Общие характеристики пакета ControlSystemToolbox(CST)
Исследование систем автоматического управления начинаются с создания математической модели. В пакете CST линейные модели могут быть представлены в четырех формах:
· передаточная ф-ция(tf)
· нули, полюса и коэффициент усиления(zpk)
· пространство состояния(ss)
· частотные характеристики(frd)
Програма№1
>> h1=tf([1,0],[1,2,10])
Transfer function:
s
--------------
s^2 + 2 s + 10
>> z=0
z =
0
>> p=[2,1+j,1-j]
p =
2.0000 1.0000 + 1.0000i 1.0000 - 1.0000i
>> k=2
k =
2
>> H=zpk(z,p,k)
Zero/pole/gain:
2 s
--------------------
(s-2) (s^2 - 2s + 2)
>> A=[0,1;-5,-2]
A =
0 1
-5 -2
>> B=[0;3]
B = 0
3
>> C=[1,0]
C =
1 0
>> D=0
D =
0
>> H1=ss(A,B,C,D)
a =
x1 x2
x1 0 1
x2 -5 -2
b =
u1
x1 0
x2 3
c =
x1 x2
y1 1 0
d =
u1
y1 0
Continuous-time model.
>> h2=tf([2,0],[5,1])
Transfer function:
2 s
-------
5 s + 1
>> fred=[1,2,5,10,20]
fred =
1 2 5 10 20
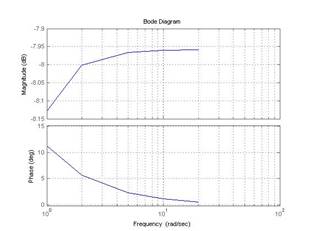
>> H2=frd(h2,fred)
Frequency(rad/s) Response
---------------- --------
1 0.3846 + 0.0769i
2 0.3960 + 0.0396i
5 0.3994 + 0.0160i
10 0.3998 + 0.0080i
20 0.4000 + 0.0040i
Continuous-time frequency response.
>> figure(1)
>> bode(H2),grid on
>> h11=ss(A,B,C,D)
a =
x1 x2
x1 0 1
x2 -5 -2
b =
u1
x1 0
x2 3
c =
x1 x2
y1 1 0
d =
u1
y1 0
Continuous-time model.
>> h22=tf(h11)
Transfer function:
3
-------------
s^2 + 2 s + 5
В пакете CST имеются команды, позволяющие получать математическое описание сложных систем по их структурным схемам.
Програма№2
>> h1=tf([4],[5,1])
Transfer function:
4
-------
5 s + 1
>> h2=tf([1,0],[1,2,10])
Transfer function:
s
--------------
s^2 + 2 s + 10
>> H=series(h1,h2)
Transfer function:
4 s
--------------------------
5 s^3 + 11 s^2 + 52 s + 10
>> H1=h1*h2
Transfer function:
4 s
--------------------------
5 s^3 + 11 s^2 + 52 s + 10
>> H2=parallel(h1,h2)
Transfer function:
9 s^2 + 9 s + 40
--------------------------
5 s^3 + 11 s^2 + 52 s + 10
>> H20=h1+h2
Transfer function:
9 s^2 + 9 s + 40
--------------------------
5 s^3 + 11 s^2 + 52 s + 10
>> H3=feedback(h1,h2)
Transfer function:
4 s^2 + 8 s + 40
--------------------------
5 s^3 + 11 s^2 + 56 s + 10
>> H4=feedback(h1,h2,+1)
Transfer function:
4 s^2 + 8 s + 40
Реклама

--------------------------
5 s^3 + 11 s^2 + 48 s + 10
>> H5=[h1,h2]
Transfer function from input 1 to output:
4
-------
5 s + 1
Transfer function from input 2 to output:
s
--------------
s^2 + 2 s + 10
>> H6=[h1;h2]
Transfer function from input to output...
4
#1: -------
5 s + 1
s
#2: --------------
s^2 + 2 s + 10
>> H7=append(h1,h2)
Transfer function from input 1 to output...
4
#1: -------
5 s + 1
#2: 0
Transfer function from input 2 to output...
#1: 0
s
#2: --------------
s^2 + 2 s + 10
Вариант№1
| K1
|
10 |
| K2
|
5 |
| K3
|
12 |
| K4
|
6 |
| T1
|
8 |
| T3
|
4 |
| T4
|
2 |
| T5
|
1 |
| T6
|
3 |
| T7
|
5 |
Структурная схема
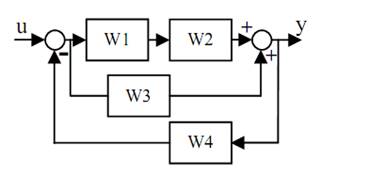
Таблица значений функций
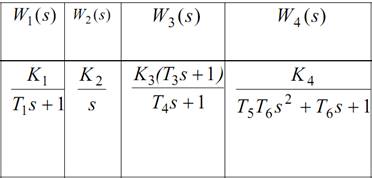
Програма№3
>> variant=1;
>> W1=tf([10],[8,1])
Transfer function:
10
-------
8 s + 1
>> W2=tf([5],[1,0])
Transfer function:
5
-
s
>> W3=tf([12*4,12],[2,1])
Transfer function:
48 s + 12
---------
2 s + 1
>> W4=tf([6],[1*3,3,1])
Transfer function:
6
---------------
3 s^2 + 3 s + 1
>> H1=W1*W2
Transfer function:
50
---------
8 s^2 + s
>> H2=H1+W3
Transfer function:
384 s^3 + 144 s^2 + 112 s + 50
------------------------------
16 s^3 + 10 s^2 + s
>> Q=feedback(H2,W4)
Transfer function:
1152 s^5 + 1584 s^4 + 1152 s^3 + 630 s^2 + 262 s + 50
-----------------------------------------------------
48 s^5 + 78 s^4 + 2353 s^3 + 877 s^2 + 673 s + 300
h=tf([1152,1584,1152,630,262,50],[48,78,2353,877,673,300])
Transfer function:
1152 s^5 + 1584 s^4 + 1152 s^3 + 630 s^2 + 262 s + 50
-----------------------------------------------------
48 s^5 + 78 s^4 + 2353 s^3 + 877 s^2 + 673 s + 300
>> figure(1)
>> step(h),grid on
>> figure(2)
>> impulse(h),grid on
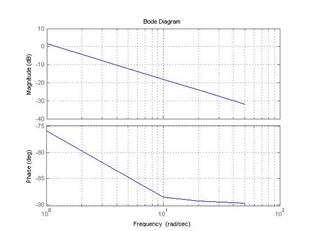
>> figure(3)
>> bode(h),grid on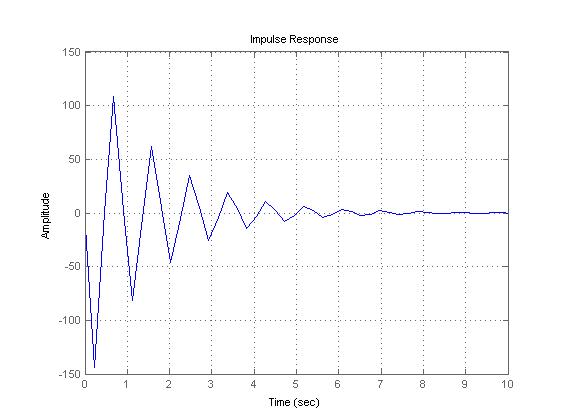
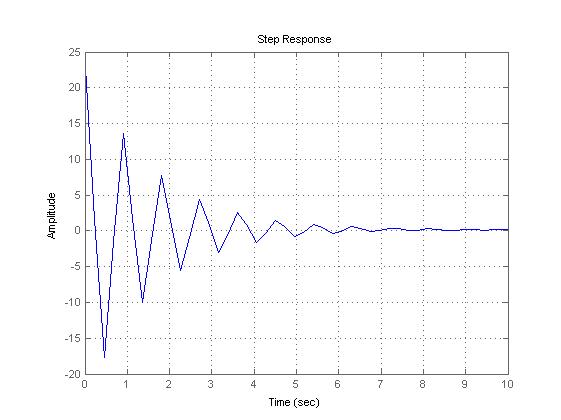
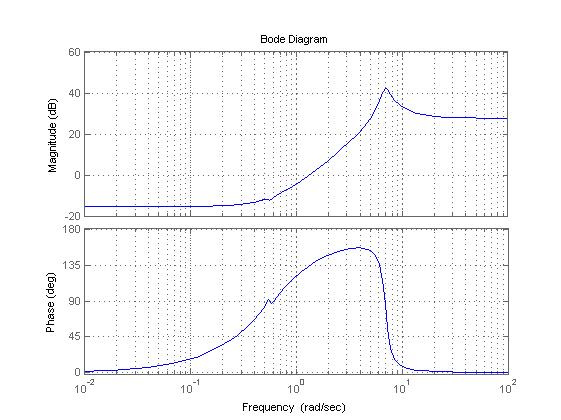
Вывод. Изучили возможности MatLab по созданию и преобразованию моделей линейных систем. Создали и преобразовали модели линейных систем, определили реакции типовых звеньев на гармонические воздействия.
|
