Министерство образования и науки Украины
Национальный аэрокосмический университет им. Н.Е. Жуковского
«ХАИ»
Реферат
по СМПР на тему:
«Структуризация задач принятия решений в условиях определенности. Некорректно поставленные задачи. Регуляризирующие (робастные) алгоритмы: адаптивные, инвариантные»
Выполнил: ст. 440М гр.
Авраменко Екатерина
Проверил: Трончук
Алексей Адамович
Харьков 2008
Оглавление
Введение
1. Принятие решений в условиях определенности
1.1 Определение
1.2.Классификация
1.3 Определенность
1.4 Методы
2. Некорректно поставленные задачи
3. Регуляризирующие алгоритмы
4. Адаптивные регуляризирующие алгоритмы
Вывод
Список использованных источников
Введение
Людям приходится принимать решения почти везде и почти всегда. В ходе военных действий, в политике, при управлении предприятием, при выборе автомобиля или варианта обмена квартиры и еще в тысячах других случаев. Занимаются люди этим интересным, нередко захватывающим и часто небезопасным делом со времен фараонов и по сей день. Поэтому достоин удивления тот факт, что люди осознали то, КАК они принимают решения совсем недавно (по историческим меркам) - вскоре после Второй мировой войны. Оказалось, что схема процесса принятия решения не зависит от той области, в которой принимается решение. Иначе говоря, законы принятия решений едины для всех предметных областей. В них крайне нежелательны ошибки, которые могут привести к пагубным последствиям. Но из-за ограниченных информационных возможностей человека ошибки всегда возможны. Поэтому есть настоятельная необходимость применения научного подхода к обоснованию и принятию решений.
Принятие решений, наряду с прогнозированием, планированием, ситуационным анализом обстановки, исполнением решений, контролем и учетом является функцией управления. Все функции управления направлены так или иначе на формирование или реализацию решений, и любую функцию управления технологически можно представить в виде последовательности каких-либо связанных общей целью решений.
При прогнозировании и планировании принимаются решения, связанные с выбором методов и средств, организацией работы, оценкой достоверности информации, выбором наиболее достоверного варианта прогноза и наилучшего варианта плана. Таким образом, функция принятия решений является с методологической и технологической точек зрения более общей, чем другие функции управления. Для лица, принимающего решение (ЛПР), принятие решений является основной задачей, которую он обязан исполнять в процессе управления. Поэтому знание методов, технологий и средств решений этой задачи является необходимым элементом квалификации руководителя, базой для дальнейшего управления.
Реклама

В данной работе будут рассмотрены классификация и методы для задач принятия решений, конкретизировано понятие принятия решений в условиях определенности. Рассмотрены понятия и приведены примеры некорректно поставленной задачи, регуляризирующего алгоритма, адаптивного алгоритма.
1. Принятие решений в условиях определенности
1.1 Определение
Проблема принятия решений носит фундаментальный характер, что определяется ролью, которую играют решения в любой сфере человеческой деятельности. Исследования этой проблемы относятся к числу междисциплинарных, поскольку выбор способа действий — это результат комплексной увязки различных аспектов: информационного, экономического, психологического, логического, организационного, математического, правового, технического и др.
Общая теория принятия решений, разработанная на основе математических методов и формальной логики, используется в экономике и имеет предпосылки для широкого распространения.
С позиции данной теории принятие решений по существу есть не что иное, как ВЫБОР. Принять решение - значит выбрать конкретный вариант действий из некоторого множества вариантов. Обычно их число конечно, а каждый вариант выбора определяет некоторый результат (экономический эффект, прибыль, выигрыш, полезность, надежность и т.д.), допускающий количественную оценку. Показатель, значение которого характеризует предельно достижимую эффективность по данной задаче, называется критерием оптимальности. (Ист. №4)
1.2 Классификация
Управленческие решения целесообразно группировать на основе классификационных признаков, приведенных на рис. 1. (Ист. №5)
Решения, принимаемые в условиях определенности
, применяются тогда, когда есть исчерпывающая информация о проблемной ситуации. Такие решения полностью программируемы. Руководитель, сталкиваясь с различными задачами, замечает, что некоторые из них периодически повторяются.
Решения, принимаемые в условиях вероятной определенности или с элементами риска,
применяются с осознанием того, что имеющейся информации недостаточно или она может быть недостоверной. Руководитель, как правило, может предвидеть все варианты последствий реализации такого решения. Эти решения частично программируемы. Решения, принимаемые в условиях неопределенности,
когда информации о проблемной ситуации явно недостаточно для принятия правильного решения, совершенно непрограммируемы. В условиях неопределенности, как правило, принимаются решения по новым и творческим задачам. (Ист. №5)
Реклама

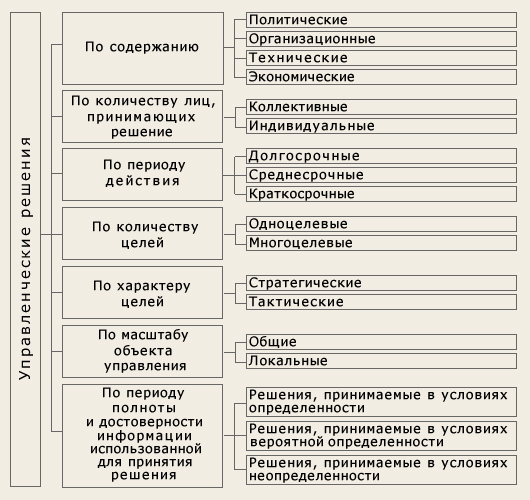
Рис. 1.
Классификация управленческих решений
Управленческие решения должны быть: эффективными, своевременными, рациональными, обоснованными и реально осуществимыми.
1.3
Определенность
Решение принимается в условиях определенности, когда руководитель может с точностью определить результат каждого альтернативного решения, возможного в данной ситуации. Сравнительно мало организационных или персональных решений принимается в условиях определенности. Однако они все-таки имеют место. Кроме того, элементы сложных крупных решений можно рассматривать как определенные. Уровень определенности при принятии решений зависит от внешней среды. Он увеличивается при наличии твердой правовой базы, ограничивающей количество альтернатив и снижающей уровень риска.
Как уже говорилось выше, решений, принимаемых в условиях абсолютной определенности, в реальной жизни быть не может. Однако существуют ситуации, когда решение принимается в условиях почти полной определенности. Например, решение о вложении нераспределенной прибыли в ценные бумаги государства. В данном случае менеджер точно знает размер вкладываемой суммы, может выбрать сроки вложения, рассчитать доходность и может точно подсчитать планируемую прибыль от данного вложения и сроки ее получения. Государство может не выполнить свои обязательства только при возникновении чрезвычайных обстоятельств, вероятность возникновения которых очень мала. (Ист. №6) 1.4
Методы
Решение может быть формальным и творческим. Принято считать, что если преобразование информации выполняется с помощью математических моделей, то выработанное решение считается формальным, если решение появляется в результате скрытой работы интеллекта человека, принимающего решение, то оно - творческое.
Такое деление в достаточной степени условно, поскольку чисто формального или чисто творческого решения не существует. Если решение вырабатывается с помощью математической модели, то знания и опыт человека (элементы творчества) используются при её создании, а интуиция (тоже момент творчества) – в момент, когда он задаёт то или иное значение параметра исходной информации или выбирает из множества альтернативных вариантов, полученных с помощью математической модели, один в качестве решения на управление. Если основным инструментом выработки решения является интеллект человека, то формальные методы, носителем которых практически является вся наука, скрыто присутствуют в его знаниях и опыте.
Формализуемые решения принимаются на основе соответствующих математических методов (алгоритмов). Математическая модель задачи оптимизации формализуемого решения включает следующие элементы:
1. заданную оптимизируемую целевую функцию (критерий управляемости): Ф=F(x1
,x2
,:,xn
), где xj
(j=1,2,:,n) - параметры, учитываемые при принятии решения (отражающие ресурсы принятия решений);
2. условия, отражающие ограниченность ресурсов и действий ЛПР при принятии решений: gi
(xj
)<ai
, ki
(xj
)=bi
; cj
<xj
<di
, i=1,2,:,m; j=1,2,:, n.
Непременным требованием для решения задачи оптимизации является условие n>m.
В зависимости от критерия эффективности, стратегий и факторов управления выбирается тот или иной метод (алгоритм) оптимизации.
Основными являются следующие классы методов:
1. методы линейного и динамического программирования (принятия решения об оптимальном распределении ресурсов);
2. методы теории массового обслуживания (принятие решения в системе со случайным характером поступления и обслуживания заявок на ресурсы);
3. методы имитационного моделирования (принятие решения путем проигрывания различных ситуаций, анализа откликов системы на различные наборы задаваемых ресурсов);
4. методы теории игр (принятие решений с помощью определения стратегии в тех или иных состязательных задачах);
5. методы теории расписаний (принятие решений с помощью разработки календарных расписаний выполнения работ и использования ресурсов);
6. методы сетевого планирования и управления (принятие решений с помощью оценки и перераспределения ресурсов при выполнении проектов, изображаемых сетевыми графиками);
7. методы многокритериальной (векторной) оптимизации (принятие решений при условии существования многих критериев оптимальности решения)
и другие методы. (Ист. №9)
2. Некорректно поставленные задачи
В качестве основного объекта рассматривается операторное уравнение: Az
= u
, где A
- линейный оператор, действующий из гильбертова пространства Z
в гильбертово пространство U
. Требуется найти решение операторного уравнения z
, соответствующее заданной неоднородности (или правой части уравнения) u
.
Такое уравнение является типичной математической моделью для многих физических, так называемых обратных, задач, если предполагать, что искомые физические характеристики z
не могут быть непосредственно измерены, а в результате эксперимента могут быть получены только данные u
, связанные с z
с помощью оператора A
.
Французским математиком Ж. Адамаром были сформулированы следующие условия корректности постановки математических задач, которые мы рассмотрим на примере записанного операторного уравнения. Задача решения операторного уравнения называется корректно поставленной (по Адамару), если выполнены следующие три условия (условия корректности):
1) задача имеет решение при любых допустимых исходных данных (решение существует ∀u
∈U
);
2) каждым исходным данным u
соответствует только одно решение (решение единственно);
3) решение устойчиво (если u n
→u ,  , Az
= u
, то z n
→z). , Az
= u
, то z n
→z).
Смысл первого условия заключается в том, что среди исходных данных нет противоречащих друг другу условий, что исключало бы возможность решения задачи.
Второе условие означает, что исходных данных достаточно для однозначной определённости решения задачи. Эти два условия обычно называют условиями математической определённости задачи. Условие 2) обеспечивается тогда и только тогда, когда оператор A
является взаимно однозначным (инъективным). Условия 1) и 2) означают, что существует обратный оператор  , причем его область определения D(
) (или множество значений оператора A
, R(A)
) совпадает с U
. , причем его область определения D(
) (или множество значений оператора A
, R(A)
) совпадает с U
.
Условие 3) означает, что обратный оператор является непрерывным, т.е. “малым” изменениям правой части u
соответствуют “малые” изменения решения z
. Третье условие обычно трактуется как физическая детерминированность задачи. Это объясняется тем, что исходные данные физической задачи, как правило, задаются с некоторой погрешностью; при нарушении же третьего условия как угодно малые возмущения исходных данных могут вызывать большие отклонения в решении.
Задачи, не удовлетворяющие хотя бы одному условию корректности, называются некорректными задачами (или некорректно поставленными). Более того, Ж. Адамар считал, что только корректные задачи должны рассматриваться при решении практических задач. Однако хорошо известны примеры некорректно поставленных задач, к изучению и численному решению которых приходится прибегать при рассмотрении многочисленных прикладных задач. Нужно отметить, что устойчивость и неустойчивость решения связаны с тем, как определяется пространство решений Z
. Выбор пространства решений (в том числе и нормы в нем) обычно определяется требованиями прикладной задачи. Задачи могут быть некорректно поставленными при одном выборе нормы и корректно поставленными при другом.
Многочисленные обратные (в том числе и некорректные) задачи можно найти в различных областях физики. Так, астрофизик не может активно воздействовать на процессы, происходящие на далеких звездах и галактиках, ему приходится делать заключения о физических характеристиках весьма удаленных объектов по их косвенным проявлениям, доступным измерениям на Земле или вблизи Земли (на космических станциях). Прекрасные примеры некорректных задач можно найти в медицине, прежде всего, нужно отметить вычислительную (или компьютерную) томографию. Хорошо известны приложения некорректных задач в геофизике (на самом деле, легче и дешевле судить о том, что делается под поверхностью Земли, решая обратные задачи, чем заниматься бурением глубоких скважин), радиоастрономии, спектроскопии, ядерной физике и т.д., и т.п.
Хорошо известным примером некорректно поставленной задачи является интегральное уравнение Фредгольма 1-го рода. Пусть оператор A
имеет вид:
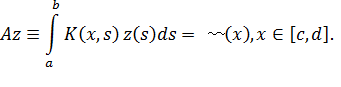
Пусть ядро интегрального оператора K
(x
, s
) - функция, непрерывная по совокупности аргументов x
∈[c
, d
], s
∈[a
,b
], а решение z
(s
) - непрерывная на отрезке [a
,b
] функция. Тем самым, можно рассматривать оператор A
как действующий в следующих пространствах: A
:C
[a
,b
]→ C
[c
, d
]. (Пространство C
[a
,b
] состоит из функций, непрерывных на отрезке [a
,b
]. Норма z
∈C
[a
,b
]определяется как  ). Покажем, что в этом случае задача решения интегрального уравнения является некорректно поставленной. Для этого нужно проверить условия корректности постановки задачи: ). Покажем, что в этом случае задача решения интегрального уравнения является некорректно поставленной. Для этого нужно проверить условия корректности постановки задачи:
1) Существование решения для любой непрерывной на [c
, d
] функцииu
(x
) . На самом же деле, это не так: существует бесконечно много непрерывных функций, для которых решения нет.
2) Единственность решения. Это условие выполняется в том и только в том случае, если ядро интегрального оператора замкнуто.
Первые два условия корректности эквивалентны условию существования обратного оператора с областью определения D(
)=C
[c
,d
]. Если ядро интегрального оператора замкнуто, то обратный оператор существует, однако область его определения не совпадает с C
[c
,d
].
3) Устойчивость решения. Это означает, что для любой последовательности  последовательность z n
→ последовательность z n
→ . Устойчивость эквивалентна непрерывностиобратного оператора при условии, что обратный оператор существует. В данном случае это нетак, что видно из следующего примера. Пусть последовательность непрерывных функций . Устойчивость эквивалентна непрерывностиобратного оператора при условии, что обратный оператор существует. В данном случае это нетак, что видно из следующего примера. Пусть последовательность непрерывных функций  , n=
1, 2, …
, такая, что , n=
1, 2, …
, такая, что  на промежутке на промежутке  и обращается в нуль вне данного интервала, max| z
(s
) |=1, s
∈[a
, b
], а последовательность чисел d → 0 +0 . и обращается в нуль вне данного интервала, max| z
(s
) |=1, s
∈[a
, b
], а последовательность чисел d → 0 +0 .
4) Такая функция может быть выбрана, например, кусочно-линейной. Тогда для любого x
∈[c
, d
]

при 
Последовательность функций  равномерно, т.е. по норме C
[c
,d
], сходится к равномерно, т.е. по норме C
[c
,d
], сходится к  = 0. = 0.
Хотя решение уравнения  в этом случае = 0 , последовательность в этом случае = 0 , последовательность  не стремится к , так как не стремится к , так как . .
Интегральный оператор A
является вполне непрерывным при действии из  в в
 , при действии из C
[a
,b
] в и при действии из C
[a
,b
] в C
[c
,d
]. (Пространство , при действии из C
[a
,b
] в и при действии из C
[a
,b
] в C
[c
,d
]. (Пространство
состоит из функций, интегрируемых с квадратом на отрезке [a
,b
]. Норма z
∈ определяется как определяется как  ). Это означает, что любую ограниченнуюпоследовательность этот оператор преобразует в компактную. Компактная последовательность поопределению обладает тем свойством, что из любой ее подпоследовательности можно выделитьсходящуюся. Легко указать последовательность , ). Это означает, что любую ограниченнуюпоследовательность этот оператор преобразует в компактную. Компактная последовательность поопределению обладает тем свойством, что из любой ее подпоследовательности можно выделитьсходящуюся. Легко указать последовательность ,  , из которой нельзя выделить сходящуюся в C
[a
,b
] подпоследовательность. Например, , из которой нельзя выделить сходящуюся в C
[a
,b
] подпоследовательность. Например,

Нормы всех членов этой последовательности равны 1 в , но из любой подпоследовательности этой последовательности нельзя выделить сходящуюся, поскольку  . Очевидно, что эта последовательность состоит из непрерывных на [a
,b
] функций и равномерно (по норме C
[a
,b
]) ограничена, но из этой последовательности нельзя выделить сходящуюся в C
[a
,b
] подпоследовательность (тогда она сходилась бы и в , поскольку из равномерной сходимости следует сходимость в среднем). Если предположить, что оператор является непрерывным, то легко прийти к противоречию. Для существования обратного оператора достаточно потребовать, чтобы прямой оператор A
был инъективным. Очевидно, что, если оператор B
: C
[c
,d
]→C
[a
,b
] непрерывный, а оператор A
вполне непрерывный, то BA
:C
[a
,b
] →C
[a
,b
] - тоже вполне непрерывный оператор. Но тогда, поскольку для любого n . Очевидно, что эта последовательность состоит из непрерывных на [a
,b
] функций и равномерно (по норме C
[a
,b
]) ограничена, но из этой последовательности нельзя выделить сходящуюся в C
[a
,b
] подпоследовательность (тогда она сходилась бы и в , поскольку из равномерной сходимости следует сходимость в среднем). Если предположить, что оператор является непрерывным, то легко прийти к противоречию. Для существования обратного оператора достаточно потребовать, чтобы прямой оператор A
был инъективным. Очевидно, что, если оператор B
: C
[c
,d
]→C
[a
,b
] непрерывный, а оператор A
вполне непрерывный, то BA
:C
[a
,b
] →C
[a
,b
] - тоже вполне непрерывный оператор. Но тогда, поскольку для любого n
 , то последовательность компактна, что неверно. Оператор, обратный к вполне непрерывному оператору, не может быть непрерывным. Аналогичное доказательство может быть проведено для любых бесконечномерных банаховых (т.е. полных нормированных) пространств. , то последовательность компактна, что неверно. Оператор, обратный к вполне непрерывному оператору, не может быть непрерывным. Аналогичное доказательство может быть проведено для любых бесконечномерных банаховых (т.е. полных нормированных) пространств.
Поскольку задача решения интегрального уравнения Фредгольма первого рода в указанных пространствах некорректно поставлена, то даже при очень малых ошибках в задании u
(x
) решение может либо отсутствовать, либо как угодно сильно отличаться от искомого точного решения.
Итак, вполне непрерывный инъективный оператор обладает обратным оператором, который не является непрерывным (ограниченным). Более того, при действии в бесконечномерных банаховых пространствах множество значений вполне непрерывного оператора не является замкнутым. Поэтому как угодно близко к неоднородности u
(x
) , для которой решение операторного уравнения существует, найдется неоднородность, для которой решение отсутствует.
Некорректность постановки математической задачи может быть связана с ошибкой в задании оператора. Простейший пример дает задача отыскания нормального псевдорешения системы линейных алгебраических уравнений и возникающая при этом неустойчивость, связанная с ошибками задания матрицы.
Пусть дана система линейных алгебраических уравнений (СЛАУ):

Система может и не иметь решений. Гаусс и Лежандр в начале XIX века ввели метод наименьших квадратов, а именно, вместо решения СЛАУ предложили минимизировать квадратичный функционал (невязку):

 - сопряженная (транспонированная) матрица. Поскольку матрица - сопряженная (транспонированная) матрица. Поскольку матрица  неотрицательно неотрицательно
определена, то Ф
(x
)- выпуклый функционал. Для выпуклого функционала задача отыскания  эквивалентна отысканию стационарной точки, т.е. решения уравнения Ф
'(x
) = 0 . Легко видеть, что Ф
' (x
) = 2 ⋅(Ax
−b
), Ф
''(x
) = 2 ⋅A
≥0. эквивалентна отысканию стационарной точки, т.е. решения уравнения Ф
'(x
) = 0 . Легко видеть, что Ф
' (x
) = 2 ⋅(Ax
−b
), Ф
''(x
) = 2 ⋅A
≥0.
Из равенства градиента нулю получается система линейных алгебраических уравнений с квадратной неотрицательно определенной матрицей (система нормальных уравнений):

В конечномерном случае легко доказать, что для любого вектора b
система нормальных
уравнений всегда имеет решение (для исходного же уравнения это не обязательно), которое называется псевдорешением системы Ax
= b
. Псевдорешение может быть неединственным (если определитель det(A
) =0; если же det(A
) ≠0, то псевдорешение единственно). Множество псевдорешений образует аффинное (или линейное) подпространство и является выпуклым и замкнутым.
Если же система Ax
=b
имеет решение, то оно совпадает с решением системы Ax
= b
. В этом случае minФ
(x
) =μ=0. Если же minФ
(x
) =μ>0, система Ax
= b
не имеет решений, но, какуже указывалось выше, имеет псевдорешение (возможно, неединственное). Число μ обычноназывается мерой несовместности системы Ax
= b
.
Определение.
Нормальное псевдорешение  системы Ax
= b
– это псевдорешение с системы Ax
= b
– это псевдорешение с
минимальной нормой, что является решением задачи отыскания минимума  . .
Можно привести много др. примеров классических математических задач, являющихся некорректными при совершенно естественном выборе понятий меры точности как для исходных данных задачи, так и для возможных решений: решение систем линейных алгебраических уравнений с определителем, равным нулю; задача оптимального планирования; решение интегральных уравнений 1-го рода; задача аналитического продолжения; суммирование рядов Фурье; большое число краевых задач для уравнении с частными производными. (Ист. №10)
Пусть дано операторное уравнение: Az
= u
, где A
- линейный оператор, действующий из нормированного пространства Z
в нормированное пространство U
. В 1963 г. А.Н.Тихонов дал знаменитое определение регуляризирующего алгоритма (РА), которое лежит в основе современной теории некорректно поставленных задач.
Определение. Регуляризирующим алгоритмом (регуляризирующим оператором)  называется оператор, обладающий двумя следующими свойствами: называется оператор, обладающий двумя следующими свойствами:
1)  определен для любых δ > 0 , определен для любых δ > 0 ,  ∈U
, и отображает (0,+ ∝) ×U
в Z
; ∈U
, и отображает (0,+ ∝) ×U
в Z
;
2) для любого z
∈Z
и для любого ∈U
такого, что Az
= u
, 
 . .
Задача решения уравнения первого рода называется регуляризируемой, если существует хотя бы один регуляризирующий алгоритм. Непосредственно из определения следует, что если существует хотя бы один РА, то их существует бесконечно много.
В настоящее время все математические задачи можно разделить на следующие классы:
1) корректно поставленные задачи;
2) некорректно поставленные регуляризируемые задачи;
3) некорректно поставленные нерегуляризируемые задачи.
Понятно, что корректно поставленные задачи являются регуляризируемыми, поскольку можноположить  . Отметим, что знание δ > 0 в этом случае необязательно. . Отметим, что знание δ > 0 в этом случае необязательно.
Далеко не все некорректно поставленные задачи можно регуляризировать, причем это часто зависит от выбора пространств Z
, U.
Российский математик Л.Д.Менихес построил пример интегрального оператора с непрерывным замкнутым ядром, действующего из пространства C
[0,1] в  , обратная задача для которого (т.е. решение интегрального уравнения Фредгольма 1-го рода) является нерегуляризируемой. Это связано со свойствами пространства C
[0,1]. Ниже будет показано, что если пространство Z
гильбертово, а оператор A
ограниченный и инъективный, то задача решения операторного уравнения первого рода является регуляризируемой. Этот результат справедлив и для некоторых банаховых пространств, но не для всех. В частности, пространство C
[0,1] к таким банаховым пространствам не относится. , обратная задача для которого (т.е. решение интегрального уравнения Фредгольма 1-го рода) является нерегуляризируемой. Это связано со свойствами пространства C
[0,1]. Ниже будет показано, что если пространство Z
гильбертово, а оператор A
ограниченный и инъективный, то задача решения операторного уравнения первого рода является регуляризируемой. Этот результат справедлив и для некоторых банаховых пространств, но не для всех. В частности, пространство C
[0,1] к таким банаховым пространствам не относится.
Можно дать эквивалентное определение регуляризирующего алгоритма и регуляризируемости операторного уравнения. Пусть задан оператор (отображение)  , причем определен для любых δ > 0, , причем определен для любых δ > 0,  ∈U
, и отображает (0,+ ∝) ×U
в Z.
Погрешность решения операторного уравнения в точке z
∈Z
с помощью оператора ∈U
, и отображает (0,+ ∝) ×U
в Z.
Погрешность решения операторного уравнения в точке z
∈Z
с помощью оператора  при условии, что правая часть u
задана с погрешностью δ >0, определяется как при условии, что правая часть u
задана с погрешностью δ >0, определяется как

Оператор  называется регуляризирующим оператором, если для любого z
∈Z называется регуляризирующим оператором, если для любого z
∈Z
 .
Легко видеть, что данное определение эквивалентно данному выше. .
Легко видеть, что данное определение эквивалентно данному выше.
Аналогично можно дать определение регуляризирующего алгоритма для задачи вычисления значений оператора (см. конец предыдущего параграфа), т.е. для задачи вычисления значений отображения G
: D
(G
) → Y
, D
(G
) ⊆X
при условии, что аргумент задан с погрешностью (X
, Y
– метрические или нормированные пространства). Разумеется, задача решения операторного уравнения при условии, что A
– инъективный оператор, может рассматриваться как задача вычисления значений оператора .
Огромное значение имеет ответ на следующий очень важный вопрос, можно ли решить некорректную задачу, т.е. построить регуляризирующий алгоритм, не зная погрешность δ Если задача корректна, то устойчивый метод, очевидно, можно построить и без знания δ.
Так, в случае решения операторного уравнения  . В случае некорректных задач это невозможно. Приведенная ниже теорема принадлежит А.Б.Бакушинскому и была им доказана для задачи вычисления значений оператора. Аналогичная теорема имеет место и для решения операторного уравнения. . В случае некорректных задач это невозможно. Приведенная ниже теорема принадлежит А.Б.Бакушинскому и была им доказана для задачи вычисления значений оператора. Аналогичная теорема имеет место и для решения операторного уравнения.
Теорема
. Если для вычислений значений оператора G
на множестве D
(G
) ⊆X
существует регуляризирующий оператор, не зависящий от δ (явно), то существует продолжение G
на X
, которое непрерывно на D
(G
) ⊆X
.
Итак, построение регуляризирующих алгоритмов, не зависящих явно от погрешности,
возможно только для задач, корректных на своей области определения.
Следующим свойством некорректно поставленных задач является невозможность оценить погрешность решения, даже если известна погрешность задания правой части операторного уравнения или погрешность задания аргумента в задаче вычисления значений оператора. Этот принципиально важный результат был также впервые доказан А.Б.Бакушинским для решения операторного уравнения.
Теорема.
Пусть  для любого z
∈D
⊆Z
. Тогда сужение обратного оператора на множество AD
: для любого z
∈D
⊆Z
. Тогда сужение обратного оператора на множество AD
:  непрерывно на AD
. Таким образом, равномерная по z
оценка погрешности решения операторного уравнения на множестве D
⊆Z
возможна только в том случае, когда обратный оператор непрерывен на AD
. Таким образом, равномерная по z
оценка погрешности решения операторного уравнения на множестве D
⊆Z
возможна только в том случае, когда обратный оператор непрерывен на AD
. Данная теорема справедлива и для нелинейных операторных уравнений, причем в метрических пространствах. непрерывно на AD
. Таким образом, равномерная по z
оценка погрешности решения операторного уравнения на множестве D
⊆Z
возможна только в том случае, когда обратный оператор непрерывен на AD
. Таким образом, равномерная по z
оценка погрешности решения операторного уравнения на множестве D
⊆Z
возможна только в том случае, когда обратный оператор непрерывен на AD
. Данная теорема справедлива и для нелинейных операторных уравнений, причем в метрических пространствах.
Из определения регуляризирующего алгоритма легко следует, что, если есть хотя бы один регуляризирующий алгоритм, то их может быть сколько угодно. Выбрать же тот, который дает наименьшую ошибку, или сравнивать алгоритмы, сравнивая ошибки полученных приближенных решений, при решении некорректных задач, невозможно при отсутствии априорной информации, которая фактически преобразует такие задачи в корректные.
Регуляризирующие алгоритмы для операторных уравнений в бесконечномерных банаховых пространствах нельзя сравнивать и по скорости сходимости приближенного решения к точному при стремлении погрешности входных данных к нулю. Этот важный результат принадлежит В.А.Винокурову. (Ист. №1)
1. Пусть Z,U – гильбертовы пространства, а A – линейный ограниченный оператор, действующий из Z в U. Рассмотрим операторное уравнение

Без ущерба для общности будем считать, что ||A||<1. Предположим, что для  уравнение (1) имеет нормальное псевдорешение уравнение (1) имеет нормальное псевдорешение  . Будем решать задачу его устойчивого нахождения по приближенным данным уравнения (1) . Будем решать задачу его устойчивого нахождения по приближенным данным уравнения (1)  , пологая оператор А заданным точно. Таким образом, требуется по данным , пологая оператор А заданным точно. Таким образом, требуется по данным  найти такой элемент найти такой элемент  ,который сильно сходиться в Z к ,который сильно сходиться в Z к  при при  . .
2. Эта задача может быть решена многими методами (регуляризирующими алгоритмами). Например, для ее решения можно использовать метод невязки (в обобщенной форме для решения несовместных уравнений). В этом методе приближение  к к  ищется как решение экстремальной задачи ищется как решение экстремальной задачи
 . .
Здесь  - оценка меры несовместности - оценка меры несовместности
 решаемого операторного уравнения. Известно, что без привлечения дополнительной информации об искомом решении или о точных данных задачи ( решаемого операторного уравнения. Известно, что без привлечения дополнительной информации об искомом решении или о точных данных задачи ( ) метод невязки не может обеспечить точность приближенного решения лучше, чем ) метод невязки не может обеспечить точность приближенного решения лучше, чем  . Аналогичная ситуация складывается и при использовании метода регуляризации А. Н. Тихонова, в котором наилучшая возможная точность есть . Аналогичная ситуация складывается и при использовании метода регуляризации А. Н. Тихонова, в котором наилучшая возможная точность есть  , как бы ни выбирался параметр регуляризации. Это явление обычно называют «насыщением точности» регуляризирующего алгоритма (РА). Его можно избежать, если учесть в РА априорную информацию о свойствах точного решения. Например, если известно, что , как бы ни выбирался параметр регуляризации. Это явление обычно называют «насыщением точности» регуляризирующего алгоритма (РА). Его можно избежать, если учесть в РА априорную информацию о свойствах точного решения. Например, если известно, что  ,
где ,
где  , то, используя величину p,
можно построить РА, которые дают приближение с порядком точности , то, используя величину p,
можно построить РА, которые дают приближение с порядком точности  , оптимальным на классе задач (1) с решениями указанного вида. , оптимальным на классе задач (1) с решениями указанного вида.
С другой стороны, можно, не зная величины р,
но используя оценку  , построить РА, которые позволяют устойчиво определять число р
и получать приближение к с оптимальным порядком точности для произвольного р>
0. Алгоритмы такого рода предлагаются в данной заметке. , построить РА, которые позволяют устойчиво определять число р
и получать приближение к с оптимальным порядком точности для произвольного р>
0. Алгоритмы такого рода предлагаются в данной заметке.
3. Сформулируем основные положения. Пусть известно, что нормальное псевдорешение задачи (1) истокообразно представимо с помощью степени оператора  . Поскольку такое представление не единственно, будем иметь ввиду, что . Поскольку такое представление не единственно, будем иметь ввиду, что

где р>
0 – максимально возможное число. В общем случае число р
полагается неизвестным, но при этом считается, что дана величина r.
Ниже будет использована величина  - устойчивая оценка меры несовместимости - устойчивая оценка меры несовместимости  уравнения (1), удовлетворяющая требованиям: уравнения (1), удовлетворяющая требованиям: 
 . .
В качестве можно выбрать, например, упомянутое выше число  . .
4. Методику построения алгоритмов рассмотрим на примере специализированного метода невязки. Предлагаемый РА основан на решении экстремальной задачи: при заданном параметре  найти элемент найти элемент  такой, что такой, что

(C=const > 1). Алгоритм состоит из двух шагов:
1) Найти число

2) Вычислить при  решение решение  задачи (3) и применять элемент задачи (3) и применять элемент  в качестве приближения к . в качестве приближения к .
Экстремальные задачи (3), (4) обладают важными свойствами.
Теорема 1.
Пусть выполнено (2). Тогда задача (3) однозначно разрешима при всяком  Для каждого Для каждого  , найдется такое число , найдется такое число  , что при любом , что при любом  , для решения задачи (3) справедлива оценка: , для решения задачи (3) справедлива оценка: 
Теорема 2.
Если выполнено (2), то решение задачи (4) конечно, и при каждом , для него верна оценка
 . .
Теорема 3.
Если  , то для решения задачи (3) при выполнено неравенство , то для решения задачи (3) при выполнено неравенство  . .
Сходимость приближенных решений устанавливает
Теорема 4.
Если выполнено условие (2), то  при и обеспечены сильные сходимости в Z
: при и обеспечены сильные сходимости в Z
:
 . При этом . При этом  . .
Введем множество  . Ясно, что . Ясно, что  . Тогда из приведенной в теореме 4 оценки и из теории оценивания погрешности приближенных решений некорректных задач на множествах типа . Тогда из приведенной в теореме 4 оценки и из теории оценивания погрешности приближенных решений некорректных задач на множествах типа  вытекает вытекает
Теорема 5.
При выполнении условий (2) метод (3), (4) гарантирует при любом р>
0 оптимальный порядок точности приближенного решения для задач (1), у которых  . .
Рассмотрим случай, когда оператор А –
вполне непрерывный. Тогда множество - образ слабого компакта в Z –
является сильным компактом. Это следует из того, что оператор  также будет вполне непрерывным. По этой причине задача решения уравнения (1) приобретает интересные свойства. На основе этих свойств могут быть построены регуляризирующие алгоритмы, допускающие апостериорную оценку погрешности решения. также будет вполне непрерывным. По этой причине задача решения уравнения (1) приобретает интересные свойства. На основе этих свойств могут быть построены регуляризирующие алгоритмы, допускающие апостериорную оценку погрешности решения.
Отметим теперь следующий тривиальный результат.
Теорема 6.
Если в дополнение к условиям теоремы 5 известны, что оператор А
нормально разрешим, то алгоритм (3), (4) при любом р >
0 дает точность  . .
5. Из теорем 5,6 следует, что алгоритм (3), (4), не используя данных о степени р
истокообразной представимости элемента , в процессе решения задачи сам «настраивается» на нужную величину р.
В связи с этим дадим
Определение.
Регуляризирующий алгоритм называется адаптивным для задач (1) с решениями из некоторого семейства множеств { }, зависящих от параметра р,
если: 1) он не использует явно величину р
, определяемую включением }, зависящих от параметра р,
если: 1) он не использует явно величину р
, определяемую включением  ; 2) он оптимален по порядку точности для всякого независимо от допустимого параметра р. ; 2) он оптимален по порядку точности для всякого независимо от допустимого параметра р.
Примером адаптивного РА служит алгоритм (3), (4). Имеются и другие адаптивные РА, для которых справедливы такие же результаты, как в теоремах 4-6. К числу таких РА относятся специализированный метод регуляризации А.Н. Тихонова, эквивалентный методу (3), (4), специализированный метод квазирешений, получаемый из обычного метода квазирешений [5] по схеме, которая использована в методе (3), (4). Все эти адаптивные алгоритмы были программно реализованы в системе MATLAB и показали свою высокую эффективность в численных эксперементах.
6. Остановимся особо на случае, когда при выполнении условий (2) степень истокопредсавимости р
точного решения задачи (1) известна. Тогда нет необходимости использовать величину r
. В качестве приближения к в этом случае можно взять элемент  - решение задачи (3) при - решение задачи (3) при 
Справедлива
Теорема 7.
Гарантированы сильные сходимости:  . Приближение . Приближение  имеет оптимальный порядок точности имеет оптимальный порядок точности  .
Если оператор А
нормально разрешим, то при всяком р > 0
верна оценка: .
Если оператор А
нормально разрешим, то при всяком р > 0
верна оценка:  . (Ист. №7) . (Ист. №7)
Кроме специализированного метода невязки, адаптивными являются также и некоторые другие регуляризующие алгоритмы. Сформулируем и кратко обсудим важнейшие из них.
Специализированный метод регуляризации А. Н. Тихонова.
Он основан на решении следующей параметрической задачи: при фиксированном β
> 0 и при заданном параметре α>0
найти элемент  ,
такой что ,
такой что
 (5.1) (5.1)
Алгоритм этого метода состоит из таких шагов: 1) выбор параметра регуляризации α(δ,β)>0 для каждого β
> 0 по (обобщенному) принципу невязки , то есть как решение уравнения
 (5.2) (5.2)
2)использование элементов  ,
получаемых в результате решения задачи (5.1) с ,
получаемых в результате решения задачи (5.1) с
 ,
для нахождения числа ,
для нахождения числа  по правилу по правилу

3) принятие в качестве приближения к элемента  Имеется тесная связь метода регуляризации с выбором параметра регуляризациипо (обобщенному) принципу невязки и метода невязки. Имеется тесная связь метода регуляризации с выбором параметра регуляризациипо (обобщенному) принципу невязки и метода невязки.
Теорема 8.
Элемент  , вычисляемый в шагах 1, 2 алгоритма специализированного метода регуляризации, по крайней мере при достаточно малых δ совпадает с элементом , вычисляемый в шагах 1, 2 алгоритма специализированного метода регуляризации, по крайней мере при достаточно малых δ совпадает с элементом  , полученным в специализированном методе невязки. Число , полученным в специализированном методе невязки. Число  , определяемое этими алгоритмами, — одно и то же при таких δ. , определяемое этими алгоритмами, — одно и то же при таких δ.
Доказательство . Существование единственного решения задачи (5.1) следует из общей теории метода регуляризации линейных некорректных задач в гильбертовых пространствах. Существование и единственность параметра регуляризации  ,
выбираемого из условия (5.2), при каждом фиксированном βвытекает из результатов работ. Установлена эквивалентность принципа и метода невязки при решении линейных операторных уравнений в гильбертовых пространствах в случае, если ,
выбираемого из условия (5.2), при каждом фиксированном βвытекает из результатов работ. Установлена эквивалентность принципа и метода невязки при решении линейных операторных уравнений в гильбертовых пространствах в случае, если  и δ
достаточно мало. Поэтому и δ
достаточно мало. Поэтому  при каждом при каждом  > 0. Но тогда задача нахождения величины > 0. Но тогда задача нахождения величины  оказывается одной и той же для обоих специализированных алгоритмов и поэтому имеет одно и то же решение. оказывается одной и той же для обоих специализированных алгоритмов и поэтому имеет одно и то же решение.
В силу установленной в теореме 4.1 эквивалентности алгоритмов специализированного метода регуляризации и специализированного метода невязки для первого из них справедливы те же результаты о сходимости и оптимальности порядка точности приближений, что и для второго. Это можно суммировать так.
Теорема 9.
Пусть выполнены условия (2). Тогда для величин ,  и и  , полученных по специализированному методу регуляризации, гарантируются сходимости при , полученных по специализированному методу регуляризации, гарантируются сходимости при  . .
Этот метод оптимален по порядку точности при всяких  и при каждом p
> 0. Он обеспечивает неулучшаемый порядок точности на всем классе и при каждом p
> 0. Он обеспечивает неулучшаемый порядок точности на всем классе  , каково бы ни было p
> 0, причем гарантированная верхняя оценка точности есть , каково бы ни было p
> 0, причем гарантированная верхняя оценка точности есть  . .
Теорема 9 обосновывает адаптивность алгоритма специализированного метода регуляризации.
Специализированный метод квазирешений.
Он базируется на решении экстремальной задачи: при фиксированном числе β
> 0 найти элемент  ,
для которого ,
для которого
 (6.1) (6.1)
В задаче (6.1) минимизируется непрерывный выпуклый (квадратичный) функционал на замкнутом, выпуклом, ограниченном множестве гильбертова пространства. Известно, что такая задача разрешима. Будем использовать далее произвольное ее решение  при каждом рассматриваемом β
> 0. Алгоритм специализированного метода квазирешений состоит из следующих шагов: 1) найти число при каждом рассматриваемом β
> 0. Алгоритм специализированного метода квазирешений состоит из следующих шагов: 1) найти число
 (6.2) (6.2)
здесь числовое множество  определяется так: определяется так:
 (6.3) (6.3)
2) решить при =
задачу (6.1) и по ее решению найти приближение
 . .
Множество  из задачи (6.2) не пусто по крайней мере для «малых δ»:
0 < δ
< из задачи (6.2) не пусто по крайней мере для «малых δ»:
0 < δ
< Действительно при 0 < δ
<и при Действительно при 0 < δ
<и при справедливо включение справедливо включение  .
Из него и из задачи (6.1) с учетомоценки || .
Из него и из задачи (6.1) с учетомоценки || || || для таких δ и βполучим: для таких δ и βполучим:

и это значит, что  . .
Конечность величины устанавливается, причем для этого верна та же оценка, что и в замечании 2. Из (6.1)-(6.3) следуют неравенства

Используя их можно получить сходимости  при . Из сказанного ясно, что для приближенных решений задачи (1), которые находятся по специализированному методу квазирешений, верны результаты теоремы 9. Поэтому данный алгоритм является адаптивным. (Ист.№8) при . Из сказанного ясно, что для приближенных решений задачи (1), которые находятся по специализированному методу квазирешений, верны результаты теоремы 9. Поэтому данный алгоритм является адаптивным. (Ист.№8)
Вывод
Решение – это выбор альтернативы. Принятие решений – связующий процесс, необходимый для выполнения любой управленческой функции. Лицо,принимающее решение своими решениями может повлиять на судьбы многих людей и организаций. В зависимости от уровня сложности задач, среда принятия решений варьируется в зависимости от степени риска. Условия определенности существуют, когда руководитель точно знает результат, который будет иметь каждый выбор. Методы приближённого решения некорректно поставленных задач и их применений к решению обратных задач имеют важное значение для автоматизации обработки наблюдений и для решения проблем управления. Имеется много работ (особенно советских математиков), посвященные этим методам.Существовало мнение, что некорректные задачи не могут встречаться при решении физических и технических задач и что для некорректных задач невозможно построение приближённого решения в случае отсутствия устойчивости. Расширение средств автоматизации при получении экспериментальных данных привело к большому увеличению объёма таких данных; необходимость установления по ним информации о естественнонаучных объектах потребовала рассмотрения некорректных задач. Развитие электронной вычислительной техники и применение её к решению математических задач изменило точку зрения на возможность построения приближённых решений некорректно поставленных задач.
Из определения регуляризирующего алгоритма легко следует, что, если есть хотя бы один регуляризирующий алгоритм, то их может быть сколько угодно. Выбрать же тот, который дает наименьшую ошибку, или сравнивать алгоритмы, сравнивая ошибки полученных приближенных решений, при решении некорректных задач, невозможно при отсутствии априорной информации, которая фактически преобразует такие задачи в корректные.
К числу адаптивных регуляризирующих алгоритмов относятся специализированный метод регуляризации А.Н. Тихонова, специализированный метод квазирешений, получаемый из обычного метода квазирешений по определенной схеме. Все эти адаптивные алгоритмы были программно реализованы в системе MATLAB и показали свою высокую эффективность в численных эксперементах.
Список использованных источников
1. Бакушинский А. Б., Гончарский А.В. Некорректные задачи. Численные методы и приложения. – М.: Изд-во Моск. ун-та, 1989. – 199 с.
3. Гимади Э.Х. О некоторых математических моделях и методах планирования крупномасштабных проектов / Э.Х. Гимади //Модели и методы оптимизации. Труды Института математики. - Новосибирск.: Наука. Сиб. Отд–ние. - 1988. - С. 89–115
4. Горский
П. Введение в прикладную дисциплину «поддержка принятия решений» С. 1-5 [Электронный ресурс]http://www.devbusiness.ru/development/dms/dms_intro.htm
5. Грищенко О.В.
Управленческий учет / О.В.Грищенко // Понятие об управленческих решениях и их классификация //Конспект лекций. - Таганрог.: ТТИ ЮФУ, 2007. – 69 с. [Электронный ресурс] http://www.aup.ru/books/m166/6_1.htm
6. Казиев В.М. Введение в анализ, синтез и моделирование систем. / В.М. Казиев // Лекция 13: Основы принятия решений и ситуационного моделирования. – М.: Интернет универ. – 2006. - С.49-53 [Электронный ресурс] http://www.intuit.ru/department/expert/intsys/13/4.html
7. Леонов А.С., Ягола А.Г. Адаптивные регулизирующие алгоритмы для решения некоректных задач / М.: Вестник Московского университета. - 1998. - No. 2 (март-апрель). - С. 62-63 [Электронный ресурс]
http://www.phys.msu.ru/upload/iblock/a84/98-2-62.pdf
8. Леонов А.С., Ягола А.Г. Оптимальные методы решения некорректных задач с истокообразно представимыми решениями / М.: Фундамент. и прикл. матем. - 1998том4, выпуск3. – С. 1029–1046 [Электронный ресурс] http://www.mathnet.ru/links/def37868bce5b5f5d14bfa300b7b6912/fpm_340_card_rus.pdf
9. Планкетт Л., Выработка и принятие управленческих решений, М.: Наука, 1984 г. – 146с.
10. Тихонов А.Н. О решении некорректно поставленных задач и методе регуляризации//Доклады АН СССР. – 1963. – 151. – №3. – С.501-504.
|
