Міністерство науки та освіти України
Одеський національний політехнічний університет
Енергетичний інститут
Кафедра АТП
Курсова робота
з дисципліни: «Теорія автоматичного керування»
на тему: «Визначення оптимальних настройок ПІ-регулятора в АСР зі звеном другого порядку із запізненням »
Одеса – 2010
Содержание
1. Цель курсовой работы
2. Постановка технической задачи и исходные данные
3. Порядок выполнения курсовой работы
3.1 Определение передаточной функции объекта управления
3.2 Расчёт корней характеристического уравнения. Построение кривой разгона
3.3 Теоретическая часть расчёта комплексно-частотной характеристики объекта
3.4 Построение комплексно-частотной характеристики объекта
3.5 Теоретические сведения, требуемые для построения зоны устойчивости АСР
3.6 Построение зоны устойчивости АСР
3.7 Теоретические сведения, необходимые для аналитического расчёта оптимальных настроек ПИ-регулятора
3.8 Построение линии m=const и определение оптимальных настроек ПИ-регулятора
3.9 Теоретические сведения, требуемые для построения КЧХ разомкнутой АСР
3.10 Построение КЧХ разомкнутой АСР. Определение запаса устойчивости по модулю и фазе
3.11 Теоретические сведения, необходимые для построения действительной части КЧХ замкнутой АСР
3.12 Построение действительной части КЧХ замкнутой АСР
3.13 Выбор настроек ПИ- регулятора по методу Кона
3.14 Выбор настроек ПИ- регулятора по методу Копеловича
3.15 Сравнение переходных процессов регулирования с оптимальными настройками ПИ-регулятора, полученными различными методами
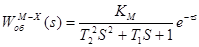
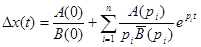
3.16 Аналитическое определение переходного процесса регулирования
Вывод
Литература
1. Цель курсовой работы
- формирование знаний теории линейных одноконтурных автоматических систем регулирования (АСР);
- закрепление умений применять на практике инженерные способы выбора настроек регулятора и анализа переходных процессов регулирования с использованием цифровой и аналоговой вычислительной техники
- приобретение профессиональных знаний путём моделирования на ЭВМ, графических построений и сравнительного анализа результатов.
2. Постановка технической задачи и исходные данные
1. Для объекта управления, который описан дифференциальным уравнением 2-го порядка с запаздыванием, выбрать регулятор, который способен обеспечить заданное качество переходных процессов регулирования.
Реклама

2. С использованием ЭВМ вычислить настройки регулятора, проверить предусмотренный переходный процесс расчётом его координат и моделированием на ЭВМ.
3. Проверить наличие запасов устойчивости АСР по модулю и по фазе, а также исследовать влияние на них свойств объекта и настроек регулятора.
4. Оценить эффективность различных инженерных способов выбора настроек, таких как: метод Кона, метод Копеловича, метод Солодовникова, а также расчётный метод.
Исходные данные для выполнения данной курсовой работы приведены в таблице 1.
Таблица 1 Исходные данные
| № варианта |
Км |
τ |
Т1
|
Т2
|
m |
∆N |
| ед/ед |
с |
с |
с |
вольт |
| 12 |
2.8 |
5 |
35 |
15 |
0.48 |
70 |
3. Порядок выполнения курсовой работы
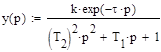
Способ, который применяется в данной работе для расчёта настроек регулятора, основанный на свойствах комплексно-частотной характеристики, расширенной по показателям колебания. Поэтому вычисления проводятся в частотной области, т.е. путём перехода от передаточных к частотным функциям. Конечный результат –  , поэтому для сопоставления одного из показателей качества – первого динамического отклонения , поэтому для сопоставления одного из показателей качества – первого динамического отклонения  с конечным отклонением на неуправляемом объекте при одинаковом возбуждении с конечным отклонением на неуправляемом объекте при одинаковом возбуждении  необходимо иметь передаточную функцию объекта, которая может быть дана в виде кривой разгона. необходимо иметь передаточную функцию объекта, которая может быть дана в виде кривой разгона.
3.1 Определение передаточной функции объекта управления
Результаты математического описания действующего объекта управления, который создаётся, наиболее часто представлены в виде дифференциального уравнения. Для теплоэнергетики характерны объекты, которые имеют инерционность и запаздывание, поэтому их дифференциальные уравнения могут иметь вид
 (1) (1)
где t– независимая переменная (время);
 – выходная координата (регулируемая величина); – выходная координата (регулируемая величина);
– входная координата (воздействие, которое вызывает возмущение);
 – транспортное запаздывание (время); – транспортное запаздывание (время);
a0
,a1
,a2
,b0
– параметры (коэффициенты) уравнения.
При рационализации записи (1) путём деления на коэффициент a0
получают
 (2) (2)
где  – постоянная времени, характеризующая колебательные возможности объекта; – постоянная времени, характеризующая колебательные возможности объекта;
 – постоянная времени, характеризующая демпфирирующие возможности объекта; – постоянная времени, характеризующая демпфирирующие возможности объекта;
 – коэффициент передачи объекта по каналу возмущения. – коэффициент передачи объекта по каналу возмущения.
Решение дифференциального уравнения (1) удобно выполнять с применением способа операторного преобразования Лапласа. Соответственно передаточная функция объекта по каналу возмущения будет иметь вид
 , (3) , (3)
где S – оператор преобразования Лапласа;
 – передаточная функция звена чистого запаздывания. – передаточная функция звена чистого запаздывания.
Передаточная функция объекта по каналу регулирования может и по инерционным свойствам, и по коэффициенту передачи отличаться от канала возмущения. Однако часто различие заключается только в разных коэффициентах передачи  , тогда , тогда
Реклама

 (4) (4)
Изображение по Лапласу выходной функции объекта можно получить, если «пропустить» через объект  входное воздействие входное воздействие 
 (5) (5)
 (6) (6)
  (7) (7)
и записать изображение выходной функции в виде дроби
 (8) (8)
Для перехода от изображения выходной функции к её оригиналу можно применять метод Хевисайда. Метод заключается в формальном получении оригинала путём нахождения корней знаменателя дроби (4) как характеристического уравнения. Корни подставляют в формулу Хевисайда
 , (9) , (9)
где А(0), А(рi
) – числитель дроби (4);
 – значение преобразованного характеристического уравнения при нулевом корне и первой производной этого же уравнения при i-м корне; – значение преобразованного характеристического уравнения при нулевом корне и первой производной этого же уравнения при i-м корне;
pi
– корни преобразованного характеристического уравнения;
n – общее число корней.
 
 (10) (10)
Если корни характеристического уравнения  , ,  – вещественные и отрицательные, решение (1) следующее: – вещественные и отрицательные, решение (1) следующее:
 (11) (11)
 (12) (12)
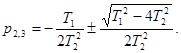
3.2 Расчёт корней характеристического уравнения. Построение кривой разгона
Вычисление корней характеристического уравнения р2
и р3
при р1
=0, а также построение кривой разгона объекта 2-го порядка осуществляется при помощи соответствующих инженерных пакетов программ.


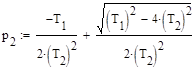

Рисунок 1 Кривая разгона объекта 2-го порядка с запаздыванием
Обработка данной кривой разгона предусматривает проведение касательной в точке перегиба. Далее проводится асимптота – прямая, параллельная оси времени. Кривая разгона имеет характерные точки: К - точка отрыва кривой от оси времени,В – точка пересечения касательной и асимптоты.
Отрезок ОА показывает время полного запаздывания τ, отрезок АС – время разгона Та
.
 с с  с с  с с  с с
где  – чистое запаздывание; – чистое запаздывание;  – емкостное запаздывание. – емкостное запаздывание.
3.3 Теоретическая часть расчёта комплексно-частотной характеристики объекта
Перевод задачи в частотную область совершается путём формальной замены полной комплексной независимой s её чисто комплексной частью 
 (13) (13)
С учётом того, что  , а , а  , запишем , запишем
 (14) (14)
График КЧХ можно построить на плоскости в полярных или прямоугольных координатах. В первом случае запись выражения КЧХ представляется в виде модуля и аргумента комплексного числа

где Моб
 – модуль; – модуль;
 – аргумент. – аргумент.
В другом – в виде действительной и мнимой его частей. Далее (для сокращения) будем писать
 
Поэтому действительную и мнимую чисти КЧХ объекта по каналу регулирования можно определить по формулам
 (15) (15)
  (16) (16)
Действительная и фиктивная части КЧХ являются проекциями модуля на действительную и фиктивную оси комплексной плоскости. Модуль и аргумент КЧХ можно найти по формулам
 (17) (17)
 (18) (18)
3.4 Построение комплексно-частотной характеристики объекта
При расчёте координат для вектора КЧХ необходимы выходные данные – параметры уравнения объекта  Вычисления необходимо провести дважды: для объекта, который имеет запаздывание, и для объекта, который не имеет запаздывание. По результатам построить графики КЧХ при помощи соответствующего инженерного пакета программ. Вычисления необходимо провести дважды: для объекта, который имеет запаздывание, и для объекта, который не имеет запаздывание. По результатам построить графики КЧХ при помощи соответствующего инженерного пакета программ.
T1:=35


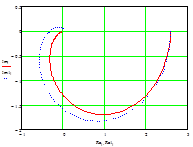
Рисунок 2. КЧХ объекта при наличии запаздывания (1) и отсутствии запаздывания (2).
3.5 Теоретические сведения, требуемые для построения зоны устойчивости АСР
При анализе устойчивости одноконтурной АСР (рис 3), которая включает в себя объект и ПИ-регулятор, в первую очередь необходимо выяснить, в каких пределах можно варьировать параметры его настроек Kp
и Tu
для каждой из возможных частот без риска получить переходный процесс регулирования, который расходится.
То есть в плоскости параметров Kp
и Tu
(удобнее – и и  ) определяется область, внутри которой все комбинации настроек дадут устойчивые затухающие переходные процессы (ПП). ) определяется область, внутри которой все комбинации настроек дадут устойчивые затухающие переходные процессы (ПП).
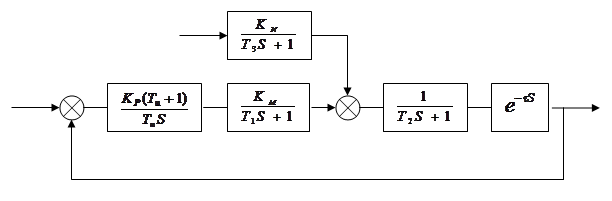
Рисунок 3 Схема одноконтурной АСР, которая включает в себя объект 2-го порядка с запаздыванием и ПИ-регулятор.
Передаточная функция ПИ-регулятора имеет вид:
 (19) (19)
Эквивалентная передаточная функция замкнутой АСР по каналу регулирования
 (20) (20)
Характеристическое уравнение замкнутой АСР
 (21) (21)
Если оценивать устойчивость замкнутой АСР с применением критерия Найквиста-Михайлова, то задачу необходимо перевести в частотную область. Тогда получим
 (22) (22)
где  – действительная часть КЧХ ПИ-регулятора; – действительная часть КЧХ ПИ-регулятора;
 – мнимая часть КЧХ ПИ-регулятора. – мнимая часть КЧХ ПИ-регулятора.
Отсюда можно получить выражения для определения настроек, соответствующих пределам устойчивости АСР
 (23) (23)
Каждому значению круговой частоты отвечает пара значений параметров настроек и .
3.6 Построение зоны устойчивости АСР
Для данной АСР предел области устойчивости должен размещаться в верхней полуплоскости параметров. При увеличении запаздывания плоскость области устойчивости должна резко сокращаться. Построение зоны устойчивости осуществляется при помощи соответствующего инженерного пакета программ.






Рисунок 4. Графическое изображение зоны устойчивости АСР.
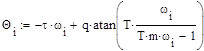
3.7 Теоретические сведения, необходимые для аналитического расчёта оптимальных настроек ПИ-регулятора
Определению подлежат настройки, которые лучше обеспечивают заданную степень колебания (степень затухания) для ПП
где  и и  –соответственно 1-е 3-е динамические отклонения регулированной величины от значения, которое установилось. Эти отклонения определяются непосредственно по графику ПП, но степень затухания может быть определена и другим путём –соответственно 1-е 3-е динамические отклонения регулированной величины от значения, которое установилось. Эти отклонения определяются непосредственно по графику ПП, но степень затухания может быть определена и другим путём
 , (24) , (24)
Корневой показатель колебания, в свою очередь, связана с комплексной плоскостью корней характеристического уравнения АСР; буквально означает модуль отношения действительной части комплексного корня к мнимой. Комплексная плоскость корней уравнения показана на Рисунок 3. С теории автоматического управления известно, что если сопряженные корни характеристического уравнения находятся в левой полуплоскости корней, то ПП имеет затухающую колебательную составляющую. Характеристическое уравнение 3-го порядка может иметь, кроме этого, действительный корень, который тоже должен находиться в левой полуплоскости. Он обуславливает наличие монотонной составляющей в результирующем ПП. Уравнения более высоких порядков могут иметь несколько пар корней, однако значение, которое определяет для результирующего ПП, имеет та пара корней, которая характеризуется н6аименьшим (по модулю) отношением действительной координаты к мнимой
 , (25) , (25)
Все другие корни должны находиться внутри мнимого сектора, образованного началом координат, «опасной», близкой к фиктивной, оси, парой корней (Рисунок3). С изложенного видно, что настройки регулятора на значение коэффициента затухания ПП, который требуется, можно найти, определив для характеристического уравнения АСР граничную пару корней.
Это требование равносильно построению расширенной КЧХ, которая
 (26) (26)
должна быть получена из (3) путём замены S на  ( потому, что корень должен находиться в левой полуплоскости). ( потому, что корень должен находиться в левой полуплоскости).
С учётом (31) можно заменить на  . Для унификации вида ПП значение m условно нормированы, обычно применяются значения 0.22; 0.30; 0.37; 0.48. . Для унификации вида ПП значение m условно нормированы, обычно применяются значения 0.22; 0.30; 0.37; 0.48.
Таким образом для заданного объекта расширенная по m КЧХ;
– корневой показатель колебательности
p2
, p3
– «опасная» пара корней характеристического уравнения 5-го порядка.
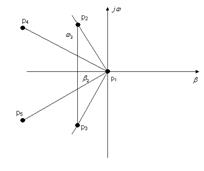
Рисунок 5. Размещение корней характеристического уравнения АСР на комплексной плоскости.
Связь корневой показатель колебательности с корнями уравнения
 (27) (27)
После выполнения преобразований получим для построения расширенной КЧХ:
- по модулю и аргументу

 (28) (28)
- по действительной частью и мнимой

 (29) (29)
Легко заметить, что при m=0 выражения (28) и (29) сводятся к выражениям для обычной КЧХ данного объекта.
Формулы для определения пар настроек на всём диапазоне частот, которые обеспечивают заданное значение степени колебательности, могут быть получены из характеристического уравнения замкнутой АСР (22). Однако вместо составляющих  необходимо подставить в неё соответственно необходимо подставить в неё соответственно 
Эти настройки будут найдены из условия сечения графиком расширенной КЧХ замкнутой системы критической (в смысле критерия Найквиста-Михайлова) точки с координатами (-1,j0), т.е. из условия
 , (30) , (30)

 (31) (31)
Формулы (31) выражаются из формулы (23) при m=0. Необходимые данные (кроме тех, которые применялись на 1-м этапе вычислений) – построение области устойчивости АСР при m=0. Частота, при которой достигается оптимальная настройка регулятора, определяется по виду граничной кривой.
По результатам вычислений в области параметров настроек строится линия m=const, она должна размещаться внутри пределов устойчивости. На ней размещена точка, которая соответствует оптимальным настройкам Kp*
, Tu*
.Важным дополнительным условием для выделения этой точки может служить квадратичный интегральный критерий качества ПП. Он позволяет устранить влияние знака отклонения на общую оценку качества. Расчёт критерия на ЭВМ выполняется по формуле
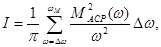 (32) (32)
гдеI – квадратичный критерий качества, ПП;
 – зависимость модуля КЧХ замкнутой АСР от частоты; – зависимость модуля КЧХ замкнутой АСР от частоты;
 – приращение (шаг изменения) частоты. – приращение (шаг изменения) частоты.
Частота, соответствующая минимуму квадратичного критерия, является собственной частью колебаний ПП, а настройки регулятора – оптимальными для достижения заданного значения степени колебательности.
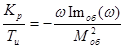
3.8 Построение линии
m
=
const
и определение оптимальных настроек ПИ-регулятора


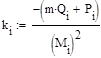
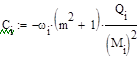
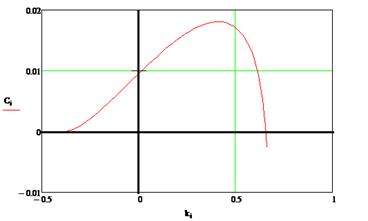
Рисунок 6. Графическое изображение линии m=const.
Следуя теории, максимум построенной кривой – оптимальные настройки ПИ-регулятора. При помощи трассировки нашли следующие значения:
  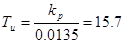 с с
Для наглядности объединим графическое изображение зоны устойчивости и линии m=const (см. Рисунок 7)
Рисунок 7. Графическое изображение зоны устойчивости (2) и линии m=const (1)
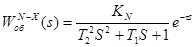
3.9 Теоретические сведения, требуемые для построения КЧХ разомкнутой АСР
Как и раньше, дана КЧХ – Wpc( ) рассчитывается и строится по действительной и мнимой составляющими. ) рассчитывается и строится по действительной и мнимой составляющими.
 (33) (33)
Или с учётом КЧХ ПИ-регулятора
 (34) (34)
Отсюда получим
 (35) (35)
По результатам вычислений необходимо построить график КЧХ и, ориентируясь на критерий Найквиста-Михайлова, определить запас устойчивости АСР по модулю – С и по фазе –  . Изменением значения Kp и Tu можно исследовать влияние настроек регулятора на запасы устойчивости АСР. . Изменением значения Kp и Tu можно исследовать влияние настроек регулятора на запасы устойчивости АСР.
3.10 Построение КЧХ разомкнутой АСР. Определение запаса устойчивости по модулю и фазе
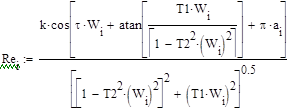
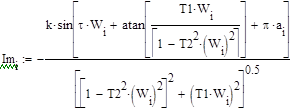
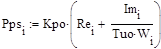
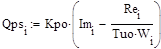
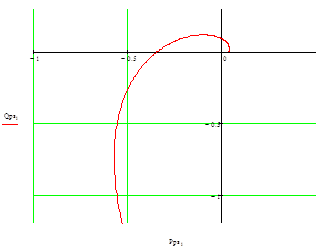
Рисунок 9. Графическое изображение КЧХ разомкнутой АСР
Согласно критерия Найквиста-Михайлова определяем запас устойчивости по модулю (С) и по фазе (g):
C=0.76
g=54
3.11
Теоретические сведения, необходимые для построения действительной части КЧХ замкнутой АСР
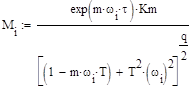
Осуществляя переход от передаточной функции замкнутой АСР к частотной характеристике, получим
 (36) (36)
А разделяя вещественную и действительную её части имеем:

 (37) (37)
В инженерной практике для исследования АСР часто применяется метод Солодовникова, который состоит в близком отображении графика ПП регулирования по графику  . Не исключается достижение того же результата с использованием графика . Не исключается достижение того же результата с использованием графика  . Аналитическая сложность определения ПП связана с необходимостью нахождения интеграла . Аналитическая сложность определения ПП связана с необходимостью нахождения интеграла
 (38) (38)
Владея графиком  , можно заменить его ломаной линией, а после этого каждый наклонный участок ломанной достроить до прямоугольной трапеции (треугольника). Смысл этой операции состоит в том, что для простых трапеций можно табулировать соответствующие им простые гармонические переходные процессы. Такие таблицы так называемых h-функций есть во всех фундаментальных учебниках по ТАУ. Эта операция равносильна переходу от (26) к выражению , можно заменить его ломаной линией, а после этого каждый наклонный участок ломанной достроить до прямоугольной трапеции (треугольника). Смысл этой операции состоит в том, что для простых трапеций можно табулировать соответствующие им простые гармонические переходные процессы. Такие таблицы так называемых h-функций есть во всех фундаментальных учебниках по ТАУ. Эта операция равносильна переходу от (26) к выражению
 (39) (39)
Смысл приведенных величин выясняется с Рисунок (3), где показан график
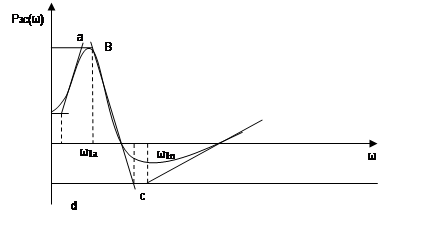
Рисунок 10. График действительной части КЧХ замкнутой АСР
3.12
Построение действительной части КЧХ замкнутой АСР

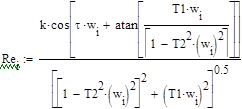
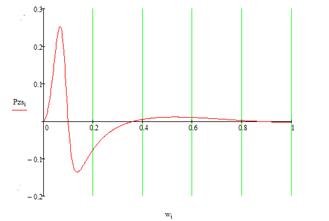
Рисунок 11. График действительной части КЧХ замкнутой АСР.
3.13 Выбор настроек ПИ- регулятора по методу Кона
Метод разработан в 60-е года профессором кафедры АТП Л.И. Коном. Он ориентирован на регулирование многоемкостных тепловых процессов, которые имеют запаздывание.
Отдельной особенностью метода является аппроксимация сложного объекта цепью простых инерционных звеньев 1-го порядка. Таким образом, объект управления идентифицируется моделью с передаточной функцией:
Была построена кривая разгона (см. пункт 3.2.) и обработана, в результате чего найдены величины:
 с с  с с
Определяем соотношение
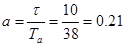
Это даёт возможность применить таблицы приведенных настроек Кона. Таким образом, для  , ,  , ,  оптимально приведенные настройки оптимально приведенные настройки  и и  необходимо брать в строке, соответствующей минимальному значению линейного критерия качества ПП, необходимо брать в строке, соответствующей минимальному значению линейного критерия качества ПП,  , ,  , ,  , ,  , ,  . Отсюда определим оптимальные настройки ПИ-регулятора по методу Кона: . Отсюда определим оптимальные настройки ПИ-регулятора по методу Кона:
Þ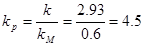
Þ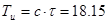 c. c.
3.14 Выбор настроек ПИ- регулятора по методу Копеловича
В предложенном методе принято три типичных переходных процессов регулирования: апериодический (неколебательный), процесс с 20%-м регулированием и процесс с минимальной квадратичной ошибкой  . Для установления соответствия с такими критериями качества ПП, как . Для установления соответствия с такими критериями качества ПП, как  и и  , можно приблизительно вычислить , можно приблизительно вычислить
|
|
Тип ПП регулирования |
| 0,22 |
0,75 |
|
| 0,37 |
0,90 |
20%-е регулирование |
| 0,48 |
0,96 |
апериодический процесс |
Для принятого типичного процесса и ПИ-регулятора номограммы Копеловича позволяют определить по параметру  настройки настройки  и и  . .
Таким образом, для  и и  при помощи одной из номограмм А.П. при помощи одной из номограмм А.П.
Копеловича для апериодического процесса
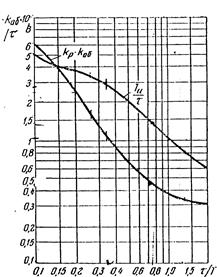
Рисунок 12. Номограмма Копеловича для апериодического процесса найдём  Þ Þ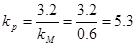
 Þ Þ с. с.
3.15 Сравнение переходных процессов регулирования с оптимальными настройками ПИ-регулятора, полученными различными методами
Рассмотрим влияние оптимальных параметров ПИ-регулятора на переходный процесс регулирования, полученных следующими методами:
1. методом Копеловича   с. с.
2. расчетным (аналитическим) методом по линии m=const=0.48
  с с
3. методом Кона   c. c.
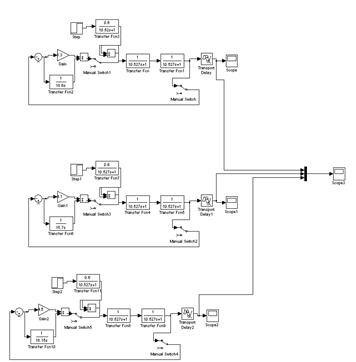
Рисунок 12 Структурная схема АСР для инерционного объекта 2-го порядка с запаздыванием.
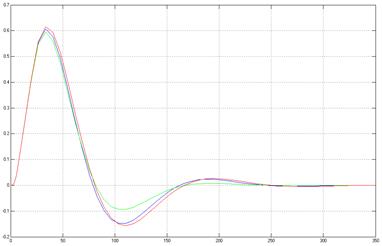
Рисунок 13.
1 – ПП регулирования с настройками ПИ-регулятора, рассчитанными по расширенной КЧХ;
2 – ПП регулирования с настройками ПИ-регулятора, рассчитанными по методу Кона;
3 – ПП регулирования с настройками ПИ-регулятора, рассчитанными по методу Копеловича;
Вывод
:
в даннойкурсовой работе для инерционного объекта управления второго порядка с запаздыванием был выбран ПИ-регулятор. Оптимальные настройки ПИ-регулятора были расчитаны тремя способами: аналитическим методом (при помощи расширенной КЧХ), методом Л.И. Кона, методом Копеловича. Таким образом, получив три переходных процесса регулирования при помощи соответствующего инженерного пакета программ, был проведен сравнительный анализ трёх методов. При выборе настроек по методу Копеловича, первый максимум Δx1
=0.084наименьший, но имеет наибольшее время регулирования tp
=720. Аналитический метод даёт большое Δx1
=0.1, и имеет наименьше время регулирования tp
=600 . Метод Кона дает средний результат: Δx1
=0.097, tp
=655. Учитывая также простоту расчета настроек по методу Кона, данный метод является наиболее удобным в инженерной практике . Также была построена КЧХ разомкнутой АСР, которая позволила найти запас устойчивости по модулю (С=0,76) и по фазе (g= 54 ). В результате были сформированы знания теории линейных одноконтурных автоматических систем регулирования (АСР); закрепились умения применять на практике инженерные способы выбора настроек регулятора и анализа переходных процессов регулирования с использованием ЭВМ, а также приобретены профессиональные знания путём моделирования на ЭВМ, графических построений и сравнительного анализа результатов.
Таблица 2 Сведенная таблица основных результатов курсовой работы
| Способ определения |
Результат |
| Кр
|
Ти
|
m |
Δx1
|
c |
γ |
tP
|
| Вычисления на ЭВМ и граф. построения |
4.1 |
15.7 |
0.48 |
0,1 |
0.76 |
54 |
600 |
| Настройки по Кону |
4.5 |
18.15 |
0.37 |
0,097 |
- |
- |
655 |
| Настройки по Копеловичу |
5.3 |
18.6 |
0.37 |
0,084 |
- |
- |
720 |
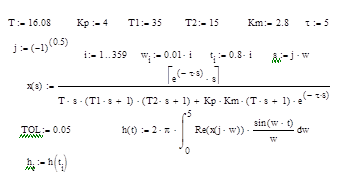
3.16 Аналитическое определение переходного процесса регулирования
Литература
1. Методические указания и таблицы для выбора настроек ПИ– и П – регуляторов в одноконтурных системах регулирования тепловых объектов с запаздыванием. /Л.И.Кон. – Одесса: ОПИ, 1975
2. Климовицкий М.Д., Копелович А.П.. Автоматический контроль и регулирование в чёрной металлургии: Справочник. – М.: Металлургия, 1967.-с.372-378; 417-425.
3. Иващенко Н.Н.. Автоматическое регулирование. – М.: Машиностроение, 1978. – с. 403-420.
4. Стефани Е.П. Основы расчёта настройки регуляторов теплоэнергетических процессов. – М.: Энергия, 1972.-с.198-211; 330-341.
5. Методические указания по методике моделирования на аналоговых вычислительных машинах / Ю.К.Тодорцев, А.Н.Гайдар, В.Г.Килимник – Одесса: ОПИ, 1982.
6. Попович М.Г., Ковальчук О.В.. Теорія автоматичного керування: Підручник для вищих технічних закладів освіти. – К.: Либідь, 1997.
7. Головко Д.Б., Рего К.Т., Скрипник Ю.О.. Автоматика і автоматизація технологічних процесів. – К.: Либідь, 1997.
|