
краткий курс
МАТЕМАТИЧЕСКИЕ МЕТОДЫИССЛЕДОВАНИЯ ОПЕРАЦИЙВ ЭКОНОМИКЕ
П. Конюховский
УЧЕБНОЕ ПОСОБИЕ
Санкт-Петербург
Москва • Харьков • Минск
2000
Конюховский П. В.
Математические методы исследования операций в экономике
Серия «Краткий курс»
Главный редактор издательства
Заведующий редакцией
Художественный редактор
Литературный редактор
Верстка
|
В. Усманов
Л. Волкова
В. Земских
Е. Маслова
Е. Маслова
|
ББК22.183я7+65.529 УДК519.8(075)+658.012.122(075)
Конюховский П. В.
К65 Математические методы исследования операций в экономике — СПб.: Издательство «Питер», 2000. — 208 с. — (Серия «Краткийкурс»).
ISBN 5-8046-0190-3
В настоящем учебном пособии представлены основные разделы исследования операций. Упор делается на изложении теоретических и практических аспектов алгоритмов решения экстремальных задач, которые формулируются на базе известных экономико-математических моделей. Отдельное внимание уделяется вопросам содержательной экономической интерпретации формальных математических понятий.
Серия книг «Краткий курс» предназначена для студентов экономических и управленческих специальностей всех форм обучения, а также для всех интересующихся соответствующей темой.
© Конюховский П. В., 2000
© Серия, оформление, ЗАО «Издательство «Питер», 2000
Все права защищены. Никакая часть данной книги не может быть воспроизведена в какой бы то ни было форме без письменного разрешения владельцев авторских прав.
ISBN 5-8046-0190-3
Издательство «Питер». 196105, С.-Петербург, Благодатная ул., 67. Лицензия ЛР № 066333 от 23.02.99.
Подписано к печати15.09.99. Формат 60х90/16. Усл. п. л. 13.
Тираж 5000. Заказ 4418.
Отпечатано с фотоформ в АООТ «Типография „Правда”».
119. С.-Петербург, Социалистическая ул., 14.
ПРЕДИСЛОВИЕ
Последние годы ознаменовались выходом большого количества книг, посвященных тем или иным разделам экономической науки. Среди них ведущее место, как по количеству наименований так и по тиражу, занимают издания, посвященные финансам банковскому делу, теоретическим и практическим вопросам управления ценными бумагами. В значительной степени сложившаяся ситуация объясняется острым дефицитом подобной литературы в предыдущие десятилетия. Однако обратной стороной этого несомненно позитивного процесса стало возникновение определенного дидактического вакуума вокруг других экономических тем. Стремление восполнить один из таких пробелов послужило стимулом для выпуска настоящей книги, посвященной основам исследования операции.
Реклама

Формирование исследования операций как самостоятельной ветви прикладной математики относится к периоду 40-х и 50-х годов. Последующие полтора десятилетия были отмечены широким применением полученных фундаментальных теоретических результатов к разнообразным практическим задачам и связанным с этим переосмыслением потенциальных возможностей теории. В результате исследование операции приобрело черты классической научной дисциплины, без которой немыслимо базовое экономическое образование.
Обращаясь к задачам и проблемам, составляющим предмет исследования операций, нельзя не вспомнить о вкладе, внесенном в их решение представителями отечественной научной школы, среди которых в первую очередь должен быть назван Л. В. Канторович, ставший в 1975 г. лауреатом Нобелевской премии за свои работы по оптимальному использованию ресурсов в экономике.
Предлагаемая вашему вниманию книга задумана как учебное пособие для специалистов в области экономики и управления предприятиями, и призвано создать общее представление о типах задач, изучаемых в исследовании операции, методах их решения и принципиальных идеях, лежащих в основе этих методов. Математические аспекты предмета по отношению к поставленным перед настоящим изданием целям не являются первостепенными. Однако, по мнению автора, попытки излагать те или иные результаты в полном отрыве от математического аппарата, на основе которого они получены, являются несостоятельными и выхолащивающими объективную количественную сторону изучаемых объектов. Поэтому для понимания излагаемого здесь материала от читателя потребуется определенное владение базовыми знаниями из соответствующих разделов математического анализа и линейной алгебры. Необходимо признать, что любая книга экономико-математического направления может быть подвергнута критике либо за чрезмерную перегруженность математическими изысками и оторванность от реальной экономической проблематики, либо за отсутствие математической строгости и корректности, и, естественно, каждый автор, исходя из своих вкусов, представлений и умения, ищет оптимальное сочетание того и другого. Ну а о том, насколько это удается, судит читатель...
Реклама

Книга способствует расширению читательского кругозора и помогает ориентироваться среди разделов, задач и методов исследования операций. В этой связи многие темы представлены в обзорном ключе.
Несколько замечаний по используемым в ходе изложения условным обозначениям:
¨ базовые понятия предмета при их первом появлении в тексте выделяются курсивом
, а наиболее важные их них (те, которые стоит не забывать и после прочтения!) — жирным шрифтом;
¨ перед фундаментальными определениями стоит символ -;
¨ количество приводимых в данной книге теорем минимизировано (это, однако, не должно создать у неподготовленного читателя превратного впечатления об их действительном количестве); в тех местах, где встречается теорема, ее формулировка выделяется слева двойной чертой;
¨ доказательство теоремы завершается символом -.
ВВЕДЕНИЕ
Начало развития исследования операций как науки традиционно связывают с сороковыми годами двадцатого столетия. Среди первых исследований в данном направлении может быть названа работа Л. В. Канторовича «Математические методы организации и планирования производства», вышедшая в 1939 г. В зарубежной литературе отправной точкой обычно считается вышедшая в 1947 г. работа Дж. Данцига, посвященная решению линейных экстремальных задач.
Следует отметить, что не существует жесткого, устоявшегося и общепринятого определения предмета исследования операций. Часто при ответе на данный вопрос говорится, что «исследование операций
представляет собой комплекс научных методов для решения задач эффективного управления организационными системами» [14].
Природа систем, фигурирующих в приведенном определении под именем «организационных», может быть самой различной, а их общие математические модели находят применение не только при решении производственных и экономических задач, но и в биологии, социологических исследованиях и других практических сферах. Кстати, само название дисциплины связано с применением математических методов для управления военными операциями.
Несмотря на многообразие задач организационного управления, при их решении можно выделить некоторую общую последовательность этапов, через которые проходит любое операционное исследование. Как правило, это:
1. Постановка задачи.
2. Построение содержательной (вербальной) модели рассматриваемого объекта (процесса). На данном этапе происходит формализация цели управления объектом, выделение возможных управляющих воздействий, влияющих на достижение сформулированной цели, а также описание системы ограничений на управляющие воздействия.
3. Построение математической модели, т. е. перевод сконструированной вербальной модели в ту форму, в которой для ее изучения может быть использован математический аппарат.
4. Решение задач, сформулированных на базе построенной математической модели.
5. Проверка полученных результатов на их адекватность природе изучаемой системы, включая исследование влияния так называемых внемодельных факторов, и возможная корректировка первоначальной модели.
6. Реализация полученного решения на практике.
Центральное место в данной книге отведено вопросам, относящимся к четвертому пункту приведенной выше схемы. Это делается не потому, что он является самым важным, сложным или интересным, а потому, что остальные пункты существенно зависят от конкретной природы изучаемой системы, в силу чего для действий, которые должны производиться в их рамках, не могут быть сформулированы универсальные и содержательные рекомендации. По этому поводу, например, X. Таха заметил, что исследование операций одновременно является как наукой, так и искусством [27].
Математическое моделирование
в исследовании операций является, сводной стороны, очень важным и сложным, а с другой — практически не поддающимся научной формализации процессом. Заметим, что неоднократно предпринимавшиеся попытки выделить общие принципы создания математических моделей приводили либо к декларированию рекомендаций самого общего характера, трудноприложимых для решения конкретных проблем, либо, наоборот, к появлению рецептов, применимых в действительности только к узкому кругу задач. Поэтому более полезным представляется знакомство с техникой математического моделирования на конкретных примерах.
В качестве таких примеров приведем несколько классических экономико-математических моделей и задач, которые могут быть сформулированы на их основе.
Управление портфелем активов.
Рассмотрим проблему принятия инвестором решения о вложении имеющегося у него капитала. Набор характеристик потенциальных объектов для инвестирования, имеющих условные имена от А до F, задается следующей таблицей.
| Название |
Доходность (в%) |
Срок выкупа (год) |
Надежность (в баллах) |
А
|
5,5
|
2001
|
5
|
В
|
6,0
|
2005
|
4
|
С
|
8,0
|
2010
|
2
|
D
|
7,5
|
2002
|
3
|
Е
|
5,5
|
2000
|
5
|
F
|
7,0
|
2003
|
4
|
Предположим, что при принятии решения о приобретении активов должны быть соблюдены условия:
a) суммарный объем капитала, который должен быть вложен, составляет $ 100 000;
b) доля средств, вложенная в один объект, не может превышать четверти от всего объема;
c) более половины всех средств должны быть вложены в долгосрочные активы (допустим, на рассматриваемый момент к таковым относятся активы со сроком погашения после 2004 г.);
d) доля активов, имеющих надежность менее чем 4 балла, не может превышать трети от суммарного объема.
Приступим к составлению экономико-математической модели для данной ситуации. Целесообразно начать процесс с определения структуры управляемых переменных. В рассматриваемом примере в качестве таких переменных выступают объемы средств, вложенные в активы той или иной фирмы. Обозначим их как хА
, х
В
, х
C
, х
D
,
хЕ
,
х
F
. Тогда суммарная прибыль от размещенных активов, которую получит инвестор, может быть представлена в виде

На следующем этапе моделирования мы должны формально описать перечисленные выше ограничения a-d на структуру портфеля.
a) Ограничение на суммарный объем активов:
х
A
+ х
B
+ х
C
+ х
D
+ х
E
+ х
F
≤ 100 000. (2)
b) Ограничение на размер доли каждого актива:
х
A
≤ 25 000, xB
≤ 25 000,xC
≤ 25 000,
xD
≤ 25 000,xE
≤ 25 000,xF
≤ 25 000. (3)
c) Ограничение, связанное с необходимостью вкладывать половину средств в долгосрочные активы:
xB
+ xC
≥50 000. (4)
d) Ограничение на долю ненадежных активов:
х
C
+ х
D
≤ 30 000. (5)
Наконец, система ограничений в соответствии с экономическим смыслом задачи должна быть дополнена условиями неотрицательности для искомых переменных:
х
A
≥ 0, х
B
≥ 0, хС
≥ 0, х
D
≥ 0, х
E
≥ 0, х
F
≥ 0. (6)
Выражения (1)-(6) образуют математическую модель поведения инвестора. В рамках этой модели может быть поставлена задача поиска таких значений переменных х
A
, xB
, xC
, xD
, xE
, xF
, при которых достигается наибольшее значение прибыли (т. е. функции (1)) и одновременно выполняются ограничения на структуру портфеля активов (2)-(6).
Перейдем теперь к рассмотрению более общих моделей и задач.
Простейшая задача производственного планирования
. Пусть имеется некоторый экономический объект (предприятие, цех, артель и т. п.), который может производить некоторую продукцию n
видов. В процессе производства допустимо использование m
видов ресурсов (сырья). Применяемые технологии характеризуются нормами затрат единицы сырья на единицу производимого продукта. Обозначим через а
i,j
количество i
-го ресурса(i
Î
1:
m
), которое тратится на производство единицы j
-го продукта (j
Î
1:n). Весь набор технологических затрат в производстве j-го продукта можно представить в виде вектора-столбца
а технологию рассматриваемого предприятия (объекта) в виде прямоугольной матpицы pазмеpности m
на n
:
Если j
-й продукт производится в количестве xj
, то в рамках описанных выше технологий мы должны потратить a
1,j
xj
первого ресурса,a
2,j
xj
— второго, и так далее, am,j
xj
- m
-го. Сводный план производства
по всем продуктам может быть представлен в виде n
-мерного вектора-строки х = (х
1
, х
2
,...,х
j
,...,х
n
).
Тогда общие затраты по i
-му ресурсу на производство всех продуктов можно выразить в виде суммы

представляющей собой скалярное произведение векторов а
j
и х.
Очевидно, что всякая реальная производственная система имеет ограничения на ресурсы, которые она тратит в процессе производства. В рамках излагаемой модели эти ограничения порождаются m
-мерным вектором b
=
(b1
,
b2
,...,
bm
),
где bi
— максимальное количествоi
-гo продукта, которое можно потратить впроизводственном процессе. В математической форме данные ограничения представляются в виде системы m
неравенств:
Применяя правила матричной алгебры, систему (7) можно записать в краткой форме, представив левую часть как произведение матрицы А
на вектор х
, а правую — как вектор b
:

К системе (8) также должны быть добавлены естественные ограничения на неотрицательность компонентов плана производства: х
1
≥0,..., х
j
≥0, .... х
n
≥0, или, что то же самое,

Обозначив через с
j
цену единицы j
-го продукта, получим выражение суммарного дохода от выполнения плана производства, задаваемого вектором х:

Формулы (8)-(10) являются не чем иным, как простейшей математической моделью, описывающей отдельные стороны функционирования некоторого экономического объекта, поведением которого мы хотим управлять. В рамках данной модели, вообще говоря, можно поставить различные задачи, но, скорее всего, самой «естественной» будет задача поиска такого плана производства х
Î
Rn
,
который дает наибольшее значение суммарного дохода, т. е. функции (10), и одновременно удовлетворяет системе ограничений (8)-(9). Кратко такую задачу можно записать в следующем виде:

Несмотря на явную условность рассматриваемой ситуации и кажущуюся простоту задачи (11), ее решение является далеконе тривиальным и во многом стало практически возможным только после разработки специального математического аппарата. Существенным достоинством используемых здесь методов решения является их универсальность, поскольку к модели (11) могут быть сведены очень многие как экономические, так и неэкономические проблемы.
Поскольку любая научная модель содержит упрощающие предпосылки, для корректного применения полученных с ее помощью результатов необходимо четкое понимание сути этих упрощений, что, в конечном счете, и позволяет сделать вывод об их допустимости или недопустимости. Наиболее «сильным» упрощением в рассмотренной модели является предположение о прямо пропорциональной (линейной) зависимости между объемами расхода ресурсов и объемами производства, которая задается с помощью норм затрат а
i,j
.
Очевидно, что это допущение далеко не всегда выполняется. Так, объемы расхода многих ресурсов (например, основных фондов) изменяются скачкообразно в зависимости от изменения компонентов объема производства х
. К другим упрощающим предпосылкам относятся предположения о независимости цен с
j
от объемов х
j
, что справедливо лишь для определенных пределов их изменения, пренебрежение эффектом кооперации в технологиях и т. п. Данные «уязвимые» места важно знать еще и потому, что они указывают принципиальные направления совершенствования модели.
Транспортная задача
. Рассмотрим проблему организации перевозки некоторого продукта между пунктами его производства, количество которых равно m
,
и n
пунктами потребления. Каждый i
-й пункт производства (i
Î
1:m
) характеризуется запасом продукта аi
≥ 0, а каждый j-и пункт потребления (j
Î
1: n
) — потребностью в продукте bj
≥ 0. Сеть дорог, соединяющая систему рассматриваемых пунктов, моделируется с помощью матрицы С размерности m
на n
, элементы которой с
i,j
представляют собой нормы затрат на перевозку единицы груза из пункта производстваi
в пункт потребления j
.
План перевозки груза в данной транспортной сети представляется в виде массива элементов размерности m
х n
:
х = (
x
1,1
…
x
1,n
, x2,1
….,x2,n
,… , xi,1
, …, xi,n
,…, xm,1
,…,xm,n
).
(12)
В (12) план перевозок х
может рассматриваться как вектор, распадающийся на m
групп, по n элементов в каждой, причем i
-я группа соответствует объемам груза, вывозимым из j
-го пункта производства во все возможные пункты потребления. Если реальная перевозка между пунктами i
и j
отсутствует, то полагают х
i,j
= 0.
Ограничения на возможные значения х
Î
Rmn
имеют вид:
1. Ограничение на удовлетворение потребностей во всех пунктах потребления:

2. Ограничения на возможности вывоза запасов из всех пунктов производства:

3. Условия неотрицательности компонентов вектора плана:
х, х
i,j
≥ 0,i
Î
l : m,
j
Î
l : n.
(15)
Существенной характеристикой описываемой модели является соотношение параметров а
i
и bj
.
Если суммарный объем производства равен суммарному объему потребления, аименно,
то система называется сбалансированной.
При выполнении условия сбалансированности разумно накладывать такие ограничения на суммарный ввоз и вывоз груза, при которых полностью вывозится весь груз и не остается неудовлетворенных потребностей, т. е. условия (13) и (14) приобретают форму равенств.
По аналогии с задачей производственного планирования предположим, что затраты на перевозку прямо пропорциональны количеству перевозимого груза. Тогда суммарные затраты на перевозку в системе примут вид:

Функция (16) и описанные выше ограничения, записанные в форме

задают транспортную модель
. На ее основе может быть сформулирована задача минимизации суммарных затрат на перевозки:
f(x)=cx
→ min, x
Î
D, (18)
которая в литературе получила название транспортной задачи в матричной постановке
. Вообще говоря, транспортная задача является частным случаем задачи (11), но в силу ряда особенностей для ее решения применяются специфические методы, которые, помимо прочего, позволяют прийти к важным теоретическим обобщениям.
Общим для рассмотренных выше задач является то, что в них стоит проблема поиска наибольшего или наименьшего (оптимального
) значения некоторой функции, отражающей цель управления системой, или, как еще говорят, целевой функции
. Поиск оптимального значения осуществляется на некотором подмножестве допустимых значений переменных, описывающих состояние этой системы, именуемом множеством допустимых планов
.
Пусть на некотором множествеD
определена функцияf(x).
Напомним, что точка х*
, принадлежащая D (х
*
Î
D
),
называется точкой глобального максимума
, если для любого xÎ
D выполняется неравенствоf(x) ≤ f(x*).
В этом случае значение f(x*)
называется глобальным максимумом функции
. Точка х̀́
называется точкой локального максимума
, если существует некоторая окрестность этой точки, в любой точке которой значение функции меньше, чем в х́̀
(f(x) ≤ f(x́̀)).
По аналогии, с точностью до знака неравенства, определяются глобальный
и локальный
минимумы
. Обобщающим понятием для максимума и минимума является таксой термин, как экстремум (оптимум).
Необходимо отметить, что далеко не всегда весь комплекс целей и задач, стоящий перед моделируемым объектом, может быть выражен в форме некоторой целевой функции. Более того, осознание и осмысление этой проблемы стало своего рода переломным этапом в истории развития исследования операций как науки, положившим конец многим необоснованным ожиданиям и одновременно давшим толчок к развитию новых направлений, связанных с методами многокритериальной оптимизации. Однако следует иметь в виду, что все они базируются на фундаменте методов однокритериальной оптимизации, без ясного понимания которых невозможна работа с более сложным математическим аппаратом.
Как уже отмечалось выше, работа с данной книгой предполагает знакомство читателя с классическими методами поиска экстремума, основывающимися на аппарате дифференциального исчисления. Но непосредственное применение классических методов для оптимизации функций, зависящих от большого числа переменных, при наличии значительного количества ограничений наталкивается на серьезные вычислительные трудности, что делает соответствующий аппарат неэффективным.
Мощным инструментом разрешения подобного рода задач стали специальные методы поиска экстремума, составляющие содержание раздела исследования операций, который называется математическое программирование
. В данном случае понятие программирование употребляется в смысле планирование
(в отличие от программирования для ЭВМ).
В свою очередь, в зависимости от вида решаемых задач, в математическом программировании выделяют такие области, как линейное, нелинейное, дискретное, динамическое, геометрическое, стохастическое
программирование. Первые четыре раздела, а также их применение для решения экономических задач составили содержание последующих глав.
ГЛАВА 1. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
1.1. ПОСТАНОВКА ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ
1.1.1. Формы задачи линейного программирования.
В общем виде задача линейного программирования* (в дальнейшем ЗЛП) может быть сформулирована как задача нахождения наибольшего значения линейной функции

на некотором множествеD
Ì
Rn
, где х
Î
D
удовлетворяют системе ограничений

и, возможно, ограничениям
х
1
≥0,х
2
≥0,..., х
j
≥0,...,х
n
≥0. (1.3)
* Напомним, что частные примеры, сводящиеся к задаче линейного программирования, были описаны во введении.
Не умаляя общности, можно считать, что в системе (1.2) первые m
ограничений являются неравенствами, а последующие —l
-уравнениями. Очевидно, этого всегда можно добиться за счет простого переупорядочения ограничений. Относительно направления знака неравенства будем предполагать, что левая часть меньше или равна правой. Добиться этого можно, умножив на (-1) обе части тех неравенств, которые имеют противоположный знак. Ограничения (1.3), вообще говоря, могут быть рассмотрены как частный случай ограничений в форме неравенств, но в силу особой структуры их обычно выделяют отдельно и называют условиями неотрицательности
(или тривиальными ограничениями).
Дополнительно следует заметить, что выбор типа искомого экстремума (максимума или минимума) также носит относительный характер. Так, задача поиска максимума функции

эквивалентна задаче поиска минимума функции

Часто условия задачи (1.1)-(1.3), содержащей ограничения только типа неравенств, бывает удобно записывать в сокращенной матричной форме
f(x)
= сх
→ max, Ax
≤
b
, х
≥ 0, (1.6)
где с
их
— векторы из пространстваRn
,
b
— вектор из пространстваRm
, а А
— матрица размерности m
х n
.
Задачу линейного программирования, записанную в форме (1.1)-(1.3), называют общей задачей линейного программирования
(ОЗЛП).
Если все ограничения в задаче линейного программирования являются уравнениями и на все переменные х
j
наложены условия неотрицательности, то она называется задачей линейного программирования в канонической форме, или канонической задачей линейного программирования
(КЗЛП). В матричной форме КЗЛП можно записать в следующем виде:

Поскольку любая оптимизационная задача однозначно определяется целевой функцией f
и областьюD
, на которой отыскивается оптимум (максимум), будем обозначать эту задачу парой (D
, f
).
Условимся относительно терминологии, которая используется в дальнейшем и является общепринятой в теории линейного программирования.
Планом
ЗЛП называется всякий вектор х
из пространства Rn
.
Допустимым планом
называется такой план ЗЛП, который удовлетворяет ограничениям (1.2)-(1.3), т. е. содержится в области D.
Сама область D
называется при этом областью допустимых планов
. Оптимальным планом
х*
называется такой допустимый план, при котором целевая функция достигает оптимального (в нашем случае — максимального) значения, т. е. план, удовлетворяющий условию
max f(x) = f(x*).
Величина f
* =
f
(х*)
называется оптимальным значением целевой функции.
Решением задачи
называется пара (х
*
,
f*
), состоящая из oптимального плана и оптимального значения целевой функции, а процесс решения
заключается в отыскании множества всех решений ЗЛП.
1.1.2. Переход к канонической форме
. Подавляющее большинство известных методов решения задач линейного программирования предназначены для канонических задач. Поэтому начальный этап решения всякой общей задачи линейного программирования обычно связан с приведением ее к некоторой эквивалентной канонической задаче.
Общая идея перехода от ОЗЛП к КЗЛП достаточно проста:
- ограничения в виде неравенств преобразуются в уравнения за счет добавления фиктивных неотрицательных переменных х
i
,
(i
Î
1:m)
, которые одновременно входят в целевую функцию с коэффициентом 0, т. е. не оказывают влияния на ее значение;
- переменные, на которые не наложено условие неотрицательности, представляются в виде разности двух новых неотрицательных переменных:
- = - =
х
j
=
хj
– х
j
,
(xj
≥
0,
хj
≥
0).
Проиллюстрируем применение описанных выше рекомендаций на примере. Пусть задана задача линейного программирования(D, f)
в общей форме с целевой функцией
f(x)
= 5х
1
+ 3x
2
+ x
3
+ 2х
4
-2х
5
→ max
и множеством допустимых планов D
, определенным системой уравнений и неравенств,
| 2х
1
|
+ 4х
2
|
+ 5x
3
|
=7, |
| - 3x
2
|
+ 4x
3
|
– 5x
4
– 4x
5
|
≤ 2, |
| 3х
1
|
- 5x
3
|
+ 6x
4
– 2x
5
|
≤ 4, |
| х
1
≥ 0, |
x
3
|
≥ 0. |
Тогда в соответствии со сформулированными правилами эквивалентная каноническая задача будет иметь вид (D',f'
), где:

а множество D'
определено как:
Нетрудно заметить, что «платой» за переход от общей формы задачи линейного программирования к канонической является рост ее размерности, что, при прочих равных условиях, является фактором, усложняющим процесс решения.
1.2. ОСНОВНЫЕ СВОЙСТВА ЗЛП И ЕЕ ПЕРВАЯ ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ
1.2.1. Основные понятия линейной алгебры и выпуклого анализа, применяемые в теории математического программирования
. Кратко напомним некоторые фундаментальные определения и теоремы линейной алгебры и выпуклого анализа, которые широко применяются при решении проблем как линейного, так и нелинейного программирования.
Фундаментальным понятием линейной алгебры является линейное (вещественное) пространство
. Под ним подразумевается множество некоторых элементов (именуемых векторами
или точками
), для которых заданы операции сложения и умножения на вещественное число (скаляр), причем элементы, являющиеся результатом выполнения операций, также в соответствии с определением должны принадлежать исходному пространству.
Частными случаями линейных пространств являются вещественная прямая, плоскость, геометрическое трехмерное пространство.
Вектор λ1
a
1
+ λ2
a
2
+ …+ λm
a
m
называется линейной комбинацией
векторов а
1
а
2
,..., а
m
с коэффициентами λ1
, λ2,
λm
,
Система векторов линейного пространства а
1
а
2
,..., а
m
называется линейно зависимой
, если существуют такие числа λ1
, λ2,
λm
не равные одновременно нулю, что их линейная комбинация λ1
a1
+ λ2
a2
+ …+ λm
am
равняется нулевому вектору (вектору, все компоненты которого равны нулю). В противном случае систему а
1
,а
2
,..., а
m
называют линейно независимой
, т. е. линейная комбинация данных векторов может быть равна нулевому вектору только при нулевых коэффициентах λ1
, λ2,
…, λm
Максимально возможное количество векторов, которые могут образовывать линейно независимую систему в данном линейном пространстве, называют размерностью пространства
, а любую систему линейно независимых векторов в количестве, равном размерности, — базисом пространства
.
Линейное пространство обычно обозначают какRn
, где n
— его размерность.
Любое подмножество данного линейного пространства, которое само обладает свойствами линейного пространства, называется линейным подпространством.
Множество Н
, получаемое сдвигом некоторого линейного подпространстваL
Ì
Rn
на векторa
Î
Rn
: H=L+a
, называется аффинным множеством
(пространством). Если фундаментальным свойством любого линейного пространства или подпространства является принадлежность ему нулевого вектора, то для аффинного множества это не всегда так. На плоскости примером подпространства является прямая, проходящая через начало координат, а аффинного множества — любая прямая на плоскости. Характеристическим свойством аффинного множества является принадлежность ему любой прямой, соединяющей две любые его точки. Размерность аффинного множества совпадает с размерностью того линейного подпространства, сдвигом которого оно получено.
Если рассматривается некоторое линейное пространствоRn
, то принадлежащие ему аффинные множества размерности 1 называются прямыми,
а размерности (n
-1)—гиперплоскостями
. Так, обычная плоскость является гиперплоскостью для трехмерного геометрического пространства R3
, а прямая — гиперплоскостью для плоскости R
2
. Всякая гиперплоскость делит линейное пространство на два полупространства.
Множество V векторов (точек) линейного пространства R
n
называется выпуклым,
если оно содержит отрезок прямой, соединяющей две его любые точки, или, другими словами, из того, чтоa
Î
V
и b
Î
V
, следует, что х
= (1- λ) х а+
λ
хb
ÎV
, где 0 ≤λ≤ 1.
Линейная комбинация

векторов а
1
,а
2
... а
m
называется выпуклой
, если λi
≥0, iÎ1:m
и

Множество, содержащее все возможные выпуклые комбинации точек некоторого множества М
, называют выпуклой оболочкой
данного множества. Можно показать, что выпуклая оболочка множества М
является наименьшим выпуклым множеством, содержащим М
.
Выпуклая оболочка конечного множества точек называется выпуклым многогранником
, а непустое пересечение конечного числа замкнутых полупространств — многогранным выпуклым множеством
. В отличие от выпуклого многогранника последнее может быть неограниченным.
Точкаv
выпуклого множества V
называется его угловой (крайней)
точкой, если она не является внутренней точкой ни для какого отрезка, концы которого принадлежат множеству V
. Угловые точки выпуклого многогранника являются его вершинами,
а сам он — выпуклой оболочкой
своих вершин.
Множество К
называется конусом
с вершиной в точкеx0
, еслиx
0
ÎК
, и из того, что некоторая точка х
принадлежит К ( х
Î К
), следует, что в К
содержится и луч, начинающийсяв х0
и проходящий через х
, т. е.

или

Выпуклая оболочка конечного множества лучей, исходящих из одной точки, называется многогранным выпуклым конусом
с вершиной в данной точке.
1.2.2. Первая геометрическая интерпретация ЗЛП и графический метод решения
. Рассмотрим следующий пример. Пусть дана задача максимизации линейной целевой функции
f(x)
= 3х
1
+ х
2
→ max
на множестве
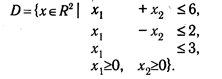
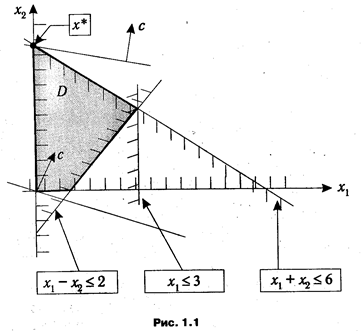
Так как количество переменных в неравенствах, задающих область допустимых планов задачи, равно двум, то ее можно изобразить на координатной плоскости (см. рис. 1.1
).
На рис. 1.1
показано, что каждое неравенство определяет некоторую полуплоскость. Соответствующие области для каждого ограничения отмечены штрихами. Пересечение D данных полуплоскостей (т. е. множество точек, которые одновременно принадлежат каждой их них) является областью допустимых планов задачи. Поведение целевой функции f(x)
= 3х
1
+ х
2
в рамках двумерной иллюстрации может быть охарактеризовано с помощью линий уровня.
Напомним, что линией уровня функции
называется множество точек из ее области определения, в которых функция принимает одно и то же фиксированное значение. Градиентом
функцииf(x)
называется вектор
Δf(x) = df
,…, df
dx
1
dxn
указывающий направление наиболее быстрого возрастания функции, и, стало быть, ориентированный перпендикулярно линиям уровня.
Для линейной функции двух переменных линия уровня представляет собой прямую, перпендикулярную вектору с
, который служит градиентом данной функции. Следовательно, если линия уровня определяется уравнениемf(x)=c1
x1
+ c2
x2
=const
, то этот вектоp имеет вид

и указывает направление возрастания функции.
Таким образом, с геометрической точки зрения задача максимизации сводится к определению такой точки области D
, через которую проходит линия уровня, соответствующая наибольшему из возможных значений. Последнее означает, что для нахождения точки экстремума в задаче линейного программирования мы должны сначала построить линию уровня для некоторого произвольного значения целевой функции. Затем необходимо осуществлять ее параллельное передвижение (так, чтобы она оставалась перпендикулярной вектору с
) до тех пор, пока не достигнем такой точки области допустимых планов D
, из которой смещение в направлении вектора с
было бы невозможно. Такой метод решения получил название графического
. Заметим, что решение задачи поиска минимума линейной функции осуществляется аналогично, с той лишь разницей, что движение по линиям уровня должно производиться в направлении, обратном градиенту целевой функции, т. е. по вектору (-с
).
На рис. 1.1
изображен некоторый частный случай, для которого решение ЗЛП достигается в угловой точке х*
= (0, 6) области D
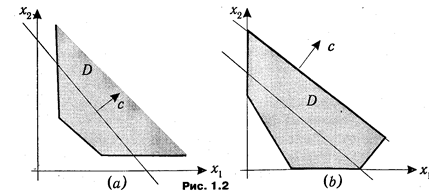
. Нетрудно представить, что возможны и другие варианты. Они изображены на рис. 1.2.
Рисунок (а
) иллюстрирует ситуацию неограниченности целевой функцииf(x)=cx
на множестве D
, т.е. сколько бы мы ни перемещались по линиям уровня в направлении вектора с
, ее значение будет возрастать.
В случае, изображенном на рисунке (b
), линия уровня, соответствующая максимальному значениюf(x),
касается грани множестваD
, и, соответственно, все точки, лежащие на этой грани, являются оптимальными планами.
Во всех рассмотренных иллюстрациях допустимые планы ЗЛП представлялись в виде некоторого многогранного выпуклого множества на плоскости. Такое их представление в литературе получило название первой геометрической интерпретации задачи линейного программирования
.
Заметим также, что аналогичным образом могут быть построены интерпретации ЗЛП для случая трехмерного пространстваR
3
, где множеству D
будет соответствовать некоторый ограниченный или неограниченный многогранник, а поведение целевой функции будет характеризоваться поверхностями (плоскостями) уровня.
Несмотря на свою очевидную ограниченность, графический метод решения ЗЛП часто оказывается полезным. В частности, он может быть применен не только к задачам с двумя переменными и ограничениями в виде неравенств, но и к каноническим задачам вида (1.7), у которых n
-
m
= 2, где n
— количество переменных, а m
— ранг матрицы А
.
Действительно, можно выбрать две произвольные переменные х
j1
,xj2
и, используя систему уравнений, выразить через них остальные переменные

где φj
(xj
1
, xj
2
) —линейные функции.
Подставив выражения (1.9) в целевую функцию, мы получим эквивалентную задачу

при ограничениях

Последняя ЗЛП может быть решена графически.
1.2.3. Основные теоремы линейного программирования
. Рассмотрим некоторые теоремы. Отражающие фундаментальные свойства задач линейного программирования и лежащие в основе методов их решения. Они по существу обобщают на случай задач с произвольным количеством переменных те свойства, которые мы наблюдали в двумерном случае.
Теорема 1.1
. Если целевая функция
f
принимает максимальное значение в некоторой точке множества допустимых планов D, то она принимает это значение и в некоторой угловой точке данного множества.
Доказательство.
Чтобы не усложнять изложение, ограничимся тем случаем, когда множество D
ограничено, и, следовательно, является выпуклым многогранником.
Для доказательства воспользуемся следующим известным свойством ограниченных выпуклых множеств:
| Если D — замкнутое ограниченное выпуклое множество, имеющее конечное число угловых точек, то любая точка х
Î
D может быть представлена в виде выпуклой комбинации угловых точек D
*
.
|
* Строгое доказательство данного утверждения см., например, в [14].
Пусть х
1
, х
2
,…,х
m
— угловые точки множестваD
, а х*
— точка, в которой целевая функция f
достигает максимума.
На основе сформулированного выше утверждения точку х*
можно представить в виде выпуклой комбинации угловых точек х
1
, х
2
,..., xm

Так как х*
— точка максимума, то для любого х
Î
D
сх
* ≥
сх
. Функцияf(x)
— линейная, поэтому
cледовательно,
где xr
— угловая точка, удовлетворяющая условию

Из (1.10) видно, что сх* ≤
сх
r
.В то же время справедливо обратное неравенство: сх*
≥
сх
r
. Откуда следует, что сх* = сх
r
, т. е. существует по крайней мере одна угловая точках
r
, в которой целевая функция принимает максимальное значение. -
Теорема 1.2
. Если целевая функция
f
принимает максимальное значение в нескольких точках множества D, то она принимает это же значение в любой точке, являющейся их выпуклой комбинацией.
|
Доказательство.
Пусть максимальное значение функции f
достигается в точках х̃
1
, х̃
2
,...,x̃s
, т. е. сх
~i
=f*,
i
Î
l:s.
Рассмотрим произвольную выпуклую комбинацию этих точек

Найдем значение целевой функции в точке х*

Итак, для произвольной выпуклой комбинации х*
точек х̃1
, х̃
2
,...,x~s
справедливо равенство

1.3. БАЗИСНЫЕ РЕШЕНИЯ И ВТОРАЯ
ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ ЗЛП
1.3.1. Векторная форма записи КЗЛП и ее применение
. Рассмотрим каноническую задачу линейного программирования

Обозначим через а
j
столбцы матрицы А
и будем рассматривать их как векторы пространстваRm
.
Тогда каждому допустимому плану КЗЛП — n
-мерному вектору х
— соответствует неотрицательная линейная комбинация столбцов а
j
, равная столбцуb
Î
Rm
:

Такое представление ограничений КЗЛП обычно называют векторной формой записи.
Векторы а
j
,
j
Î l:n
будем называть векторами требований
задачи (D,
f
), а вектор b
— вектором ограничений
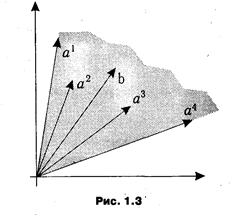
. Множество всех неотрицательных линейных комбинаций столбцов аj
с геометрической точки зрения может быть представлено как многогранный выпуклый конус, натянутый на систему векторов а
j
в пространстве R
m
(рис. 1.3).
Соответственно, вопрос о существовании допустимого плана задачи (D, f
) равнозначен вопросу о принадлежности вектора b
данному конусу, а компоненты х
j
некоторого допустимогоплана х
Î
D
являются не чем иным, как коэффициентами разложения вектора ограничений задачи
b
по векторам, требований а
j
.
Такое представление КЗЛП получило название второй геометрической интерпретации.
В дальнейшем без ограничения общности можем предполагать, что число уравнений, задающих множествоD
, меньше или равно числу переменных задачи (m ≤ n
). Действительно, если это не так, то либо система уравнений Ах
= b
несовместна (и, значит, множество D
пустое), либо содержит избыточные (линейно зависимые) уравнения.
Если некоторые т
столбцов а
j
1
,а
j
2
,...,а
jm
матрицы A
являются линейно независимыми, то они образуют базис в пространстве Rm
, и их, вообще говоря, будет достаточно для представления вектора b
в виде линейной комбинации указанных столбцов. Это означает, что остальные столбцы войдут в данное разложение с нулевыми коэффициентами. Если к тому же коэффициенты линейной комбинации окажутся неотрицательными, то мы получаем так называемый базисный допустимый план х
, у которого не более m
компонентов отличны от нуля. Сформулируем определение базисного плана более строго, так как это одно из фундаментальных понятий теории линейного пpогpаммиpования.
-Пусть задана некоторая каноническая ЗЛП
(D,f),
А —матрица системы ограничений задачи, и β= {а
j
1
, аj2,..., аj
m
} —линейно независимая система столбцов матрицы А, образующая базис
Rm
.
Обозначим множество номеров столбцов, входящих в систему
b
, через
N
(
β
)
= {
j
1
,
j2
,...,
jm
}. План х называется
базисным планом задачи
(D,f),
если его компоненты, соответствующие базисным столбцам и называемые базисными компонентами, больше или равны нулю (хj
≥
0,
j
Î
N
(
β
)},
а все остальные компоненты
(небазисные) — равны
нулю
(
xj
=
0,
j
Ï
N (
β)).
-Базисный план х называется
невырожденным, если все его базисные компоненты строго
положительны, и
вырожденным в противном случае.
1.3.2. Свойства базисных планов
. Следующая теорема трактует понятие базисного плана в терминах первой геометрической интерпретации ЗЛП.
| Теорема 1.3.
Каждый допустимый базисный план является угловой точкой множества допустимых планов D.
|
Доказательство.
Ради простоты положим, что базисными векторами являются первые m
столбцов матрицы A
, т. е. β={a
l
,a
2
,...,am
}. Тогда утверждение теоремы 1.3 может быть переформулировано следующим образом:
Если существует такой
n
-мерный вектор

что
x
1
a
1
+х
2
а
2
+...+x
k
ak
=b
, то х есть угловая точка множества D.
Проведем доказательство от противного, т. е. предположим, что рассматриваемый базисный план х
не является угловой точкой множества D
. Тогда ее можно представить в виде выпуклойкомбинации некоторых двух различных допустимых планов х
1
и х
2
:
x
= λx
1
+(1-λ)x
2
, 0<λ<1.
В координатной форме последнее утверждение означает

Поскольку последние (n
-
k
) компоненты вектора х
по предположению равны 0, а числа х
j
1
,xj
2
≥ 0 и λ, (1 -λ )>0, то эти же компоненты в векторах x
1
и х
2
также равны 0. Поэтому, с учетом допустимости планов х
1
и х
2
, можно утверждать, что

Вычитая из (1.15) (1.16), получим

Так как векторы а
1
,а
2
,...,а
k
— линейно независимы, то коэффициенты х
1
1
–х
2
1
=0,..., х
1
k
–х
2
k
=0, из чего следует, что x
1
=х
2
. Это противоречит предположению, что х
1
и х
2
являются различными угловыми точками множестваD
. Следовательно, х
не может быть представлен в виде выпуклой комбинации двух точек D
и по определению является угловой точкой данного множества. -
Интересно отметить, что справедливо и обратное утверждение, которое приведем без доказательства:
Если х — угловая точка множества D, то она является допустимым базисным планом задачи
(D, f).
В завершение параграфа необходимо отметить практическое значение установленной связи между угловыми точками и допустимыми базисными решениями: она позволяет формализовать (и тем самым существенно упростить) процесс перехода от одной угловой точки к другой.
1.4. СИМПЛЕКС-МЕТОД
1.4.1. Основные этапы симплекс-метода
. Исходя из свойств линейных экстремальных задач, рассмотренных в предыдущих параграфах, можно заключить, что на принципиальном уровне поиск их решений сводится к последовательному перебору угловых точек множества допустимых планов или, что то же самое, перебору соответствующих допустимых базисных планов. Следует подчеркнуть, что такой перебор для реальных многомерных задач возможен только в теоретическом плане и на практике неосуществим (или крайне неэффективен) даже при условии использованиямощной вычислительной техники. Средством решения данной проблемы явились прикладные оптимизационные методы, основанные на последовательном, целенаправленном переборе базисных планов ЗЛП.
Классическим методом решения ЗЛП стал симплекс-метод
, получивший также в литературе название метода последовательного улучшения плана
, разработанный в 1947г. американским математиком Джорджем Данцигом.
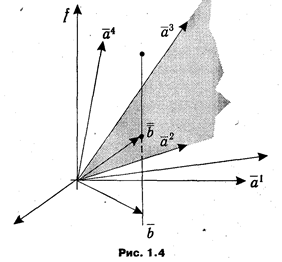
Идея такого перехода от одного базисного плана к другому, при котором происходит «улучшение» значения целевой функции, может быть продемонстрирована для случая m
= 2 с помощью рис. 1.4.
Если вектор ограничений b принадлежит конусу, натянутому на некоторые два базисных вектора условий {аj
1
,аj
2
}, то существует такой базисный план х
с базисными компонентами х
j1
,
х
j2
,
чтоb=
х
j1
aj1
+ х
j2
aj2
. Разумеется, таких планов может быть несколько в зависимости от выбора системы базисных векторов. Чтобы различать их по соответствующей величине целевой функцииf(x)=cj
1
xj
1
+с
j
2
х
j
2
, вводятся так называемые расширенные векторы условий
и ограничений
. В общем случае расширенный столбец условийāj
получается соединением коэффициента целевой функции с
j
и столбца а
j
:

расширенный вектор ограничений
определим как

В дальнейшем для удобства нумерации элементов будем считать, что добавляемый коэффициент целевой функции с
j
является нулевым элементом j
-го расширенного столбца условий, т. е.ā0,j
=
с
j
. При изображении расширенных векторов нулевая координата откладывается вдоль вертикальной оси — оси аппликат.
Рассмотрим также вектор

=
Геометрически определение вектора b
означает, что он принадлежит конусу, натянутому на расширенные векторы, а вектор служит его проекцией. Нулевая координата вектора b
имеет вид:

т. е. равна значению целевой функции для выбранного базисного плана.
Из геометрической иллюстрации следует, что для решения задачи мы должны среди векторов а
j
выбрать такой набор {а
j
1
,а
j
2
}, чтобы, прямая, проведенная через конец вектора параллельно оси аппликат, пересекала конус, натянутый на систему соответствующих расширенных столбцов {
āj
1
,
āj
2
}, в «наивысшей» точке.
На рис. 1.4
выделен конус, натянутый на систему расширенных столбцов ā
2
и ā
3
, отвечающих текущему допустимому базису. Нетрудно заметить, что данный базис не является оптимальным, например, для базиса {а3
, а4
} точка пересечения соответствующего конуса и прямой будет находиться выше. Можно, наоборот, указать базис с «худшим» значением целевой функции: {а
1
а2
}. Наконец, рассматриваемая геометрическая интерпретация КЗЛП иллюстрирует и общую идею критерия, который используется в симплекс-методе для определения оптимальности (или неоптимальности) текущего плана: если существуют векторы-столбцы, лежащие выше плоскости,
проходящей через векторы текущего базиса, то он не является оптимальным и может быть «улучшен».
С вычислительной точки зрения критерий оптимальности в симплекс-методе реализуется через нахождение специальных оценок для небазисных векторов-столбцов, относительно текущего базиса.
Для удобства дальнейшего изложения введем некоторые обозначения. Учитывая то, что симплекс-метод представляет собой некоторый итеративный вычислительный процесс, то черезq
будем обозначать номер очередной (текущей) итерации. Соответственно, набор базисных столбцов, получаемых на q
-й итерации, будет обозначаться как β
(
q
)
:

Для того чтобы было легче отличить номер итерации от номеров компонентов матриц и векторов, он заключен в круглые скобки. Номера столбцов, входящих в базис, обозначим через N
(β(q)
), а именно

При этом Nr
(β(q)
) =jr
— номер столбца, занимающего r
-ю позицию в базисе. Тогда текущий базисный план х
имеет вид:

Обозначим через Δ(ß(q)
) матрицу, составленную из столбцов {аj
1
, аj
2
,..., аjm
}, образующих базис, через Δ(ß(q)
) матрицу, образованную из соответствующих расширенных столбцов и дополненную слева столбцом специального вида:
 а через ∆-1
(β(q)
) и ∆-1
(β(q)
) — матрицы, обратные по отношению к ним. Также представляется удобным ввести отдельные обозначения для элементов матрицы ∆-1
(β(q)
): а через ∆-1
(β(q)
) и ∆-1
(β(q)
) — матрицы, обратные по отношению к ним. Также представляется удобным ввести отдельные обозначения для элементов матрицы ∆-1
(β(q)
):
 δi
(β(q)
) — i
-я строка матрицы ∆ˉ-1
(β(q)
), (i
Î
0: m
); δi
(β(q)
) — i
-я строка матрицы ∆ˉ-1
(β(q)
), (i
Î
0: m
);
 δij
(β(q)
) — элемент матрицы ∆-1
(β(q)
), находящийся в i
-й строке j
-го столбца (i
Î
0: m
, j
Î
0 : m
). δij
(β(q)
) — элемент матрицы ∆-1
(β(q)
), находящийся в i
-й строке j
-го столбца (i
Î
0: m
, j
Î
0 : m
).
Расширенный вектор ограничений b
представляется в виде линейной комбинации расширенных векторов условий с коэффициентами, равными базисным компонентам текущего базисного плана:

  Если интерпретировать компоненты векторов аj
и b
как координаты в ортогональном базисе, то их столбцы координат относительно произвольного базиса (β(q)
), дополненного единичным вектором (-1,0,..., 0), направленным противоположно оси аппликат примут вид: Если интерпретировать компоненты векторов аj
и b
как координаты в ортогональном базисе, то их столбцы координат относительно произвольного базиса (β(q)
), дополненного единичным вектором (-1,0,..., 0), направленным противоположно оси аппликат примут вид:

а для расширенной матрицы задачи в целом можно записать

Нулевая строка данной матрицы a
0
(β(q
)
) содержит координаты расширенных векторов условий по оси аппликат. Согласно построению, элементы данной строки имеют следующие знаки:
- a
0,j
(β(q
)
) < 0 — для расширенных векторов условий, расположенных выше плоскости, натянутой на систему расширенных базисных векторов;
- a
0,j
(β(q
)
)> 0 — для расширенных векторов условий, расположенных ниже плоскости, натянутой на систему расширенных базисных векторов;
- a
0,j
(β(
q
)
) = 0 — для расширенных базисных векторов.
Подводя итог сказанному, сформулируем критерий оптимальности допустимого базисного плана
в симплекс-методе:
-план является оптимальным, если для всех
j
Î1:n
a
0,j
(β(q
)
) ≥ 0, и неоптимальным в противном
случае, т. е. если существует такое l
Îl : n
, что a
0l
(β(q
)
) < 0.
Значения a
0,j
(β(q
)
)также называют оценками столбцов матрицы А
относительно текущего базиса, или симплекс-разностями.
В случае неоптимальности текущего базиса в алгоритме симплекс-метода осуществляется переход к следующему базису. Это делается за счет вывода одного столбца из базиса и ввода другого. Для обеспечения улучшения значения целевой функции в базис должен быть введен вектор-столбец, имеющий отрицательную оценку. Если таких столбцов несколько, то для ввода рекомендуется выбирать столбец
, имеющий максимальную по модулю оценку
. Отметим, что данное правило носит относительный характер и не гарантирует наилучшего выбора вводимого столбца. Одновременно на этой стадии требуется принять решение о том, какой столбец следует вывести из базиса. Сделать это нужно таким образом, чтобы вновь формируемый базис оказался допустимым. Данное требование может быть легко проиллюстрировано для случая m
= 2. Например, на рис. 1.3
векторы {а
2
,а
3
} образуют допустимый базис, а векторы {а
3
,a
4
} —недопустимый, т. к. разложение b
по а
3
и а
4
содержит один отрицательный компонент плана, что противоречит условиям КЗЛП.
Можно доказать, что допустимость базиса, к которому осуществляется переход, обеспечивается следующим правилом вывода столбца из текущего базиса:
-для столбца
l
, претендующего на ввод в базис, и вектора ограничений
b
рассматриваются
отношения

и определяется такая строка
r
, что

Полученный индекс
r
определяет номер столбца в
N
(β(q
)
), выводимого из базиса, а именно
, N
(β(q
)
).
Таким образом, если базис на q
-й итерации включал столбцы с номерами

то базис на итерацииq
+ 1 будет состоять из столбцов с номерами:

 Отдельно следует обсудить тот случай, когда столбец al
(β(q
)
), претендующий на ввод в базис, не содержит положительных компонентовal
(β(q
)
) ≤ 0). Это означает, что целевая функция в задаче не ограничена на множестве допустимых значений, т. е. может достигать сколь угодно большого значения. Последнее, очевидно, означает завершение процесса вычислений ввиду отсутствия оптимального плана.
Геометрически ситуация, когда al
(β(q
)
) ≤ 0, соответствует тому, что ось ординат оказывается внутри конуса, натянутого на систему расширенных столбцов а
j
, а значит, прямая, проведенная через конец вектора b
параллельно оси аппликат, однажды «войдя» в этот конус, более никогда из него «не выходит». Отдельно следует обсудить тот случай, когда столбец al
(β(q
)
), претендующий на ввод в базис, не содержит положительных компонентовal
(β(q
)
) ≤ 0). Это означает, что целевая функция в задаче не ограничена на множестве допустимых значений, т. е. может достигать сколь угодно большого значения. Последнее, очевидно, означает завершение процесса вычислений ввиду отсутствия оптимального плана.
Геометрически ситуация, когда al
(β(q
)
) ≤ 0, соответствует тому, что ось ординат оказывается внутри конуса, натянутого на систему расширенных столбцов а
j
, а значит, прямая, проведенная через конец вектора b
параллельно оси аппликат, однажды «войдя» в этот конус, более никогда из него «не выходит».
    Вообще говоря, после перехода от базиса β(q
)
к базису β(q
+1)
мы можем заново сформировать матрицы ∆ (β(q+
1)
), Δ-1
(β(q
+1)
) и, вычислив А
(β(q
+1)
) = Δ-1
(β(q
+1)
)A
, делать выводы о его оптимальности. Однако, учитывая, что β(q
+1)
отличается от β(q
)
всего лишь одним столбцом, с точки зрения техники вычислений представляется рациональным непосредственно переходить от A
(β(q
)
) иb
(β(q
)
) к A
(β(q
+1)
) иb
(β(q
+1)
) . Дело в том, что у матриц типа A
(β(q
)
) столбцы, соответствующие базисным векторам, состоят из нулей, за исключением одного элемента, равного единице. Позиция этого ненулевого элемента определяется порядковым номером базисного столбца в N
(β(q
)
). Поэтому для получения матрицы A
(β(q
+1)
) достаточно с помощью линейных операций над строками матрицы A
(β(q
)
) привести ее столбец, соответствующий вводимому в базис вектору, к «базисному» виду. Вообще говоря, после перехода от базиса β(q
)
к базису β(q
+1)
мы можем заново сформировать матрицы ∆ (β(q+
1)
), Δ-1
(β(q
+1)
) и, вычислив А
(β(q
+1)
) = Δ-1
(β(q
+1)
)A
, делать выводы о его оптимальности. Однако, учитывая, что β(q
+1)
отличается от β(q
)
всего лишь одним столбцом, с точки зрения техники вычислений представляется рациональным непосредственно переходить от A
(β(q
)
) иb
(β(q
)
) к A
(β(q
+1)
) иb
(β(q
+1)
) . Дело в том, что у матриц типа A
(β(q
)
) столбцы, соответствующие базисным векторам, состоят из нулей, за исключением одного элемента, равного единице. Позиция этого ненулевого элемента определяется порядковым номером базисного столбца в N
(β(q
)
). Поэтому для получения матрицы A
(β(q
+1)
) достаточно с помощью линейных операций над строками матрицы A
(β(q
)
) привести ее столбец, соответствующий вводимому в базис вектору, к «базисному» виду.
Для это применяется преобразование Жордана—Гаусса
(так называемый метод полного исключения). В данном случае оно состоит в том, что мы должны «заработать» единицу на месте элемента ar,l
(β(q
)
) (он обычно называется ведущим
)* и нули на месте остальных элементов столбца al
(β(q
)
). Первое достигается посредством деления r
-й строки на ведущий элемент, второе — путем прибавления вновь полученной r
-й строки, умноженной на подходящий коэффициент, к остальным строкам матрицы A
(β(q
)
).
* Напомним, что l
— номер столбца, вводимого в базис, а r
— номер строки в симплекс-таблице, определяющей номер столбца, выводимого из базиса.
Формально результат выполнения данного преобразования над элементами A
(β(q
)
) и b
(β(q
)
) может быть выражен в следующем виде

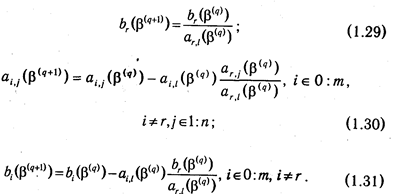
Следует особо отметить смысл элементов вектора b
(β(q
)
). Его нулевой компонент b
0
(β(q
)
) в соответствии с построением содержит значение целевой функции
, достигаемое ею на текущем плане

а остальные элементы — ненулевые компоненты этого плана:

Название метода произошло от понятия симплекса. Напомним, что m
-симплексом
называют выпуклый многогранник, аффинная оболочка* которого есть аффинное множество размерности m
. В данном случае можно считать, что система расширенных базисных столбцов {а
j
1
,а
j
2
,..., а
jm
}, рассматриваемых как точки в Rm
+1
, порождает (m
-1)-мерный симплекс в пространствеRm
+1
.
*Аффинной оболочкой
множества называют наименьшее аффинное множество, в котором содержится данное множество.
В заключение настоящего пункта обобщим изложенные вопросы и приведем схему алгоритма симплекс-метода для решения задачи максимизации.
Она включает однократно выполняемый 0-этап и повторяемый конечное число раз I-этап (стандартную итерацию).
0-этап. Нахождение допустимого базисного плана
(см. п. 1.4.5). Результатом 0-этапа является допустимый базисный план х
(β(1)
), а также соответствующие ему матрица A
(β(1)
) и вектор b
(β(1)
), которые будут использованы на первой итерации. Полагаем номер текущей итерацииq
равным 1 и переходим к I-этапу.
I
-этап. Стандартная итерация алгоритма
— выполняется для очередного базисного плана x
(β(q
)
).
1°. Проверка оптимальности
текущего базисного плана:осуществляется просмотр строки оценок а
0
(β(q
)
). Возможны два варианта:
1′. a
0
(β(q
)
)≥0 — план, соответствующий текущему базису задачи, оптимален
. Вычислительный процесс закончен. Согласно формулам (1.33) и (1.32) выписываются оптимальный план задачи х
*
= x
(β(q
)
) и значение целевой функции f
(x
*
)=f
(x
(β(q
)
)).
1″. В строке оценок а
0
(β(q
)
) существует по меньшей мере один элемент а
0,j
(β(q
)
)<0, т. е. имеющий отрицательную оценку. Следовательно, план x
(β(q
)
) —неоптимален.
Выбирается столбец с номером l
, имеющий минимальную (максимальную по абсолютной величине) отрицательную оценку

Он называется ведущим
и должен быть введен в очередной базис
. Переходим к пункту 2° алгоритма.
2°. Определение столбца, выводимого из базиса
. Рассматривается ведущий столбеца
l
(β(q
)
) Возможны два варианта:
2'. Для всех i
Î1:m
а
i,l
(β(q
)
)≤0. Делается вывод о неограниченности целевой
функции и завершается вычислительный процесс.
 2". Существует по крайней мере одна строка с номером i
Î1:m
, для которой а
i,l
(β(q
)
)>0 . Согласно правилу (1.27) определяются место r
и номер N
r
(β(q
)
)=jr
для столбца, выводимого из базиса. Переходим к пункту 3° алгоритма. 2". Существует по крайней мере одна строка с номером i
Î1:m
, для которой а
i,l
(β(q
)
)>0 . Согласно правилу (1.27) определяются место r
и номер N
r
(β(q
)
)=jr
для столбца, выводимого из базиса. Переходим к пункту 3° алгоритма.
3°. Пересчет элементов матрицы А и столбца
b
относительно нового базиса. В соответствии с формулами (1.28)-(1.31) осуществляем расчет элементов матрицы задачи А
и вектора ограничений b
относительно базиса β(q+
1)
, который получается после введения в базис β(q
)
столбца а
l
и выводом из него столбца а
r
. Полагаем номер текущей итерацииq
: = q
+l и переходим к первому пункту алгоритма.

Рис.1.5
1.4.2. Табличная реализация симплекс-метода
. С точки зрения обеспечения рациональности и наглядности вычислительного процесса выполнение алгоритма симплекс-метода удобно оформлять в виде последовательности таблиц. В различных источниках приводятся разные модификации симплекс-таблиц, отличающиеся друг от друга расположением отдельных элементов. Однако это не должно вызывать смущения у читателя, так как все они базируются на одних и тех же принципах. Остановимся на структуре таблицы, показанной на рис. 1.5.*
* Настоящая структура симплекс-таблиц строится на идеях и принципах их организации, предложенных в [1].
Симплекс-таблица Т(q
)
, изображенная на рис. 1.5
, соответствует допустимому базису КЗЛП β(q
)
), получаемому наq
-й итерации. Столбец N
(β(q
)
) содержит номера базисных столбцов (в той последовательности, в которой они входят в базис), столбец b
(β(q
)
) —компоненты вектора ограничений относительно текущего базиса β(q
)
,A
(β(q
)
) — компоненты матрицы задачи относительно текущего базиса β(q
)
. Наконец, в строке а
0
(β(q
)
) находятся текущие оценки столбцов, а ячейка b
0
(β(q
)
) содержит значение целевой функции, достигаемое для текущего плана.
Безусловно, следует добавить, что табличная модификация симплекс-метода имеет важное практическое значение нестолько как удобная форма организации ручного счета, сколько как основа для реализации данного алгоритма в рамках программного обеспечения ЭВМ.
1.4.3. Пример решения ЗЛП симплекс-методом
. Рассмотрим на конкретном примере процесс решения КЗЛП табличным симплекс-методом. Пусть дана каноническая задача ЛП:
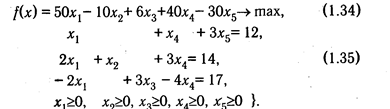
Как видно, столбцы матрицы с номерами {5, 2, 3} являются линейно независимыми. И можно получить разложение по данным столбцам вектора ограничений с положительными коэффициентами. Последнее означает, что столбцы {5, 2, 3} образуют допустимый базис, с которого можно начать решение задачи. Из столбцов, входящих в базис, с учетом нулевых элементов формируется матрица Δ(β(1)
) и обратная по отношению кнейΔ-1
(β(1)
):
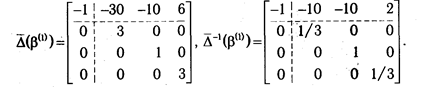
Используя их, по формуле (1.26) получаем

| -84 |
0 |
0 |
-88 |
0 |
| 1/3 |
0 |
0 |
1/3 |
1 |
| = |
2 |
1 |
0 |
3 |
0 |
; |
| -2/3 |
0 |
1 |
-4/3 |
0 |
Используя полученные значения A
(β(1)
) и b
(β(1)
), заполняем симплекс-таблицу T
(1)
, соответствующую первой итерации (q
=1).

Поскольку строка оценок a
0
(β(1)
) в первом и четвертом столбцах содержит отрицательные элементы (a
0,1
(β(1)
) = -84, a
0,4
(β(1)
) = -88), план х
(β(1)
) = (0,14,17/3,0,4) не является оптимальным, и значение целевой функции f
(x
(β(1)
)) = -226 может быть улучшено. Следуя рекомендации п.1˝ алгоритма симплекс-метода, полагаем номер вводимого в очередной базис столбца l
= 4 (т.к. |-88| > |-84|). Рассматриваем ведущий
столбец (выделен пунктирной рамкой)
Он содержит два положительных элемента. Применяя рекомендацию п. 2" алгоритма, получаем λ1
= 4/(1/3) =12, λ2
=14/3,и, стало быть r
= 2. Следовательно, столбец с номером N
2
(β(1)
) = 2 должен быть выведен из базиса. Таким образом, получаем очередной допустимый базис задачи N
(β(2)
) = {5, 4, 3}. Элемент a
2,3
(β(1)
) является ведущим (обведен кружком). Применив формулы (1.28)-(1.31), переходим к симплекс-таблице, соответствующей второй итерации T
(2)
, и полагаем индекс текущей итерацииq
= 2.
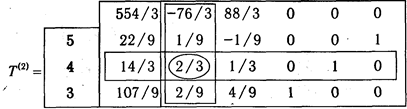
В ходе выполнения второй итерации опять-таки определяются вводимый столбец а
1
, выводимый а
4
и ведущий элемент a
2,1
(β(2)
). Перейдя к итерации q
= 3, имеем таблицу T
(3)
.

Как видно из T
(3)
, строка оценок содержит только неотрицательные значения, поэтому достигнутый базис N
(β(3)
) = {5, 1, 3} является оптимальным. В итоге мы получаем, что вектор х
*
=(7, 0, 31/3, 0, 5/3) является оптимальным планом (точкой максимума) задачи (1.34)-(1.35), максимальное значение целевой функции равно f
* =f
(х
*)=362, а решение КЗЛП имеет вид ((7, 0, 31/3, 0, 5/3); 362).
1.4.4. Сходимость симплекс-метода. Вырожденность в задачах ЛП
. Важнейшим свойством любого вычислительного, алгоритма является сходимость
, т. е. возможность получения в ходе его применения искомых результатов (с заданной точностью) за конечное число шагов (итераций).
Легко заметить, что проблемы со сходимостью симплекс-метода потенциально могут возникнуть на этапе выбора значения r
(п. 2") в случае, когда одинаковые минимальные значения отношения

будут достигнуты для нескольких строк таблицы Т(q
)
одновременно. Тогда на следующей итерации столбец b
(β(q
+1)
) будет содержать нулевые элементы. Напомним, что
-допустимый базисный план канонической задачи ЛП, соответствующий базису
β(q
)
, называется
вырожденным
, если некоторые его базисные компоненты равны нулю, т. е. вектор
b
(β(q
)
) содержит нулевые элементы.
Задача ЛП, имеющая вырожденные планы, называется вырожденной
. При «выходе» на вырожденный план мы фактически получаем разложение столбцаb
по системе из меньшего, чем m
, количества столбцов а
j
и, следовательно, лишаемся возможности корректно определить, ввод какого столбца в базис приведет к росту значения целевой функции. Подобные ситуации, в конечном счете, могут привести к зацикливанию вычислительного процесса, т. е. бесконечному перебору одних и тех же базисов.
С точки зрения первой геометрической интерпретации ЗЛП ситуация вырожденности означает, что через некоторую угловую точку многогранного множества допустимых планов задачи, соответствующую текущему базисному плану, проходит более чем m
гиперплоскостей ограничений задачи. Иными словами, одно или несколько ограничений в данной точке являются избыточными. Последнее предоставляет повод для размышлений об экономической стороне проблемы вырожденности как проблемы наличия избыточных ограничений и в некоторых случаях определяет пути ее решения.
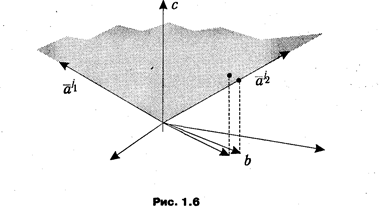
С точки зрения второй геометрической интерпретации ЗЛП вырожденность означает «попадание» линии, проходящей через вершину вектора b
параллельно оси аппликат, в ребро конуса, натянутого на систему расширенных векторов текущего базиса. Так, в случае, изображенном на рис. 1.6
, эта линия попадает в ребро, определяемое вектором а
j
2
, т. е., несмотря на то что текущий базис содержит столбцы а
j
1
и а
j
2
, для представления вектора b
достаточно только одного а
j
2
.
Из данной интерпретации вытекает и идея метода решения вырожденных задач ЛП, получившего названия метода возмущений
: при выходе на вырожденный план осуществляется незначительный сдвиг вектора b
и вырожденность (как это видно из иллюстрации) устраняется.
Необходимо, однако, сказать, что рассмотренная здесь проблема зацикливания для большинства практически значимых задач является достаточно редкой и маловероятной. Более того, она очень часто разрешается за счет ошибок округлений при выполнении расчетов на ЭВМ.
1.4.5. Нахождение допустимого базисного плана
. В рассмотренном выше примере исходный базисный план, необходимый для начала вычислений по симплекс-методу, был подобран за счет особенностей матрицы условий. Действительно, данная матрица уже содержала необходимое количество «почти базисных» столбцов. Очевидно, что для подавляющего большинства задач ЛП невозможно подобным образом сразу и в явном виде указать исходный допустимый базисный план. Вообще говоря, существуют различные приемы решения данной задачи. Мы остановимся на одном из них, получившем название метода минимизации невязок
. Его сильной стороной, безусловно, является универсальность. Xотя, в некоторых частных случаях, он может оказаться слишком громоздким.
Идея метода минимизации невязок состоит в построении соответствующей вспомогательной задачи, для которой можно в явном виде указать исходный базисный план, и решении ее с помощью процедуры симплекс-метода.
Не умаляя общности, можно считать, что вектор ограничений в исходной задаче неотрицателен, т. е. bi
≥ 0,i
Î 1: m
. Тогда для КЗЛП максимизации функции

на множестве, определяемом ограничениями
строится вспомогательная задача

Как видно из (1.36)-(1.39), задача ( , , ) отличается от задачи (D,
f
) матрицей, получаемой в результате добавления кисходной матрице А
единичной матрицы, которой соответствуют дополнительные (фиктивные) переменные х
n
+1
,...,х
n+m
. Данным переменным (собственно говоря, их и называют невязками
) в целевой функции
отвечают коэффициенты (-1), а переменным х
1
,...,х
n
, которые являются общими для обеих задач, — нулевые коэффициенты. Существенной особенностью (,
) является наличие в ней очевидного исходного базиса, образуемого добавленными столбцами, и соответствующего плана с базисными компонентами хn+i
= bi
≥ 0, i
Î 1: m
. В силу структуры целевой функции f̃
в процесс поиска ее максимума процедурой симплекс-метода фиктивные переменные (невязки) хn+i
должны минимизироваться желательно до нуля, что может быть достигнуто за счет последовательного перевода их в небазисные компоненты плана. Если в оптимальном плане х̃
, полученном в результате решения вспомогательной задачи, последние m
компонент (т. е. невязки) равны нулю, то его начальные n
компонент удовлетворяют системе ограничений, определяющих область D
, и
) отличается от задачи (D,
f
) матрицей, получаемой в результате добавления кисходной матрице А
единичной матрицы, которой соответствуют дополнительные (фиктивные) переменные х
n
+1
,...,х
n+m
. Данным переменным (собственно говоря, их и называют невязками
) в целевой функции
отвечают коэффициенты (-1), а переменным х
1
,...,х
n
, которые являются общими для обеих задач, — нулевые коэффициенты. Существенной особенностью (,
) является наличие в ней очевидного исходного базиса, образуемого добавленными столбцами, и соответствующего плана с базисными компонентами хn+i
= bi
≥ 0, i
Î 1: m
. В силу структуры целевой функции f̃
в процесс поиска ее максимума процедурой симплекс-метода фиктивные переменные (невязки) хn+i
должны минимизироваться желательно до нуля, что может быть достигнуто за счет последовательного перевода их в небазисные компоненты плана. Если в оптимальном плане х̃
, полученном в результате решения вспомогательной задачи, последние m
компонент (т. е. невязки) равны нулю, то его начальные n
компонент удовлетворяют системе ограничений, определяющих область D
, и  легко (простым отбрасыванием невязок) может быть преобразован в стартовый допустимый план основной задачи (D, f
). При этом все строки симплекс-таблицы, полученной на последней итерации вспомогательной задачи (за исключением нулевой), могут быть перенесены в первую таблицу основной задачи. Элементы же нулевой строки для вновь формируемой симплекс-таблицы вычисляются по формулам:
легко (простым отбрасыванием невязок) может быть преобразован в стартовый допустимый план основной задачи (D, f
). При этом все строки симплекс-таблицы, полученной на последней итерации вспомогательной задачи (за исключением нулевой), могут быть перенесены в первую таблицу основной задачи. Элементы же нулевой строки для вновь формируемой симплекс-таблицы вычисляются по формулам:
где β(*)
— базис, полученный на последней итерации вспомогательной задачи.
В случае, когда оптимальный план вспомогательной задачи х̃
все же содержит не равные нулю фиктивные компоненты (т. е.
(
)<0), мы приходим к заключению об отсутствии допустимых планов
у исходной задачи (D,
f
), т. е.D
= Ø.
1.5. МОДИФИЦИРОВАННЫЙ СИМПЛЕКС-МЕТОД
 1.5.1. Вычислительная схема, основанная на преобразовании обратных матриц.
Анализируя вычислительную процедуру симплекс-метода с позиций оценки трудоемкости, нетрудно заметить, что наиболее критичным в этом плане является этап пересчета значений А
и b
при переходе от одного базисного плана к другому (п. 3 алгоритма). Однако в том случае, когда число ограничений задачи m
явно меньше количества переменных n
, можно добиться существенной «экономии», выполняя на очередной итерацииq
преобразование Жордана—Гауссане над матрицей А
(β(q
)
), а над матрицей Δ-1
(β(q
)
). При этом учитывается и то, что при необходимости, применяя формулу (1.26), всегда можно получить А
(β(q
)
)по Δ-1
(β(q
)
). Более того, для выполнения описанных выше действий симплекс-процедуры нам в действительности не требовалась матрица А
(β(q
)
)целиком. Реально в ней использовались только строка оценок a
0
(β(q
)
) и ведущий столбецal
(β(q
)
). Данные соображения положены в основу вычислительной схемы симплекс-метода, основанной на преобразовании обратных матриц, которую также называют модифицированным симплекс-методом
. Впервые данный алгоритм был предложен в 1951 г. в работах Л. В. Канторовича. 1.5.1. Вычислительная схема, основанная на преобразовании обратных матриц.
Анализируя вычислительную процедуру симплекс-метода с позиций оценки трудоемкости, нетрудно заметить, что наиболее критичным в этом плане является этап пересчета значений А
и b
при переходе от одного базисного плана к другому (п. 3 алгоритма). Однако в том случае, когда число ограничений задачи m
явно меньше количества переменных n
, можно добиться существенной «экономии», выполняя на очередной итерацииq
преобразование Жордана—Гауссане над матрицей А
(β(q
)
), а над матрицей Δ-1
(β(q
)
). При этом учитывается и то, что при необходимости, применяя формулу (1.26), всегда можно получить А
(β(q
)
)по Δ-1
(β(q
)
). Более того, для выполнения описанных выше действий симплекс-процедуры нам в действительности не требовалась матрица А
(β(q
)
)целиком. Реально в ней использовались только строка оценок a
0
(β(q
)
) и ведущий столбецal
(β(q
)
). Данные соображения положены в основу вычислительной схемы симплекс-метода, основанной на преобразовании обратных матриц, которую также называют модифицированным симплекс-методом
. Впервые данный алгоритм был предложен в 1951 г. в работах Л. В. Канторовича.
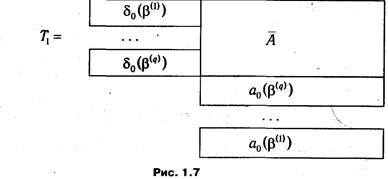
Вычислительной схеме модифицированного симплекс-метода соответствует система таблиц T
1
и Т
2
(q
)
. Таблица T
1
(рис. 1.7
) является общей для всех итераций и служит для получениястроки оценок текущего базисного плана a
0
(β(q
)
). Если обозначить через δi
(β(q
)
) (i
Î 0 : m
) строки матрицы Δ-1
(β(q
)
), то из (1.26), в частности, следует, что

Как видно из рис. 1.7
, T
1
состоит из трех блоков:
- в центре содержится матрица
А
;
- в левом блоке таблицы на каждой итерации дописываются нулевые строки матрицы
Δ-1
(β(q
)
)для текущего базиса
;
- нижний блок, расположенный под матрицей
А
, на каждой итерации дополняется строкой оценок текущего плана, вычисленной по формуле (1.42).
 Симплекс-таблица Т
2
(q
)
, изображенная на рис. 1.8
, соответствует допустимому базису КЗЛП β(q
)
, получаемому наq
-й итерации. Столбец N
(β(q
)
) содержит номера базисных столбцов (в последовательности вхождения в базис); столбец b
(β(q
)
) — компоненты вектора ограничений относительно текущего базиса β(q
)
; Δ-1
(β(q
)
) — матрица, обратная по отношению к матрице расширенных столбцов текущего базиса β(q
)
; графа а
l
содержит расширенный вектор условий, вводимый в базис на текущей итерации, а следующая графа — координаты а
l
(β(q
)
)этого же столбца в текущем базисе β(q
)
. Симплекс-таблица Т
2
(q
)
, изображенная на рис. 1.8
, соответствует допустимому базису КЗЛП β(q
)
, получаемому наq
-й итерации. Столбец N
(β(q
)
) содержит номера базисных столбцов (в последовательности вхождения в базис); столбец b
(β(q
)
) — компоненты вектора ограничений относительно текущего базиса β(q
)
; Δ-1
(β(q
)
) — матрица, обратная по отношению к матрице расширенных столбцов текущего базиса β(q
)
; графа а
l
содержит расширенный вектор условий, вводимый в базис на текущей итерации, а следующая графа — координаты а
l
(β(q
)
)этого же столбца в текущем базисе β(q
)
.
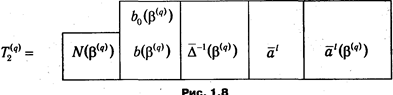
По аналогии с п. 1.4.1 опишем формальную схему алгоритма модифицированного симплекс-метода.
0-этап. Нахождение допустимого базисного плана.
1. Для поиска допустимого базиса может быть применен метод минимизации невязок, рассмотренный в п. 1.4.5. При этом для решения вспомогательной задачи используется процедурамодифицированного симплекс-метода. В результате 0-этапа мы получаем допустимый базисный план x
(β(1)
) и соответствующие ему матрицу Δ-1
(β(1)
)и вектор b
(β(1)
).
2. Заполняем центральную часть таблицы T
1
, содержащую матрицу А
.
3. Содержимое матрицы Δ-1
(β(1)
)и вектора b
(β(1)
), полученных на этапе поиска допустимого базисного плана, переносится в таблицу T
2
(1)
.
4. Полагаем номер текущей итерацииq
равным 1 и переходим к I-этапу.
1-этап. Стандартная итерация алгоритма
— выполняется для очередного базисного плана x
(β(q
)
).
1°. Проверка оптимальности текущего базисного плана
. Содержимое нулевой строки таблицы T
2
(q
)
— δ0
(β(q
)
) переписывается в соответствующую графу таблицы T
1
. По формуле (1.42) рассчитываем и заполняем строку a
0
(β(q
)
). Осуществляем просмотр строки оценок a
0
(β(q
)
). Возможны два варианта:
1΄. a
0
(β(q
)
)≥0 —план, соответствующий текущему базису задачи, оптимален.
Вычислительный процесс закончен. Согласно формулам (1.33) и (1.32) выписываются оптимальный план задачи х
* =x
(β(q
)
) и оптимальное значение целевой функцииf
(х
*)=f
(x
(β(q
)
)).
1". В строке оценок a
0
(β(q
)
)существует по меньшей мере один элемент a
0,j
(β(q
)
)<0, т. е. имеющий отрицательную оценку. Следовательно, план x
(β(q
)
) —неоптимален
. Выбирается номер l
, соответствующий элементу, имеющему минимальную (максимальную по абсолютной величине) отрицательную оценку:

l
-й столбец матрицы A
становится ведущим
и должен быть введен в очередной базис. Переходим к пункту 2° алгоритма.
2°. Определение столбца, выводимого из базиса
. Переписываем ведущий столбец а
l
из таблицы T
1
в текущую таблицу Т
2
(q
)
. По формуле а
l
(β(q
)
) = Δ-1
(β(q
)
)а
l
заполняем соответствующий столбец в таблицеТ
2
(q
)
. Возможны два варианта:
2'. Для всехi
Î 1: m
а
i,l
(β(q
)
)≤0. Делается вывод о неограниченности целевой функции
и завершается вычислительный процесс.
2". Существует по крайней мере один индексi
Î 1: m
, для которого а
i,l
(β(q
)
)>0. Согласно правилу (1.27) определяются место r
и номерNr
(β(q
)
) для столбца, выводимого из базиса. Переходим к пункту 3° алгоритма.
3°. Пересчет относительно нового базиса элементов столбца
b
и матрицы
Δ-1
. Переход к новому базисуβ(q
+1)
, который получается введением в базис β(q
)
столбца а
l
и выводом из него столбца а
r
, осуществляется по формулам, аналогичным формулам (1.28)-(1.31). Они имеют вид:
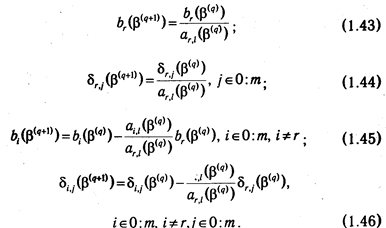
Полагаем номер текущей итерацииq
: =q
+l и переходим к первому пункту алгоритма.
В завершение подчеркнем, что в силу приведенных выше преимуществ именно модифицированный симплекс-метод реально применяется в программном обеспечении, предназначенном для решения канонических задач линейного программирования.
1.5.2. Пример решения ЗЛП модифицированным симплекс-методом.
Приведем решение рассмотренной ранее задачи (1.34)-(1.35), основанное на использовании процедуры модифицированного симплекс-метода. По аналогии с п. 1.4.3оно начинается с выбора очевидного исходного базиса, образуемого столбцами {5,2,3}. Для него уже были вычислены Δ-1
(β(q
)
) и b
(β(q
)
), поэтому заполнение начальных таблиц T
1
и Т
2
(1)
не представляет труда.
На первой итерации мы переписываем нулевую строку

из Т
2
(1)
вT
1
и, умножив ее на матрицу A
, получаем строку оценок

Так какa
0
(β(1)
) содержит отрицательные элементы, то делаем вывод о неоптимальности плана, соответствующего базису β(1)
, и, выбрав наименьшую отрицательную оценку (-88), получаем номер столбца, вводимого в базис, l
=4.
Переписываем столбец
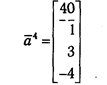
из таблицы T
1
в Т
2
(1)
и пересчитываем его координаты относительно текущего базиса, т. е. умножаем матрицу Δ-1
(β(q
)
), расположенную в таблице Т
2
(1)
слева, на а
4
.
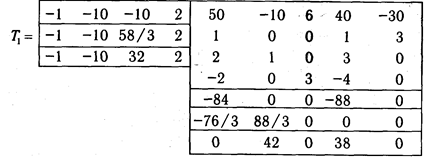
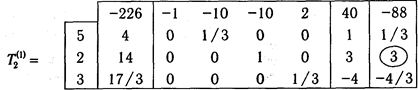
После заполнения таблицы Т
2
(1)
данными по вводимому в новый базис столбцу можно перейти к определению номера выводимого столбца. Эта процедура осуществляется в полной аналогии с обычным симплекс-методом. Рассмотрев отношения элементов bi
(β(1)
) и ai,l
(β(1)
) для {i
Î1:m| ai,l
(β(1)
)>0} и определив минимальное из них, находим, что r
=2. Следовательно, столбец с номером N
2
(β(q
)
) =2 должен быть выведен из базиса. Таким образом, получаем очередной допустимый базис задачи с N
(β(2)
) ={5, 4, 3}. Элементa
2,3
(β(1)
) является ведущим (обведен кружком). Применив формулы (1.43)-(1.46), переходим к симплекс-таблице, соответствующей второй итерации Т
2
(2)
, и полагаем индекс текущей итерацииq
= 2.
Повторяя те же самые действия (их легко проследить по приводимым здесь таблицам Т
2
(2)
и Т
2
(3)
, на третьей итерации мы получим оптимальный план задачи и оптимальное значение целевой функции, которые извлекаются из второго столбца таблицы Т
2
(3)
. Легко заметить, что в процессе решения мы «прошли» по той же самой последовательности допустимых базисных планов, которая встречалась в п. 1.4.3.
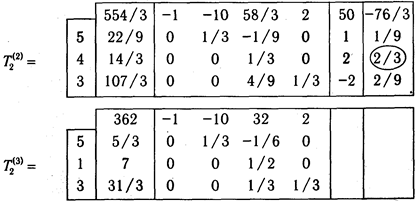
1.6. ТЕОРИЯ ДВОЙСТВЕННОСТИ В ЛИНЕЙНОМ ПРОГРАММИРОВАНИИ
1.6.1. Понятие двойственной задачи ЛП
. Пусть задана КЗЛП (1.7). Если целевая функцияf
(x
) = cx
достигает максимального значения на множествеD
, то обоснованным представляется вопрос о том, каким образом можно построить верхнюю оценку для нее. Очевидно, что если через и
обозначить некоторый m
-мерный вектор, то

Предположим, что и
можно выбрать таким образом, чтобы иА
≥
с
. Тогда при любых х
≥ 0 справедливо неравенство

Стремясь получить наилучшую оценку (1.47), мы приходим к формулировке некоторой новой кстремальной задачи, которая в некотором смысле логически сопряжена с задачей (1.7) называется двойственной
. Оговоримся, что приведенные рассуждения не носят строгого характера и предназначены только для того, чтобы подготовить читателя к приводимому ниже формальному определению двойственной задачи линейного прoграммирования.
-Если задана каноническая задача ЛП

то задача ЛП

называется
двойственной
по отношению к ней. Соответственно, задача
(D, f
) no
отношению к
(D*,f
*)называется
прямой
(или исходной).
1.6.2. Общая схема построения двойственной задачи.
Приведенное выше определение задачи, двойственной по отношению к канонической ЗЛП, может быть распространено на случай общей задачи линейного программирования.
-Если задана общая задача ЛП
f
(x
) = c
1
x
1
+ ... +с
j
х
j
+
с
j
+1
х
j+
1
+
...
+с
n
xn →
max,x
ÎD,
(1.50)
где D определяется системой уравнений и неравенств:
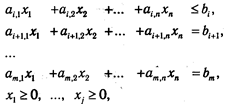
то
двойственной
по отношению к ней называется общая задача
ЛП

где D
*
определяется системой уравнений и неравенств:
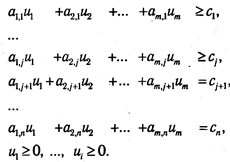
Правила построения задачи, двойственной по отношению к ОЗЛП, наглядно представлены схемой, показанной на рис. 1.9.
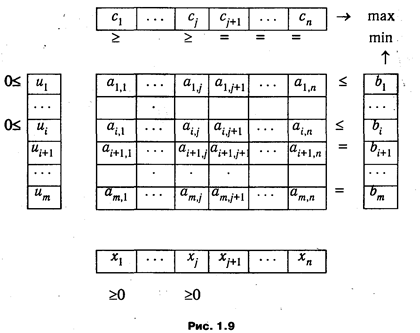
Как следует из приведенной схемы при переходе от прямой задачи ЛП к двойственной:
1. Тип оптимума меняется на противоположный, т. е. максимум на минимум, и наоборот.
2. Вектор коэффициентов целевой функции с
и столбец ограничений b
меняются местами.
3. Матрица ограничений задачи A
транспонируется.
4. Множество индексов переменных, на которые наложено условие неотрицательности в прямой задаче (например, х
j
≥ 0 или uj
≥ 0), определяют номера ограничений, имеющих форму неравенств в двойственной задаче (aj
u
≥ с
j
или ai
x
≤ bj
).
5. Множество номеров ограничений, имеющих форму неравенств в прямой задаче (например, ai
x
≤ bj
или aj
u
≥ с
j
)
, определяют множество индексов переменных, на которые накладывается условие неотрицательности, в двойственной задаче (ui
≥ 0 или xi
≥ 0).
-Из приведенного определения вытекает важное свойство — симметричность отношения двойственности, т. е. задача, двойственная по отношению к двойственной, совпадает с прямой (исходной) задачей
:

Тем самым имеет смысл говорить о паре взаимно двойственных задач.
В матричной форме пара двойственных общих задач линейного программирования может быть кратко записана как:

Рассмотрим процесс построения двойственной задачи на конкретном примере. Пусть задана ОЗЛП (D
,f
):
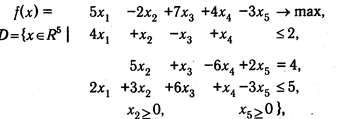
тогда двойственной к ней будет задача (D*
,f*
):
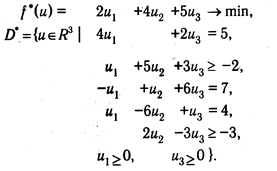
1.6.3. Теоремы двойственности и их применение
. Фундаментальные свойства, которыми обладают двойственные задачи линейного программирования, могут быть сформулированы в виде приводимых ниже утверждений. Их обычно называют теоремами двойственности
.
| Теорема 1.4
. Если х, и— допустимые планы для пары двойственных задач
(D,f
) и (D*,f*
), т
o
f
(x
) ≤ f
(u
). |
Доказательство.
Достаточно доказать теорему для случая, когда задача (D
,f
) является канонической. Рассмотрим пару двойственных задач

Из того, что вектор и
является допустимым планом задачи (D
*, f
*), следует, что иА
≥ с
. Умножив левую и правую части данного неравенства на вектор х
≥ 0 , получим равносильную систему неравенств

Одновременно для вектора х, являющегося допустимым планом задачи (D, f
), справедливо равенствоAx=b
. Тем самым доказано, что и
b ≥
сх
.
-
Замечание.
Теорема 1.4, разумеется, верна и для оптимальных планов взаимно двойственных задач:f(x*) ≤ f*(u*)
,
где х*
и u*—
любые оптимальные планы задач (D, f
) и (D*,f
*). На самом деле, как будет видно из дальнейшего, справедливо равенство f(x*) = f*(u*).
Теорема 1.5.
Если для некоторых допустимых планов
и  взаимно двойственных задач
(D, f
) и
(D
*,f
*)выполняется равенство
f()=f*(
),
то
и являются оптимальными планами для этих задач. взаимно двойственных задач
(D, f
) и
(D
*,f
*)выполняется равенство
f()=f*(
),
то
и являются оптимальными планами для этих задач.
|
Доказательство.
Согласно теореме 1.4, для всех допустимых планов х
задачи (D, f
) справедливо неравенство сх
<
b
. По условию теоремыf()=f(
)
или, что то же самое, с
=
b
. Следовательно, верно утверждение: для любого x ÎDс
>сх
, т. е. х
является оптимальным планом для задачи (D, f
).
Рассуждения, доказывающие оптимальность плана
для задачи (D*
,f
*), проводятся аналогично. -
Теорема 1.6.
Если целевая функция
f
в задаче
(D, f)
не ограничена сверху, то двойственная к
ней задача (D*,
f
*) не имеет допустимых планов.
|
Доказательство.
Если предположить, что у двойственной задачи (D
*,f
*) существует хотя бы один допустимый план и̃
, то, согласно теореме 1.4, для любого допустимого плана х
задачи (D, f
) справедливо неравенство f
(
x
)
≤ f
*(
)<+∞. Последнее означает, что целевая функция f
задачи (D, f
) ограничена сверху. Поскольку это противоречит условию теоремы, предположение о существовании допустимых планов двойственной задачи (D*,f
*) неверно. -
Следующее утверждение, известное как теорема равновесия
, используется при проверке оптимальности планов ЗЛП.
| Теорема 1.7.
Пусть х*
и u* —
оптимальные планы канонической задачи (D, f) и двойственной по отношению к ней задачи
(D*,f*).
Если
j
-я компонента плана х* строго положительна
(xj
*
>0),
то соответствующее
j-e
ограничение двойственной задачи выполняется как равенство: а
1,j
u
1
* +...+а
m,j
um
*
= с
j
; если же
j
-й компонент плана х* имеет нулевое значение (х
j
*
=0), то j-e ограничение двойственной задачи выполняется как неравенство: а
1,j
u
1
* +...+а
m,j
um
*≥
с
j
.
|
Доказательство.
Векторы х*
и и*,
будучи допустимыми планами соответствующих задач, удовлетворяют условиям: Ах* =
b
, х
*
>
0 и и
*
А-с
≥
0
. Найдем скалярное произведение

Согласно замечанию к теореме 1.2, оптимальные значения целевых функций взаимно двойственных задач совпадают, т. е.
u*b
=сх*.
Последнее означает, что (u*
А-с)х
*
=0 . Однако скалярное произведение двух неотрицательных векторов может быть равно нулю только в том случае, когда все попарные произведения их соответствующих координат равны нулю. Следовательно, еслиxj
*
> 0, то u*
а
j
– с
j
= 0, если жеxj
= 0, то возможно u*
а
j
– с
j
≥ 0 , что и утверждается в теореме. -
Практическое значение теорем двойственности состоит в том, что они позволяют заменить процесс решения основной задачи на решение двойственной, которое в определенных случаях может оказаться более простым. Например, задача, область допустимых значений которой описывается двумя уравнениями, связывающими шесть переменных (m
= 2, n
= 6), не может быть решена графическим методом. Однако данный метод может быть применен для решения двойственной к ней задачи, которая имеет только две переменные.
Еще раз вернемся к таблице Т
2
(q
)
(рис. 1.8
), получаемой на финальной итерации процедуры модифицированного симплекс-метода. Более подробно рассмотрим нулевую строку матрицы Δ-1
(β(q
)
), для которой было введено обозначение δ0
(β(q
)
). Поэлементно она может быть записана в следующем виде:

Введем вектор  =(δ0,1
(β(q
)
), δ0,2
(β(q
)
),..., δ0,m
(β(q
)
)). Нетрудно проверить, что строка оценок a
0
(β(q
)
) может быть представлена следующим образом:
=(δ0,1
(β(q
)
), δ0,2
(β(q
)
),..., δ0,m
(β(q
)
)). Нетрудно проверить, что строка оценок a
0
(β(q
)
) может быть представлена следующим образом:

Согласно критерию оптимальности, на последней итерации данная строка неотрицательна, т. е. ũ
А
≥
с
. Следовательно, вектор и является допустимым планом двойственной задачи.
В то же время элемент b
0
(β(q
)
), содержащий текущее значение целевой функции и равный на последней итерацииf(x*)
,
допускает представление

Согласно теореме 1.5 из равенства f
(х*
)=f
*(ũ
) вытекает, что вектор ũ
служит оптимальным планом двойственной задачи:u
= ũ.
Окончательно можно утверждать, что для оптимального базиса

-Таким образом, существенным преимуществом модифицированного симплекс-метода является то, что он позволяет одновременно найти оптимальные планы как, прямой, так и двойственной задачи.
Читателю в качестве самостоятельного упражнения предлагается построить задачу, двойственную к (1.34)-(1.35), решение которой было приведено в п. 1.5.2, и убедиться, что вектор u
= (-10, 32, 2), полученный в таблице Т
2
(3)
, является для нее допустимым и оптимальным планом.
1.6.4. Экономическая интерпретация.
Традиционная экономическая интерпретация двойственной задачи ЛП базируется на модели простейшей задачи производственного планирования
, описанной во введении. Напомним, что в ней каждый (j
-й) элемент вектора х
рассматривается как план выпуска продукции данного вида в натуральных единицах, с
j
— цена единицы продукции j
-го вида, а
j
— вектор, определяющий технологию расходования имеющихся m
ресурсов на производство единицы продукции j
-го вида, b
— вектор ограничений на объемы этих ресурсов.
Предположим, что для некоторых значений A
,
b
и с
найден оптимальный план х
*
, максимизирующий суммарный доход max{cx
}=cx
*. Достаточно естественным представляется вопрос: как будет изменяться оптимальный план х
* при изменении компонент вектора ограничений b
и, в частности, при каких вариациях b
оптимальный план х
* останется неизменным? Данная задача получила название проблемы устойчивости оптимального плана.
Очевидно, что исследование устойчивости х
* имеет и непосредственное практическое значение, так как в реальном производстве объемы доступных ресурсовbi
; могут существенно колебаться после принятия планового решения х
*.
Когда вектор ограничений b
изменяется на Δb
или, как еще говорят, получает приращение Δb
, то возникают соответствующие вариации для оптимального плана х*(
b
+
Δb
)
и значения целевой функции f(х
*(b
+
Δb
)). Допустим, приращение Δb
таково, что оно не приводит к изменению оптимального базиса задачи, т. е. х*(
b
+
Δb
)
≥0. Определим функциюF
(b
), возвращающую оптимальное значение целевой функции задачи (D
(b
), f
) для различных значений вектора ограничений b

Рассмотрим отношение ее приращенияF
(
b
+
Δb
)
-F(b)
к приращению аргумента Δb
. Если для некоторогоi
устремить Δbi
→
0, то мы получим

Учитывая, что в соответствии с теоремой 1.5

и подставив (1.57) в (1.56), приходим к выражению
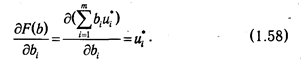
-Из формулы (1.58) вытекает экономическая интерпретация оптимальных переменных двойственной задачи
.
Каждый элемент ui
*
может рассматриваться как предельная (мгновенная) оценка вклада i
-го ресурса в суммарный доход F
при оптимальном решении х
*. Грубо говоря, величина
ui
*
равна приросту дохода, возникающему при увеличении ресурса i на единицу при условии оптимального использования ресурсов.
В различных источниках компоненты оптимального плана двойственной задачи также называются двойственными оценками
или теневыми ценами
, а Л.В.Канторович предлагал такой термин, как объективно обусловленные оценки.
На основе теорем двойственности для пары задач ЛП в общей форме
могут быть сформулированы некоторые важные (с точки зрения экономической интерпретации) следствия.
-Если при использовании оптимального плана прямой задачи
i-e
ограничение выполняется как строгое неравенство, то оптимальное значение соответствующей двойственной переменной равно нулю, т.е. если

В рамках рассматриваемой задачи производственного планирования это означает, что если некоторый ресурс bi
, имеется в избыточном количестве (не используется полностью при реализации оптимального плана), то i
-e ограничение становится несущественным и оценка такого ресурса равна 0.
-Если при использовании оптимального плана двойственной задачи
j-e
ограничение выполняется как строгое неравенство, то оптимальное значение соответствующей переменной прямой задачи должно быть равно нулю, т. е. если a
1,j
u
1
*
+...а
m,j
и
m
– с
j
> 0, то х
j
*
=
0.
Учитывая экономическое содержание двойственных оценок u
1
*,...,um
, выражение а
1,j
u
1
* +…am,j
um
*
может быть интерпретировано как удельные затраты наj
-й технологический процесс. Следовательно, если эти затраты превышают прибыль от реализации единицы j
-го продукта, то производство j
-го продукта является нерентабельным и не должно присутствовать в оптимальном производственном плане (xj
*
=0).
Несмотря на возможные аналогии, которые могут возникнуть у читателей, знакомых с такими фундаментальными понятиями экономической теории, как предельные издержки и предельный доход, двойственные оценки не следует однозначно отождествлять с ценами (хотя такие попытки иногда предпринимались на начальной стадии становления исследования операций как науки). Еще раз подчеркнем, что переменные двойственной задачи по своему смыслу являются оценками потенциальной возможности получения дополнительной прибыли за счет увеличения соответствующего ресурса в условиях оптимального функционирования управляемого экономического объекта.
1.6.5. Анализ параметрической устойчивости решений ЗЛП
. В предыдущем пункте мы затронули некоторые аспекты чувствительности и устойчивости оптимального плана по отношению к изменению вектора ограничений b
. Очевидно, что аналогичные вопросы могут быть поставлены для случая вариации коэффициентов целевой функции с
j
,j
Î1:n
.
С точки зрения экономической интерпретации задача исследования параметрической устойчивости может быть рассмотрена как изучение тех пределов колебания цен на продукцию управляемого предприятия (фирмы), при которых принятый план выпуска продукции продолжает оставаться оптимальным.
Также содержание проблемы устойчивости оптимального плана ЗЛП по отношению к вариациям целевой функции может быть проиллюстрировано с помощью первой геометрической интерпретации. На рис. 1.10
изображено множество допустимых плановD
некоторой задачи ЛП. Как видно из рисунка, целевая функция f
(ее поведение отражает линия уровня, показанная жирным пунктиром) достигает экстремального значения в точке х
*, а изменению ее коэффициентов от с
к с'
или с"
на рисунке соответствует поворот линии уровня относительно х
*. Активным, т. е. обращающимся в равенство, ограничениям в точке х
* соответствуют линии (1) и (2). До тех пор, пока при повороте, вызванном изменением вектора с
, линия уровня целевой функции не выходит за пределы образуемого линиями ограничений конуса, х*
остается оптимальным планом. Как показано на рис. 1.10
, этот план не меняется при переходе от с
к с'
, и, наоборот, при переходе от с
к с"
линия уровня целевой функции f(x)=c"x
пересечет линию (2), что вызовет изменение оптимального базисного плана, которым теперь станет точка  . .
Используя условия оптимальности плана ЗЛП
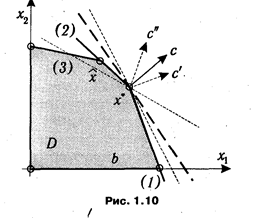

нетрудно получить количественные оценки для пределов колебаний коэффициентов целевой функции, при которых не происходит изменение оптимального плана. Допустим, вариации подвергся некоторый элемент с
r
: с
r
′
= с
r
+εr
. Возможны два случая:
1. Столбец r
не входит в оптимальный базис (r
ÎN
(β(q
)
)). Тогда для неизменности оптимального плана необходимо и достаточно выполнение условия

Отсюда можно получить значение для допустимой вариации

2. Столбец r
входит в оптимальный базис (r
ÎN
(β(q
)
)). В этом случае для сохранения оптимальности текущего плана потребуется выполнение для всех небазисных столбцов (j
ÏN
(β(q
)
))условий

Следовательно, в этом случае допустимая вариация должна удовлетворять условиям

Приведенный пример исследования чувствительности оптимального плана по отношению к изменению параметров задачи является весьма простым. Очевидно, что существуют и более сложные задачи, в которых, например, исследуются совместные вариации параметров разных типов. Они составляют предмет специального раздела исследования операций, получившего название параметрического программирования
. Заинтересованный читатель может получить дополнительную информацию по данному предмету в [1, 6].
1.7. ДВОЙСТВЕННЫЙ СИМПЛЕКС-МЕТОД
1.7.1. Основные идеи двойственного симплекс-метода.
Непосредственное приложение теории двойственности к вычислительным алгоритмам линейного программирования позволило разработать еще один метод решения ЗЛП, получивший название двойственного симплекс-метода
, или метода последовательного уточнения оценок
. Впервые он был предложен Лемке в 1954 г.
В процессе изложения идей, положенных в основу двойственного симплекс-метода, еще раз воспользуемся второй геометрической интерпретацией ЗЛП. Рассмотрим некоторую КЗЛП (1.48). На рис. 1.11
изображен конус К
положительных линейных комбинаций расширенных векторов условий а
j
для случая m
= 2, n
= 6, а на рис. 1.12
— (для большей наглядности) — поперечное сечение данного конуса некоторой плоскостьюL
, проходящей параллельно оси аппликат.
С каждым планом и
задачи, двойственной по отношению к (1.48), можно взаимно однозначно связать гиперплоскость, проходящую через начало координат и перпендикулярную вектору (-1,и
). Допустимые планы двойственной задачи (1.49) должны удовлетворять условиям иА
≥ с
, которые можно переписать в виде (1,и
)А
≥ 0 . Последнее означает, что всякий расширенный вектор условий а
j
лежит «ниже» плоскости, определяемой вектором (-1, и
). Таким образом, любому допустимому плану двойственной задачи в рассматриваемом примере соответствует некоторая плоскость, расположенная выше всех расширенных векторов, а стало быть, и конуса К
. На рис. 1.12
, где изображено поперечное сечение, конусу К
отвечает многогранник, а «гиперплоскостям двойственных планов» — пунктирные линии, являющиеся их следами.
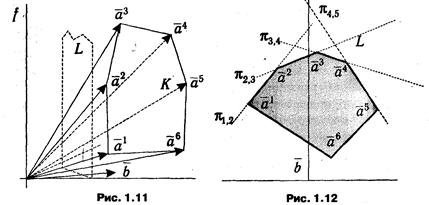
По аналогии с интерпретацией решения прямой задачи процесс решения двойственной задачи может быть представлен как поиск такой гиперплоскости, которая лежит выше конуса К и пересекает прямую, проведенную через конец вектора
b
параллельно оси аппликат, в самой нижней точке.
Из геометрической иллюстрации видно, что плоскости, не соприкасающиеся с конусом К
, заведомо не представляют интереса, так как для любой из них легко указать плоскость, у которой искомая точка пересечения лежит ниже. Таким образом, процесс поиска экстремума сводится к последовательному перебору плоскостей, касающихся «верхних» граней конуса, или, как еще говорят, опорных по отношению к конусу
. Для случая, изображенного на рис. 1.12
, таковыми являются гиперплоскости π1,2
, π2,3
, π3,4
и π4,5
. Как можно заметить, каждая из рассматриваемых гиперплоскостей натянута на некоторый базисный набор расширенных векторов а
j
, что, собственно, и использовано для их обозначения (π1,2
~ {а
1
, а
2
} и т. д.).
-В дальнейшем систему
β={aj
1
, aj
2
,...,ajm
} из т линейно-независимых столбцов матрицы условий прямой задачи А будем называть
сопряженным базисом
, или
двойственно допустимым базисом
, если всякий вектор и
Î Rm
, удовлетворяющий условиям, удовлетворяет также условиям иа
j
≥cj
(j
Î1:n),
т. е. является допустимым планом двойственной задачи
(1.49).
План двойственной задачи и
, соответствующий сопряженному базису β={aj
1
, aj
2
,...,ajm
}, называют опорным планом
. Его «опорность» заключается в том, что в системе ограничений u
а
j
≥ cj
(j
Î1:n
), задающих область определения двойственной задачиD
*, т
неравенств с номерами j
ÎN
(β) обращаются в равенства.
Следует обратить внимание на то, что не всем сопряженным базисам
соответствуют допустимые базисные планы прямой задачи. В частности, вектор b
не может быть разложен с неотрицательными коэффициентами по базисам {а
1
, а
2
}, {а
3
, а
4
} или {а
4
, а
5
}. В связи с этим систему коэффициентов разложения вектора b
по сопряженному базису называют псевдопланом
. В то же время базис {а2
, а3
} является допустимым для прямой задачи, и, более того, из иллюстрации видно, что он, с одной стороны, определяет максимум прямой задачи (наивысшую точку пересечения прямой, проходящей через конец b
, с конусом К
), а с другой — минимум двойственной (низшую точку пересечения этой прямой с лежащей над К
опорной гиперплоскостью):
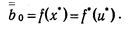
Последний факт является не чем иным, как геометрической иллюстрацией утверждения теоремы 1.5.
Описанные выше свойства пары двойственных задач линейного программирования являются идейной основой двойственного симплекс-метода, который представляет собой итеративный процесс целенаправленного перебора сопряженных (двойственно допустимых) базисов и соответствующих псевдопланов. В этом и заключено его принципиальное отличие от обычного симплекс-метода, в котором последовательно рассматриваются допустимые базисные планы прямой задачи*. Нетрудно догадаться, что при определенной структуре задачи путь, предлагаемый двойственным алгоритмом, может оказаться более коротким.
* В данном пункте используется та же система обозначений, что и в п. 1.4.1.
-Критерий оптимальности псевдоплана х в двойственном симплекс-методе заключается в том,
что х одновременно должен являться допустимым планом прямой задачи, т. е. все его
компоненты должны быть неотрицательны
(х
j
≥ 0).
Обратно, если хотя бы одна из компонент псевдоплана является отрицательной, то процесс улучшения значения целевой функции может быть продолжен. Геометрическая иллюстрация данной ситуации приведена на рис. 1.13
. Здесь на плоскости (для m
= 2) изображена система столбцов ограничений КЗЛП, из которых {а
1
, а
2
} образуют текущий базис. Как видно из рисунка, вектор ограничений имеет отрицательную координату по направлению, задаваемому вектором а
1
. В то же время очевидны и те базисы (например, {а
2
, а
3
}), в которых b
будет иметь все положительные координаты. Однако это не всегда так. Пример на рис. 1.14
иллюстрирует случай отсутствия допустимых планов у прямой задачи: вектор b
имеет отрицательную компоненту в текущем базисе {а
1
, а
2
} по направлению а
2
, а для всех остальных небазисных столбцов (а
3
, а
4
) данная координата является положительной, т. е. b
и столбцы, являющиеся кандидатами на ввод в очередной базис, лежат в разных полуплоскостях, образуемых прямой, проходящей через вектор а
1
,
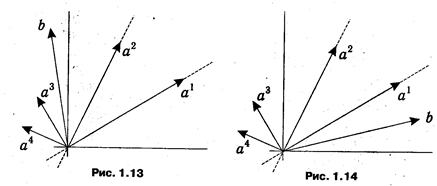
и при любых базисах, отличных от текущего, соответствующая координата вектора b
все равно останется отрицательной.
-Таким образом, в двойственном симплекс-методе признаком отсутствия допустимых планов у
решаемой КЗЛП является неотрицательность каких-либо
r
-х компонент во всех столбцах а
j
,
представленных в текущем базисе
β (ar,j
(β) ≥ 0, j
Î1:n
)если
br
(β) < 0 l.*
* Здесь следует подчеркнуть, что двойственный симплекс-метод непосредственно нацелен на нахождение решения прямой задачи.
С другой стороны, если br
(β)<0 и в строке а
r
(β) существуют отрицательные координаты, то псевдоплан можно улучшить выводя из базиса столбец, находящийся на r
-м
месте, и вводя в него некоторый вектор al
, имеющий отрицательную r
-ую
координату. При наличии в векторе b
(β) нескольких отрицательных компонент номер вектора, выводимого из базиса, обычно определяется строкой, содержащей наименьшую (наибольшую по модулю и отрицательную) компоненту.
Принцип выбора столбца, вводимого в базис, определяется необходимостью обеспечивать то, чтобы очередной базис определял опорную плоскость, ниже которой располагаются все небазисные векторы. Для этого требуется, чтобы оценки всех небазисных векторова
0
,j
(β) ( j
ÎN
(β)), вычисляемые по формулам
а
0
,j
(β) = -cj
+
c
(β)а
j
(β)
(см. (1.26)), оставались положительными. Это, в свою очередь, означает, что номер вводимого столбца l
должен быть определен таким образом. Чтобы

После выбора выводимого и вводимого векторов производится обычный пересчет симплекс-таблицы по формулам, аналогичным формулам (1.28)-(1.31), и процесс итеративно повторяется. В результате через конечное число шагов будет найден оптимальный план КЗЛП или установлен факт пустоты множества допустимых планов.
1.7.2. Алгоритм и табличная реализация двойственного симплекс-метода
. Обобщая сказанное в предыдущем пункте, приведем в сжатом виде алгоритм двойственного симплекс-метода для решения КЗЛП.
0-этап. Нахождение исходного сопряженного (двойственно допустимого базиса).
Результатом 0-этапа являются сопряженный базисβ(1)
и соответствующие ему псевдоплан x
(β(1)
), матрица A
(β(1)
) и вектор b
(β(1)
), которые будут использованы на первой итерации. Полагаем номер текущей итерации q
равным 1 и переходим к I-этапу.
I
-этап. Стандартная итерация алгоритма
— выполняется для очередного сопряженного базиса β(q
)
.
1°. Проверка оптимальности
текущего псевдоплана: осуществляется просмотр значений bi
(β(q
)
), i
Î1:m
. Возможны два варианта:
1΄. Для всех i
Î1:m
, bi
(β(q
)
) ≥ 0. Тогда текущий псевдоплан x
(β(q
)
) одновременно является допустимым планом решаемой задачи, т. е. ее оптимальным
планом. Вычислительный процесс закончен. Элементы оптимального плана х
* определяются по формуле

а достигаемое на нем значение целевой функции равно

1". Существует по меньшей мере один номер строки r
Î1:m
, для которого br
(β(q
)
)<0 . Следовательно, псевдоплан x
(β(q
)
) — неоптимален.
Выбирается строка с номером r
, такая, что

Она становится ведущей и определяет номер столбца N
r
(β(q
)
), который должен быть выведен из базиса. Переходим к пункту 2° алгоритма.
2°. Определение столбца, вводимого в базис.
Рассматривается ведущая строка а
r
(β(q
)
). Возможны два варианта:
2'. Для всех j
Î1:n
а
r,j
(β(q
)
) ≥ 0. Делается вывод об отсутствии допустимых планов у решаемой задачи
(D
= Ø) и завершается вычислительный процесс*.
* Очевидно, что для определения пустоты множества допустимых планов достаточно найти полностью неотрицательную строку а
i
(β(q
)
), соответствующую bi
(β(q
)
) < 0.
2". В строке а
r
(β(q
)
) существует по крайней мере один элемент а
r,j
(β(q
)
)<0. Согласно правилу (1.62) определяются l
— номер столбца, вводимого в очередной базис. Переходим к пункту 3° алгоритма.
3°. Пересчет элементов матрицы А и столбца
b
относительно нового базиса. В соответствии с формулами (1.28)-(1.31) осуществляем расчет элементов матрицы задачи A
и вектора ограничений b
относительно нового базиса β(q
+1)
, который получается в результате вывода из базиса β(q
)
столбца а
r
и ввода в него столбца а
l
. Полагаем номер текущей итерации q
: = q+
1 и переходим к первому пункту алгоритма.
По аналогии со стандартным симплекс-методом вычислительную процедуру двойственного симплекс-метода удобно оформлять в виде таблиц, приведенных на рис. 1.5.
Очевидно, что с формальной стороны их структура остается неизменной. Иногда считается целесообразным добавить к двойственной симплекс-таблице строку, содержащую строку со значениями λj
, которые вычисляются на этапе определения столбца, вводимого в базис.
1.7.3. Особенности применения двойственного симплекс-метода
. Алгоритм двойственного симплекс-метода (как и остальные симплекс-алгоритмы) предполагает знание исходного сопряженного базиса. Очевидно, что в общем случае его нахождение является достаточно непростой задачей, сводящей на нет потенциальные преимущества двойственного алгоритма. Однако в ряде случаев исходный псевдоплан может быть определен достаточно легко.
Рассмотрим задачу минимизации:

при ограничениях
где

Приведем задачу (1.66)-(1.68) к канонической форме, введя фиктивные переменные х
n
+1
, х
n
+2
,...
, х
n+m
:
Задача, двойственная к (1.70)—(1.72), будет иметь вид:

Из (1.74)-(1.75) очевиден допустимый план двойственной задачи

и исходный сопряженный базис, образуемый векторами а
n+
1
,а
n+
2
,…., а
n+m
.
При этом начальный псевдоплан равен

Таким образом, при решении задачи вида (1.66)-(1.68) двойственный симплекс-метод имеет несомненные преимущества по сравнению с прямым.
Другое важное направление использования двойственного симплекс-метода связано с поиском оптимальных планов в тех задачах, условия которых претерпели некоторые изменения после того, как они уже были решены с помощью стандартной симплекс-процедуры. Типичными примерами таких изменений являются:
- изменение компонент вектора ограничений
b
, что, допустим, может быть интерпретировано как
корректировка объемов доступных ресурсов в процессе управления экономическим объектом;
- добавление новых ограничений к системе условий задачи, что достаточно часто случается при совершенствовании используемой экономико-математической модели.
В первом случае, т. е. при изменении вектора b
, достоинства двойственного симплекс-метода очевидны, так как ранее найденный оптимальный базис можно использовать в качестве исходного сопряженного базиса при продолжении решения. Второй случай более подробно будет рассмотрен в гл. 4 при рассмотрении методов решения целочисленных задач.
В заключение отметим, что в настоящем параграфе был рассмотрен вариант двойственного алгоритма, соответствующий стандартному симплекс-методу. Нетрудно догадаться, что существует и вариант, построенный на базе модифицированного симплекса (схемы, связанной с преобразованием обратных матриц), но, поскольку этот вопрос представляет интерес в основном с точки зрения техники организации вычислений, мы на нем останавливаться не будем. При желании с глубоким и детальным описанием данной версии алгоритма можно ознакомиться в [1]. Отметим лишь, что она обладает теми же принципиальными преимуществами, что и модифицированный симплекс-метод.
1.7.4. Пример решения ЗЛП двойственным симплекс-методом
. Рассмотрим на конкретном, примере процесс решения КЗЛП двойственным симплекс-методом. Для этого, опять-таки, вернемся к задаче (1.34)-(1.35), решенной в п. 1.4.3 и п. 1.5.2. Предположим, что произошли изменения в векторе ограничений b
в результате которых
Содержание исходной симплекс-таблицы T
(1)
(за исключением столбца b
(β(1)
)) будет идентично содержанию таблицы, получающейся на последнем шаге алгоритма, рассмотренного в п. 1.4.3. Для вычисления значений b
(β(1)
) в данном случае можно воспользоваться обратной матрицей, полученной на последней итерации в п. 1.5.2:
В результате имеем:

Как видно из таблицы Т
(1)
, в столбце b
(β(1)
) содержатся отрицательные элементы b
1
(β(1)
) = - 1/3<0), то есть базис β(1)
={ 5
,
1
,
3
} не является оптимальным, но в то же время легко убедиться, что он обладает свойствами сопряженного базиса. Отрицательный элемент в b
(β(1)
) является единственным, поэтому номер столбца, выводимого из базиса, определяется однозначно — r
=1 и N
1
(β(1)
)=5. Далее рассматриваем строку a
1
(β(1)
) = (0, -1/6, 0, -1/6, 1). В ней имеются отрицательные элементы. Вычисляем λ2
=42:(-(-1/6))=252, λ4
=38:(-(-1/6))=228. λ2
> λ4
, следовательно, номер столбца, вводимого в базис — l
=4. Осуществляем преобразование иполучаем симплекс-таблицу T
(2)
.
5
,
1
,
3
} не является оптимальным, но в то же время легко убедиться, что он обладает свойствами сопряженного базиса. Отрицательный элемент в b
(β(1)
) является единственным, поэтому номер столбца, выводимого из базиса, определяется однозначно — r
=1 и N
1
(β(1)
)=5. Далее рассматриваем строку a
1
(β(1)
) = (0, -1/6, 0, -1/6, 1). В ней имеются отрицательные элементы. Вычисляем λ2
=42:(-(-1/6))=252, λ4
=38:(-(-1/6))=228. λ2
> λ4
, следовательно, номер столбца, вводимого в базис — l
=4. Осуществляем преобразование иполучаем симплекс-таблицу T
(2)
.
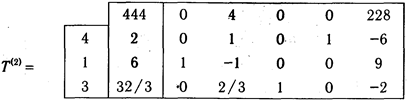
Поскольку b
(β(2)
)>0, то достигнутый базис N
(β(2)
)={4,1,3} является оптимальным. Из Т
(2)
можно выписать оптимальный план х
* =(6, 0, 32/3, 2, 0) и соответствующее ему значение целевой функцииf
(x
*)= 444.
КЛЮЧЕВЫЕ ПОНЯТИЯ
- Общая задача линейного программирования (ОЗЛП).
- Каноническая задача линейного программирования(КЗЛП).
- Допустимый план.
- Оптимальный план.
- Первая геометрическая интерпретация ЗЛП.
- Базисное решение ЗЛП.
- Вторая геометрическая интерпретация ЗЛП.
- Вырожденный и невырожденный план ЗЛП.
- Симплекс-метод — метод последовательного улучшенияплана.
- Критерий оптимальности допустимого базисного плана.
- Метод минимизации невязок.
- Модифицированный симплекс-метод — вычислительнаясхема, связанная с преобразованием обратных матриц.
- Двойственная задача линейного программирования.
- Симметричность отношения двойственности.
- Теоремы двойственности.
- Экономическая интерпретациядвойственных оценок.
- Параметрическая устойчивость решения ЗЛП.
- Двойственный симплекс-метод — метод последовательного уточнения оценок.
- Сопряженный (двойственно допустимый) базис.
- Опорный план и псевдоплан.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.1. Сформулируйте задачу линейного программирования.
1.2. Дайте определение для следующих понятий: план, допустимый план, оптимальный план,
решение задачи.
1.3. Чем отличается общая задача линейного программирования от канонической?
1.4. Всегда ли общую задачу линейного программирования можно привести к каноническому виду?
1.5. Дайте определения для следующих понятий: аффинное множество, гиперплоскость, базис.
1.6. Чем отличается выпуклый многогранник от многогранного выпуклого множества?
1.7. В чем отличие понятий «линейная оболочка» и «выпуклая оболочка»?
1.8. Любой ли конус является выпуклым множеством?
1.9. Какая точка выпуклого множества называется угловой?
1.10. В чем заключается первая геометрическая интерпретация задачи линейного программирования?
1.11. В чем заключается вторая геометрическая интерпретация задачи линейного программирования?
В чем ее отличие от первой?
1.12. Какой план называется базисным?
1.13. Как связаны базисные планы и угловые точки области определения задачи линейного
программирования?
1.14. Какой план задачи линейного программирования называется вырожденным?
1.15. Как с точки зрения второй геометрической интерпретации можно представить процесс поиска
оптимального плана в задаче линейного программирования?
1.16. Сформулируйте критерий оптимальности допустимого базисного плана, применяемый в
симплекс-методе.
1.17. Сформулируйте основные этапы стандартной итерации симплекс-метода.
1.18. Для чего применяется преобразование Жордана—Гаусса?
1.19. Какой элемент симплекс-таблицы называется ведущим?
1.20. При каких условиях делается вывод о неограниченности целевой функции в решаемой задаче?
Какая геометрическая интерпретация соответствует данному случаю?
1.21. Можно ли заранее точно определить количество итераций, которое потребуется для решения
задачи симплекс-методом? Можно ли найти верхнюю границу для данной величины?
1.22. Какая задача называется вырожденной? По каким признакам можно узнать, что текущий план
является вырожденным?
1.23. Какие проблемы возникают при решении вырожденных задач?
1.24. Какую экономическую интерпретацию имеет ситуация вырожденности?
1.25. В чем основная идея метода возмущений?
1.26. Для чего предназначен метод минимизации невязок?
1.27. Сформулируйте основные отличия модифицированного симплекс-метода по отношению к
стандартному.
1.28. Перечислите преимущества модифицированного симплекс-метода.
1.29. Будет ли отличаться количество итераций при решении одной и той же задачи при решении ее
стандартным и модифицированным симплекс-методом?
1.30. Дайте определение двойственной задачи.
1.31. Какими основными свойствами обладает пара двойственных задач?
1.32. В чем заключается экономическая интерпретация переменных двойственной задачи?
1.33. Какой смысл вкладывается в понятие «параметрическая устойчивость»?
1.34. Сформулируйте условия для допустимых изменений целевой функции задачи, при которых ее
оптимальный план остается неизменным.
1.35. Перечислите основные идеи, на которых базируется алгоритм двойственного симплекс-метода.
1.36. Дайте определение сопряженного базиса.
1.37. Что такое псевдоплан?
1.38. Сформулируйте критерий оптимальности, используемый в алгоритме двойственного симплекс-
метода.
1.39. По каким признакам можно определить, что множество допустимых планов задачи, решаемой
двойственным симплекс-методом, пусто?
1.40.В каких ситуациях могут быть реализованы преимущества двойственного симплекс-метода?
ГЛАВА 2. НЕЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
2.1. МЕТОДЫ РЕШЕНИЯ ЗАДАЧ
НЕЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ
2.1.1. Постановка задачи.
Как уже упоминалось во введении, предположение о возможности описать зависимости между управляемыми переменными с помощью линейных функций далеко не всегда адекватно природе моделируемого объекта. Например, в рассмотренных в главе 1 моделях цена товара считается независимой от количества произведенного продукта, однако в повседневной жизни мы постоянно сталкиваемся с тем, что она может зависеть от объема партии товара. Аналогичные замечания могут быть сделаны и по поводу технологических ограничений: расход определенных видов сырья и ресурсов происходит не линейно, а скачкообразно (в зависимости от объема производства). Попытки учесть эти факторы приводят к формулировке более общих и сложных оптимизационных задач. Изучение методов их решения составляет предмет научной области, получившей названия нелинейного программирования
.
Общая задача нелинейного программирования (ОЗНП) определяется как задача нахождения максимума (или минимума) целевой функцииf
(x
1
,х
2
,
...,xn
) на множествеD
, определяемом системой ограничений

где хотя бы одна
из функций f
илиgi
является нелинейной.
По аналогии с линейным программированием ЗНП однозначно определяется парой (D
, f
) и кратко может быть записана в следующем виде

Также очевидно, что вопрос о типе оптимизации не является принципиальным. Поэтому мы, для определенности, в дальнейшем по умолчанию будем рассматривать задачи максимизации.
Как и в ЗЛП, вектор х
* = (x
1
*
,x
2
*
,...,xn
*
) Î D называется допустимым планом
, а если для любого x Î D выполняется неравенствоf
(x
*) ≥ f
(x
), то х*
называют оптимальным планом.
В этом случае х*
является точкой глобального максимума.
С точки зрения экономической интерпретацииf(x)
может рассматриваться как доход, который получает фирма (предприятие) при плане выпуска х
, а gi
(х
) ≤ 0 как технологические ограничения на возможности выпуска продукции. В данном случае они являются обобщением ресурсных ограничений в ЗЛП (а
i
х
–
bi
≤ 0).
Задача (2.2) является весьма общей, т. к. допускает запись логических условий, например:

или запись условий дискретности множеств:

Набор ограничений, определяющих множество D
, при необходимости всегда можно свести либо к системе, состоящей из одних неравенств:
либо, добавив фиктивные переменные у
, к системе уравнений:

Перечислим свойства ЗНП, которые существенно усложняют процесс их решения по сравнению с задачами линейного программирования:
1. Множество допустимых плановD
может иметь очень сложную структуру (например, быть невыпуклым или несвязным).
2. Глобальный максимум (минимум) может достигаться как внутри множества D
, так и на его границах (где он, вообще говоря, будет не совпадать ни с одним из локальных экстремумов).
3. Целевая функция f
может быть недифференцируемой, что затрудняет применение классических методов математического анализа.
В силу названных факторов задачи нелинейного программирования настолько разнообразны, что для них не существует общего метода решения.
2.1.2. Решение задач условной оптимизации методом Лагранжа.
Одним из наиболее общих подходов к решению задачи поиска экстремума (локального максимума или минимума) функции при наличии связующих ограничений на ее переменные (или, как еще говорят, задачи условной оптимизации
) является метод Лагранжа
. Многим читателям он должен быть известен из курса дифференциального исчисления. Идея данного метода состоит в сведении задачи поиска условного экcтремума целевой функции

на множестве допустимых значения D
, описываемом системой уравнений
к задаче безусловной оптимизации функции

гдеu
ÎRm
— вектор дополнительных переменных, называемых множителями Лагранжа.
Функцию Ф(х,и
), где x
ÎRn
, u
ÎRn
, называют функцией Лагранжа
. В случае дифференцируемости функций f
иgi
справедлива теорема, определяющая необходимое условие существования точки условного экстремума в задаче (2.3)-(2.4). Поскольку она непосредственно относится к предмету математического анализа, приведем ее без доказательства.
Теорема 2.1
. Если х
*
является точкой условного экстремума функции (2.3) при ограничениях
(2.4) и ранг матрицы первых частных производных функций
равен т, то существуют такие и
1
*
, и
2
*
,...,и
m
*
,
не равные одновременно нулю, при которых

Из теоремы (2.1) вытекает метод поиска условного экстремума, получивший название метода множителей Лагранжа, или просто метода Лагранжа
. Он состоит из следующих этапов.
1. Составление функции Лагранжа Ф(х,и
).
2. Нахождение частных производных

3. Решение системы уравнений
относительно переменныхx
и u
.
4. Исследование точек, удовлетворяющих системе (2.7), на максимум (минимум) с помощью достаточного признака экстремума.
Присутствие последнего (четвертого) этапа объясняется тем, что теорема (2.1) дает необходимое, но не достаточное условие экстремума. Положение дел с достаточными признаками условного экстремума обстоит гораздо сложнее. Вообще говоря, они существуют, но справедливы для гораздо более частных ситуаций (при весьма жестких предпосылках относительно функций f
иgi
) и, как правило, трудноприменимы на практике.
Еще раз подчеркнем, что основное практическое значение метода Лагранжа заключается в том, что он позволяет перейти от условной оптимизации к безусловной
и, соответственно, расширить арсенал доступных средств решения проблемы. Однако нетрудно заметить, что задача решения системы уравнений (2.7), к которой сводится данный метод, в общем случае не проще исходной проблемы поиска экстремума (2.3)-(2.4). Методы, подразумевающие такое решение, называются непрямыми.
Они могут быть применены для весьма узкого класса задач, для которых удается получить линейную или сводящуюся к линейной систему уравнений (2.7). Их применение объясняется необходимостью получить решение экстремальной задачи в аналитической форме (допустим, для тех или иных теоретических выкладок). При решении конкретных практических задач обычно используются прямые
методы, основанные на итеративных процессах вычисления и сравнения значений оптимизируемых функций.
2.1.3. Градиентные методы решения задач безусловной оптимизации
. Ведущее место среди прямых методов решения экстремальных задач занимает градиентный метод
(точнее, семейство градиентных методов) поиска стационарных точек дифференцируемой функции. Напомним, что стационарной
называется точка, в которой f
(x
)=0 и которая в соответствии с необходимым условием оптимальности является «подозрительной» на наличие локального экстремума. Таким образом, применяя градиентный метод, находят множество точек локальных максимумов (или минимумов), среди которых определяется максимум (или минимум) глобальный. f
(x
)=0 и которая в соответствии с необходимым условием оптимальности является «подозрительной» на наличие локального экстремума. Таким образом, применяя градиентный метод, находят множество точек локальных максимумов (или минимумов), среди которых определяется максимум (или минимум) глобальный.
Идея данного метода основана на том, что градиент функции указывает направление ее наиболее быстрого возрастания
в окрестности той точки, в которой он вычислен. Поэтому, если из некоторой текущей точки х
(1)
перемещаться в направлении вектора f
(x
(1)
), то функция f
будет возрастать, по крайней мере, в некоторой окрестности х
(1)
. Следовательно, для точки х
(2)
= х
(1)
+λf
(x
(1)
), (λ>0), лежащей в такой окрестности, справедливо неравенствоf
(x
(1)
)≤ f
(x
(2)
). Продолжая этот процесс, мы постепенно будем приближаться к точке некоторого локального максимума (см. рис. 2.1
).
Однако как только определяется направление движения, сразу же встает вопрос о том, как далеко следует двигаться в этом направлении или, другими словами, возникает проблема выбора шага λ в рекуррентной формулe

задающей последовательность точек, стремящихся к точке максимума.
В зависимости от способа ее решения различают различные варианты градиентного метода. Остановимся на наиболее известных из них.
Метод наискорейшего спуска
Название метода можно было бы понимать буквально, если бы речь шла о минимизации целевой функции. Тем не менее по традиции такое название используется и при решении задачи на максимум.
Пустьf(x)=f(x
1
,x
1
,...xn
)
—дифференцируемая функция, заданная на Rn
, а х
(q
)
=(x
1
(q
)
,x
2
(q
)
,...,x
n
(q
)
) — некоторая текущая точка. Оговоримся, что каких-либо общих рекомендаций, касающихся выбора исходной точки (или, как еще говорят, начального приближения) х
(0)
, не существует, однако по возможности она должна находиться близко от искомого оптимального плана х
*. Как уже говорилось выше, если х
(q
)
— нестационарная точка (т. е. |f
(x
(q
)
)|>0), то при движении в направлении f
(x
(q
)
) функция f
(х
) на некотором промежутке обязательно будет возрастать. Отсюда возникает естественная идея такого выбора шага, чтобы движение в указанном направлении продолжалось до тех пор, пока возрастание не прекратится. Для этого выразим зависимость значенияf(x)
от шагового множителя λ > 0. полагая х = х(q
)
+ λf
(x
(q
)
)

или, в координатной форме,

Чтобы добиться наибольшего из возможных значений f
при движении по направлениюf
(x
(q
)
), нужно выбрать такое значение  , которое максимизирует функцию φ(λ) (φ()= max(φ(λ)). Для вычисления , используется необходимое условие экстремума d
φ(λ)/d
λ =0. Заметим, что если для любого λ>0 d
φ()/d
λ> 0, то функция f
(х)
не ограничена сверху (т. е. не имеет максимума). В противном случае, на основе (2.10) получаем , которое максимизирует функцию φ(λ) (φ()= max(φ(λ)). Для вычисления , используется необходимое условие экстремума d
φ(λ)/d
λ =0. Заметим, что если для любого λ>0 d
φ()/d
λ> 0, то функция f
(х)
не ограничена сверху (т. е. не имеет максимума). В противном случае, на основе (2.10) получаем

что, в свою очередь, дает

Если считать, что следующая точка х
(
q
+
1
)
соответствует оптимальному значению λ=, то в ней должно выполняться условиеd
φ()/d
λ =0, и следует находить из условияf
(x
(q
+1)
)f
(x
(q
)
)=0 или

Условие (2.13) означает равенство нулю скалярного произведения градиентов функции f
точках x
(q
+1)
и x
(q
)
. Геометрически оно может быть интерпретировано как перпендикулярность векторов градиентов функции f
в указанных точках, что и показано на рис. 2.2
. Продолжая геометрическую интерпретацию метода наискорейшего спуска, отметим, что в точкеx
(q
+1)
векторf
(x
(q
+1)
), будучи градиентом, перпендикулярен линии уровня, проходящей через данную точку. Стало быть, векторf
(x
(q
)
) является касательным к этой линии. Итак, движение в направлении градиентаf
(x
(q
)
) следует продолжать до тех пор, пока он пересекает линии уровня оптимизируемой функции.
После того как точка x
(q
+1)
найдена, она становится текущей для очередной итерации. На практике признаком достижения стационарной точки служит достаточно малое изменение координат точек, рассматриваемых на последовательных итерациях. Одновременно с этим координаты вектора Δf
(x
(q
)
) должны быть близки к нулю.
Метод дробления шага
Для нахождения шага λ в методе наискорейшего спуска требуется решить уравнение (2.13), которое может оказаться достаточно сложным. Поэтому часто ограничиваются «подбором» такого значения λ, что φ(λ) > φ(0). Для этого задаются некоторым начальным значением λ1
, (например,λ1
=l) и проверяют условие φ(λ1
) >φ(0). Если оно не выполняется, то полагают
λ2
= 1/2 λ1
и т. д. до тех пор, пока не удается найти подходящий шаг, с которым переходят к следующей точке x
(q
+1)
. Критерий завершения алгоритма, очевидно, будет таким же, как и в методе наискорейшего спуска.
2.1.4. Оптимизационные задачи для выпуклых функций.
Общим недостатком рассмотренных выше методов безусловной оптимизации было, с одной стороны, то, что они позволяют отыскивать только точки, подозрительные на локальный экстремум, а с другой — то, что найденные решения могут существенно зависеть от начального приближения. Поиск глобального оптимума подразумевает перебор найденных точек, который,
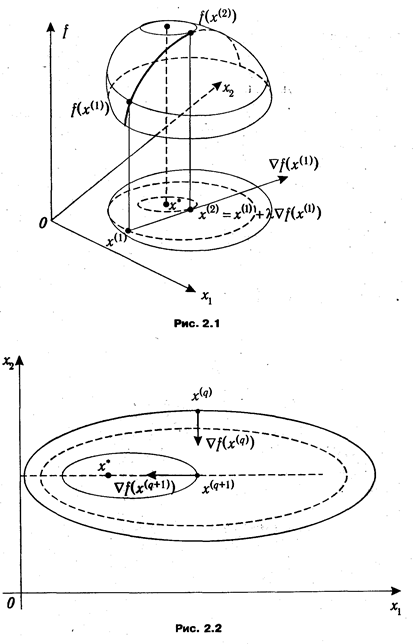
в случае градиентных методов, может быть осуществлен за счет подбора соответствующих начальных приближений х
(0)
.
Однако существует один класс функций, для которых градиентные методы приводят к нахождению глобального оптимума. Это выпуклые
функции.
-Функция
f(x)
= f
(x
1
, x
2
, …, xn
)называется
выпуклой
в области
D,
если для любых двух точек
х
(1)
,
х
(2)
ÎD
и любого
λ Î [0,1] выполняется неравенство

если же

то функция называется
вогнутой.
Геометрический смысл понятий выпуклости и вогнутости для случая функции одной переменной представлен на рис. 2.3.
Из него, в частности, видно, что график выпуклой функции лежит ниже
отрезка, соединяющего точки (х
(1)
, f
(x
(1)
)) и (х
(2)
, f
(x
(2)
)), а график вогнутой — выше
.
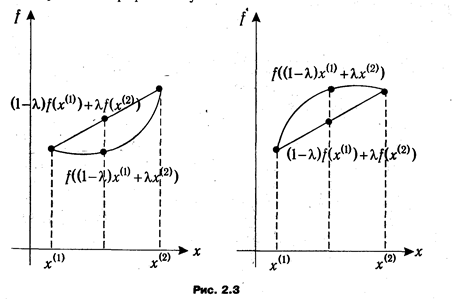
Можно доказать, что достаточным условием выпуклости
функцииf
(x
1
, x
2
, …, xn
) является положительная определенность
матрицы
называемой также матрицей Гессе
, во всех точках х
Î D
. Соответственно, достаточным условием вогнутости
является отрицательная определенность
матрицы Гессе. В частности, для функций одной переменной достаточным условием выпуклости (вогнутости) является выполнение неравенства fn
(x
)≥0 (fn
(x
)≤0).
Как следует из геометрической интерпретации, для выпуклой функции локальный экстремум, если он существует, совпадает с глобальным. Справедлива теорема.
| Теорема 2.2.
Если
f(x)
выпуклая (вогнутая) на
Rn
функция и
f
(x
*)=
0, то
х* — точка глобального минимума (максимума).
|
Доказательство.
Доказательство достаточно провести для случая вогнутой функции, т. к. для противоположного случая оно будет абсолютно аналогичным с точностью до знака.
Пусть х
— произвольная точка, отличная от точки х
*. Тогда, для любого λ Î [0,1], в силу вогнутости функцииf(x)
будет выполняться

из чего следует

Если ввести вектор l
= х - х
* и обозначить Δх
= λ(x
– х
*
) = λl
, то длина вектора Δх
будет равна ||Δx
||=λ||l
||. Следовательно,

Устремив λ → 0 и учитывая, что вектор l
сонаправлен с Δх
, получим
По условию теоремы f
(x
*)=0. Это означает, что для любого вектора l
(а, стало быть, для любой точки х
) согласно формуле, выражающей производную по направлению через градиент,
Следовательно, для любой точки х
, не равной х
*, справедливо неравенствоf(x)-f(x)≤
0 <=> f(x)≤ f(x
*)
, т.е. х
* — точка глобального максимума. -
Поскольку выпуклые функции обладают столь «полезными» оптимизационными качествами, они занимают исключительно важное место в теории исследования операций. Соответствующий раздел получил название выпуклого программирования
, а общая задача выпуклого программирования формулируется как проблема поиска максимума вогнутой (минимума выпуклой) функции на выпуклом множестве.
2.1.5. Метод допустимых направлений
. Данный метод также называется методом возможных направлений или же по имени автора—методом Зойтендейка, см. [16]. Его основную идею будет удобно продемонстрировать на примере ЗНП с ограничениями в форме неравенств:

В указанном методе так же, как и в градиентных методах, находится последовательность точек х
(0)
х
(1)
,..., х
(q
)
..., таких, что f
(х
(q
+1)
) ≥ f
(x
(q
)
) *. При этом переход от точки x
(q
)
) к точке х
(q
+1)
)происходит по некоторому выбранному направлению s
(q
)
с шаговым множителем λq
:

* Так как в данных методах при переходе к очередной рассматриваемой точке происходит улучшение значения целевой функции (в частности, для задачи минимизации — уменьшение), их также называют релаксационными методами.
По отношению к векторам, задающим направления перемещения, вводятся два фундаментальных понятия.
-Направление
s
называется
допустимым
(возможным) в точке
x
(q
)
ÎD
,если существует такое
λ > 0,что
x
(q
+1)
= x
(q
)
+ λs
Î D.
-Направление s называется
прогрессивным
в точке
x
(q
)
Î D
,если существует такое
λ >0, что
f
(x
(q
)
+ λs
)> > f
(x
(q
)
) для задачи максимизации и
f
(x
(q
)
+ λs
) <f
(x
(q
)
) для задачи минимизации.
На основе данных определений достаточно просто сформулировать критерий проверки оптимальности точки (так называемый критерий оптимальности в терминах допустимых и прогрессивных направлений):
-точка х* является оптимальным планом задачи
(2.16), если в ней ни одно допустимое
направление не является прогрессивным.
В алгоритме метода допустимых направлений правила выбора точких
(q
+1)
, к которой происходит очередной переход, различаются в зависимости от того, где находится текущая точка х
(q
)
. Принципиально возможны две ситуации.
1°
. Точка
х
(q
)
лежит внутри области
D
, т. е. для всехi
Î 1: m
gi
(х
(q
)
) < 0 (см. рис. 2.4
). Очевидно, что для внутренней точки любое направление будет допустимым (при выборе достаточно малого шага), поэтому естественным представляется движение в сторону «гарантированного» возрастания значения функции, а именно в направлении градиента. Значит, для внутренней точки х
(q
)
целесообразно выбратьs
(q
)
=f
(х
(q
)
).
Шаговый множитель λq
выбирается так, чтобы, с одной стороны, новая точках
(q
+1)
принадлежала D
, а с другой — значение целевой функции в ней f
(х
(q
+1)
) было как можно большим.
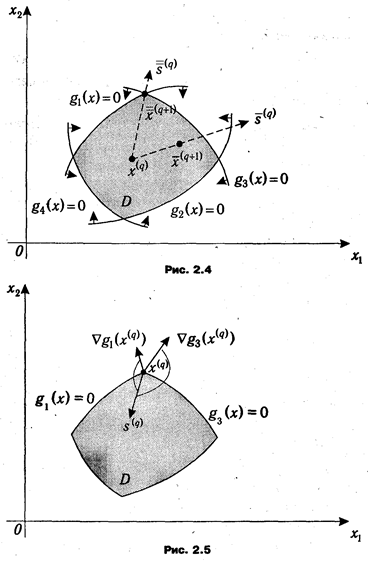
С этой целью сначала найдем промежуток [0, ] из условия ] из условия для чего необходимо решить систему неравенств: для чего необходимо решить систему неравенств:

Зная промежуток [0, ], определяем значение шагового множителя λq
из условия максимизации значения функции в направленииs(q)
:

Вновь найденная точка x
(q
+1)
может находиться или внутри областиD
, или на ее границе. В первом случае (на рис. 2.4
ему соответствует точка  (q
+1)
переходим к началу данного пункта и повторяем вышеописанные действия, а во втором (точка
(q
+1)
на рис. 2.4
) — действуем по рассматриваемой далее схеме.
(q
+1)
переходим к началу данного пункта и повторяем вышеописанные действия, а во втором (точка
(q
+1)
на рис. 2.4
) — действуем по рассматриваемой далее схеме.
2°. Точка
x
(q
)
находится на границе области
(см. рис. 2.5
). Это означает, что одно или несколько неравенств из системы ограничений задачи (2.16) выполняются как строгие равенства:gi
(x
(q
)
) = 0. Например, на рис. 2.5
и g
1
(x
(q
)
) = 0 иg
3
(x
(q
)
) = 0.
Ограничение, которое в текущей точке выполняется как равенство, называют активным.
Множество номеров активных ограничений в точке x
(q
)
будем обозначать как I
(x
(q
)
). В примере, изображенном на рис. 2.5
, I
(x
(q
)
) = {1, 3}. Также из рисунка видно, что все допустимые направления, исходящие из точки x
(q
)
, должны образовывать тупые углы с векторами градиентов функций, задающих активные ограничения в данной точке. Последнее условие может быть выражено через задание ограничений на значения скалярных произведений вектора направленияs
на градиенты функции ограничений:

где I
л
— множество номеров индексов линейных ограничений, I
н
— множество номеров индексов нелинейных ограничений. Соответственно, I
(x
(q
)
)◠I
л
—номера линейных активных ограничений, а I
(x
(q
)
)◠I
н
— номера нелинейных активных ограничений. Отличие условий (2.20) от условий (2.21) заключается в том, что в случае линейного ограничения направление, образующее прямой угол с градиентом ограничивающей функции (т. е. их скалярное произведение равно нулю), будет заведомо допустимым, а в случае нелинейного ограничения — возможно, нет.
Все возможные направления в точке x
(q
)
образуют так называемый конус допустимых направлений
, и из них для следующего перехода, очевидно, нужно выбрать прогрессивное. Если такового не существует, то согласно сформулированному выше критерию точка x
(q
)
является оптимальной! Для ускорения максимизации функции желательно, чтобы угол между искомым допустимым прогрессивным направлениемs
(q
)
и градиентом целевой функции ∇f
(x
(q
)
) был как можно меньше или, что то же самое, как можно большей была бы проекция s
на∇f
(x
(q
)
) (при условиях нормировки вектораs
(q
)
). Иными словами, желательно, чтобы неравенствоs
(q
)
∇f
(x
(q
)
)+σ≥0 выполнялось при минимально возможном σ∈R
.
Тогда задачу отыскания наилучшего допустимого прогрессивного направленияs
(q
)
можно свести к задаче минимизации параметра σ:

при условиях
гдеs
1
2
+s
2
2
+...+sn
2
, ≤ l —условие нормировки, обеспечивающее ограниченность решения;
τ — некоторое достаточно малое число, характеризующее «строгость» выполнения неравенств.
В отличие от всех остальных, последнее условие в системе (2.23) является нелинейным, что существенно усложняет процесс решения задачи (2.22)-(2.23). Поэтому на практике дляопределения направленияs
(q
)
(возможно, не лучшего) переходят от данной задачи к задаче линейного программирования путем замены указанных выше условий нормировки на ограничения вида –l ≤ sj
,
≤1:
После того как прогрессивное направлениеs
(q
)
найдено, шаговый множитель определяется по методу, описанному в п. 1°.
В заключение отметим, что при практических расчетах алгоритм завершается при достижении такой точки х
*, в которой |∇f
(x
*)|<ε, где ε —достаточно малое число.
Представляется полезным обратить внимание читателя и на то, что применяемый для решения задач линейного программирования симплекс-метод может быть рассмотрен как частный случай метода допустимых направлений. В частности, этап выбора столбца, вводимого в очередной базис, соответствует определению допустимого прогрессивного направления. Более подробно о такой концепции симплекс-метода можно прочесть в [1].
2.1.6. Пример решения ЗНП методом допустимых направлений
. Рассмотрим процесс применения метода допустимых направлений на конкретном примере. Пусть дана ЗНП:
Итерация 1
. В качестве начального приближения возьмем точку х
(1)
= (0,0). Нетрудно заметить, что она удовлетворяетсистеме неравенств (2.27), т. е. х
(1)
∈D
. Для х
(1)
все неравенства выполняются как строгие, т. е. множество индексов активных ограничений I
(х
(1)
)=∅. Следовательно, в х
(1)
любое направление является допустимым, и нам остается определить, с каким шагом λ1
можно двигаться вдоль градиента целевой функции s
(1)
=∇f
(x
(1)
)=(1, 1). Система неравенств типа (2.18), из решения которых определяется интервал допустимых значений для λ, для данной задачи примет вид:
Тогда

достигается при λ1
= 3 . Отсюда получаем следующую точку

Итерация 2.
Путем подстановки координат точки x
(2)
в (2.27) определим множество активных ограничений в точке x
(2)
: I
(x
(2)
)={2}. Соответственно, задача (2.24) - (2.25), которую требуется решить для определения допустимого прогрессивного направленияs
(2)
с учетом того, что ∇f
(x
(2)
)=(1, 1) и ∇g
2
(x
(2)
)= (0, 1) примет вид:
В данном случае оптимальный план ЗЛП находится довольно просто и равен (σ,s
1
,s
2
)* =(-1,1, 0). Отбросив дополнительную переменную σ, получаем векторs
(2)
= (1,0), т. е. очередная точка будет определяться как

Действуя по аналогии с предыдущей итерацией, для определения промежутка допустимых значений шагового множителя λ составляем систему неравенств (2.18):

Окончательно имеем λ∈ [0; 1].
Тогда

достигается при λ2
=1. Отсюда получаем следующую точку x
(3)
= (3,4).
Итерация 3.
В точке x
(3)
множество активных ограничений будет иметь вид I
(x
(3)
)={1,2}. Найдем значения градиентов: ∇f
(x
(3)
) = (1, 1), ∇g
1
(x
(3)
) = (2x
1
(3)
, 2x
2
(3)
) =(8, 6) и ∇g
2
(x
(2)
) = (0,1).
Задача определения допустимого прогрессивного направления (2.24)-(2.25) будет иметь вид:
Значение τ из практических соображении следует брать достаточно малым, например τ =0,001. Опуская решение данной задачи, приведем интересующие нас компоненты ее оптимального плана:s
(3)
= (0,0). Итак, не существует прогрессивного направления, исходящего из точки х
(3)
Таким образом, оптимальный план рассматриваемой задачи (2.26)-(2.27) х
* = (4,3), а максимальное значение целевой функции f
* = х
1
(3)
+ х
2
(3)
=7.
Графическая иллюстрация проведенного процесса решения представлена графически на рис. 2.6.
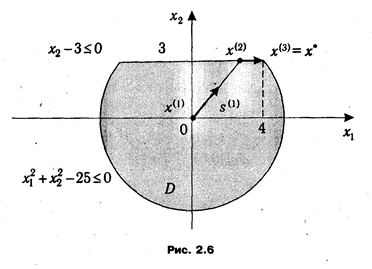
2.2. ДВОЙСТВЕННОСТЬ В НЕЛИНЕЙНОМ ПРОГРАММИРОВАНИИ
2.2.1. Понятие седловой точки.
В настоящем параграфе мы кратко остановимся на некоторых фундаментальных моментах теории нелинейного программирования. Отправной точкой для них является распространение метода Лагранжа для решения ЗНП с ограничениями в форме неравенств:

где X
— некоторая область в пространствеRn
.
По аналогии с п. 2.1.2 определим для задачи (2.28) функцию Лагранжа:

-Пара векторов
(х,
u
) называется
седловой точкой
функции Ф
(х,
и
) в некоторой области
X
x U
, если
для любых
x
∈
X
и
u
∈
U

Неравенства (2.30) также называют неравенствами седловой точки
.
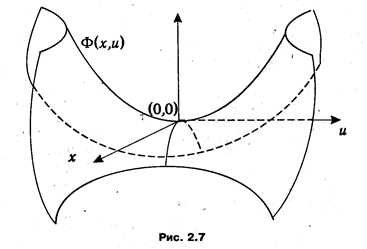
В качестве примера седловой точки может быть приведена точка (0, 0) для функции Ф(х,и
) = -х
2
+ и
2
, определенной на множестве R
х R
. В самом деле, Ф(0,0)=0, Ф(х
,0)=-х
2
, Ф(0, и
) = и
2
, а для любых x
∊R
иu
∊R
выполняются неравенства –х
2
≤0 и 0 ≤и
2
.
На рис. 2.7
изображен график функции Ф(х,и
) (гиперболический параболоид), и, как видно, в окрестности точки (0,0) он действительно по форме напоминает седло, чем и объясняется происхождение соответствующего термина.
2.2.2. Теорема Куна—Таккера.
Центральное место в теории нелинейного программирования занимает теорема Куна— Таккера, которая связывает решение ЗНП с наличием седловой точки у соответствующей функции Лагранжа.
Теорема 2.3. (Достаточное условие экстремума).
Если (х, и) — седловая точка функции Лагранжа, в области
x
∊X
⊇
D
,и≥
0,то х является
оптимальным планом задачи
(2.28), причем справедливо так называемое
правило дополняющей нежесткости:
|

Доказательство.
По определению седловой точки

при всех x
∊X
,и≥
0. Из второго неравенства в (2.32) следует, что

Однако (2.33) может иметь место только тогда, когда gi
(x
)≤0 при всех i
∊1:m
. Действительно, если существует такоеk,
чтоgk
(x
)>0, то, положив и
i
=0 для всехi ≠ k
и выбрав достаточно большое и
k
> 0, можно добиться того, что значение
окажется больше постоянного выражения
Из того, что для всех i
∊1:m
выполняются неравенстваgi
(x
)≤0, следует, что х
является допустимым планом задачи (2.28).
Если в левую часть неравенства (2.33) подставить значения ui
= 0,i
∊1:m
, то получим, что
Вместе с тем из того что,gi
(x
)≤0 и ui
≥0, следует оценка
Совместное рассмотрение последних двух неравенств приводит к правилу дополняющей нежесткости в точке х
:
Тогда на основании левой части неравенства седловой точки (2.32) имеем, что для всех х
∊Х
(в том числе и для х
∊D
)

Но условию ЗНП для любыхх
∊D
верны неравенства gi
(x
)≤0, что, в сочетании с условием ui
≥0, позволяет записать
Значит,
Окончательно получаем, что для любыхх
∊D
справедливо соотношениеf(x)
≥f(x),
т. е. х
— оптимальный план задачи (2.28). -
Утверждение, обратное теореме (2.3), т. е. необходимое условие экстремума в ЗНП, оказывается верным только при выполнении дополнительных условий, которым должна удовлетворять задача (2.28). Важнейшим из них является так называемое условие регулярности Слейтера:
-Говорят, что функция
gi
(х), задающая ограничение в задаче (2.28), удовлетворяет условию регулярности Слейтера, если существует такая точка , принадлежащая области допустимых планов
D,
что

т. е.
является внутренней точкой относительно ограниченияgi
(x).
Поэтому данное условие также называют условием телесности.
Вообще говоря, существуют разные варианты необходимого условия Куна—Таккера. Приведем один из них.
Теорема 2.4.
(Необходимое условие наличия экстремума).
Если
(D, f)
является задачей выпуклого программирования с решением х, ее целевая функция
f(x)
и функции ограничений
gi
(x) —
дифференцируемы, нелинейные ограничения в форме неравенств удовлетворяют условию регулярности Слейтера, то существует такой вектор и
≥ 0, что (х,и) — седловая точка функции Лагранжа
Ф(х,и).
|
Мы не будем здесь приводить доказательство теоремы (2.4), которое является довольно сложным. Заинтересованный читатель может найти его в таких источниках, как [1, 13].
Значение теоремы Куна—Таккера состоит в том, что она позволяет связать процесс решения оптимизационной задачи с поиском седловых точек функции Лагранжа, т. е., грубо говоря, с максимизацией этой функции по х
и минимизацией по и.
ОпределимF(x)
как функцию, ставящую в соответствие каждому значению х
минимальное значение функции Ф(х,и
) по и
:

и по аналогии

Рассмотрим задачу отыскания максимума функцииF(x)

и задачу минимизации G(u)

Очевидно, что

Отсюда следует, что максимум F(x)
находится в допустимой областиD
и совпадает с максимумом целевой функцииf(x)
задачи (2.28):

Таким образом, задача (2.34), в определенном смысле, равносильна (2.28). Аналогичные выводы могут быть получены и для (2.35). Задачи (2.34) и (2.35) образуют двойственную пару. Как нетрудно догадаться, данное отношение является обобщением отношения двойственности для задач линейного программирования. Соответственно, при определенных условиях пара двойственных задач нелинейного программирования обладает свойствами, аналогичными свойствам двойственных линейных задач. В частности, при любых х
∊Х
, и
≥0

Условие (2.36) находит широкое применение при построении оценок в итеративных методах решения оптимизационных задач. Например, если имеется возможность приблизительно решить прямую и двойственную задачи и получить последовательности приближений {х
(q
)
} и {и
(q
)
}, то с помощью неравенств вида

можно определить момент остановки вычислительной процедуры.
В заключение отметим, что возможен вариант вывода выражений для целевых функций и ограничений пары двойственных задач линейного программирования из общего определения отношения двойственности для нелинейных задач. Также отметим, что в процессе формирования нелинейных двойственных задач существует большая неоднозначность: их вид можно варьировать, включая в множество Х
часть ограничений gi
(x)
≤0.
КЛЮЧЕВЫЕ ПОНЯТИЯ
- Общая задача нелинейного программирования.
- Условная и безусловная оптимизация.
- Прямые и непрямые методы решения оптимизационных задач.
- Стационарная точка.
- Градиентные методы.
- Метод наискорейшего спуска и методы дробления шага.
- Выпуклая и вогнутая функции.
- Матрица Гессе.
- Достаточное условие выпуклости (вогнутости).
- Задача выпуклого программирования.
- Допустимое направление.
- Прогрессивное направление.
- Седловая точка.
- Теорема Куна—Таккера.
- Условие регулярности Слейтера.
КОНТРОЛЬНЫЕ ВОПРОСЫ
2.1. При каких условиях оптимизационная задача может быть отнесена к классу нелинейных?
2.2. Приведите пример экономической модели, сводящейся к задаче нелинейного программирования.
2.3. Перечислите основные трудности, возникающие в процессе решения задачи нелинейного
программирования.
2.4. Какой смысл вкладывается в понятие «условная оптимизация»?
2.5. Для чего предназначен метод множителей Лагранжа и в чем он состоит?
2.6. Какая точка называется стационарной?
2.7. Какие принципиальные этапы входят в градиентные методы?
2.8. Для решения каких задач предназначены метод наискорейшего спуска и метод дробления шага?
2.9. Дайте определение выпуклой (вогнутой) функции.
2.10. Сформулируйте достаточное условие выпуклости (вогнутости) функции.
2.11. В чем заключена специфика задач выпуклого программирования?
2.12. Перечислите основные этапы, входящие в метод допустимых направлений.
2.13. Сформулируйте задачу, которая должна быть решена при определении шага в методе
допустимых направлений.
2.14. Исходя из каких соображений определяется допустимое прогрессивное направление?
2.15. Какое условие используется для определения оптимальности текущей точки в методе
допустимых направлений?
2.16. Дайте определение седловой точки. Приведите пример функции, имеющей седловую точку.
2.17. Сформулируйте необходимое и достаточное условия теоремы Куна—Таккера. Какое значение
они имеют для решения задач нелинейного программирования?
2.18. В чем состоит условие регулярности Слейтера? Поясните его содержание.
2.19. Какое условие получило название «правила дополняющей нежесткости»?
2.20. Приведите пример пары двойственных задач нелинейного программирования.
2.21. Какие свойства пары нелинейных двойственных задач могут быть применены для их решения?
ГЛАВА 3. ТРАНСПОРТНЫЕ И СЕТЕВЫЕ ЗАДАЧИ
Методы, рассмотренные в предыдущих главах, носили универсальный характер и были предназначены для решения очень широкого круга линейных и нелинейных задач. Платой за такую универсальность зачастую является снижение их эффективности, выражающееся в медленной сходимости, высоком объеме вычислений и т. п. В то же время существуют такие классы задач, для которых в силу их специфики разработаны более простые методы решения. Некоторых из них мы коснемся в этой главе.
3.1. ТРАНСПОРТНАЯ ЗАДАЧА И МЕТОДЫ ЕЕ РЕШЕНИЯ
3.1.1. Транспортная задача в матричной постановке и ее свойства.
Вернемся к транспортной задаче в матричной, постановке
, о которой мы уже упоминали при рассмотрении вопросов построения математических моделей. Напомним, что данная задача сводится к определению такого плана перевозок некоторого продукта из пунктов его производства в пункты потребления (║xi,j
║m
xn
), который минимизирует целевую функцию

на множестве допустимых планов

при соблюдении условия баланса

Транспортная задача является представителем класса задач линейного программирования и поэтому обладает всеми качествами линейных оптимизационных задач, но одновременно она имеет и ряд дополнительных полезных свойств, которые позволили разработать специальные методы ее решения.
Если привести условия транспортной задачи к канонической форме задачи линейного программирования, то матрица задачи будет иметь размерность (m
+n
)хmn
. Матрицы систем уравнений в ограничениях (3.2) и (3.3) имеют ранги, равные соответственноm
иn
. Однако, если, с одной стороны, просуммировать уравнения (3.2) по m
, а с другой — уравнения (3.3) по n
, то в силу (3.5) получим одно и то же значение. Из этого следует, что одно из уравнений в системе (3.2)-(3.3) является линейной комбинацией других. Таким образом, ранг матрицы транспортной задачи равен m
+n
-1, и ее невырожденный базисный план должен содержать m
+n
-1 ненулевых компонент.
Процесс решения транспортной задачи удобно оформлять в виде последовательности таблиц, структура которых представлена на рис.3.
1
.
Строки транспортной таблицы
соответствуют пунктам производства (в последней клетке каждой строки указан объем запаса продукта а
i
), а столбцы — пунктам потребления (последняя клетка каждого столбца содержит значение потребности bj
). Все клетки таблицы (кроме тех, которые расположены в нижней строке и правом столбце) содержат информацию о перевозке из i
-го пункта в j
-й: в левом верхнем углу находится
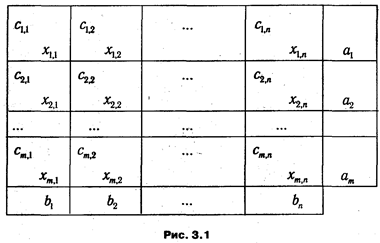
цена перевозки единицы продукта, а в правом нижнем — значение объема перевозимого груза для данных пунктов. Клетки, которые содержат нулевые перевозки (х
i,j
= 0), называют свободными
, а ненулевые — занятыми
(xi,j
>0).
3.1.2. Построение исходного допустимого плана в транспортной задаче.
По аналогии с другими задачами линейного программирования решение транспортной задачи начинается с построения допустимого базисного плана. Наиболее простой способ его нахождения основывается на так называемом методе северо-западного угла
. Суть метода состоит в последовательном распределении всех запасов, имеющихся в первом, втором и т. д. пунктах производства, по первому, второму и т. д. пунктам потребления. Каждый шаг распределения сводится к попытке полного исчерпания запасов в очередном пункте производства или к попытке полного, удовлетворения потребностей в очередном пункте потребления. На каждом шагеq
величины текущих нераспределенных запасов обозначаются а
i
(q
)
, а текущих неудовлетворенных потребностей — bj
(q
)
. Построение допустимого начального плана, согласно методу северо-западного угла, начинается с левого верхнего угла транспортной таблицы, при этом полагаем а
i
(0)
=а
i
, bj
(0)
= bj
. Для очередной клетки, расположенной в строкеi
и столбце j
, рассматриваются значения нераспределенного запаса в i
-ом пункте производства и неудовлетворенной потребности j
-ом пункте потребления, из них выбирается минимальное и назначается в качестве объема перевозки между данными пунктами: xi,j
= min{а
i
(q
)
, bj
(q
)
}. После этого значения нераспределенного запаса и неудовлетворенной потребности в соответствующих пунктах уменьшаются на данную величину:

Очевидно, что на каждом шаге выполняется хотя бы одно из равенств: а
i
(q
+1)
=0 или bj
(q
+1)
=0 . Если справедливо первое, то это означает, что весь запас i
-го пункта производства исчерпан и необходимо перейти к распределению запаса в пункте производства i
+1, т. е. переместиться к следующей клетке вниз по столбцу. Если же bj
(q
+1)
= 0, то значит, полностью удовлетворена потребность для j
-го пункта, после чего следует переход на клетку, расположенную справа по строке. Вновь выбранная клетка становится текущей, и для нее повторяются все перечисленные операции.
Основываясь на условии баланса запасов и потребностей (3.5), нетрудно доказать, что за конечное число шагов мы получим допустимый план. В силу того же условия число шагов алгоритма не может быть больше, чем m
+n
-1, поэтому всегда останутся свободными (нулевыми) mn
-(m+n
-1) клеток. Следовательно, полученный план является базисным. Не исключено, что на некотором промежуточном шаге текущий нераспределенный запас оказывается равным текущей неудовлетворенной потребности (а
i
(q
)
= bj
(q
)
). В этом случае переход к следующей клетке происходит в диагональном направлении (одновременно меняются текущие пункты производства и потребления), а это означает «потерю» одной ненулевой компоненты в плане или, другими словами, вырожденность построенного плана.
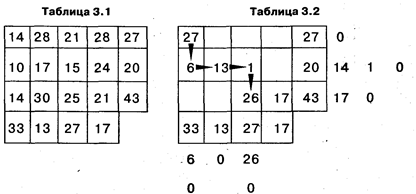
Рассмотрим применение метода северо-западного угла на конкретном примере. Транспортная таблица 3.1 содержит условия некоторой задачи, а в табл. 3.2 показан процесс поиска допустимого плана, включая последовательное изменение объема нераспределенных запасов и неудовлетворенных потребностей. Стрелки отражают траекторию перехода по клеткам транспортной таблицы, а цифры, находящиеся за ее пределами, — текущие нераспределенные остатки после назначения объема для очередной клетки.
Особенностью допустимого плана,, построенного методом северо-западного угла, является то, что целевая функция на нем принимает значение, как правило, далекое от оптимального. Это происходит потому, что при его построении никак не учитываются значения с
i,j
. В связи с этим на практике для получения исходного плана используется другой способ — метод минимального элемента
, в котором при распределении объемов перевозок в первую очередь занимаются клетки с наименьшими ценами.
3.1.3. Критерий оптимальности.
Рассмотрим более подробно структуру матрицы транспортной задачи. Схематично она показана на рис. 3.2.
Из него видно, что матрица имеет размерность (m
+n
)хmn
, состоит из нулей и единиц и распадается на две группы однотипных блоков. Первая (верхняя) соответствует ограничениям на
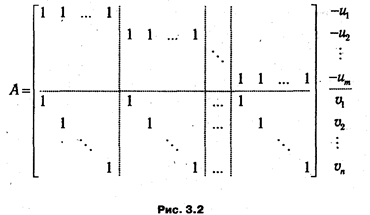
объемы вывоза из пунктов производства, а вторая — ограничениям на удовлетворение потребностей в пунктах производства.
Построим двойственную задачу. С учетом специфической структуры матрицы транспортной задачи вектор двойственных переменных будет иметь размерность m
+n
, причем его компоненты, соответствующие первой группе ограничений, обозначим через (-ui
), i
∊1: m
, а второй — через vj
, j
∊1:n
(рис. 3.2
). Тогда двойственная задача будет иметь вид:
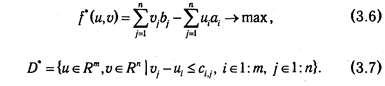
Переменные ui
называют потенциалами пунктов производства
, а vj
— потенциалами пунктов потребления
. Применяя доказанные в главе 1 теоремы двойственности (см. теорему1.7), можно получить критерий оптимальности для плана транспортной задачи:
-Для того, чтобы допустимый план транспортной задачи х
i,j
был оптимальным, необходимо и достаточно, чтобы нашлись такие потенциалы и
i
,
vj
, для которых

Данные условия имеют содержательную экономическую интерпретацию. Потенциалы ui
, и vj
можно рассматривать как цены на перевозимый груз в пунктах производства и потребления (это, кстати, объясняет то, зачем понадобилось обозначать соответствующую двойственную переменную через (-ui
)). Тогда, согласно условию (3.8), для оптимальности плана перевозок требуется, чтобы на тех маршрутах, по которым действительно перевозится груз, его цена в пункте потребления возрастала ровно на цену его перевозки, а в соответствии с условием (3.9) в оптимальномплане цена груза в пункте потребления не может быть меньше его цены в пункте производства с учетом затрат на транспортировку.
3.1.4. Алгоритм метода потенциалов для транспортной задачи.
Критерий (3.8)-(3.9) положен в основу одного из методов решений транспортной задачи, получившего название метода потенциалов
. Впервые он был предложен в 1949г. Л. В. Канторовичем и М. К. Гавуриным. Позже на базе общих идей линейного программирования аналогичный метод был предложен Дж. Данцигом.
Точно так же как транспортная задача является частным случаем задачи ЛП, так и метод потенциалов, вообще говоря, может трактоваться как разновидность симплексных процедур. Он представляет собой итеративный процесс, на каждом шаге которого рассматривается некоторый текущий базисный план, проверяется его оптимальность, и при необходимости определяется переход к «лучшему» базисному плану.
Алгоритм начинается с выбора некоторого допустимого базисного плана (методы его построения были рассмотрены в п. 3.1.2). Если данный план не вырожденный, то он содержит m
+ n
-1 ненулевых базисных клеток, и по нему можно так определить потенциалы ui
и vj
, чтобы для каждой базисной клетки (т. е. для той, в которой х
i,j
> 0) выполнялось условие

Поскольку система (3.10) содержит m
+n
-1 уравнение и m
+n
неизвестных, то один из потенциалов можно задать произвольно (например, приравнять vj
или ui
к нулю). После этого остальные неизвестные ui
и vj
определяются однозначно.
Рассмотрим процесс определения потенциалов текущего плана транспортной задачи на примере. В табл. 3.3 переписаны условия задачи из табл. 3.1 и ее допустимый базисный план, построенный методом северо-западного угла (см. табл. 3.2).
Потенциал первого пункта потребления принимаем равным нулю (v
1
=0). Теперь, зная его, мы можем определить потенциалы для всех пунктов производства, связанных с первым пунктом ненулевыми перевозками. В данном случае их два (это первый и второй пункты), получаем:

Имея u
2
и учитывая, что во второй строке таблицы существуют еще ненулевые компоненты х
2,2
и х
2,3
, можно определить v
2
= u
2
+c
2,2
=-10+17=7 и v
3
=u
2
+c
2,3
=-10+15=5, после чего появляется возможность рассчитать u
3
=v
3
– c
3,3
=5-25 =-20 и, наконец, v
4
=u
3
+c
3,4
=-20 +21=1. В результате получаем полную систему потенциалов, показанную в табл. 3.3.
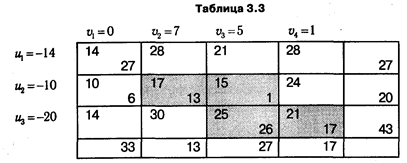
Для свободных клеток транспортной таблицы вычисляются величины αi,j
= vj
-ui
, называемые разностями потенциалов
. В табл. 3.4 они выписаны для всех небазисных клеток под ценами.
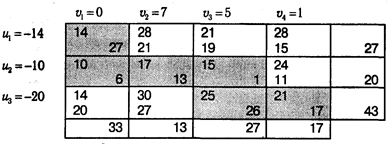
Разность потенциалов αi,j
можно трактовать как увеличение цены продукта при его перевозке из пункта i
в пункт j
. Согласно критерию оптимальности (3.8)-(3.9), если все αi,j
≤ с
i,j
, то план оптимален, в противном случае, если существует хотя бы одна разность потенциалов αi,j
> с
i,j
, то он может быть улучшен. Процесс «улучшения» плана состоит в определении вводимой и выводимой клеток, в чем прослеживается содержательная аналогия с соответствующими пунктами симплекс-процедур.
Кандидатом на ввод, очевидно, может быть любая клетка, в которой αi,j
> с
i,j
, поскольку после ввода в базис будет обеспечено равенство αi,j
= с
i,j
. Для определенности обычно рекомендуется брать ту клетку, в которой оценка
αi,j
-с
i,j
максимальна. В рассматриваемом нами примере это будет клетка (3, 1).
Выводимая клетка определяется с помощью так называемой цепочки преобразования плана
, описывающей характер перераспределения грузовых потоков. В соответствии со свойствами транспортной задачи для невырожденного базисного плана в текущей таблице можно образовать замкнутую цепочку, состоящую только их вертикальных и горизонтальных звеньев, одной из вершин которой является выбранная свободная клетка, а остальные — занятые клетки. В табл. 3.5 показана цепочка преобразования текущего плана относительно вводимой в него клетки (3, 1).
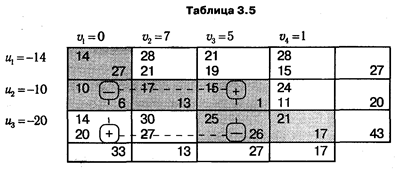
Логика алгоритма построения цепочки достаточно проста:«выйдя» из клетки (3,1) в горизонтальном направлении, мы должны «остановиться» в той занятой клетке плана, из которой сможем двигаться дальше по вертикали. В данном примере этому требованию удовлетворяют как клетка (3,3), так и клетка (3,4). Однако цепочка от (3,4) не может быть продолжена дальше, в то время как двигаясь от (3,3) по вертикали к (2,3) и далее к (2,1), мы возвращаемся к исходной клетке (3,1) и образуем замкнутый цикл.
В построенной цепочке, начиная с вводимой клетки (которая считается первой), помечаются вершины: нечетные — знаком «+», а четные знаком «—». Знаком «+» отмечаются те клетки, в которых объемы перевозок должны увеличиться (таковой, в частности, является клетка, вводимая в план, поскольку она должна стать базисной). Знаком «—» — те клетки, в которых перевозки уменьшаются с целью сохранения баланса. Среди множества клеток, помеченных знаком «—», выбирается клетка с наименьшим значением х
i,j
(обозначим его θ). Она и становится кандидатом на вывод, т. к. уменьшение объема перевозок на большую величину может привести к отрицательным значениям х
i,j
в других «минусовых» клетках. Затем производится пересчет плана по цепочке: к объемам перевозок в клетках, помеченных знаком «+», добавляется объем θ, а из объемов клеток, помеченных знаком «—», он вычитается. В результате ввода одной клетки и вывода другой получается новыйбазисный план, для которого на следующей итерации описанные выше действия повторяются.
В нашем примере знаком «—» отмечены клетки (2,1) и (3,3), причемx
2,1
= 6,x
3,3
=26. Вычислив значение θ = min{x
2,1
, x
3,3
} = 6, осуществляем преобразование и переходим к следующему базисному плану, показанному в табл. 3.6.
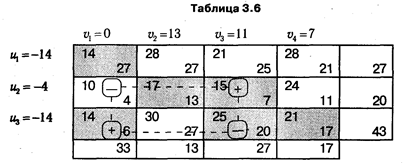
Для вновь полученного плана повторяются действия стандартной итерации: рассчитываются потенциалы и оценки для небазисных клеток транспортной таблицы. Как можно видеть, план в табл. 3.6 также не является оптимальным (в клетке (1,3) αi,j
=25 > с
i,j
=21), поэтому вновь строим цепочку преобразования плана и переходим к следующему базисному плану (табл. 3.7).
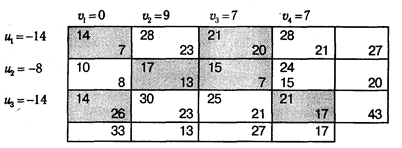
Из транспортной таблицы 3.7 видно, что полученный план оптимален, так как все разности потенциалов для небазисныхклеток αi,j
= vj
– ui
не превышают соответствующих цен с
i,j
. По данному плану вычисляется оптимальное (наименьшее) значение суммарных издержек на перевозку

Завершая разговор о методе потенциалов, следует отдельно остановиться на ситуации возникновения вырожденного плана. Возможность получения вырожденного плана уже отмечалась при описании метода северо-западного угла. Нетрудно заметить, что вырожденный план также может получиться на этапе преобразования текущего плана по цепочке: если одинаковое минимальное значение будет достигнуто сразу на нескольких клетках, помеченных знаком «—», то при вычитании перемещаемого по цепочке объема в новом плане будет меньше чем m
+n
-1 ненулевых компонент. Способ преодоления вырожденности в транспортной задаче весьма прост, а именно:предлагается дополнить текущий план необходимым количеством нулевых клеток (фиктивными перевозками) таким образом, чтобы они позволяли рассчитать полную систему потенциалов, и далее действовать в соответствии с правилами описанного выше алгоритма. Фактически здесь мы имеем дело не с чем иным, как с аналогом метода возмущений для транспортной задачи как частного случая ЗЛП. К такому выводу легко прийти, если положить, что добавляемые фиктивные клетки содержат некоторый малый объем ε.
3.2. СЕТЕВЫЕ ЗАДАЧИ
3.2.1. Основные понятия и определения.
Многие экономические задачи, такие как перевозка грузов, перекачка нефти и газа по трубопроводам, управление запасами и т. п., удобно моделировать и решать в терминах сетей и потоков. Основой подобного рода моделей служат ориентированные или неориентированные графы. Приведем некоторые определения.
-Ориентированным графом
называется тройка
(I, D, G),
в которой
I —
непустое множество
вершин
,D
— множество
дуг
и
G
— отображение, которое каждой дуге
d
∊
D
ставит в соответствие упорядоченную пару вершин
(i, j)
, где
i, j
∊
I.
-Неориентированным графом
называется тройка (
I
,
D
, G), в которой
I —
непустое множество
вершин
, D
— множество
ребер
и G — отображение, которое каждому ребру d
∊D ставит в соответствие неупорядоченную пару вершин
[i,
j
], где
i, j
∊ I.
Граф (I
, D, G
) называется конечным
, если множестваI
и D
конечны.
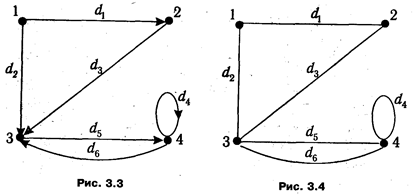
Геометрически граф может быть представлен в виде множества точек (изображающих вершины) и соединяющих их линий (со стрелками), соответствующих ребрам (дугам) (рис. 3.3, 3.4
). Очевидно, что с каждым ориентированным графом можно однозначно связать неориентированный, заменив дуги на ребра. Если любые две вершины графа соединяются не более чем одной дугой (ребром), то граф называется простым
и может быть задан с помощью пары (I
, D
). В этом случае каждая дуга (ребро)d
полностью определяется парой соединяемых вершин (i
, j
), что условно записывается в виде:d=(i,j).
Упорядоченная пара вершин (i, j
), которая ставится в соответствие некоторой дуге d
, задает ее ориентацию: i
называется началом
дуги, аj
— ее концом
, а сама дуга считается инцидентной
данным вершинам.
Путем длины п
в ориентированном графе (I
,D
) называется упорядоченная последовательность различных дуг (d
1
, d
2
,..., dn
), для которых начало каждой последующей совпадает с концом предыдущей. Конечный путь, у которого начальная вершина совпадает с конечной, называется контуром.
Для неориентированного графа аналогом понятия путь является цепь
, а контура — цикл
.
Если две любые вершины неориентированного графа могут быть соединены цепью, то он называется связным
. Ориентированный граф называется связным, если ему отвечает связный неориентированный граф.
Связный неориентированный граф, не содержащий циклов,называется деревом
.
Если Y
⊂D
, а отображениеGY
является сужением отображенияG
на множество Y
, то граф (I
, Y
, GY
) называют частичным графом
(реберным подграфом) графа (I
, D, G
).
Рассмотрим задачу: имеется конечный граф (I
, D, G
), каждой вершине i
которого сопоставлено некоторое число bi
, называемое интенсивностью вершины
. Граф (I
, D, G
), вершинам которого сопоставлены значения интенсивностей bi
, будем называть сетью
. Если bi
> 0, то вершина i
называется источником
, если bi
< 0, то — стоком
, а если bi
= 0, то — нейтральной
вершиной. Множество источников, стоков и нейтральных вершин обозначим соответственноI
+
, I
-
,I
0
.
Для определенной выше сети потоком
называется такая совокупность величин, заданных на множестве дуг, Х
={х
d
}d
∊
D
,что

где Di
+
— множество дуг, исходящих из вершины i
, a Di
-
— множество дуг, входящих в нее. Величина х
d
называется значением потока
по дуге d
и содержательно интерпретируется как количество продукта, пропускаемого по данной дуге.
Соотношение (3.11) означает, что для любой вершины сети разность выходящего и входящего потоков равна ее интенсивности.
На базе введенной терминологии может быть сформулировано много различных задач. Рассмотрим наиболее известные из них. Для каждой дуги d
∊D
определим значения cd
≥ 0, называемые стоимостью перемещения единицы продукта
по дуге, тогда суммарная стоимость потока Х
примет вид

Задачу минимизации функции (3.13) при ограничениях (3.11)-(3.12) обычно называют линейной сетевой задачей
. Очевидно, что она является задачей линейного программирования. Если дополнительно для каждой дуги сетиd
∊D
определить величины rd
≥ 0, называемые пропускными способностями
, то, добавив ограничения

мы получаем задачу о потоке в сети с ограниченными пропускными способностями.
Приведенные формулировки задач специально даны в столь абстрактном виде, что позволяет подчеркнуть их универсальность. К очевидной сфере их приложения относится организация грузоперевозок в транспортной сети. В таких моделях вершины i
трактуются как пункты, соединенные сетью дорог, и характеризуются потребностями в некотором продукте (bi
<0) или его запасами (bi
>0). Задачи определения плана, минимизирующего затраты на перевозки, которые с математической точки зрения полностью идентичны (3.11)-(3.13), (3.14), также называют транспортными задачами в сетевой постановке.
3.2.2. Метод потенциалов для транспортной задачи в сетевой постановке.
Рассмотрим задачу определения оптимального потока Х
в некоторой сети (I
,
D, G
), для которого

при ограничениях
где rd
≥ 0. Предполагается также, что сеть является сбалансированной, т. е.

Для задачи (3.15)-(3.17) справедлив критерий оптимальности:
-Для того, чтобы допустимый поток Х={х
d
}
d
∊
D
(т. е. удовлетворяющий условиям
(3.16)-(3.17)) был оптимальным, необходимо и достаточно существование для каждой вершины
i
∊
I
такого числа
vi
, называемого
потенциалом
, что для всех дуг
d
=
(i, j)
Заметим, что логика обоснования данного критерия абсолютно идентична той, которая использовалась для обоснования критерия оптимальности плана транспортной задачи в матричной постановке: построение двойственной задачи и применение соответствующей теоремы двойственности.
Для решения транспортной задачи в сетевой постановке (3.15)-(3.17) также может быть применен метод потенциалов
, который является обобщением описанного выше метода потенциалов для транспортной задачи в матричной постановке.
Поскольку задача (3.15)-(3.17) является частным случаем задачи линейного программирования, ее можно привести к канонической форме. При этом достаточно просто устанавливается, что ранг матрицы задачи равен m
-1, где m
— количество вершин в сети. Введем дополнительно еще некоторые понятия, используемые при описании свойств сетевых задач.
Остовом
сети (I
, D, G
) называется любое ее частичное дерево (частичный граф, являющийся деревом). Справедливо утверждение:
-Произвольному остову сети
(I, D, G)
соответствует базис задачи
(3.15)-(3.17) и наоборот.
Пусть имеется некоторый поток Х={х
d
}
d
∊
D
. Рассмотрим множество дуг D(X)
= {d
∊D
| 0 < xd
< rd
}. Опорой
потока Х
называется частичный граф (I
,
D(X), G
). Говорят, что поток Х невырожден
, если его опора (7, D(X), G) является остовом сети (I, D, G
). Иными словами, используя терминологию транспортной задачи, в невырожденном потоке, которому отвечает допустимый базисный план задачи, дороги, по которым осуществляются перевозки груза, не достигающие по объему ограничения на пропускную способность, образуют остов (связанную подсеть без циклов) рассматриваемой транспортной сети.
Теперь дадим краткое описание схемы метода потенциалов для транспортной задачи в сетевой постановке.
1°. Предполагается, что в начале очередной итерации q
имеется некоторый допустимый невырожденный поток
Х={х
d
(q
)
}
d
∊
D
(о методах его генерации на начальном этапе будет сказано в дальнейшем).
По имеющемуся потоку Х
(q
)
строится система потенциалов пунктов сети. Для этого выбирается произвольный пунктi
0
, потенциал которого полагаетсяvi
0
=0. Множество вершин, смежных с i
0
, обозначим через I
(i
0
). Тогда для любой вершины j
∊ I
(i
0
) потенциалы рассчитываются по правилу

если (i
0
,j
)∊D
(X
(q
)
) (дуга направлена от i
0
),и

если (j
,i
0
)∊G
(D
(X
(q
)
)) (j
,i
0
)∊D
(X
(q
)
) (дуга направлена кi
0
).
Получив очередную группу вершин с известными потенциалами, мы имеем возможность на основе (3.22)-(3.23) вычислить потенциалы для следующей группы смежных вершин и т. д., пока не будут определены все потенциалы. Возможность сделать это единственным образом вытекает из свойства отсутствия циклов у остова сети.
Имея полную систему потенциалов, для всех дуг следует проверить условия критерия оптимальности (3.19)-(3.21). Если они выполняются, то текущий поток Х
(q
)
— оптимальный и, следовательно, алгоритм завершен; в противном случае — переходим к построению следующего «улучшенного» потока.
2°. По аналогии с другими методами последовательного улучшения плана очередной поток получается за счет «ввода» в него одной дуги и «вывода» другой. Если условия критерия оптимальности нарушаются сразу для нескольких дуг, то для ввода имеет смысл выбрать ту, на которой достигается максимальное отклонение цены от разности потенциалов соединяемых вершин. Пусть для ввода выбрана некоторая дугаdl
= (s,
t
), направленная из вершины s
в вершину t
. Из правил построения потенциалов следует, что в остове существуют две цепи, одна из которых соединяет базовую вершину i
0
, потенциал которой был принят равным нулю, с s
, а другая — i
0
с t.
Если дополнить остов дугойdl
,
образуется единственный цикл. Построенныйцикл является аналогом цепочки преобразования плана в методе потенциалов для транспортной задачи в матричной постановке. Обозначим черезD+
(s,t
)
множество дуг данного цикла, ориентация которых совпадает с ориентацией дугиdl
= (s, t
), а через D-
(s,t
)
— множество дуг, имеющих противоположную ориентацию. Определим величину возможной корректировки объемов грузоперевозок, «перемещаемых» по циклу

Идея формулы (3.24) достаточно прозрачна: при циклическом преобразовании текущего потока увеличиваются объемы грузоперевозок на тех дугах, которые сонаправлены вводимой дуге, и уменьшаются на дугах, имеющих обратную ориентацию. Соответственно, при добавлении мы должны следить за тем, чтобы не превысить ограничения на пропускные способности (θ ≤ r
d
–х
d
(q
)
), а при вычитании — за неотрицательностью х
d
(q
)
. После определения θ происходит пересчет компонент текущего потока по формуле
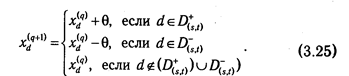
В результате мы получаем новый допустимый поток х
d
(q
+1)
), полагаем номер текущей итерацииq
+1 и переходим к п. 1°.
В описанном алгоритме, как и в случае с матричной транспортной задачей, мы не гарантированы от возникновения вырожденного потока. Как уже упоминалось выше, такому потоку будет соответствовать несвязная опора. Для преодоления вырожденности рекомендуется включить в текущий план фиктивные компоненты с нулевыми объемами так, чтобы соответствующие им дуги дополняли опору до остова сети. Построенный таким способом план позволяет выполнитьвсе действия, входящие в стандартную итерацию метода потенциалов.
Отдельно следует остановиться на методах генерации исходного допустимого потока. Наиболее простой из них (хотя, возможно, и наименее рациональный) основан на идеях, сходных с идеями метода минимизации невязок, используемого для построения допустимого базисного плана ЗЛП. Данный метод предполагает решение соответствующей вспомогательной задачи, которая получается из основной в результате следующих преобразований:
1. К множеству вершин сети добавляется фиктивная нулевая вершина с нулевой интенсивностью (b
0
= 0).
2. Все вершины, имеющие отрицательную интенсивность (спрос) bi
< 0, соединяются с добавленной вершиной 0 входящими дугами (0, i
), а вершины, обладающие положительной интенсивностью (запасом) bi
>0, — исходящими дугами (i
,0). Ограничения на пропускные способности для добавляемых дуг отсутствуют.
3. Стоимости перемещения единицы продукта для вновь добавленных дуг полагаются равными 1, а для дуг, соответствующих транспортной сети основной задачи, — 0.
Построенная вспомогательная задача обладает очевидным допустимым невырожденным потоком, получаемым назначением объемов, равных интенсивностям вершин, по всем добавленным дугам. Решив вспомогательную задачу, мы либо получим допустимый поток для основной задачи, либо придем к выводу об отсутствии у нее допустимых планов.
3.2.3. Задача о кратчайшем пути.
Классическим примером сетевых задач является определение кратчайшего пути между вершинами сети. Пусть задан граф (I
,
D, G
), каждой дуге которого поставлено в соответствие число cd
, называемое длиной
. Также пусть выделены две вершины графаs
иt
, и требуется найти путь наименьшей длины, ведущий из вершины s
в вершину t.
Если в графе имеются «кратные» дуги, соединяющие одинаковые начало и конец, то достаточно оставить одну — с наименьшей длиной, а остальные отбросить. Таким образом, достаточно рассматривать задачу о кратчайшем пути для простогографа (I
,
D
), в котором дуги определяются упорядоченными парами вершинd
= (i
,j
). Тогда естественно путьL
, идущий из вершины s
в вершину t
, задавать в виде упорядоченного набора вершин, через которые проходит данный путь:

а длины дуг обозначать как cd
= ci,j
.
Длина описанного выше произвольного пути L
определяется по формуле

Легко заметить, что задача о кратчайшем пути является частным случаем транспортной задачи в сетевой постановке (или, что то же самое, задачи об оптимальном потоке). Для этого достаточно присвоить вершине s
единичный запас, вершине t
единичную потребность, все остальные вершины положить нейтральными, а дугам присвоить неограниченные пропускные способности. Однако, как правило, более рациональным оказывается использование конкретных свойств данной задачи и решение ее специальными (частными) методами. К их числу относится, например, метод Минти, основные идеи которого мы изложим ниже.
Метод Минти
решения задачи о кратчайшем пути в сети представляет собой итеративный процесс, в ходе которого строится путьL=(s=i
0
,
i
1
, ...,
ip-
1
, ip
=t).
На предварительном (нулевом) этапе алгоритма:
- формируется массив значений так называемых модифицированных длин  i,j
,
которые перед началом первой итерации полагаются равными с
i,j
≥0;
i,j
,
которые перед началом первой итерации полагаются равными с
i,j
≥0;
- осуществляется отметка вершиныi
0
= s
числом mi
0
=0.
Стандартная итерация включает этапы:
1°. Отметка вершин сети
. Обозначим множество вершин cети, отмеченных на предыдущих итерациях, как  (на первой итерации
={i
0
}). Для каждой вершиныi
∊
ищутся дуги, соединяющие ее с еще не помеченными вершинами-потомками j
, модифицированная длина которых
i,j
= 0. Найденные таким способом вершины j
помечаются числом mj
=i
, указывающим на «родителя». В том случае, когда сразу несколько дуг, имеющих
i,j
= 0, заканчиваются в одной и той же вершине j
, значение для ее пометки выбирается произвольно.
(на первой итерации
={i
0
}). Для каждой вершиныi
∊
ищутся дуги, соединяющие ее с еще не помеченными вершинами-потомками j
, модифицированная длина которых
i,j
= 0. Найденные таким способом вершины j
помечаются числом mj
=i
, указывающим на «родителя». В том случае, когда сразу несколько дуг, имеющих
i,j
= 0, заканчиваются в одной и той же вершине j
, значение для ее пометки выбирается произвольно.
Если среди вновь помеченных вершин окажется вершинаt
, то, значит, найден искомый путь (i
0
, i
1
,..., i
(p-
1)
, ip
), где

на чем алгоритм завершается.
В случае, если вершины t
нет среди отмеченных, и одновременно нельзя отметить ни одной новой вершины, то переходим к этапу 2.
2°. Преобразование значений модифицированных длин дуг
. Для каждой вершиныi
∊
ищутся дуги, соединяющие ее с еще не помеченными вершинами j
, и находятся

Далее модифицированные длины всех дуг, которые соединяют отмеченные вершины с неотмеченными (i
∊
,j
∉
), уменьшаются на величину

в результате чего кратчайшие неиспользованные дуги получают нулевую модифицированную длину.
Затем происходит переход к следующей итерации.
Путь, построенный по методу Минти, будет кратчайшим. Это можно доказать с помощью индукции по номеру итерации, на которой была помечена вершина t
, или, что то же самое, по количеству дуг, составляющих кратчайший путь. Если это произошло на первом шаге (что возможно только в случае, если начальная и конечная вершины соединены дугой нулевой длины), то доказываемое утверждение очевидно. Предположим,
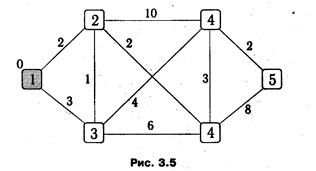
что оно верно для всех пунктов, помеченных за первые r
итераций, т. е. тех, которые достигаются переходом по r
дугам. Тогда, если конечная вершина t
помечена на (r
+ 1)-ой итерации, то полученный путь также будет кратчайшим, так как данная вершина помечается в результате минимально возможного продолжения одного из путей, полученного за предыдущие r
итераций и являющегося по предположению кратчайшим.
Отметим, что описанный алгоритм пригоден для построения кратчайших путей на неориентированных графах.
Рассмотрим изложенный метод на конкретном примере, а именно: определим кратчайший путь из вершины 1 в вершину 6 для неориентированной сети, показанной на рис. 3.5.
На предварительном этапе вершина 1 отмечается числом m
1
= 0, а модифицированные длины совпадают с заданными длинами дуг.
Итерация 1.
Так как из вершины 1 не выходят дуги нулевой длины, дальнейшая отметка вершин невозможна. Переходим к этапу 2. Смежными с вершиной 1 являются вершины 2 и 3. Для них определяем ∆ = min{
1,2
,
1,3
}=2 и вычитаем ее из
1,2
,
1,3
. После преобразования имеем
1,2
= 0,
1,3
= 1.
Итерация 2.
Помечаем вершину 2 m
2
= 1 (см. рис. 3.6
). Дальнейшая пометка невозможна, поэтому переходим к этапу 2. Смежными с помеченными вершинами 1 и 2 являются вершины 3,4,5. Из чего определяем ∆ = min{
1,3
,
2,3
,
2,4
,
2,5
}=1 ипосле соответствующего преобразования имеем

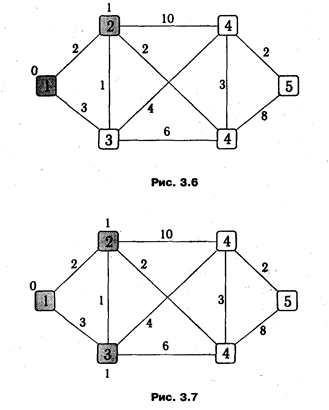
Итерация
3
.
В вершину 3 ведут дуги нулевой длины как из вершины 1, так и из вершины 2. Поскольку выбор здесь может быть произвольным, пометим вершину 3 числом m
3
= 1 (рис. 3.7
). Дальнейшая пометка невозможна, поэтому переходим к этапу 2. Смежными с ранее отмеченными вершинами являются вершины 4,5. Из чего определяем ∆ = min{
2,4
,
2,5
,
3,4
,
3,5
}=1 и после преобразования имеем
2,4
=8,
2,5
=0,
3,4
=3,
3,5
=5.
Итерация 4.
Помечаем вершину 4 m
4
=2 (см. рис. 3.
8
). Дальнейшая пометка невозможна, поэтому переходим к этапу 2. Смежными с ранее помеченными вершинами являются вершины 5,6. Из чего определяем ∆ = min{
2,5
,
3,5
,
4,5
,
4,6
}=3 и после преобразования имеем
2,5
=5,
3,5
=0,
4,5
=0,
4,6
=5.
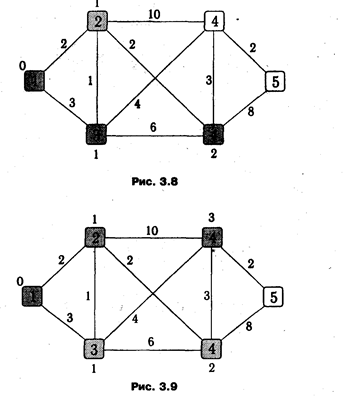
Итерация 5.
В вершину 5 ведут дуги нулевой длины как из вершины 3, так и из вершины 4. Руководствуясь теми же соображениями, что и на итерации 3, пометим вершину 5 числом m
5
=3 (рис. 3.9
). Дальнейшая пометка невозможна, поэтому переходим к этапу 2. Смежной с ранее отмеченными вершинами является вершина 6. Из чего определяем ∆ = min{
4,6
,
5,6
}=2 и после преобразования имеем
4,6
=3,
5,6
=0.
Итерация 6.
В вершину 6 ведет дуга нулевой длины из вершины 5, поэтому помечаем ее числом m
6
=5 (см. рис. 3.10
). Поскольку мы отметили конечную вершину маршрута, то алгоритм завершен и мы можем, используя значения отметок для родителей, выписать искомый кратчайший путь (1, 3, 5, 6).
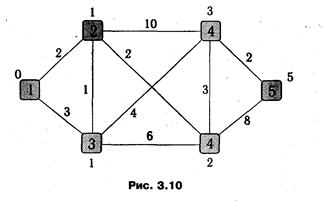
Следует также добавить, что если бы наш выбор на итерациях 3 и 5 был иным, то мы получили бы альтернативный путь той же длины (1, 2, 4, 5, 6), т. е. рассмотренная задача имеет несколько решений.
КЛЮЧЕВЫЕ ПОНЯТИЯ
- Транспортная таблица
- Метод северо-западного угла.
- Потенциал.
- Цепочка преобразования плана.
- Граф (ориентированный и неориентированный).
- Ребра и вершины.
- Путь и контур.
- Цепь и цикл.
- Связность.
- Дерево.
- Частичный граф.
- Транспортная сеть.
- Поток.
- Линейная сетевая задача.
- Остов сети.
- Опора потока.
- Невырожденный поток.
- Задача о кратчайшем пути.
- Алгоритм Минти.
КОНТРОЛЬНЫЕ ВОПРОСЫ
3.1. Какие специфические свойства позволяют выделить транспортные задачи в отдельный класс из
множества задач линейного программирования?
3.2. Опишите метод построения допустимого плана транспортной задачи.
3.3. Сколько ненулевых элементов должен содержать невырожденный базисный план транспортной
задачи?
3.4. Сформулируйте критерий оптимальности для допустимого плана транспортной задачи.
3.5. Что положено в основу метода потенциалов?
3.6. Из чего вытекает критерий оптимальности допустимого плана транспортной задачи?
3.7. Перечислите основные этапы метода потенциалов.
3.8. Какие условия должны быть соблюдены при построении цепочки преобразования плана в методе
потенциалов?
3.9. Что следует делать при возникновении ситуации вырожденности текущего плана в транспортной
задаче?
3.10. Приведите формулировку линейной сетевой задачи.
3.11. Покажите, что транспортная задача в матричной постановке является частным случаем
транспортной задачи в сетевой постановке.
3.12. Дайте определение понятия «остов сети». Какая связь существует между остовом сети и
базисом транспортной задачи в сетевой постановке?
3.13. Какой поток называют невырожденным?
3.14. Перечислите основные этапы метода потенциалов для транспортной задачи в сетевой
постановке.
3.15. Каким способом можно получить допустимый поток в транспортной сети?
3.16. В чем состоит задача о кратчайшем пути?
3.17. Перечислите основные этапы метода Минти.
ГЛАВА 4. ДИСКРЕТНОЕ
ПРОГРАММИРОВАНИЕ
4.1. ТИПЫ ЗАДАЧ ДИСКРЕТНОГО ПРОГРАММИРОВАНИЯ
4.1.1. Основные понятия.
Многие экономические задачи характеризуются тем, что объемы управляемых ресурсов (в силу тех или иных объективных свойств) могут принимать только целые значения. Математическая формализация данных ситуаций приводит к моделям дискретного программирования. В общем виде задача дискретного программирования может быть сформулирована как задача нахождения максимума (или минимума) целевой функцииf
(x
1
, x
2
,...,xn
) на множествеD
, определяемом системой ограничений

где Ω— некоторое конечное, или счетное*, множество. Условие х
∊Ω. называется условием дискретности.
Особое место среди дискретных задач занимает целочисленная задача линейного программирования в канонической форме
(ЦКЗЛП):
* Напомним, что примерами счетных множеств являются множества натуральных, целых и рациональных чисел.

где Z
+
={0; 1; 2; ...} — множество неотрицательных целых чисел.
Заметим, что в некоторых ситуациях требование «целочисленности» может быть наложено лишь на некоторые переменныеxj
, что кардинально не меняет характера задачи.
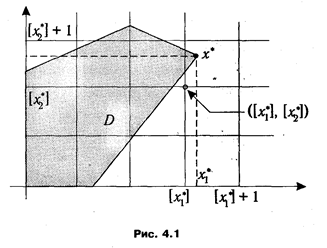
Принципиальная сложность, вызываемая наличием условий целочисленности в системе ограничений оптимизационной задачи, состоит в том, что в значительном количестве случаев невозможно заменить дискретную задачу ее непрерывным аналогом и, найдя соответствующее решение, округлить его компоненты до ближайших целых значений. Пример, показанный на рис. 4.1
, демонстрирует, что при округлении оптимального плана х
*
обычной задачи ЛП до целых значений получается точка ([х
1
*],[x
2
*
]), не принадлежащая области допустимых планов задачи D
. Условимся целую часть числа х
j
. обозначать [х
j
], а дробную — как {х
j
}. Тогда х
j
=[х
j
]+{х
j
}. Отдельно следует добавить, что если даже оптимальный план непрерывной задачи,округленный до целых значений компонент, окажется допустимым, то целевая функция может вести себя так, что ее значение будет на нем существенно «хуже», чем на оптимальном плане целочисленной задачи.
Перечисленные проблемы предопределили необходимость разработки специальных методов решения дискретных и целочисленных задач. Но прежде чем говорить собственно о методах решения, более подробно остановимся на классификации задач дискретного программирования. В литературе, как правило, выделяют следующие классы дискретных оптимизационных задач:
- задачи с неделимостями;
- экстремальные комбинаторные задачи;
- задачи с разрывными целевыми функциями;
- задачи на несвязных и невыпуклых областях и др.
4.1.2. Задачи с неделимостями.
В подавляющем большинстве случаев наличие условий неделимости определяется физическими свойствами моделируемых объектов. Так, например, они могут появиться в качестве дополнительных ограничений в уже рассматривавшейся нами выше задаче производственного планирования, если в ней осуществляется управление выпуском крупной штучной продукции.
Классическим представителем задач данного класса стала так называемая задача о ранце
. Ее фабула носит достаточно условный характер и состоит в том, что солдат (или турист), собирающийся в поход, может нести груз весом не болееW
кг. Этот груз может состоять из набора предметов n
типов, каждый предмет типа j
веситwj
кг и характеризуется некоторой «полезностью» uj
, j
∊ 1: n
. В рамках описанной ситуации вполне естественным представляется вопрос: сколько предметов каждого вида нужно положить в ранец, чтобы его суммарная полезность была максимальной? Если в качестве компонент плана х
j
. принять количество укладываемых предметов типа j
, то данную задачу можно записать:

Как нетрудно заметить, представленная математическая модель носит универсальный характер, и к ней могут быть сведены многие экономические задачи. Ярким подтверждением этому служит и тот факт, что в литературе она также известна как задача о загрузке судна.
4.1.3. Комбинаторные задачи.
К данному классу относятся задачи оптимизации функции, заданной на конечном множестве, элементами которого служат выборки из n
объектов.
Классическим представителем математических проблем такого рода стала задача о коммивояжере
. Она состоит в составлении маршрута посещения торговым агентом, находящимся в некотором начальном пункте, n
других городов при условии, что задана матрица стоимостей переездов из города в город

(с учетом начального). Причем допустимым является такой маршрут, который предусматривает однократное
посещение всех
городов и возвращение в исходный пункт. Очевидно, что наилучший маршрут должен минимизировать суммарную стоимость переездов.
Планом задачи является маршрут коммивояжера, и его можно задать с помощью так называемой матрицы смежности

элементы которой определяются следующим образом:
1, если в маршруте предусмотрен переезд из пунктаi
в j
,
xi,j
= 0, если в маршруте не предусмотрен переезд из пункта i
в j
,
причем по условию задачи xii
=0, i
∊1: n
.
Допустимыми планами служат связные маршруты, однозначно определяемые упорядоченным набором посещаемых пунктов:

Каждый такой маршрут можно отождествить с перестановкой n
чисел (упорядоченной выборкой из n
элементов по n
). В свою очередь, таким перестановкам взаимно однозначно соответствуют матрицы X
, у которых в каждой строке и каждом столбце содержится точно одна единица.
С учетом сказанного задача коммивояжера принимает вид целочисленной задачи линейного программирования:
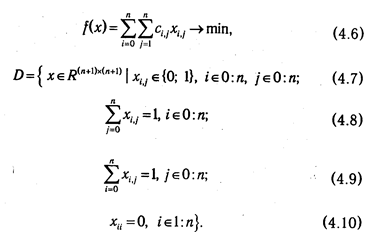
Условия (4.8) и (4.9) с содержательной точки зрения означают, что в каждый пункт можно въехать и выехать только один раз. Приведенная форма записи задачи коммивояжера (4.6)-(4.10) не является самой рациональной и предназначена только для того, чтобы подчеркнуть ее общность с другими задачами дискретного программирования. Существует и другая форма, которая более ярко отражает комбинаторный характер данной проблемы:

гдеD
— множество перестановок чисел от 1 до n
.
Отдельно следует остановиться на том, что задача коммивояжера имеет большое количество содержательных аналогов. Скажем, к аналогичной модели приведет задача разработки графика переналадки оборудования, которое может выпускать разные типы изделий, но требует определенных затрат (временных или материальных) при переходе с одного технологического режима на другой.
4.1.4. Задачи с разрывными целевыми функциями.
Как уже упоминалось выше, многие экономические системы характеризуются наличием так называемых постоянных затрат, которые должны быть произведены независимо от объема производства. Учет в моделях этих и подобных факторов приводит к появлению в них целевых функций, не обладающих свойством непрерывности. В качестве примера может быть приведена транспортная задача с фиксированными доплатами
. Она отличается от транспортной задачи в матричной постановке, рассмотренной в главе 3, тем, что в ней затраты по перевозке груза из i
-го пункта производства в j
-й пункт потребления определяются как

где с
i,j
— по-прежнему издержки на перевозку единицы груза;
di,j
— фиксированная доплата за аренду транспортныхсредств.
При таких предпосылках целевая функция суммарных затрат на перевозку
содержит «скачкообразные» разрывы, что существенно затрудняет ее минимизацию, поэтому стандартный метод решения основан на следующем преобразовании. Если ввести вспомогательные переменные у
i,j
, такие, что

то целевая функция примет вид

Действительно, если у
i,j
=0 , то переменные х
i,j
=0, а при у
i,j
=1 неравенства (4.15) становятся несущественными, поскольку они и так справедливы для любого опорного плана. Следовательно, задача (4.16) эквивалентна исходной задаче (4.13). В силу характера ограничений (4.14)-(4.15) задача (4.16) является задачей частично-целочисленного программирования.
Перечисленные примеры далеко не исчерпывают всего многообразия задач дискретного программирования. Однако более подробное их рассмотрение требует привлечения достаточно сложного математического аппарата и выходит за рамки данной книги.
В последующих параграфах мы остановимся на способах решения наиболее известных и хорошо изученных дискретных задач. Излагаемые ниже методы не имеют универсального характера, с каждым из них связаны определенные ограничения и, соответственно, ответ на вопрос о выборе того или иного из них зависит от конкретных особенностей решаемой задачи. Более того, цель изложения состоит в том, чтобы создать у читателя общие представления об основных идеях и подходах, не углубляясь далеко в вычислительные и математические тонкости, которыми буквально изобилуют алгоритмы дискретного программирования. Заметим также, что достаточно эффективный и широко применяемый подход к решению целочисленных задач основан на сведении их к задачам транспортного типа. Это объясняется тем, что если в условиях транспортной задачи значения запасов (а
i
) и потребностей (bj
) являются целочисленными, то целочисленным будет и оптимальный план.
4.2. МЕТОД ГОМОРИ
4.2.1. Основные идеи и принципы
*. Данный метод, который также носит название метода отсекающих плоскостей
, предназначен для решения ЦЗЛП в канонической форме (4.2)-(4.3). Кратко представим его основные идеи.
* Впервые был предложен Р.Гомори в 1957-1958 гг.
Отправной точкой для решения задачи (4.2)-(4.3) является решение ее непрерывного аналога, т. е. КЗЛП без учета условий целочисленности. Если получаемый в результате оптимальный план х
*
содержит только целые компоненты, то мы автоматически получаем и соответствующее решение ЦЗЛП. В противном случае к системе ограничений задачи должно быть добавлено такое ограничение, для которого:
- найденный нецелочисленный оптимальный план х
* не удовлетворяет вновь добавляемому ограничению;
- любой допустимый целочисленный план непрерывной задачи (4.2)-(4.3) удовлетворяет вновь добавляемому ограничению.
Такое ограничение называют правильным отсечением.
В первой геометрической интерпретации правильному отсечению соответствует гиперплоскость, отсекающая от выпуклого многогранного множества допустимых плановD
некоторый многогранник, не содержащий целочисленных планов.
Добавив сформированное отсекающее ограничение к уже существующим, мы получаем новую оптимизационную задачу, после чего вычислительный процесс итеративно повторяется.
Теперь необходимо несколько более подробно остановиться на принципах формирования отсекающих ограничений. Воспользуемся системой обозначений, применявшихся при изложении вычислительных методов линейного программирования. Пусть β(q
)
— оптимальный базис, полученный на последней итерации решения нецелочисленной ЗЛП. Если обозначить через αi,j
и άi
коэффициенты матрицы задачи и вектора ограничений в текущем базисе (A
(β(q
)
) и b
(β(q
)
))

то i
-ое уравнение в системе ограничений задачи примет вид:

Так как план x
(β(q
)
) является базисным, то в каждом уравнении все коэффициенты αi,j
, соответствующие базисным столбцам (j
∊N
(β(q
)
)), равны нулю за исключением некоторого αi,ji
=1, на основе чего из (4.18) получаем:

Если представить каждый коэффициент αi,j
в виде суммы целой и дробной частей αi,j
=[αi,j
]+{αi,j
}, то получим

или

Из (4.21) следует, что если все х
j
,j
∊1: n
являются целыми, то целым будет и выражение
стоящее в левой части(4.21), и, стало быть, правая часть данного уравнения:
также должна быть целой. Предположим, что

тогда, в силу того, что 0 ≤ {άi
} < 1, а {αi,j
} ≥ 0, xj
≥ 0, должно выполняться неравенство

Однако неравенства (4.22) и (4.23) противоречат требуемой целочисленности правой части (4.21)xj
(β(q
)
). Следовательно, для целочисленных решений должно выполняться условие, противоположное неравенству (4.22), или, что то же самое,

В то же время (4.24) не выполняется для любого нецелочисленного базисного
плана х
. Действительно, небазисные компоненты плана равны нулю: х
j
=0 , j
∊N
(β(q
)
), и (4.24) приобретает вид {άi
} ≤0 <=> {άi
}=0, но это противоречит предположению о нецелочисленности плана х
, т. к. в базисном плане х
i
= άi
. Все сказанное позволяет утверждать, что ограничение (4.24) задает правильное отсечение.
Таким образом, с точки зрения организации техники, вычислений для осуществления правильного отсечения мы должны к системе ограничений нецелочисленной линейной задачи, решаемой на q
-й итерации, добавить условие

гдеxn
+1
≥0 — фиктивная переменная, добавляемая для преобразования неравенства в строгое равенство. Ей соответствует нулевой коэффициент в целевой функции.
Данному преобразованию условий задачи будет соответствовать преобразование симплекс-таблицы, показанное на рис. 4.2.
На нем по соображениям обеспечения наглядности использованы обозначения (4.17) и предполагается, что текущий базис β(q
)
состоит из первых m
столбцов.
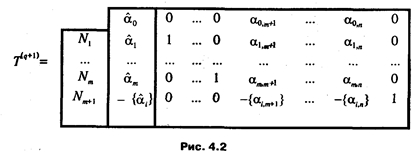
Индексi
соответствует выбранной для формирования отсечения строке симплекс-таблицы, содержащей нецелочисленное значение bi
(β(q
)
).
Как видно из рис. 4.2
, технически преобразование таблицы сводится к дописыванию одной строки и одного столбца. При этом легко убедиться, что модифицированные столбцы
совместно с добавленным столбцом
образуют сопряженный (двойственно допустимый) базис для сформированной задачи, а (ά1
, ..., άm
,-{άi
}) являются ненулевыми компонентами соответствующего псевдоплана. Исходя из этого, приходим к тому, что для решения вновь полученной задачи может быть эффективно применена процедура двойственного симплекс-метода
(см. параграф 1.7).
Поскольку в начальном псевдоплане имеется только одна отрицательная компонента (-{άi
}), то из базиса должен быть выведен соответствующий ей вектор а
n
+1
. Далее, следуя рекомендациям алгоритма двойственного симплекс-метода, находим оптимальный план. Если он не является целочисленным, то описанные действия итеративно повторяются.
Если в ходе решения дополнительная переменная х
n
+1
вновь становится базисной, ее значение оказывается безразличным для основных переменных. Поэтому строку и столбец, отвечающие ей, вычеркивают. С геометрической точки зрения это можно обосновать так: если псевдоплан оказывается внутри полупространства х
n
+1
≥0, то дополнительное ограничение, определяемое гиперплоскостью х
n
+1
=0, становится несущественным и опускается.
4.2.2. Описание алгоритма.
Приведем обобщенную схему алгоритма Гомори. Структурно он делится на так называемые большие итерации. Каждая большая итерация содержит этапы:
1. Решение «текущей» задачи методами линейного программирования (малые итерации). На первой итерации в качестве «текущей» задачи выступает нецелочисленный аналог исходной ЦЗЛП.
2. Определение первой нецелочисленной компоненты в оптимальном плане, полученном на этапе 1. Если все компоненты являются целочисленными, то алгоритм завершается.
3. Построение для найденной компоненты условия отсечения согласно правилу (4.24), добавление сформированного ограничения к системе ограничений текущей задачи, т. е. формирование новой текущей задачи. Переход на начало следующей большой итерации.
Двойственный симплекс-метод является основой для метода Гомори, так как он позволяет учитывать новые дополнительные ограничения (правильные отсечения) и переходить от текущего псевдоплана к новому оптимальному плану.
Можно доказать, что приведенный алгоритм конечен. Это означает, что на некотором шаге (итерации) будет найден целочисленный оптимальный план или обнаружен факт отсутствия допустимых целочисленных планов.
В качестве существенного замечания по поводу метода Гомори следует добавить, что при его практической реализации на ЭВМ следует считаться с ошибками округления, т, к. в условиях машинной арифметики практически ни один план не будет целочисленным. Кроме того, накапливающиеся погрешности могут внести возмущения в алгоритм и «увести» от оптимального целочисленного плана.
4.2.3. Пример решения ЦЗЛП методом Гомори.
Рассмотрим особенности применения метода Гомори на конкретном примере. Пусть дана задача со следующими условиями:
Итерация 1.
Используя обычный симплекс-алгоритм, решаем непрерывный аналог исходной задачи, в котором игнорируются условия целочисленности (4.28). В качестве исходного базиса можно взять первый и второй столбцы. На его основе заполняется таблица T
(1,1)
(первый индекс в обозначении таблицы соответствует «большой» итерации, а второй — «малой»).
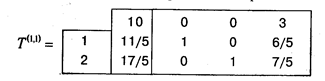
Как видно из строки оценок, данный базис является оптимальным, однако соответствующий ему план х
={11/5,17/5, 0)не является целочисленным, поэтому выбираем из таблицы T
(1,1)
строку, содержащую первый нецелый элемент, и согласно формуле (4.25) строим отсекающее ограничение:

после чего переходим к следующей «большой» итерации.
Итерация 2.
С учетом сформированного отсекающего ограничения заполняем симплекс-таблицу T
(2,1)
.
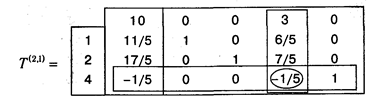
В соответствии с алгоритмом двойственного симплекс-метода переходим к следующему базису N
(β(2,2)
)={1, 2, 3}.
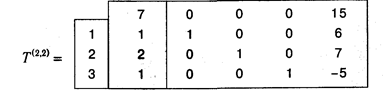
План, достигнутый в таблицеT
(2,2)
, является не только оптимальным (b
(β(2,2)
)>0), но и полностью состоит из целочисленных компонент, т. е. решение задачи найдено: х
*=(1, 2,1) и f(x)=
7.
4.3. МЕТОД ВЕТВЕЙ И ГРАНИЦ
4.3.1. Общая схема метода «ветвей и границ».
Другим широко применяемым для решения задач дискретного программирования методом является метод ветвей и границ
. Впервые данный метод для решения ЦЗЛП предложили в 1960 г. Лэнг иДойг, а его «второе рождение» произошло в 1963г. в связи с выходом работы Литтла, Мурти, Суини и Кэрел, посвященной решению задачи о коммивояжере [33].
Вообще говоря, термин «метод ветвей и границ» является собирательным и включает в себе целое семейство методов, применяемых для решения как линейных, так и нелинейных дискретных задач, объединяемое общими принципами. Кратко изложим их.
Пусть стоит задача:

гдеD
— конечное множество.
Алгоритм является итеративным, и на каждой итерации происходит работа с некоторым подмножеством множества D
. Назовем это подмножество текущим
и будем обозначать его как D
(q
)
, гдеq
— индекс итерации. Перед началом первой итерации в качестве текущего множества выбирается все множество D
(D
(1)
=D
),и для него некоторым способом вычисляется значение верхней оценки для целевой функции maxf(x)
≤ ξ( D
(1)
). Стандартная итерация алгоритма состоит из следующих этапов:
1°. Если можно указать планx
(q
)
∊D
(q
)
, для которого f(x
(q
)
)
≤ξ( D
(q
)
), то x
(q
)
=х*
— решение задачи (4.29).
2°. Если такой план не найден, то область определенияD
(q
)
некоторым образом разбивается на подмножества D
1
(q
)
,D
2
(q
)
, ..., Dlq
(q
)
, удовлетворяющие условиям:
Для каждого подмножества находятся оценки сверху (верхние границы) для целевой функции ξD
1
(q
)
,ξD
2
(q
)
, ..., ξDl
1
(q
)
, уточняющие ранее полученную оценку ξD
(q
)
, то есть ξDi
(q
)
≤ ξD
(q
)
, i
∊1:lq
. Возможно одно из двух:
2.1. Если существует такой план х
(q
)
, что
то этот план оптимальный.
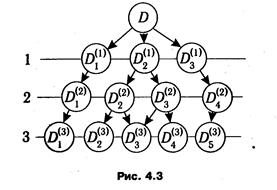
2.2. Если такой план не найден, то выбирается одно из множеств Di
(q
)
,i
∊1:lq
(как правило, имеющее наибольшую оценку

Все имеющиеся к текущему моменту концевые подмножества, т. е. те подмножества, которые еще не подверглись процессу дробления, переобозначаются какD
1
(q
+1)
,D
2
(q
+1)
,...,Dl
(q
+1)
(q
+1)
,после чего процесс повторяется.
Схема дробления множества D
представлена на рис. 4.3
в виде графа. Существуют и более сложные системы индексации подмножеств, при которых не требуется их переобозначение на каждом шаге.
Конкретные реализации метода ветвей и границ связаны с правилами разбиения на подмножества (правилами ветвления) и построения оценок значений целевых функций на данных подмножествах (границ).
4.3.2. Решение ЦЗЛП методом ветвей и границ.
Рассмотрим применение алгоритма метода ветвей и границ для решения ЦЗЛП (4.2)-(4.3). Как уже упоминалось, черезD
(q
)
обозначается подмножество множества допустимых планов задачи. Перед началом первой итерации (q
= 1) в качестве текущего множества берется все множество D
(D
(1)
= D
), после чего решается стандартная задача линейного программирования (D
(1)
, f
). Нетрудно заметить, что она является непрерывным аналогом
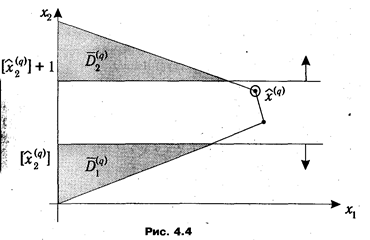
исходной задачи (4.2)-(4.3). Если найденный оптимальный план  (1)
содержит только целочисленные компоненты, то он является и оптимальным планом для (4.2)-(4.3):
(1)
=x
*
. В противном случае значениеf
(
(1)
) становится оценкой (верхней границей) значения целевой функции на множестве D
(1)
, и мы переходим к выполнению стандартной итерации алгоритма. Опишем входящие в нее этапы.
(1)
содержит только целочисленные компоненты, то он является и оптимальным планом для (4.2)-(4.3):
(1)
=x
*
. В противном случае значениеf
(
(1)
) становится оценкой (верхней границей) значения целевой функции на множестве D
(1)
, и мы переходим к выполнению стандартной итерации алгоритма. Опишем входящие в нее этапы.
1) Выбирается некоторая нецелочисленная компонента плана k
(q
)
. Поскольку в оптимальном плане она должна быть целой, то можно наложить ограничения xk
≤[k
(q
)
] и xk
≥[k
(q
)
]+1. Таким образом,D
(q
)
разбивается на подмножества
Графическая интерпретация такого разбиения множестваD
(q
)
приведена на рис. 4.4.
2) Решаются задачи линейного программирования
Соответствующие максимальные значения целевой функции принимаются как ее оценки на этих множествах:

Если оптимальный план
для одной из решенных задач удовлетворяет условию

и содержит только целые компоненты, то, значит, найдено решение основной задачи (4.2)-(4.3). В противном случае среди всех концевых подмножеств
, полученных как на предыдущих (Di
(q
)
), так и на текущем (D
1
(q
)
, D
2
(q
)
) этапе, выбирается область с наибольшей оценкой ξ(Di
(q
)
). Она становится текущим рассматриваемым подмножеством (D
(q
+1)
). Далее производится перенумерация концевых множеств и вычислительный процесс итеративно повторяется.
При решении задач (D
1
(q
)
, f
) и (D
2
(q
)
, f
) можно воспользоваться результатами решения предыдущей задачи (D
(q
)
,f
). Рассмотрим вариант организации вычислительного процесса на примере задачи ( 1
(q
)
, f
) (для (
2
(q
)
, f
) он выглядит аналогично с точностью до знаков неравенств).
1
(q
)
, f
) (для (
2
(q
)
, f
) он выглядит аналогично с точностью до знаков неравенств).
Предположим, что на последнем шаге решения задачи (D
(q
)
, f
) был получен оптимальный базис β. Без ограничения общности можно считать, что он состоит из первых m
столбцов матрицы задачи. Данное предположение делается исключительно для обеспечения наглядности дальнейшего изложения и очевидно, что его выполнения можно всегда добиться за счет простой перенумерации векторов а
j
. По аналогии с предыдущим параграфом введем обозначения для элементов матрицы задачи (D
(q
)
, f
) и ее вектора ограничений относительно базиса  : :

Тогда система ограничений задачи (D
(q
)
, f
) может быть представлена как
а получаемая на ее основе система ограничений задачи (
1
(q
)
, f
) как
или
где х
n
+1
≥ 0 — фиктивная переменная, которой соответствует нулевой коэффициент в целевой функции, добавляемая для преобразования неравенства в строгое равенство.
Очевидно, что 1≤k≤m
, т. к. небазисные компоненты оптимального плана (m
+1≤j≤n
) равны нулю, т. е. являются заведомо целочисленными. Тогда с учетом сделанных предположений о виде базиса можно записать:
Как видно из (4.39), в k
-м столбце имеется всего два отличных от нуля элемента: в k
-й и (m
+1)-й строках. Если вычесть из (m
+1)-го уравненияk
-e, то, учитывая, что [άk
] – άk
=-{άk
}, получим эквивалентную систему:
Проведенные преобразования системы ограниченийD
1
(q
)
позволили явно выделить сопряженный базис, образуемый столбцами с номерами 1,..., m
, n
+1, и соответствующий ему псевдоплан (ά1
, ..., άm
, 0,....,0, -{άk
}), т.е. для решения задачи (D
1
(q
)
, f
) может быть применен алгоритм двойственного симплекс-метода. Практически вычислительный процесс для данного этапа сводится к преобразованию к симплекс-таблицы, показанному на рис. 4.5.
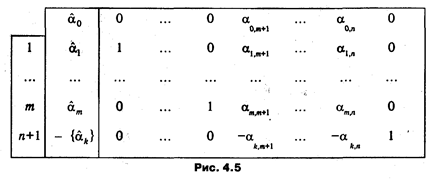
Для случая задачи (D
2
(q
)
, f
) преобразование симплекс-таблицы, получаемое на базе аналогичных рассуждений, приведено на рис. 4.6.
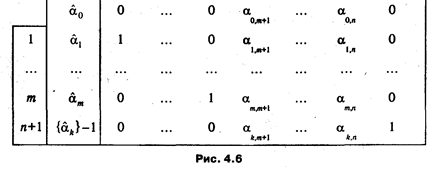
Очевидным недостатком алгоритма метода ветвей и границ при решении задач большой размерности является необходимость перебрать слишком большое количество вариантов перед тем, как будет найден оптимальный план. Однако он отчасти может быть преодолен, если ограничиться поиском не оптимального, а просто «хорошего» (близкого к оптимальному) плана. О степени такой близости и скорости приближения к экстремуму нетрудно судить по изменению значений оценок.
Подчеркнем, что приведенная реализация метода ветвей и границ является одной из многих
. Помимо нее, например, очень популярна версия метода решения задачи коммивояжера, в которой для ветвления и построения оценок используют специфические свойства данной модели. При желании о ней можно прочесть в[1, 14].
КЛЮЧЕВЫЕ ПОНЯТИЯ
- Задачи с неделимостями.
- Экстремальные комбинаторные задачи.
- Задачи с разрывными целевыми функциями.
- Правильное отсечение.
- Метод Гомори.
- Методы ветвей и границ.
КОНТРОЛЬНЫЕ ВОПРОСЫ
4.1. Какие основные проблемы возникают при решении дискретных задач?
4.2. Сформулируйте задачу о ранце.
4.3. Какие экономико-математические модели могут быть сведены к задаче о коммивояжере?
4.4. Приведите пример моделей с разрывными целевыми функциями.
4.5. Какой принцип используется для построения правильного отсечения в методе Гомори?
4.6. Перечислите основные этапы, входящие в «большую» итерацию метода Гомори.
4.7. Какую роль играет алгоритм двойственного симплекс-метода при решении целочисленной
линейной задачи методом Гомори?
4.8. Перечислите принципиальные идеи, лежащие в основе методов ветвей и границ.
4.9. Как производится построение отсечения при решении целочисленной линейной задачи методом
ветвей и границ?
4.10. Опишите схему решения целочисленной задачи линейного программирования методом ветвей и
границ.
4.11. За счет каких преобразований удается построить сопряженный базис при добавлении
отсекающего ограничения?
ГЛАВА 5. ДИНАМИЧЕСКОЕ
ПРОГРАММИРОВАНИЕ
5.1. ОБЩАЯ СХЕМА МЕТОДОВ
ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
5.1.1. Основные идеи вычислительного метода динамического программирования.
Некоторые задачи математического программирования обладают специфическими особенностями, которые позволяют свести их решение к рассмотрению некоторого множества более простых «подзадач». В результате вопрос о глобальной оптимизации некоторой функции сводится к поэтапной оптимизации некоторых промежуточных целевых функций. В динамическом программировании
*
рассматриваются методы, позволяющие путем поэтапной (многошаговой) оптимизации получить общий (результирующий) оптимум.
* Динамическое программирование как научное направление возникло и сформировалось в 1951-1953 гг. благодаря работам Р. Беллмана и его сотрудников.
Обычно методами динамического программирования оптимизируют работу некоторых управляемых систем
, эффект которой оценивается аддитивной
, или мультипликативной
, целевой функцией. Аддитивной
называется такая функция нескольких переменных f
(х
1
,x
2
,...,х
n
), значение которой вычисляется как сумма некоторых функцийfj
, зависящих только от одной переменной х
j
:

Слагаемые аддитивной целевой функции соответствуют эффекту решений, принимаемых на отдельных этапах управляемого процесса. По аналогии, мультипликативная
функция распадается на произведение положительных функций различных переменных:

Поскольку логарифм функции типа (5.2) является аддитивной функцией, достаточно ограничиться рассмотрением функций вида (5.1).
Изложим сущность вычислительного метода динамического программирования
на примере задачи оптимизации

при ограниченияx

Отметим, что в отличие от задач, рассмотренных в предыдущих главах, о линейности и дифференцируемости функций fj
(xj
) не делается никаких предположений, поэтому применение классических методов оптимизации (например, метода Лагранжа) для решения задачи (5.3)-(5.4) либо проблематично, либо просто невозможно.
Содержательно задача (5.3)-(5.4) может быть интерпретирована как проблема оптимального вложения некоторых ресурсов j
, приводимых к единой размерности (например, денег) с помощью коэффициентов aj
, в различные активы (инвестиционные проекты, предприятия и т. п.), характеризующиеся функциями прибылиfj
, т. е. такого распределения ограниченного объема ресурса (b
), которое максимизирует суммарную прибыль. Представим ситуацию, когда она решается последовательно для каждого актива. Если на первом шаге принято решение о вложении в n
-й актив xn
единиц, то на остальных шагах мы сможем распределить b-an
xn
единиц ресурса. Абстрагируясь от соображений, на основе которых принималось решение на первом шаге (допустим, мы по каким-либо причинам не могли на него повлиять), будет вполне естественным поступить так, чтобы на оставшихся
шагах
распределение
текущего
объема ресурса произошло оптимально
, что равнозначно решению задачи

при ограничениях

Очевидно, что максимальное значение (5.5) зависит от размера распределяемого остатка, и если оставшееся количество ресурса обозначить через ξ, то величину (5.5) можно выразить как функцию от ξ:

где индекс п
-1 указывает на оставшееся количество шагов. Тогда суммарный доход, получаемый как следствие решения, принятого на первом шаге, и оптимальных решений, принятых на остальных шагах, будет

Если бы имелась возможность влиять наxn
, то мы для получения максимальной прибыли должны были бы максимизировать Ωn
по переменной xn
, т. е. найти Λn
(b
) и фактически решить задачу:

В результате мы получаем выражение для значения целевой функции задачи при оптимальном поэтапном процессе принятия решений о распределении ресурса. Оно в силу построения данного процесса равно глобальному оптимуму целевой функции

т. е. значению целевой функции при одномоментном распределении ресурса.
Если в выражении (5.9) заменить значения b
на ξ, и п
наk
, то его можно рассматривать как рекуррентную формулу
, позволяющую последовательно вычислять оптимальные значения целевой функции при распределении объема ресурса ξ за k
шагов:

Значение переменной xk
, при котором достигается рассматриваемый максимум, обозначим k
(ξ).
При k
= 1 формула (5.11) принимает вид

т. е. допускает непосредственное вычисление функций Λ1
(ξ) и
1
(ξ).
Воспользовавшись (5.12) как базой рекурсии, можно с помощью (5.11) последовательно вычислить Λk
(ξ) и k
(ξ),k
∊2:n
. Положив на последнем шаге ξ =b
, в силу (5.9), найдем глобальный максимум функции (5.3), равный Λn
(b
), и компоненту оптимального плана х
n
*
= n
(b
). Полученная компонента позволяет вычислить нераспределенный остаток на следующем шаге приоптимальном планировании: ξ= b
–а
n
х*
n
, и, в свою очередь, найти х
*n-
1
=n-
1
(ξn-
1
). В результате подобных вычислений последовательно будут найдены все компоненты оптимального плана.
Таким образом, динамическое программирование представляет собой целенаправленный перебор вариантов, который приводит к нахождению глобального максимума. Уравнение (5.11), выражающее оптимальное решение наk
-м шаге через решения, принятые на предыдущих шагах, называется основным рекуррентным соотношением динамического программирования
. В то же время следует заметить, что описанная схема решения при столь общей постановке задачи имеет чисто теоретическое значение, так как замыкает вычислительный процесс на построение функций Λk
(ξ) (k
∊1:n
), т. е. сводит исходную задачу (5.3)—(5.4) к другой весьма сложной проблеме. Однако при определенных условиях применение рекуррентных соотношений может оказаться весьма плодотворным. В первую очередь это относится к задачам, которые допускают табличное задание функций Λk
(ξ).
5.1.2. Задачи динамического программирования, допускающие табличное задание рекуррентных соотношений.
Рассмотрим процесс решения модифицированного варианта задачи (5.3)-(5.4), в котором переменные х
j
и параметры aj
, b
могут принимать только целочисленные значения, а ограничение (5.4) имеет вид равенства. В рамках предложенной в п. 5.1.1 интерпретации о вложении средств в активы данные предпосылки вполне реалистичны и, более того, могут быть даже усилены требованием о кратности значений х
j
, например, 1000 единицам.
Чтобы не усложнять обозначения, условимся операции целочисленной арифметики записывать стандартным образом, полагая, что промежуточные результаты подвергаются правильному округлению. Так, например, будем считать, что 12/5=2.
В соответствии с общей схемой вычислительного алгоритма на первом шаге мы должны построить функцию
Поскольку ξ≤b
,x
1
принимает конечное число целых значений от 0 до b
/a
1
. Это позволяет, например, путем перебора значений f
1
(x
1
) найти функцию Λ1
(ξ) и задать ее в форме таблицы следующей структуры (табл. 5.1).
Последняя колонка табл. 5.1 (
1
(ξ)) содержит значениеx
1
, на котором достигается оптимальное решение первого шага. Его необходимо запоминать для того, чтобы к последнему шагу иметь значения всех компонент оптимального плана.
На следующем (втором) шаге можно приступить к вычислению функции Λ2
(ξ), значения которой для каждого отдельно взятого ξ∊ 0: b
находятся как

где значения

берутся из табл. 5.1. В результате вычислений формируется таблица значенийΛ2
(ξ), содержащая на одну колонку больше по сравнению с табл. 5.1, так как теперь необходимо запомнить оптимальные решения первого (
1
(ξ)) и второго шагов (
2
(ξ)).

На последующих шагах с номеромk
(k
∊2:(n-l)) осуществляются аналогичные действия, результатом которых становятся таблицы значений Λk
(ξ), где ξ ∊{0, 1,..., b
} (см. табл. 5.2).
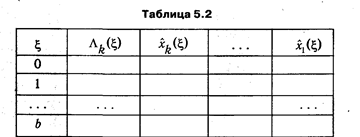
На последнем n
-ом шаге нет необходимости табулировать функцию Λn
(ξ), так как достаточно определить лишь Λn
(b
)=f
(n
(b
)). Одновременно определяется и оптимальное значение n
-й компоненты оптимального плана x*n
=n
(b
). Далее, используя таблицу, сформированную на предыдущем шаге, определяем оптимальные значения остальных переменных:

и т. д. или, в общем виде,

Подчеркнем одно из преимуществ описанного метода с точки зрения его практической реализации в рамках программного обеспечения для ЭВМ: на каждом шаге алгоритма непосредственно используется только таблица, полученная на предыдущем шаге, т. е. нет необходимости сохранять ранее полученные таблицы. Последнее позволяет существенно экономить ресурсы компьютера.
Выигрыш, который дает применение рассмотренного алгоритма, может также быть оценен с помощью следующего простого примера. Сравним приблизительно по числу операций (состоящих, в основном, из вычислений целевой функции) описанный метод с прямым перебором допустимых планов задачи (5.3)-(5.4) при а
1
=a
2
= ...а
n
=1.
Количество допустимых планов такой задачи совпадает с количеством целочисленных решений уравнения

т. е. равно числу сочетаний с повторениями из n
элементов по b
. Следовательно, при простом переборе число возможных вариантов составит
В случае применения метода динамического программирования для вычисления таблицы значений функции Λk
(ξ) при фиксированном ξ необходимо выполнить (ξ+1) операций. Поэтому для заполнения одной таблицы необходимо проделать

операций, из чего получаем, что для вычисления всех функции потребуется потребуется

операций, что при больших n
и b
существенно меньше, чем в первом случае. Например, если п
= 6 и b
= 30, то непосредственный перебор потребует выполнения 324 632 операций, а метод динамического программирования — только 2511.
5.1.3. Принцип оптимальности Беллмана.
Еще раз подчеркнем, что смысл подхода, реализуемого в динамическом программировании, заключен в замене решения исходной многомерной задачи последовательностью задач меньшей размерности.
Перечислим основные требования к задачам, выполнение которых позволяет применить данный подход:
- объектом исследования должна служить управляемая система
(объект) с заданными допустимыми состояниями
и допустимыми управлениями
;
- задача должна позволять интерпретацию как многошаговый процесс, каждый шаг которого состоит из принятия решения
о выборе одного из допустимых управлений, приводящих к изменению состояния
системы;
- задача не должна зависеть от количества шагов и быть определенной на каждом из них;
- состояние системы на каждом шаге должно описываться одинаковым (по составу) набором параметров;
- последующее состояние, в котором оказывается система после выбора решения на k
-м. шаге, зависит только от данного решения и исходного состояния к началу k
-го шага. Данное свойство является основным с точки зрения идеологии динамического программирования и называется отсутствием последействия.
Рассмотрим вопросы применения модели динамического программирования в обобщенном виде. Пусть стоит задача управления некоторым абстрактным объектом
, который может пребывать в различных состояниях
. Текущее состояние объекта отождествляется с некоторым набором параметров, обозначаемым в дальнейшем ξ и именуемый вектором состояния
. Предполагается, что задано множество Ξ всех возможных состояний. Для объекта определено также множество допустимых управлений
(управляющих воздействий) X
, которое, не умаляя общности, можно считать числовым множеством. Управляющие воздействия могут осуществляться в дискретные моменты времениk
(k
∊1:n
), причем управленческое решение
заключается в выборе одного из управлений xk
∊Х
. Планом
задачи или стратегией управления
называется вектор х
=(х
1
, х
2
, .., xn
-1
), компонентами которого служат управления, выбранные на каждом шаге процесса. Ввиду предполагаемого отсутствия последействия
между каждыми двумя последовательными состояниями объекта ξk
и ξk
+1
существует известная функциональная зависимость, включающая также выбранное управление:ξk
+1
= φk
(xk
, ξk
),k
∊1:п
-1. Тем самым задание начального состояния объекта ξ1
∊Ξ и выбор плана х
однозначно определяют траекторию поведения
объекта, как это показано на рис. 5.
1.
Эффективность управления на каждом шаге k
зависит от текущего состояния ξk
, выбранного управления xk
и количественно оценивается с помощью функций fk
(х
k
, ξk
), являющихся слагаемыми аддитивной целевой функции
, характеризующей общую эффективность управления объектом. (Отметим, что в определение функции fk
(х
k
, ξk
) включается область допустимых значений х
k
, и эта область, как правило, зависит от текущего состояния ξk
.) Оптимальное управление
, при заданном начальном состоянии ξ1
, сводится к выбору такого оптимального плана х
*
, при котором достигается максимум суммы
значений fk
на соответствующей траектории.
Основной принцип динамического программирования заключается в том, что на каждом шаге следует стремиться не к изолированной оптимизации функции fk
(х
k
, ξk
), а выбирать
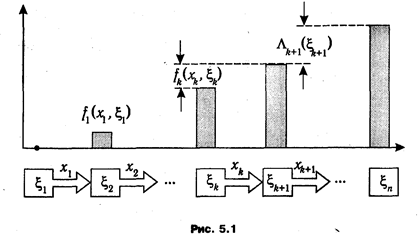
оптимальное управление х
k
*
в предположении об оптимальности всех последующих шагов. Формально указанный принцип реализуется путем отыскания на каждом шагеk
условных оптимальных управлений
k
(ξ), ξ∊Ξ, обеспечивающих наибольшую суммарную эффективность начиная с этого шага, в предположении, что текущим является состояние ξ.
Обозначим Λk
(ξ) максимальное значение суммы функций fk
на протяжении шагов от k
до п
(получаемое при оптимальном управлении на данном отрезке процесса), при условии, что объект в начале шага k
находится в состоянии ξ . Тогда функции Λk
(ξ) должны удовлетворять рекуррентному соотношению:

где ξk
+1
= φk
(xk
, ξ)
Соотношение (5.14) называют основным рекуррентным соотношением
динамического программирования. Оно реализует базовый принцип динамического программирования, известный также как принцип оптимальности Беллмана
:
- Оптимальная стратегия управления должна удовлетворять следующему условию: каково бы ни было
начальное состояние
ξk
на k-м шаге и выбранное на этом шаге управление х
k
,, последующие управления (управленческие решения) должны быть оптимальными по отношению к состоянию
ξk
+1
= φk
(xk
, ξk
), получающемуся в результате решения, принятого на шаге k.
Основное соотношение (5.14) позволяет найти функции Λk
(ξ) только в сочетании с начальным условием
, каковым в нашем случае является равенство
Сравнение рекуррентной формулы (5.14) с аналогичными соотношениями в рассмотренных выше примерах указывает на их внешнее различие. Это различие обусловлено тем, что в задаче распределения ресурсов фиксированным является конечное состояние управляемого процесса. Поэтому принцип Беллмана применяется не к последующим, а к начальным этапам управления, и начальное соотношение имеет вид

Важно еще раз подчеркнуть, что сформулированный выше принцип оптимальности применим только для управления объектами, у которых выбор оптимального управления не зависит от предыстории управляемого процесса, т. е. от того, каким путем система пришла в текущее состояние. Именно это обстоятельство позволяет осуществить декомпозицию задачи и сделать возможным ее практическое решение.
В то же время, говоря о динамическом программировании как о методе решения оптимизационных задач, необходимо отметить и его слабые стороны. Так, в предложенной схеме решения задачи (5.3)-(5.4) существенным образом используется тот факт, что система ограничений содержит только одно неравенство, и, как следствие, ее состояние задается одним числом — нераспределенным ресурсом ξ . При наличии нескольких ограничений состояние управляемого объекта на каждом шаге характеризуется уже набором параметров ξ1
, ξ2
,..., ξm
, и табулировать значения функций Λk
(ξ1
, ξ2
,..., ξm
) необходимо для многократно большего количества точек. Последнее обстоятельство делает применение метода динамического программирования явно нерациональным или даже просто невозможным. Данную проблему его основоположник Р. Беллман эффектно назвал «проклятием многомерности». В настоящее время разработаны определенные пути преодоления указанных трудностей. Подробную информацию о них можно найти в специальной литературе [4, 5].
5.2. ПРИМЕРЫ ЗАДАЧ ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
5.2.1. Задача о найме работников.
Приступим к рассмотрению вопросов применения методов динамического программирования в конкретных экономико-математических моделях.Отдельно отметим, что данные вычислительные схемы, вообще говоря, достаточно часто используются для решения некоторых задач, которые уже были затронуты в других главах. Это, прежде всего, задача о ранце, задача о кратчайшем пути, задачи транспортного типа.
Одним из важнейших классов задач, для которых применение динамического программирования оказывается плодотворным, являются задачи последовательного принятия решений. Их особенностью является то, что искомые переменные х
1
,x
2
, ..,х
k
,... должны определяться в строгой временной последовательности и не должны меняться местами. В качестве примера опишем так называемую задачу о найме работников
(задачу об использовании рабочей силы).
В данной задаче рассматривается некоторый экономический объект (фирма, магазин, завод и т. п.), функционирующий в течение конечного числа периодов, обозначаемых номерамиk
(k
∊ l:n
). Каждый периодk
характеризуется нормативной потребностью в определенном количестве однотипных работников mk
. Тот же объем работ может быть выполнен другим количеством сотрудников ξk
, что, однако, влечет дополнительные затраты либо за счет нерационального использования рабочей силы, либо ввиду повышения оплаты за интенсивный труд. Размеры этих дополнительных издержек описываются функциямиgk
(ξk
- mk
), где (ξk
- mk
) — отклонение фактической численности работающих ξk
, от планово необходимой mk
, причемgk
(0)=0. Управленческое решение на шаге k
заключается в выборе величины изменения
числа сотрудников х
k
∊Z
, что однозначно определяет количество работающих в течение следующего периода: ξk
+1
=ξk
+х
k
. Затраты по изменению количества работников (найму и увольнению) при переходе от периода k
к периоду (k
+1) задаются функцией uk
(х
k
) , где также uk
(0)=0. Тогда суммарные издержки, вызванные принятым на шаге k
решением, характеризуются значением функции

План задачи (стратегия управления) х
= (x
1
, ..., х
n
-1
, 0) заключается в выборе поэтапных изменений количества работников, а его суммарная эффективность описывается аддитивной функцией

На основе сформулированной модели ставится задача минимизации целевой функции (издержек) (5.15). Добавим, что постановка задачи не будет корректной, если не задать начальное условие
на количество работников. Существуют две модификации данной задачи, определяемые типом начального условия:в первом случае задается исходное значение на первом этапеm
1
, а во втором — требуемое количество в n
-м периоде mn
.
Рассмотрим первый случай. Поскольку фиксированным является начальное количество работников и, напротив, ничего не известно о том, каким это количество должно быть на последнем этапе, то рассмотрение процесса принятия решений удобнее начать с конца. Оптимальное управление на последнем этапе п
по условию равно х
*n
=n
(ξ)=0, поэтому минимальные издержки полностью определяются количеством работников в последнем периоде:

Для остальных предшествующих шагов основное рекуррентное соотношение примет вид

где Λk
(ξ) — минимальные затраты с k
-го по п
-й периоды, в предположении, что количество работников в k
-й период равно ξ. Точки
л
(ξ), в которых достигаются минимумы (5.17), определяют условное оптимальное управление на каждом шаге.
Последовательно определяя
л
(ξ) и дойдя до этапа 1, мы сможем найти безусловное оптимальное управление x
1
* из того условия, что на начало первого периода численность работников должна составлятьξ1
* = m
1
, a именно

Остальные компоненты оптимального плана х
k
*
и состояния ξk
*
, образующие оптимальную траекторию, последовательно находятся по рекуррентным формулам

после чего не составляет труда вычислить оптимальное значение целевой функции (5.15).
Остановимся теперь на втором случае
, когда задано финальное состояние управляемого объекта, т. е. желаемое количество работников на последнем периодеξn
*
=mn
. Очевидно, что в данной ситуации следует поступить с точностью «до наоборот» и рассмотреть процесс принятия решений от начала к концу. Наилучшее условное управление на первом шаге
1
(ξ) будет найдено в процессе вычисления функции

где состояниеξ ≥0 является возможным количеством работников на начальном шаге. Соответственно, основное рекуррентное соотношение выразит минимальные издержки вплоть до k
-го периода через таковые для предыдущих периодов (с первого по (k
-1)-й) при условии, что численность работников в k
-й период будет равна ξ:

Попутно будут найдены функцииk
(ξ), k
∊2:n
, определяющие условные оптимальные управления. На последнем периоде, в силу начального условия,ξn
*
= mn
. Отсюда путем последовательного решения рекуррентных уравнений могут быть найдены оптимальные численности работниковξ*k
и безусловные оптимальные управления:

В заключение, как и в первом случае, подсчитывается минимальная величина издержек.
Обобщая изложенные схемы решения, можно прийти к выводу:
При использовании алгоритмов динамического программирования, если задано начальное состояние управляемой системы, то задача решается в
обратном направлении
, а если конечное, тo
—в прямом.
Наконец, если заданы как начальное, так и конечное состояния, то задача существенно усложняется.
(В качестве компромисса в этом случае можно отказаться от оптимизации на первом или последнем этапе.)
Продемонстрируем процесс решения задачи о найме работников на конкретном примере:
Для функционирования некоторого предприятия в течение четырех месяцев (нумеруемых от 1 до 4) по нормам требуются следующие количества работников одинаковой квалификации:

причем перед началом первого месяца (в нулевом месяце) фактически имеетсяξ0
=2 сотрудников. Администрация планирует в конце каждого месяцаk
(кроме последнего) корректировать число работающих на величину xk
, k
∊0:4, х
4
=0. На прием одного сотрудника необходимо затратить 9 у.е., а на увольнение — 6 у. е. Предполагается, что расходы на содержание избыточного работника составляют 8 у. е., а в случае нехватки персонала приходится нести затраты в размере 12 у. е. за каждое вакантное место.
Требуется найти оптимальные значения приращений численности работающих в конце каждого из первых трех месяцев, при которых суммарные издержки за весь рассматриваемый период будут минимальными.
В начале решения запишем в аналитической форме функции издержек на прием-увольнение сотрудников (и
), а также насодержание ненормативного штата (g
). С этой целью введем функции
Оценки эффективности управления на каждом шаге имеют вид:

Поскольку в поставленной задаче задано начальное условие ξ*0
=2, ее решение начинается с конца, и, следовательно, будут применяться рекуррентные соотношения (5.17). С технической точки зрения будет удобно на каждом шаге составлять две таблицы значений: функции издержек, получаемых начиная с текущего шага в зависимости от текущего состояния и управления,

и функции минимальных издержек в зависимости от текущего состояния

Для сокращения объема табулируемых значений можно воспользоваться свойством выпуклости функции Ωk
(xk
, ξ), вытекающим из выпуклости f
и g
. Из выпуклости функции Ωk
(xk
, ξ)следует, что заполнять таблицу ее значений необходимо лишь до тех пор, пока они уменьшаются, т. е. можно остановиться, как только очередное значение оказывается больше предыдущего. Отметим, что подобные приемы очень широко используются в динамическом программировании. Разумеется, иллюстрируемые методы не рассчитаны на ручной счет, поскольку связаны с очень большим объемом рутинных вычислений. Радикраткости ниже приведены только фрагменты таблиц, содержащие интересующие нас значения.
Итерация 1.
Полагаемk
=4. На данном этапе функция состояния Λ4
(ξ) может быть найдена непосредственно, если учесть, что x
4
*=0 и u
(0)=0:

Таблица значений данной функции и условные оптимальные управления имеют вид
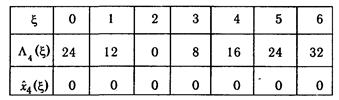
Итерация
2. Полагаемk
=3. Предварительно заполним таблицу значений функции Ω3
(x
3
, ξ)для достаточно большого множества аргументов согласно формуле:
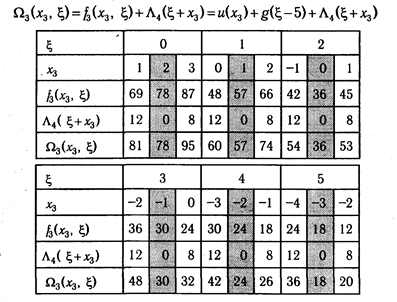
Выбирая минимальные по х
3
значения Ω3
(x
3
, ξ)составим таблицу Λ3
(ξ) и соответствующие значения условных оптимальных управлений
3
(ξ):
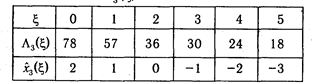
Итерация 3
. Полагаемk
=2. Так же, как на предыдущей итерации, заполним таблицу значений функции Ω2
(x
2
, ξ)согласно формуле:
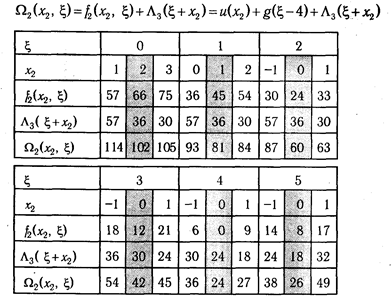
Выбирая минимальные по х
2
значения Ω2
(x
2
, ξ), составим таблицу Λ1
(ξ) и соответствующие значения условных оптимальных управлений
2
(ξ):
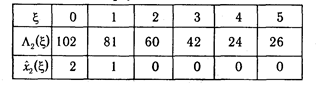
Итерация 4.
Полагаемk
=1. Аналогично предыдущему, заполним таблицу значений функцииΩ1
(x
1
, ξ)согласно формуле:
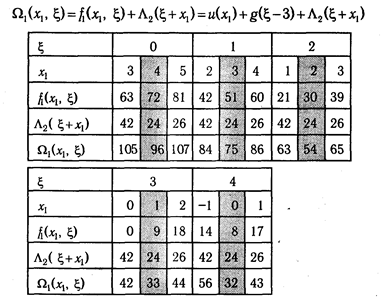
Выбирая минимальные по х
1
, значенияΩ1
(x
1
, ξ), составим таблицу Λ1
(ξ) и соответствующие значения условных оптимальных управлений
1
(ξ):
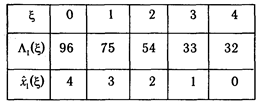
Итерация 5.
На последней итерации, в связи с наличием начального условия ξ*0
= 2, достаточно вычислить

и найти
0
(2) как точку минимума Ω0
(x
0
, 2). Простые вычисления показывают, что минимум

достигается при x
0
(2) = 1.
Следовательно, x*
0
=
0
(2)=1, после чего обратным ходом последовательно вычисляются оптимальные управления и оптимальные состояния (оптимальная траектория):
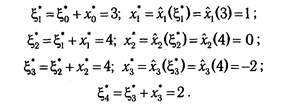
Итак, результаты расчета свидетельствуют, что при заданной системе расценок в третьем месяце выгоднее не брать 5-го работника, а компенсировать его отсутствие дополнительными выплатами за сверхурочную работу имеющимся сотрудникам.
5.2.2. Динамические задачи управления запасами.
Одной из наиболее известных сфер приложения методов динамического программирования является такая область математической экономики, как теория управления запасами.
Ее предметом является разработка и исследование математических моделей систем, занимающих промежуточное положение между источниками (производителями) тех или иных ресурсов и их потребителями. При математической формализации процессов управления запасами очень часто приходится использовать скачкообразные, недифференцируемые и кусочно-непрерывные функции. Как правило, это обусловливается необходимостью учета эффектов концентрации, фиксированных затрат и платы за заказ. В связи с этим получаемые задачи с трудом поддаются аналитическому решению классическими методами, однако могут быть успешно решены с помощью аппарата динамического программирования. Рассмотрим достаточно типичную задачу, возникающую в процессе планирования деятельности системы снабжения, — так называемую динамическую задачу управления запасами.
Пусть имеется некоторая система снабжения (склад, оптовая база и т. п.), планирующая свою работу на п
периодов. Ее деятельность сводится к обеспечению спроса конечных потребителей на некоторый продукт, для чего она осуществляет заказы производителю данного продукта. Спрос клиентов (конечных потребителей) в данной модели рассматривается как некоторая интегрированная величина, принимающая заданные значения для каждого из периодов, и он должен всегда удовлетворяться (т. е. не допускаются задолженности и отказы). Также предполагается, что заказ, посылаемый производителю, удовлетворяется им полностью, и временем между заказом и его выполнением можно пренебречь (т. е. рассматривается система с мгновенным выполнением заказа). Введем обозначения:
yk
— остаток запаса после (k
-1)-го периода;
dk
— заранее известный суммарный спрос в k
-м периоде;
х
k
— заказ (поставка от производителя) в k
-м периоде;
с
k
(х
k
) —затраты на выполнение заказа объема xk
в k
-м периоде;
sk
(ξk
) — затраты на хранение запаса объема ξk
вk
-м периоде.
После получения поставки и удовлетворения спроса объем товара, подлежащего хранению в периодk
, составит ξk
= yk
+ х
k
- dk
. Учитывая смысл параметра yk
, можно записать соотношение:

Расходы на получение и хранение товара в период k
описываются функцией

Планом задачи можно считать вектор х
= (х
1
, х
2
, ..., х
n
), компонентами которого являются последовательные заказы в течение рассматриваемого промежутка времени. Соотношение между запасами (5.24) в сочетании с некоторым начальным условием связывает состояния системы с выбранным планом и позволяет выразить суммарные расходы за все п
периодов функционирования управляемой системы снабжения в форме аддитивной целевой функции:

Естественной в рамках сформулированной модели представляется задача нахождения последовательности оптимальных управлений (заказов) x*k
и связанных с ними оптимальных состояний (запасов) ξ*k
, которые обращают в минимум (5.25). В качестве начального условия
используем требование о сохранении после завершения управления заданного количества товара
yn
+1
, а именно

При решении поставленной задачи методом динамического программирования в качестве функции состояния управляемой системы Λk
(ξ) логично взять минимальный объем затрат, возникающих за первыеk
периодов при условии, что вk
-й период имеется запас ξ . Тогда можно записать основное рекуррентное соотношение

поскольку

Система рекуррентных соотношений (5.27)-(5.28) позволяет найти последовательность функций состояния Λ1
(ξ), Λ2
(ξ), …, Λn
(ξ) и условных оптимальных управлений
1
(ξ),
2
(ξ),…, n
(ξ). На n
-м шаге с помощью начального условия (5.26) можно определить х
*n
= n
(yn
+1
). Остальные значения оптимальных управлений x*k
определяются по формуле:

Особый интерес представляет частный случай задачи (5.24)-(5.25), при котором предполагается, что функции затрат на пополнение запаса с
k
(х
k
) являются вогнутыми по х
k
, а функции затрат на хранениеsk
(ξk
) являются линейными относительно объема хранимого запаса, т. е.sk
(ξk
) = sk
ξk
. Параллельно заметим, что обе предпосылки являются достаточно реалистичными.
Обозначим функцию затрат в течениеk
-ro периода через

или, что то же самое,

В силу сделанных предположений все функции затрат fk
(xk
,yk
+1
) являются вогнутыми (как суммы вогнутой и линейной функций). Данное свойство значительно упрощает процесс решения, так как для поиска минимума вогнутых функций fk
(xk
,yk
+1
) достаточно рассмотреть только две крайние точки множества, на котором отыскивается минимум. С учетом введенного обозначения задачу (5.24)-(5.25) можно записать в виде:

при условиях

Рассмотрим процедуру решения (5.32)-(5.33). Так как ищется минимум суммы вогнутых функций fk
(xk
,yk
+1
), то решение будет достигаться на одной из крайних точек множества, определяемого условиями (5.33). Общее число переменных xk
и yk
в системе (5.33) равно 2п
. Однако, учитывая то, что в ней только п
уравнений, в оптимальном плане будет не более п
ненулевых компонент, причем для каждого периода k
значения xk
и yk
не могут равняться нулю одновременно (в силу необходимостиудовлетворения спроса либо за счет заказа, либо за счет запаса). Формально это утверждение можно представить в виде условия дополняющей нежесткости:

где

С точки зрения содержательной интерпретации условия (5.34)-(5.35) означают, что при оптимальном управлении
заказ поставщику на новую партию не должен поступать, если в начале периода имеется ненулевой запас, или размер заказа должен равняться величине спроса за целое число периодов
. Отсюда следует, что запас на конец последнего периода должен равняться нулю: у*
n
+1
=0. Последнее позволяет решать задачу в прямом направлении, применяя рекуррентное соотношение

где ξ = у
k
+1
=
х
k
+
у
k
-
dk
.
Учитывая (5.34)-(5.35) и вогнутость fk
(xk
, ξ), заключаем, что минимум (5.36) достигается в одной из крайних точек xk
=0 или xk
= ξ + dk
поэтому

тогда для предыдущего периода функция состояния может быть выражена как

на oснове чего в общем виде получаем модифицированную форму для рекуррентного соотношения

При дальнейших конкретизирующих предположениях о виде функций fk
(xk
, у
k
+1
) можно получить еще более компактные формы для рекуррентных соотношений. Однако эти вопросы носят достаточно частный характер, и мы их рассматривать не будем. Отметим лишь, что приведенные в данном пункте преобразования неплохо иллюстрируют общие подходы, применяемые в динамическом программировании, а также те свойства задач, которые открывают возможности, для эффективного и плодотворного использования соответствующих методов.
КЛЮЧЕВЫЕ ПОНЯТИЯ
- Аддитивная и мультипликативная функция.
- Рекуррентное соотношения.
- Принцип оптимальности Беллмана.
- Отсутствие последействия.
- Задача о найме работников.
- Динамическая задача управления запасами.
КОНТРОЛЬНЫЕ ВОПРОСЫ
5.1. Для решения каких задач предназначен метод динамического программирования?
5.2. В чем заключена суть метода динамического программирования?
5.3. Каким условиям должна удовлетворять задача, чтобы для ее решения мог быть применен
алгоритм динамического программирования?
5.4. Какие трудности связаны с вычислительными алгоритмами динамического программирования?
5.5. Что определяет направление решения задачи в алгоритмах динамического программирования?
5.6. Сформулируйте математическую модель для задачи о найме работников.
5.7. Выпишите основное рекуррентное соотношение, используемое при решении задачи о найме
работников.
5.8. С какими особенностями задач управления запасами связано применение при их решении
аппарата динамического программирования?
5.9. Какой вид имеет целевая функция в динамической задачеуправления запасами?
5.10. Выпишите основное рекуррентное соотношение, используемое при решении динамической
задачи управления запасами.
ГЛАВА 6. КРАТКИЙ ОБЗОР
ДРУГИХ РАЗДЕЛОВ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
Данная глава занимает особое положение среди остальных. Ее цель — представить читателю предельно краткую характеристику так называемых дополнительных разделов исследования операций. Поясним несколько смысл слова «дополнительный». Дело в том, что существуют различные подходы к классификации этих научных отраслей: иногда их считают составными частями исследования операций, а иногда рассматривают как самостоятельные дисциплины. Обе точки зрения имеют право на существование, но даже если придерживаться второй, разделы, о которых пойдет речь в настоящей главе, можно трактовать как смежные области знания, аппарат которых применим для решения задач исследования операций. Еще раз подчеркнем, что каждый параграф настоящей главы лишь обзорно затрагивает общие вопросы соответствующих тем, а полные учебные курсы по ним существенно превышают объем данной книги.
6.1. ТЕОРИЯ ИГР
6.1.1. Предмет теории игры.
Задачи, рассмотренные в предыдущих главах, формулировались для ситуаций индивидуального выбора оптимальных решений, т.е. для случаев, когда решение принимает отдельно взятый субъект, обладающий единственнойцелью.
Принципиально иная ситуация возникает при изучении процессов принятия решений несколькими субъектами, интересы которых могут не совпадать. При этом возникают задачисо многими целевыми функциями (критериями). Область математики, изучающая данные проблемы, получила название теории игр
. Задачи теории игр относятся к области принятия решений в условиях неопределенности, а их специфика состоит в том, что, как правило, подразумевается неопределенность, возникающая в результате действий двух или более «разумных» противников, способных оптимизировать свое поведение за счет других. Среди типичных примеров такого поведения могут быть названы действия конкурирующих фирм на одном рынке или планирование военных операций.
Одним из основных вопросов в задачах с коллективным выбором решений является вопрос об определении оптимальности
, т. е. вопрос, какие решения следует признавать наилучшими в ситуации оптимизации по нескольким критериям, отражающим различные интересы. Многие методы решения проблем теории игр основываются на сведении их к задачам математического программирования. На наиболее простых из них мы остановимся в настоящей главе.
Теория игр берет начало от работ Э. Бореля (1921 г.), а принципиальным этапом в ее становлении как самостоятельного научного направления стала монография Дж. Неймана, вышедшая в 1944 г. [25].
6.1.2. Терминология и классификация игр.
Особенностью теории игр как научной дисциплины стала употребляемая в ней специфическая терминология. Термин «игра
» применяется для обозначения совокупности правил и соглашений, которыми руководствуются субъекты, поведение которых мы изучаем. Каждый такой субъект k
, гдеk
∊l:K
, или игрок
, характеризуется наличием индивидуальной системы целевых установок и стратегий
s
1
k
,s
2
k
, ..., smk
k
, т. е. возможных вариантов действий в игре.
Достаточно распространенный способ математического описания игры основан на задании функцийfk
(s
1
i
1
,s
2
i
2
, ..., sk
ik
, ..., sK
ik
), каждая из которых определяет результат (платеж, выигрыш), получаемый k
-м игроком в зависимости от набора стратегийS
=(s
1
i
1
,s
2
i
2
, ..., sk
ik
, ..., sK
ik
), примененного всеми участниками игры. Функцииfk
, k
∊l:K
также называют функциями
выигрыша
, или платежными функциями
. В том случае, если для любыхS
игра называется игрой с нулевой суммой
. Игру с двумя участниками и нулевой суммой называют антагонистической
. Антагонистические игры, т. е. игры, в которых выигрыш одного участника равен проигрышу другого, в силу относительно простой постановки задачи являются наиболее изученным разделом теории игр. Однако содержание теории игр, безусловно, не исчерпывается ими. В классификации игровых моделей выделяют игры с конечными и бесконечными наборами стратегий у игроков, выделяют игры по возможным количествам ходов у участников. Также игры делят на некооперативные
и кооперативные
, т. е. те, в которых функции выигрыша участников зависят от образуемых ими коалиций. Помимо этого игры можно различать по объему информации, имеющейся у игроков относительно прошлых ходов. В этой связи они делятся на игры с полной и неполной информацией
. Заинтересованный читатель может обратиться к таким источникам, как [17, 23].
6.1.3. Матричные игры и понятие седловой точки.
Рассмотрим более подробно антагонистические игры и их основные свойства. Удобным способом задания игры двух участников с нулевой суммой является платежная матрица
. Отсюда, кстати, происходит еще одно их название — матричные игры
. Каждый элемент платежной матрицы а
ij
содержит числовое значение выигрыша игрока
I (проигрыша игрока II), если первый применяет стратегию i
, а второй — стратегию j
. Термины выигрыш
и проигрыш
следует понимать в широком смысле, т. к. они могут принимать отрицательные значения и с житейской точки зрения означать противоположное. Нетривиальность задачи прежде всего заключается в том, что каждый из игроков делает свой выбор, не зная о выборе другого, что существенно осложняет процесс оптимизации выбираемой стратегии.
Классическим примером антагонистической игры является игра с двумя участниками, загадывающими независимо друг отдруга числа. Предполагается, что если их сумма оказывается четной, то выигрыш, равный 1, достается первому игроку, а если нечетной, то второму. Положив, что для обоих игроков загадывание нечетного числа является первой стратегией, а четного — второй, можем записать платежную матрицу данной игры:
Строки матрицы (6.1) соответствуют стратегиям игрока I, столбцы — стратегиям игрока II, а ее элементы — результатам первого игрока. Также из определения игры следует, что элементы данной матрицы, взятые с обратным знаком, соответствуют выигрышам второго игрока.
Более сложная и содержательная платежная матрица может быть получена, если несколько модифицировать предложенную игру. Допустим, что оба участника имеют право загадывать числа от 1 до 4, что составляет их соответствующие стратегии. В случае, если результат сложения задуманных чисел будет четным, то второй игрок выплачивает первому получившуюся сумму, а если нечетным, то первый — второму. Запишем платежную матрицу для такой игры:
Некоторая условность и искусственность в постановке проблемы не должны в данном случае нас смущать, так как к подобной форме может быть сведена модель, описывающая, например, соревнование двух фирм за вновь открывшийся рынок сбыта продукции и т. п.
Как уже отмечалось, важнейшим в теории игр является вопрос об оптимальности решения (выбора стратегии) для каждого из игроков. Проанализируем с этой точки зрения некоторую матричную игру, для которой задана платежная матрица А
=║aij
║m
xn
. При выборе игроком I стратегииi
его гарантированный доход независимо от действий игрока II составит min ai,j
. Поскольку он может выбирать i
самостоятельно, то целесообразно этот выбор сделать таким, чтобы он при любой стратегии противника максимизировал величину гарантированного дохода, т. е. обеспечивал получение max (min ai,j
). Такой принцип выбора стратегии получил название «принцип максимина
». С другой стороны, аналогичные рассуждения могут быть проведены по поводу действий второго игрока. Его наибольший проигрыш при выборе стратегии j
составит maxai,j
, и, следовательно, ему следует выбирать стратегию так, чтобы минимизировать величину проигрыша при любых действиях соперника, т. е. обеспечить min (max ai,j
). в этом суть принципа минимакса.
Можно доказать справедливость следующего соотношения:

Однако очевидный интерес представляет ситуация, при которой значение выигрыша (платежа), получаемого игроком I при выборе им максиминной стратегии, равно платежу (проигрышу) II-го игрока при минимаксной стратегии

В этом случае говорят, что игра имеет седловую точку
. Совпадение значений гарантированных выигрышей игроков при максиминной и минимаксной стратегии означает возможность достижения в игре некоторого оптимального (стабильного, равновесного) состояния, от которого невыгодно отклоняться ни одному из участников. Понятие «оптимальность» здесь означает, что ни один разумный (осторожный) игрок не стремится изменить свою стратегию, так как его противник, в принципе, сможет выбрать такую стратегию, которая даст худший для первого результат. Стратегии i*
и j
*, образующие седловую точку, называются оптимальными
, а значениеv
= ai*j*
называют ценой игры
. Тройка (i*
, j*
, v
) считается решением матричной игры с седловой точкой.
Нетрудно заметить, что не всякая игра обладает седловой точкой. В частности, как игра (6.1), так и игра (6.2) седловой точки не имеют. Примером игры, имеющей седловую точку, является игра с платежной матрицей (6.5).
В данной матрице минимальные (гарантированные) выигрыши первого игрока по строкам равны 1, 5 и (-3). Следовательно, его максиминному выбору будет отвечать стратегия 2, гарантирующая выигрыш 5. Для второго игрока максимальные проигрыши по столбцам матрицы составят 8, 10, 5, 17, поэтому имеет смысл остановиться на стратегии 3, при которой он проиграет только 5. Таким образом, вторая стратегия первого игрока и третья стратегия второго образуют седловую точку со значением 5, т. е. для игры с матрицей (6.5) имеет решение (2; 3; 5).
6.1.4. Смешанные стратегии.
Дальнейшее развитие теории матричных игр основывается на исследовании игры как некоторого повторяющегося процесса. Действительно, вряд ли можно дать содержательные рекомендации по такому вопросу, как следует поступать участникам однократно проводимой игры, не имеющей седловой точки. В случае же ее многократных повторов естественной и плодотворной представляется идея рандомизации
выбора стратегий игроками, т. е. внесение в процесс выбора элемента случайности. Действительно, систематическое отклонение, например, игрока I от максиминной стратегии с целью увеличения выигрыша может быть зафиксировано вторым игроком и наказано. В то же время абсолютно хаотичный выбор стратегий не принесет в среднем наилучшего результата.
- Смешанной стратегией
игрока I в игре с матрицей
A
=║ai,j
║m
xn
называется упорядоченный набор действительных чисел
xi
,
i
∊1:m
, удовлетворяющих условиям

Числа интерпретируются как вероятности применения игроком I стратегий 1, 2,..., m
, которые, в отличие от смешанных, также называют чистыми стратегиями.
Аналогично вводится понятие смешанных стратегий игрока II, которые определяются как набор чисел у
j
, j
∊1:n
, удовлетворяющих условиям

Тогда, если игрок I применяет смешанную стратегию х
=(х
1
, х
2
,..., х
m
) а игрок II смешанную стратегию y
=(y
1
, y
2
,..., yn
), то математическое ожидание выигрыша игрока I (проигрыша игрока II) определяется соотношением
 * *
* Напомним, что при многократном повторении игры средний выигрыш близок к математическому ожиданию.
В дальнейшем через Х
будем обозначать множество допустимых смешанных стратегий игрока I, определяемое условием 6.7, а черезY
— определяемое условием 6.8 множество допустимых смешанных стратегий игрока II.
К поиску решения игры в смешанных стратегиях, так же как и в п. 6.1.3, могут быть применены критерии максимина-минимакса. В соответствии с ними игрок I будет выбирать свою смешанную стратегию х
=(х
1
, х
2
,..., х
m
) таким образом, чтобы максимизировать наименьший средний выигрыш:

который, как можно доказать, равен

а игрок II — свою смешанную стратегию так, чтобы минимизировать наибольший средний проигрыш:

также равный

По аналогии с (6.3) для любых х
∊Х
иy
∊Y
справедливо неравенство

-Стратегии х
*
∊Х
иy*
∊Y
называют
оптимальными смешанными стратегиями
, если для любых
х
∊Х
иy
∊Y
справедливо равенство

v =F
(x*
,
у
*
) называют ценой игры, и если х
*
и у
*
существуют, то говорят, что игра имеет решение в смешанных стратегиях
(х
*
, у*,
v
).
Справедлива фундаментальная теорема Дж. Неймана, которую мы приведем без доказательства.
| Теорема 6.1
(основная теорема матричных игр). Любая матричная игра имеет решение в смешанных стратегиях.
|
Значение и нетривиальность теоремы (6.1) обусловлены прежде всего тем, что, как было показано в п. 6.1.3, в общем случае матричные игры в чистых стратегиях решения не имеют.
6.1.5. Решение матричных игр методами линейного программирования.
Рассмотрим некоторые способы решения матричных игр. Задача, решаемая первым игроком, (6.10) была сформулирована как максимизация наименьшей из сумм

но если определить некоторое х
m
+1
, для которого выполняется

то она может быть сведена к задаче линейного программирования:

при ограничениях

Проведя аналогичные рассуждения, приходим к тому, что задача минимизации наибольшего ожидаемого проигрыша, решаемая игроком II (6.12), сводится к задаче линейного программирования
Таким образом, мы получаем возможность применять все возможности аппарата линейного программирования для поиска оптимальных стратегий обоих игроков.
Достаточно легко проверить, что задачи (6.16)-(6.17) и(6.18)-(6.19) образуют двойственную пару. Здесь в определенном смысле мы вернулись к проблемам, уже рассматривавшимся во второй главе, а именно к взаимосвязи между наличием решения у некоторой оптимизационной задачи и существованием седловой точки у соответствующей функции Лагранжа. В данном случае аналогичная связь прослеживается между седловой точкой игры и решением пары задач оптимизации.
6.1.6. Графические методы решения игр.
Следует отметить, что применение для решения задач (6.16)-(6.17), (6.18)-(6.19) стандартных алгоритмов линейного программирования далеко не всегда является рациональным. Помимо этого существуют иные методы, которые основываются на использовании специфики данных задач. В настоящем пункте мы остановимся на очень простом классическом способе поиска оптимальных смешанных стратегий в матричных играх, где один из участников имеет только две стратегии (это так называемые 2 х п
ит
х 2 игры).
Для определенности положим, что игрок I имеет возможность выбирать между двумя стратегиями с вероятностями x
1
и x
2
= 1-x
1
, тогда его ожидаемые выигрыши, соответствующие чистым стратегиям игрока II, примут вид

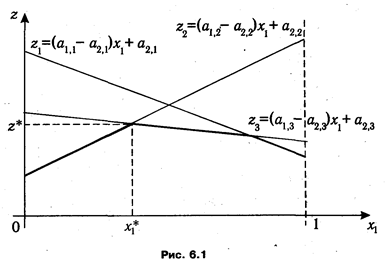
или

т. е. ожидаемые выигрыши могут быть представлены в виде графиков линейных функций, зависящих от переменной x
1
∊ [0; 1] (рис. 6.1
, где предполагается, что игрок II имеет три стратегии).
Линии, изображенные на рис.
6.1
, задают зависимости среднего выигрыша игрока I от значения вероятности x
1
, с которой он выбирает свою первую стратегию, для случаев, когда его противник выбирает первую, вторую или третью чистую стратегию. Тогда значениям минимального гарантированного дохода первого игрока соответствует нижняя огибающая всех трех прямых. Согласно принципу максимина, оптимальному выбору игрока I будет соответствовать наивысшая точка, лежащая на данной огибающей, отмеченная на рисунке как (x
1
*,z*
). Зная ее, можно определить оптимальную смешанную стратегию первого игрока х
* = (x
1
*, 1-x
2
*) и цену игры, равнуюz*
.
Исходя из отношения двойственности, которым, как было установлено в п. 6.1.5, связаны задачи обоих игроков, по оптимальной стратегии первого участника х
* однозначно определяетсяоптимальная стратегия его противника у*
. Поскольку у*
является результатом решения задачи линейного программирования, то он обладает всеми свойствами допустимого базисного плана, т. е. в случае 2 х п
игры имеет не более чем две ненулевых компоненты и не менее чем (п
-2) нулевых. Номера ненулевых элементов у*
определяются номерами линий, пересечение которых определило оптимальную стратегию первого игрока. Действительно, игрок II знает оптимальную стратегию соперника, и применение им стратегий, соответствующих прямым, проходящим выше точки (х
1
*,z
*), только увеличило бы его проигрыш.
В рассматриваемом примере это линии z
2
и z
3
, и, следовательно, в своей оптимальной стратегии второй игрок должен с ненулевыми вероятностями применять вторую и третью чистые стратегии (у
2
>0, у
3
>0). На основе этого, а также учитывая условие нормировки

можем выразить: y
3
=l – y
2
тогда оптимальное значение y
2
* может быть найдено из условия

или

В результате получаем оптимальную стратегию игрока II у
*=
(0, у
2
*, у
3
*).
Очевидно, что поиск решения в игре т
х 2 осуществляетсяаналогичным образом с точностью до наоборот: строятся графики ожидаемого проигрыша игрока II, находится их верхняя огибающая и т. д.
Безусловно, графический способ в силу ограниченности круга задач, к которым он может быть применен, имеет скорее теоретическое, чем практическое значение. Однако он хорошо иллюстрирует содержательную сторону процесса поиска решения в игре.
6.2. ТЕОРИЯ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
6.2.1. Постановка и классификация задач теории оптимального управления.
В подавляющем большинстве рассмотренных нами задач факторы, связанные с изменением изучаемых объектов и систем в течение времени, выносились за скобки. Возможно, при выполнении определенных предпосылок такой подход является конструктивным и правомерным. Однако очевидно и то, что это допустимо далеко не всегда. Существует обширный класс задач, в которых необходимо найти оптимальные действия объекта, учитывающие динамику его состояний во времени и пространстве. Методы их решения составляют предмет математической теории оптимального управления.
В весьма общем виде задача оптимального управления может быть сформулирована следующим образом:
Имеется некоторый объект, состояние которого характеризуется двумя видами параметров — параметрами состояния и параметрами управления, причем в зависимости от выбора последних процесс управления объектом протекает тем или иным образом. Качество процесса управления оценивается с помощью некоторого функционала
*
, на основе чего ставится задача: найти такую последовательность значений управляющих параметров, для которой данный функционал принимает экстремальное значение.
*Функционалом
называется числовая функция, аргументами которой, как правило, служат другие функции.
С формальной точки зрения многие проблемы оптимального управления могут быть сведены к задачам линейного или нелинейного программирования большой размерности, так как каждой точке пространства состояний соответствует свой вектор неизвестных переменных. Все же, как правило, движение в данном направлении без учета специфики соответствующих задачне приводит к рациональным и эффективным алгоритмам их решения. Поэтому методы решения задач оптимального управления традиционно связаны с другим математическим аппаратом, берущим свое начало от вариационного исчисления и теории интегральных уравнений. Следует также заметить, что опять-таки в силу исторических причин теория оптимального управления была ориентирована на физические и технические приложения, и ее применение для решения экономических задач носит в определенном смысле вторичный характер. В то же время в целом ряде случаев модели исследования, применяющие аппарат теории оптимального управления, могут привести к содержательным и интересным результатам.
К сказанному выше необходимо добавить замечание о тесной связи, существующей между методами, применяемыми для решения задач оптимального управления, и динамическим программированием. В одних случаях они могут использоваться на альтернативной основе, а в других довольно удачно дополнять друг друга.
Существуют различные подходы к классификации задач оптимального управления. Прежде всего, их можно классифицировать в зависимости от объекта управления:
- задачи управления с
сосредоточенными параметрами;
- задачи управления объектами с
распределенными параметрами.
Примером первых является управление самолетом как единым целым, а вторых — управление непрерывным технологическим процессом.
В зависимости от типа исходов, к которым приводят применяемые управления, выделяют детерминированные
и стохастические
задачи. В последнем случае результатом управления является множество исходов, описываемых вероятностями их наступления.
По характеру изменения управляемой системы во времени различают задачи:
- с дискретно изменяющимся временем
;
- с непрерывно изменяющимся временем
.
Аналогично классифицируются задачи управления объектами с дискретным или непрерывным множеством возможных состояний. Задачи управления системами, в которых время и состояния меняются дискретно, получили название задач управления конечными автоматами
. Наконец, при определенных условиях могут ставиться задачи управления смешанными системами.
Многие модели управляемых систем основаны на аппарате дифференциальных уравнений как в обыкновенных, так и в частных производных. При исследовании систем с распределенными параметрами, в зависимости от вида используемых дифференциальных уравнений в частных производных, выделяют такие типы задач оптимального управления, как параболические, эллиптические или гиперболические.
Рассмотрим два простейших примера задач управления экономическими объектами.
Задача распределения ресурсов.
Имеется т
складов с номерамиi
(i
∊1:m
), предназначенных для хранения однородного продукта. В дискретные моменты времениt
∊0:(T
-l) происходит его распределение между объектами-потребителями (клиентами) с номерами j
, j
∊1:n
. Пополнение запаса в пунктах хранения продукта в t
-й момент времени определяется величинамиai
t
, i
∊1:m
, а потребности клиентов в нем равняются bj
t
, j
∊1:n
. Обозначим черезct
i,j
— затраты на доставку единицы продукта из i
-го склада j
-му потребителю в момент времениt.
Также предполагается, что продукт, поступивший на склад в момент t
, может быть использован, начиная со следующего момента (t
+l). Для сформулированной модели ставится задача найти такой план распределения ресурсов {х
t
i,j
}T
m
xn
, который минимизирует суммарные расходы на доставку потребителям продукции со складов в течение полного периода функционирования системы.
Обозначив через х
t
i,j
количество продукта, поставляемое j
-му клиенту с i
-го склада в t
-й момент времени, а через zt
i
— общее количество продукта на i
-м складе, описанную выше проблему можно представить как задачу нахождения таких совокупностей переменных
которые обращают в минимум функцию

при условиях
где объемы начальных запасов продукта на складах z
0
i
=ži
. предполагаются заданными.
Задачу (6.20)-(6.23) называют динамической транспортной задачей линейного программирования
. С точки зрения приведенный выше терминологии независимые переменные х
t
i,j
представляют собой параметры управления
системой, а зависящие от них переменные zt
i
— совокупность параметров состояния
системы в каждый момент времениt.
Ограничения zt
i
≥ 0 гарантируют, что в любой момент времени с любого склада не может быть вывезен объем продукта, превышающий его фактическое количество, аограничения (6.21) задают правила изменения этого количества при переходе от одного периода к другому. Ограничения данного вида, которые задают условияна значения параметров состояния системы, принято называть фазовыми.
Отметим также, что условие (6.21) служит простейшим примером фазовых ограничений, поскольку связываются значения параметров состояния для двух смежных периодов t
иt
+l. В общем случае может устанавливаться зависимость для группы параметров, принадлежащих нескольким, возможно несмежным, этапам. Такая потребность может возникнуть, например, при учете в моделях фактора запаздывания поставок.
Простейшая динамическая модель макроэкономики.
Представим экономику некоторого региона как совокупность п
отраслей (j
∊1:п
), валовой продукт которых в денежном выражении на некоторый момент t
может быть представлен в виде вектора zt
=(zt
1
, zt
2
,..., zt
n
), где t
∊0:(Т
-1). Обозначим через At
матрицу прямых затрат, элементы которой at
i,j
, отражают затраты продукции i
-й отрасли (в денежном выражении) на изготовление единицы продукции j
-й отрасли в t
-й момент времени. Если Xt
= ║xt
i,j
║n
xm
— матрица, задающая удельные нормы продукции i
-й отрасли, идущей на расширение производства в j
-й отрасли, а у
t
=(у
t
1
, у
t
2
,..., у
t
n
) — вектор объемов продукции отраслей потребления, идущей на потребление, то условие расширенного воспроизводства можно записать как

где z
0
=ž
— исходный запас продукции отраслей предполагается заданным и

В рассматриваемой модели величиныzt
являются параметрами состояния системы, а X
t
— управляющими параметрами. На ее базе могут быть поставлены различные задачи, типичным представителем которых является задача оптимального вывода экономики на момент Т
к некоторому заданному состояниюz
*. Данная задача сводится к отысканию последовательности управляющих параметров

удовлетворяющих условиям (6.24)-(6.25) и минимизирующих функцию

6.2.2. Простейшая задача оптимального управления.
Один из приемов, применяемых для решения экстремальных задач, состоит в выделении некоторой проблемы, допускающей относительно несложное решение, к которой в дальнейшем могут быть сведены остальные задачи.
Рассмотрим так называемую простейшую задачу управления
. Она имеет вид
Специфика условий задачи (6.27)-(6.29) состоит в том, что функции качества управления (6.27) и ограничения (6.28) являются линейными относительно z
t
, в то же время функция g
(t
,х
t
), входящая в (6.28), может быть произвольной. Последнее свойство делает задачу нелинейной даже приt
=1, т. е. в статическом варианте.
Общая идея решения задачи (6.27)-(6.29) сводится к ее «расщеплению» на подзадачи для каждого отдельно взятого момента времени, в предположении, что они успешно разрешимы. Построим для задачи (6.27)-(6.29) функцию Лагранжа

где λt
—вектора множителей Лагранжа (t
∊0:Т
). Ограничения (6.29), носящие общий характер, в функцию (6.30) в данном случае не включены. Запишем ее в несколько иной форме
Необходимые условия экстремума функции Ф(х, z,
λ) по совокупности векторов z
t
задаются системой уравнений

которая называется системой для сопряженных переменных
. Как можно заметить, процесс нахождения параметров λt
в системе (6.32) осуществляется рекуррентным образом в обратном порядке.
Необходимые условия экстремума функции Лагранжа по переменным λt
будут эквивалентны ограничениям (6.28), и, наконец, условия ее экстремума по совокупности векторов х
t
∊Х
t
, t
∊1:(Т
-1) должны быть найдены как результат решения задачи

Таким образом, задача поиска оптимального управления сводится к поиску управлений, подозрительных на оптимальность, т. е. таких, для которых выполняется необходимое условие оптимальности. Это, свою очередь, сводится к нахождению таких  t
, t
, t
,
t
, t
, удовлетворяющих системе условий (6.28), (6.32), (6.33), которая называется дискретным принципом максимума Понтрягина. t
, удовлетворяющих системе условий (6.28), (6.32), (6.33), которая называется дискретным принципом максимума Понтрягина.
Справедлива теорема.
| Теорема 6.2.
Совокупность векторов
t
,
t
,t
, удовлетворяющих системе
(6.28), (6.32), (6.33), образует седловую точку функции
Ф(х,
z
,
λ) (6.30), т. е. при любых допустимых х, z,
λ выполняются неравенства
|

Доказательство.
Пустьt
,
t
,t
,удовлетворяют системе (6.28), (6.32), (6.33). Тогда из (6.31) и (6.32) следует, что

и поскольку
t
удовлетворяет (6.33), то

С другой стороны, в силу (6.28) из (6.30) следует, что при любом векторе t

Следовательно,

Применяя теорему (6.2), а также положения теории нелинейного программирования, касающиеся связи между решением экстремальной задачи и существованием седловой точки (см. п. 2.2.2), приходим к выводу о том, что векторыt
,
t
являются решением простейшей задачи оптимального управления(6.27)-(6.29).
В результате мы получили логически простую схему решения данной задачи: из соотношений (6.32) определяются сопряженные переменные t
, затем в ходе решения задачи (6.33) находятся управления
t
и далее из (6.28) — оптимальная траектория состоянийt
,.
Предложенный метод относится к фундаментальным результатам теории оптимального управления и, как уже это упоминалось выше, имеет важное значение для решения многих более сложных задач, которые, так или иначе, сводятся к простейшей. В то же время очевидны и пределы его эффективного использования, которые целиком зависят от возможности решения задачи (6.33).
КЛЮЧЕВЫЕ ПОНЯТИЯ
- Игра, игрок, стратегия.
- Игры с нулевой суммой.
- Матричные игры.
- Антагонистические игры.
- Принципы максимина и минимакcа.
- Седловая точка игры.
- Цена игры.
- Смешанная стратегия.
- Основная теорема матричных игр.
- Динамическая транспортная задача.
- Простейшая динамическая модель макроэкономики.
- Простейшая задача оптимального управления.
- Дискретный принцип максимума Понтрягина.
КОНТРОЛЬНЫЕ ВОПРОСЫ
6.1. Кратко сформулируйте предмет теории игр как научной дисциплины.
6.2. Какой смысл вкладывается в понятие «игра»?
6.3. Для описания каких экономических ситуаций может быть применен аппарат теории игр?
6.4. Какая игра называется антагонистической?
6.5. Чем однозначно определяются матричные игры?
6.6. В чем заключаются принципы максимина и минимакcа?
6.7. При каких условиях можно говорить о том, что игра имеет седловую точку?
6.8. Приведите примеры игр, которые имеют седловую точку и в которых она отсутствует.
6.9. Какие подходы существуют к определению оптимальных стратегий?
6.10. Что называют «ценой игры»?
6.11. Дайте определение понятию «смешанная стратегия».
СПИСОК ЛИТЕРАТУРЫ
1. Абрамов Л. М., Капустин В. Ф.
Математическое программирование. Л.,1981.
2. Ашманов С. А.
Линейное программирование: Учеб. пособие. М., 1981.
3. Ашманов С. А., Тихонов А. В.
Теория оптимизации в задачах и упражнениях. М., 1991.
4. Беллман Р.
Динамическое программирование. М., 1960.
5. Беллман Р., Дрейфус С.
Прикладные задачи динамического программирования. М., 1965.
6. Гавурин М. К., Малоземов В. Н.
Экстремальные задачи с линейными ограничениями. Л., 1984.
7. Гасс С.
Линейное программирование (методы и приложения). М., 1961.
8.Гейл
Д
. Теория линейных экономических моделей М., 1963.
9. Гилл Ф., Мюррей
У., Райт
М.
Практическая оптимизация / Пер. с англ. М., 1985.
10. Давыдов Э. Г.
Исследование операций: Учеб. пособие для студентов вузов. М., 1990.
11. Данциг Дж.
Линейное программирование, его обобщения и применения. М.,1966.
12. Еремин И. И., Астафьев Н. Н.
Введение в теорию линейного и выпуклого программирования. М., 1976.
13. Ермольев Ю.М., Ляшко И.И., Михалевич В.С., Тюптя В.И.
Математические методы исследования операций:Учеб. пособие для вузов. Киев, 1979.
14. Зайченко Ю. П.
Исследование операций, 2-е изд. Киев, 1979.
15. Зангвилл У. И.
Нелинейное программирование. Единый подход.М., 1973.
16. Зойтендейк Г.
Методы возможных направлений. М., 1963.
17. Карлин С.
Математические методы в теории игр, программировании и экономике. М., 1964.
18. Карманов В. Г.
Математическое программирование:Учеб. пособие. М., 1986.
19. Корбут
А.А., Финкелыитейн
Ю. Ю.
Дискретное программирование. М., 1968.
20. Кофман
А., Анри-Лабордер А.
Методы и модели исследования операций. М., 1977.
21. Кюнце Г.П., Крелле В.
Нелинейное программирование. М.,1965.
22. Ляшенко И.Н., Карагодова Е.А., Черникова Н.В., Шор Н.3.
Линейное и нелинейное программирование. Киев, 1975.
23. Мак-Кинси Дж.
Введение в теорию игр. М., 1960.
24. Мухачева Э. А., Рубинштейн Г. Ш.
Математическое программирование. Новосибирск, 1977.
25. Нейман Дж., Моргенштерн О.
Теория игр и экономическое поведение. М, 1970.
26. Оре О.
Теория графов. М., 1968.
27. Таха X.
Введение в исследование операций/ Пер. с англ.М.,1985.
28. Фиакко А., Мак-Кормик Г.
Нелинейное программирование. Методы последовательной безусловной минимизации. М.,1972.
29. Хедли Дж.
Нелинейное и динамическое программирование. М., 1967.
30. Юдин Д.Б., Гольштейн Е.Г.
Линейное программирование (теория, методы и приложения). М., 1969.
31. Юдин Д.Б., Гольштейн Е.Г.
Линейное программирование. Теория и конечные методы. М., 1963.
32.Lapin L.
Quantitative methods for business decisions with cases. Fourth edition. HBJ, 1988.
33.Liitle I.D.C., Murty K.G„ Sweeney D.W., Karel C.
An algorithm for traveling for the traveling salesman problem.— Operation Research, 1963, vol.11, No. 6, p. 972-989/ Русск. пер.: Литл Дж., Мурти К., Суини Д., Керел К.
Алгоритм для решения задачи о коммивояжере. — В кн.: Экономика и математические методы, 1965, т. 1, № 1, с. 94-107.
Содержание
ПРЕДИСЛОВИЕ......................................................................................................................................................................................................... 2
ВВЕДЕНИЕ................................................................................................................................................................................................................. 3
ГЛАВА 1. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ....................................................................................................................................... 8
1.1. ПОСТАНОВКА ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ.......................................................................................... 9
1.2. ОСНОВНЫЕ СВОЙСТВА ЗЛП И ЕЕ ПЕРВАЯ ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ........................................................ 11
1.3. БАЗИСНЫЕ РЕШЕНИЯ И ВТОРАЯ ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ ЗЛП.................................................................. 15
1.4. СИМПЛЕКС-МЕТОД..................................................................................................................................................................................... 17
1.5. МОДИФИЦИРОВАННЫЙ СИМПЛЕКС-МЕТОД.................................................................................................................................. 26
1.6. ТЕОРИЯ ДВОЙСТВЕННОСТИ В ЛИНЕЙНОМ ПРОГРАММИРОВАНИИ.................................................................................... 30
1.7. ДВОЙСТВЕННЫЙ СИМПЛЕКС-МЕТОД................................................................................................................................................ 37
КЛЮЧЕВЫЕ ПОНЯТИЯ....................................................................................................................................................................................... 42
КОНТРОЛЬНЫЕ ВОПРОСЫ................................................................................................................................................................................ 43
ГЛАВА 2. НЕЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ.............................................................................................................................. 44
2.1. МЕТОДЫ РЕШЕНИЯ ЗАДАЧ НЕЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ................................................................................... 44
2.2. ДВОЙСТВЕННОСТЬ В НЕЛИНЕЙНОМ ПРОГРАММИРОВАНИИ................................................................................................ 55
КЛЮЧЕВЫЕ ПОНЯТИЯ....................................................................................................................................................................................... 59
КОНТРОЛЬНЫЕ ВОПРОСЫ................................................................................................................................................................................ 59
ГЛАВА 3. ТРАНСПОРТНЫЕ И СЕТЕВЫЕ ЗАДАЧИ............................................................................................................................. 60
3.1. ТРАНСПОРТНАЯ ЗАДАЧА И МЕТОДЫ ЕЕ РЕШЕНИЯ..................................................................................................................... 60
3.2. СЕТЕВЫЕ ЗАДАЧИ........................................................................................................................................................................................ 66
КЛЮЧЕВЫЕ ПОНЯТИЯ....................................................................................................................................................................................... 73
КОНТРОЛЬНЫЕ ВОПРОСЫ................................................................................................................................................................................ 73
ГЛАВА 4. ДИСКРЕТНОЕ ПРОГРАММИРОВАНИЕ................................................................................................................................ 74
4.1. ТИПЫ ЗАДАЧ ДИСКРЕТНОГО ПРОГРАММИРОВАНИЯ.................................................................................................................. 74
4.2. МЕТОД ГОМОРИ............................................................................................................................................................................................ 78
4.3. МЕТОД ВЕТВЕЙ И ГРАНИЦ....................................................................................................................................................................... 81
КЛЮЧЕВЫЕ ПОНЯТИЯ....................................................................................................................................................................................... 86
КОНТРОЛЬНЫЕ ВОПРОСЫ................................................................................................................................................................................ 86
ГЛАВА 5. ДИНАМИЧЕСКОЕ ПРОГРАММИРОВАНИЕ........................................................................................................................ 86
5.1. ОБЩАЯ СХЕМА МЕТОДОВ ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ.............................................................................. 86
5.2. ПРИМЕРЫ ЗАДАЧ ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ................................................................................................. 93
КЛЮЧЕВЫЕ ПОНЯТИЯ..................................................................................................................................................................................... 101
КОНТРОЛЬНЫЕ ВОПРОСЫ............................................................................................................................................................................. 101
ГЛАВА 6. КРАТКИЙ ОБЗОР ДРУГИХ РАЗДЕЛОВ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ.............................................................. 101
6.1. ТЕОРИЯ ИГР................................................................................................................................................................................................... 101
6.2. ТЕОРИЯ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ........................................................................................................................................ 108
КЛЮЧЕВЫЕ ПОНЯТИЯ..................................................................................................................................................................................... 112
КОНТРОЛЬНЫЕ ВОПРОСЫ............................................................................................................................................................................. 112
СПИСОК ЛИТЕРАТУРЫ..................................................................................................................................................................................... 112
|
