3.Анализ существующих конструкций
3.1. Манипулятор пневматический грузоподъемность 1000кг
.
Модель П-255.
Подъемник предназначен для замены агрегатов грузовых автомобилей при выполнении работ по текущему ремонту.
Подъемник климатическое исполнение УХЛ категории размещения 4 по ГОСТ 15150-69.
Таблица 1. Техническая характеристика.
| Тип манипулятора |
стационарный |
| Вид привода |
электропневматический |
| Грузоподъемность мах, кг |
1000 |
| Ход рабочего органа по высоте, мм |
2070 |
| Установленная мощность, кВт |
1,1 |
| Скорость подъема мах, м/с |
0,046 |
| Скорость опускания, м/с |
0,4 |
| Удельная электроемкость, кВт*С/т |
49,5 |
| Масса, кг |
650 |
| Габаритные размеры, мм |
длина |
2500 |
| ширина |
700 |
| высота |
1440 |
| Изготовитель Черногорский АРЗ |
3.2. Манипулятор пневматический с ручным управлением.
Модель - 2/15.140005, заводской номер - № 316.
Изготовлен Электрогорским опытно – экспериментальным заводом и предназначен для механизации процессов погрузки – выгрузки заготовок и деталей на обрабатывающим оборудовании, а также при производстве сборочных, погрузочно – разгрузочных и транспортно – складских работ.
Таблица 2. Техническая характеристика.
| Тип манипулятора |
стационарный |
| Грузоподъемность мах, кг |
100 |
| Усилия перемещения груза, Н |
По вертикали |
40 |
| По горизонтали |
40 |
| Давления воздуха, МПа |
0,4 – 0,63 |
| Габаритные размеры, мм |
длина |
3000 |
| ширина |
600 |
| высота |
4000 |
| Масса, кг |
550 |
| Зона обслуживания, мм |
по высоте |
0 - 1800 |
| по радиусу |
600 - 3000 |
| Поворот вокруг оси колонны, град |
360 |
| Скорость подъема и опускания груза, м/с |
0,5 |
Устройство манипулятора 2/15.140005:
На поворотной оси, расположенной в стойке 2, закреплена подвижная часть манипулятора, состоящая из двух жестко соединенных между собой щек 3 и многозвенного рычажно – стержневого механизма пантографа. Пантограф состоит из стрелы 11, тяги 12,звена 10, рукояти 13 и шарниров соединения пантографа. На рукояти 13 шарнирно закреплен кран управления 15(датчик веса), несущий узел крепления сменных грузозахватных органов 16.Щеки имеют горизонтальные и вертикальные пазы, в которых шарнирно закреплены, соответственно, тяга 12 и стрела 11. Оси этих шарниров представляют собой опорные, перемещающиеся вдоль пазов. Перемещение опорных роликов в горизонтальном направлении оператором за ручку 14. Перемещение опорных роликов в вертикальных пазах осуществляется приводом 4, шток которого шарнирно связан с роликами.
В стационарном исполнении манипулятор устанавливается на колоне 1.
Работа манипулятора:
Сжатый воздух из сети по трубопроводу подводится к крану управления(КУ). При нажатии рукоятки КУ вверх, открывается клапан. Воздух по трубопроводу из КУ поступает в верхнюю полость привода пневмогидробака ПГБ манипулятора, заполненную маслом. Вытесняемое масло приводит в движение поршень.
Подъем груза:
При нажатии рукоятки КУ вниз открывается клапан, через который воздух по трубопроводу выходит из верхней полости привода манипулятора в атмосферу. Масло из гидроцилиндра вытесняется в пневмогидробак.
Реклама

Опускание груза:
В пневмосхеме установлен предохранительный клапан, ограничивающий мах давление в пневмосистеме, что необходимо для предотвращения перегрузок манипулятора. Клапан отрегулирован на давление, позволяющее поднимать груз весом 100 кг.
Техническое обслуживание.
Ежедневно перед началом работы на манипуляторе:
- убедитесь в отсутствии каких – либо повреждений или неисправностей манипулятора.
- обнаружив неисправность или повреждение, примите все меры к их устранению.
Таблица 3. Характерные неисправности и методы их устранения
.
| Наименования неисправности |
Вероятная
причина
|
Метод
устранения
|
Груз не фиксируется в поднятом положении
а) шум выходящего воздуха в КУ
|
поднята траверса
|
Ослабить гайки и опустить траверсу до прекращения шума выходящего воздуха. |
| б) самопроизвольный подъем стрелы манипулятора |
нарушение регулировки крана |
Ослабить контр – гайки. Ослабляя пружины добиться фиксирования стрелы с грузом (без груза). |
3.3
Манипулятор HIAB 166E-4CLX
:
Данная крано-манипуляторная установка с гидровлическим управлением. Количество гидровлических удлинителей четыре. Кинематическая версия стрелы «Е», т.е. первая и вторая стрела соединена траверсами, улучшающая грузоподъемность на максимальном вылете.

Рис.1.Схемаманипулятора HIAB 166E-4CLX.
1. Неповоротная платформа с опорно-поворотным устройством
2. Колонна
3.Первая стрела
4. Вторая стрела
5. Удлинители
6.Выносные опоры
7. Механизм поворота
8. Рычаги управления.
Техническая характеристика:
Грузовой момент,тм ……………………………………………….. 4,6
Максимальная грузоподъемность………………………….. 1820 кг - 2,7 м
Грузоподъемность на максимальном вылете……………… 640 кг - 7,2 м
Размах опор, тип управления………………………………..4,7 м (ручн.).
Неисправности
HIAB 166E-4CLX
В процессе эксплуатации грузоподъемной техники, в т.ч. и кранов-манипуляторов, возникает необходимость в проведении ремонтных работ. Для данной техники наиболее характерно протекание масла из гидроцилиндров или клапанов, что снижает грузоподъемность крана из-за падения давления в гидросистеме, приводит к уменьшению количества масла в гидросистеме, а также к повреждению резинотехнических изделий шасси при попадании на них масла. Также не является исключением повреждение хромового покрытия гидроцилиндров выносных опор.
Проведение ремонтных работ начинается с технического обследования крана-манипулятора, в ходе которого оценивается работоспособность узлов и агрегатов и определяется соответствие параметров крана-манипулятора, заявленным в паспорте данным. После этого составляется протокол обследования с указанием результатов и рекомендаций по проведению ремонта, а также его стоимостью и стоимостью запасных частей. По окончании ремонта проводится текущее техническое обслуживание крана-манипулятора. По окончании ремонта проводится передача крана-манипулятора заказчику, включающая в себя контрольные испытания. Наиболее часто встречающаяся неисправность - чрезмерный износ уплотнительных элементов, что приводит к протеканию масла из гидроцилинра, либо перетеканию масла внутри гидроцилиндра из штоковой полости в поршневую, что приводит к невозможности проведения точных монтажных работ и затруднению других видов работ. В ряде случаев (в основном для старых кранов) разборка гидроцилиндра вызывает большие затруднения в связи с их конструктивной особенностью. На основании большого опыта работы с продукцией данной фирмы была сделана специальная установка, позволяющая значительно снизить трудозатраты на разборку/сборку гидроцилиндров, а в ряде случаев является единственным вариантом, позволяющим разобрать гидроцилиндр.
Реклама

3.4. Манипулятор VPL 90-76:
Основным достоинством манипулятора VPL 90-76 это: больший вылет стрелы(7600 мм), большая грузоподъемность при сохранении конструктивной массы. Как и в предыдущих моделях в этой модели тип механизма поворота колонны двухреечный на подшипниках качения разнесенных по валу, что предотвращает перегрузки колонны, уменьшает коэффициент трения обеспечивая более равномерную и плавную работу манипулятора, а также способствует продлению срока службы.Теперь максимальный вылет грейфера ниже плоскости основания составляет-4950мм, что обеспечивает уверенную работу манипулятора при захвате далеко лежащего груза. Чтобы обеспечить более надежную подачу жидкости и уменьшить ее нагрев во время работы, был увеличен гидробак с 66л до 106л. Такое решение связано с тем, что на манипуляторе VPL-90-76 установлен более мощный распределитель и гидронасос. Гидробак также снабжен устройством для подогрева жидкости в зимней период, термометром, заливной горловиной с фильтром, а также сливным фильтром с указателем загрязненности.

Рис. 2. Схема манипулятора VPL 90-76.
Техническая характеристика:
- Грузовой момент манипулятора, кНм, не менее………………………90
- Максимальный вылет грейфера от оси поворота колонны, мм……..7600
- Масса груза поднимаемая манипулятором на максимальном вылете
стрелы (без учета массы грейфера), кг, не более……………………..1207
- Максимальный вылет грейфера ниже плоскости основания, мм,
не менее………………………………………………………………… 4950
- Ход удлинителя, мм……………………………………………………1200
- Угол поворота манипулятора в горизонтальной плоскости, град,
не менее………………………………………………………………….408
- Масса конструктивная кг, не более…………………………………..2000
- Масса снаряженная, кг, не более…………………………………….2500
- Тип механизма поворота колонны – двухреечный на подшипниках качения (верхний подшипник - роликовый);
- Модуль зубчатого зацепления механизма поворота колонны ……..11
- Тип основавания – жесткое сварное;
- Рабочий орган:
– ротатор – GR 110-1;
– грейфер – VPL-X35;
- Гидронасос – 310.3.80.03;
- Гидрораспределитель – RM-316(Швеция);
- Основные несущие узлы гидроманипулятора VPL-90-76 выполнены из низколегированной стали повышенной прочности.
3.5. Манипулятор РМ-20.
Предназначен для захвата из пачки или с технологической поверхности, перемещения, поворота, укладывания листовых, в т.ч. длинномертных материалов, для работы с мешками, ящиками, коробками и др. грузами массой до 100 кг. Область применения манипулятора ограничивается целевым назначением, а также массо-габаритными параметрами обрабатываемых материалов, грузов и заготовок. и имеет следующие технические характеристики:
Таблица 4. Техническая характеристика.
| Привод |
пневматический |
| Рабочее давление, бар, не более |
6 |
| Номинальный расход - Qn G1/4, Нл/мин, не более |
1000 |
| Электрооборудование, В |
24/220 |
| Монтажные позиции |
на полу
на стене
на потолке
|
| Количество степеней свободы |
4 |
| Масса, кг, не более |
250 |
3.6. Манипулятор HANDLING - Мод. 810H.
Манипулятор для загрузки и разгрузки заготовок или готовых деталей. Система пневматики гарантирует простоту эксплуатации и безопасность работы оператора.

Рис.3. HANDLING - Мод. 810H.
3.7. Манипулятор- МАВ-15
Промышленный манипулятор – МАВ-15 предназначен для перемещения уравновешенных деталей. Захват расположен над центром тяжести детали. Органы управления манипулятором находятся в непосредственной близости от перемещаемого изделия, что позволяет позиционировать перемещаемую деталь с очень высокой точностью. Манипулятор комплектуется специализированным захватом с пневмоприводом, причём нормальное положение захвата - "закрыто". При необходимости разворота детали захват может быть оборудован приводным поворотным устройством. Разработан для помещений с ограниченной высотой потолков (высота колонны не более 3,0 м) и для увеличения высоты подъёма детали.

Рис. 4. Манипулятор- МАВ-15.
Технические характеристики:
Грузоподъёмность…………………………………………… .до 100 кг
Высота подъёма……………………………………………………1,4 м
Рабочая зона………………………………….. сектор - 270°, радиус - до 3,0 м
Рабочий цикл……………………………………………………….15 с
Расход воздуха…………………………………………….. не более 36 л/цикл
Единый энергоноситель для привода подъёма и захвата
сжатый воздух …………………………………………………0,6 МПа.
Области применения:
Машиностроение - перемещение деталей и заготовок весом до 200 кг от подающего конвейера к обрабатывающему центру и обратно; перемещение деталей из транспортной тары к обрабатывающему центру и обратно; перемещение деталей при упаковке и маркировке. Автомобилестроение - перемещение узлов автомобиля при сборке (сборочный конвейер) - установка колёс, аккумуляторов, стекол, кресел, дверей, приборной панели, узлов двигателя и подвески. Химическая промышленность - перемещение изделий, тары с ЛВЖ или сыпучими материалами в пожароопасных и взрывоопасных зонах. Пищевая промышленность - перемещение исходного сырья и продукции (мешков, коробок, навесок, противней и т.п.). Производство строительных материалов - перемещение плитки, стекла, рулонов утеплителей, покрывных материалов и т.п. Деревообрабатывающая промышленность - перемещение листового материала (картона, фанеры, ДСП, ДВП, слоистых пластиков и т.п.) при изготовлении, разбраковке и упаковке.
3.8.
Манипулятор сбалансированный пневматический МСП-250К1.
Предназначен для перемещения штучных грузов массой до 250 кг при погрузочно-разгрузочных, монтажных, сборочных и пр. работах, в т.ч. для взвешивания. Может комплектоваться различными захватными приспособлениями - механическими, пневматическими, вакуумными, магнитными и т.п. Манипулятор может применяться в качестве несущего устройства для крупных гайковертов, сверлильных и шлифовальных машинок, резаков и т.п. при выполнении широкого ряда технологических операций. Пневматический манипулятор является идеальным грузоподъемным средством для пожаро- и взрывоопасных производств. Манипулятор МСП-250К1 выгодно отличается от большинства аналогов следующими особенностями:
наличие устройства для визуального контроля массы груза;
автоматическая непрерывная балансировка груза во всем диапазоне грузоподъемности;
перемещение груза в вертикальной плоскости как под действием привода задающего устройства, так и простым приложением усилия оператора.
Манипулятор может монтироваться на стойке, подвижном портале или мосте, а также встраиваться в различное технологическое оборудование.
Технические характеристики:
-Номинальная грузоподъемность, кг ……………………………………..250
-Усилие оператора при перемещении груза, Н, не более ……………….50
-Размеры зоны обслуживания, мм:
-наименьший радиус ……………………………………………..260
-наибольший радиус …………………………………………….3050
-наибольшая высота подъема …………………………………..1600
-Число степеней подвижности…………………………………………… 4
-Номинальное давление сжатого воздуха, МПа………………………. 0,5
-Расход сжатого воздуха, м3/мин, не более ……………………………0,12.

Рис.5. МСП-250К1.
3.9. Робот - манипулятор Kawasaki ZD250S.
Kawasaki роботы Z-серии имеют полезную нагрузку, начиная от 130 кг. Несмотря на большую зону досягаемости, роботы Z-серии имеют малую «мертвую зону». Они осуществляют вращение на 360° по первой оси. Интегрированный пневматический и электрический контроль за клапанами позволяет быстро производить технологические операции. Вся рука робота обеспечивает защиту класса IP65 и запястье обеспечивает класс IP67.

Рис.6. Kawasaki ZD250S.
Технические характеристики:
-Грузоподъемность………………………………………………… 250кг
-Угол поворота ………………………………………………………±360°
-Максимальная скорость …………………………………………......95°/с
-Повторяемость…………………………………………………….. ±0.5мм
-Максимальная зона действия………………………………………3255мм
-Вес……………………………………………………………………1500кг.
3.10.
Пневматический манипулятор MANIBO.
Пневматический манипулятор находит широкое применение на производстве, отвечая требованиям безопасности и эргономичности.
Манипулятор "Manibo" это качество, надёжность и простота в использовании.

Рис.7.Манипулятор MANIBO.
Технические характеристики:
-Грузоподъемность…………………………………………………600кг
-Угол поворота …………………………………………………..…±360°
-Максимальная зона действия……………………………………3200мм
-Номинальное давление сжатого воздуха, МПа…………………. 0,6.
4
.
Сравнительный анализ конструкций и технологий применяемых в изделиях аналогах.
Манипуляторы, такие как модели 2/15.140005, 810H, РМ-20, МАВ-15, МСП-250К1 имею имеют пневматический привод, имеет практически все преимущества гидравлического, но лишен главного недостатка - рабочей жидкости в грузоподъемном механизме. Пневматические манипуляторы подключаются к общей системе АТП, что позволяет понизить трудоемкость обслуживания и шум на рабочем месте.
Модели 2/15.140005 и МСП-250К1 имеют маленькую мертвую зону за счет поворота вокруг оси 360º. Модель РМ-20 имеет возможность крепления на стене, полу, потолке, что дает большую возможность унификации даже в небольших помещениях. МАВ -15 имеет возможность взвешивания груза.
2/15.140005 имеет множество насадок, что позволяет перемещать различные груза.
Манипуляторы П-255, HIAB-166E-4CLX, VPL90-76, KawasakiZD250S, MANIBOимеют гидравлический привод, что позволяет повысить грузоподъемность манипулятора, быстроту работы, возможность установки практически в любое место( на подвижной состав и т.д.). Недостатки гидравлических манипуляторов: больший вес, большие габариты, установка отдельного насоса.
5.Выбор варианта для проектирования.
Проанализировав достоинства и недостатки представленных конструкций манипуляторов, в качестве варианта для проектирования выбран манипулятор пневматический модели 2/15.140005.
Таблица 5. Техническая характеристика
:
| Тип манипулятора |
стационарный |
| Грузоподъемность мах, кг |
100 |
| Усилия перемещения груза, Н |
По вертикали |
40 |
| По горизонтали |
40 |
| Давления воздуха, МПа |
0,4 – 0,63 |
| Габаритные размеры, мм |
длина |
3000 |
| ширина |
600 |
| высота |
4000 |
| Масса, кг |
550 |
| Зона обслуживания, мм |
по высоте |
0 - 1800 |
| по радиусу |
600 - 3000 |
| Поворот вокруг оси колонны, град |
360 |
| Скорость подъема и опускания груза, м/с |
0,5 |
6. Совершенствование конструкции и работы изделия.
Для повышения технологических возможностей и увеличения точности.
Манипулятор содержит квадратный корпус с крепежными отверстиями, на котором установлена с возможностью вращения круглая платформа с закрепленным на ней с возможностью возвратно-вращательного движения рычагом, на котором установлен рабочий инструмент, и два электропривода. Один из электроприводов установлен в корпусе, а второй - закреплен на рычаге. Кромка платформы выполнена зубчатой, взаимодействующей с шестерней электропривода, установленного в корпусе. На платформе жестко закреплена опорная скоба, взаимодействующая в осевом направлении с концом рычага, установлен зубчатый сегмент, взаимодействующий с шестерней электропривода, закрепленного на рычаге, и выполнен дугообразный сквозной паз с возможностью перемещения в нем рабочего инструмента. Причем дугообразный паз и зубчатый сегмент расположены концентрично по отношению к центру вращения рычага.
7. Выполнения требований технического задания
а) Требования к габаритам и весу.
Габариты и вес изделия соответствуют лучшим аналогам.
Габаритные размеры: 3000х600х4000мм.
Масса: 550кг.
б) Требования к технологичности.
В изделии используется оптимальный технологический процесс – пневматический привод, которой является наиболее эффективным при использовании в данном типе оборудования.
в) Требования к надежности.
Гарантийный срок работы оборудования соответствует требуемому – 12 лет, что обеспечивается долговечностью работы его узлов и деталей.
Процент оснащения изделия стандартными и унифицированными изделиями более 30%.
г) Требования к охране труда оператора и окружающей среды.
Охрана труда оператора обеспечивается следующими конструктивными особенностями:
- расположение крана управления в безопасном месте;
- все электроприборы агрегаты расположены в закрытом корпусе;
- электрическая сеть манипулятора надежно заземлена.
В составе манипулятора нет элементов производящих загрязнение окружающей среды, все элементы манипулятора после окончания срока годности утилизируются.
д) Требования к экономичности.
Изделие является конкурентоспособным по эксплуатационным показателям, т.к. после его внедрения в процесс обслуживания и ремонта автомобиля снижаются трудовые и материальные затраты на проведение технического процесса АТП.
8. Организация работ на производственном участке с применением разрабатываемого оборудования.
8.1. Сведения по эксплуатации изделия
а) Платформа, на которой установлен манипулятор, должна иметь габариты:
- в ширину не менее 1200мм;
- в длину не менее 1200мм;
На полу, в зоне работы манипулятора должен быть проложен рельсовый путь с шириной головки 40мм по ГОСТ 19240-73.
Расстояния между внутренними краями рельсов 748мм.
Колонна манипулятора устанавливается на платформу с помощью подъемно-транспортного оборудования грузоподъемностью не менее 500кг.
б) Организация работы на месте эксплуатации:
Включить манипулятор, повести грузозахватный орган закрепленный на кране управления к грузу, управляя ручкой крана управления. Закрепить груз на грузозахватном органе, переместить груз в необходимую точку, расположенную в зоне обслуживания манипулятора управляя ручкой крана управления.
в) Манипулятором может управлять один оператор. Требований и квалификации не предъявляется.
г) Эксплуатационные документы.
8.2. Инструкция по монтажу и пусконаладочным работам
Введение
Назначение инструкции по монтажу и пусконаладочным работам: в инструкции приведены указания по монтажу манипулятора и его регулирование перед запуском, выполнения которых обеспечивает правильную работу манипулятора.
Состав инструкции:
- введение;
- указания по мерам безопасности;
- монтаж;
- наладка и монтажные испытания;
- пуск;
- регулирование;
- комплексное опробование;
- обкатка;
- сдача в эксплуатацию;
- приложение.
Перечень документов, необходимые для пусконаладочных работ:
- техническое описание;
- инструкция по монтажу.
8.2.1. Указания по мерам безопасности
.
К работе на манипуляторе допускаются лица, ознакомленные с устройством манипулятора и приемами работы на нем, а также лица, ознакомленные с требованиями “Правил устройства и безопасной эксплуатации грузоподъемных кранов”.
На манипулятор распространяются все требования безопасной эксплуатации, изложенной в “Правилах устройства и безопасной эксплуатации грузоподъемных кранов Госгортехнадзора РФ”.
При обнаружении неисправностей прекратите работу на манипуляторе и устраните неисправности.
8.2.2. Подготовка изделия к монтажу.
Распаковку следует проводить и на месте последующей эксплуатации оборудования. Открытия упаковки выполнять по обозначением на ней.
Проверить комплектность:
- головка манипулятора………………………….………………1шт.
- платформа передвижная……………………………..…………….1шт.
- колонна с блоком подготовки воздуха……………………………1шт.
болт М16*50……………………………………………………...4шт.
гайка М16……………………………………………….…..……4шт.
хомут…….………………………………………………………..1шт.
манжета….…………………………………………………..……2шт.
- эксплуатационная документация
техническое описание и инструкция по эксплуатации………..1шт.
паспорт……………………………………………………………1шт.
упаковочный лист………………………………………………..1шт.
Требования к помещению и месту монтажа.
Высота помещения должна быть не менее 4000мм, ширина для полнофункциональной работы не менее 6000мм. Поверхность для монтажа должна быть горизонтальной, оснащенная рельсовым путем.
8.2.3. Монтаж.
Установка манипулятора производится на подвижную платформу, размеры которой указаны на странице 31. Платформа устанавливается на рельсы специального профиля ГОСТ Р 51685-2000. Для установки колонны манипулятора навернуть гайки на болты платформы. Установить колонну, смонтировать на ней манипулятор. После установки гайками выставить колонну со смонтированным на ней манипулятором так, чтобы горизонтальный паз щеки имел уклон не более 1:1000 независимо от поворота манипулятора вокруг вертикальной оси.
Установить поршень привода манипулятора в крайнее верхние положение, отвернуть пробку контроля уровня масла, залить через верхнее отверстие масло И-8А ГОСТ 20779-75 до появления его в контрольном отверстии.
Подвести к манипулятору сжатый воздух давлением 0.40 – 0.63 МПа по трубопроводу с условным проходом не менее 15мм.
8.2.4. Пуск.
Перед началом работы на манипуляторе:
- провести внешний осмотр изделия;
- слить конденсат из привода манипулятора, для чего отвернуть пробку, поднять поршень привода в крайнее верхнее положение и слить конденсат.
- открыть вентиль подводящий сжатый воздух к манипулятору;
- проверить работу манипулятора без груза на грузозахватном органе.
8.2.5. Регулирование.
- при самопроизвольном подъеме стрелы манипулятора ослабить контргайки затяжки пружин. Регулировкой пружин добиться фиксирования стрелы с грузом(без груза). Затянуть гайки.
- при самопроизвольном опускании стрелы манипулятор ослабить контргайки затяжки пружин. Поднимать пружины добиться фиксирования стрелы с грузом(без груза). Затянуть гайки.
8.2.6. Комплексное опробование.
После регулирования убедится в правильности работы изделия путем выполнения основных операций манипулятора.
8.2.7. Обкатка.
В течении срока обкатки манипулятора следует следить за подвижными соединениями, добавлять смазку. Нагружать манипулятор не более чем на 90%. Проверять регулировки манипулятора перед каждым использованием. После установки регулировок в нормальном режиме обкатка считается оконченной.
8.2.8. Сдача в эксплуатацию.
При сдачи в эксплуатацию изделия нужно опломбировать оборудования, предоставить все технические документы, касающиеся использования, технического обслуживания изделия. Провести инструктаж по технике безопасности оборудования.
9.Уровень стандартизации и унификации.
Стандартные изделия применяются при производстве данного изделия:
- пневмоцилиндры 1411-040x0000-УХЛ4ГОСТ 15608-81;
- пневмошланги ГОСТ 12.1.019-79;
- болты М16*50.58.016 ГОСТ 7798-70 (4шт);
- манжеты 2-040-1 ГОСТ 6678-72 (2шт) ;
- подшипники КК20х26х34Е ГОСТ 520-2002 (2шт);
- подшипники 819705 ГОСТ 520-2002(2шт);
- швеллер h =65мм; b = 36мм, (ГОСТ 8240-89) (2шт);
- труба d = 300мм; b = 5мм, ГОСТ 10704-91(1шт);
- хомут d = 54ммб ГОСТ 24137-80.
А также различные стандартные шайбы, гайки, болты, втулки и тд.
10. Расчеты, подтверждающие надежность и работоспособность конструкции.
10.1. Расчет пневмосистемы манипулятора.
Основными расчетными параметрами пневмоприводов являются усилие на штоке пневмоцилиндра Р,
давление воздуха в системе р
в
, величена перемещения штока S
ш
, внутренний диаметр трубопроводов d
тр
и тд.

Рис.8. Расчетная схема.
1- предохранительный клапан
2- пневмоцилиндр
3- поршень
4- шток
5- трубоповод
6- кран управления
7- ручка
Рв – давления воздуха в системе.
Исходные данные:
Р = 1200Н – усилие на штоке;
Рв = 0.6 МПа – давление в системе.
Расчет:
Толкающее усилие на штоке пневмоцилиндра определяется по формуле

где  - КПД пневмоцилиндра; q– сопративление возвратной пружины. - КПД пневмоцилиндра; q– сопративление возвратной пружины.
В расчетах обычно сопративление пружины учитывают с помощью коэффициента k = 0,98. С учетом этого формула имеет вид:

Диаметр цилиндра при толкающим усилии.
Расчетное значение D округляем до стандартного по МН 1250-60. Выбираем = 18см.
Диаметр штока:
Величину хода штока определяем из аналогов и принимаем S = 600мм.
Расход сжатого воздуха на один час работы пневмопривода определяется из выражения:

где V – объем воздуха на одно включение пневмопривода,
n – количество включений в час.

Расчет диаметра трубопровода
:
Выбираем резиновый шланг с нитяной оплеткой
[P] = 2…5МПа и = 6мм.
Проверяем на прочность:
Рв = 0,6МПа << 2 - 5МПа –допустимое давление,
Время работы
:
 = 20м/с – скорость движения воздуха по воздухопроводу. = 20м/с – скорость движения воздуха по воздухопроводу.
Расход воздуха на одно включение пневмопривода:

Расчёт механизма манипулятора.
Схема для расчёта приведена на рисунке 9. Так как манипулятор приводится во вращательное движение со стороны головки схвата, а сопротивление в подшипниках опорно-поворотного устройства пренебрежимо мало, считаем, что механизм манипулятора плоский и все нагрузки приложены в плоскости чертежа.

Рис. 9. Схема для расчёта манипулятора.
Исходные расчётные данные приведены в таблице 6.
Продольные силы не учитываются в расчетах, т.к. они пренебрежительно малы.
Таблица 6. Исходные расчётные данные.
| Наименование исходных данных и размерность |
Обозначение |
Числовое
значение
|
| Масса груза, кг. |
Q'
|
100 |
| Масса груза совместно с грузозахватным управлением, кг. |
Q |
106 |
| Масса руки и тяги, приложенная в середине руки, кг. |
G1
|
8,2 |
| Масса серьги, кг. |
G2
|
0,8 |
| Масса плеча и тяги, приложенная в середине плеча, кг. |
G3
|
7,6 |
| Масса тяги горизонтальной, кг. |
G4
|
6 |
| Масса тяги вертикальной, кг. |
G5
|
7 |
| Расстояние от оси вращения головки схвата до оси приложения внешней нагрузки, мм. |
L8
|
0 |
Размеры элементов по рисунок 9, мм:
1-4
4-6
1-2
3-5
4-5
|
L1
L2
L3
L4
L6
|
2200
1600
500
1200
600
|
1. Определим усилия, действующие на руку (элемент 4-6).
Рука воспринимает растягивание силы и изгибающие моменты. Для упрощения расчёта не будем учитывать напряжения от растягивающих руку усилий, так как они пренебрежимо малы по сравнению с напряжениями от изгиба.

Рис. 10. Расчетная схема элемента 4-6.
Рассмотрим равновесие сил, приложенных к руке в проекции на ось ”Y”.
∑Y = -Q-(G1
+G4
/2)+Y4
=0 (1) = -Q-(G1
+G4
/2)+Y4
=0 (1)
Откуда
Y4
=Q+ (G1
+G4
/2)
Подстановкой числовых значений из таблицы 6, получаем:
Y4
=1060+82+30 = 1172 Н
Равновесие сил, приложенных к руке в проекции на ось ”Х” рассматривать не имеет смысла, так как на рисунке 10, видно что силы Х4
и Х5
равны и противоположно направлены.
Поэтому рассмотрим условие равновесия моментов внешних сил относительно точки 4 на рисунке 10.
 (2) (2)
Подстановкой числовых значений из таблицы 6, получаем:

Откуда

для сил X2
= X3
получаем значение, равное 944,17 Н.
2. Определим усилия, действующие на плечо (элемент 1-4) и нижнюю тягу (элемент 2-3) по рисунку 11.
Определим усилие R3
, сжимающие тягу вертикальную (элемент 2-3).
 (3) (3)

Рис. 11. . Расчетная схема элемента.
Подстановкой числовых значений, взятых из таблицы 6, получаем:
Определим усилие Y1
, которое действует на ось 1, несущую основную нагрузку, с помощью уравнения суммы проекции сил на ось У.

(4)
Усилие Х1
определим из уравнения суммы проекций сил на ось Х.
(5)
Рассмотрим усилия, действующие на ось 3. Усилие Х3
(сопротивление горизонтальному перемещению) найдём через уравнение суммы проекций сил на ось Х.
(6)
Усилие У5
определим через уравнение суммы проекций сил на ось У.
 (7) (7)
3. Расчёт элементов манипулятора на прочность
Исходя из величин усилий, действующие на элементы манипулятора, определённых в предшествующих подпунктах, подбираем сечения рычагов, тяг, осей; выбираем соответствующие материалы и термообработку и проверяем указанные элементы на прочность по допускаемым напряжениям. Материалы и допускаемые напряжения принимаем по данным, приведённым в «Справочнике конструктора-машиностроителя» В.И. Анурьев, М., «Машиностроение»,1980 г., т. 1 стр. 84….91.
Для рычагов и тяг принимаем материал – прокатные профили, изготовленные из стали марки Ст 3 ГОСТ 380-74, оси выполняем из стали 40Х ГОСТ 4543-71. Для деталей из СТЛОХ термообработка М39, для стали 45 – термообработка М35.
4. Расчёт руки (звено 4-6), рисунок 12.
       На руку действуют внешние силы, создающие изгибающие моменты, которые являются основными для данного узла манипулятора. На руку действуют внешние силы, создающие изгибающие моменты, которые являются основными для данного узла манипулятора. На схеме расчёта по рисунку 12 «а» показаны внешние силы, на рисунке 12 «б» проекции сил на направление, перпендикулярное к продольной оси руки, на рис.12 «в» - эпюра изгибающих моментов.
Опасное сечение в сечении 1-1. Геометрическое сечение руки в сечении 1-1представлено на рисунке 13 с относящимися к нему размерами.
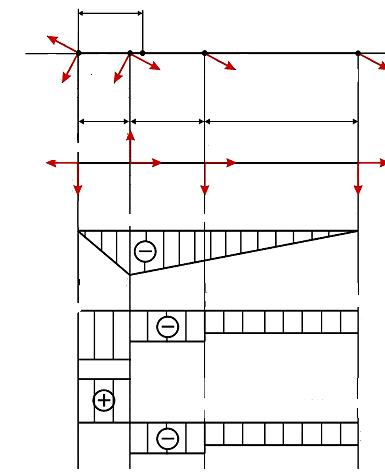
Рис.12. Схема нагрузок, действующих на руку

Рис. 13. Рис. 14.
Геометрическое сечение руки 1-1.
Расчёты геометрических характеристик сечения, представленного на рис. 13 выполняем по формулам, приведённым в литературе [4] табл..
В результате расчёта получаем:
Момент сопротивления (W):
Относительно оси Х-Х, м3

Относительно оси У-У, м3

Расстояние V0
нейтральной оси, мм 44
Напряжение в опасном сечение при номинальной нагрузке (500 Н)
 (8) (8)
Графоаналитическим методом определяем из рисунка 12 момент в сечении 1-1 (при L5
=0,3 м.). Подставляя в формулу значения момента в сечении 1-1 и момента сопротивления относительно оси Х-Х получаем:
Допускаемое напряжение для Ст.3 [GT
]=1900 кг/см2
Запас прочности по опасному сечению руки равен 5,1.
Рука выдерживает двукратную перегрузку, которая может возникнуть при резком торможении на спуске или других динамических явлениях.
Напряжения в руке в плоскости У-У невелики, так как манипулятор приводится во вращения вручную за конец руки, а момент инерции масс манипулятора, в основном сосредоточенных около оси вращения невелик. При расчёте мы их не учитываем, так как запас прочности по основным нагрузкам достаточен.
5. Расчёт плеча (звено 1-4) рисунок 15.
Так как плечо расположено горизонтально, то на рисунке 15 «а» показаны сразу проекции сил на направление перпендикулярное продольной оси плеча, на рис. 15 «б» показана эпюра изгибающих моментов.
В результате расчёта получаем:
Момент сопротивления (W):
Относительно оси Х-Х м3

Относительно оси У-У м3

Напряжения в опасном сечение от изгиба при номинальной нагрузке подсчитываем по формуле (7), графическим методом определяем из рис. 15. момент в точке 21
. Подставляя в формулу значения момента в сечении 1-1 и момента сопротивления, получаем:
Так как материал плеча такой же, как и материал руки, то запас прочности плеча в опасном сечении равен 7,9.

Рис. 15. Схема нагрузок, действующих на плечо.
Опыт эксплуатации (стендовой) макетных образцов манипуляторов, рука и плечо которых практически не отличается от тех, по которым проводится расчёт, показал, что даже при двукратной перегрузке не наблюдается остаточных деформаций в проушинах руки и плеча, которыми они соединяются между собой и крепятся к стойке и головке схвата. В силу указанных обстоятельств расчёты проушин опускаются.
6. Расчёт тяги горизонтальной (звено 2-5) рисунок 16
.
Рис. 16.
Основным напряжением для тяги горизонтальной является напряжение сжатия, при этом её следует проверить на устойчивость от сжимающих нагрузок.
Максимальная сжимающая нагрузка в тяге возникает при горизонтальном положении плеча и выдвижении руки на максимальный вылет.
Определяем геометрически сечения тяги. Так как тяга плеча прямоугольного сечения, то сразу по известным формулам подсчитываем значения:
 Момент инерции: Момент инерции:
Площадь поперечного сечения:
Радиус инерции
Определяем напряжения от сжатия по формуле:
 (9) (9)
Подставляем числовые значения в формулу (9) и получаем:

Сравниваем его с допускаемым напряжением, [4] равным 90 МПа и видим, что по сжатию и устойчивости нижней тяги имеется большой запас прочности, что гарантирует безопасность работы манипулятора по причине поломки данной детали.
|
