи. Грунт из ковшей высыпается на ленточный конвейер и подается на бровку забоя.
Скорость ковшей колеблется от 1,5 до 2,5 м/с. Скорость перемещения машины (рабочий ход) составляет 20—600 м/ч. Каждый ковш движется вокруг оси колеса и одновременно поступательно, поэтому сечение стружки изменяется и достигает максимального значения на высоте копания, равной радиусу колеса.
Це пные э к с к а в а т о р ы п о п е р е ч н о г о к о п а н и я
широко применяют на карьерах нерудных материалов как для вскрышных работ, так и для добычи глины, гравия, песка. Эти машины делят на экскаваторы нижнего и верхнего копания. Экскаваторы нижнего копания разрабатывают забой, расположенный ниже уровня установки машины (рис. 8.30, б, г),
а экскаваторы верхнего копания — выше уровня установки машины (рис. 8.30, а, в).
При втором способе разработки энергоемкость процесса меньшая, чем при первом, так как грунт не приходится поднимать вверх.
Современные экскаваторы можно переоборудовать для верхнего или нижнего копания.
На карьерах для добычи нерудных материалов применяют экскаваторы сравнительно малой мощности, до 50 кВт. Емкость ковшей этих машин составляет 20¸50 л (дм3
), глубина или высота копания— 6¸9 м, скорость передвижения экскаватора — 4¸12 м/мин на железнодорожном ходу и 4¸6 м/мин на гусеничном.
Различают два вида копания при работе этими экскаваторами: параллельное и радиальное (веерное). При параллельном копании по всей длине забоя снимается стружка одинаковой толщины. В этом случае ковшовая рама расположена параллельно поверхности забоя и каждый ковш снимает стружку одинаковой толщины.
При радиальном резании рама находится под углом к поверхности забоя. Толщина снимаемой стружки в этом случае различна: у конца ковшовой рамы она имеет максимальное значение, у выхода ковшей из забоя — минимальное. Когда ковшовая цепь приводится в движение, рама постепенно опускается в забой до тех пор, пока ковш не заглубится в грунт на заданную глубину копания. После этого включают ходовой механизм и экскаватор начинает перемещаться вдоль забоя.
Для того чтобы при радиальном копании на поверхности забоя не оставалось несрезанных полос, каждый последующий ковш должен срезать полосу, примыкающую или немного перекрывающую полосу, срезанную предыдущим ковшом. Для этого скорость перемещения и скорость цепи при заданном шаге ковшей должны быть увязаны с шириной ковша.
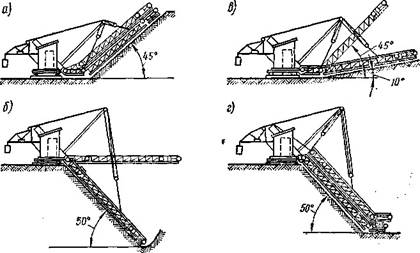
Рис. 8.30. Схемы работы экскаватора при поперечном копании:
а
_ верхнее копание при параллельном резании; б — нижнее копание при параллельном резании; в
— верхнее копание при радиальном (веерном) резании; г —
нижнее копание при радиальном (веерном) резании
Р о т о р н ы е к а р ь е р н ы е э к с к а в а т о р ы
(рис. 8.31) устанавливают на гусеничном ходу. Роторные экскаваторы, выпускаемые в настоящее время, имеют диаметр роторного колеса 1,6—16,5 м и емкость ковшей 16¸4000л. Теоретическая или конструктивная производительность их 80—8000 м3
/ч, высота разрабатываемого забоя 5—70 м, мощность привода ~ 30—1500 кВт. На предприятиях нерудных материалов применяют роторные экскаваторы малой мощности с емкостью ковша 25—150 л, а на крупных карьерах — модели средней мощности с емкостью ковша 200—500
л. Установленная мощность на каждый литр емкости ковша при разработке тяжелых грунтов составляет 1,5—2 кВт, средняя производительность на 1 л емкости ковша 1,5—2,5м3
/ч.
Энергоемкость разработки грунта колеблется от 0,ЗкВт*ч/м3
в легких грунтах до 0,5 — в средних и до 0,75 — в тяжелых грунтах.
Рис. 8.31. Конструктивная схема роторного экскаватора:
/ — ротор с ковшами; 2
— стрела; 3
— приемный ленточный транспортер; 4
— поворотная платформа; 5
— канаты подъема роторной стрелы; 6
— ленточный транспортер; 7
— гусеничный ход
Роторные экскаваторы выпускают с выдвигаемой и невыдвигаемой телескопической стрелой.
Рабочими органами роторных экскаваторов служат ковши с различными формами режущих кромок. Ковши расположены равномерно по окружности ротора. Ковши роторных экскаваторов могут быть с зубьями и без них.
Для разработки липких материалов днища ковшей делают не сплошными, а состоящими из цепей. В процессе работы экскаватор подводят к забою при вращающемся роторе. Ковш ротора врезается в породу на глубину, соответствующую толщине снимаемой стружки в положении, когда режущая кромка ковша находится в плоскости, проходящей через ось ротора. Затем поворотная рама вместе с вращающимся ротором поворачивается на угол 90—120°. После снятия стружки по всей дуге экскаватор снова перемещают на величину, необходимую для получения заданной толщины стружки. Цикл работы повторяется до тех пор, пока не будет разработана ступень на глубину А,
равную 0,5—0,7 длины роторной стрелы.
При достижении очередным ковшом верхнего положения грунт из него высыпается на приемный транспортер. С этого транспортера грунт перегружается на другой ленточный транспортер, который подает его в отвал или транспортные средства.
Производительность роторных экскаваторов зависит, как и у одноковшовых, от числа разгрузок (ссыпок) пр
в 1 мин. При заданной скорости ковшей vк
и шаге их Тк
число разгрузок будет равно:
пр
= 60vк
/ Тк
.
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ГИДРОМЕХАНИЗАЦИИ
Для целей строительства часто применяется способ разрушения и транспортирования грунтов при помощи струи воды, подаваемой под давлением. Этот способ называется гидромеханизацией. Гидромеханизация осуществляется обычно двумя видами устройств: 1) гидромониторами, выбрасывающими струю воды под высоким давлением и скоростью, которая разрушает грунт; 2) землесосами или земснарядами, которые разрушают грунт под водой механическими средствами, а затем всасывают смесь размельченного грунта с водой (пульпу) и транспортируют ее в отвал или к месту укладки.
Примерные технико-экономические показатели при применении гидромониторов и плавучих земснарядов составляют соответственно: годовая выработка установки 0,1—1 млн. м3
и 0,8—3,0 млн. м3
, годовая выработка на одного рабочего 3,5—15 и 15—50 тыс. м3
, расход энергии 3,5— 6 и 1,9—2,2 кВт*ч/м3
, металлоемкость (с трубопроводами) на 1 млн. годовой программы 70—250 и 270—500 т.
При комбинированной разработке с механическим рыхлением грунта вместо гидромониторов с гидротранспортом расход энергии меньше в 1,5—2 раза, производительность труда выше на 25—50%.
Гидромонитор (рис. 8.32) состоит из гидравлического насоса, трубопроводов, подающих воду к насосу, и собственно гидромонитора. Установка выполнена из нескольких колен, на одном из которых установлена труба и коническая насадка.
Насосы подбирают по заданной производительности. Если нет насосов нужной производительности, то устанавливают несколько насосов.
Мощность, необходимая для привода насосов,
N
н
= ПН
к
/ 367
h (8.24)
где Н
к
— напор, развиваемый насосом, м вод. ст.; h — КПД насоса, равный 0,7—0,75.
Размытый гидромониторами грунт может транспортироваться к месту укладки по канавам или лоткам с определенным уклоном (табл. 8.2).
/ — пульт управления; 2
— салазки; о
— гидроцилиндры; 4
— нижнее колено; 5
— шарнир дли поворота гидромонитора в горизонтальной плоскости; 6
— верхнее колено; 7 — рычаг для ручного управления тдромонитора; 8
— противовес; 9
— шарнир для вращения ствола в вертикальной плоскости; 10
— ствол; // — насадка
Применяется также напорный гидротранспорт, требующий расхода энергии на перекачивание 1 м3
грунта на 100 м ~ 0,4 кВт*ч/м3
.
Рис. 8.33. Схема работы земснаряда:
/ _ грунтоприемник; 2
— всасывающий грунтопровод; 3 — землесос; 4 —
двигатель землесоса; 5
— нагнетательный грунтопровод; 6 —
понтон
Таб лица 8.2
Величины уклонов канав и лотков для транспортирования размытого грунта
| Грунт
|
Уклоны
|
| в забой по грунту
|
в земляной канаве
|
| Глинистый и суглинистый Мелкий песок, супесь Крупно- и среднезернистый песок
Гравий
|
0,02—0,025
0,025—0,035
0,3—0,050
0,4—0,080
|
0,02—0,03
0,03—0,05
0,03—0,07
0,01—0,12
|
Землесосная установка (земснаряд) представляет собой плавучее устройство, к которому подвешен грунтоприемник, всасывающий грунт при помощи землесоса (рис. 8.33, а).
Грунтоприемник (рис. 8.33, б) и землесос соединены всасывающим грунтопроводом. Для облегчения всасывания грунт разрушается дополнительно гидромонитором (рис. 8.33, в),
специальной фрезой (рис. 8.33, г)
или гидроэжекторным устройством (рис. 8.33, д).
Землесос всасывает смесь разрушенного грунта с водой и подает ее в трубопроводы, через которые она транспортируется к месту укладки. По мере выработки грунта у одной стоянки земснаряд перемещается на другое место. Чтобы частицы пульпы, всасываемой земснарядом, находились во взвешенном состоянии (иначе трубопровод будет забиваться оседающими частицами грунта), скорость потока должна быть не меньше определенных заданных величин. Эта скорость (м/с) должна быть для песков 10—12; легких суглинков и супесей средней плотности 18—25; суглинков средней плотности и тяжелых супесей 20—26; тяжелых глин 30—35.
Производительность земснаряда зависит от консистенции пульпы, т. е. от отношения объема грунта к объему воды. Производительность при разработке полезных ископаемых зависит от того, какая часть добываемого материала в виде частиц, загрязняющих материал или негодных для укладки в сооружение, сбрасывается вместе с водой. При известном объеме грунта V
(м3
), подлежащего разработке, производительность земснаряда, м3
/ч
П = Кv,
(8.25)
где К —
коэффициент, зависящий от продолжительности работы установки (дн.), числа часов работы установки (сут.), использования земснаряда по времени, длины транспортирования грунта, объема воды, необходимого для разработки грунта.
 Для транспортирования пульпы требуется, чтобы диаметр пульповода D
был не меньше определенной величины, т. е. необходимо, чтобы площадь сечения трубопровода обеспечивала бы истечение заданного объема пульпы при необходимой скорости v
п,
т. е. Для транспортирования пульпы требуется, чтобы диаметр пульповода D
был не меньше определенной величины, т. е. необходимо, чтобы площадь сечения трубопровода обеспечивала бы истечение заданного объема пульпы при необходимой скорости v
п,
т. е.
(8.26)
По заданной производительности, категории разрабатываемого грунта, дальности транспортирования пульпы определяют требуемую мощность установки.
МАШИНЫ ДЛЯ БУРЕНИЯ
Буровые работы в строительстве осуществляются при помощи буровых машин (станков) и ручных машин. Буровыми машинами производят бурение котлованов диаметром до 3 м для установки мачт линий электропередачи и набивных свай, котлованов диаметром до 0,75 м для опускания свай в мерзлый грунт, шпуров в мерзлом грунте и горных породах для взрывных работ, а также при геологоразведочных работах.
В зависимости от условий бурения рабочему органу сообщаются различные движения.
Вращательное бурение, когда рабочий орган только вращается. Вращательное бурение можно вести двумя способами: разрушать всю породу в пробуриваемом отверстии или высверливать кольцевую щель, внутри которой остается столбик породы (керн), как показано на
Рис. 8.34. Схемы способов бурения
рис. 8.34, а, б.
Второй способ менее энергоемок, поскольку не тратится энергия на разрушение остающейся внутри инструмента породы. При вращательном бурении требуется большое усилие подачи для внедрения инструмента. Это усилие в значительной степени определяет глубину внедрения инструмента за один оборот, а следовательно, и производительность.
С увеличением прочности горной породы значительно возрастает усилие, необходимое для внедрения инструмента, что является одной из основных причин, ограничивающих возможность применения способа вращательного бурения горных пород.
Ударное бурение (рис. 8.34, в).
При этом способе инструмент внедряется в горную породу в результате сбрасывания его с определенной высоты или в результате ударов по его хвостовой части. После каждого сбрасывания или удара инструмент приподнимают, поворачивают на некоторый угол и таким образом обрабатывают всю торцевую поверхность забоя. Рабочий инструмент находится в контакте с породой только часть времени. Во время опускания инструмента :,о контакта с породой разрушения ее не происходит. Время на подъем инструмента, его поворот и опускание составляет более 40% от общего времени работы, поэтому производительность ударного бурения относительно невысока.
Преимуществом ударного бурения является то, что создаются большие силы удара, а следовательно, и большие удельные нагрузки на лезвие коронки. Хрупкие породы разрушаются легче под действием удара, чем под действием статических нагрузок, поэтому ударное бурение рекомендуется применять для бурения пород выше средней прочности.
Ударно-поворотное бурение (рис. 8.34, г).
При этом способе одновременно с внедрением лезвия под действием удара оно поворачивается на некоторый угол, обычно на 10—15°, благодаря чему увеличивается
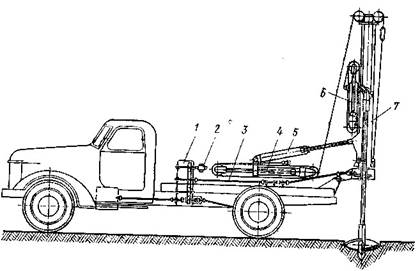
Рис. 8.35. Машина для бурения котлованов под опоры мачт линий электропередачи:
/ — коробка отбора мощности для привода бура и гидронасоса; 2
— гидронасос; 3
— карданный вал привода бура; 4 —
гидроцилиндр подъема буровой штанги; 5
— гидроцилиндр подъема и поворота рамы совместно со штангой; 6
— гидроцилиндр подачи штанги в направлении бурении; 7
— буровая штанга
разрушаемая поверхность забоя. После удара и поворота инструмента на некоторый угол он приподнимается и цикл повторяется. Хотя при этом способе бурения инструмент находится в контакте с породой только часть времени, однако производительность его на 50—60% выше, чем при ударном бурении.
Ударно-вращательное бурение
(рис. 8.34, д, е)
осуществляется посредством непрерывного вращения инструмента и периодических ударов по нему. При этом способе используются одновременно положительные особенности ударного бурения, т. е. возможность создания большого осевого ударного усилия на режущем лезвии, и вращательного бурения, т. е. непрерывное отделение породы от массива. Производительность при этом способе в 2—3 раза выше, чем при ударном бурении, и в 1,4—1,8 раз выше, чем при вращательном.
Термическое бурение
(рис. 8.34, ж)
заключается в том, что порода разрушается под действием высокой температуры и давления газовой струи. К породе подводят газы при температуре 2500—3000°С со скоростью до 2000 м/с. Этот способ можно применять для бурения пород, которые растрескиваются, а не плавятся.
Для бурения ям под столбовые фундаменты, опоры линий электропередачи в талом и мерзлом грунтах используют мощные бурильные установки на тракторах или автомобилях (рис. 8.35). Бур приводится во вращение двигателем автомобиля через коробку отбора мощности и карданные валы. Внедряется бур в грунт при помощи гидроцилиндра и канатной передачи. Благодаря этому при сравнительно малом ходе цилиндра (800—1000 мм) рабочий орган внедряется на глубину до 4 м. Такой установкой можно бурить как вертикальные скважины, так и под углом. Для этого раму устанавливают в нужное положение при помощи гидродомкрата.
При транспортировании установка укладывается на машину с помощью таких же домкратов. Осевое усилие, которое можно развивать на этой установке, ограничивается весом автомобиля и трактора.
МАШИНЫ ДЛЯ РАЗРАБОТКИ МЕРЗЛЫХ ГРУНТОВ
Мерзлые грунты разрабатывают как специальными, так и обычными землеройными машинами, для чего грунт предварительно разрушают. Для разработки мерзлых грунтов можно использовать и землеройные машины, рабочие органы которых будут соответственно приспособлены. Однако производительность таких машин значительно ниже, чем при разработке талых грунтов.
Лучшие результаты по производительности труда, стоимости и металлоемкости дает рыхление мерзлых грунтов рыхлителями на тракторах мощностью 300—750 кВт, с отвозкой разрыхленного грунта самоходными скреперами усиленной конструкции емкостью 30 м3
и выше. Существуют различные механические способы разрушения мерзлых грунтов.
Разрушение грунта при помощи клиньев или шаров большого веса
(500 кгс и более), которые подвешиваются на подъемных канатах экскаваторов . или гусеничных кранов и сбрасываются с высоты 5—8 м. Шары рекомендуется применять при разработке песчаных и супесчаных грунтов, клинья — при разработке глинистых грунтов. Эти способы применяют только при отсутствии современного оборудования, так как они малопроизводительны.
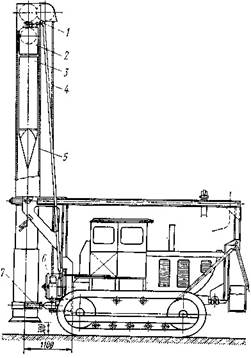
Рис. 8.37. Установка для рыхления мерзлых грунтов:
/ — оголовок; 2
— автоматический сцеп; 3
— рабочий орган (клин); 4
— канат; 5 — направляющая; в
— лебедка; 7 — узел амортизации
В зависимости от. веса сбрасываемого шара или клина производительность составляет 25—30 м3
/смен. При этом способе разрушения увеличивается износ экскаваторов и особенно износ канатов лебедок из-за больших динамических нагрузок.
Откол крупных глыб с помощью рабочего оборудования, навешенного на трактор или экскаватор.
Оборудование представляет собой клин, внедряемый в грунт под действием собственного веса. Одна из таких установок показана на рис. 8.37, где клин поднимается на 4 м при помощи лебедки, приводимой в движение от коробки отбора мощности трактора. Вес груза составляет 1,5 т. Несмотря на малое количество ударов (8—10 ударов в минуту), производительность этой установки значительно выше, чем при сбрасывании клиньев или шаров без направляющих.
Аналогичные опытные установки изготовляются с 1948 г. Производительность труда (с транспортом) составляет от 12 до 20 м3
на 1 чел/ч, а производительность в смену 100—200 м3
.
Резание грунта с помощью дисковых пил, цепных баров и приспособленных для разработки мерзлых грунтов роторных экскаваторов.
Навесное оборудование в виде дисковых пил применяют для нарезки щелей шириной 30—35 мм на всю глубину промерзания или на 0,7 этой глубины. Щели нарезаются так, чтобы расстояние между ними составляло 0,8—1,0 м. Это дает возможность разрабатывать грунт между щелями (отрывать глыбы) экскаватором. Расстояние между щелями выбирают в зависимости от типа, которым будет разрабатываться грунт и от ширины зева его ковша. Недостатком применения дисковых пил является то, что они могут углубляться в грунт не больше чем на 0,4 диаметра.
Навесное оборудование в виде режущих цепей (цепных баров) получило наиболее широкое распространение. На рис. 8.38 показана одна из таких установок.
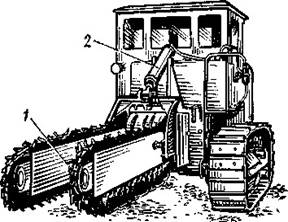
Рис. 8.38. Установка для нарезания щелей в мерзлом грунте; / — цепные бары; 2
— напорный механизм
В качестве рабочего органа служит цепь, на которой закреплены резцы. Цепи приводятся в движение от вала отбора мощности при помощи редуктора, устанавливаемого на тракторе. Преимущество таких установок по сравнению с дисковыми пилами в том, что цепями можно нарезать щели большой глубины (до 2 м и более). Скорость резания равна 2—2,5 м/с. Рабочая скорость движения машины 30—70 м/ч. Чтобы трактор двигался с этой скоростью, устанавливают уменьшитель скорости. Сменная производительность установок 50 м3
/смен. Толщина срезаемой стружки 2—3 см.
Недостаток этих установок — значительные потери на трение в цепях, достигающие 60% общей потребляемой мощности, быстрый износ цепей и необходимость извлечения глыб другой машиной.
Для заглубления режущих цепей в грунт и фиксирования их в определенном положении применяют напорный механизм, представляющий собой гидроцилиндр, закрепляемый на кронштейне при помощи цапф. Благодаря такому креплению гидроцилиндр может поворачиваться по мере поворота режущей цепи (бара), его опускания или подъема. В транспортном положении машины бары поднимаются гидроцилиндром в горизонтальное положение и закрепляются защелкой.
Для разработки мерзлых грунтов на глубину до 0,5—0,6 м применяют землеройно-фрезерные машины (рис. 8.39). Она состоит из тягача 1
и навесного оборудования. Фреза 6
приводится во вращение от коробки отбора мощности 2.
Вращение передается через карданный вал 4
и редуктор 5. Подъем и опускание фрезы, а также создание напорного усилия осуществляются гидроцилиндром 3.
Из обычных землеройных машин для разработки мерзлого грунта применяют:
1. Многоковшовый траншейный экскаватор продольного копания. Клыки ковшей экскаватора устанавливаются так, что часть грунта разрушается в условиях полублокированного резания; это снижает энергоемкость процесса. Значительно усилена конструкция приводных цепей и рамы, на которой установлены цепи.
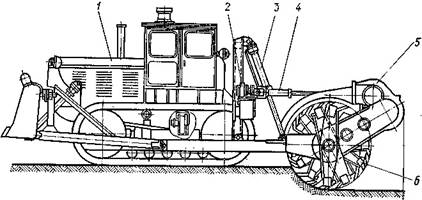
Рис. 8.39. Землеройно-фрезерная машина
2. Роторный траншейный экскаватор. Так как ротор имеет жесткую конструкцию, то роторные экскаваторы, у которых клыки ковшей установлены так же, как и в предыдущем случае, позволяют разрабатывать мерзлый грунт. Для эффективной работы мощность траншейного экскаватора должна быть не меньше 300 кВт и поэтому создаются роторные экскаваторы мощностью 500 кВт и более, которые более эффективны, чем цепные.
Производительность обычных экскаваторов при разработке мерзлых грунтов составляет 0,1 — 0,2 их нормальной производительности, и поэтому их рекомендуется применять только при случайных работах на небольших объектах.
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТА
Большинство земляных сооружений уплотняется искусственно, так как насыпные грунты не имеют требуемой плотности и равномерности последующей осадки.
Различают следующие способы уплотнения грунтов: укатывание, трамбование, вибрация
.
Для уплотнения связных и малосвязных грунтов — суглинков и супесей — может быть рекомендован способ укатки.
Уплотнять несвязные грунты — песчаные, гравелнстые и галечные — лучше всего трамбованием и вибрацией.
Машины для уплотнения грунтов классифицируются на следующие группы: катки статического действия (с гладкими вальцами, с кулачковыми вальцами, с пневматическими шинами, с вибровальцами); трамбующие машины — с вальцами, с падающим грузом, с трамбующими плитами, с виброплитами.
Основные из этих машин показаны на рис. 8.40.
По способу передвижения катки разделяют на прицепные, самоходные и пслуприцепные. Самоходные катки с гладкими вальцами делят на легкие (массой 2—5 т), средние (6—9 т) и тяжелые (10—15 т). Прицепные и полуприцепные катки на пневматических шинах выпускаются
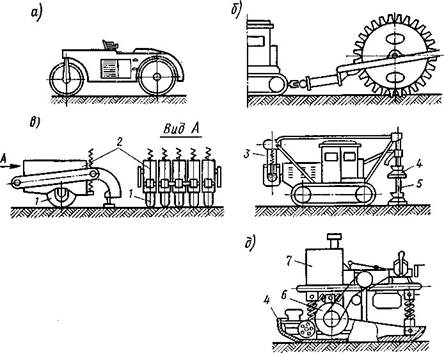
Рис. 8.40. Схемы грунтоуплотняющих машин:
а
— каток с гладкими вальцами; б
— кулачковый каток прицепной; в
—
пневмоколесный прицепной каток; г
— трамбовочная плита на тракторе; д
— самоходная виброплита; / — пневматические шины; 2
— балластные ящики; 3
— механизм подъема и сбрасывания
плиты;
4
— плита; 5
— направляющие; 6
— вибровозбудитель; 7
— двигатель массой вместе с балластом от 10 до 100 т. Вибрационные самоходные катки имеют массу от 1,4 до 6 т без балласта и до8тс балластом.
В последнее время выпускают катки с гладкими вальцами с объемным гидроприводом. Схема такого катка показана на рис. 8.41. Двигатель / приводит в действие насос 2.
Через распределители 3
жидкость подается к гидромоторам 4
привода вальцов 5.
Поворот катка осуществляется поворотом одного из вальцов при помощи гидроцилиндров 6.
Для уплотнения грунта необходимо на поверхности создать такие удельные давления (напряжения), чтобы после снятия нагрузки грунт остался деформированным. Необходимо, чтобы напряжений, которые развиваются на поверхности контакта рабочих органов машин с уплотняемым грунтом, не превышали предела прочности грунта.
Для эффективного уплотнения величина удельного давления должна быть близка к пределу прочности. Лучше, если оно составляет 0,9—1 предела прочности sв.
По мере уплотнения грунта увеличиваются его прочность и плотность. Следовательно, чтобы повысить эффективность уплотнения, необходимо увеличивать удельные давления. Однократное наложение напряжения не обеспечивает необходимого уплотнения, поэтому приходится прилагать нагрузки на грунт несколько раз.
Для катков с гладкими вальцами и на пневмоколесном ходу удельное давление принято оценивать в кгс/см, т. е. удельное давление
5 4 3
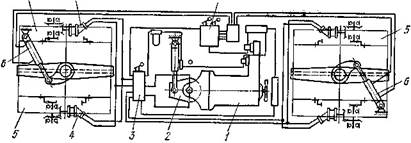
Рис. 8.41. Каток с гладкими вальцами и гидроприводом
на 1 пог. см ширины вальца. В действительности под катком образуются площадки, ширина которых при одинаковом весе катка зависит от диаметра катка и от физико-механических свойств уплотняемого грунта.
Чтобы повысить эффективность уплотнения, его следует вести группой катков, причем вначале уплотнять легкими катками, а затем тяжелыми. Легкими катками рекомендуется делать 30—40% общего количества проходов. Если грунт имеет плотность 0,9 smах
, его уплотняют одними тяжелыми катками.
Катками с гладкими вальцами и пневмоколесными катками можно уплотнять грунты слоями около 0,15 м. Количество проходов для связных грунтов колеблется от 8 до 12.
Кулачковыми катками можно уплотнять грунт слоями 0,2—0,25 м.
Остаточные деформации в грунте при одних и тех же удельных давлениях зависят от скорости перемещения катков. Опытами установлено, что скорость перемещения должна быть различна на первой и второй стадиях уплотнения. Первые и последние проходы следует выполнять на скоростях, меньших, чем промежуточные проходы.
При работе катков приходится преодолевать различные силы сопротивления.
Сила сопротивления перемещению катка
W1
=G
w, (8.29)
где G
— вес катка; w — коэффициент сопротивления катка передвижению, в большой степени зависящий от состояния уплотняемого слоя (для разрыхленного грунта w = 0,18).
Сила сопротивления, связанная с преодолением подъема, кгс (Н),
W2
= Gi,
(8.30)
где i
— уклон местности (обычно i<0,1).
Сила сопротивления от преодоления сил инерции, кгс (Н),
W
3
= Gv
/ gt
(8.31)
где v
— скорость катка, м/с; g
— ускорение свободного падения, м/с2
; t
— время разгона катка (t =
3—4 с), с.
Сила сопротивления катка передвижению по кривой при движении на рыхлом щебне
W
4
= 0,3G
в
, кгс (Н), (8.32)
где G
— доля веса катка, передаваемая на поворачиваемый (ведомый) валец.
При уплотнении грунта пневмоколесными катками на процесс уплотнения влияют: давление в шинах; зазоры между шинами; вес катка; скорость его перемещения.
Расстояние между торцевыми поверхностями шин должно быть не больше 0,4 ширины шины. Удельное давление на грунт зависит от веса катка (при заданном количестве шин), который должен быть таким, чтобы удельное давление было не более 1,0. Вес подбирают также и в зависимости от допускаемых конструкций шины нагрузок на шину.
Число проходов пневмокатков при уплотнении песчаных грунтов составляет 2—3, супесчаных 3—4, суглинистых и тяжелосуглинистых 5—6 проходов.
При уплотнении трамбованием в грунте напряжения возникают в результате действия веса рабочего органа, которым может являться свободно падающий груз или плита (трамбовка).
Проф. Н. Я. Харахута предложил определять величину напряжения в зависимости от удельного импульса силы:
i = J / F = Qv / gF
(8.33)
где J
= Qv/g
—полный импульс, кгс*с (Н*с); Q
— вес рабочего органа, кг; v
— скорость в момент соударения рабочего органа с грунтом, м/с; F
— площадь трамбующего рабочего органа, м.
Величины удельных импульсов не должны быть больше определенных значений, так как с их увеличением ухудшается уплотнение и грунт разрушается. Предельные значения этих импульсхв для малс-сгязных грунтов составляют 0,040—0,060 кгс*с/см2
, а для весьма срязных грунтов 0,175—0,225 кгс*с/см2
.
Если уплотняются насыпные грунты, то величину допускаемых импульсов принимают равней 0,8—0,9 от предельных значений. При уплотнении грунтов с ненарушенной структурой они Moгут быть увеличены в 1,5—2 раза.
ОБОРУДОВАНИЕ ДЛЯ СВАЙНЫХ РАБОТ
Для устройства искусственных оснований и при возведении временных перемычек в грунт погружают сваи или металлический шпунт.
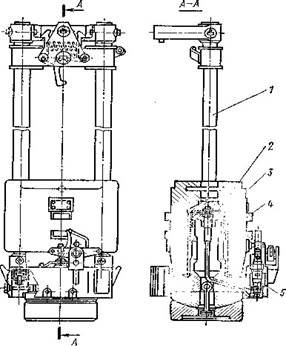
Рис. 8.42. Штанговый дизель-колот
Сваи (шпунт) погружаются следующими способами: забивкой, вибрацией, вдавливанием, ввинчиванием, забивкой с подмывом грунта водой Наиболее распространенными являются забивка и вибрационное погружение.
При забивке преодолевается сопротивление погружению в грунт, а также сопротивление трению сваи о грунт. Для внедрения сваи необходимо, чтобы работа каждого удара была не меньше определенной величины, иначе при ударах будут происходить только упругие деформации и сваи не внедрятся в грунт. Величина необходимой работы каждого удара, при котором будет происходить забивка сваи, зависит от ее сечения и свойств грунта. Чем больше сечение сваи, тем значительнее величина этой работы. Для забивки свай сечением 0,25 х 0,25 м даже в слабые грунты требуется, чтобы работа единичного удара была не меньше 10 тс*м.
Производительность при забивке сваи, т. е. скорость ее внедрения тем выше, чем больше разность между минимальной величиной работы, которая необходима для внедрения, и той величиной работы, которую может обеспечить молот в соответствии с его весом и высотой падения Н,
а также чем больше число ударов, которое сообщается свае в единицу времени.
Минимальная величина работы единичного удара возрастает с увеличением глубины внедрения, так как повышается сила трения. Комплект оборудования
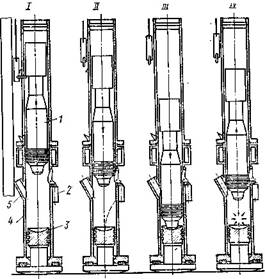
Рис. 8.43. Схема работы трубчатого дизель-молота:
/ — подъем ударной части; // — подача топлива в шабот и продувка цилиндра; /// — удар по шаботу, распыливание топлива и взрыв; IV
— рабочий ход поршня, выхлоп; / — поршень (ударная часть); 2
— топливный насос; 3
— шабот; 4
— корпус цилиндра; 5
— выхлопные окна
для забивки свай называется сваебойной установкой. Она состоит из подъемного и силового оборудования, свайного молота и копра, на котором монтируется это оборудование.
Свайные молоты
бывают дизельные и электрические (вибропогружатели и вибромолоты), а также механические и паровоздушные, которые применяют редко.
Для забивки свай наиболее широко применяют штанговые и трубчатые дизель-молоты. Работа штангового дизель-молота (рис. 8.42) основана на следующем принципе. На поршень 4,
по оси которого имеются отверстия для подачи топлива, сбрасывается цилиндр 3
значительного веса, в результате чего воздух в цилиндре сжимается. В это время через форсунку 2
в поршне в цилиндр впрыскивается топливо, которое воспламеняется под действием температуры сжатого воздуха. В результате расширения газов цилиндр подбрасывается вверх, после чего цикл повторяется. Подача топлива осуществляется насосом 5,
который приводится в движение падающим цилиндром. Давление, передаваемое поршню при падении цилиндра, используется для забивки сваи. Дизельмолот подвешен на канате копровой установки, который во время работы висит свободно. Падающий цилиндр движется по Двум направляющим штангам /. Для запуска дизель-молота цилиндр поднимается при помощи троса и лебедки и подвешивается на крюке, закрепленном на верхней траверсе.
Дизель-молоты выполняют с различным весом ударной части: 600, 1200 и 1800 кг (18 000 Н). Максимальная высота подбрасывания груза равна 2 м. Обычно она бывает меньше и зависит от сопротивления сваи внедрению. При малых сопротивлениях получается недостаточное сжатие в цилиндре, а следовательно, и недостаточная мощность для подбрасывания цилиндра.
Значительная часть энергии падающего груза в дизель-молотах расходуется на сжатие воздуха в цилиндре и на механические потери. Поэтому полезная работа
A
п
= GH
h - А
сж
(8.35)
где G
— вес падающего груза, т; Н
— высота падения, м; h — КПД; Асж
— работа, затрачиваемая на сжатие, т*м.
Работа, идущая на сжатие в цилиндре, обычно составляет около 35— 40% от общей энергии падающего груза.
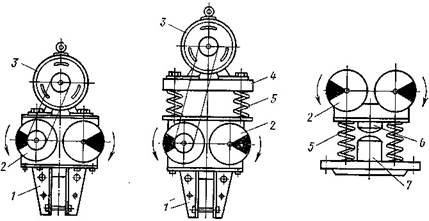
Рис. 8.44. Схемы вибропогружателей:
/ — наголовник; 2
— вибратор; 3
— электродвигатель вибратора; 4
— плита; 5
— пружины;
6
— боек; 7
— наковальня
У трубчатых дизель-молотов принцип работы тот же, но здесь цилиндр неподвижен.
Последовательность работы трубчатого дизель-молота показана на рис. 8.43. У трубчатых дизель-молотов суммарная энергия ударов в единицу времени по сравнению со штанговыми значительно больше. Это объясняется лучшим тепловым балансом. Поэтому штанговые молоты следует заменять трубчатыми. Они изготовляются с весом ударной части 600, 1200, 1800, 3000 и 5000 кгс и могут забивать сваи весом до 13 т (130 кН). Ведутся работы по созданию дизель-молотов с весом ударной части даже 15 т.
Свайные вибропогружатели
(рис. 8.44) впервые в мировой практике были применены в СССР.
Обычный вибропогружатель состоит из вибровозбудителя направленного действия, который закрепляется непосредственно на наголовнике.
Для повышения эффекта погружения применяют вибропогружатели с дополнительными пригрузочными плитами.
Копры
служат для установки и поддержания свай в процессе их забивки, для подвески молотов, для установки лебедок, а также паровых и компрессорных установок. Они бывают металлические и деревянные.
Различают универсальные копры, применяемые для различных видов работ; краны-копры, в которых использованы грузоподъемные стреловые краны, приспособленные для навешивания молотов и другого
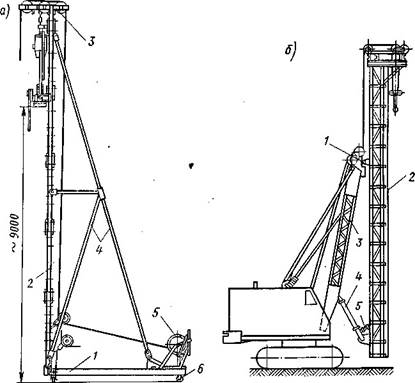
Рис. 8.45. Копровые установки:
а
— копер для дизель-молота; / — рама; 2 — стоика; 3
— оголовник с роликами; 4
— подкосы; 5
— лебедка; 6
— ролик для перемещения копра; б
— схема сваебойного агрегата на базе экскаватора; / — сферическая опора; 2
— копровая стрела; 3
— стрела; 4. 5
— гидроцилиндры
оборудования для забивки свай, а также копры, предназначенные для погружения свай на местности, покрытой водой, и для других специальных работ.
На рис. 8.45 показан наиболее простой разборный металлический копер для дизель-молота. Рама копра устанавливается на четыре ролика, что облегчает его перемещение. На раме смонтирована вертикальная стойка с направляющими для молота. Вверху стрелы закреплен оголовник с роликами для канатов подвески молота, подъема опускания молота и для подъема сваи или шпунта.
Наибольшее применение сейчас имеют самоходные копровые установки (рис. 8.45, б).
Копровая стрела закрепляется на крановой стреле или стреле драглайна при помощи сферического подпятника, что позволяет сообщать ей наклон относительно вертикали. Поворот стрелы осуществляется двумя гидроцилиндрами, один конец которых прикреплен к копровой стреле, а другой к крановой стреле. Возможность поворота стрелы позволяет быстрей и точней устанавливать сваю или шпунт в нужном положении.
Для подвешивания сваебойного оборудования, а также подъема сваи используются лебедки базовой машины.
В последнее время получило распространение устройство фундаментов и конструкций способом «стена в грунте». Принцип этого способа заключается в том, что в грунте сооружается сплошная стенка из монолитного железобетона или отдельных свай, примыкающих друг к другу. Для выполнения этих работ применяются специальные установки и оборудование: многоковшовые траншейные экскаваторы с удлиненной стрелой, грейферные установки, траншейные драглайны.
СМЕСИТЕЛЬНЫЕ МАШИНЫ
Бетонные смеси и растворы в настоящее время изготовляют в основном на заводах большой производительности, откуда транспортными средствами их доставляют на отдельные объекты. Однако в отдельных случаях их приходится изготовлять на небольших установках построечного типа.
Производительность больших заводов достигает 15—20 м3
бетонной смеси на одного рабочего в смену, а установок построечного типа — не больше 3—4 м3
/смен; стоимость бетона при этом в несколько раз выше, чем изготовление его на больших заводах.
Бетонные заводы могут быть временными (сборно-разборными) и обслуживать один объект или несколько близко расположенных объектов; стационарными и обслуживать объекты, расположенные на расстоянии до 35 км от завода.
Начинают применяться сборно-разборные стационарные автоматизированные установки циклического и непрерывного действия производительностью до 30—60 м3
/ч. Они состоят из отдельных укрупненных блоков с технологическим и электротехническим оборудованием. Благодаря этому можно быстро производить монтаж и демонтаж установки для ее перевозки на другой объект.
Для объектов с небольшими объемами бетонных работ, расположенных на значительном расстоянии от централизованных бетонных заводов, целесообразно применять передвижные автоматизированные бетоносмесительные установки.
В строительстве применяют способ предварительного приготовления сухих смесей. Вода добавляется в них в автобетоносмесителей при транспортировании или на объекте. Сухие смеси готовят на заводах сухой смеси или на тех же заводах, где готовят обычные бетонные смеси.
Технологический процесс приготовления бетонных смесей состоит: из подачи сухих компонентов смеси из штабелей или транспортных средств в над бункерное отделение и в бункера, затем к дозаторам; дозирования этих компонентов, одновременно воды; подачи их в бетоносмесители; перемешивания и выгрузки готовой смеси. В соответствии с этим основным оборудованием бетонных установок или заводов являются: бетоносмесители, дозирующие устройства, расходные бункера, транспортирующие устройства.
В зависимости от расположения оборудования различают два типа бетонных заводов: 1) с компоновкой по партерной схеме, когда компоненты приходится поднимать два или три раза (рис. 10.1, а
),
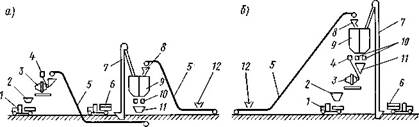
Рис. 10.1. Схемы компоновки основного оборудования бетонных заводов:
/ —
автобетоновоз; 2 —
бункер готовой смеси; 3
— бетоносмеситель; 4
— дозатор воды; 5
— конвейеры на завод; 6
— цементовоз; 7
— элеватор; 8 —
поворотная воронка; 9
— наддозаторные бункера; 10
— дозаторы для сухих компонентов; // — воронка для сухой смеси; 12
— конвейер со склада заполнителей
в зависимости от этого схема называется двухступенчатой или трехступенчатой; 2) с компоновкой по вертикальной схеме, когда все компоненты для приготовления бетонной смеси поднимаются в бункера, находящиеся наверху, а дальнейшее перемещение компонентов происходит под действием собственной массы, т. е. гравитационно (рис. 10.1, б).
Бетоносмесители.
Перемешивание бетонных смесей осуществляется в бетоносмесителях. Они разделяются: 1) по характеру работы — на смесители циклического (периодического) действия, в которых загрузка материалов, перемешивание смеси и ее выгрузка производятся порциями, и непрерывного действия, в которых загрузка, перемешивание и выгрузка смеси осуществляются непрерывно. Бетоносмесители циклического действия проще по конструкции, позволяют быстро перестроиться на выпуск бетона любой марки и жесткости. Бетоносмесители непрерывного действия компактнее, их металлоемкость меньше, они больше приспособлены к работе в автоматизированных технологических линиях; 2) по способу перемешивания — на смесители с перемешиванием при свободном падении материалов (гравитационные) и с принудительным перемешиванием.
В первом случае смешиваемые материалы поднимаются с помощью лопастей, закрепленных на внутренней поверхности барабана, и затем падают под действием собственной массы. Во втором случае перемешивание осуществляется с помощью лопастных валов, перелопачивающих смесь. На рис. 10.2 приводятся принципиальные схемы способов перемешивания.
Г р а в и т а ц и о н н ы е б е т о н о с м е с и т е л и
применяются для приготовления подвижных (пластичных) бетонных смесей с осадкой конуса до 8 см. ГОСТ 16349—70 предусматривает девять типоразмеров гравитационных бетоносмесителей с объемом готового замеса бетонной смеси 65, 165, 330, 500, 800, 1000, 1600, 2000, 3000 л (дм3
).
Бетоносмесители принудительного действия применяются для приготовления малоподвижных и жестких бетонных смесей с крупностью заполнителей до 80 мм. Их производительность больше, чем у гравитационных бетоносмесителей. ГОСТ 16349—70 предусматривает восемь типоразмеров бетоносмесителей принудительного действия с объемом готового замеса бетонной смеси 65, 165, 330, 500, 800, 1000, 2000 и 3000 л (дм3
).
Одним из основных параметров смесителей является частота вращения барабана. От частоты вращения барабана, а следовательно, и от окружной скорости зависит качество перемешивания и производительность. Частота вращения не должна превышать определенных значений, так как с увеличением скорости ухудшается качество перемешивания вследствие того, что материал прижимается центробежной силой к внутренней поверхности.
Частота вращения задается в зависимости от емкости смесительного барабана и составляет 12 об/мин для емкости 2400 л (дм3
) и 24 об/мин для емкости 100 л (дм3
). Еще большее значение имеет правильный выбор окружной скорости для бетоносмесителей непрерывного действия со свободным падением материала. При высокой частоте вращения материал будет проходить через барабан, не перемешиваясь. То же самое относится к бетоносмесителям с лопастями.

Рис. 10.3. Схема гравитационного передвижного бетоносмесителя
Выбор бетоносмесителя зависит от того, какой бетон и в каком количестве нужно приготовить. Жесткие бетоннные смеси должны перемешиваться в смесителях с принудительным перемешиванием. Для перемешивания таких материалов стали применять вибросмесители.
Передвижные гравитационные бетоносмесители имеют полезный объем барабанов 65,165 и 330 л и применяются на небольших строительствах.
Один из типов таких смесителей с объемом барабана 165 л показан на рис. 10.3. На раме 1
смонтирован грушевидный смесительный барабан 7 с электрическим приводом 9,
состоящим из электродвигателя и редуктора. На раме установлен гидравлический насос 2
для подачи воды.
Для загрузки барабана применен скиповый подъемник. На ковше 4
этого подъемника установлен вибровозбудитель для лучшего опорожнения барабана. Ковш движется по направляющим 3
подъемника. Ковш 4
поднимается и опускается с помощью канатов, наматываемых на барабаны 5,
которые приводятся в движение отдельным реверсивным электродвигателем 6
через червячный редуктор. Червячная передача оборудована концевыми выключателями, ограничивающими ход ковша. Наклон барабана для выгрузки смеси производится ручным механизмом, состоящим из штурвала 8,
редуктора и фиксатора.
Стационарные гравитационные бетоносмесители имеют полезный объем 330—3000 л и применяются на заводах.
В последнее время промышленностью освоены и выпускаются стационарные бетоносмесители объемом 330 и 880 л более совершенной конструкции с центральным приводом.
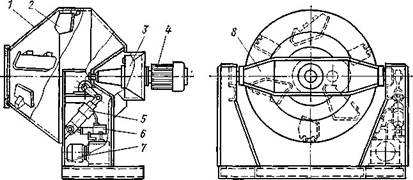
Рис. 10.5. Гравитационный бетоносмеситель с центральным приводом барабана
Схема такого смесителя показана на рис. 10.5. Барабан 1
с лопастями 2
установлен на оси траверсы 8
и соединен с валом редуктора 3,
который приводится в движение электродвигателем 4.
Наклон барабана для выгрузки осуществляется гидроцилиндром 5.
Подача воды производится гидронасосом 6,
приводимым в действие отдельным электродвигателем 7.
Бетоносмесители с принудительным смешиванием разделяют на циклические и непрерывного действия.
Б е т о н о с м е с и т е л и ц и к л и ч е с к о г о д е й с т в и я
используют для приготовления бетонных смесей с крупностью заполнителя не более 70 м. Наиболее эффективными являются смесители, у которых в неподвижной чаше вращается ротор с лопастями. Ротор вращается вокруг своей оси, а лопасти дополнительно вращаются вокруг собственной оси или, как в планетарных редукторах, вокруг оси, приводящей в движение два лопастных вала.
Один из таких бетоносмесителей показан на рис. 10.6. Электродвигатель 2
приводит во вращательное движение траверсу 3, в которой размещены шестерни планетарной передачи. Одновременно с траверсой 3
вращаются оси 4 с
установленными на них шестернями 5. Шестерни 5
вращаются вокруг оси двигателя и вокруг собственной оси.
На оси 4
закреплена траверса 7, на которой имеются два стержня 8
с лопастями 9.
Стержни вращаются вокруг оси смесителя, а также вокруг оси
4.
Такое перемещение лопастей создает интенсивное перемещение бетонной смеси. Загрузка составляющих производится через загрузочную воронку 1,
а выгрузка через отверстие в днище, закрываемое затвором 10.
Вода в смеситель подается по кольцевому трубопроводу 6,
благодаря чему достигается равномерное орошение водой.
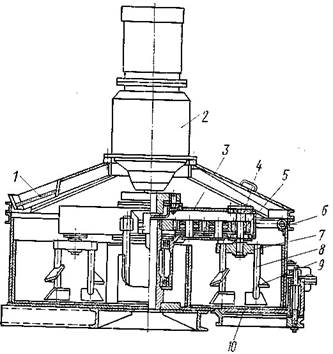
Рис. 10.6. Бетоносмеситель с принудительным перемешиванием
Б е т о н о с м е с и т е л и н е п р е р ы в н о г о дейс твия
, гравитационные (рис. 10.7, а, б).
В смесителях этого типа перемешивание происходит так же, как и в смесителях циклического действия, со свободным падением, но лопасти внутри барабана расположены так, что при вращении барабана бетон перемещается от одного места загрузки к другому концу, где выгружается смесь. Длина барабана подбирается такой, чтобы перемешивание смеси происходило в соответствии с техническими требованиями.
Такой бетоносмеситель состоит из барабана / с лопастями, установленного на роликах 5. Барабан получает вращение от электродвигателя 2
через редуктор 3
и зубчатое колесо 4.
Загружаются материалы через лоток. При диаметре барабана 1600 мм и длине 4 м производительность составляет 130 м3
/ч, что равняется производительности четырех бетоносмесителей емкостью 2400 л. Мощность смесителя 40 кВт, энергоемкость 0,3 кВт*ч/м3
. Смеситель целесообразно применять на крупных гидростроительствах.
Б е т о н о с м е с и т е л и н е п р е р ы в н о г о д е й с т в и я с п р и н у д и т е л ь н ы м п е р е м е ш и в а н и е м
. В корпусе 3
смесителя
(рис. 10.8) помещены два вала 4
с лопастями 5, вращаю-
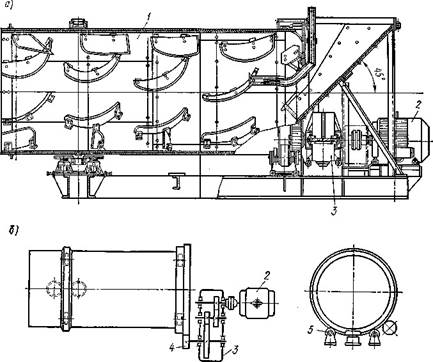
Рис. 10.7. Гравитационный бетоносмеситель непрерывного действия: а
— общий вид; б
— кинематическая схема
щимися в противоположных направлениях. Валы приводятся во вращение от электродвигателя / через редуктор 2.
Материалы загружаются через бункер в одном конце барабана и по мере перемешивания перемещаются к другому концу, откуда выгружаются. Длина валов с лопастями и корпуса барабана делается такой, чтобы качество перемешивания смеси соответствовало техническим требованиям. Бетоносмесители выпускаются производительностью 5—60 м3
/ч, мощностью соответственно 4,5 ¸ 40 кВт и энергоемкостью от 0,75 кВт*ч/м3
для смесителей большой производительности и до 1 кВт*ч/м3
для смесителей малой производительности.
Энергоемкость этих смесителей больше, чем смесителей свободного перемешивания и принудительного перемешивания циклического действия. По конструкции эти бетоносмесители сложнее, чем смесители со свободным падением.
Приготовление растворов.
Строительные растворы для кладочных и штукатурных работ приготовляют на передвижных или стационарных растворосмесительных установках. Стационарные установки называются растворными узлами.
Различают установки циклического и непрерывного действия. Имеются стационарные крупные автоматизированные узлы с производительностью до 90 тыс. м3
раствора в год и передвижные установки производительностью до 15 тыс. м3
в год. Созданы также заводы с производительностью до 200 тыс. м3
в год.
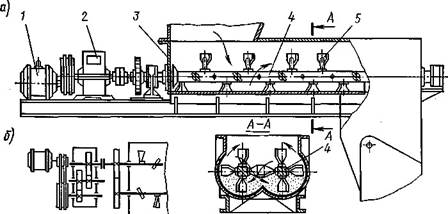
Рис. 10.8. Бетоносмеситель (растворосмеситель) непрерывного действия с принудительным перемешиванием и корытообразным барабаном:
а
— общий вид; б
— кинематическая схема привода
Технологический процесс приготовления растворов состоит из подачи сухих компонентов из штабелей или транспортных средств в
бункера; подачи их к дозаторам; дозирования компонентов и одновременно воды; подачи в смесительные устройства; перемешивания; выгрузки готового раствора.
Основным оборудованием растворосмесительных установок являются растворосмесители, дозирующие устройства, расходные бункера, транспортирующие устройства, узлы системы управления.
Растворы перемешиваются в растворосмесителях. Они бывают циклического и непрерывного действия. На рис. 10.9 показана схема передвижной растворосмесительнои установки. Главным параметром растворосмесителей является объем готового замеса в литрах.
Принятый типаж включает следующий ряд растворосмесителей: 30, 65, 125, 250, 750 и 1200 л готового замеса, что соответствует емкости по выгрузке 40, 80, 150, 325, 1000 и 1500 л.
Растворосмесители с емкостью загрузки до 325 л делают передвижными, а остальные — стационарными. Кинематическая схема одного из растворосмесителей циклического действия показана на рис. 10.10.
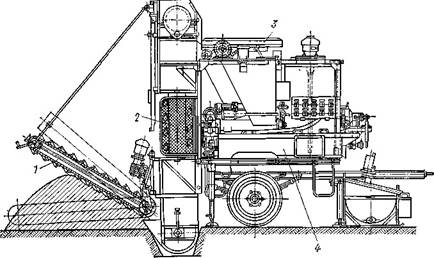
Рис. 10.9. Передвижная автоматизированная растворосмесительная установка:
/ — скребковый питатель; 2 —
ковшовый элеватор для подачи песка; 3
— грохот для просеивания песка; 4
— растворосмеситель непрерывного действия
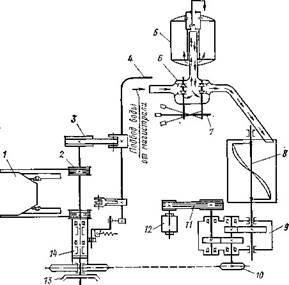
Рис. 10.10. Кинематическая схема растворосмесителя:
/ — ковш; 2
— барабан; 3
— тормоз ленточный; 4 —
рычаг управления; 5
— бак вододозировочный; 6
— кран трехходовой; 7 — рукоятка крана; 8
— лопастной вал; 9
— редуктор; 10
— звездочка; // — клиноременная передача; 12
— электродвигатель; 13
— конус фрикционный; 14
— кулачок включения фрикциона
Привод лопастного вала осуществляется от электродвигателя через редуктор. От этого же электродвигателя через цепную передачу приводятся в движение барабаны лебедки подъема ковша. Растворосмесители выпускаются с емкостью барабана 150 ¸ 325 м и мощностью 3 ¸ 4 кВт.
Высокое качество раствора обеспечивается при перемешивании в так называемых турбулентных растворосмесителях. Эти растворосмесители выпускаются передвижные с емкостью замеса 65 л и стационарные с объемом замеса 900 и 1800 л.
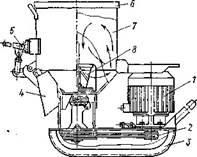
Передвижные растворосмесители применяют при небольшой потребности раствора для отделочных и ремонтных работ. Схема турбулентного смесителя показана на рис. 10.11. Он состоит из электродвигателя /, клиноременной передачи 2,
приводящей в движение ротор 8.
Ротор 8
размещен в нижней части бака 7. Перемешивание приготовляемых растворов происходит за счет интенсивного движения, возникающего под действием центробежных сил. Это движение создается за счет сравнительно большой частоты вращения — 550 об/мин, с которым вращается Рис. 10.11. Турбулентный смеситель ротор 8.
Загрузка этих смесителей производится вручную. При перемешивании бак закрывается крышкой 6.
Выгрузка происходит через лоток 4.
Затвор лотка открывается и закрывается механизмом 5.
Для передвижения смесителя служит рама 3.
Помимо перечисленных смесителей применяется вибросмеситель.
Производительность смесительных машин.
Производительность смесительных машин циклического действия зависит от емкости барабана по загрузке, которая определяется суммой объемов сухих материалов, загружаемых в барабан для одного замеса. При перемешивании мелкие частицы материалов попадают в пустоты между крупными частицами, поэтому смесь уплотняется и объем готовой смеси получается меньше, чем общий объем исходных материалов. Отношение этих объемов характеризуется коэффициентом выхода f
. Экспериментально установлено, что для бетонных смесей f
= 0,65 ¸ 0,7, а для растворов f =
0,75 ¸ 0,85. Число замесов в час
n =
3600 / T
(10.1)
где Т
— время, затрачиваемое на загрузку, перемешивание и выгрузку, с.
Время перемешивания бетонных смесей и растворов зависит от их состава, жесткости, а также размеров и конструкции смесительных машин. Время на загрузку и выгрузку при механизированном способе составляет 30—45 с, а при загрузке и выгрузке вручную — 2—2,5 мин. Часовая производительность
П
= Q
б
fn / 1000
(10.2)
где Q
б
— емкость смесительного барабана по загрузке, л.
Производительность смесительных машин непрерывного действия с принудительным перемешиванием зависит от площади сечения потока смеси в корпусе бетоносмесителя F
и скорости v
движения смеси в направлении продольной оси корпуса бетоносмесителя. Скорость движения смеси v
= Snв
m
где S
— шаг лопастей или шнека, мм; п
в — скорость вращения лопастного вала, об/мин; m — коэффициент трения между смесью, лопастями и стенками барабана.
n
в
= 60Fv.
(10.3)
ДОЗАТОРЫ
Качество приготовления бетонных смесей и растворов зависит не только от качества перемешивания, но и от правильного дозирования компонентов смеси: воды, вяжущего (цемента, извести) и заполнителей (песка, щебня). Точность дозирования должна быть для воды и цемента не ниже ±1%, для остальных заполнителей ±2
—3%. Дозировать можно по объему и по массе. Наиболее правильным является дозирование по массе, так как песок и другие материалы из-за различной влажности и разрыхленное™ будут иметь различную массу в одном и том же объеме.
Дозаторы могут быть с ручным управлением, полуавтоматического и автоматического действия. Последние позволяют создать смесительные установки с центральными постами управления. В полуавтоматических дозаторах впуск взвешиваемого материала и отмеривание необходимой порции производятся автоматически, а выпуск — вручную. В автоматических дозаторах все операции выполняют автоматически с помощью электрической или механической энергии.
Дозирование может быть порционным (цикличным) и непрерывным. Весовые дозаторы циклического действия различны по конструкции, но они имеют емкость для загрузки и дозирования материала, загрузочное и разгрузочное устройства, весовой механизм и механизм управления.
В дозаторах непрерывного действия емкость заменяется транспортирующим устройством, на котором взвешивание производится так, что конвейер все время подает постоянное весовое количество материала.
В объемных дозаторах емкость тарируется так, что объем ее соответствует определенной массе материала. Типичным объемным дозатором является водомерный бачок (рис. 10.12). При подаче воды в бачок по мере его заполнения всплывает поплавок, который управляет клапаном, закрывающим поступление воды. Управление клапаном может быть отрегулировано на различные объемы воды в данном бачке.
На рис. 10.13, а
показана схема весового дозатора для сыпучих материалов. Емкость А
подвешена на кронштейнах к рычагам 1
и 2.
Рис. 10.12. Водомерный бачок дозатора:
/ — труба; 2
— клапан; 3
— стержень клапана; 4
— поплавок
Рычаги под действием массы емкости с материалом приводят в движение систему рычагов, поворачивающихся вокруг шарниров и перемещающихся в направлениях, показанных стрелками. Перемещение рычага 3
и рычага 4,
соединенного с указателем циферблата, уравновешивается грузами, установленными на коромыслах весов 5, 6
и 7.

Рис. 10.13. Схемы автоматических дозаторов:
а
— циклического действия; б
— непрерывного действия: / — электромагнитный вибратор; 2 —
бункер; 3
— лоток; 4
— весовой конвейер; 5
— рычаг весового устройства; 6
— рычаг управления индуктивным датчиком; 7
— уравновешивающий груз; 8
— блок приборов регулирования напряжения
Во многих строительных машинах, где процесс идет непрерывно, например в бетоносмесителях непрерывного действия, дозирование материалов должно происходить непрерывно. Для этой цели используют дозаторы непрерывного действия. Один из таких дозаторов показан на рис. 10.13, б.
Из бункера дозируемый материал поступает на электромагнитный вибропитатель, состоящий из лотка, которому электромагнитным вибратором сообщаются колебательные движения. От питателя материал попадает на весовой конвейер. Количество материала, подаваемого питателем, зависит от величины амплитуды его колебаний; последняя в свою очередь зависит от величины напряжения, которое подается на электромагнитный вибратор. Один конец конвейера подвешен к рычагу весового устройства.
Производительность конвейера зависит от того, сколько на него подается материала от вибропитателя. Если вибропитатель подает больше или меньше материала, чем нужно, то выходит из состояния равновесия весовое устройство, на котором подвешен конвейер, и рычаг весов воздействует на специальное автоматическое устройство, изменяющее напряжение.
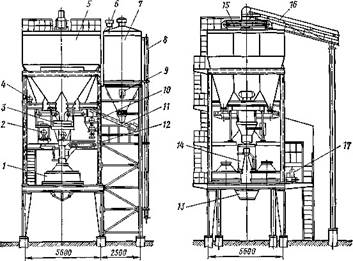
Рис. 10.14. Схема бетонного завода
Значительно эффективнее изготавливать бетон на бетонных заводах. Наиболее рациональная схема бетонного завода и компоновка оборудования на таких заводах показаны на рис. 10.14. На таком заводе установлены два смесителя с объемом 880 л (по загрузке).
Ленточный транспортер 16
перемещает заполнители на поворотный транспортер 15,
который подает их в различные отсеки бункера 5.
Из бункера заполнители поступают в дозатор 3.
На этих установках устанавливаются дозаторы, позволяющие взвешивать 5—6 компонентов. Цемент по трубе 8
перемещается в циклон 7 с патрубком 6.
Циклон оборудован сводообрушителем 9.
Из силоса цемент подается на дозатор 10
винтовым питателем 11,
из которого по ленточному питателю 12
он подается в смеситель / через воронку 14.
Готовая смесь выгружается в бункер 13.
На этих установках вода из водопроводов поступает в бачок 4,
а из бачка в дозатор воды 2.
Установки оборудуются компрессором 17,
воздух от компрессора подается в системы управления.
Структурная схема автоматизации бетонного завода показана на рис. 10.15.
Бункера для цемента, песка и щебня оборудуются датчиками, показывающими предельные уровни заполнения материала. Датчик 1
показывает, что бункера заполнены, а датчик 4
— что материал из бункера израсходован. На транспортере, подающем щебень, установлен датчик 3
толщины слоя на транспортере и датчик 2
скорости ленты. Они позволяют регулировать равномерную подачу. Если датчики в бункерах показывают, что песок или щебень заполнил бункера, то прекращается подача материала и выключаются транспортеры. Затворы бункеров и кран подачи воды открываются и закрываются гидроцилиндрами 5.
На всех дозаторах установлены датчики: сигнализирующий аварийную перегрузку дозатора датчик 6,
датчик контроля разгрузки дозатора 7 и датчик, показывающий величину заданной порции 8.
Открываются и закрываются затворы дозаторов гидроцилиндрами 9.
Из дозаторов составляющие поступают в бункер, из бункера в смеситель 10
и из смесителя в бункер готовой продукции 15.
Затвор бункера 15
управляется гидроцилиндром 16.
Для управления операциями дозирования, перемешивания и выдачи готовой смеси служит «Униблок» 12.
На нем установлены дистанционные указатели 13
работы отдельных систем. Для управления операциями подачи материалов в расходные бункера служит блок «Кактус» 11.
Если автоматика должна обеспечить дистанционное изменение марок раствора и бетона, т. е. дистанционно перестраиваются дозаторы или автоматически производится корректировка марки, то система управления дополняется системами «СУЗИ» 14.
МАШИНЫ ДЛЯ ТРАНСПОРТИРОВАНИЯ БЕТОННЫХ СМЕСЕЙ И РАСТВОРОВ
Для доставки бетонных смесей и растворов к месту укладки применяют бетоновозы, автобетоносмесители, конвейеры, бетононасосы и растворонасосы. Выбор транспортного средства зависит от вида сооружения, расстояния от смесительной установки, объемов и сроков выполнения работ. Основным требованием, предъявляемым к транспортным средствам, является предохранение смеси от расслаивания при перевозке.
Автобетоносмесители
(рис. 10.16) служат для приготовления бетона в процессе транспортирования. В смеситель обычно загружают сухие составляющие. При движении машины они перемешиваются; одновременно к ним подается вода из бачка. Перемешивание составляющих и подача воды начинаются за 10—15 мин до выгрузки смеси. Если транспортируют на расстояние не более 10 км, то автобетоносмеситель можно загружать готовой смесью на бетонных заводах.
Смесительный барабан устанавливается на подрамнике, закрепленном на раме автоприцепа, и приводится во вращение гидродвигателем через редуктор. Питается гидродвигатель от насоса, приводимого в движение от коробки отбора мощности автомобиля. Для загрузки имеется загрузочная воронка, а для раздачи бетонной смеси — разгрузочный лоток.
При разгрузке смесительный барабан наклоняется, для этого подрамник вместе с барабаном поднимается с помощью гидроцилиндра. Масло в гидроцилиндр подается тем же насосом, который направляет масло к гидродвигателю.
Бетононасосы
подают бетон на расстояние до 350 м по горизонтали и на высоту до 40 м. Можно подавать бетон и на большие расстояния, но для этого нужно устанавливать несколько бетононасосов, работающих последовательно.
Бетононасосы рекомендуется применять при выполнении сосредоточенных объемов бетонных работ. Главным параметром этих насосов является призводительность. Выпускаются бетононасосы производительностью 10, 20 и 40 м3
/ч. Соответственно этой производительности бетононасосы целесообразно применять при минимальном объеме бетонных работ 500, 2000 и 5000 м3
. Бетононасосы имеют сравнительно небольшие габариты и массу (3 ¸ 12 т). Недостатком их является то, что размеры заполнителей должны быть не крупнее 70 мм, причем количество заполнителей такого размера должно быть не больше 15% от общего объема заполнителей.
Схема работы бетононасоса показана на рис. 10.17. Бетонная смесь подается лопастным устройством из приемного бункера, в котором она непрерывно перемешивается, к всасывающему клапану цилиндра насоса. После заполнения цилиндра всасывающий клапан закрывается и открывается клапан нагнетания. Бетонная смесь выжимается в бетоновод под давлением поршня, который приводится в движение от электродвигателя кривошипношатунным механизмом. При обратном движении поршня закрывается клапан нагнетания, открывается всасывающий клапан и цикл повторяется.
Основным сопротивлением перемещению бетона по бетоноводу является трение бетона о внутренние стенки трубы. Поэтому перед началом работы через насос и бетоновод необходимо прокачать жирный цементный раствор состава 1 : 2 с осадкой конуса 12—16 см. Перерыв в работе бетононасоса допускается не более 40 мин, при более длительном перерыве рекомендуется через каждые 5 мин сообщать поршню насоса 2—3 двойных качания, иначе насос и бетоновод закупорятся застывшим бетоном. После работы бетононасос следует промыть.
Сопротивление транспортированию бетона по трубам различно при движении по горизонтальным или вертикальным участкам и по коленам.
Производительность (техническая) П
т
бетононасосов зависит от диаметра поршня D,
числа двойных ходов п,
длины хода поршня S
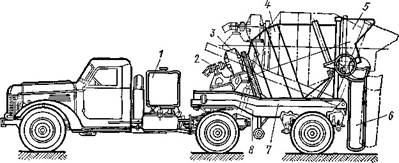
Рис. 10.16. Автобетоносмеситель:
/ — водяной бак; 2
— гидродвигатель привода смесителя; 3
— редуктор;
4
— смесительный барабан; 5
— загрузочная воронка; 6
— раздаточный лоток; 7 — подрамник; 8
— гидроцилиндр
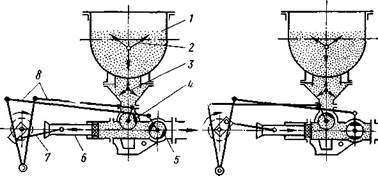
Рис. 10.17. Схема работы бетононасоса:
/ — бункер; 2
— лопастное устройство; 3
— побудитель; 4
— всасывающий клапан; 5 — клапан нагнетания; 6 —
поршень; 7 —
кривошипно-шатунный механизм привода поршня; 8
— рычаги управления клапанами
от степени заполнения рабочей камеры, которая определяется коэффициентом заполнения k
зп
;
он может быть принят равным 0,6—0,9 в зависимости от жесткости бетона и крупности заполнителя.
Для подачи бетона по трубам применяют пневматические бетононасосы, в которых бетон транспортируется по трубам при помощи сжатого воздуха. Резервуар (рис. 10.18) заполняется бетоном, после чего он герметически закрывается и в него подается сжатый воздух под давлением 5—6 ат (0,5— 0,6 МПа). Воздух выдавливает бетон в трубопровод, по которому он направляется к месту укладки. Так как поверхность бетона в резервуаре, на которую давит воздух, значительно больше, чем площадь сечения трубопровода, то давление в трубопроводе превышает 5—6 ат (0,5—0,6 МПа). В месте разгрузки бетонной смеси обычно устанавливается разгрузочный бункер, в котором смесь освобождается от воздуха.
Растворонасосы.
С помощью таких устройств подаются растворы к местам производства кирпичной кладки, штукатурных работ, замоноличивания стыков при монтаже бетонных сооружений. Главным параметром растворонасосов является производительность. Для небольших объемов работ, например ремонтных, рекомендуется применять растворонасосы производительностью до 1 м3
/ч. Для транспортирования растворов на расстояние до 50 м по горизонтали и до 15 м по вертикали целесообразно применять насосы производительностью 2 м3
/ч, а на расстояние 100—125 м по горизонтали и 30—40 м по вертикали — производительностью 4 и 6 м3
/ч.
По способу воздействия плунжера на раствор растворонасосы можно разделить на: диафрагмовые, в которых действие плунжера
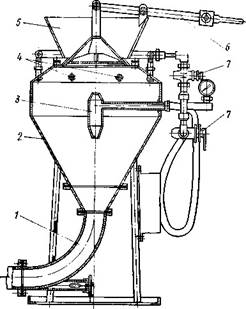
Рис. 10.18. Пневматический бетононасос:
/ — выходное колено; 2
— корпус; 3
— центральное сопло; 4
— верхние сопла; 5 —
загрузочная воронка; 6
— рычаг управления заслонкой загрузки; 7 — краны управления подачи воздуха к соплам
на раствор через промежуточную жидкость, что предохраняет плунжер от абразивного износа; без-диафрагмовые, в которых плунжер соприкасается с раствором.
В основном применяют диафрагмовые растворонасосы. Плунжер насоса (рис. 10.19) приводится в движение электродвигателем через зубчатую передачу и кривошипный механизм. Перемещение плунжера в камере, заполненной водой, создает давление в камере, в результате чего выгибается диафрагма, установленная между рабочей полостью насоса и камерой с водой. Находящийся в рабочей камере раствор приподнимает верхний шаровой клапан и раствор поступает в воздушный колпак. При обратном ходе плунжера диафрагма выгибается в сторону водяной камеры. В рабочей камере создается вакуум, верхний клапан закрывает отверстие под действием собственной массы, нижний клапан открывается под действием вакуума и раствор из бункера поступает в рабочую камеру. Подача раствора из рабочей камеры в воздушный колпак происходит порциями, а из колпака в трубопровод раствор подается непрерывно, так как объем воздушного колпака значительно больше, чем порция, подаваемая за один ход плунжера.
В бездиафрагмовых растворонасосах раствор подается в трубопровод непосредственно плунжером насоса. В этих насосах цилиндр имеет сменную рубашку, которая заменяется по мере износа. Достоинством этих насосов является возможность перекачивания густых растворов с осадкой конуса 3— 6 см, в то время как диафрагмовые позволяют перекачивать растворы с осадкой конуса 8—10 см.Энергоемкость растворонасосов составляет 1,25— 1,5 кВт*ч на 1 м* раствора.
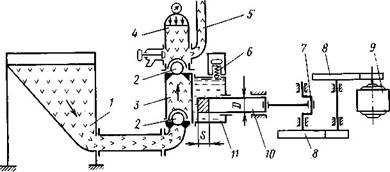
Рис. 10.19. Схема диафрагмового растворонасоса с шаровыми клапанами:
/ _ бункер; 2 —
шаровые клапаны; 3
— резиновая диафрагма; 4
— воздушный колпак; 5 —
трубопровод; 6 —
предохранительный клапан; 7 —
кривошипно-шатунный механизм; 8
— зубчатая передача; 9 —
электродвигатель; 10
— плунжер; // — корпус
Производительность растворонасосов
П
= 60*pD
2
/4 * Sn
h, (10.4)
где п
— число двойных ходов штока; h — коэффициент использования рабочего объема, h = 0,5 ¸ 0,75; D
и 5 см. на рис. 10.19.
ОБОРУДОВАНИЕ ДЛЯ ИЗГОТОВЛЕНИЯ АРМАТУРЫ
На заводы железобетонных изделий и на полигоны арматурная сталь диаметром 2 ¸ 14 мм поступаете виде мотков массой 50 ¸ 200 кг, а диаметром свыше 14 мм — в прутках длиной 6 ¸ 12 м. Для изготовления арматуры сталь, поступающую в мотках, подвергают размотке, очистке, правке, упрочнению (в отдельных случаях), резке и иногда гибке. Сталь, поступающую в прутках, очищают, в некоторых случаях упрочняют и подвергают гибке.
Схема технологического процесса заготовки арматурных стержней из мотков приведена на рис. 10.20.
Станки для правки и резки.
Проволоку / пропускают через вращающийся барабан 2
с радиально расположенными плашками 3,
смещенными относительно оси барабана. При вращении барабана проволока протягивается через плашки 3,
изгибается поочередно в различных плоскостях, благодаря чему выпрямляется и дополнительно очищается от окалины и грязи. За барабаном установлены несколько пар роликов 4,
между которыми проходит выпрямленная проволока. При вращении этих роликов зажатая между ними проволока вытягивается из барабана и подается к двум роликам 5,
на которых закреплены ножи, отрезающие проволоку. Вращение этих роликов с ножами включается периодически после того, как проволока прошла
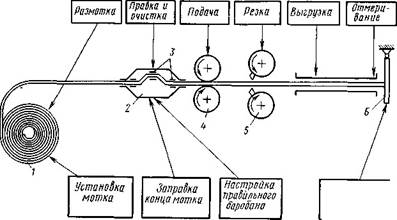
Рис. 10.20. Схема заготовки арматуры:
/ — бухта проволоки; 2 —
правильный барабан; 3
— плашки; 4
— ролики, протягивающие проволоку; 5
— ролики с ножами для отрезания проволоки; 6
— упор с выключателем ножей
между роликами расстояние, соответствующее заданной длине прутка /. Когда конец проволоки достигает упора 6
и нажимает на него, ролики с ножами начинают вращаться. Скорость протягивания проволоки в этих станках достигает 1,5 м/с, частота вращения барабана 1800—2000 об/мин, мощность привода составляет 4—7 кВт.
Производительность станка
Q = 60
pDnq
(10.5)
где D
—диаметр тянущих роликов; п
— частота вращения, об/мин; q
—
масса 1 м длины арматурной стали, т.
Диаметр проволоки, которая может правиться на станках, работающих по этому принципу, составляет 7 ¸ 14 мм. Расстояние между

Рис. 10.21. Принцнпиальая схема станка для гибки арматуры
роликами, соответствующее диаметру проволоки, регулируется в радиальном направлении винтовым устройством.
Станки для гибки арматуры.
Гибка стержней арматуры производится на станках различной конструкции, но по одной принципиальной схеме (рис. 10.21). На вращающемся диске 2
вертикально закреплены центральныи палец 3,
вокруг которого загибается пруток и диаметр которого равен радиусу изгиба, и гибочный ролик 4,
расположенный на некотором расстоянии от центра. Вне диска закреплен упорный ролик /. Проволока пропускается между центральным пальцем, гибочным роликом и упорным роликом. При вращении диска пруток упирается в упорный ролик, а гибочный ролик загибает его вокруг центрального пальца. Для гибки арматуры больших диаметров одного гибочного ролика недостаточно, в этих случаях устанавливают большее количество роликов. Станки выпускают с комплектами сменных частей, в которые входят диски с пальцами и роликами для гнутья стержней диаметром до 20 мм.
В станках для гнутья стержней диаметром до 90 мм имеется диск для гнутья арматуры диаметром до 40 мм и диск для гнутья арматуры диаметром до 90 мм. Привод второго диска осуществляется при помощи дополнительной зубчатой передачи, благодаря которой частота вращения этого диска значительно меньше, чем первого диска. Поэтому окружное усилие на изгибающих роликах значительно больше, что и необходимо для гнутья стержней больших диаметров. Мощность этих станков достигает 10 кВт.
Производительность станков для гибки зависит от частоты вращения рабочего вала, которая для гнутья арматуры диаметром до 10 мм составляет 14 об/мин, диаметром 12 +
14 мм — 7—7,5 об/мин, диаметром 19 ¸ 40 мм —
3,5 об/мин, диаметром 40 ¸ 90 мм — 0,5— 0,6 об/мин. Для гнутья арматурных каркасов, сварных сеток применяют специальные станки. Сетку укладывают на стол станка так, чтобы со стола свешивалась та часть, которая должна быть отогнута. Изгибается сетка при помощи прижимной траверсы и гибочной балки. Чтобы загнуть второй край, сетку вынимают и укладывают на стол другой стороной. На таких станках можно гнуть сетки длиной до 3,5 м. Наибольший угол отгиба 105°, число отгибов в 1 ч до 100. Имеются станки, позволяющие одновременно отгибать оба края сетки; они работают по тому же принципу.
ОБОРУДОВАНИЕ ДЛЯ ПРЕДВАРИТЕЛЬНОГО НАТЯЖЕНИЯ АРМАТУРЫ
Армирование при изготовлении предварительно напряженных железобетонных изделий производится двумя способами: с помощью отдельных стержней, проволок или пучков, которые натягиваются на упоры форм или стендов, или с помощью непрерывной нити проволоки, которая в напряженном состоянии наматывается на упоры форм или стендов (по этому способу армируются трубы, стойки и им подобные детали).
Существует два способа передачи натяжения арматуры на бетон. По одному способу арматура натягивается до затвердения бетона, и усилие натяжения воспринимается поддоном, формой или упорами стенда. После затвердения бетона усилие натяжения передается с инвентарных конструкций на бетон. По другому способу вначале изготовляется изделие, которое затем обжимается напряженной арматурой.
Установка для натяжения арматуры
в формах показана на рис. 10.22. В форму перед укладкой бетона закладывают арматуру. На одном конце формы ее закрепляют зажимами, упирающимися в борт формы. Другой конец арматуры, зажатый в захвате, прикрепляют к штоку гидродомкрата. Домкрат закрепляют в стойке, служащей упором.
Питание гидродомкрата осуществляется гидронасосом, установленным на тележке. При подаче масла в цилиндр шток перемещается вместе с захватом и производит натяжение арматуры. После натяжения арматуру закрепляют зажимами со стороны домкрата так, что усилия от натяжения передаются на борт формы. Затем гидродомкрат освобождают и переносят на следующий стержень арматуры или на другую форму.
Усилие, развиваемое гидродомкратом,
P = 0,65
sв
Fn
h
(10.6)
где sв
— предел прочности стали при растяжении, кгс/см2
(Па); F
— площадь сечения проволоки, см2
(мм2
); п
— количество проволок в пакете; h — КПД гидродомкрата, равный 0,95—0,98.
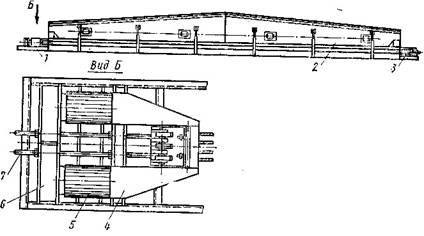
Рис. 10.22. Установка для натяжения арматуры в формах:
/ — натяжное устройство; 2
— форма; 3
— упор; 4
— упорная траверса; 5 —
домкрат; 6
— подвижная траверса; 7
— винты-фиксаторы
Если изделие изготовляют стендовым способом и одновременно формуют большое количество изделий, то принцип натяжения арматуры остается тот же. Ввиду того что стенды могут иметь длину до 250 м, проволока, как правило, укладывается при помощи специальных тележек. Натягивается арматура при помощи мощных гидродомкратов.
После твердения бетона арматуру натягивают переносными гидравлическими домкратами. Домкраты для натяжения стержневой арматуры отличаются по конструкции от домкратов для натяжения пучковой арматуры.
Гидродомкрат для натяжения стержней
показан на рис. 10.23. На конце арматурного стержня нарезается резьба, на которую навинчивается гайка 3
домкрата. Она соединена со штоком 4.
Впереди цилиндра 5 домкрата помещается упорная стойка 2
и опорная плита /. Перед натяжением гайка вместе со штоком находится справа. При подаче масла в цилиндр 5
поршень 6
и шток 4
перемещаются влево и натягивают арматуру. Домкрат через стойку и рамы упирается в железобетонную конструкцию. Масло подается через штуцер 7.
Наиболее характерным примером непрерывного армирования является навивка арматурной проволоки на трубы с предварительным напряжением.
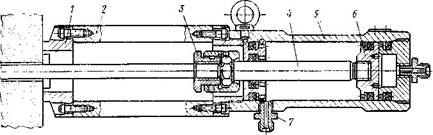
Рис. 10.23. Схема гидродомкрата для натяжения стержней арматуры
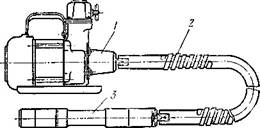
Рис. 10.24. Глубинный вибровозбудитель с гибким валом
Для уплотнения бетона в монолитных конструкциях, а также при изготовлении некоторых видов бетонных и железобетонных изделий в формах широко применяют погружаемые в бетон вибровозбудители, называемые глубинными. Их делают в основном планетарными. Главным достоинством этих вибровозбудителей является то, что дебалансный вал не вращается в подшипниках, что значительно повышает КПД вибровозбудителей и увеличивает их ресурс работы, так как их подшипники быстро выходят из строя.
Глубинные электровиб-ровозбудители выпускаются с гибким валом, со встроенным высокочастотным электродвигателем и пневматические.
Глубинный вибровозбудитель с гибким валом
(рис. 10.24) состоит из приводного электродвигателя
1,
гибкого вала 2
и вибронаконечника 3.
Вибронаконечники выполняют двух типов: с обкаткой бегунка-дебаланса по коническому сердечнику (рис. 10.25, а),
неподвижно закрепленному в корпусе (вибровозбудители с внутренней обкаткой); с обкаткой бегунка-дебаланса по беговой дорожке на конической втулке (рис. 10.25, б),
неподвижно закрепленной в корпусе
(вибровозбудители с наружной обкаткой).
Вибронаконечник с обкаткой бегунка-дебаланса по коническому сердечнику
состоит из корпуса с массивным дном. В дно корпуса запрессован конический сердечник, по которому при работе вибровозбудителя обкатывается бегунок-дебаланс. Последний соединяется со шпинделем упругой муфтой. На конце шпинделя имеется хвостовик, который соединяется с гибким валом.
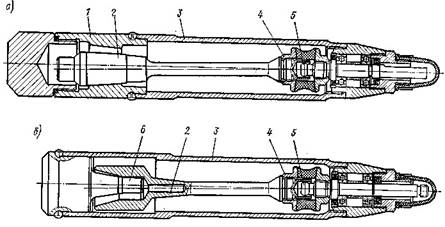
Рис. 10.25. Вибронаконечники: / — конусная втулка; 2
— бегунок; 3
— корпус; 4
— резинометаллическая муфта; 5
— шпиндель; 6
— сердечник
Ручные глубинные вибровозбудители со встроенным высокочастотным электродвигателем выполняются диаметром 50, 75, 100 мм с частотой колебаний 11000 в минуту. Возмущающая сила соответственно равна 2500, 5500 и 12000 Н, а мощность 0,27; 0,8; 1,5 кВт. Эти вибровозбудители работают при напряжении 36 В, следовательно, для их
Рис.10.26. Поверхностный площадочный Рис.10.27. Схема работы виброрейки вибровозбудитель
эксплуатации необходимы понижающие трансформаторные преобразователи частоты тока. Это значительно усложняет их эксплуатацию. Пневматические глубинные ручные вибровозбудители выполняют с наружным диаметром 34, 50, 75 и ПО мм. Работают они при давлении воздуха 4—6 кгс/ см2
(0,4—0,6 МПа) с частотой колебаний 8—18 тыс. в минуту, возмущающая сила соответственно равна 1,3, 5, 7 и 20 кН, а расход воздуха 0,5 ¸ 1,5 м3
/мин. Масса этих вибровозбудителей колеблется от 35 до 200 кг. Металлоемкость этих вибровозбудителей в 1,5 раза меньше, чем электрических. Достоинства и недостатки этих машин те же, что и всех машин с электрическим приводом.
Поверхностные вибровозбудители
применяют при бетонировании полов, плит перекрытий, дорожных покрытий.
На рис. 10.26 показан площадочный вибровозбудитель. На металлической площадке 2
закреплен вибровозбудитель 1.
Передвижение производится вручную с помощью двух рукояток 3.
Для бетонирования широких полос до 4 м применяют виброрейки (рис. 10.27). На рейке 2
устанавливается один или несколько вибровозбудителей 1.
Рейка перемещается по двум бортовым доскам 4
двумя рабочими за гибкие петли 3.
ОБОРУДОВАНИЯ ДЛЯ УПЛОТНЕНИЯ БЕТОННОЙ СМЕСИ И ФОРМОВАНИЯ ИЗДЕЛИЙ
Бетонную смесь уплотняют вибрированием, вибропрокатом, виброштампованием, прессованием, центрифугированием. При уплотнении вибрированием бетонной смеси сообщается вибрация от вибровозбудителей, погружаемых в бетон, или вибрация, передаваемая через форму от вибростола или виброплощадки. Степень уплотнения зависит от физикомеханических свойств бетона, формы вибрируемого изделия, амплитуды и частоты колебаний.
Экспериментально установлено, что для уплотнения необходимы определенные величины амплитуд и частот колебаний, ниже которых уплотнение не происходит. С увеличением амплитуд и частот степень уплотнения повышается. Значительно влияет на уплотнение характер колебаний (направленные или ненаправленные колебания).
Кроме того, если одновременно с вибрированием изделие подвергать давлению, то степень уплотнения также возрастает. Если уплотняют только давлением без вибрирования, то для получения того же эффекта удельное давление на бетон должно быть порядка 50—70 кгс/см2
(5—7 МПа).
Для прессования изделий с большой поверхностью требуются мощные прессы. Виброштампование представляет собой сочетание вибрирования с прессованием. Вибропрокат также сочетает в себе метод прессования и вибрирования, но этот процесс является непрерывным и, следовательно, более производительным.
Центрифугирование также можно отнести к прессованию, но здесь уплотнение происходит под действием центробежных сил.
Виброплощадки.
Это один из основных видов оборудования для уплотнения бетона при изготовлении бетонных и железобетонных деталей.
На рис. 10.28 приводятся схемы основных типов виброплощадок. Выбор виброплощадки зависит от формы и размеров изделий, а также от жесткости бетонной смеси.
Различают виброплощадки малой грузоподъемности (до 1 т), средней (1
¸ 5 т) и большой (5 ¸ 20 т). На виброплощадках устанавливают механические (дебалансные) и электромагнитные вибровозбудители, делаются попытки применить вибровозбудители пневматические и гидравлические. Для крепления форм к виброплощадке применяют механические, электромагнитные, гидравлические пневматические приспособления.
Рис. 10.28. Схемы виброплощадок
Пружины виброплощадок подбирают так, чтобы их осадка под действием статической нагрузки была в 20—30 раз больше, чем расчетная амплитуда колебаний, а суммарный зазор между витками при заполненной бетонной смесью форме был больше, чем амплитуда колебаний площадки. Пружины должны быть отрегулированы так,чтобы в процессе работы осадка была равномерной, иначе в различных участках площадки колебания будут неравномерными и, следовательно, уплотнение бетонной смеси в форме получится также неравномерное.
Рис. 10.29. Схема стенда для изготовления пустотелых панелей
вкладыши 4,
прикрепленные к траверсе S
при помощи лебедки 2,
которая приводится в движение электродвигателем 1
через редуктор. Вибровкладыши входят в отверстия в поперечных бортах формы. После укладки и уплотнения бетонной смеси вкладыши извлекаются с помощью той же лебедки. Вибровкладыши представляют собой трубу круглого или овального сечения, внутри которой помещены вибровозбудители. Электродвигатель помещается снаружи или внутри трубы. На конце трубы имеется конусный наконечник.
Виброштампующие машины.
Такие машины применяют для изготовления панелей покрытий, часторебристых панелей, лестничных маршей, балок и др.
Основной частью машины является виброштамп, состоящий из рамы, на которой сверху прикреплены вибровозбудители, а снизу штамп (пуансон), образующий конфигурацию штампуемого изделия. Виброштамп может быть переносным. В этом случае он подвешивается на крюке электротали или крана и подается к форме с уложенной в нее бетонной смесью. Виброштамп с включенными вибровозбудителями опускают на форму до соприкосновения его рамы с краями формы. После отключения вибровозбудителей виброштамп поднимают и переносят на следующую форму. На виброштампах обычно устанавливаются вибровозбудители с направленными колебаниями. Мощность вибровозбудителей, их кинетический момент зависят от размеров и конструкции штампуемых изделий.
Для вибрирования изделий значительной массы и габарита соединяют несколько виброплощадок. Такие устройства называют вибростолами.
Широкое применение имеют пустотелые железобетонные конструкции.
На рис. 10.29 показан стенд для изготовления пустотелых панелей.
КЛАССИФИКАЦИЯ РУЧНЫХ МАШИН
Ручной машиной (механизированным инструментом) называется машина с двигателем, масса которой при работе полностью или частично воспринимается руками оператора. Главное рабочее движение (рабочего органа) осуществляется соответствующим двигателем, а вспомогательное движение (подача) и управление — вручную. Ручные машины должны иметь минимально возможную массу и габариты. От этих показателей в значительной степени зависит утомляемость оператора (рабочего), удобство подхода к месту выполнения операции, а следовательно, и производительность.
Компоновка машины, форма и расположение рабочих рукоятей, уравновешивание машины должны быть такими, чтобы достигалось наибольшее удобство работы.
Ручные машины, работающие на строительных и монтажных работах, должны обладать высокой долговечностью и надежностью, так как в условиях строительства трудно организовать ремонт машин, а эксплуатация их происходит часто в сложных условиях. К ручным машинам предъявляются также особые требования безопасности работы. Внешние очертания машин должны быть такими, чтобы исключалась возможность механических травм, следует предусматривать предохранительные устройства, исключающие возможность поражения оператора электрическим током. Необходимо обеспечивать шумо- и вибробезопасность, соответствующие санитарным нормам.
Наиболее эффективно применение ручных машин на строительномонтажных работах, если машины универсальны и способны удовлетворять различным условиям эксплуатации.


Рис. 11.
Схемы принципа действия ручных машин
Ручные машины классифицируют по назначению и области применения, виду потребляемой энергии и привода, принципу действия, конструктивному исполнению и режиму работы.
По назначению и области применения
ручные машины подразделяют на машины: 1) общего применения (сверлильные, шлифовальные, фрезерные); их используют для выполнения наиболее массовых операций и для работы по различным материалам; 2) для обработки металла (развальцовочные, развертывающие, зенковальные, ножницы, опиловочные, шаберы, рубильные молотки, пучковые молотки); 3) для обработки дерева (рубанки, пилы, долбежники); 4) для обработки каменных материалов и грунта (молотки, перфораторы, ломы, трамбовки); 5) для сборочных работ (резьбонарезные, резьбозавертывающие, клепальные молотки, скобозабивные, гвоздезабивные). Из них резьбозавертывающие делятся на гайковерты, шуруповерты, шпильковерты, муфтоверты; 6) для бетонных работ (бучарды); 7) для отделочных работ (затирочные, краскопульты).
По виду потребляемой энергии и приводу
ручные машины могут быть электрические, пневматические, гидравлические, с двигателями внутреннего сгорания, пиротехнические.
По принципу действия
различают машины, передающие крутящий момент рабочему органу непрерывно (непрерывно-силовые, рис. 11.1 ,а),
и машины, в которых передача энергии привода на обрабатываемый объект осуществляется в прерывисто-импульсном режиме — ударном (импульсносиловые). Машины импульсно-силовые подразделяют на ударные (рис. 11.1,6), ударно-поворотные (рис. 11.1, б) и ударно-вращательные (рис. 11.1 г, д).
К непрерывно-силовым машинам относятся сверлильные, шлифовальные, фрезерные машины, дисковые пилы; к импульсно-силовым — молотки, перфораторы, гайковерты, вырубные ножницы. Все импульсносиловые машины делятся по принципу воздействия на рабочий орган на механические (компрессионно-вакуумные, пружинно-воздушные, пружинные) и фугальные (электромагнитные, электродинамические и пневматические).
По режиму работы ручные машины делят на легкие массой до 1,5 кг, средние — до 8 кг и тяжелые — свыше 8 кг; часто для работы с машинами средней и большой массы применяют подвески, которые частично или полностью воспринимают на себя массу ручной машины; по мощности ручные машины делят на машины малой мощности до 0,2 кВт, средней — до 1,5 кВт и большой — свыше 1,5 кВт.
Так же как и в строительных машинах, при проектировании ручных машин необходимо разрабатывать их в соответствии с типоразмерными рядами. Однако в этом случае при составлении ряда по главному параметру машины необходимо учитывать массу получаемых машин.
Типоразмерный ряд каждой из ручных машин выбирают в зависимости от основной характеристики выполняемого процесса, например ряд машин для сверления должен выбираться таким образом, чтобы можно было сверлить отверстия во всем диапазоне необходимых диаметров, причем количество машин было бы минимальным. Типоразмерные ряды, шаг ряда, определение главного параметра находятся в стадии разработки.
Ниже приводится классификация основных ручных машин, применяемых на строительных и монтажных работах, и виды операций, которые этими машинами могут выполняться.
УСТРОЙСТВО РУЧНЫХ МАШИН
Все ручные машины состоят из привода, механизма передачи, механизма включения и рабочего органа.
Приводы.
В качестве привода ручных машин применяют: электро-, пневмо-, гидродвигатели, двигатели внутреннего сгорания, пороховые двигатели.
Основными требованиями, предъявляемыми к приводам ручных машин, являются: удельный вес, малая металлоемкость, т. е. масса, приходящаяся на единицу мощности; бесшумность в работе; возможность использования общих источников питания; безопасность. Самыми распространенными приводами в ручных машинах являются электро- и пневмодвигатели. В современных приводах металлоемкость для машин малой и средней мощности составляет: для электродвигателей 0,5—0,6 кг на 100 Вт, для пневмодвигателей 0,2—0,25 кг на 100 Вт.
Электродвигатели,
применяемые в качестве привода ручных машин, по конструкции, роду и частоте тока можно подразделить на три группы: 1) коллекторные однофазные с частотой тока 50 Гц, типа КН; 2) трехфазные асинхронные с короткозамкнутым ротором, частотой тока 50 Гц, типа АН; 3) трехфазные асинхронные с коротко-замкнутым ротором, частотой тока 200 Гц, типа АП.
О д н о ф а з н ы е к о л л е к т о р н ы е д в и г а т е л и
КН
универсальны, так как могут работать от трехфазной промышленной или однофазной осветительной сети как переменного, так и постоянного тока. Их металлоемкость в 1,5 раза меньше, чем у трехфазных асинхронных двигателей переменного тока с короткозамкнутым ротором.
Эти двигатели применяют для сверлильных, шлифовальных машин и гайковертов малой и средней мощности. В последнее время эти двигатели начали выпускать с двойной изоляцией, что значительно улучшает безопасность их применения.
Т р е х ф а з н ы е а с и н х р о н н ы е э л е к т р о д в и г а т е л и
АН с короткозамкнутым ротором, с частотой тока 50 Гц надежны в работе, просты в изготовлении, могут включаться в промышленные трехфазные сети. Недостатками этих двигателей является большая металлоемкость и электроопасность в работе. Они применяются для машин средней и большой мощности.
Т р е х ф а з н ы е а с и н х р о н н ы е э л е к т р о д в и г а т е л и
АП с короткозамкнутым ротором, с частотой тока 200 Гц принято называть электродвигателями повышенной частоты. Они надежны в работе, просты в изготовлении, имеют меньшую металлоемкость, чем двигатели АН, но для них требуются специальные преобразователи частоты тока; последние же, как правило, имеют в 4—5 раз большую массу, чем у самой машины, громоздки и неудобны в эксплуатации, их применяют для машин большой мощности (свыше 2 кВт).
Все электрические машины делят на три класса защиты от поражения током: 1) машины на номинальное напряжение свыше 42 В, у которых хотя бы одна металлическая деталь, доступная для прикосновения, отделена от частей, находящихся под напряжением, только рабочей изоляцией; 2) машины на номинальное напряжение свыше 32 В, у которых все металлические детали, доступные для прикосновения, отделены от частей, находящихся под напряжением, двойной или усиленной изоляцией; 3) машины на номинальное напряжение до 42 В, питающиеся от автономных источников либо от трансформатора (преобразователя) с раздельными обмотками.
Пневматические двигатели,
применяемые в качестве привода ручных машин, подразделяют на пять основных групп: 1) со свободным поршнем; 2) поршневые (рис. 11.3, а); 3) ротационные (рис. 11.3, б
);
4) шестеренчатые (рис. 11.3, в
);
5) турбинные двигатели (рис. 11.3, г
).
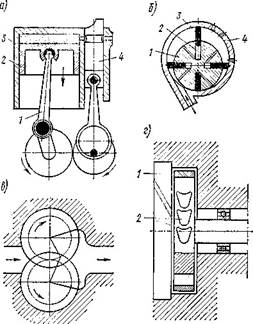
Рис. 11.3. Схемы пневматических двигателей
В д в и г а т е л я х со с в о б о д н ы м п е р е м е щ е н и е м п о р ш н я
энергия сжатого воздуха преобразуется в кинетическую энергию бойка, который играет роль поршня, свободно перемещающегося внутри цилиндра. Рабочее движение совершается бойком в одну сторону, при этом наносится удар по хвостовику инструмента. Холостой ход осуществляется при обратном направлении и обеспечивается золотником. Такие двигатели применяют преимущественно в клепальных, рубильных, отбойных и пучковых молотках.
Основными параметрами, характеризующими машины ударного действия, являются работа одного удара и количество ударов в минуту. Работа одного удара А
(кгс*м или кН*м) зависит: от давления воздуха в сети р
, кгс /см2
(МПа); конструктивного хода поршня (ударника) Sкон
, м, представляющего собой разность между длиной полости за вычетом длины хвостовика рабочего органа и длиной поршня; площади F
поперечного сечения ствола, по которому движется поршень.
A = k1
p
FS
кон
(11.1)
где k1
— коэффициент потерь энергии, учитывающий степень наполнения цилиндра сжатым воздухом и механические потери при оптимальных режимах работы молотков. Этот коэффициент для клепальных молотков равен 0,5 ¸ 0,55.
Количество ударов в минуту зависит от продолжительности каждого удара, которая в свою очередь определяется скоростью перемещения поршня при рабочем ходе и длиной его пути.
Средняя скорость перемещения может быть определена по зависимости
v = pF / m
п
(11.2)
где m
п
— масса поршня.
Скорость холостого хода поршня меньше скорости рабочего хода, следовательно, время холостого хода больше. Обычно время холостого хода составляет 1,2 ¸ 1,6 времени рабочего хода. Таким образом, общее время одного удара
Т
= (2,2
¸ 2,6)t
(11.3)
Число ударов молотка в минуту
n
= 1/T
(11.4)
Для сравнительных оценок ударных машин принято также пользоваться таким параметром, как мощность молотка в л. с. Это сугубо относительная величина. Она определяется по зависимости N
= An
/ (60*75).
П н е в м а т и ч е с к и е п о р ш н е в ы е д в и г а т е л и
имеют
высокий КПД при сравнительно малых оборотах. В этих двигателях возможна плавная регулировка числа оборотов; они имеют относительно небольшую утечку сжатого воздуха. Преобразование движения осуществляют кривошипно-шатунным механизмом, кулисными и кулачковыми механизмами различных типов.
Схема пневматического поршневого двигателя показана на рис. 11.3, а.
Он состоит из цилиндра 3,
в котором перемещается поршень 2,
связанный с кривошипно-шатунным механизмом /. В корпусе цилиндра имеется золотниковый распределитель 4.
Мощность поршневых двигателей, применяемых в ручных машинах, составляет 0,5— 5 л. с, частота вращения 400—2000 об/мин. Наиболее широкое применение поршневые двигатели получили в клепальных скобах безударного действия.
Ш е с т е р е н ч а т ы е д в и г а т е л и
(см. рис. 11.3, е) просты по конструкции, легко переносят перегрузки, имеют меньшие по сравнению с поршневыми габариты, а также большой срок службы. Существенными недостатками их являются: повышенный расход воздуха на единицу мощности, значительный шум при работе и большая масса (на 1 л. с. мощности двигателя приходится до 14 кг массы).
В ручных машинах шестеренчатые двигатели практически не применяют, так как они уступают по своим показателям ротационным пневматическим двигателям.
Р о т а ц и о н н ы е д в и г а т е л и
являются основным типом привода большинства ручных машин пневматического действия. Они имеют сравнительно простое устройство и работают очень плавно. Как правило, ротационные двигатели в ручных машинах имеют частоту вращения 10—15 тыс. об/мин.
Такой двигатель (см. 11.3, б) состоит из ротора 1,
в котором ра-диально нарезаны пазы 2.
В эти пазы вставляются плоские лопатки 3,
которые могут перемещаться в радиальном направлении. Ротор с лопатками устанавливается в статоре 4
в виде пустотелого цилиндра. Ось ротора эксцентрично смещена относительно оси статора. Для привода ротора в движение воздух через отверстие в статоре подается в ту часть ротора, где зазор между статором и ротором наименьший. Воздух давит на лопатку и приводит во вращение ротор.
Мощность, развиваемая пневматическим ротационным двигателем, зависит: от работы, совершаемой одной лопаткой за один оборот ротора, количества лопаток, числа оборотов ротора, КПД, а также от коэффициента, учитывающего влияние толщины лопатки.
Т у р б и н н ы е д в и г а т е л и
применяют в основном в
высокооборотных шлифовальных машинах небольших мощностей. Они обладают высоким КПД. У таких двигателей частота вращения достигает 60—100 тыс. об/мин; мощность составляет 0,01 ¸ 0,4 л. с.
Схема работы такого двигателя показана на рис. 11.3, г.
Ротор двигателя выполнен в виде диска с прорезными по наружной поверхности каналами, образующими лопасти. Под углом к плоскости ротора через два диаметрально расположенных сопла поступает сжатый воздух, который, действуя на лопатки ротора, сообщает ему вращательное движение. Из-за отсутствия износа рабочего колеса 2
соплового аппарата / срок службы этих двигателей значительно выше, чем у других пневматических двигателей.
Расход воздуха в турбинках по сравнению с ротационными двигателями в три раза меньше. Например, у ротационного двигателя мощностью 0,25 л.
с. расход воздуха составляет 0,75 м3
/мин, а у турбинки той же мощности —
0,25 м3
/мин. Однако изготовление турбинных двигателей значительно сложней, чем ротационных. Кроме того, в них имеется трудность реверсирования.
В последнее время для привода отдельных ручных машин применяют газовые турбинки, в которых к лопастям ротора подводится не воздух, а газ от сгорания топлива, подаваемого в отдельную камеру сгорания. Такие турбинки могут развивать мощность во много раз больше, чем воздушные, при одинаковых габаритах и массе. Эти турбинки делаются тоже высокооборотными.
Несмотря на большие достоинства газовых и воздушных турбинок, их применение пока ограничено, так как вращающиеся рабочие органы ручных машин должны делать, как правило, от 10 до несколько сотен оборотов в минуту (за исключением шлифовальных машин). Для того чтобы получить такую частоту вращения при наличии газовой или воздушной турбинки, необходимы редукторы с большими передаточными числами. Такие редукторы получаются очень сложными и тяжелыми.
Достоинством пневмодвигателей является их устойчивая работа в ручных машинах не только в непрерывно-силовых, но и в импульсносиловых, а также значительно меньшая масса по сравнению с электрическими. Однако пневмодвигатели имеют и крупные недостатки. Их КПД сравнительно мал — в 5—6 раз ниже, чем у электродвигателей.
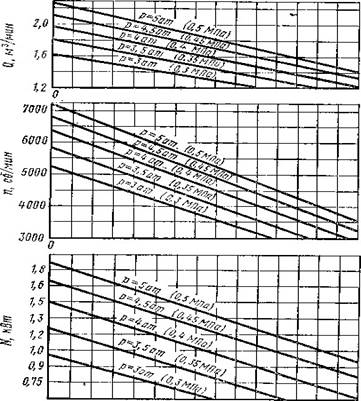
0,5(0,05) 1,0(0,1) 1,5(0,15)
P, am (мпа)
Рис. 11.4. Расход воздуха при работе двигателей
Для приведения в действие ручных машин с пневмодвигателями необходимо наличие компрессора, специальной воздушной сети, специальной аппаратуры для очистки сжатого воздуха от влаги и механических включений. Вследствие всего этого увеличивается количество обслуживающего персонала. Стоимость работы ручных машин с пневмоприводом в 6—7 раз выше, чем стоимость машин с электроприводом. Пневматические двигатели являются объемными машинами и поэтому они очень чувствительны к расходу воздуха. Удельный расход воздуха на каждый киловаттмощности при давлении 6—7 кгс/см2
(0,6—0,7 МПа) составляет 1,5—2 м3
/ч,
Значительное влияние на работу пневмодвигателя оказывает противодавление на выходе воздуха из двигателя. Оно возникает оттого, что пневмодвигатель, как правило, встраивается в специальный корпус, откуда через специальные каналы необходимо отводить воздух. Чем больше противодавление, тем меньше становится расход воздуха при постоянном давлении на входе, при этом снижается также частота вращения двигателя и развиваемая им мощность.
На рис. 11.4 приводятся кривые изменения расхода воздуха, частоты вращения двигателя и мощности в зависимости от давления воздуха на входе и на выходе. При падении давления на входе частота вращения и мощность двигателя уменьшаются. Это ясно из графиков, если принять противодавление постоянным. Частота вращения резко падает также при увеличении нагрузки. Недостатком пневмодвигателей является и большой шум при работе. Несмотря на все эти недостатки, ручные машины с пневмодвигателями имеют широкое применение, так как они просты по конструкции, надежны и безопасны в работе и имеют по сравнению с электрическими малую массу.
В последнее время за рубежом созданы и создаются также у нас ручные машины со специальными высокоемкостными аккумуляторами очень малых габаритов и массы. Такие аккумуляторы встраиваются В корпус или рукоятку ручных машин. Их емкость достаточна для того, чтобы приводить в действие ручную машину в течение всей смены, после чего они становятся на подзарядку.
Для более мощных машин в качестве индивидуального привода наиболее перспективными являются газовые турбинки, у которых топливная система представляет собой отдельный агрегат небольшой массы.
Механизмы передач. В
ручных машинах применяют следующие передачи: редукторы с цилиндрическими и коническими зубчатыми колесами, в том числе с планетарными передачами, которые имеют большое применение; кривошипно-шатунные механизмы; гибкие валы.
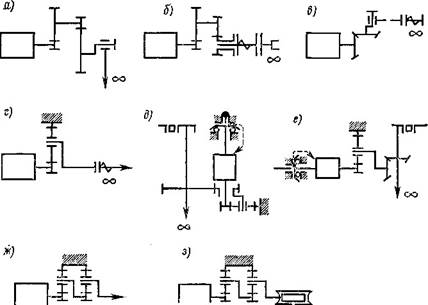
Рис. 11.6. Схемы приводов ручных машин
Р е д у к т о р ы
. К редукторам ручных машин предъявляют следующие требования: большие передаточные числа — 20 ¸ 300; малые габариты; модуль зубчатых колес этих редукторов обычно равен 0,5; 0,8; 1,0; 1,5; как правило, применяется коррегирование зуба; повышенные требования к шуму. Редукторы в этих машинах представляют собой самостоятельный узел, собираемый с двигателем и приводом рабочего органа. Основные схемы применяемых редукторов показаны на рис. 11.6.
На рис. 11.6, а показана схема привода электроножниц, состоящего из двух цилиндрических зубчатых пар. Такая же схема передачи применяется в электрогайковертах и электросверлилках, (рис. 11.6, б). В этой схеме имеются две муфты предельного момента и муфта, включаемая при нажатии инструмента на рабочую поверхность.На рис. 11.6, б показана схема привода с одной парой конических колес, их используют в шлифовальных машинах.
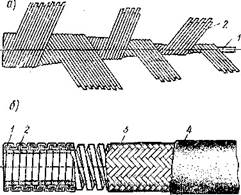
Рис. 11.7. Гибкий вал
Планетарный однорядный механизм (рис. 11.6, г) широко применяется в приводах гайковертов, а для привода пневматических сверлилок планетарный механизм соединен с цилиндрической зубчатой парой (рис. 11.6,(9). В этой сверлилке установлен центробежный регулятор и ручной дублирующий привод, соединенный с ведомым звеном через храповой механизм хода. Аналогичную схему имеет привод пневматической угловой сверлилки (рис. 11.6, е), но в нем используется коническая зубчатая пара. Наличие регуляторов в этих машинах позволяет поддерживать необходимую постоянную частоту вращения, что для шлифовальных машин, работающих с абразивными кругами, очень важно, так как с изменением скорости по сравнению с расчетной увеличивается износ абразивных дисков. В сверлилках, где требуется более передаточное отношение, например для сверления отверстий большого диаметра, имеются два планетарных однородных механизма, соединенных последовательно (рис. 11.6, ж), а в затирочной машине (рис. 11.6, з) — два последовательно соединенных планетарных механизма и червячная передача.
В ручных машинах применяют также приводы с редуктором, составленным из трех и более планетарных механизмов.
К р и в о ш и п н о - ш а т у н н ы й м е х а н и з м
. В ручных машинах наличие кривошипно-шатунного механизма вызывает повышенную вибрацию, что является серьезным препятствием для его применения. Для снижения вибрации следует уравновешивать кривошипно-шатунный механизм самонастраивающимся динамическим компенсатором, что снижает вибрации в широком диапазоне рабочих скоростей в 2—3 раза.
Многие ручные машины не имеют встроенного двигателя и приводятся в движение от двигателя, находящегося на расстоянии от этой машины. В основном передача движения в этих случаях осуществляется при помощи гибких валов. Конструкция гибкого вала показана на рис. 11.7,
а.
Он состоит из стального проволочного сердечника /, на который навито несколько слоев стальной проволоки 2,
причем направление витков в каждом слое противоположно предыдущему. Навивка верхнего слоя обычно имеет направление, обратное направлению вращения вала, чтобы вал не раскручивался во время вращения. Гибкие валы выпускают для правого и левого вращения.
В качестве опоры гибкого вала служит гибкий рукав (рис. 11.7, б).
Он имеет внутри спираль / из стальной ленты или стальной сплющенной проволоки. Направление витков этой спирали противоположно направлению вращения вала. Эта спираль называется предохранительной броней. Чтобы спираль не растягивалась, ее вставляют в гибкий металлический рукав 2,
который снаружи оплетается тонкой стальной оцинкованной проволокой (оплеткой) 3,
а затем резиновой оболочкой 4
с хлопчатобумажными прокладками. Между валом и внутренней спиралью брони делается зазор, заполняемый маслом.
Присоединение валов к двигателям и к ручным машинам осуществляется при помощи концевой арматуры. Гибкий вал припаивают к наконечнику шпинделя привода, а броню — к втулке.
Пока еще нет методов, по которым можно было бы рассчитать гибкий вал, поэтому для выбора таких валов в зависимости от передаваемых крутящих моментов пользуются экспериментальными данными (табл. 11.1).
Таб лица 11.1Основные параметры гибких валов
| Параметры
|
Диаметр вала, мм
|
| 6
|
8
|
10 | 12
|
16
|
20
|
| Допустимый крутящий момент, Н • м Наименьший радиус изгиба, мм
Число слоев вала
Масса 1 м вала, кг
|
0,4
100
4
2
|
0,65
125
4
3,6
|
0,9
200
4
5
|
1,3
250
4
7
|
3,2
300
5
12
|
5,5
350
5
19
|
Как видно из таблицы, диаметр вала следует выбирать не только в зависимости от передаваемого крутящего момента, но также и от
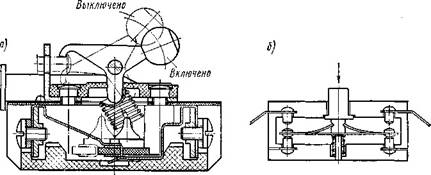
Рис. 11.8.
Механизмы включения и выключения ручных машин радиуса изгиба вала. Чем меньше радиус изгиба, тем меньше должен быть диаметр вала. Потери момента в значительной степени зависят от радиусов изгиба. При отношении радиуса изгиба к диаметру вала, равном 10, потери момента составляют 15—20%, при отношении, равном 7, — 70—80%. Малые радиусы изгиба не только приводят к большим потерям, но также и к быстрому износу вала. Это усложняет методы расчета валов.
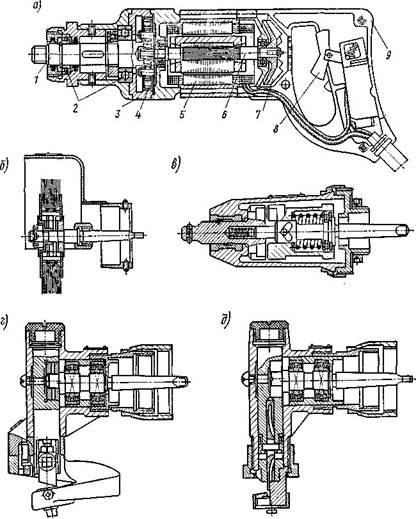
Рис. 11.9. Сверлильная машина с комплектом насадок:
а -
электросверлильная машина; б
- насадка-щетка; в
- насадка-гайковерг, г —
ножницы ножевые; д
— ножницы вырубные
Существующие гибкие валы наиболее эффективно работают при частоте вращения 1500-3000 об/мин, при этом КПД составляет 0,9, если вал работает без изгибов. При меньшей частоте вращения КПД падает. Валыне могут работать при частоте вращения выше 6000 об/мин.
Длина гибких валов может достигать 30 м, но рекомендуется работать при длинах не более 6 м.
Механизм включения и выключения.
Различают два типа таких механизмов: перекидные выключатели (рис. 11.8, а),
которые для включения и выключения машины надо перекидывать из одного положения в другое, и нажимные (рис. 11.8, б), при которых машина включается только при нажатии на них; при прекращении нажима машина автоматически выключается. В последнее время применяются нажимные механизмы с фиксатором.
Выбор того или иного выключателя осуществляется из следующих соображений. Нажимными выключателями оборудуют те ручные машины, во время работы которых движение рабочего органа может оказаться опасным для рабочего и для выполняемой операции или может привести к поломке самого рабочего органа (например, шлифовальные машины, гайковерты, молотки и др.). Остальные машины, при действии которых не нарушаются условия техники безопасности, снабжают перекидными выключателями (например, вибраторы, паркетно-циклевочные машины).
Рабочие органы
ручных машин различны в зависимости от вида выполняемых операций. Некоторые машины предназначены для выполнения одного вида операций (узкоспециализированные), снабжаются рабочим органом только одного типа (например, ручная цепная пила). Отдельные машины используются так, что на них применяется один тип рабочего органа, но разных размеров (например, сверлильные и шлифовальные машины).
Для повышения коэффициента использования ручных машин на строительных и монтажных работах и для снижения количества необходимых машин за рубежом и у нас в стране многие машины снабжают различными видами сменного рабочего оборудования, например сверлильная машина ИЭ-6002 с комплектом насадок (рис. 11.9). Основной ручной машиной в этом наборе является электрссверлильная машина ИЭ1021, а к ней прилагаются: насадка-гайковерт, насадка-ножницы ножевые и насадка-ножницы вырубные. В этом случае машины становятся универсальными.
В ряде случаев для применения инструментов, работа которых осуществляется при разных режимах и в различных условиях, вместе с рабочими органами машины снабжаются дополнительными механизмами.
СВЕРЛИЛЬНЫЕ МАШИНЫ
Сверлильные машины являются одним из наиболее распространенных видов ручных машин. Они предназначены для сверления отверстий в различных материалах: металлах, дереве, бетоне, кирпиче, пластических массах, горных породах и т. д.
Сверлильные машины можно классифицировать: по типу потребляемой энергии — электрические, пневматические и др.; по типу двигателя — высокочастотные, коллекторные и др.; по взаимному расположению осей двигателя и рабочего органа — прямые, угловые; по типу подачи — с ручной, механической, автоматической; по режиму работы — легкие, средние, тяжелые; по направлению вращения — реверсивные, нереверсивные; по регулированию скорости — односкоростные, многоскоростные; по воздействию на обрабатываемый материал — вращательные, ударно-вращательные.
Сверлильная машина (рис. 11.9,
а)
имеет электродвигатель 5; на валу ротора 6
насажен вентилятор 7 для охлаждения двигателя. Вращение от вала ротора передается шпинделю / через редуктор 4
с цилиндрическими зубчатыми колесами. Шпиндель вращается в шарикоподшипниках 2,
установленных в корпусе 3
редуктора. Задняя крышка электродвигателя снабжена рабочей рукояткой 9,
в которой расположен курковый выключатель 8.
Сверлильные машины делятся на легкие (диаметр сверления до 7 мм), средние (диаметр сверления до 16 мм) и тяжелые (диаметр сверления свыше 16 мм). Мощность этих машин 0,12—0,8 кВт, масса 1,2—17 кг.
Легкие сверлильные машины имеют корпус с рукояткой пистолетного типа; средние имеют основную закрытую центральную рукоятку и съемную вспомогательную боковую; тяжелые снабжены двумя боковыми ручками, грудным или плечевым, либо винтовыми упорами.
Большинство сверлильных машин по своей конструкции выпускаются прямые, у них оси шпинделя и вала совпадают или расположены параллельно. Однако для удобства работ в стесненных условиях выпускают машины угловые, у которых шпиндель относительно вала расположен под углом.
Рабочими органами сверлильных машин служат чаще всего обычные стандартные быстрорежущие сверла. При необходимости применяют зенкеры и развертки. Для более производительного сверления чугуна, высокопрочных сталей, сплавов и цветных металлов применяют сверла, оснащенные твердым сплавом.
Основными факторами, влияющими на производительность сверления и качество получаемых отверстий, являются геометрические параметры режущей части сверла (рис. 11.10, а). К ним относятся: задний угол a, передний угол g,
углы при вершине 2j и 2j0
и угол наклона поперечной кромки сверла y.
Форма заточки сверла зависит от его диаметра и свойств обрабатываемого материала. Задний угол a имеет переменную величину и возрастает по мере приближения к центру от 8 до 35°. Чем больше диаметр сверла, тем меньше угол ос, и наоборот. Передний угол у
имеет также переменную величину и уменьшается от периферии, где он изменяется от 8 до 33°, к перемычке, где доходит до 0°, а иногда до отрицательного значения. Угол при вершине 2j зависит от свойств обрабатываемого материала и выбирается в пределах 116 ¸ 118°. Угол наклона поперечной кромки равен 50° для сверл диаметром до 12 мм и 55° — для сверл больших диаметров.
Зенкеры
делятся на насадные и цельные.
Насадные зенкеры изготовляют: цельными из быстрорежущих сталей; оснащенными пластинками из твердого сплава; сборными со вставными ножами из быстрорежущего сплава; сборными со вставными ножами, оснащенными пластинками из твердого сплава.
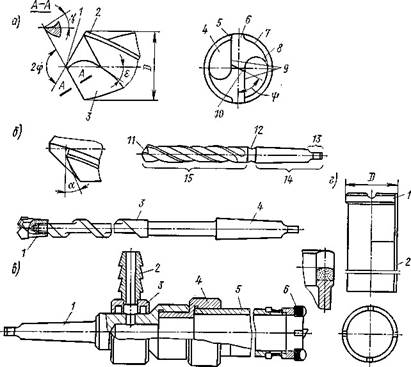
Рис. 11.10. Рабочие органы сверлильных машин:
а, б
— геометрические параметры режущей части сверла; / — поперечная кромка; 2
— ленточка; 3
— передняя поверхность; 4
— канавка; 5
— кромка ленточки; 6
— задняя поверхность; 7
— спинка зуба; 8
— зуб; 9
— режущие кромки; 10
— сердцевина; 11
— режущая часть; 12
— шейка; 13
— лапка; 14
— хвостовик; 15
— рабочая часть; в
— резцы типа РД и кольцевые резцы типа РК; г
— алмазное кольцевое сверло
Развертки
делятся на машинные и ручные.
Машинные развертки бывают: с монолитной твердосплавной головкой и цилиндрическим и коническим хвостовиком; насадные, оснащенные пластинками из твердого сплава.
Ручные развертки делятся на цилиндрические постоянные, котельные, цилиндрические раздвижные (установочные), цилиндрические однозубые и конические для получения различных конусных отверстий.
Часто в строительной и монтажной практике приходится сверлить отверстия в строительных материалах и конструкциях, кирпиче (стены), бетоне и железобетоне (фундамент и перекрытия). Для этих целей служат как ручные машины, так и переносные станки. Рабочим органом таких машин и станков служат перовые сверла, алмазные кольцевые сверла, кольцевые резцы, буровые коронки и т. д.
Инструмент выбирают в зависимости от обрабатываемого материала и диаметра сверления.
При сверлении кирпича и бетона с малоабразивными заполнителями применяют сверла, оснащенные твердосплавными пластинками из металлокерамических сплавов ВК2, ВКЗ, ВК6. Эти сплавы обладают наибольшей износостойкостью при истирании. В качестве привода для таких сверл применяют сверлильные ручные машины вращательного действия.
Сверление отверстий в бетонах повышенной и высокой прочности (М400—600) осуществляют сверлами, оснащенными твердосплавными пластинками из металлокерамических сплавов ВКП и ВК15, обладающих высокой вязкостью и эксплуатационной прочностью. С этими сверлами могут работать сверлильные машины ударно-вращательного принципа действия. Такими сверлами сверлят отверстия диаметром 8—24 мм и глубиной сверления до 100—150 мм.
Для сверления отверстий под трубы и крепления аппаратов в кирпиче, керамзитобетоне, шлакобетоне диаметром 18—55 мм на глубину 600—800 мм применяют двухлезвийные резцы с витой штангой типа РД (рис. 11.10, б). Резцы 1
оснащены пластинками 2
из твердого сплава ВК6. Эти резцы выпускаются в комплекте со штангами 3
и соединяются с ними при помощи резьбы. Применение витых штанг при сверлении позволяет интенсивно удалять буровую мелочь. Хвостовик штанги 4
имеет конус Морзе и для крепления в сверлильных машинах.
Для тех же целей, но при сверлении отверстий в бетоне и железобетоне с арматурой диаметром до 8 мм применяют кольцевые резцы типа РК (рис. 11.10, в), оснащенные чечевицеобразными вставками 6
из твердого сплава В Кб. Резцы комплектуются штангами 5, переходниками 4
и промывочными муфтами 3.
Кольцевой резец соединяется со штангой при помощи двух цилиндрических шипов, которые входят в пазы штанги. Буровая мелочь удаляется водой, которую подводят шлангом к ниппелю 2
муфты 3,
находящейся на цилиндрической части хвостовика. На конце переходника 3
имеется конус Морзе 1.
При сверлении бетона и железобетона в конструкциях перекрытий и фундаментах под анкерные болты и дюбеля целесообразно применять алмазные кольцевые сверла (рис. 11.10, г).
Они выпускаются диаметрами 12 ¸ 125 мм длиной до 450 мм. Сверла состоят из алмазной коронки / и трубчатого удлинителя 2,
являющегося неотделимой частью сверла. Коронка состоит из стального кольца и алмазного твердосплавного слоя. Для крепления алмазных кольцевых сверл на шпинделе ручных сверлильных машин, как и для крепления кольцевых резцов, служат специальные конусы.
На передвижных станках имеется специальный патрон с промывочной муфтой.
Выбор мощности и частоты вращения сверлильных машин производится в зависимости от диаметра и глубины просверливаемого отверстия, а также от материала, в котором сверлят отверстия.
МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВА
При обработке дерева ручные машины применяют для выполнения следующих операций: распиливания, долбления отверстий, строжки, шлифовки, сверления. Как правило, все эти механизмы приводятся в движение электрическим приводом.

Для сверления дерева применяются те же машины, что и для сверления металла.
Для распиливания пиломатериалов толщиной до 60 мм применяют дисковые электропилы (рис. 11.24). Электродвигатель смонтирован на специальном основании, которое может легко перемещаться по обрабатываемому материалу. Глубина пропила зависит от диаметра пильного диска и регулируется подъемом или опусканием двигателя относительно поверхности основания. Основание электропилы может устанавливаться под углом к оси двигателя, при этом производится распиловка древесины под углом.
Пилы оборудуют подвижными подпружиненными предохранительными кожухами. В. зависимости от конструкций эти пилы бывают
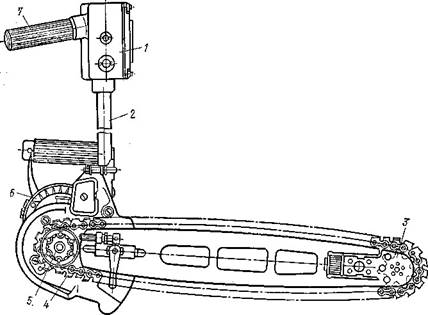
Рис. 11.25. Цепная электропила:
/ — выключатель; 2
— вертикальная трубка; 3
— ведомая звездочка; 4
— пильная цепь;
5
— ведущая звездочка; 6
— электродвигатель; 7 —
рукоятка
с редуктором или без редуктора. Диаметр пил колеблется от 160 до 200 мм, при этом скорость резания составляет 25—30 м/с, а мощность — 0,5—0,8 кВт.
Основным недостатком дисковых пил является то, что диаметр пилы должен в три раза превышать глубину прорезания, поэтому для большой глубины требуются очень большие диаметры пильных дисков, которые должны устанавливаться на стационарных станках, что не всегда удобно в условиях строительной площадки.
Для поперечной распиловки лесоматериалов применяют цепные пилы
(рис. 11.25).
Эти пилы выполняют с электродвигателем или с двигателем внутреннего сгорания. Рабочим органом служит непрерывная цепь, на которой закреплены резцы. Цепь, установленная на направляющей
1
Рис. 11.26. Электрорубанок:
/ — электродвигатель; 2
— кожух; 3 — рукоятка; 4
— выключатель; 5
— плита; 6
правляющие;
шине, приводится в движение звездочкой, закрепленной на редукторе. Скорость резания равна 5—6 м/с, масса 9—19 кг, мощность привода 1—1,5 кВт.
Для строжки древесины применяют электрорубанки (рис. 11.26), в которых приводом служат электродвигатели однофазные с двойной изоляцией и трехфазные асинхронные с короткозамкнутым ротором. Ротор выполнен в виде барабана с ножами.
Электрорубанок можно устанавливать на верстаке в перевернутом положении, что позволяет использовать его как настольный строгальный станок. Скорость резания составляет 18—35 м/с, мощность 0,3—0,6 кВт.
Рис. 11.27. Электродолбежник
При выполнении столярных работ в строительстве часто приходится делать в дереве выемки и пазы. Для этой цели служат электродолбеж-ники (рис. 11.27). Рабочим органом является бесконечная цепь с резцами 5, приводимая в движение от электродвигателя 2
через ведущую звездочку 1.
Электродвигатель вместе с цепью установлен на двух вертикальных направляющих 6,
что дает возможность заглублять рабочий орган в материал. Подъем и опускание производятся рычажной системой 3.
Для включения и выключения служит выключатель 4.
Наибольшая глубина долбления составляет 160 мм, сечение вырубаемого паза 20 X 60 мм, мощность 0,8 кВт, масса 10—21 кг.
СОПЛОВЫЕ УСТРОЙСТВА
При нанесении раствора соплом необходимо, чтобы при соударении раствора со стеной сила удара обеспечивала надежное сцепление с поверхностью. Для этого скорость струи на выходе из сопла должна быть больше скорости в трубопроводах, подающих раствор.
Размер выходного отверстия сопла подбирают так, чтобы при известной производительности растворонасоса можно было получить необходимую скорость раствора на выходе из сопла. Так как растворонасос подает раствор на разные этажи, то скорость в трубопроводах различна. Иногда приходится одно и то же сопло применять с растворонасосами разной производительности. Поэтому сопло должно иметь устройство, позволяющее регулировать выходное отверстие сопла, а следовательно, и скорость истечения раствора.
Сопловые устройства для нанесения штукатурных растворов разделяются на две основные группы: воздушные и безвоздушные.
В воздушные сопловые устройства подается раствор и сжатый воздух, который при выходе из сопла распыляет раствор, а в безвоздушные подается только раствор под давлением.
Безвоздушные сопла просты по конструкции и для работы не требуют компрессора. Однако при этом способе не достигается распыление струи раствора, вследствие чего раствор наносится неравномерно, это усложняет затирку и не всегда обеспечивает высокое качество поверхности, больше вероятность забивки (засорения) сопла.
Имеется несколько различных конструкций безвоздушных сопл.
На рис. 12.1, а
показано одно из самых простых сопл. Здесь необходимая скорость истечения раствора достигается за счет формы сопла (радиуса кривизны). Сопло не имеет регулятора размера выходного отверстия, что является его недостатком.
На рис. 12.1, б
показано прямоточное сопло, дающее плоский факел. Оно состоит из корпуса 3,
выполняемого из капрона, головки 2 из волокна, резиновой диафрагмы 1
(рис. 12.1, в)
гребенчатого хвостовика 4.
а) б)
Рис. 12.1. Сопла для нанесения растворов
В резиновой диафрагме имеются два отверстия, соединенные прорезью. Такое сопло работает лучше, чем предыдущее, однако оно сложнее по конструкции. Кроме того, резиновая диафрагма не обладает достаточной надежностью и часто засоряется. Сопла с воздушным распылением выполняют двух типов: с центральной подачей воздуха и с кольцевой подачей воздуха. Сопла второго типа сложнее по конструкции, но дают лучшее распыление раствора. В обоих видах сопл регулирование скорости выхода раствора при постоянных размерах выходного отверстия форсунок осуществляется изменением расхода воздуха при помощи крана.
На рис. 12.1, г
показано сопло с центральной подачей воздуха. Оно состоит из форсунки /, корпуса 2,
трубки для подвода воздуха 3,
крана для регулирования подвода воздуха 4.
В корпусе имеется штуцер 5
для надевания шланга подвода раствора.
На рис. 12.1, д
приводится сопло с кольцевой подачей воздуха. Оно состоит из форсунки /, корпуса 2,
штуцера 3
для надевания шланга подачи раствора, колена 4,
крана 5 и штуцера б для надевания шланга подачи воздуха. Штуцер 3
ввернут в корпус так, что между ним и корпусом остается кольцевое пространство, куда воздух попадает из колена 4
и подается в форсунку через кольцевой зазор между коническим кольцом 7 и штуцером 3.
На рис. 12.1, е
приводится сопло для нанесения торкрет-штукатурки. В сопло подается не раствор, а сухая смесь с воздухом и через другое отверстие подводится вода. В этой конструкции регулируется только расход воздуха при помощи крана.
Качество нанесения раствора, а также его потери зависят от объемного соотношения раствора и воздуха. Это соотношение зависит от размера выходного отверстия. Практикой установлено, что на каждый 1 м3
раствора должно подаваться не менее 4—5 м3
воздуха, при этом давление должно быть не менее 5 кгс/см2
(0,5 МПа).
Распыление смеси в значительной степени зависит от размера отверстия, которое обычно делается для давления воздуха 5 кгс/см3
(0,5 МПа) не более 5—6 мм.
Хорошее качество наносимого слоя зависит от расстояния между выходным отверстием и поверхностью, на которую наносится раствор; оно должно быть 40—60 мм, а также от угла наклона сопла, который обычно составляет 60— 90°. Кроме того, необходимо поддерживать постоянное давление воздуха, так как при пониженном давлении увеличиваются потери раствора.
ЗАТИРОЧНЫЕ МАШИНЫ
Эти машины выполняют с электрическим и пневматическим приводом. Помимо привода и рабочего органа в затирочных машинах имеется редуктор, при помощи которого снижается частота вращения затирочного диска. Кроме того, так как процесс затирки происходит при смачивании поверхности, то к машинам подается вода.
С помощью затирочных машин можно выполнять механизированную затирку штукатурного накрывочного слоя, затирку цементно-песчаного раствора на поверхностях железобетонных панелей, шлифовку прошпаклеванных поверхностей. Обрабатывают как горизонтальные, так и вертикальные поверхности.
Одна из конструкций затирочных машин приводится на рис. 12.2, а.
Рабочий орган машины состоит из двух дюралевых дисков, помещенных один внутри другого, которые вращаются с разной скоростью, благодаря чему достигается почти одинаковая окружная скорость. На поверхности дисков имеются накладки из войлока или другого материала.
У конструкции, показанной на рис. 12.2, б, рабочим органом является лопастной диск, обычно изготовляемый из алюминия, а на поверхности лопастей также имеются войлочные накладки.
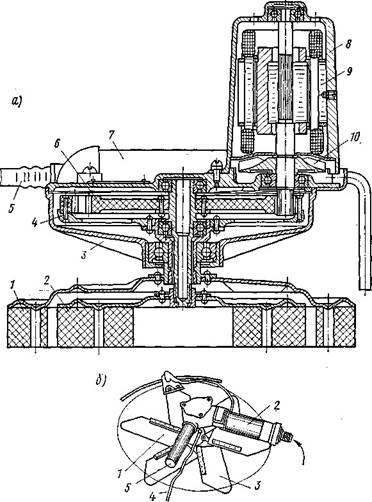
Рис. 12.2. Затирочные машины:
а
— затирочная машина с электроприводом; / — большой диск; 2 — малый диск- 3
— корпус; 4, 6 —
зубчатые колеса; 5
— штуцер подачи воды; 7 — рукоятка; в
— корпус электродвигателя; 9
— электродвигатель; 10
— вентилятор; б —
затирочная машина с пневматическим приводом; / — рабочий орган (диск); 2
— пневмопривод; 3
— лопасти; 4
— шланг подачи воды;
5
— рукоятка
Качество затирки зависит от скорости вращения диска и от удельного давления на затираемую поверхность. Так как скорости различны на разных расстояниях от центра диска, то скорость обычно подбирают по среднему значению, которое обычно принимают равным 6¸10 м/с. Удельное давление, которое необходимо создать в процессе затирки, зависит от состава раствора и от времени между нанесением раствора и его затиркой и выбирается в пределах 0,08 ¸0,12 кгс/см2
(0,012 МПа).
Производительность таких машин 30—50 м2
/ч, мощность привода 0,1—0,12 кВт, частота вращения дисков 200—700 об/мин, масса 2,5— 4,0 кг.
ОБОРУДОВАНИЕ И РУЧНЫЕ МАШИНЫ ДЛЯ МАЛЯРНЫХ РАБОТ
Малярные работы являются трудоемкой операцией. В среднем производительность даже при применении ручных машин не превышает 15— 20 м2
/смен.
Малярные работы включают: подготовительные работы; покраску.
К подготовительным работам относятся: приготовление материалов; нанесение шпаклевочного слоя и его зачистка; нанесение грунтовочного слоя.
Рис. 12.3. Установка для централизованного приготовления шпаклевок, меловой пасты и замазок
Заготовка материалов для подготовительных и окрасочных работ производится чаще всего в заготовительных цехах или колерных мастерских. Приготовленная в колерных мастерских продукция доставляется на стройку в бидонах. Часто такая продукция является полуфабрикатом и дополнительно дорабатывается в малярных станциях, которые делают инвентарными и передвижными.
На рис. 12.3 показана схема установки для централизованного приготовления шпаклевок, меловой пасты и замазок. Мел загружается в виде кучи 6
на паровые подогреватели 7. Частично подсушенный мел, идущий на приготовление шпаклевок и меловой пасты, подается ковшовым конвейером 5
и винтовым конвейером 3
в вертикальные смесители 4,
а затем в жерновые краскотерки 2.
Готовая продукция хранится в бункерах /.
Для приготовления замазки мел с подогревателей перемещается в сушилку 8,
оттуда на барабан мелосеялки 9.
Просеянный мел подается ковшовым конвейером 10
в бункер 11
, затем винтовой смеситель 13,
в который из бака 12
поступают жидкие добавки. Для хранения готовой замазки служит бункер 14.
Рис. 12.5. Жерновая краскотерка:
1 —
вал; 2, 3
— жернова; 4 —
бункер; 5
— побудитель; 6
— электродвигатель; 7
— редуктор
На рис. 12.5 показана жерновая краскотерка. Она обеспечивает тонкость помола 0,02—0,035 мм. Такие краскотерки выпускаются двух типоразмеров. Одна имеет мощность 1,7 кВт. Производительность ее при изготовлении масляной и красочной пасты достигает 60 кг/ч, а при изготовлении клеевых колеров — 100 кг/ч. Вторая имеет мощность 7 кВт и производительность соответственно 250 и 400 кг/ч.
Для помола мела при приготовлении колеров, шпаклевок и замазок чаще применяют роторные мелотерки (рис. 12.6). Ими можно перерабатывать как сухой, так и влажный мел. Куски мела загружаются в воронку /, откуда они попадают в корпус 3,
внутри которого вращается ротор 2.
Мелу, попадающему на ротор, сообщается большая окружная скорость, он попадает на отбойную плиту 5
и измельчается. Кроме того, дополнительное измельчение происходит в результате трения частиц мела о стенки ротора и друг с другом. Измельченный мел под действием центробежных сил выпадает через разгрузочный люк 6.
Для очистки щелей ротора служит скребок 7
с рукояткой 4.
Для перемешивания материалов применяются смесители разных конструкций и пневмоэмульсаторы. На рис. 12.7, а
показан двух-вальный смеситель для приготовления замазки и шпаклевки. В нем перемешивание происходит при помощи двух валов, вращающихся навстречу друг другу с различными скоростями. Производительность таких смесителей 200—300 кг/ч.
Для приготовления водных и масляных красочных составов применяют лопастные смесители (рис. 12.7, а).
Перемешивание происходит при помощи диска с тремя лопастями 3,
приводимого в движение электродвигателем /. Для снижения частоты вращения между двигателем и валом диска установлен двухступенчатый редуктор 2.
Бак 4
смесителя снабжен краном 5
для слива получаемой смеси.
Рис. 12.6. Роторная мелотерка

Рис. 12.7. Смесители:
а —
двухвальньш; / — рукоятка механизма выгрузки смеси; 2
— смесительные валы; 3
— корыто; 4 —
редуктор; 5
— электродвигатель; 6
— станина; б
— пневмоэмульсатор; в
— лопастной
С помощью пневмо-эмульсатора (рис. 12.7, б)
можно осуществлять разжижение паст и разбавление олифой и растворителями густотертых масляных составов и водомасляных эмульсий, а также перемешивание составов и их перекачивание. Пневмо-эмульсатор состоит из бака /, закрытого крышкой 3,
на которой закреплены воронка 6
с краном 7
для подачи составляющих, крана 4
для подачи сжатого воздуха, крана 5для соединения бачка с атмосферой и манометра 5.
Составляющие заливаются через воронку и перемешиваются сжатым воздухом, который поступает через кран 2, в это время кран 8
открыт, а кран 9
закрыт. Затем закрываются краны 7 и 8
и готовая эмульсия выпускается через кран 9.
Аппараты и инструменты для нанесения шпаклевочных, грунтовочных и красочных составов делятся на пневматические, у которых состав распыливается сжатым воздухом, и механические, в которых распыление струи состава происходит в результате его завихрения в канале форсунки.
При втором способе получается меньшее туманообразование и, следовательно, меньшие потери состава.
На рис. 12.8 показан аппарат для нанесения шпаклевки. Он состоит из бака 2
на двух колесах с герметической крышкой / и поручнем 3.
На крышке установлены предохранительный клапан и манометр. Состав заливается в бак сверху через горловину, туда же подается сжатый воздух от компрессора через трехходовой кран. В нижней части бака имеется штуцер, к которому присоединяется шланг для
Рис. 12.8. Аппарат для нанесения шпаклевочных составов: а
— бак; б
— удочка
подачи состава к удочке. Удочка (рис. 12.8, б) состоит из двух трубок 4
и 6,
через одну из них подается состав, а через другую сжатый воздух. Количество того и другого регулируется кранами 7, а скорость истечения, т. е. факел, насадкой 5.
На рис. 12.9, а
приводится конструкция удочки безвоздушного распыления. Она применяется для нанесения шпаклевочных составов
Рис. 12.9. Удочка безвоздушного распыления
и побелки потолков и работает по принципу механического безвоздушного распыления. Удочка состоит из головки (форсунки) /, подающей трубки 2,
клапана 3.
Форсунка (рис. 12.9, б) включает в себя корпус 4,
в который ввернут направляющий конус 5
и сопло 7.
Состав подается в корпус форсунки через трубку 6,
расположенную эксцентрично оси форсунки.
Составы подаются к удочке от нестандартных баков, давление в которых должно быть не менее 7 кгс/см2
(0,7 МПа), что является некоторым недостатком. Как правило, в стандартных баках давление не превышает 4—5 кгс/см2
(0,4—0,5 МПа). Достоинством этой удочки является малое туманообразование.
Нанесение шпаклевочных составов может также осуществляться шпателем с принудительной подачей шпаклевки.
Шпатель (рис. 12.10) представляет собой трубку, на нижнем конце которой имеется пробковый кран и штуцер, через который на поверхность подается под давлением шпаклевка; на верхнем конце закреплена полоса резины для разравнивания слоя шпаклевки по поверхности.
А-А
Рис. 12.10. Шпатель с принудительной подачей шпаклевки
Для выполнения различных видов окрасочных работ в строительстве и на монтаже при нанесении масляных красок, лаков, эмалей, грунта широко применяют краскораспылители. Наиболее часто используют: пистолеты-краскораспылители, которые распыляют красочные составы под действием сжатого воздуха. В головках; электро-краскопульты, служащие для нанесения на поверхности маловязких красочных составов (известковых, водоклеевых и др.) механическим способом.
Для нанесения особо вязких смоляных, перхлорвиниловых и битумных красочных составов применяется бескомпрессорный распылитель высокого давления.
Пистолет-краскораспылитель
показан на рис. 12.11. Он состоит из корпуса 5
, распылительной головки 3,
запорной иглы 10,
нажимной скобы 9,
рукоятки 7. К штуцеру 8
присоединяется шланг для подачи сжатого воздуха, к штуцеру 11 —
шланг для подачи состава. Распылительная головка имеет одно центральное отверстие / и несколько боковых отверстий 2,
в зависимости от числа которых получается различная форма факела. Запорная игла 10
под действием пружины 6
перекрывает форсунку 4
и воздушный канал /.
Окрасочные составы подаются к пистолетам-распылителям из съемных бачков или из красконагнетательных баков.
Рис. 12.11. Пневматический пистолет-краскораспылитель
Красконагнетательный бак (рис. 12.12) состоит из корпуса с герметической крышкой и помещенного внутри него ведра, в котором находится мешалка и трубка с фильтром. Сжатый воздух поступает через кран /. Часть воздуха, не проходя через редуктор, поступает через кран 3
к пистолетукраскораспылителю. Другая часть сжатого воздуха проходит через редуктор 2
и после снижения давления до нужной величины поступает в бак, вытесняя налитый в ведро состав, который через фильтр с трубкой 5
и кран 4
поступает к пистолету-краскораспылителю.
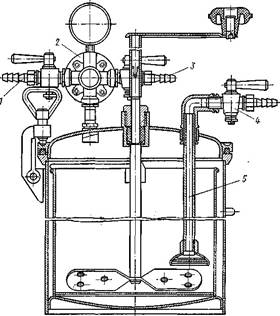
Рис. 12.12. Красконагнетательный бак
Краскопульты
выполняют с ручным или электрическим приводом. На рис. 12.13 показан ручной краскопульт. Он состоит из резервуара 1,
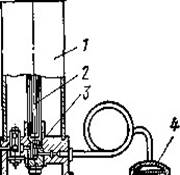
Рис 12.13. Ручной краскопульт
насоса 2,
всасывающего клапана 3,
фильтра 4,
клапанной системы из всасывающего, нагнетательного и предохранительного клапанов.
Производительность таких краскопультов составляет до 200 м2
/ч.
Рабочее давление равно 4 кгс/см2
(0,4 МПа), масса 7,5 кг.
Электрокраскопульт (рис. 12.14) служит для нанесения на поверхности маловязких красочных составов (известковых, водоклеевых
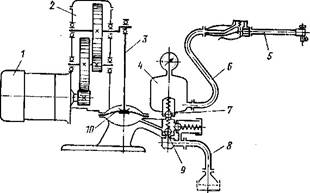
Рис. 12.14. Электрокраскопульт
и др.) механическим способом. Состав подается при помощи диафраг-мового насоса. Качание диафрагмы 10
осуществляется от электродвигателя / через зубчатый редуктор 2
и кривошипный механизм 3.
При движении диафрагмы вверх в камеру всасывается состав из трубопровода 8.
В это время шариковый клапан 9
открывается. При обратном ходе диафрагмы шариковый клапан 9
закрывается, открывается шариковый клапан 7 и состав попадает в ресивер 4,
а оттуда по шлангу 6
к удочке 5.
МАШИНЫ ДЛЯ ОТДЕЛКИ ПОЛОВ
Деревянные, мозаичные, а также полы из полимерных материалов после укладки обрабатывают для придания им гладкости. Отделка паркетных и других деревянных полов состоит из строгания, шлифования и полирования.
Машина для строгания паркетных полов
показана на рис. 12.15. Рабочим органом служит ножевой барабан 3,
на котором закреплены ножи 2
(обычно два). Барабан является одновременно обращенным ротором электродвигателя. Статор электродвигателя установлен на валу, закрепленном в боковых крышках корпуса. Кроме ножей на барабане закреплена крыльчатка — вентилятор для отбрасывания стружки в сторону. Ходовая часть машины состоит из одного переднего / и двух задних роликов 4.
Регулирование толщины снимаемой стружки осуществляется поднятием или опусканием оси ротора при помощи тяги 5, перемещаемой гайкой 7. На рукоятке 6
установлен выключатель 8.
Мощность привода таких машин 1,5—2 кВт, производительность составляет 15—20 м2
/ч, масса 45—60 кг.
Паркетошлифовальная машина
(рис. 12.16) имеет рабочий орган в виде фибрового шлифовального диска / диаметром 200—250 мм, установленного под углом 3° к обрабатываемой поверхности. Такое положение диска предохраняет его от перегрева и обеспечивает лучший отсос пыли вентилятором 5.
Диск приводится во вращение электродвигателем 3.
Ходовая часть состоит из одного переднего ролика 7, который может свободно поворачиваться, и двух задних роликов 4.
На рукоятке 2
установлен выключатель /.
Мощность таких машин составляет 1,5—2,0 кВт, производительность 40—60 м2
/ч, масса 35—45 кг.
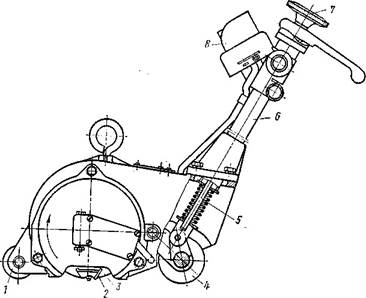
Рис. 12.15. Машина для строгания паркетных полов
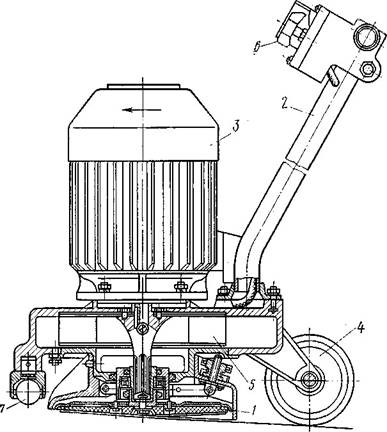
Рис. 12.16. Паркетошлифовальная машина
|
