ФИЛИАЛ МОСКОВСКОЙ ГОСУДАРСТВЕННОЙ АКАДЕМИИ ПРИБОРОСТРОЕНИЯ И ИНФОРМАТИКИ В Г. УГЛИЧ
Кафедра «Приборы точной механики»
КУРСОВОЙ ПРОЕКТ по дисциплине «Теория, расчет и проектирование измерительных приборов» на тему : «Расчет и проектирование электрического манометра с дистанционной передачей»
| Студент Улитина О. Ю. | Шифр 96228 | | Вариант 28 | преподаватель Лемелев Л.М. |
| Подпись студента | Подпись преподавателя
| | Дата 15.06.2000 | Дата |
г. Углич 2000 г.
Электрические дистанционные манометры предназначены для выдачи визуальной информации об измеряемой давлении на некотором расстоянии от места, в котором производится измерения В комплект прибора обычно входят датчик и указатель, соединенные между собой электрической линией связи.
I.ИСХОДНЫЕ ДАННЫЕ | Измеряемое давление P[Па]: | 6*105 | | Допустимая погрешность %: | 3,2 |
| | Тип указателя: | Двух катушечный логометр с подвижным магнитом или гальванометр (рис. 1,2) | | Тип чувствительного элемента: | Мембранная коробка | | Время работы t [c]: | 2700*3,6*103 |
II.ЗАДАЧИ РАСЧЕТА. В задачи проектирования и расчета входят определения размеров конструктивных параметров прибора, электрических параметров измерительной схемы, а также электрических и механических параметров датчика указателя. Необходимо произвести расчет статических и динамических характеристик и чувствительности измерительного преобразователя и прибора в целом. Кроме того следует рассчитать и построить шкалу прибора, определить динамические характеристики преобразователя в целом, рассчитать его погрешности и надежность. III. Содержание расчетно-пояснительной записки | 1. ВВЕДЕНИЕ |
| | 2. РАСЧЕТ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК А) Расчет чувствительного элемента Б) Расчет передаточно-множительного механизма В) Расчет параметров электрической схемы Г) Расчет логометра с подвижным магнитом Д)Расчет цифрового выхода |
| | 3. РАСЧЕТ ДИНАМИЧЕСКОЙ ХАРАКТЕРИСТИКИ | 15 | | 4. РАСЧЕТ И АНАЛИЗПОГРЕШНОСТЕЙ | 16 | | СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ | 21 |
ВВЕДЕНИЕ В электрических манометрах в качестве чувствительных элементов применяются гофрированные мембраны, мембранные коробки, манометрические трубки и сильфоны. Для преобразования деформации упругих элементов в электрический сигнал применяются либо омический (потенциометрический) преобразователь, либо индуктивный преобразователь, преобразующий перемещение чувствительного элемента в электрический сигнал, удобный для дистанционной передачи. В измерительных схемах осуществляется также компенсация температурных погрешностей прибора. В качестве указателей в манометрах обычно применятся логометры с подвижным магнитом. В соответствии с [2, стр. 173] и рис. 1, выбираем манометр серии ЭДМУ. 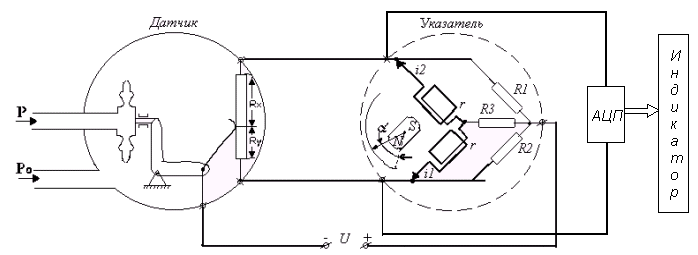 Рисунок 1. Схема электромеханического дистанционного манометра с двух рамочным магнитоэлектрическим логометром. Функциональная схема прибора представлена на рис. 2.

Рисунок 2. Функциональная схема. Звено 1 – мембранная коробка, преобразующая давление P в перемещение жесткого центра коробки, =f1(P). Звено 2 – передаточно-множительный механизм, преобразующий перемещение центра мембранной коробки в перемещение движка потенциометра , Y=f2(). Звено 3 – потенциометр, преобразующий перемещение щетки потенциометра Y в изменение отношения сопротивлений  , ,  . . Звено 4 – электрическая схема, которая преобразует отношения сопротивлений потенциометра в изменение отношения токов  в рамках логометра, в рамках логометра,  . . Звено 5 – логометр, преобразующий изменения соотношений токов в угловое перемещение подвижной системы указателей 
РАСЧЕТ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК Характеристика чувствительной характеристики прибора необходимо предварительно рассчитать характеристики отдельных звеньев прибора. Это позволяет рассчитать чувствительность прибора и построить его шкалу. А) Расчет чувствительного элемента Характеристика чувствительного элемента может быть представлена зависимостью перемещения чувствительного элемента от измеряемого давления P  В нашем случае в качестве чувствительного элемента задана мембранная коробка. Характеристику мембраны трапецеидального профиля можно определить по формуле
| 
|
(1) |
где P – измеряемое давление; - прогиб центра мембраны [м]; R – рабочий радиус мембраны [м]; a,b – коэффициенты зависящие от формы профиля мембраны h – толщина материала мембраны [м]; Е – модуль упругости материала (Е=1.2*108 Па для БрБ-2.5). Следуя указаниям из [4, стр. 472..475] принимаем R=0.04, h=0.002, a=48, b=0.042 и выразив из (1) получим =0.008.
Б) Расчет передаточно-множительного механизма Находим зависимость 1=f2() где 1 – угол поворота щетки потенциометра. Принимаем передаточное отношение механизма i=10. Тогда имеем:  При малых углах поворота (1) перемещение щетки потенциометра можно считать пропорциональным углу поворота, т.е.: y=lЩ1, y=0.98 см где lЩ – длина щетки до оси вращения(lЩ=3.5 см.) (радиус потенциометра). Изменение сопротивления одного из плеч потенциометра функционально связано с перемещением y щетки потенциометра RX=f4(y) и для линейного потенциометра  где y0 – полная длина намотки потенциометра.(y0=1.2 см). R0 – сопротивление потенциометра 255 Ом.  Далее найдем зависимость сопротивления RX давления P,.т.е. 
Далее рассчитаем конструктивные параметры потенциометра. Средняя длина витка потенциометра  где b и h – ширина и высота каркаса (b=5 мм. h=4 мм)  Диаметр проволки  где RП – сопротивление потенциометра в ом; l0 – средняя длина витка в мм; lН – длина намотанной части потенциометра (lН=12 мм) - удельное сопротивление в ом*мм2/м. (1.1 ом*мм2/м) d=0.034 мм Число витков намотки потенциометра 
В) Расчет параметров электрической схемы При расчете электрической схемы следует определить зависимость  где I1 и I2 токи в рамках логометра. При расчете плеч моста R1=R2=R и обозначив R0=RX+RY, характеристика электрической схемы имеет вид:  Г) Расчет логометра с подвижным магнитом. Расчет логометра разделяется на две части Определение необходимого характера кривых моментов и характеристики шкалы логометра Расчет собственного измерительного механизма (параметры рамки, коэффициент усиления и т.д.). Зависимость угла поворота подвижной системы от отношения токов в рамках, для монометра типа ЭДМУ можно определить из формулы:  при I1=0.0002 A I2=0.022 A =29.9 0 Д)Расчет цифрового выхода Реализовать АЦП достаточно просто, используя цифроаналоговый преобразователь (ЦАП) на однокристальной микросхеме К572ПА1, операционный усилитель К140УД9 и компаратор напряжения К554СА3. Рассмотрим более подробно компаратор напряжения К554СА3. Компаратор осуществляет переключение выходного напряжения, когда изменяющийся выходной сигнал становится выше или ниже определенного уровня. Компаратор принадлежит к классу формирователей, предназначенных для перехода от аналоговых сигналов к цифровым. Поэтому оконечные каскады компараторов обычно конструируют таким образом, чтобы выходное напряжение соответствовало бы принятым логическим уровням распространенных цифровым микросхем. Компаратор напряжения К554СА3 может питаться как от +-15 В так и +-9 В и даже +-5 В связи с этим применение компаратора становится разнообразным. ПНК последовательного счета строятся либо по классическому методу последовательно, либо с промежуточным преобразованием входного напряжения в какую либо другую аналоговую величину. Промежуточное преобразование снижает точность измерения тем не менее именно по этому методу строились, в основном цифровые измерители напряжения. Это объясняется тем, что ЦАП(преобразователь напряжение код) реализующие классический метод последовательного счета содержат формирователь ступенчатого эталонного напряжения, реализация которого на дискретных элементах приводила к большому объему оборудования по сравнению с другими типами ЦАП. Однако положение изменилось с развитием интегральной технологии и в настоящее время ЦАП исполняется в корпусе одной интегральной микросхемы Измеренное напряжение высвечивается на индикаторах типа АЛС324Б предварительно пройдя через двоично-десятичные счетчики типа К155ИЕ2и дешифраторы КР514ИД2. Расчет основных параметров АЦП. Микросхема К572ПА1 имеет следующие характеристики: Число разрядов: n=10 Максимальная нелинейность  Температурный коэффициент нелинейности  Время установления выходного сигнала при изменении цифрового сигнала на входе 500 нс. Расчет метрологических характеристик АЦП (допустимой средне квадратичной погрешности преобразования (измерения) (ПР), величины амплитудного кванта (ПР), величины кванта (d)):  Число разрядов 
Величина временного кванта 
Период следования тактовых импульсов: 
Частота тактовых импульсов  Расчет и выбор элементов генератора тактовых импульсов (ГТИ) Г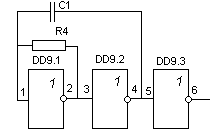
ТИ нетрудно реализовать используя интегральную микросхему К555ЛН1 см. рис. 5. Рисунок 4.Генератор тактовых импульсов Частоту генерируемых импульсов можно найти по формуле
| 
|
(5) |
где С1 – емкость конденсатора С1 R4 – сопротивление резистора R4 (R4=220 Ом) Зная fИМП и R4 можно определить емкость конденсатора С1 по формуле 5 С1=4.7 пФ Исходя из полученных данных выбираем следующие микросхемы: К554СА3 компаратор OP27A операционный усилитель фирмы Analog Devises К572ПА1 ЦАП
РАСЧЕТ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК С помощью структурной схемы (рис.3) определяется передаточная функция прибора. Динамический расчет производим из условия постоянной чувствительности прибора во всем рабочем диапазоне измерения. Определяем передаточные функции звеньев.
С 
труктурная схема (с логометром)  
Wp(p)
Wc(p)
W2(p)
W3(p)
W4(p)
W5(p)
W0(p) P P’ FДВ У RX
Рисунок 4
Передаточная функция W1 состоит из трех звеньев: А) подводящего трубопровода  , , где Т0 – постоянная времени Постоянной времени можно пренебречь, и тогда получим  Б) чувствительного элемента – мембранной коробки  , , FЭФ – эффективная площадь чувствительного элемента( в нашем случае(FЭФ=2R при R=0.02 FЭФ=0.013 м)  В) подвижной системы  , , где КД – приведенный коэффициент демпфирования , СЖ – приведенный коэффициент жесткости, Т – постоянная времени воздушного демпфера, в качестве которого служит мембрана чувствительно элемента. м – приведенная масса подвижных частей.
Передаточная функция второго звена W2 – передаточно-множительного механизма  Передаточная функция 3-го звена W3 – потенциометр  Передаточная функция 4-го звена W4 –электрическая схема   На основании расчета характеристик отдельных звеньев прибора можно определить его чувствительность S S=S1S2S3S4S5
4.Расчет и анализ погрешностей
При расчете суммарной погрешности следует учитывать систематическую составляющую инструментальной погрешности, как наиболее характерную для данного типа прибора. Суммарная погрешность находится по следующей формуле  где 1 – погрешность мембраной коробки, которая складывается из погрешностей изменения жесткости мембраны во времени и неточностей изготовления. Эти погрешности нормируются при проектировании и изготовлении и они не превышают 0.5% (1=0.5%) 2 – погрешности передаточно-множительного механизма, вызванные наличием зазоров, люфтов и влиянием температуры. Компенсируется подбором материалов и конструктивными способами. 3 – погрешность потенциометра; складывается из витковой и технологических погрешностей Максимальная величена витковой погрешности выражается по следующей формуле:  
4– суммарная погрешность логометра. Принимается равной 0.9 % Исходя их этого получим =1.64 % СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ Берендс Д.А. и Ко, Методическое руководство по курсовому проектированию по дисциплине « Теория, расчет и проектирование измерительных приборов», М.,1981 г. Браславский Д.А. Приборы и датчики летательных фппаратов. М.: Машиностроение, 1970 г. Боднер В.А Авиационные приборы. М. :Машиностроение, 1969 г. Г.А. Веркович и К0 Справочник конструктора точного приборостроения С-П: Машиностроение 1989 г. Асс Б.А., Антипов Е.Ф., Жукова Н.М. Детали авиационных приборов. Изд. 2-е. М. : Машиностроение, 1966 г. |
