ФГОУ ВПО «Чувашский государственный университет имени И.Н.Ульянова»
Кафедра высшей математики
КУРСОВАЯ РАБОТА
По дисциплине: «Алгебра и геометрия»
На тему: «Приведение поверхностей второго порядка к каноническому виду путём преобразования системы координат»
Выполнил: ст. гр. РТЭ-51-09 Казарин Д.В.
Проверил: доцент Поляков Н.Д.
Чебоксары 2009 Содержание ВВЕДЕНИЕ…………………………………………………………………….3 §1. Прямоугольно-декартовая система координат ………………………….4 1.1 Основные векторы ……………………………………………………..4 1.2 Координаты пространственной точки………………………….……..4 1.3 Координаты вектора…………………………………………...….……6 1.4 Выражение вектора через его проекции ………………………….…..7 1.5 Углы между осями координат и вектором …………………….……...7 §2. Преобразование систем координат …………………………………….....9 Перенос начала координат …………………………………….……….9 2.2 Поворот осей координат ……………………………………………….10 2.3 Общее преобразование …………………………………………………12 §3. Приведение уравнения поверхностей второго порядка в пространстве к каноническому виду ……………………………………14 3.1 Уравнения поверхности второго порядка в пространстве ……….….14 3.2 Канонический вид уравнения поверхности второго порядка в пространстве ………………………………………………. 15 3.3 Приведение к каноническому виду ……………………………….…..15 3.4 Заключение ……………………………………………………………..18 §4. Классификация центральных поверхностей второго порядка….……….19 4.1 Классификация нецентральных поверхностей второго порядка ...….22 §5. Типы поверхностей второго порядка ……………………………………26 5.1 Эллипсоид …………………………………………………………........26 5.2 Однополостный гиперболоид ……………………………….....……....27 5.3 Двуполостный гиперболоид ………………………………….…...…...26 5.4 Конус ………………………………………………………….…………27 5.5 Эллиптическим параболоидом ……………………………….………..31 5.6 Гиперболический параболоид …………………………………………33 5.7 Остальные поверхности второго порядка …………………………….34 Приложение №1.………………………………………………………….…….36 Приложение №2………………………………………………………………...45 ЛИТЕРАТУРА ……………………………………………………………….…52 Введение
Предмет аналитической геометрии заключается в исследовании геометрических форм с помощью алгебраического анализа. В различных разделах элементарной математики , алгебра прилагается к решению многих геометрических вопросов. Числа, определяющие положение геометрической формы, называются её координатами. Способ же, с помощью которого определяется положение геометрической формы, носит название способа или метода координат. Геометрические формы весьма разнообразны, и при построении в аналитической геометрии, мы должны принять одну из множества форм за первичную, с помощью которой мы будем образовывать все остальные. Проще всего за такую начальную форму принять геометрическую точку. Приняв за начальный элемент точку, мы должны показать, каким образом определяется положение точки в пространстве с помощью чисел , так же важно установить, каким образом геометрические свойства линии отражаются на координатах точек, принадлежащих этой линии. Геометрическое место точек называется поверхностью. Так же поверхность можно определить как множество точек , координаты которых удовлетворяют определённому виду уравнений.
§1. Прямоугольно-декартовая система координат Основные векторы. Три взаимно перпендикулярные оси Оx, Оy, Оz (рис. 1.1), проходящие через некоторую точку О, образуют прямоугольную систему координат. Точка О называется началом координат, прямые Оx, Оy, Оz – осями координат (Оx – ось абсцисс, Оy – ось ординат, Оz – аппликат), а плоскости xOy, yOz, zOx – координатными плоскостями. Какой – либо отрезок UV принимается за единицу масштаба для всех трех осей.  Отложив на осях Оx, Оy, Оz в положительном направлении отрезки OA, OB, OC, равные единице масштаба, получаем три вектора Отложив на осях Оx, Оy, Оz в положительном направлении отрезки OA, OB, OC, равные единице масштаба, получаем три вектора  , ,  , ,  , которые называются основными векторами и обозначаются соответственно i, j, k. , которые называются основными векторами и обозначаются соответственно i, j, k. Положительные направления на осях принято выбирать так, чтобы поворот на 90 , совмещающий положительный луч Оx с лучом Оy (рис. 1.1), казался происходящим против часовой стрелки, если наблюдать его со стороны луча Оz. Такая система координат называется правой. Иногда пользуются и левой системой координат. В ней упомянутый поворот совершается по часовой стрелке.
1.2. Координаты пространственной точки Положение любой точки М в пространстве можно определить тремя координатами следующим образом. Через точку М проводим плоскости МР, MQ, MR (рис. 1.2) соответственно параллельные плоскостям yOz , zOx , xOy. В пересечении данных плоскостей с осями координат получаем точки P, G, R .  Числа x (абсцисса), y (ордината), z (аппликата), измеряющие отрезки ОР, OQ, OR в избранном масштабе, называются координатами точки M в прямоугольной системе координат. Они берутся положительными или отрицательными, смотря по тому, имеют ли векторы  , ,  , ,  соответственно те же направления, что и основные векторы i, j, k, или противоположные. соответственно те же направления, что и основные векторы i, j, k, или противоположные. В общем виде положение некоторой точки М в прямоугольной системе координат определяется записью: М(х,у,z) , (1.1) где х, у, z – соответственно абсцисса, ордината и аппликата точки М. Вектор  , идущий от начала координат О к некоторой точке М, называется радиус – вектором точки М и обозначается , идущий от начала координат О к некоторой точке М, называется радиус – вектором точки М и обозначается  , а векторы , , - соответственно проекциями радиус – вектора на соответствующие оси прямоугольной системы координат. Длина радиуса – вектора через координаты некоторой точки М определяется по формуле: , а векторы , , - соответственно проекциями радиус – вектора на соответствующие оси прямоугольной системы координат. Длина радиуса – вектора через координаты некоторой точки М определяется по формуле:  . (1.2) . (1.2)
1.3 Координаты вектора Прямоугольными координатами некоторого вектора mназывают его алгебраические проекции на оси координат. Координаты вектора обозначаются большими буквами X, Y, Z. Вектор m через его проекции на оси координат записывается по форме: m{X, Y,Z} или m={X, Y, Z}. (1.3) Вместо того чтобы проектировать вектор m на оси Ox, Oy, Oz можно проектировать на оси M1A, M1B, M1C (рис. 1.3), проведенные через начало M1 вектора m и равнонаправленные с осями координат.
 Пример 1. Найти координаты вектора m (рис. 1.3) относительно систем координат Oxyz. Через точку M1 проводим оси M1A, M1B, M1C, соответственно равнонаправленные с осями Ox, Oy, Oz, а через точку М2 - плоскости M2P, M2Q, M2R, параллельные координатным плоскостям. Плоскости M2P, M2Q, M2R пересекут оси M1A, M1B, M1C соответственно в точках P, Q, R. Абсцисса X вектора m есть длина вектора M1P, взятая со знаком минус, ордината Y - длина вектора M1Q, взятая со знаком минус, аппликата Z - длина вектора M1R, взятая со знаком плюс. При выбранном масштабе X=-3, Y=-5, Z=3, то есть m{-3,-5,3}.
1.4 Выражение вектора через его проекции Из рис. 1.3 видно, что вектор m равен геометрической сумме векторов: m =  = =  + +  + +  . (1.4) . (1.4) Выразим вектора , , через основные вектора i, j, k. Тогда формула 1.4 примет следующий вид:. m = = Xi + Yj +Zk. (1.5) В примере 1 вектор mчерез его проекции на оси координат: m = -3i + 5j-3k. Длина вектора m вычисляется по формуле: m = | m | =  . (1.6) . (1.6) Если известны координаты начальной и конечной точек М1(х1,у1,z1) и М2(х2,у2,z2), то вектор представляется формулой: m = = (х2-х1)i + (y2-y1)j +(z2-z1)k. (1.7)
1.5 Углы между осями координат и вектором Углы  , ,  , ,  (рис. 1.4), образуемыми положительными направлениями осей Ox, Oy, Oz с вектором m{X, Y,Z} показаны на рис. 1.3 (рис. 1.4), образуемыми положительными направлениями осей Ox, Oy, Oz с вектором m{X, Y,Z} показаны на рис. 1.3  Из прямоугольного треугольника ORM имеем: Из прямоугольного треугольника ORM имеем:  = = = = . (1.8) . (1.8)
Аналогично получаются формулы:  = = = = . (1.9) . (1.9)  = = = = . (1.10) . (1.10) Если вектор r =  имеет длину, равную единице масштаба, то есть | r |=1, то =X, =Y, =Z. имеет длину, равную единице масштаба, то есть | r |=1, то =X, =Y, =Z. При условии | r |=1 из формул (1.8), (1.9), (1.10) следует:  = 1. (1.11) = 1. (1.11) Пример 2. Найти углы, образуемые осями координат с вектором {2, -2, -1}. Решение. ==  =2/3. =-2/3. = -1/3. =2/3. =-2/3. = -1/3. Откуда,  48°11', 131°50', 48°11', 131°50',  109°28', 109°28',
§2. Преобразование систем координат 2.1. Перенос начала координат Пусть задана декартова система координат с осями Ox, Oy, Oz. Рассмотрим новую систему координат с началом в точке О', оси которой O'x', O'y', O'z' соответственно параллельно осям Ox, Oy, Oz и имеют те же направления (рис. 1.5). Масштаб для новой и старой систем координат оставляем одинаковым.  Пусть известны координаты точки О'{a,b,c}. Тогда точка М в старой системе имеет следующие координаты М{a+x', b+y', c+z'). Отсюда: x=x'+a, y=y'+a, z=z'+a , (2.1) где x,y,z и x',y',z' координаты точки М соответственно в старой и новой системах координат. Доказательство этих формул очевидно, так как система осей перемещается параллельно на величину а в направлении Оx, на величину bв направленииOY и на величину c в направлении Oz, то абсциссы всех точек уменьшаются на а, ординаты – на b и аппликаты на с.
2.2 Поворот осей координат Рассмотрим преобразование декартовых прямоугольных координат при таком изменении координатной системы, когда изменяются направление взаимно перпендикулярных осей координат, а начало координат и масштаб остаются неизменными. Пусть Ox, Oy, Oz – старые, Ox', Oy', Oz' – новые координатные оси. Будем считать, что нам известны углы, которые образуют каждая ось новой системы с каждой осью старой. Обозначим на данные углы согласно таблице:
Обозначим через i, j, r и i', j', k' базисные векторы старых и новых осей. Напишем разложение каждого вектора i', j', k' по старому базису:
 (2.2) (2.2) Так как каждый из векторов i', j', k' является единичным, то для каждого из них коэффициентами разложения будут служить направляющие косинусы. Таким образом, вся таблица коэффициентов формул (2.2) определяется следующим равенством:  (2.3) (2.3) которое нужно понимать так:  , ,  и т.д. и т.д. Пусть точка М имеет координаты M{x,y,z} в старой системе координат и M(x', y', z') в новой системе. Тогда имеет векторное равенство: xi + yj + zk= x'i' + y'j' + z'k'. (2.4) Поскольку его правая и левая части представляет собой разложение одного и того же вектора OMв старой и новой системах координат, заменяем векторы по формулам (2.2).  или  (2.5) (2.5) Из формул (2.5) следует:  (2.5) (2.5) Заменяем коэффициенты согласно (2.3) и получаем формулы зависимости старых координат от новых:  (2.6) (2.6) Обратную зависимость новых координат от старых получаем, когда поменяем их ролями и одновременно транспортируя таблицы обозначения и формул (2.3), то есть.  (2.7) (2.7)
2.3 Общее преобразование Прежде всего рассмотрим общие свойства коэффициентов, приведенных в формулах (2.7). 1. Из условия, что векторы являются единичными, следует:  (2.8) (2.8) 2. Из условия, что векторы i', j', k' попарно перпендикулярны друг к другу, следует, что их попарно взятые скалярные произведения должны быть равны нулю:  (2.9) (2.9) 3. Из условия, что тройки векторов i, j, r и i', j', k' обе правые (или левые), следует, что смешанное произведение i'j'k' положительно и равно объему единичного куба, то есть i'j'k'=1. Отсюда:  (2.10) (2.10) 4. Из условия, что тройки векторов i, j, r и i', j', k' ориентированы по разному (одна правая, другая левая) следует, что:  (2.11) (2.11) Из условий 3 и 4 следует, что существует два вида преобразований декартовых прямоугольных координат: сохраняющее ориентацию координатного базиса (2.10) и нарушающее ее (2.11). Из условий 1 и 2 следует, что соотношения (2.8) и (2.9) являются не только необходимыми, но и достаточными условиями того, что формулы (2.5) выражают преобразование прямоугольных координат с неизменным масштабом. Если начало координат переносится в точку O'{a,b,c} одновременно меняется направление осей, то координаты преобразуются по формулам:  (2.12) (2.12) где коэффициенты l1, l2, … , n3 определяется согласно (2.3).
§3. Приведение к каноническому виду уравнения поверхностей второго порядка в пространстве
3.1. Уравнение поверхности второго порядка в пространстве Поверхность второго порядка - геометрическое место точек, декартовы прямоугольные координаты которых удовлетворяют уравнению вида: a11x2+a22y2+a33z2+2a12xy+2a13xz+2a23yz+2a14x+2a24y+2a34x+a44=0 (3.1) в котором по крайней мере один из коэффициентов a11 , а22 , a33 , a12 , a23 , a13 отличен от нуля. Уравнение (3.1) мы будем называть общим уравнением поверхности второго порядка.  Очевидно, поверхность второго порядка, рассматриваемая как геометрический объект, не меняется, если от данной декартовой прямоугольной системы координат перейти к другой декартовой системе координат. Отметим, что исходное уравнение (3.1) и уравнение, полученное после преобразования координат, алгебраически эквивалентны. Очевидно, поверхность второго порядка, рассматриваемая как геометрический объект, не меняется, если от данной декартовой прямоугольной системы координат перейти к другой декартовой системе координат. Отметим, что исходное уравнение (3.1) и уравнение, полученное после преобразования координат, алгебраически эквивалентны. Справедливо следующее утверждение: являются инвариантами уравнения (3.1) поверхности второго-порядка относительно преобразований декартовой системы координат. Коэффициентами уравнения (3.1) являются числа a11, a22, …, a12, …, a44. Причина постановки множителя 2 при некоторых коэффициентах описана тождеством: a11x2+a22y2+a33z2+2a12xy+2a13xz+2a23yz+2a14x+2a24y+2a34z+a44=  (3.2) (3.2) Отсюда видно, что члены левой части с 4 по 10 естественным образом состоят из двух одинаковых экземпляров каждый. Пусть задана поверхность второго порядка неполным уравнением второго порядка следующего вида: a11x2+a22y2+a33z2+2a12xy+2a13xz+2a23yz=H (3.3) Уравнение является неполным, так как в левой части отсутствуют члены первой степени. Ввиду этого левая часть не меняется при замене x, y, z на –x, -y, -z. Это означает, что каждая точка поверхности M{x,y,z) имеет свою симметричную точку M{-x,-y,-z}. Таким образом, поверхность, описанная формулой (3.3), обладает центром симметрии, совпадающим центром системы координат.
3.2. Канонический вид уравнения поверхности второго порядка в пространстве Левая часть тождества (3.3) представляет собой однородный многочлен второй степени, который называется квадратичной формой от трех переменных x, y, z. Сущность задачи приведения квадратичной формы к каноническому виду состоит в следующем: необходимо повернут систему координатных осей таким образом, чтобы после приведения формы (3.3) к новым прямоугольным координатам исчезли все члены с произведениями новых текущих координат при соблюдении условий (2.8), (2.9), (2.10), то есть должно выполняться тождество:  (3.4) (3.4) Левая часть тождества называется каноническим видом уравнения поверхности второго порядка в пространстве. Надо доказать, что каждое уравнение можно привести к каноническому виду. Это означает, нам необходимо найти коэффициенты формулы (2.5).
3.3. Приведение к каноническому виду Предположим, что коэффициенты формул (2.5) уже найдены и тождество (3.4) достигнуто. Перепишем форму (3.4):  (3.5) (3.5) Каждую из скобок в левой части преобразуем по формулам (2.5):  (3.6) (3.6)  (3.7) (3.7)  (3.8) (3.8) Произведения текущих координат правой части формулы (3.5) используя формул (2.7) перепишем:  (3.9) (3.9) Подставим формулы с (3.6) по (3.9) в тождество (3.5). В левой и правой частях тождества получаем по девять различных членов. Тождество будет обеспечено, если коэффициенты подобных членов слева и справа окажутся равными:  (3.10) (3.10)  (3.11) (3.11)  (3.12) (3.12) Решение задачи сводится к решению системы тождеств:  (3.13) (3.13) Задача будет завершена, если найдутся три решения  , ,  , ,  системы (3.13) при выполнении условий (2.8), (2.9), (2.10). системы (3.13) при выполнении условий (2.8), (2.9), (2.10). Преобразуем систему (3.13) к следующему виду:  (3.14) (3.14) Отсюда получаем  (3.15) (3.15) Уравнение (3.15) называется характеристическим уравнением квадратичной формы (3.3). Уравнение (3.15) есть уравнение третьей степени. Доказано, что оно имеет вещественные корни:  , ,  , ,  , которые называются характеристическими числами. Подставляя вещественные корни в систему (3.14) будем иметь ненулевое решение l, m, n., Направление вектора , которые называются характеристическими числами. Подставляя вещественные корни в систему (3.14) будем иметь ненулевое решение l, m, n., Направление вектора  называется главным направлением данной квадратичной формы, соответствующим характеристическому числу. .На практике вектор главного направления приводят к нормированному виду: l1= называется главным направлением данной квадратичной формы, соответствующим характеристическому числу. .На практике вектор главного направления приводят к нормированному виду: l1= , m1= , m1= , n1= , n1= , где: , где:  При этом условии  =1. =1. 3.5 Заключение Каждую квадратичную форму можно привести к каноническому виду при помощи преобразования прямоугольных координат. Чтобы привести данную квадратичную форму к каноническому виду необходимо решить уравнение третьей степени (3.15) и найти характеристические числа , , , которые и будут коэффициентами в канонической виде формы. Координатные оси следует направлять по главным направлениям формы. Если оси абсцисс, ординат и аппликат направления по первому, второму и третьему главным направлениям, то характеристические числа , , будут коэффициентами соответственно при квадрате абсциссы, при квадрате ординаты и при квадрате аппликаты.
§4. Классификация центральных поверхностей второго порядка Пусть S — центральная поверхность второго порядка. Перенесем начало координат в центр этой поверхности, а затем произведем стандартное упрощение уравнения этой поверхности. В результате указанных операций уравнение поверхности примет вид a11х2 + а22у2 + a33z2 + а44 = 0 (4.2) Так как инвариант I3 для центральной поверхности отличен от ноля и его значение, вычисленное для уравнения (4.2) , равно a11 • а22 • a33 , то коэффициенты a11 ,а22 , a33 удовлетворяют условию :  Возможны следующие случаи : Возможны следующие случаи : 1°). Коэффициенты a11 ,а22 , a33 одного знака, а коэффициент а44 отличен от нуля. В этом случае поверхность S называется эллипсоидом. Если коэффициенты a11 ,а22 , a33 , а44 одного знака, то левая часть (4.2) ни при каких значениях х, у, z не обращается в нуль, т. е. уравнению поверхности S не удовлетворяют координаты никакой точки. В этом случае поверхность S называется мнимым эллипсоидом. Если знак коэффициентов a11 ,а22 , a33 противоположен знаку коэффициента а44 , то поверхность S называется вещественным эллипсоидом. В дальнейшем термином «эллипсоид» мы будем называть лишь вещественный эллипсоид. Обычно уравнение эллипсоида записывают в канонической форме. Очевидно, числа  положительны. Обозначим эти числа соответственно а2, b2, с2. После несложных преобразований уравнение эллипсоида (4.2) можно записать в следующей форме:  Уравнение (4.3) называется каноническим уравнением эллипсоида. Если эллипсоид задан своим каноническим уравнением (4.3), то оси Ох, Оу и Оz. называются его главными осями. 2°). Из четырех коэффициентов a11 ,а22 , a33 , а44 два одного знака, а два других—противоположного. В этом случае поверхность S называется однополостным гиперболоидом. Обычно уравнение однополостного гиперболоида записывают в канонической форме. Пусть, ради определенности, a11 > 0, а22 > 0, a33 < 0, а44 < 0. Тогда числа  положительны. Обозначим эти числа соответственно а2, b2, с2. После несложных преобразований уравнение (4.2) однополостного гиперболоида можно записать в следующей форме:  Уравнение (4.4) называется каноническим уравнением однополостного гиперболоида. Если однополостный гиперболоид задан своим каноническим уравнением (4.4), то оси Ох, Оу и Oz называются его главными осями. 3°). Знак одного из первых трех коэффициентов a11 ,а22 , a33 , а44 противоположен знаку остальных коэффициентов. В этом случае поверхность S называется двуполостным гиперболоидом. Запишем уравнение двуполостного гиперболоида в канонической форме. Пусть, ради определенности, a11 < 0, а22 < 0, a33 > 0, а44 < 0. Тогда :  Обозначим эти числа соответственно через a2, b2, с2. Поcли несложных преобразований уравнение (4.2) двуполостного гиперболоида можно записать в следующей форме:  (4.5) (4.5) Уравнение (4.5) называется каноническим уравнением двуполостного гиперболоида. Если двуполостный гиперболоид задан своим каноническим уравнением, то оси Ох, Оу и Оz называются его главными осями. 4°). Коэффициент а44 равен нулю. В этом случае поверхность S называется конусом второго порядка. Если коэффициенты a11 , а22 , a33 одного знака, то левая часть (4.2) обращается в нуль (а44 = 0) лишь для х=у=z=0, т. е. уравнению поверхности S удовлетворяют координаты только едной точки. В этом случае поверхность S называется мнимым конусом второго порядка. Если коэффициенты a11 , а22 , a33 имеют разные знаки, то поверхность S является вещественным конусом второго порядка. Обычно уравнение вещественного конуса второго порядка записывают в канонической форме. Пусть, ради определенности, a11 > o, а22 > 0, a33 < 0. Обозначим  соответственно через а2, b2, с2. Тогда уравнение (4.2) можно записать в виде  Уравнение (4.6) называется каноническим уравнением вещественного конуса второго порядка. Классификация нецентральных поверхностей второго порядка Пусть S — нецентральная поверхность второго порядка, т. е. поверхность, для которой инвариант I3 равен нулю. Произведем стандартное упрощение уравнения этой поверхности. В результате уравнение поверхности примет вид aґ11хґ2 + аґ22уґ2 + a33zґ2 + 2аґ14 xґ + 2аґ24уґ+2аґ34zґ +аґ44 = 0 (4.7) для системы координат Oxґyґzґ Так как инвариант I3 = 0 и его значение, вычисленное для уравнения (4.7) , равно aґ11 • аґ22 • aґ33 , то один или два из коэффициентов aґ11 , аґ22 , aґ33 равны нулю. В соответствии с этим рассмотрим следующие возможные случаи. 1°). Один из коэффициентов aґ11 , аґ22 , aґ33 равен нулю. Ради определенности будем считать, что aґ33 = 0 (если равен нулю какой-либо другой из указанных коэффициентов, то можно перейти к рассматриваемому  (4.8) (4.8) случаю путем переименования осей координат). Перейдем от координат х', у', z' к новым координатам х, у, z по формулам Подставляя х', у' и z', найденные из (4.8), в левую часть (4.7) и заменяя затем aґ11 на a11 , аґ22 на а22 , аґ34 на p и аґ44 на q , получим следующее уравнение поверхности S в новой системе координат Oxyz :  a11х2 + а22у2 + 2pz + q = 0 (4.9) a11х2 + а22у2 + 2pz + q = 0 (4.9) 1) Пусть р = 0, q = 0. Поверхность S распадается на пару плоскостей При этом, очевидно, эти плоскости будут мнимыми, если знаки a11 и а22 одинаковы, и вещественными, если знаки a11 и а22 различны. 2) Пусть р = 0, q ≠ 0. Уравнение (4.9) принимает вид a11х2 + а22у2 + q = 0 (4.10) Известно, что уравнение (4.10) является уравнением цилиндра с образующими, параллельными оси Оz. При этом если a11 , а22 , q имеют одинаковый знак, то левая часть (4.10) отлична от нуля для любых х и y, т. е. цилиндр будет мнимым. Если же среди коэффициентов a11 , а22 , q имеются коэффициенты разных знаков, то цилиндр будет вещественным. Отметим, что в случае, когда a11 и а22 имеют одинаковые знаки, a q — противоположный, то величины положительны.  Обозначая их соответственно через а2 и b2, мы приведем уравнение (4.10) к виду  Таким образом, в отмеченном случае мы имеем эллиптический цилиндр. В случае, a11 и а22 имеют различные знаки, мы получим гиперболический цилиндр. Легко убедиться, что уравнение гиперболического цилиндра может быть приведено к виду  3) Пусть р≠0. Произведем параллельный перенос системы координат, выбирая новое начало в точке с координатами  (0, 0, ). При этом оставим старые обозначения координат х, у, z. Очевидно, для того чтобы получить уравнение поверхности S в новой системе координат, достаточно заменить в уравнении (4.9)   Получим следующее уравнение: a11х2 + а22у2 + 2pz = 0 (4.13) Уравнение (4.13) определяет так называемые параболоиды. Причем если a11 и а22 имеют одинаковый знак, то параболоид называется эллиптическим. Обычно уравнение эллиптического параболоида записывают в канонической форме:  Уравнение (4.14) легко получается из (4.13). Если a11 и а22 имеют разные знаки, то параболоид называется гиперболическим. Каноническое уравнение гиперболического параболоида имеет вид 
Это уравнение также легко может быть получено из (4.13). 2°). Два из коэффициентов aґ11 , аґ22 , aґ33 равны нулю. Ради определенности будем считать, что aґ11 = 0 и аґ22 = 0 Перейдем от х,', у', z' к. новым координатам х, у, z по формулам :  Подставляя х', у' и z' , найденные из (4.16) в левую часть (4.7) и заменяя затем aґ33 на a33 , aґ14 на р , aґ24 на q и aґ44 на r , получим следующее уравнение поверхности S в новой системе координат Охуz : a33 z2 + 2px + 2qy + r = 0 (4.17)  1) Пусть р=0, q=0. Поверхность S распадается на пару параллельных плоскостей При этом, очевидно, эти плоскости будут мнимыми, если знаки a33 и r одинаковы, и вещественными, если знаки a33 и r различны, причем при r = 0 эти плоскости сливаются в одну. 2) Хотя бы один из коэффициентов р или q отличен от нуля. В этом случае повернем систему координат вокруг оси Oz так, чтобы новая ось абсцисс стала параллельной плоскости 2рх+2qy+r=0. Легко убедиться, что при таком выборе системы координат, при условии сохранения обозначения х, у и z для новых координат точек, уравнение (4.17) примет вид a33 z2 + 2qґy = 0 (4.19) которое является уравнением параболического цилиндра с образующими, параллельными новой оси Ох.
§5. Типы поверхностей второго порядка В теории поверхностей второго порядка классифицируют и изучают различные виды поверхностей. Методом их изучения является так называемый метод сечения: исследуются сечения поверхности плоскостями, параллельными координатным или самими координатными плоскостями, и по виду сечений делается вывод о форме поверхности. Существует семнадцать видов поверхностей второго порядка. Идея классификации поверхностей основана на приведении их уравнений к каноническому виду в результате преобразования системы координат в каноническую. Рассмотрим подробнее шесть основных видов поверхностей второго порядка: эллипсоид, однополостный гиперболоид, двуполостный гиперболоид, конус, эллиптический параболоид и гиперболический параболоид. Эллипсоид  рис.5.1 Эллипсоидом (рис.5.1) называется поверхность второго порядка, которая в канонической системе координат определяется уравнением :  В частности, если a = b = c, то получаем сферу x2 + y2 + z2 = a2 с центром в начале координат и радиусом a. Числа a, b, c называются полуосями эллипсоида. Если все они различны, то эллипсоид называется трехосным. Точки пересечения эллипсоида с осями координат: A1(−a; 0; 0), A2(a; 0; 0), B1(0; −b; 0), B2(0; b; 0), C1(0; 0; −c), C2(0; 0; c) называются его вершинами. Оси канонической системы координат являются осями симметрии эллипсоида, начало координат – его центром симметрии, а координатные плоскости – плоскостями симметрии. Рассмотрим сечение эллипсоида плоскостью xOy: z = 0. Оно задается системой уравнений  и представляет собой эллипс с каноническим уравнением  Рассматривая аналогично сечения эллипсоида координатными плоскостями xOz: y = 0 и yOz: x = 0, а также плоскостями, им параллельными (x = h1, y = h2, z = h3), получаем кривые второго порядка эллиптического типа. Это – либо эллипс (при h1 < a, h2 < b, h3 < c), либо пара мнимых пересекающихся прямых, т.е. точка (при |h1| = a, | h2| = b, | h3| = c), либо мнимый эллипс (при h1 > a, h2 > b, h3 > c).
5.2 Однополостный гиперболоид Однополостным гиперболоидом (рис.5.2) называется поверхность второго порядка, которая в канонической системе координат определяется уравнением:  Оси канонической системы координат являются осями симметрии однополостного гиперболоида, начало координат – его центром симметрии, а координатные плоскости – плоскостями симметрии. Оси абсцисс и ординат пересекают однополостный гиперболоид в точках A1(−a; 0; 0), A2(a; 0; 0), B1(0; −b; 0), B2(0; b; 0), которые называются его вершинами. Ось аппликат Oz, не имеющая с гиперболоидом общих действительных точек, называется его мнимой осью.
 рис.5.2 рис.5.2 Если рассмотреть сечения однополостного гиперболоида плоскостью xOy: z = 0 или плоскостями, параллельными ей (z = h3), то в сечении получаются эллипсы. Эллипс называется горловым. Теперь возьмем сечение однополостного гиперболоида плоскостью xOz: y = 0. Оно задается системой уравнений:  и представляет собой гиперболу с действительной осью Ox:  Рассматривая аналогично сечения гиперболоида плоскостью yOz: x = 0, а также плоскостями, параллельными плоскостям xOz: y = h2 и yOz: x = h1, получаем кривые второго порядка гиперболического типа. Это – либо гипербола (при |h1| ≠ a, | h2| ≠ b), либо пара пересекающихся прямых (при |h1| = a, | h2| = b). Например, сечение однополостного гиперболоида плоскостью x = a задается системой уравнений  и представляет собой пару пересекающихся прямых с каноническим уравнением 
Двуполостный гиперболоид  рис.5.3 рис.5.3 Двуполостным гиперболоидом (рис.5.3) называется поверхность второго порядка, которая в канонической системе координат определяется уравнением:  Ось аппликат Oz канонической системы координат является осью симметрии двуполостного гиперболоида, начало координат – его центром симметрии, а координатные плоскости – плоскостями симметрии. Ось аппликат пересекает гиперболоид в точках C1(0; 0; −c), C2(0; 0; c) которые называются его вершинами. Сама ось аппликат называется действительной осью гиперболоида. Если рассмотреть сечение двуполостного гиперболоида координатными плоскостями xOz: y = 0 и yOz: x = 0, и плоскостями, им параллельными (x = h1, y = h2), то в сечении получаются гиперболы. Рассматривая аналогично сечения гиперболоида плоскостью xOy: z = 0, а также плоскостями, параллельными плоскости xOy: z = h, получаем кривые второго порядка эллиптического типа. Это – либо эллипс (при |h| > c), либо пара мнимых пересекающихся прямых, т.е. точка (при |h = c |), либо мнимый эллипс (при |h| < c). Например, при |h| > c сечение двуполостного гиперболоида плоскостью z = h задается системой уравнений  откуда при подстановке второго уравнения в первое последовательно получаем:  и каноническое уравнение эллипса 
Конус  рис.5.4 рис.5.4 Конус второго порядка (рис. 5.4) в канонической системе координат имеет вид  Эта поверхность второго порядка состоит из прямых, пересекающихся в одной точке – вершине конуса. Действительно, если точка с координатами (x0; y0; z0) удовлетворяет уравнению конуса, то ему удовлетворяют также точки с координатами: x = x0t , y = y0t , z = z0tпри любом значении параметра t. Записанные уравнения являются параметрическими уравнениями прямой, проходящей через начало координат и точку (x0; y0; z0). Конус состоит из таких прямых, называемых образующими конуса. Ось аппликат канонической системы координат называется его осью. Оказывается, плоскость, проходящая через вершину конуса, либо не пересекает его в другой точке, либо пересекает по двум образующим, либо касается вдоль образующей. Любая плоскость, параллельная этим плоскостям, в первом случае пересекает конус по эллипсу, во втором случае – пересекает по гиперболе, в третьем случае – по параболе. Поэтому эллипс, гиперболу, параболу часто называют коническими сечениями.
Эллиптическим параболоидом  рис.5.5 рис.5.5 Эллиптическим параболоидом (рис.5.5) называется поверхность второго порядка, которая в канонической системе координат определяется уравнением:  Ось аппликат Oz канонической системы координат является единственной осью симметрии эллиптического параболоида, плоскости xOz и yOz − плоскостями симметрии. Ось аппликат, называемая осью эллиптического параболоида, пересекает его в начале координат, эта точка называется вершиной параболоида. Если рассмотреть сечение эллиптического параболоида координатными плоскостями xOz: y = 0 и yOz: x = 0, и плоскостями, им параллельными (x = h1, y = h2), то в сечении получаются параболы. Например, сечение эллиптического параболоида плоскостью y = h2 задается системой уравнений:  откуда при подстановке второго уравнения в первое последовательно получаем:  и уравнение параболы  . . Получаемые таким образом параболы лежат в параллельных плоскостях, отличаясь лишь положением в пространстве. Рассматривая аналогично сечения эллиптического параболоида плоскостью xOy: z = 0, а также плоскостями, параллельными плоскости xOy: z = h, получаем кривые второго порядка эллиптического типа. Это – либо эллипс (при h > 0), либо пара мнимых пересекающихся прямых, т.е. точка (при h = 0), либо мнимый эллипс (при h < 0). Гиперболический параболоид  рис.5.6 рис.5.6 Гиперболическим параболоидом (рис.5.6) называется поверхность второго порядка, которая в канонической системе координат определяется уравнением:  Ось аппликат Oz канонической системы координат является единственной осью симметрии гиперболического параболоида, плоскости xOz и yOz − плоскостями симметрии. Ось аппликат, называемая осью гиперболического параболоида, пересекает его в начале координат; эта точка называется вершиной параболоида. Если рассмотреть сечение гиперболического параболоида координатными плоскостями xOz: y = 0 и yOz: x = 0, и плоскостями, им параллельными (x = h1, y = h2), то в сечении получаются параболы. Например, сечение гиперболического параболоида плоскостью x = h1 задается системой уравнений:  откуда при подстановке второго уравнения в первое последовательно получаем:  и уравнение параболы  . . Рассматривая аналогично сечения гиперболического параболоида плоскостью xOy: z = 0, а также плоскостями, параллельными плоскости xOy: z = h, получаем кривые второго порядка гиперболического типа. Это либо гипербола (при |h| > 0), либо пара пересекающихся прямых (при h = 0). Таким образом, по форме гиперболический параболоид напоминает седло, эту поверхность часто называют седловой.
Остальные поверхности второго порядка  
Рис.5.7 Остальные одиннадцать видов поверхностей относятся к классам цилиндрических поверхностей (эллиптический, гиперболический и параболический (рис.5.7) цилиндры); пар плоскостей (пересекающихся, параллельных и совпавших) и мнимых поверхностей (мнимый эллипсоид, мнимый конус, мнимый эллиптический цилиндр, пары мнимых пересекающихся и мнимых параллельных плоскостей). Виды поверхностей и их уравнения приведены в таблице ниже :
Таблица поверхностей второго порядка | № п.п | Вид поверхности | Уравнение | | 1 | Эллипсоид |  | | 2 | Мнимый эллипсоид |  | | 3 | Однополостный гиперболоид |  | | 4 | Двуполостный гиперболоид |  | | 5 | Эллиптический параболоид |  | | 6 | Гиперболический параболоид |  | | 7 | Конус |  | | 8 | Мнимый конус |  | | 9 | Эллиптический цилиндр |  | | 10 | Гиперболический цилиндр |  | | 11 | Параболический цилиндр | Y 2 = 2pX | | 12 | Мнимый эллиптический цилиндр |  | | 13 | Пара мнимых пересекающихся плоскостей |  | | 14 | Пара пересекающихся плоскостей |  | | 15 | Пара параллельных плоскостей | X 2 − a2 = 0 | | 16 | Пара мнимых параллельных плоскостей | X 2 + a2 = 0 | | 17 | Пара совпавших плоскостей | X 2 = 0 |
ПРИЛОЖЕНИE №1 Пример 1. Привести к каноническому виду уравнение поверхности второго порядка: 7x2+6y2+5z2-4xy-4yz-18=0 . Решение. Составим характеристическое уравнение:  или  3+ 182+99-162=0 или (-3)(-8)(-9)=0. Корни уравнения: 1=3, 2=6, 3=9. Каноническое уравнение равно: 3x'2+6y'2+9z'2-18=0, или 3+ 182+99-162=0 или (-3)(-8)(-9)=0. Корни уравнения: 1=3, 2=6, 3=9. Каноническое уравнение равно: 3x'2+6y'2+9z'2-18=0, или  (п.1). (п.1). Данная поверхность является эллипсоидом с полуосями а= . b= . b= , c= , c= . . Пример 2. Найти расположение поверхности эллипсоида, каноническое уравнение которого соответствует формуле (п.1). Решение. Для определения главных направлений поверхности составим систему уравнений:  (п.2) (п.2) Для =1=3 система уравнений примет вид:  В качестве ненулевого решения этой системы можно взять: l=1, m=2, n=2. Нормируя это решение, получим единичный вектор первого главного направления:  Точно так же, в системе (п.2) для =2=6 и =3=9 найдем единичные векторы двух других направлений:   Данные векторы показывают положение новых осей относительно старых, поэтому расположение поверхности известно. Формулы преобразования координат найдем согласно (2.5):  Пример 3. Привести к каноническому виду уравнение поверхности второго порядка:  Решение. Составим характеристическое уравнение:  или 3-27+-54=0 или (+3)(+3)(-6)=0. Корни уравнения: 1=-3, 2=-3, 3=6. Каноническое уравнение равно: -3x'2-3y'2+6z'2+6=0, или  Данная поверхность является однополостным гиперболоидом вращения с полуосями а=. b=, c=1.
Пример 4. Привести к простейшему виду уравнение  Решение. Соберем члены уравнения, содержащие одну и ту же переменную величину, и получим :  Из второй скобки вынесем коэффициент при  , после чего предыдущее уравнение примет вид: , после чего предыдущее уравнение примет вид:  В каждой из скобок выделим полный квадрат и получим:  или  откуда следует , что  Произведем теперь такую замену: положим, что  Произведенная замена представляет собой не что иное, как преобразование координат всех точек плоскости параллельным переносом координатных осей без изменения их направления. Сравнение последних соотношений с формулами  показывает, что новое начало координат находится в точке а уравнение A принимает вид: а уравнение A принимает вид:  Разделив обе части этого уравнения на  , получим канонический (простейший) вид данного уравнения: , получим канонический (простейший) вид данного уравнения:  Заданное уравнение определяет эллипс с полуосями a= , b= , b= , центр которого находится в первоначальной системе координат в точке . Таким образом, упрощение уравнения этой линии достигнуто параллельным переносом начала координат в ее центр. , центр которого находится в первоначальной системе координат в точке . Таким образом, упрощение уравнения этой линии достигнуто параллельным переносом начала координат в ее центр.
Пример 5. Дана поверхность второго порядка 
Определить вид этой поверхности ,доказать , что она является поверхностью вращения , написать её каноническое уравнение. Решение. Имеем  , ,  . .
Поверхность невырожденная центральная. Характеристическое уравнение имеет вид :  или  . Так как . Так как  и среди корней характеристического уравнения имеются как положительные, так и отрицательные (согласно правилу Декарта один корень положительный и два отрицательных), то поверхность – однополостный гиперболоид. и среди корней характеристического уравнения имеются как положительные, так и отрицательные (согласно правилу Декарта один корень положительный и два отрицательных), то поверхность – однополостный гиперболоид. Для того чтобы поверхность второго порядка была поверхностью вращения , необходимо и достаточно, что бы её характеристическое уравнение имело кратный корень, для чего в свою очередь необходимо и достаточно, чтобы корень характеристического многочлена был в то же время и корнем его производной. Производная характеристического многочлена:  Корни производной  . Подвергаем проверке только один корень -3, т.к у характеристического многочлена только один положительный корень. Действительно , . Подвергаем проверке только один корень -3, т.к у характеристического многочлена только один положительный корень. Действительно ,  , , оказывается корнем характеристического многочлена, поэтому можно положить
 ; ;
по теореме Виета найдем, что  . . Приведённое уравнение поверхности:  . . Каноническое уравнение поверхности : 
Пример 6. Нарисуйте поверхность  Решение. Выделим полные квадраты по переменным x , y и z :  Отсюда  Разделим обе части на 4:  Введем новую систему координат с началом в точке  , получающуюся из старой параллельным переносом. По предложению 13.1 получим, что в новой системе поверхность задается уравнением , получающуюся из старой параллельным переносом. По предложению 13.1 получим, что в новой системе поверхность задается уравнением  Данное уравнение отличается от канонического уравнения однополостного гиперболоида тем, что поменялись ролями оси ординат (  ) и аппликат ( ) и аппликат ( ). Не переобозначая осей, произведем построение поверхности с помощью сечений. В сечении плоскостью ). Не переобозначая осей, произведем построение поверхности с помощью сечений. В сечении плоскостью  получаем эллипс с уравнением получаем эллипс с уравнением  Его полуоси равны 1 и 2 и лежат соответственно на осях  и . В сечении плоскостью и . В сечении плоскостью  получаем гиперболу с уравнением получаем гиперболу с уравнением  Ее мнимая ось лежит на оси , а действительная ось лежит на оси , полуоси соответственно равны 2 и 1. В сечении плоскостью  получаем равностороннюю гиперболу с уравнением получаем равностороннюю гиперболу с уравнением  Ее мнимая ось лежит на оси , а действительная ось лежит на оси , обе полуоси равны 2. Для большей наглядности нарисуем еще два сечения плоскостями параллельными плоскости . В сечениях получим эллипсы, подобные эллипсу в плоскости . По рассмотренным сечениям можно представить себе форму гиперболоида и его расположение в пространстве (рис. 5.1). Объемное изображение приведено на рис 5.2   Пример 7. Какую поверхность определяет уравнение  ? ? Решение : Установим форму поверхности с помощью метода параллельных сечений. Сначала пересечём поверхность с плоскостью y=0:  получим получим  =4z. Это уравнение параболы в плоскости Oxz. Пересечём поверхность плоскостью x=0 : =4z. Это уравнение параболы в плоскости Oxz. Пересечём поверхность плоскостью x=0 :  получим получим  .Сечением является парабола . В результате пересечения поверхности плоскостью z=0 : .Сечением является парабола . В результате пересечения поверхности плоскостью z=0 :  получим пару пересекающихся прямых получим пару пересекающихся прямых  . Сечения поверхности плоскостями x=h дают параболы : . Сечения поверхности плоскостями x=h дают параболы :  при h>0 действительная ось гиперболы параллельна оси Ox , а при h<0 – оси Oy . По виду полученных сечений можно заметить , что исследуемая поверхность – гиперболический параболоид. при h>0 действительная ось гиперболы параллельна оси Ox , а при h<0 – оси Oy . По виду полученных сечений можно заметить , что исследуемая поверхность – гиперболический параболоид.
Пример 8. Привести уравнение данной поверхности к каноническому виду и определить её тип  Решение. 1) Применяя метод выделения полных квадратов , приведем уравнение к каноническому виду: 
2) Выделим полный квадрат в данном уравнении  при переменной z: при переменной z:  или или  Данная поверхность является параболическим цилиндром. При параллельном переносе осей координат по формулам  Получим каноническое уравнение поверхности  . Точка . Точка  служит началом новой системы координат. служит началом новой системы координат.
3)Перепишем исходное уравнение в виде :  . . Получим уравнение эллиптического параболоида с вершиной в точке  . .
ПРИЛОЖЕНИЕ №2 Задание 1.10 Даны уравнения одной из сторон ромба x-3y+10=0 и одной из его диагоналей x+4y-4=0 , диагонали ромба пересекаются в точке (0;1) . Найти уравнение остальных сторон ромба. Решение : 1) Найдём координаты вершины А ромба , пересечение стороны x-3y+10=0 и диагонали x+4y-4=0 : x-3y+10=x+4y-4 7y=14 y=2 cследовательно x=-4 –> координаты вершины ромба А(-4;2) 2)Через точку пересечения диагоналей (0;1) , найдём противоположную вершину С(4;0) 3)Найдём уравнение второй диагонали , т.к диагонали в ромбе перпендикулярны следовательно угловые коэффициенты соотносятся как  . Преобразованное уравнение первой диагонали имеет вид . Преобразованное уравнение первой диагонали имеет вид  . Следовательно уравнение второй диагонали будет иметь вид: y=4x+p т.к противоположные стороны в ромбе параллельны , подставим координаты точки пересечения и найдём p. . Следовательно уравнение второй диагонали будет иметь вид: y=4x+p т.к противоположные стороны в ромбе параллельны , подставим координаты точки пересечения и найдём p.
1=0+p p=1 , следовательно уравнение второй диагонали имеет вид y=4x+1. 4)Найдём вершину В , пересечения второй диагонали y=4x+1 и стороны x-3y+10=0 . Для этого прировняем их : x-3y+10=4x-y+1 x-3y+10=12x-3y+3  , следовательно y = , следовательно y =  , отсюда получаем координаты вершины В( , отсюда получаем координаты вершины В( ) )
5)Определим уравнение ВС по формуле прямой проходящей через две точки  , получим , получим  . .
6)Определим уравнение DC : x-3y+b=0 . Поставим координаты точки С и найдём b : b=-4 . Следовательно уравнение DC : x-3y-4=0 7)Определим уравнение AD :  , подставим координаты точки А. Получим , подставим координаты точки А. Получим  . Следовательно уравнение AD : . Следовательно уравнение AD :  Ответ : AB: x-3y+10=0 DC: x-3y-4=0 AD: BC: 
Задание 2.10 Даны координаты вершин треугольника АВС. Найти длины медианы, высоты , проведённых из вершины А. Вычислить внутренний угол при вершине В. A(8;0) , B(-4;-5) , C(-8;-2) Решение : 1)Определим координаты точки М отрезка АМ(медиана) , получаем М и определим длину медианы как длину вектора : и определим длину медианы как длину вектора :  . .
2)Что бы найти AH(высота) , определим уравнение прямой CB: CB:  . Теперь определим расстояние от точки А до найденной прямой по формуле : . Теперь определим расстояние от точки А до найденной прямой по формуле :  . После вычислений получаем . После вычислений получаем  . Следовательно AH= . Следовательно AH= . . 3)Определим BH по теореме Пифагора : BH= Тогда  , отсюда следует что угол при вершине B приблизительно равен , отсюда следует что угол при вершине B приблизительно равен  . . Ответ : Медиана =  Высота = Угол при вершине B  
Задание 4.10 Найти точки пересечения кривой второго порядка  с прямой а. с прямой а.  
а :  Решение : 1)Составим и решим систему уравнений : 

Ответ : точек пересечения кривой второго порядка с прямой а не существует. 
Задание 7.10 Для векторов  , заданных в ортонормированном базисе , заданных в ортонормированном базисе  найдите : найдите : 1) Направляющие косинусы вектора  ; ; 2) Площадь параллелограмма , построенного на векторах и  , имеющих общее начало; , имеющих общее начало; 3)Объем пирамиды, построенной на векторах ,  и , имеющих общее начало. и , имеющих общее начало. (2;1;0) , (4;3;-3), (-6;5;7) Решение : 1) 

2) 
3)  

Ответ :       = =   = =  Задание 12.10 Найти точки пересечения поверхности и прямой  
Решение : 1) Найдём точку пересечения двух прямых: x-z-2=7x+8y-z-2 7x-7z-14=7x+8y-z-2 -6z-12=8y  , отсюда следует x=2+z , отсюда следует x=2+z
2)Подставим полученные значения x и y в уравнение поверхности второго порядка , что бы найти точки их пересечения.  , после решения данного уравнения поулчаем точку пересечения двух прямых и поверхности второго порядка . , после решения данного уравнения поулчаем точку пересечения двух прямых и поверхности второго порядка .
x=4 ; y=-3 ; z=2 Ответ : Поверхность пересекается с прямой в точке (4;-3;2)
Литература
1. Александров П.С. Лекции по аналитической геометрии / П.С. Александров. – М.: Наука, 1968. 2. Атанасян Л.С. Геометрия / Л.С. Атанасян. – М.: Просвещение, 1973. Ч.1. 3. Атанасян Л.С. Геометрия / Л.С. Атанасян. – М.: Просвещение, 1987. Ч.2. 4. Базылев В.Т. Геометрия /В.Т. Базылев, К.И. Дуничев, В.П. Иваницкая. – Ь.,1974. Ч.1. 5. Ефимов Н.В. Квадратичные формы и матрицы / Н.В. Ефимов. – М.: Наука, 1967. 6. Парнасский И.В. Многомерные пространства. Квадратичные формы и квадратики / И.В. Парнасский, О.Е. Парнасская. – М.: Просвещение, 1978. 7. Погорелов А.В. Аналитическая геометрия /А.В. Погорелов. – М.: Наука, 1968. 53
Министерство образования и науки Российской федерации Федеральное государственное образовательное учреждение высшего профессионального образования «Чувашский государственный университет им. И.Н. Ульянова»
Кафедра высшей математики
Курсовая работа
«Приведение поверхности второго порядка к каноническому виду путем преобразования систем координат »
Выполнил: студент I курса
Проверил: кандидат физико- математических наук, старший преподаватель Ильина И.И.
Чебоксары 2007 Содержание:
Введение…………………………………………………………………………...3 Глава I. Прямоугольно - декартовая система координат………………..…....4 §1. Общая декартова и декартова прямоугольная системы координат на плоскости…………………………………………………………………………..4§2. Общая декартова и декартова прямоугольная системы координат в пространстве………………………………………………………………………5 Глава II. Преобразование систем координат …..…………………………..…..9 §1. Перенесение начала…………………………………………………………...9 §2. Изменение координатных векторов………………………………………...10 §3. Общий случай………………………………………………………………..11 Глава III. Приведение к каноническому виду уравнения поверхностей второго порядка в пространстве………………………………………………..15 Глава IV. Типы поверхностей второго порядка………………………………21 Заключение……………………………………………………………………….24 Список использованной литературы…………………………………………...25 Приложение 1…………………………………………………………………….26 Приложение 2…………………………………………………………………….30
Введение
В данной курсовой работе рассмотрена тема “Приведение поверхности второго порядка к каноническому виду путем преобразования систем координат”. Работа состоит из теоретической и практической частей. В теоретической части курсовой работы представлены четыре главы. В первой главе описана прямоугольно- декартовая система координат. Следующая глава раскрывает способы преобразования систем координат. В третьей главе рассмотрено приведение к каноническому виду уравнения поверхностей второго порядка в пространстве. А в четвёртой — приведены типы поверхностей второго порядка. Практическая часть курсовой работы содержит 10 задач: 5 задач по типовому расчёту и 5 по теории.
Глава I. Прямоугольно - декартовая система координат. §1. Общая декартова и декартова прямоугольная системы координат на плоскости Общей декартовой (или аффинной) системой координат на плоскости называется упорядоченная совокупность двух пересекающихся осей координат с общим началом координат О на каждой из них (рис. 1.1). Масштабные отрезки этих осей могут быть различны. Первая ось называется осью Ох, или осью абсцисс, вторая—осью Оу, или осью ординат. Пусть М—произвольная точка плоскости. Пусть Р— проекция точки М на ось Ох параллельно оси Оу, а x — координата точки Р на оси Ox; Q — проекция точки М на ось Оу параллельно оси Ох, а у —координата точки Q на оси Оу. Числа х, у называются общими декартовыми (или аффинными) координатами точки М. Первая координата х называется абсциссой точки М, вторая координата у называется ординатой точки М. Точка М с координатами х, у обозначается М (х, у). Абсцисса точки М равна нулю тогда и только тогда, когда точка М лежит на оси Оу; ордината, у точки М равна нулю тогда и только тогда, когда точка М лежит на оси Ох. Для начала координат О (и только для этой точки) обе координаты х и у равны нулю. Точки E1(1, 0) и Е2(0, 1) называются единичными точками осей координат; точка Е(1, 1) называется единичной точкой системы координат, параллелограмм OE1EE2— масштабным параллелограммом. Отрезки ОЕ1 и ОЕ2 являются масштабными отрезками соответственно осей Ох и Оу. Векторы  и и  называются масштабными векторами соответственно осей Ох и Оу. Общую декартову систему координат на плоскости можно задать упорядоченной парой пересекающихся прямых и единичной точкой Е, не лежащей ни на одной из них. В самом деле, пусть О — точка, в которой пересекаются эти прямые, Е1 — про-екция точки E на первую из данных прямых параллельно второй, а E2— проекция точки E на вторую прямую параллельно первой. Тогда положительные направления прямых определяются направлениями векторов  и и  , отрезки ОЕ1 и 0Е2 — масштабные отрезки соответственно для первой и второй осей координат. , отрезки ОЕ1 и 0Е2 — масштабные отрезки соответственно для первой и второй осей координат. При помощи общей декартовой системы координат на плоскости устанавливается взаимно однозначное соответствие между множеством всех точек плоскости и множеством всех упорядоченных пар действительных чисел, так как: каждой точке M плоскости соответствует одна определенная упорядоченная пара действительных чисел x, у— координат этой точки; каждая упорядоченная пара х, у действительных чисел ставится в соответствие одной и только одной точке М, для которой первое число х —абсцисса, а второе число — у ордината. Для построения этой точки М в случае  , , надо построить на оси Ox точку Р с координатой х, а на оси Оу —точку Q с координатой у. Точка М является точкой пересечения прямых, проходящих через точки Р и Q, параллельных надо построить на оси Ox точку Р с координатой х, а на оси Оу —точку Q с координатой у. Точка М является точкой пересечения прямых, проходящих через точки Р и Q, параллельных соответственно осям Оу и Ох. Если у = 0 или х = 0, то дело сводится к построению точки на оси Ох на оси Оу. Декартовой прямоугольной система координат на плоскости называется упорядоченная совокупность двух взаимно перпендикулярных осей координат с равными масштабными отрезками ОЕ1=ОЕ2 и с общим началом координат О на каждой оси (рис. 1.2) Определение декартовых прямоугольных координат точки формулируется аналогично соответствующему определению общих декартовых координат точки: пусть Р и Q—ортогональные проекции точки М соответственно на оси Ох и Оу, х—координата точки Р на оси Ох, а у — координата точки Q на оси Оу. Числа х, у называются декартовыми прямоугольными координатами точки М. Отметим, что часто масштабные векторы осей Ох и Оу в декартовой прямоугольной системе координат обозначают так:   и и  
Рис. 1.1. Декартовая система координат Рис. 1.2. Оси координат §2. Общая декартова и декартова прямоугольная системы координат в пространстве Общей декартовой ( или аффинной ) системой координат в пространстве называется упорядоченная совокупность трех осей координат, не лежащих в одной плоскости и проходящих через одну точку О, являющуюся началом координат на каждой оси. Масштабные отрезки осей координат, вообще говоря, различны (рис. 1.3). Точка О называется началом координат. Первая ось называется осью Ох, или осью абсцисс, вторая—осью Оу, или осью ординат, третья—осью Oz, или осью аппликат. Плоскость, проходящая через две оси из трех Ох, Оу, Oz, называется координатной плоскостью; координатных плоскостей три; они обозначаются так: Oyz, Oxz и Оху. Пусть М — произвольная точка пространства. Обозначим через Р проекцию точки М на ось Ох параллельно плоскости yOz, a через х — координату точки Р на оси Ох. Через Q обозначим проекцию точки М на ось Оу параллельно плоскости zOx, а через у — координату точки Q на оси Оу. Через R обозначим проекцию точки М на ось Oz параллельно плоскости хОу, а через z— координату точки R на оси Oz (рис. 1.4). Три числа х, у, z, взятые в этом порядке, называются общими декартовыми координатами точки М. Первая координата х называется абсциссой точки М, вторая у—ординатой точки М, третья z—аппликатой точки М. Точка М с координатами х, у, z обозначается М (х, у, z). Абсцисса точки М равна нулю тогда и только тогда, когда точка М лежит на координатной плоскости yOz. Ордината точки М равна нулю тогда и только тогда, когда точка М лежит на координатной плоскости zOx. Аппликата точки М равна нулю тогда и только тогда, когда точка М лежит на координатной плоскости хОу. Отсюда следует, что точка М (х, у, z) лежит на оси Ох тогда и только тогда, когда у = z = 0; на оси Оу тогда и только тогда, когда z = х = 0 и на оси Oz тогда и только тогда, когда х = y = 0. Для начала координат (и только для этой точки) все три координаты равны нулю. Точки Е1(1, 0, 0), E2(0, 1, 0), E3(0, 0, 1) называются единичными точками осей координат. Точка E(1, 1, 1) называется единичной точкой системы координат. Параллелепипед с вершиной в начале координат О и с ребрами OE1 ОЕ2, ОЕ3 называется масштабным параллелепипедом. Отрезки OE1 ОЕ2, ОЕ3 являются масштабными отрезками соответственно осей Ox, Oy, Oz. Векторы  , ,  , ,  называются масштабными векторами соответственно осей Ox, Oy, Oz. Общая декартова система координат в пространстве может быть задана упорядоченной тройкой прямых, не лежащих в одной плоскости, и проходящих через одну точку, и единичной точкой Е (не лежащей в одной плоскости ни с какой парой из заданных прямых). В самом деле, проектируя единичную точку Е на каждую из заданных прямых параллельно плоскости, содержащей две другие прямые, мы построим единичные точки El E2, Е3; этим самым будут определены и масштабные отрезки, и положительные направления на данных прямых. При помощи общей декартовой системы координат устанавливается взаимно однозначное соответствие между множеством всех точек пространства и множеством всех упорядоченных троек действительных чисел. Здесь для построения точки М, имеющей координатами заданные числа х, у, z, поступают так: если ,,  , то строят на осях Ox, Oy, Oz точки Р, Q, R, имеющие на этих осях координаты, соответственно равные х, у, z, и проводят через точки Р, Q, R плоскости, соответственно параллельные координатным плоскостям yOz, zOx, хОу; точка М есть точка пересечения этих плоскостей. Если одна из координат х, у, z равна нулю, например z = 0, то точка М лежит в координатной плоскости , то строят на осях Ox, Oy, Oz точки Р, Q, R, имеющие на этих осях координаты, соответственно равные х, у, z, и проводят через точки Р, Q, R плоскости, соответственно параллельные координатным плоскостям yOz, zOx, хОу; точка М есть точка пересечения этих плоскостей. Если одна из координат х, у, z равна нулю, например z = 0, то точка М лежит в координатной плоскости хОу и имеет в этой плоскости относительна на общей декартовой системы координат; заданной осями Ох и Оу, координаты х и у; построение точки М для этого случая указано выше. Аналогично строится точка М, если у = 0 (в этом случае она лежит в плоскости zOx) и если х=0 (в этом случае точка М лежит на плоскости yOz). Декартовой прямоугольной системой координат в пространстве называется упорядоченная тройка попарно перпендикулярных осей координат с общим началом координат О на каждой из них с одним и тем же масштабным отрезком для каждой оси (рис. 1.5). Определение декартовых прямоугольных координат точки формулируется аналогично соответствующему определению общих декартовых координат точки, а именно: пусть Р, Q, R — ортогональные проекции точки М на оси Ох, Оу, Оz (рис. 1.6); х — координата точки Р на оси Ох, у—координата точки Q на оси Оу, a z— координата точки R на оси Оz.. Три числа х, у, г называются декартовыми прямоугольными координатами точки М. Отметим, что часто масштабные векторы осей Ох, Оу, Оz в декартовой прямоугольной системе координат обозначаются  , ,  , , 

Рис. 1.3. Масштабные отрезки Рис. 1.4. Проекции точки М


Рис. 1.5. Декартовая система Рис. 1.6. Ортогональные проекции координат в пространстве точки М
Глава II. Преобразование систем координат.
Координаты одной и той же точки или вектора по отношению к различным системам координат, вообще говоря, различны. Очень важно уметь вычислять координаты точки или вектора относительно одной системы по координатам той же точки или вектора относительно другой. Приступая к решению этого вопроса, мы будем считать известным взаимное расположение основных элементов двух рассматриваемых систем координат. Под основными элементами данной системы декартовых координат мы подразумеваем начало этой системы и координатные векторы. Этими элементами определяются, конечно, и оси координат. Когда речь идет о координатах вектора (а не точки), то положения начал, конечно, безразличны. §1. Перенесение начала. Начнем с рассмотрения того простого случая, когда новая система отличается от старой только положением начала, так что координатные векторы (и следовательно, направления осей) в обеих системах одни и те же. Оси старой системы обозначим через Ox, Oy, Oz, а оси новой — через О'х', О'у', O'z' (рис. 2.1. а). Координатные векторы в обеих системах обозначим через  . Положение новой системы относительно старой, очевидно, вполне определяется координатами нового начала О' относительно старой системы. Пусть а, b, с обозначают эти координаты. . Положение новой системы относительно старой, очевидно, вполне определяется координатами нового начала О' относительно старой системы. Пусть а, b, с обозначают эти координаты. Если  — некоторый вектор, то, очевидно, его координаты относительно обеих систем одни и те же. Рассмотрим зависимость между старыми и новыми координатами какой-либо точки М. Пусть х, у, z обозначают координаты М в старой системе, а х', у', z' — в новой. Очевидно, имеем (см. рис. 2.1. а) — некоторый вектор, то, очевидно, его координаты относительно обеих систем одни и те же. Рассмотрим зависимость между старыми и новыми координатами какой-либо точки М. Пусть х, у, z обозначают координаты М в старой системе, а х', у', z' — в новой. Очевидно, имеем (см. рис. 2.1. а)  . (2.1) . (2.1) Но, по самому определению координат точки,  , ,  , ,  . . Внося эти выражения в предыдущую формулу, получим  , , откуда следует, что х = а+х', у=b + у', z = c + z'. (2.2) Формулы (2.2) дают возможность вычислить старые координаты, когда даны новые, и обратно. Для случая координат на плоскости будем иметь аналогично: х = а + х', у = b + у'; (2.3) для случая координат на прямой (оси) будем иметь, очевидно, х = а+х'; (2.4) ч итатель легко проверит эти формулы также непосредственно на чертеже (рис. 2.1. б). итатель легко проверит эти формулы также непосредственно на чертеже (рис. 2.1. б).  
а) б) Рис. 2.1. старая и новая системы координат Рис. 2.2. Системы координат с общим началом
§2. Изменение координатных векторов. Рассмотрим теперь другой частный случай, когда оси новой системы Ox'y'z' составляют произвольные углы с осями старой системы Oxyz, начала же их совпадают; координатные векторы  новой системы могут отличаться от старых не только по направлению, но и по величине (рис. 2.2). Мы будем считать заданными координаты векторов относительно старой системы. Пусть эти координаты суть соответственно новой системы могут отличаться от старых не только по направлению, но и по величине (рис. 2.2). Мы будем считать заданными координаты векторов относительно старой системы. Пусть эти координаты суть соответственно  , ,  , , , так что , так что  (2.5) (2.5) Пусть - некоторый вектор и пусть X, Y, Z и X', Y', Z' - его координаты соответственно относительно старой и новой систем. Имеем:  . . Внося в правую часть вместо их выражения (2.5) через и сравнивая в обеих частях коэффициенты при получим  (2.6) (2.6) Таким образом, задача наша решена: старые координаты выражены через новые. Если мы хотим выразить новые координаты через старые, то для этого достаточно решить систему (2.6) относительно Х', У', Z' или же прямо применить предыдущий результат, поменяв ролями старые и новые системы ). Из того обстоятельства, что, поменяв ролями старые и новые оси, мы можем выразить X', Y', Z' через X, Y, Z, вытекает, что система (2.6) всегда разрешима относительно X', У', Z', а это значит, что определитель  или или  отличен от нуля. Последнее вытекает также из того, что если бы предыдущий определитель был равен нулю, то тогда векторы u', v', w' были бы компланарны, а это противоречит условию, принятому раз навсегда относительно координатных векторов. Совершенно ясно, далее, что координаты любой точки М преобразуются по тем же формулам (2.6), так как координаты точки М суть не что иное, как координаты радиуса- вектора  этой точки. этой точки. Если, следовательно, х, у, z и х', у', z' суть соответственно старые и новые координаты точки М, то  (2.7) (2.7) Точно так же можно выразить новые координаты через старые. Заметим, что величины  в формулах (2.6) или (2.7) суть постоянные величины, зависящие только от взаимного расположения старой и новой систем и от длин координатных векторов, но не зависящие от рассматриваемого вектора Р (или точки М). в формулах (2.6) или (2.7) суть постоянные величины, зависящие только от взаимного расположения старой и новой систем и от длин координатных векторов, но не зависящие от рассматриваемого вектора Р (или точки М).
§3. Общий случай Пусть теперь новая система O'x'y'z' расположена совершенно произвольно относительно старой системы Охуz., Так как координаты вектора вовсе не зависят от положения начала координат, то, очевидно, они будут преобразовываться по тем же формулам (2.6) предыдущего параграфа, как если бы новое начало координат О' совпадало с О. Для вывода же формул преобразования координат точки введем вспомогательную систему 0'x"y"z" ( рис. 2.3 ), имеющую начало в О', но координатные векторы которой равны старым. Обозначая через (х, у, z), (х', у',z') и (х", у",z") координаты точки М соответственно в старой, новой и вспомогательной системах, будем иметь сперва х = а + х", y = b + y", z = c + z", г де а, b, с обозначают координаты нового начала О' относительно старой системы. Далее, по формулам предыдущего параграфа получим (рассматривая вспомогательную систему как старую) де а, b, с обозначают координаты нового начала О' относительно старой системы. Далее, по формулам предыдущего параграфа получим (рассматривая вспомогательную систему как старую)
подставляя эти значения в предыдущие формулы, получим окончательно  (2.8) (2.8) В формулах (2.8) все коэффициенты a, b, … ,п3 cуть постоянные величины, не зависящие от положения точки М (упомянутые коэффициенты зависят только от взаимного расположения осей старой и новой систем координат и от длин координат векторов). Для случая координат на плоскости вместо формул (2.8) будем иметь формулы (2.9) выводимые совершенно аналогичным способом.  (2.9) Меняя ролями старые и новые системы, получим совершенно аналогичные формулы:  (2.10) (2.10) для пространства и  (2.11) (2.11) — для плоскости. Эти формулы можно, конечно, получить из (2.8) (соответственно из (2.9)), решая последние относительно х', у', z' (соответственно х', у'). Для случая координат на прямой (оси Ох) формулы преобразования координат точки имеют, очевидно, следующий вид: x = а+1х', х' = а' + 1'х (2.12) ( где   ). ). Резюмируя полученные результаты, можно высказать следующее основное предложение: Декартовы координаты вектора относительно одной системы суть линейные однородные функции декартовых координат того же вектора относительно другой системы. Декартовы координаты точки относительно одной системы суть линейные (вообще неоднородные) функции декартовых координат той же точки относительно другой системы). Замечание. Если переменные х, у, z выражаются через переменные х’, у’, z’ формулами вида  (2.13) (2.13) то говорят, что х, у, z получаются из х’, у’, z’ линейной однородной подстановкой (преобразованием) с таблицей  (2.14) (2.14)
Определитель этой таблицы, т. е. определитель  = (2.15) = (2.15) называется определителем подстановки; величины  … … суть коэффициенты подстановки. Если суть коэффициенты подстановки. Если  , то подстановка называется особенной, если же , то подстановка называется особенной, если же  ,то подстановка - неособенная. ,то подстановка - неособенная. Формулы вида (2.8) также определяют линейную подстановку (линейное преобразование), вообще неоднородную. величины а, b, с, l1, l2, . . ., п3 суть коэффициенты подстановки, Однако определителем подстановки называется тот же определитель , составленный из коэффициентов 11, … , п3. Подстановка называется особенной или неособенной в зависимости от случаев или . Эти определения, естественно, распространяются на случай любого числа переменных. При указанной терминологии доказанное выше предложение можно высказать еще так: новые координаты точки получаются из старых линейной неособенной подстановкой с постоянными коэффициентами; новые координаты вектора получаются из старых линейной однородной неособенной подстановкой с постоянными коэффициентами. Коэффициенты названы здесь постоянными в том смысле, что они не зависят от рассматриваемого вектора или точки, а только от взаимного положения и длин старых и новых координатных векторов и начал координат. Легко видеть, что всякую неособенную подстановку вида (2.8) можно рассматривать, как формулы преобразования координат точки при переходе от одной системы декартовых координат к другой. Аналогично относительно подстановки вида (2.13) для координат вектора.

Рис. 2.3. Произвольные системы координат
Глава III. Приведение к каноническому виду уравнения поверхностей второго порядка в пространстве.
Пусть в пространстве задана прямоугольная декартова система координат Oxyz . Рассмотрим общее уравнение поверхности второго порядка, коэффициенты в котором обозначены специальным образом | a11x2+a22y2+a33z2+2a12xy+2a13xz+2a23yz+b1x+b2y+b3z+c = 0 | (3.1) |
где aij , bi , c - числа, причем хотя бы одно из чисел aij отлично от нуля. Выделим квадратичную часть выражения, стоящего в уравнении слева, | f = a11x2+a22y2+a33z2+2a12xy+2a13xz+2a23yz | (3.2) |
Такое выражение называется квадратичной формой от трех переменных. Составим матрицу  (3.3) (3.3) Эта матрица называется матрицей квадратичной формы f. Она является симметричной, то есть , или, другими словами, aij = aij . Следует обратить внимание на то, как эта матрица составлена. На диагонали у нее стоят коэффициенты при квадратах переменных, а в остальных местах - половины коэффициентов при произведениях переменных. , или, другими словами, aij = aij . Следует обратить внимание на то, как эта матрица составлена. На диагонали у нее стоят коэффициенты при квадратах переменных, а в остальных местах - половины коэффициентов при произведениях переменных. Исходная система координат является прямоугольной, поэтому скалярное произведение векторов с координатными  , ,  задается формулой . задается формулой .  (3.4) (3.4) Сформулируем две теоремы, позволяющие пользоваться приведенным ниже алгоритмом. Теорема 1. Если матрица A - симметричная, то ее собственные числа являются вещественными числами и существует ортонормированный базис из собственных векторов. Пусть A - матрица квадратичной формы f. По сформулированной теореме у нее существует ортонормированный базис из собственных векторов. Обозначим их  , и пусть эти векторы имеют координаты , и пусть эти векторы имеют координаты  Базис  назовем старым, а базис назовем старым, а базис  - новым. Тогда матрица перехода будет иметь вид - новым. Тогда матрица перехода будет иметь вид  (3.5) (3.5) Выберем новую систему координат  так, что начало координат не изменяется, а новые базисные векторы задают направления новых координатных осей так, что начало координат не изменяется, а новые базисные векторы задают направления новых координатных осей  (рис. 3.1). (рис. 3.1). Тогда координаты (x, y, z) точки M являются координатами ее радиус-вектора  и, следовательно, при замене базиса меняются по формуле и, следовательно, при замене базиса меняются по формуле |  |
(3.6) |
Теорема 2. Пусть собственные векторы матрицы квадратичной формы f, образующие ортонормированный базис, соответствуют собственным числам . Тогда в системе координат  квадратичная форма принимает вид квадратичная форма принимает вид  (3.7) (3.7) Если мы из равенства (3.6) выпишем выражение x, y, x через новые переменные  и подставим в уравнение (3.1), то обнаружим, что квадратичная его часть и линейная часть преобразуются независимо друг от друга. В результате уравнение в системе координат имеет вид и подставим в уравнение (3.1), то обнаружим, что квадратичная его часть и линейная часть преобразуются независимо друг от друга. В результате уравнение в системе координат имеет вид |  | (3.8) |
Хотя бы одно из чисел отлично от нуля, иначе матрица A была бы нулевой.
Рассмотрим три случая. Пусть все собственные числа отличны от нуля. В уравнении (3.8) выделим полные квадраты  (3.9) (3.9) Выполним параллельный перенос системы координат , взяв за новое начало системы координат точку  . Тогда в новой системе координат уравнение . Тогда в новой системе координат уравнение  запишется в виде запишется в виде |  | (3.10) |
Здесь возможны следующие варианты. Пусть  Перенесем  в правую часть и поделим обе части на в правую часть и поделим обе части на  , получим , получим |  | (3.11) |
Если числа  отрицательны, то ни одна точка пространства не удовлетворяет этому уравнению. Говорят, что оно определяет мнимый эллипсоид. отрицательны, то ни одна точка пространства не удовлетворяет этому уравнению. Говорят, что оно определяет мнимый эллипсоид. Если числа положительны, то уравнение является каноническим уравнением эллипсоида. Если одно из чисел отрицательно, а остальные положительны, то (после переименования осей) получим каноническое уравнение однополостного гиперболоида. Если одно из чисел положительно, остальные отрицательны, то (после переименования осей) получим каноническое уравнение двуполостного гиперболоида. Пусть  . . Если все числа положительны, то только начало координат удовлетворяет этому уравнению. Поверхность выродилась в точку. Если одно из чисел отрицательно, а два положительны, то (после переименования осей) получим каноническое уравнение конуса. Если же два числа отрицательны или все три отрицательны, то, умножив обе части уравнения на -1, получим случай 2 или случай 1. Пусть одно из чисел равно нулю, а два других отличны от нуля. Допустим, что  . Тогда в уравнении (3.8) выделим полные квадраты по переменным . Тогда в уравнении (3.8) выделим полные квадраты по переменным  . .  (3.12) (3.12) Пусть  . Преобразуем уравнение к виду . Преобразуем уравнение к виду  (3.13) (3.13) Поделим обе части уравнения на  и выполним параллельный перенос осей координат, взяв за новое начало координат точку и выполним параллельный перенос осей координат, взяв за новое начало координат точку  . Получим уравнение . Получим уравнение |  | (3.14) |
Если числа  и и  положительны, то это - каноническое уравнение эллиптического параболоида. положительны, то это - каноническое уравнение эллиптического параболоида. Если  , получим каноническое уравнение гиперболического параболоида. , получим каноническое уравнение гиперболического параболоида. Если числа и отрицательны или , то сменим направление у оси  на противоположное и получим либо случай 1, либо случай 2. на противоположное и получим либо случай 1, либо случай 2. Пусть  Тогда поверхность является цилиндрической, образующие которой параллельны оси  , а направляющей служит кривая на плоскости , а направляющей служит кривая на плоскости  c уравнением c уравнением |  | (3.15) |
Пусть только одно из чисел отлично от нуля. Допустим, что  .Тогда в уравнении (3.8) выделим полный квадрат по переменной .Тогда в уравнении (3.8) выделим полный квадрат по переменной  |  | (3.16) |
Пусть хотя бы одно из чисел  отлично от нуля. Тогда на плоскости отлично от нуля. Тогда на плоскости  возьмем две перпендикулярные прямые возьмем две перпендикулярные прямые  и и  . Возьмем новую систему координат, у которой начало будет в точке O, ось . Возьмем новую систему координат, у которой начало будет в точке O, ось  направлена по оси направлена по оси  , ось , ось  направлена вдоль второй прямой, а ось направлена вдоль первой прямой. Тогда уравнение примет вид направлена вдоль второй прямой, а ось направлена вдоль первой прямой. Тогда уравнение примет вид |  | (3.17) |
Это - уравнение цилиндрической поверхности, образующие которой параллельны оси  , а направляющей служит кривая на плоскости , а направляющей служит кривая на плоскости  с уравнением с уравнением | | (3.18) |
Пусть  . Тогда уравнение принимает вид . Тогда уравнение принимает вид |  | (3.19) |
Если число справа положительно, то уравнение определяет две плоскости |  | (3.20) |
Если число справа равно нулю, то уравнение определяет одну плоскость |  | (3.21) |
Если число справа отрицательно, то ни одна точка пространства уравнению не удовлетворяет. Итак, получен алгоритм, позволяющий установить, какая поверхность задается уравнением второго порядка и каково ее положение в пространстве.
 Рис. 3.1. Система координат
Глава IV. Типы поверхностей второго порядка. | Поверхности | Название | Каноническое уравнение | Вид поверхности |
1 |
Эллипсоид |
 + + + + =1 =1 |  | | 2 | Мнимый эллипсоид | ++= –1 |
|
3 |
Однополостный гиперболоид |
+–=1 |  |
4 |
Двуполостный гиперболоид |
+–= –1 | 
|
5 |
Эллиптический параболоид |
+=2Z |   |
6 |
Гиперболический параболоид |
–=2Z |  |
7 |
Конус второго порядка |
+–=0 |  |
8 |
Мнимый конус второго порядка |
++=0 |  |
9 |
Цилиндр эллиптический |
+=1 |  |
10 | Мнимый эллиптический цилиндр | += –1 |
|
11 |
Цилиндр гиперболический |
–= 1 1 |  |
12 |
Цилиндр параболический |
X2=2pY |  |
13 |
Пара пересекающихся плоскостей |
–=0 |  |
14 |
Пара мнимых пересекающихся плоскостей |
+=0 |  |
15 |
Пара параллельных плоскостей |
X2–a2=0 |  |
16 | Пара мнимых параллельных плоскостей | X2+a2=0 |
|
17 |
Пара совпадающих плоскостей |
X2=0 |  |
Заключение Данная курсовая работа раскрывает теорию приведения поверхности второго порядка к каноническому виду путем преобразования систем координат. Ее можно использовать как учебное пособие по приведенной теме. А практическая часть работы, представленная десятью задачами, может служить примером решения типичных задач.
Список использованной литературы
Беклемишев Д.В. Курс аналитической геометрии и линейной алгебры. – М.: Наука, 1980. Бугров А.С. Никольский С.М. Высшая математика. Элементы линейной алгебры и аналитической геометрии. – М.: Наука, 1980. Глухое М. М. Алгебра и аналитическая геометрия: Курс лекций. – М.: 1986. Рублев А. Я. Курс линейной алгебры и аналитической геометрии. – М.: Высшая школа, 1972. Моденов П.С. Аналитическая геометрия. – Изд-во МГУ, 1969. Александров П.С. Лекции по аналитической геометрии. – М.: Наука, 1968. Мусхешвили Н.И. Курс аналитической геометрии. – С-П, 2002. Ефимов А.В., Демидова Б.П. Сборник задач по математике для вузов. Линейная алгебра и основы математического анализа. – М.: Наука, 1981. Данко П.Е., Попов А.Г., Кожевникова Т.Я. Высшая математика в упражнениях и задачах, в двух частях, часть 1, издание четвёртое, исправленное и дополненное. – М.: Высшая школа, 1986. Цубербиллер О.Н. Задачи и упражнения по аналитической геометрии, издание двадцать девятое, стереотипное. – М.: Наука, 1968. Привалов И.И. Аналитическая геометрия. – М.: Наук, 1966. Позняк Э.Г. Аналитическая геометрия. – М.: Наука, 1999. Наумов В.А. Руководство к решению задач по линейной алгебре и аналитической геометрии. - М.: Наука, 1993. Клетенник Д.В. Сборник задач по аналитической геометрии. М.: Наука, 1986. Бахвалов С.Б. Сборник задач по аналитической геометрии. М.: Наука, 1964.
Приложение 1 Задача 1. Даны уравнения одной из сторон ромба х-3у + 10 = 0 и одной из его диагоналей х + 4у - 4 = 0; диагонали ромба пересекаются в точке (0; 1). Найти уравнение остальных сторон ромба.    Решение: Найдем т. пересечения  и и  : :    => =>  A(-4;2) A(-4;2)
Т.к P – середина отрезка AC, то 
 => C(4;0). Через точку C направим прямую, параллельную (т.е. найдем => C(4;0). Через точку C направим прямую, параллельную (т.е. найдем  ). ).   => =>   По свойству ромба: По свойству ромба: => =>  ; ;  => => 
  ; ;  ; ;  ; ;  => => 
  ; По формуле прямой, проходящей через две точки, найдем ; По формуле прямой, проходящей через две точки, найдем 
 ; ; 
Задача 2. Даны координаты вершин треугольника АВС. Найти длины медианы, высоты, биссектрисы, проведенных из вершины А. Вычислить внутренний угол при вершине В. А (8;0), В(-4; –5); С(-8;-2).
Решение:
1)  ={-12; -5}, ||=13 ={-12; -5}, ||=13  = {-4; 3}, ||=5 = {-4; 3}, ||=5  = {-16; -2}, ||= = {-16; -2}, ||= = =
A      y
x

C
L M 
H B
2)  =0.5(+)=0.5{-12-16;-5-2}={-28;-7} =0.5(+)=0.5{-12-16;-5-2}={-28;-7} || = 
3) Имеем уравнение прямой ВС:
3x + 4y + 32 = 0. | | | = ρ(A, BC) = | = ρ(A, BC) = | |3∙8+4∙0+32| | = | |  |
4) Найдем уравнение прямой AL:  ; ;  ; ;  Значит,  . . Тогда,  или или 
Найдем точку L – точку пересечения прямых AL и BC:  ; ;  Тогда  и  . . Итак,  и  5) 
Ответ:  ; ; ; ; ; ; 
Задача 3. Найти точки пересечения кривой второго порядка  с прямой (а): с прямой (а):  Решаем систему:  ; ;  ; ; Подставляем в первое уравнение и получаем:   D<0 => нет точек пересечения D<0 => нет точек пересечения
Ответ: нет точек пересечений
Задача 4. Полюс полярной системы координат совпадает с началом декартовых прямоугольных координат, а полярная ось направлена по биссектрисе первого координатного угла. Даны полярные координаты точек  . Определить декартовы прямоугольные координаты этих точек. . Определить декартовы прямоугольные координаты этих точек. 
M(xM; yM), где xM=ρ1Cos (φ1+π/4) = Cos(25π/12) = Cos(π/12), yM=ρ1Sin (φ1+π/4) = Sin(25π/12) = Sin(π/12).
N(xN; yN), где xN=ρ2Cos (φ2+π/4) = 2Cos(π +π/4) =-2Cos(π/4)= , , yN=ρ2Sin (φ2+π/4) = 2Sin(π +π/2) = -2Sin(π/4)= .
Ответ: Задача 5. Для векторов  , заданных в ортонормированном базисе , заданных в ортонормированном базисе  найдите: найдите: направляющие косинусы вектора  ; ; площадь параллелограмма, построенного на векторах и  , имеющих общее начало; , имеющих общее начало; объем пирамиды, построенной на векторах , и , имеющих общее начало. и , имеющих общее начало. 
1)  ; ;  ; ;  2)  ; ;  ; ;  3) 
Ответ:  ; ;  ; ;  ; ; ; 82. ; 82.
Приложение 2 Задача 1.С помощью преобразования поворота прямоугольной декартовой системы привести к каноническому виду уравнение кривой второго порядка 29x2 + 144xy + 71y2 – 40x + 30y – 50 = 0. Написать формулы преобразования и изобразить данную кривую на чертеже. Решение: При повороте системы координат на угол φ наблюдается следующая зависимость между старыми и новыми координатами:   . . Тогда общее уравнение кривой второго порядка Ax2 + 2Bxy + Cy2 + Dx + Ey + F = 0 преобразуется следующим образом:    + +  + +  Раскроем скобки. Получим 
или  , где , где
 


 . .
Для того, чтобы избавиться от перекрестного члена необходимо повернуть систему координат на такой угол φ, чтобы  , т.е. , т.е. 

Найдем  : :  где где  . .
Тогда 
и  ; ;  . .
Имеем:      . .
Получили:     , где , где  . . Канонический вид уравнения заданной кривой:  Это гипербола с вершинами в точках  и и  ; асимптотами ; асимптотами  и фокусами и фокусами  и и
Ответ:
Задача 2. Привести уравнение кривой к каноническому виду и построить кривую на плоскости: |  . . |
|
Решение: Имеем: a11 = 4, a22 = 9, a12 = 0, a1 = −16, a2 = 9, a0 = 37. Тогда  , то есть уравнение задает кривую эллиптического типа. Так как , то есть уравнение задает кривую эллиптического типа. Так как  , то выделяем "полный квадрат": , то выделяем "полный квадрат":   ; ;  ; ;   ; ;   . . Сделаем замену:  . . В системе координат  уравнение имеет вид: уравнение имеет вид: |  . . |
|
Таким образом, данное уравнение определяет эллипс с полуосями  и и  , с центром в точке , с центром в точке  . Строим чертеж . . Строим чертеж . 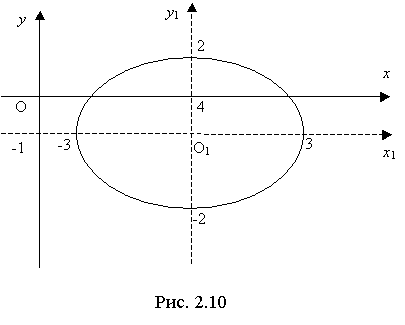 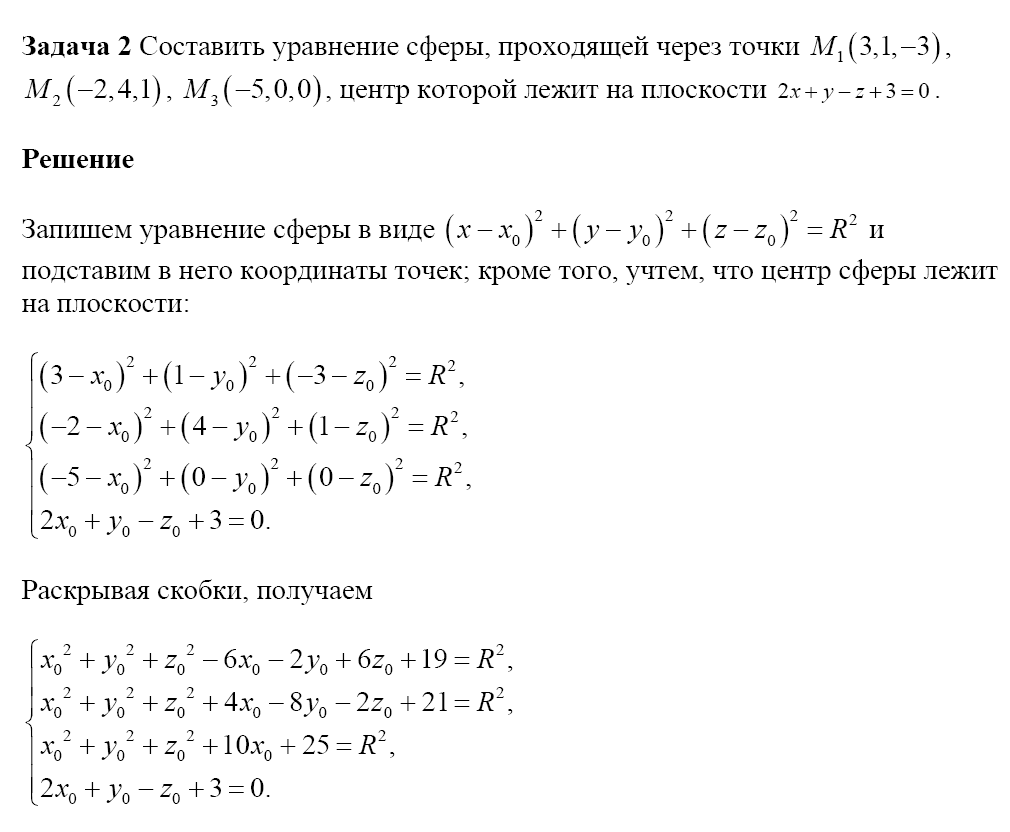
Задача 3. Решение: 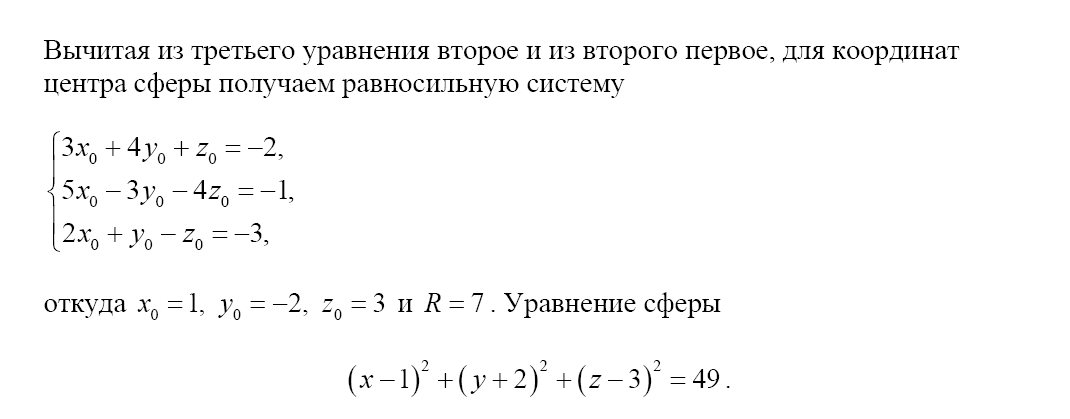
Ответ:
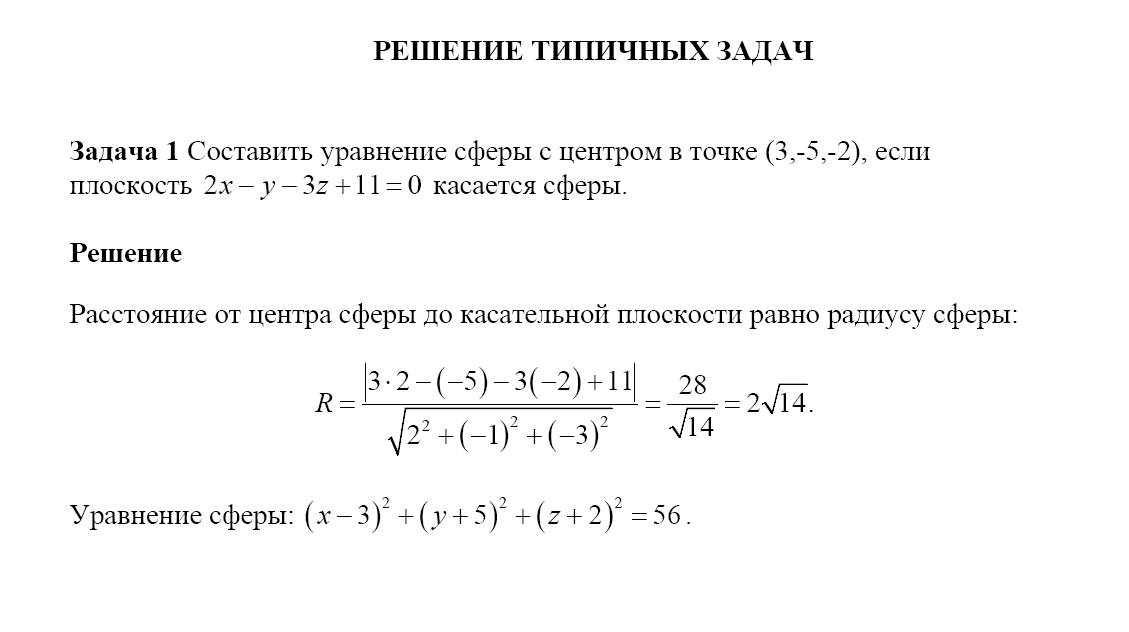
Задача 4.
Ответ: 
Задача 5. Привести уравнение кривой к каноническому виду и построить кривую на плоскости: |  . . | (1) |
Решение: Имеем: a11 = 9, a12 = −6, a22 = 0, a1 = −21, a2 = 6, a0 = 81. Тогда  то есть уравнение (1) задает кривую гиперболического типа. Далее находим:  Найдем собственные значения:  . . Тогда угол поворота равен  Далее найдем координаты α, β нового центра О1 системы координат  . .  . . Уравнение (1) в системе примет вид:   |   . . | (2) |
Уравнение (2) задает гиперболу, у которой  и и  , фокусы гиперболы лежат на оси О1х1. , фокусы гиперболы лежат на оси О1х1. Строим гиперболу на плоскости  по плану (рис. 2.11): по плану (рис. 2.11): ╥ поворачиваем ось  на угол на угол  против часовой стрелки, для этого строим прямую против часовой стрелки, для этого строим прямую  (так как (так как  ); в результате получаем систему координат ); в результате получаем систему координат  ; ; ╥ на плоскости отмечаем точку  , через эту точку проводим две прямые, параллельные осям , через эту точку проводим две прямые, параллельные осям  и и  ; получаем систему координат ; ; получаем систему координат ; ╥ в системе  строим гиперболу, согласно уравнению (2). строим гиперболу, согласно уравнению (2). 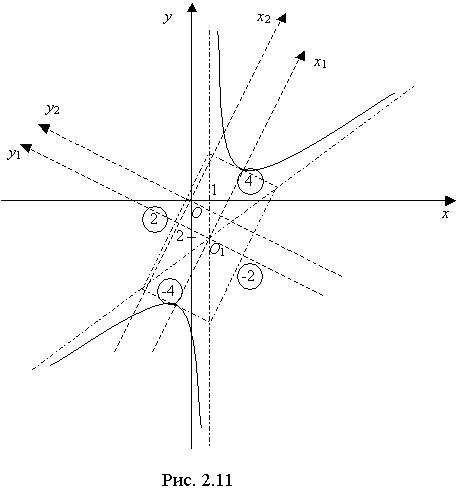
В этом последнем случае надо считать заданными координаты координатных векторов u, v, w старой системы относительно новой системы. Подстановка будет однородной в случае, когда а = b = с = 0.
|
