|
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1. УПРАВЛЯЮЩИЙ КОМПЛЕКС ТАНКЕРА
1.1 Группы комплексной автоматизации судов
1.2 Комплексная автоматизация управления вспомогательными механизмами энергетических установок и судовых систем
1.3 Структура управляющего комплекса
1.4 Конструктивное построение управляющего комплекса
2. ОПИСАНИЕ СИСТЕМ НЕФТЕНАЛИВНОГО ТАНКЕРА "ПОБЕДА"
2.1 Общие сведения
2.2 Общее расположение и архитектура судна
2.3 Техническое описание системы кондиционирования воздуха
2.3 Противопожарная система
2.4 Осушительно-балластная система
3. АНАЛИЗ ПОДСИСТЕМ СУДНА
3.1 Подсистема пожаротушения
3.1.1 Водяное пожаротушение
3.1.2 Спринклерная система пожаротушения
3.1.3 Система орошения палубы водой
3.1.4 Система инертных газов
3.1.5 Система пенотушения
3.2 Подсистема кондиционирования воздуха
3.3 Осушительно-балластная подсистема
4. АЛГОРИТМИЧЕСКАЯ СТРУКТУРА КОНТРОЛЯ И УПРАВЛЕНИЯ
4.1 Алгоритм первичной обработки сигналов с датчиков и выработки экстренных сообщений
4.2 Алгоритм проверки на достоверность
4.3 Алгоритмы фильтрации
4.4 Алгоритм проверки на технологические границы
5. ТЕХНИЧЕСКАЯ СТРУКТУРА СИСТЕМЫ
5.1 Выбор датчиков
5.2 Выбор исполнительных механизмов
5.3 Расчет разрядности АЦП и МК
5.4 Схема соединения устройств автоматизации
5.4.1 Общие характеристики модулей серии ADAM-4000
5.4.2 IBM PC-совместимый контроллер связи ADAM-4500
5.4.3 Модули аналогового ввода серии ADAM-4000
5.4.4 Восьмиканальный модуль аналогового ввода ADAM-4017
5.4.5 Модули аналогового вывода серии ADAM-4000
5.5 Конструктивное исполнение разработки
6. ТЕХНИЧЕСКАЯ РЕАЛИЗАЦИЯ СИСТЕМЫ КОНТРОЛЯ
6.1 Реализация диспетчерского уровня системы
7. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ПРОЕКТА
7.2 Обоснование выбора аналога для сравнения
7.3 Обоснование критериев сравнения разрабатываемого устройства с аналогом
7.4 Расчет затрат на этапе проектирования
7.5 Расчет трудоемкости разработки программного продукта
7.6 Стоимостная оценка разработки
8. БЕЗОПАСНОСТЬ И ЭКОЛОГИЧНОСТЬ ПРОЕКТА
8.1 Оценка напряженности работы оператора ПЭВМ
8.2 Санитарно-гигиенические требования к условиям труда операторов
8.3 Оценка возможности возникновения чрезвычайной ситуации
8.4 Экологичность проекта
Реклама

9. СОЦИАЛЬНАЯ ЗНАЧИМОСТЬ РАБОТЫ
ЗАКЛЮЧЕНИЕ
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
ПРИЛОЖЕНИЯ
ВВЕДЕНИЕ
На судах торгового флота отдельные устройства и приборы механической, гидро- и электроавтоматики стали нормой оборудования только после второй мировой войны. Они появились на основе опыта разработки и эксплуатации соответствующих корабельных установок. Первоначальный этап автоматизации судов отличался бессистемностью. Автоматизировались отдельные судовые механизмы, установки, чаще всего вспомогательные. Так появились авторулевые, дистанционно управляемые насосы, дизель-генераторы и т. д. При этом автоматика, производившаяся фирмами - изготовителями установок, имела пеструю и взаимно несовместимую физическую основу и элементную базу - от чистой механики и до электронно-ламповой техники.
Резкий скачок в развитии судовой автоматики наблюдался в 60 - 70-е гг., когда она стала экономически выгодной, позволяя оптимизировать режимы эксплуатации судов. В это время была разработана и проверена в эксплуатации автоматизация основных судовых установок и механизмов - от главного двигателя и до общесудовых систем и грузового оборудования. Однако вся эта автоматика состояла из малонадежных разнородных локальных устройств. Их обслуживание и ремонт в море силами экипажа были на грани возможного.
Появление надёжных, помехоустойчивых и экономичных аналоговых и логических микросхем и особенно микропроцессоров, а также совершенствование и миниатюризация исполнительных электромеханических элементов и датчиков предоставили качественно новую электрическую элементную базу для современного - этапа развития автоматизации судов. Этот этап, начавшийся с внедрения микроэлектронных ЭВМ в судовые системы управления, характерен следующими особенностями:
- комплексным системным характером автоматизации, охватывающей все стороны функционирования судна как специфического транспортного средства во всей их взаимосвязи;
- сбалансированным распределением высших функций управления между человеком и управляющей ЭВМ с учетом эргономических, психологических и экономических требований;
- использованием математизированных моделей управления и автоматическим отысканием оптимума по заданному критерию, использованием самонастраивающихся и обучающихся структур на основе мощных ЭВМ, предоставляющих возможность иметь обширную библиотеку программ.
Целью данного дипломного проекта является - разработка микропроцессорной системы контроля состояния подсистем танкера, с использованием современной элементной базы и алгоритмов контроля и управления.
Реклама

1.
УПРАВЛЯЮЩИЙ КОМПЛЕКС ТАНКЕРА
1.1 Группы комплексной автоматизации судов
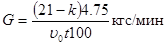
Все установки и системы судов по охвату комплексной автоматизацией судна (КАС) принято подразделять на следующие взаимосвязанные группы, системы (рис. 1.1).

Рис. 1.1 Группы комплексной автоматизации судна
1. Компьютерная система эксплуатационно-организационного и экономического планирования рейса, характеризующаяся связями с береговыми системами управления - пароходства, фрахтовых организаций, грузополучателей и грузоотправителей. Для грузового судна эта система носит обычно вспомогательный характер, задавая некоторые обобщенные исходные данные для кораблевождения и грузоопераций. Однако для таких судов, как пассажирские, рыбопромысловые, паромы и др. с развитой сетью обслуживания, учета, эта система имеет большую самостоятельную роль и использует центральную ЭВМ общего применения.
2. Система автоматизированной грузообработки, решающая задачи загрузки и выгрузки грузов, их размещения в судовых помещениях с учетом совместимости и портов назначения, учета их вида, количества, массы. При этом производятся расчеты осадки, крена и дифферента, напряжений в связях корпуса, оцениваются остойчивость судна, допустимые пределы крена на волнении и т. п. При специальных грузах (нефть, замороженная рыба, фрукты) эта система, в этом случае имеющая особый пост управления грузооперациями (ПУГО, рис. 2) обеспечивает управление операциями по активному хранению грузов (создание и поддержание пожаровзрывобезопасной атмосферы в танках, надлежащего процесса замораживания и вентиляции трюмов).
3. Система судовождения, решающая с помощью специализированной навигационной ЭВМ (НВМ) навигационные задачи (расчет курсов, времени поворотов, периодического определения места судна по спутниковым и радионавигационным системам, ведение текущего счисления и прокладки), задачи безопасного расхождения с судами и другими препятствиями с помощью РЛС, задачи коррекции курсов в соответствии с метеопрогнозами и т. д.
4. Система автоматического управления энергетическими установками судна, в первую очередь его главной энергетической установкой (ГЭУ) и вспомогательными механизмами (ВМ) - наиболее традиционная для судовой автоматики - обеспечивает безвахтенное обслуживание машинного отделения (МО) посредством управляющей ЭВМ и системы централизованного контроля (СЦК), вырабатывая алгоритм и необходимые управляющие воздействия для пуска и остановки ГЭУ, маневровых режимов, отыскания и стабилизации наиболее экономичных маршевых режимов; обеспечивает согласованную работу всех вспомогательных механизмов, устройств подготовки топлива, электропитания и т. д.
5. Система управления общесудовыми системами (СС) - водяными, вентиляционной, отопительной, кондиционирования, противопожарной, бытового обеспечения экипажа и пассажиров, обеспечивающая дистанционное управление с мостика швартовными операциями, якорными устройствами, процессами дифферентовки и балластирования судна и т. д. Для этой системы характерна сеть рассредоточенных объектов управления, требующих использования принципов телеуправления и телесигнализации. При наличии ПУГО там размещается часть управления и контроля судовых систем.
Все эти системы в большей или меньшей степени взаимодействуют друг с другом не только через управляющую судном ходовую вахту и центральную ЭВМ в ходовой рубке (ХР), но и путем обмена сигналами взаимоблокировок, синхронизации, информацией общего характера. Современные судовые автоматизированные комплексы, пройдя стадию высокой централизации, когда все процессы управления формировались единственной на судне мощной ЭВМ, теперь строятся по пирамидальной иерархической структуре, обеспечивающей живучесть системы в целом и сохраняющей большую часть своих функций при повреждении какого-либо звена структуры.
Самый верхний уровень иерархической структуры управления судном, представленный взаимодействующими оператором ЦПУ, вахтенным штурманом и рядом ЭВМ - навигационной (НВМ), центральной (ЦВМ) и управляющей (УРМ), - получает и контролирует наиболее обобщенную информацию о состоянии судна и его устройств, принимает генеральные решения по управлению, не разбитые на отдельные алгоритмические цепочки и без конкретных адресов. Таким решением может быть, к примеру, перекачка рассчитанной по остойчивости судна части топлива с борта на борт для устранения крена. Ни цистерны, содержащие подлежащее перекачке топливо, ни номера насосов и клапанов топливных магистралей на этом верхнем уровне не уточняются.
Команда пересылается в расположенный ниже иерархический уровень - уровень подсистем. Установленная в ЦПУ судна одна из микроЭВМ, обслуживающая судовые системы (СС) и специализированная на решении задач данного класса, пользуясь сигналами о заполнении цистерн, состоянии магистралей и т. п., а также вариантами программ, записанных в памяти ПЗУ, анализирует имеющиеся обстоятельства и, выбрав вариант, определяет подлежащие пуску конкретные узлы системы.
Генеральные команды пуска и режима этих узлов передаются в соответствующие звенья еще более низкого иерархического уровня, уровня управляющих блоков. Аппаратура этого уровня выполнена на основе наборов логических микросхем, а в последнее время - микропроцессоров и микроконтроллеров, с обеспечивающими логическими устройствами. Она вырабатывает (чаще всего по некоторой заранее заданной, жесткой программе) набор управляющих сигналов, распределенных во времени и пространстве (по объектам) и адресованных конкретным локальным регуляторам и управляющим устройствам. Связи между звеньями аппаратуры этого уровня позволяют исключить запредельные режимы, неразрешенные состояния. Сигналы, передающиеся в самый нижний уровень автоматики, обычно подвергаются цифроаналоговому преобразованию.
Устройства локальной автоматики размещаются непосредственно на объектах управления и локальных постах машинного отделения МО с дублированным ручным управлением. На рисунке 1.2 указаны следующие локальные посты: у дизельной ГЭУ, вспомогательных механизмов ВМ, механизма изменения шага винта (МИШ), пост рулевой машины (РМ), установки инертных газов (СИГ), дизель-генераторов (ДГ), насосных станций (НС), якорно-швартовных устройств (ЯШУ) на баке и юте, в выгородке подруливающего устройства (ПРУ), у шлюпбалок и на верхней палубе у аварийного дизель-генератора (АДГ).
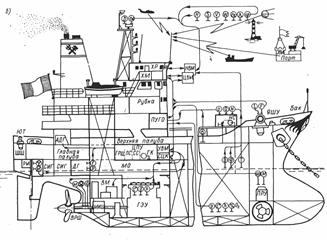
Рис. 1.2 Локальные посты автоматики
Устройства локального нижнего уровня автоматики обеспечивают непосредственное управляющее воздействие на объекты и измерение контролируемых величин, в силу чего локальные регуляторы и стабилизаторы построены преимущественно на электромеханических и электрогидравлических механизмах и датчиках, которые имеют аналоговый характер действия.
Результаты исполнения команд, воспринятые измерительными датчиками и сигнализаторами, в виде соответствующих наборов сигналов передаются наверх, по пути подвергаясь обработке и обобщению соответственно уровню иерархической структуры. В конце концов, обширная конкретная информация об исполнении задачи перекачки топлива может отобразиться перед оператором зажиганием какого-то сигнального светодиода на мнемосхеме судовых систем, размещенной, скажем, в ПУГО.
Доля комплексно автоматизированных судов мирового флота сегодня составляет 60... 70 %, причем в их число входят все крупные суда, водоизмещением более 20 тыс. т. Регистр России, присваивая вновь построенному или модернизированному судну классификационный символ, отмечает и уровень его автоматизации.
Конкретные требования к свойствам и устройствам автоматизации отдельных судовых установок и систем для судов разных типов определяются периодически обновляемыми Правилами Регистра России, в которых учитывается достигнутый технический уровень и опыт, накопленный морской практикой.
1.2 Комплексная автоматизация управления вспомогательными механизмами энергетических установок и судовых систем
Назначение и особенности вспомогательных механизмов энергетических установок и судовых систем. Вспомогательные механизмы предназначены обслуживать энергетические установки и общие нужды судна. Вспомогательные механизмы энергетических установок обеспечивают охлаждение машин, смазку, подачу топлива и воздуха в машинное и котельное отделения. Общие нужды судна обслуживаются системами для удаления и принятия водяного балласта, удаления трюмной воды, тушения пожара, снабжения пассажиров и команд питьевой и мытьевой водой, вентиляции судовых помещений и т. п. Системы управления этими объектами включают большое число запорных клапанов и АЭП.
Судовыми системами принято называть совокупность вспомогательных механизмов: напорных средств, трубопроводов, арматуры и приводов управления, предназначенных для перемещения жидкостей и газов, поддержания заданного давления и температуры, необходимых для обеспечения всех нужд судна.
Для работы вспомогательных механизмов энергетических установок и судовых систем, а также органов управления ими характерно то, что они должны находиться в одном из двух устойчивых состояний (включено — выключено, открыто — закрыто), определяемых режимом работы установок. Управление механизмами осуществляется в соответствии с алгоритмом, определяющим заданную последовательность выполнения операций.
При нулевом уровне автоматизации управления включение и выключение механизмов в заданной последовательности осуществлялось вручную и не обеспечивало требуемого качества и надежности управления, особенно в аварийных ситуациях. При этом требовалось значительное время для выполнения операций и наличие большого количества обслуживающего персонала, ввиду территориальной рассредоточенности установок. Поэтому возникла необходимость в автоматизации процессов управления отдельными механизмами и устройствами — первый уровень автоматизации управления. В дальнейшем перешли к автоматизации отдельных локальных систем (система управления энергетической установкой, САУ электроэнергетической системой и др.) — второй уровень автоматизации.
Необходимость централизации управления совокупностью локальных систем из ЦПУ, а также необходимость повышения эффективности эксплуатации судов, ликвидации вахт и дежурств потребовали создания управляющего комплекса вспомогательными механизмами энергетических установок и судовых систем — третий уровень автоматизации.
Вопросы проектирования управляющего комплекса. При проектировании управляющего комплекса выполняются: 1) формализация алгоритмов управления отдельного ОУ и алгоритмов централизованного контроля и управления совокупностью объектов управления; 2) разработка функциональных схем, реализующих заданные алгоритмы и отвечающих принятым критериям; 3) определение типа и мощности двигателей к ОУ, выбор элементной базы; 4) преобразование функциональных схем в принципиальные, отражающие размещение и компоновку элементов систем и комплекса, а также реализация принципиальных схем на типовых элементах.
Одним из наиболее ответственных этапов, является этап формализации алгоритма управления и контроля. В качестве примера рассмотрим алгоритмы управления вспомогательными механизмами транспортного судна, обеспечивающие автоматический, пуск и остановку дизель-генераторной установки, а также главного двигателя. Процесс введения в действие главной энергетической установки судна, как правило, начинается с запуска дизель-генератора, а затем главного двигателя. При этом должен выдерживаться определенный порядок включения механизмов и устройств с соблюдением ряда условий. Кроме того, должна быть предусмотрена возможность введения в действие резервного агрегата или установки. Так как запуск силовой установки производится без участия оператора, то необходимо составить подробные алгоритмы управления.
1.3 Структура управляющего комплекса
В состав управляющего комплекса вспомогательных механизмов и судовых систем входят объекты управления ОУ, автоматизированные приводы АП, системы связанного управления ССУ, системы обработки и системы представления информации СОИ и СПИ, системы контроля и пульты управления. Однако состав и характеристики элементов комплекса обладают определенной спецификой. Объектами управления в данном случае являются вспомогательные механизмы и судовые системы: насосы различного назначения, вентиляторы, воздуходувки, компрессоры, запорная арматура и т. п., рассредоточенные по всему судну.
В соответствии со структурой комплекса на его функциональной схеме (рис. 1.3) выделены следующие уровни автоматизации управления.
Нулевой уровень — ручное управление РУ отдельными объектами.
Первый уровень — дистанционное управление, которое обеспечивается с помощью автоматизированных приводов АП.
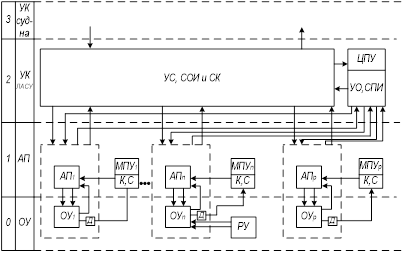
Рис. 1.3 Функциональная схема уровней автоматизации
Управление приводами осуществляется с местных постов управления МПУ, оснащенных необходимой контролирующей аппаратурой. При этом возможны два вида, управления: без обратной связи по регулируемым параметрам и с обратными связями.
Второй уровень автоматизации управления — управляющий-комплекс локальных систем управления, в состав которого входят собственно система управления УС, обеспечивающая выполнение операций в соответствии с заданными алгоритмами по управлению рядом объектов, а также системы обработки информации СОИ и контроля СК. В нормальных условиях локальная управляющая система ЛАСУ обеспечивает функционирование системы без участия оператора. В случае необходимости изменения режима или аварии оператор может на основе информации, получаемой от системы представления информации СПИ, подавать команды, с помощью управляющих органов УО поста управления. Пост управления может быть расположен на ходовом мостике — центральный пост управления ЦПУ — или в машинном отделении.
Третий уровень автоматизации управления — управляющий комплекс судна, который обеспечивает управление совокупностью УК ЛАСУ на основе алгоритмов централизованного управления и контроля.
1.4 Конструктивное построение управляющего комплекса
Особенности автоматизации судовых систем определяются не только их составом и связями между основными элементами, но и схемой размещения, а также конструктивным исполнением этих элементов. Обычно управляющая система конструктивно реализуется в виде блоков аппаратуры, расположенных в ЦПУ и МПУ, причем последние размещаются, как правило, в тех же помещениях, где находятся ОУ. В состав комплекса входят также АП, датчики и сигнализаторы. На лицевую панель ЦПУ выводятся ключи дистанционного управления системой, кнопки управления, контрольные приборы, табло и мнемосхемы.
Система управления и система обработки информации могут компоноваться в виде отдельных конструктивных блоков или размещаться в пультах ЦПУ и МПУ, причем в МПУ может выполняться предварительная обработка информации, поступающей от датчиков, а также усиление сигналов управления. Связь между ЦПУ и МПУ может осуществляться по телемеханическим системам связи с электрическим, временным или частотным разделением сигналов. В системах с электрическим разделением сигналов каждый сигнал подается по своей линии связи. Такие системы просты по устройству и надежны в работе, однако при большом числе ОУ резко возрастает число подводимых кабелей, трудоемкость прокладки которых лимитирует применение систем данного вида. Системы с временным или частотным разделением требуют введения дополнительных устройств, осуществляющих телемеханические связи.
Проектирование автоматизированной системы производится в соответствии с характеристиками объекта управления — вспомогательных механизмов, предназначенных для обслуживания силовых установок и судовых систем. Наиболее часто встречающимися вспомогательными механизмами являются насосы и вентиляторы. Расход пара на эти механизмы обычно составляет 10-20% общего расхода пара на судне, а в некоторых режимах - до 30%. Таким образом, вспомогательные механизмы в значительной степени определяют экономичность установки в целом. Автоматизированный электропривод вспомогательных механизмов позволяет снизить расход пара на 15-20% по сравнению с его расходом паровыми вспомогательными механизмами. Этим объясняется широкое применение электрифицированных вспомогательных механизмов на судах с пароэнергетическими установками. На судах с тепловыми двигателями наиболее удобным и экономичным средством распределения энергии также является АЭП. Поэтому в настоящее время все вспомогательные механизмы электрифицированы. Кроме экономии в расходе топлива АЭП вспомогательных механизмов обеспечивает большую готовность к действию и возможность дистанционного управления и автоматического пуска механизма в зависимости от режима работы установки. Это повышает надежность работы, облегчает эксплуатацию установки и позволяет уменьшить численность обслуживающего персонала. На основании вышеизложенного материала определим функциональную схему системы (приложение 4).
2. ОПИСАНИЕ СИСТЕМ НЕФТЕНАЛИВНОГО ТАНКЕРА
"ПОБЕДА"
2.1 Общие сведения
Назначение судна – перевозка нефти и нефтепродуктов, одновременно до 4-х сортов с возможностью выгрузки любого из них в различных портах.
Район плавания – неограниченный. Тип судна – одновинтовой, однопалубный, дизельный танкер с баком, с кормовым расположением машинного и насосного отделений и жилых помещений, с наклоном в крейсерской нормой, срезанной по типу транца выше ватерлинии, с двойным дном, двойными бортами и одной продольной переборкой в танковой части.
Главные размерения:
- длина наибольшая 242,8 м
- длина между перпендикулярами228,0 м
- ширина 32,2 м
- высота борта у миделя18,0 м
- спецификационая осадка с грузом
плотностью  =0, 81 т/м3 и полными запасами12,50 м =0, 81 т/м3 и полными запасами12,50 м
- осадка по летнюю грузовую марку13,62 м
- наименьшая теоретическая высота между палубных пространств в жилых и служебных помещениях2,40 м
- высота двойного дна в р-не 28-70 шп2,15 м
- высота двойного дна в р-не 70 – 110 шп2,40 м
- ширина двойного борта в танковой части 2,00 м
- погиб бимсов верхней палубы0,50 м
- седловатость верхней палубы:
на носовом перпендикуляре481 мм
на кормовом перпендикуляре1013 мм
Водоизмещение судна в морской воде плотностью 1,025 т/м3 при осадке по летнюю грузовую марку составляет около 84500 т.
При перевозке груза плотностью = 0,81 т/м3 с полностью заполненными танками водоизмещение судна в морской воде при 50% запасов составляет около 75000 т. при посадке 12,15 м.
Вместимость (нетто) грузовых танков – 71100м3. На судне имеется 16 грузовых танков – по 8 танков с каждого борта, из которых танки № 8 являются отстойными. Грузовые танки по количеству сортов одновременно перевозимого груза разделены на 4 группы. Изолированный балласт располагается в двойном дне, двойных бортах и пиках. Таблицы вместимости грузовых танков и балластных систем приведены в приложении 2.
2.2 Общее расположение и архитектура судна
Судно выполнено однопалубным, с баком и с 6-ти ярусной прямостенной рубкой в кормовой оконечности. Жилая часть рубки сформирована в 4-ярусный блок башенного типа, отделённый от шахты МКО и дымоходов. Корпус судна разделен на 11 водонепронецаемых отсеков 10 поперечными переборками.
Расположение на судне противопожарных переборок, выгородок дверей и изоляции соответствует требованиям пожарной безопасности. Комплекс жилых помещений спроектирован с учетом возможности их обстройки модульными конструктивными элементами, выполненными в размерной системе М 100.
2.3 Техническое описание системы кондиционирования воздуха
Система кондиционирования воздуха предназначена для искусственной обработки воздуха, подачи его в помещения судна с целью обеспечения и поддержки в них комфортных параметров воздушной среды (температуры, влажности, подвижности, газового состава).
Система кондиционирования обслуживает жилые, общественные, медицинские и служебные помещения с длительным пребыванием членов экипажа.
Система кондиционирования воздуха обеспечивает:
летом при параметрах наружного воздуха
 С и С и  в помещениях в помещениях  С и С и  ; ;
зимой при параметрах наружного воздуха
 С и С и  в помещениях в помещениях  С и С и  . .
В тех случаях, когда не требуется ни охлаждение, ни нагрев воздуха, наружный воздух, очищенный от пыли нагнетается к воздухораспределителям. В этот период теплоноситель и хладон к теплообменникам не подается.
Приемный трубопровод состоит из воздухозаборных устройств, решеток, газонепроницаемых крышек, грибовидной головки и предназначен для подвода смеси наружного и рециркуляционного воздуха к центральным и автономному кондиционеру.
Центральные кондиционеры "Бриз-30" и "Бриз-56" предназначены для очистки и тепловлажностной круглогодичной обработки подаваемого в помещения воздуха. Перечень оборудования и арматуры подсистемы кондиционирования воздуха приведен в таблицах 2.2. и 2.3.
Таблица 2.2. Перечень оборудования подсистемы кондиционирования
| Судовой номер
|
Наименование
|
Место расположения
|
| Помещение
|
Шпангоут
|
Борт
|
Палуба
|
| 1
|
Кондиционер "Бриз-56"
|
Помещение кондиционеров
|
84-86
|
Пр.
|
ВП
|
| 2
|
Кондиционер "Бриз-30"
|
85-86
|
Лев.
|
ВП
|
| 3
|
Кондиционер "Бриз-56"
|
88-90
|
Пр.
|
ВП
|
| 4
|
Кондиционер "Бриз-30"
|
88-90
|
Лев.
|
ВП
|
| 5
|
Автономный кондиционер АКМГ10-30У-1
|
Тамбур медблока
|
72-73
|
Лев.
|
ВП
|
| Подогреватель воздуха ПВПМ2-6,3
|
Тамбур медблока
|
72-73
|
Лев.
|
ВП
|
| Воздухораспределитель ВРП-1,6
|
Кондиционируемые помещения
|
| Воздухораспределитель ВРР-2,5
|
| Воздухораспределитель ВРНС-2,5
|
| Воздухораспределитель ВРРС-2,5
|
2.4 Противопожарная систем
а
Для подачи воды к пожарным рожкам предусмотрена противопожарная водная система, обслуживаемая одним насосом НЦВ 100/100А и двумя насосами НЦВ220/100А.
Производительность всех насосов обеспечивает одновременную работу противопожарной водяной системы, системы пенотушения и системы орошения шлюпок.
Система постоянно находится под давлением, для чего в МО установлена пневмоцистерна.
При падении давления в пневмоцистерне до 0,8 МПа (8 кгс/см2) автоматически включается насос НЦВ 100/100А, при достижении в пневмоцистерне давления 1 МПа (10 кгс/см2) насос автоматически выключается. При работе насоса НЦВ 100/100А и падении давления в трубопроводе до 0,6МПА (10 кгс/см2)автоматически включается один из насосов НЦВ 220/100А.
Для аварийных целей в насосном отделении установлен пожарный дизель – насос ДПНС 220/100 от самостоятельного кингстона; насос НЦВ 220/100А от канала охлаждения главного двигателя; насос НЦВ 100/100А от приемной трубы балластного насоса.
Пожарная система выполнена по кольцевой схеме в районе кормовой надстройки и по линейной схеме в остальной части судна.
Система паротушения обеспечивает защиту:
- дымоходов вспомогательных котлов;
- утилизационного котла;
- глушителей вспомогательных дизель-генераторов;
- глушителя аварийного дизель-генератора;
- искрогасителей дымоходов котлов;
- искрогасителя газовыхлопа главного двигателя.
Коллектор паротушения расположен на верхней палубе в котельном отделении. Подача пара давлением 0,50 – 0,70 МПа (5-7 кгс/см2) на коллектор паротушения производится от утилизационного и нефтяного котлов.
Основным средством тушения пожара в танках ГНО, на верхней палубе в районе танков, в топливных бункерах, расположенных вне машинного отделения, ННО и малярной является система пенотушения.
Расчетное количество пенообразователя хранится в двух резервуарах, установленных в станции пенотушения, расположенной на верхней палубе в районе 71-73 шп ПрБ.
Вода на работу системы пенотушения подается насосами пожарной водяной системы.
Система выполнена со стационарной разводкой трубопроводов по танкам, с применением для подачи пены в танки и на верхнюю палубу в районе танков переносных пеногенераторов ГСП-600 (кратность пены 700-100:1) и стационарных пеноводяных лафетных стволов (кратность пены 10:1). Подача пены в топливные бункеры, ННО и ГНО производится только при помощи переносных пеногенераторов.
Основным средством пожаротушения в машинно-котельном отделении является система объемного химического тушения, состоящая из станции "СОП" и разводящих трубопроводов с распылителями в МКО. Система работает на фреоне 114В2. Станция расположена на палубе 1 яруса в районе 90-94 шп ПрБ. Пуск системы ручной из помещения станции.
Для предупреждения людей, находящихся в МКО, о пуске системы в действие, предусмотрена звуковая и световая сигнализация.
Для тушения пожара в главном двигателе и помещении аварийного дизель-генератора соответственно в машинном отделении и в помещении СОП установлены по одной углекислотной батарее БМ2.000.
Все грузовые и отстойные танки оборудованы системой инертных газов и для предупреждения возможности взрыва и пожара в этих отсеках путем создания и поддержания в них атмосферы с низким содержанием кислорода не свыше 8% по объему.
Для целей инертизации грузовых и отстойных танков использованы охлажденные и очищенные дымовые газы вспомогательных котлов.
Охлаждение газов от температуры на выходе из вспомогательных котлов до температуры не свыше 338К (65°С), а также очистка их осуществляется забортной водой в малогабаритном контактном аппарате пенного типа.
Подача инертных газов в танки производится центробежной газодувкой ТГ-170-1, 1 номинальной производительностью 10300 м3/ч при давлении 23 кПа (2300 кгс / м2). Предусмотрен 100% резерв.
Во всех грузовых и отстойных танках поддерживается избыточное давление не свыше 8 кПа (800 кгс / м2).
Для обеспечения эффективного газо- и воздухообмена каждый танк оборудован продувочной трубой. Предусмотрена возможность вентиляции грузовых и отстойных танков наружным воздухом с использованием для подачи воздуха газодувки инертных газов. Основное оборудование системы инертных газов расположено в самостоятельном помещении, оборудованном эффективной вентиляцией и телефонной связью.
2.5 Осушительно-балластная система
Для осушения МКО предусмотрены два балластно-осушительных самовсасывающих центробежных электронасоса. НЦВС160/30А-П и один осушительный винтовой электронасос 2ВВ-6, 3/16-6, 3/4Б.
Осушительным винтовым насосом, установленным в МКО, также осушается цистерна сбора вод, загрязненных нефтепродуктами.
Для предотвращения загрязнения моря нефтепродуктами откачка льяльных вод за борт производится осушительным винтовым электронасосом, установленным в МКО, через сепаратор трюмных вод СК-10М. В особых районах плавания откачка этих вод производится в цистерну сбора льяльных вод, которая расположена в двойном дне машинного отделения.
Предусмотрена возможность откачки из цистерны льяльных вод МКО за борт через сепаратор трюмных вод СК-10М.
Для автоматического контроля нефтесодержания сливаемых за борт вод предусмотрена система "SOP".
Слив нефтепродуктов из сепаратора льяльных вод производится в цистерну сбора нефтеостатков, расположенную в МКО. Осушение носового насосного отделения производится самостоятельным осушительным винтовым электронасосом 2ВВ-6, 3/16-6, 3/4Б, установленным в ННО, в цистерну сбора льяльных вод ННО, расположенную там же с возможностью перекачки в цистерну льяльных вод МКО.
Запуск осушительных винтовых электронасосов при осушении МКО и ННО, автоматический от датчиков верхнего уровня установленных в кормовом колодце МКО и в колодце ННО, остановка от датчика нижнего уровня и по срыву давления.
Запуск осушительных винтовых электронасосов при осушении других помещений производится вручную.
Осушение грузового насосного отделения и трубопроводов грузовой системы производится электропоршневым насосом ЭНП25/2, установленным в ГНО, в цистерну, расположенную там же в районе 72-73 шп ПрБ.
Осушение цепных ящиков и помещений под палубой бака производится осушительным эжектором ВЭЖ6,3.
Рабочая вода к эжектору подводится от противопожарной водяной системы.
Во всех осушаемых помещениях судна установлены осушительные приемники с трубами присоединяемые через клапаны или клапанные коробки к соответствующим насосам и эжектору.
Для приема и удаления балласта из форпика и ахтерпика предусмотрена балластная, система которая обслуживается двумя самовсасывающими балластно-осушительными электронасосами НЦВС160/30А-П, установленными в МКО (см. осушительная система) и одним самовсасывающим балластным насосом НЦВС250/30А-П, установленным в ННО.
3. АНАЛИЗ ПОДСИСТЕМ СУДНА
3.1 Подсистема пожаротушения
Активная противопожарная защита (АПЗ) танкера представляет собой комплекс мероприятий, с помощью которых можно:
а) быстро обнаружить очаг пожара;
б) успешно ликвидировать пожар.
Эти мероприятия осуществляют с помощью специальных средств АПЗ: систем и устройств пожарной сигнализации; систем тушения пожаров; первичных средств.
В первую группу средств АПЗ входят системы пожарной сигнализации. Системы пожарной сигнализации — это устройства, с помощью которых осуществляется наиболее раннее обнаружение пожаров и оповещение. Системы различаются по принципу обнаружения очага пожара. Системы тушения пожаров (вторая группа средств АПЗ) делятся на четыре вида в зависимости от способа воздействия на очаг пожара. Каждый вид объединяет несколько конкретных систем, различающихся по типу используемой огнетушащей среды.
Устройство систем пожаротушения, их конструкция зависят от используемого принципа тушения. Рассмотрим различные способы прекращения горения, основанные на физическом и химическом принципах.
3.1.1 Водяное пожаротушение
Вода является наиболее доступным и дешевым средством тушения пожаров на судах. Поэтому в настоящее время широко распространены системы водяного пожаротушения, водораспыления, водяного орошения, водяных завес, которые охлаждают горящую поверхность.
Система водяного пожаротушения состоит из следующих основных элементов: 1) пожарных насосов; 2) трубопроводов (приемных и напорных); 3) пожарных кранов (концевых клапанов); 4) приводов управления арматурой и насосами; 5) контрольно-измерительных приборов; 6) пожарных рукавов с быстросмыкающимися соединительными головками и стволами.
Минимальную производительность наименьшего пожарного назначают из условия подачи воды, необходимой для работы двух струй; максимальная производительность насосов на грузовых судах не требуется более 180 м3/ч. По правилам НВ этот предел равен 200 м3/ч, а для судов, строящихся на класс «F» - 300 м3/ч.
Минимальную производительность аварийных пожарных насосов рассчитывают отдельно в зависимости от вместимости судна.
Если пожарные насосы используют для обеспечения забортной водой других систем пожаротушения, то их производительность определяют, исходя из наибольшего расхода воды. Лишь в правилах PC, БО и проекте правил ОТНК исходят из потребности в воде одной из систем пожаротушения и работы двух — шести пожарных стволов. Вследствие этого, а также ограниченного выбора размеров имеющихся насосов фактическая производительность пожарных насосов значительно больше расчетной.
3.1.2 Спринклерная система пожаротушения
В группу систем пожаротушения распыленной водой входят: а) спринклерная, предназначенная для тушения пожаров в жилых и служебных помещениях, с автоматическим управлением б) дренчерная, принцип действия подобен спринклерной, с ручным или автоматическим управлением; в) верхнего и нижнего водораспыления в машинных отделениях для тушения остатков нефтепродуктов, с ручным управлением; г) тушения тонкораспыленной и аэрированной водой, с ручным управлением. В группу защитных систем входят: а) орошения палуб наливных судов с целью снижения испарения грузов при плавании в жаркое время года, с ручным управлением; б) орошения сходов и вахт в машинных и котельных отделениях, используемые главным образом при местных пожарах, с ручным управлением; в) водяной защиты пожарной команды, а также самого судна при тушении пожаров на других судах или береговых объектах, с ручным управлением; г) орошения помещений, предназначенных для хранения легковоспламеняющихся или взрывчатых веществ, с автоматическим управлением; д) орошения переборок, проходов, конструкций при пожаре в смежных помещениях или рядом расположенных районах судна, с автоматическим и ручным управлением; е) водяных завес, препятствующих распространению огня в помещениях больших площадей, проходах, с автоматическим и ручным управлением.
Это разделение систем довольно условно, так как в результате их действия происходит одновременно эффект тушения и защиты. Подробно рассмотрим спринклерные системы, так как в соответствии с различными национальными правилами они должны быть установлены на всех судах, с персоналом более 26 человек. Требования этих правил к спринклерным системам в основном совпадают и сводятся к следующему: системы должны включаться автоматически при повышении температуры в охраняемом помещении до заранее установленной величины; иметь питание как от специального спринклерного насоса, так и от системы водяного пожаротушения; иметь пневмоцистерны с запасом пресной воды и воздушные компрессоры для подкачки пневмоцистерн; иметь сигнальное устройство, извещающее о срабатывании системы и указывающее место вскрывшихся оросительных насадок; иметь не менее двух источников энергии для питания спринклерного насоса, компрессора и сигнального устройства; подразделяться на секции.
Принцип действия спринклерных систем, механизмы и оборудование которых должны располагаться за пределами защищаемых помещений, заключается в том, что при повышении температуры в охраняемом помещении до определенной величины автоматически открываются отверстия в специальных оросительных насадках, называемых спринклерами.
Под действием давления в трубопроводе вода, проходя спринклер, распыляется на капли определенной величины, которые орошают палубу, стены и подволоку помещения.
1 - компрессор; 2 - баллон сжатого воздуха; 3 - сепаратор; 4 - предохранительный клапан; 5 - пневмоцистерна; 6 - подвод воды от системы водяного пожаротушения; 7 и 11 - КПУ, предназначенные для включения водопитателей; 8 - электронасос спринклерной системы; 9 - прием воды от кингстона; 10 - пусковое исполнительное реле насоса; 12 - магистраль спринклерной системы; 13 - групповое КПУ; 14 - групповой распределительный трубопровод; 15 - спринклер.
Рис. 3.1 Принципиальная схема судовой спринклерной системы
Конструктивно спринклерная система состоит из источников питания водой; контрольно-пускового (сигнального) устройства, в нашем случае это датчики температуры, размещенные в помещениях судна; сети трубопроводов; спринклеров, включающих датчики, реагирующие на повышение температуры при пожаре в помещении, и автоматические запорные устройства, которые обеспечивают подачу распыленной струи в очаг пожара (рис. 3.1).
В зависимости от температуры воздуха в защищаемых помещениях спринклерные системы бывают водяные, воздушные и комбинированные.
Водяная спринклерная система имеет постоянно заполненные водой магистральные и распределительные трубопроводы со спринклерами. Этой системой оборудуют помещения, в которых температура воздуха не ниже 4° в течение всего года.
Воздушная спринклерная система имеет трубопроводы, заполненные водой лишь до контрольно-сигнального устройства, выполненного в виде воздушно-водяного клапана. Трубопроводы, расположенные за этим клапаном, наполнены сжатым воздухом. При возникновении пожара воздух выходит наружу через оросители, а система заполняется водой. Этой системой снабжают помещения, в которых температура воздуха в течение года может быть ниже 4°. Комбинированная система имеет одну часть трубопровода, заполненную воздухом, другую — водой.
Водопитатели спринклерной системы состоят обычно из двух комплексов оборудования, предназначенных для подачи пресной воды под давлением в трубопровод системы в период «дежурного состояния» спринклеров. В этот комплекс входят пневмоцистерна и воздушный компрессор с баллонами, поддерживающий рабочее давление в системе и подающий воду к вскрывшимся спринклерам. Воздушный компрессор должен иметь:
· не менее двух источников энергии;
· запас воды в пневмоцистерне обычно принимается не менее 2500 л при рабочем давлении 1,5 кгс/см2;
· подачи морской воды под давлением в трубопровод системы в период «рабочего состояния» спринклеров.
Этот комплекс состоит из электронасоса, оборудованного специальной автоматикой включения и насоса системы водяного пожаротушения, обеспечивающего подачу необходимого количества забортной воды в трубопровод спринклерной системы.
На основании описанных принципов действия спринклерной системы, в рамках данного дипломного проекта:
1. выполним размещение датчиков температуры в помещениях судна на уровне 180 см от пола (16 датчиков температуры), не мене 50 см от дверей, окон и вентиляционных отверстий;
2. установим запорные устройства (исполнительные механизмы) в местах 6, 7, 9 и 11 указанных на рисунке 3.1 (4 запорных устройства);
3. обеспечим непрерывный мониторинг (в реальном времени) состояния датчиков температуры;
4. при несовпадении сигнала с датчика с технологическими параметрами реализуем:
4.1. автоматический и полуавтоматический запуск спринклерной подсистемы;
4.2. выдачу сигналов тревоги и индикацию аварийного участка на мнемосхеме оператора.
3.1.3 Система орошения палубы водой
В летнее время вследствие нагревания палубы и бортов происходит интенсивное испарение транспортируемых нефтепродуктов. Для уменьшения нагрева палубный настил и борта корпуса судов, перевозящих светлые нефтепродукты, окрашивают в светлые тона. Однако этого недостаточно для того, чтобы снизить температуру паров и верхних слоев груза в цистернах до требуемой величины. На наливных судах, перевозящих нефтепродукты с температурой вспышки паров менее 45°, над грузовыми цистернами, насосными отделениями и коффердамами предусматривают системы орошения палубы водой (рис. 3.2).
Водяной душ позволяет несколько охладить палубу и наружные части борта за счет испарения воды и, следовательно, уменьшить пожароопасное испарение. При перевозке тяжелых нефтепродуктов с температурой вспышки более 60-80° системы орошения палубы на судах, как правило, не применяют.
В систему орошения, включаемую вручную, воду подают пожарные насосы, находящиеся в районе носовой части корпуса, либо пожарные насосы, размещенные в машинном отделении. Магистральный трубопровод системы, проложенный под переходным мостиком, имеет ответвления к распылителям. На отдельных участках палубы магистраль системы орошения через ответвления, снабженные запорными устройствами, сообщается с магистралью системы водяного пожаротушения.
Расход воды в системе орошения составляет 0,015-0,017 л/с на 1 м2 площади.

Рис. 3.2 Принципиальная схема системы орошения палубы на наливном судне
До последнего времени для распыления воды применяли преимущественно перфорированные трубы, расположенные над палубным настилом с отверстиями диаметром 3-5 мм и шагом по длине трубы 150-200 мм. Рациональнее заменить эти трубы, затрудняющие перемещение по палубе, насадками с широким факелом распыла воды (рис. 3.2). Дренчеры или другие виды насадок следует размещать так, чтобы вся площадь палубы над грузовыми цистернами, грузовыми насосными отделениями и коффердамами орошалась равномерно. Поверхности орошения двух последовательно расположенных дренчеров должны частично перекрывать друг друга. Имеющиеся в настоящее время насадки при размещении их на высоте 3 м и при напоре воды перед ними, равным 5 м вод. ст., орошают 30-50 м2. Насадки могут создавать как круговой, так и секторный распыл с различной величиной угла факела.
На основании описанных принципов действия системы орошения палубы водой, в рамках данного дипломного проекта:
1. выполним размещение датчиков температуры на палубе судна на уровне 25 см от пола, на крышке каждого танка (8 датчиков температуры);
2. установим запорные устройства (исполнительные механизмы) в местах размещения каждой распыляющей насадки (8 исполнительных механизмов);
3. обеспечим непрерывный мониторинг (в реальном времени) состояния датчиков температуры;
4. при несовпадении сигнала с датчика с технологическими параметрами реализуем:
4.1. автоматический и полуавтоматический запуск оросительной подсистемы;
4.2. выдачу сигналов тревоги и индикацию аварийного участка на мнемосхеме оператора.
3.1.4 Система инертных газов
Инертный газ не только разбавляет атмосферу, но и в какой-то мере охлаждает, а также изолирует горящее вещество от кислорода атмосферного воздуха. Эти свойства инертных газов, зависящие от температуры, давления и плотности, выражены слабо, поэтому их обычно не учитывают при подсчете необходимого количества тушащей среды.
Обозначим буквой к содержание кислорода по объему в атмосфере помещения, при котором прекращается горение вещества. Чтобы достичь этого, необходимо на каждый кубометр объема помещения ввести инертный газ в объеме
 . .
При этом замещение 1% кислорода в воздухе будет сопровождаться замещением 3,75% азота. Следовательно, на каждый кубометр свободного объема помещения необходимо вводить инертный газ, объем которого
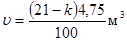 . .
Так, если к=15%, то  = 0,285 м3. Практически, учитывая возможные утечки тушащей среды, для прекращения горения на каждый кубометр свободного объема закрытого помещения вводят 30% инертного газа (по объему). = 0,285 м3. Практически, учитывая возможные утечки тушащей среды, для прекращения горения на каждый кубометр свободного объема закрытого помещения вводят 30% инертного газа (по объему).
При заданном расчетном времени t (мин) подачи тушащей среды с удельным объемом vb (м3/кгс) расход ее на кубометр свободного объема помещения составит
 . .
Величина к зависит от рода горящего вещества, свойств огнетушащей среды, а также от их расходов и скорости подачи.
Вследствие токсичности огнетушащих сред системы необходимо оборудовать сигнализацией предупреждения, чтобы люди могли вовремя покинуть помещение.
Системы парового пожаротушения используют в грузовых трюмах сухогрузных и наливных судов, в угольных бункерах, топливных и масляных цистернах, коффердамах, грузовых насосных отделениях, в фонарных, малярных, кладовых и аналогичных помещениях, а также для тушения отдельных очагов пожара в закрытых помещениях. Огнетушащей средой системы является водяной насыщенный пар под давлением от 5 до 10 кгс/см2, который подают в охраняемое помещение с интенсивностью не менее 1,33 кгс/ч на 1 м3.
Пар для системы паротушения подают от главных или вспомогательных котлов по трубам на станцию паротушения, где установлен специальный распределительный коллектор.
От распределительного коллектора пар по независимым трубопроводам подается в защищаемые помещения. Диаметры труб, подводящих пар в отдельные помещения, принимают по расчету, исходя из условия обеспечения подачи пара с требуемой интенсивностью, но не менее 15мм для помещений небольшого объема и 25мм для грузовых трюмов.
На основании описанных принципов действия системы инертных газов, в рамках данного дипломного проекта:
1. выполним размещение датчиков температуры в каждом танке судна на уровне 15 см от крышки (8 датчиков температуры);
2. обеспечим непрерывный мониторинг (в реальном времени) состояния датчиков температуры;
3. при несовпадении сигнала с датчика с технологическими параметрами реализуем:
3.1. автоматический и полуавтоматический запуск оросительной подсистемы;
3.2. выдачу сигналов тревоги и индикацию аварийного участка на мнемосхеме оператора.
3.1.5 Система пенотушения
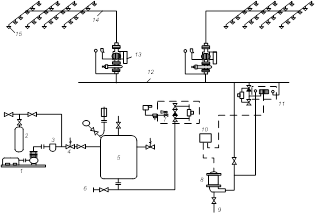
В качестве систем изоляции на судах широкое применение нашли различные системы пенного пожаротушения. Схема общего расположения системы воздушно-механического пенного пожаротушения на наливном судне приведена на рисунке 3.3.
Пена тушит очаг пожара в основном за счет:
1) охлаждения верхнего слоя горящего вещества и зоны пламени жидкой фазой разрушающейся пены. (Это охлаждение обусловлено большой теплоемкостью и теплотой парообразования воды, из которой состоит жидкая фаза. При подаче пены в очаг пожара ее первые порции полностью разрушаются и испаряются, при этом интенсивность испарения обусловлена большой площадью контакта пленок пузырьков с нагретыми газами. В результате создается над очагом пожара «паровая подушка», которая уменьшает парциальное давление кислорода в диффузионной зоне пламени при тушении воздушно-механической пеной. При тушении химической пеной эффект «паровой подушки» усиливается за счет выделения углекислоты. Все это уменьшает интенсивность горения и подготавливает условия, при которых пена, подаваемая в очаг, перестает разрушаться.);
2) изоляции горящего вещества от окружающего воздуха. (При этом слой пены препятствует проходу продуктов испарения горящего вещества в факел пламени. Эффект изоляции достигается только в том случае, если упругость паров горящего вещества недостаточна для преодоления упругого сопротивления слоя пены. Таким образом, эффект изоляции целиком зависит от стойкости пены и от величины ее слоя над поверхностью горящего вещества.);
3) теплоизолирующей способности слоя пены, которая обусловлена малой теплопроводностью газовой фазы, рассредоточенной в пузырьках малого объема.
В зависимости от типа пены судовые системы можно разделить на две группы: тушения химической пеной и тушения воздушно-механической пеной. Все системы пенного пожаротушения можно разделить также по степени кратности пены. Они бывают низкой, средней, высокой кратности. Выбор той или иной системы пенотушения на судах регламентирован Правилами классификационных обществ.
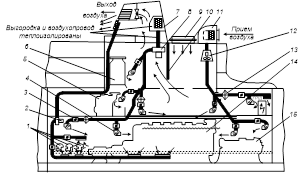
1 – трубопровод системы водяного пожаротушения; 2 - резервуар с пенообразователем; 3 - магистральный трубопровод; 4 - пенопровод; 5 – пеносливные трубы; 6 - мембрана; 7 - стационарный воздушно-пенный ствол; 8 - клапан с дистанционным управлением; 9 - клапан запорный; 10 - носовая станция пенотушения.
Рис. 3.3. Схема общего расположения системы воздушно-механического пенного пожаротушения на наливном судне
Система пенного пожаротушения на предназначена для защиты грузовых цистерн, насосных отделений и носовых топливных танков. Для защиты грузовых цистерн установлено восемь лафетных стволов с таким расчетом, чтобы можно было покрыть пеной любую часть открытой палубы. В насосные отделения и носовые топливные диптанки проведены трубопроводы пены со стационарными воздушно-пенными стволами.
На основании описанных принципов действия системы пенотушения, в рамках данного дипломного проекта:
1. выполним размещение датчиков температуры в МКО судна на уровне 180 см от пола, не менее 150 см от котлов и электродвигателей (8 датчиков температуры);
2. установим запорные устройства (исполнительные механизмы) в местах размещения каждой пеноподводящей насадки (8 исполнительных механизмов);
3. обеспечим непрерывный мониторинг (в реальном времени) состояния датчиков температуры;
4. при несовпадении сигнала с датчика с технологическими параметрами реализуем:
4.1. автоматический и полуавтоматический запуск оросительной подсистемы;
4.2. выдачу сигналов тревоги и индикацию аварийного участка на мнемосхеме оператора.
3.2 Подсистема кондиционирования воздуха
Судовые помещения, в которых возможно выделение вредных для организма газов, специфических запахов и других примесей, оборудуют автономными системами приточно-вытяжной вентиляции. К таким помещениям относятся медицинские, продовольственно-пищевые, продовольственные кладовые, аккумуляторные (раздельно для кислотных и щелочных аккумуляторов), насосные отделения нефтеналивных судов и газовозов, производственные помещения рыбодобывающих и рыбообрабатывающих судов, помещения рефрижераторных машин, мастерские для ремонта топливной аппаратуры, сварочные мастерские и станции углекислотного и жидкостного химического тушения.
Системы вентиляции могут быть искусственными, естественными и комбинированными. Выбор типа вентиляции зависит от назначения помещений, а также от назначения и типа судна и его энергетических возможностей. На судах большого водоизмещения применяют, как правило, искусственную вентиляцию, для судов валовой вместимостью менее 5000 р. т допускается только естественная вентиляция.
При условии исключения возможности распространения вредных газов и запахов из одного помещения в другое допускается объединять в общую вытяжную вентиляционную систему следующие помещения: общественные, санитарно-гигиенические, санитарно-хозяйственные, служебные, кладовые судового снабжения, кладовые хозяйственные и прочие общего назначения.
Приток воздуха в помещения общественные, служебные, санитарно-гигиенические, хозяйственные, кладовые судового снабжения и хозяйственные осуществляется естественным путем из коридоров через решетки или сетки, устанавливаемые в нижней части дверей пли переборок. При наличии на судне системы кондиционирования воздуха приток в служебные и общественные помещения может осуществляться от этой системы.
В общую приточную вентиляционную систему допускается объединять следующие помещения: жилые, общественные и служебные.
Удаление воздуха из общественных помещений с числом мест более 12 производится искусственным путем через решетки или сетки, установленные на вытяжном трубопроводе, в остальных случаях естественным путем в коридоры через решетки или сетки, установленные в нижней части дверей или переборок. Не допускается удаление воздуха в коридоры и тамбуры из помещений, в которых имеются источники неприятных запахов, вредных примесей и газов.
Если помещения оборудуют естественной вентиляцией, то ее выполняют самостоятельной для каждого помещения. Каналы естественной вентиляции прокладывают в виде вертикальных стояков без погибов. Допускается не более одного погиба под углом до 30°, с радиусом погиба не менее 1,5 диаметра условного прохода трубы. Для каждого помещения устанавливают как минимум два канала, заканчивающихся снаружи головками с вытяжными устройствами, а внутри помещений - вентиляционными сетками. Каналы располагают на возможно большем удалении один от другого для эффективного вентилирования всего объема помещения. Если помещения расположены на открытых палубах или примыкают к коридорам и тамбурам, имеющим открытые проемы на палубы, то один из каналов рекомендуется заменять вентиляционной крышкой. Крышку следует устанавливать в нижней зоне помещения (если это допустимо с точки зрения непотопляемости отсеков), в противоположной от канала стороне помещения.
Тип вентиляции и воздухоподача. Различные судовые помещения в зависимости от времени пребывания в них людей, количества тепла, вредных газов и специфических запахов, которые могут выделять установленные в них механизмы и системы, оборудуют тем или иным типом вентиляции.
После выполнения расчетов по определению необходимых количеств приточного и вытяжного воздуха проверяют баланс между притоком и вытяжкой. С этой целью суммируют количества воздуха, поступающие в коридоры и удаляемые из коридоров. Если при этом обнаруживается дебаланс, то коридоры оборудуют естественной вентиляцией.
Устройства для приема и выброса воздуха. От правильного размещения этих устройств во многом зависит эффективность работы систем вентиляции.
Машинно-котельная вентиляция предназначается для создания и поддержания заданных условий воздушной среды в машинных помещениях (разности температур, подвижности и газового состава воздуха), а также для обеспечения работы механизмов, потребляющих воздух из объема МКО.
Системами вентиляции оборудуют следующие помещения: машинные отделения с дизельными, паротурбинными и газотурбинными установками; главные и вспомогательные котельные отделения, центральные посты управления энергетическими установками, шумоизолирующие выгородки дизелей, помещения гребных электродвигателей, коридоры валопроводов, вспомогательные помещения в объеме энергетических установок (мастерские, помещения ремонта топливной аппаратуры, помещения сепараторов, механические и электротехнические кладовые и т. п.).
В состав системы вентиляции входят: электровентиляторы (осевые и центробежные), воздухоприемные и воздухораспределительные устройства, запорно-переключающая арматура, глушители шума, теплообменные аппараты и трубопроводы. Проектирование этих систем производят с учетом специфических особенностей судна, его энергетической установки и заданного района плавания.
На судах с энергетической установкой мощностью свыше 300 э. л. с. в помещениях главных и вспомогательных двигателей и котлов устанавливают искусственную приточную вентиляцию (на судах меньшей мощности допускается естественная приточная вентиляция). Вытяжка воздуха из машинных помещений, как правило, осуществляется естественным путем. Искусственной вытяжной вентиляцией оборудуют помещения энергетической установки, имеющие вредные и пожароопасные газовыделения (помещения ремонта топливной аппаратуры, масляных и топливных сепараторов). Она может быть также в виде местных отсосов от оборудования механических мастерских, сварочных участков и из-под настилов машинных отделений.
При проектировании машинно-котельной вентиляции соблюдают требования Регистра России, Санитарных правил для морских судов и других нормативных документов. Основные из них приводятся ниже.
Приемные устройства располагают, как правило, перед световым люком или дымовой трубой. Их конструкция должна исключать попадание воды при мытье палуб и атмосферных осадков в систему, обеспечивать расчетную производительность по воздуху и быструю герметизацию машинного отделения (например, в случае пожара). На специальных судах, перевозящих сыпучие грузы навалом (бокситы, уголь, руды и т. п.), приемные устройства оборудуют эффективными средствами очистки приточного воздуха в виде промывных фильтров или циклонных аппаратов, работающих в период грузовых операций.
В зависимости от вида груза и средних размеров зерен пыли промывные фильтры рекомендуется проектировать на следующие степени сепарирования (к. п. д. фильтра):
Угольная пыль (б = 30 мкм) 98%
Бокситы (б = 85 мкм) 99%
Железорудная пыль (б = 220 мкм) 99,7%
Технические характеристики промывных фильтров обычно не превышают следующих величин:
Расход воды на 1 м3 фильтруемого воздуха0,1 л
Давление воды у оросителя1,4-3,0 кгс/см2
Скорость потока воздуха в оросительной камере3,5 м/с
Приточный воздух подается в рабочую зону машинно-котельных отделений на основные, вспомогательные и ремонтные площадки. За рабочую зону принимается пространство высотой около 2,2 м над настилом или площадками, где расположены места постоянного пребывания вахтенных. Остальные площадки считаются вспомогательными.
Чтобы избежать образования застойных зон в машинно-котельных отделениях, для подачи воздуха рекомендуются следующие обязательные места:
- на дизельных судах - площадки вдоль главного двигателя, в районе вспомогательных и стояночных дизель-генераторов, перед главными распределительными щитами и за ними, площадки на уровне цилиндров главных двигателей, у гребных электродвигателей, вдоль фронта вспомогательных котлов;
- на паротурбинных, газотурбинных судах и судах с СПГГ - площадки у ГТЗА и открытых пультов управления, в районе вспомогательных и стояночных дизель-генераторов, вдоль СПГГ, перед главными распределительными щитами и за ними, вдоль фронта вспомогательных котлов.
Рекомендуемый вид вентиляции вспомогательных помещений МКО приводится в таблице 3.2.
Приточный воздух на эти площадки поступает через поворотные и неповоротные вертикальные и горизонтальные воздухораспределители, позволяющие изменять количество, скорость и направление воздуха (рис. 3.4.).
В механические мастерские, помещения преобразователей, в выгородки распределительных щитов и другие помещения, в которых возможно длительное пребывание машинной команды, воздух подается через поворотные распределители типа «пункалувр». Кладовые различного назначения оборудуют приточными или вытяжными воздухопроводами с концевыми сетками.
Воздух, подаваемый к площадкам обслуживания механизмов и во вспомогательные помещения МКО, где необходимо систематическое присутствие вахтенных и обслуживающего персонала, в зимний период подогревается до температуры не ниже 18° С. Известны схемы вентиляции с подачей к указанным местам в летний период охлажденного воздуха.
Таблица 3.2. Рекомендуемый вид вентиляции вспомогательных помещений МКО
| Помещения
|
Приток, количество обменов в час
|
Вытяжка, количество обменов в час
|
| Механические мастерские, помещения преобразователей, выгородки главных распределительных щитов
|
Искусственный, по расчету на ассимиляцию избыточных тепловыделений
|
Естественная, по балансу с притоком
|
| Ремонта топливной аппаратуры
|
Естественный, по балансу с вытяжной вентиляцией
|
Искусственная, 35 обменов в час
|
| Сепараторов масла и топлива
|
То же
|
Искусственная, 30 обменов в час
|
| Механические кладовые
|
Искусственный, 15 обменов в час
|
Естественная, по балансу с притоком
|
| Электротехнические кладовые
|
То же
|
То же
|
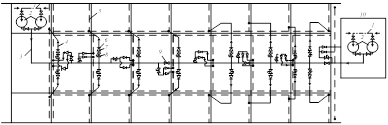
Временные площадки машинно-котельных отделений, приспосабливаемые для выполнения ремонтно-профилактических работ силами машинной команды оборудуют устройствами для подачи душирующего воздуха от системы машинной вентиляции, на которой предусматриваются специальные (обычно заглушенные) отростки. В зимний период душирующий воздух подогревается до температуры не ниже 18° С.
1 - сепараторы топлива н масла; 2 - электровеятилятор центробежный; 3 - заслонка дроссельная; 4 - воздухораспределитель поворотный; 5 - вспомогательный котел; в - утилизационный котел; 7, 11 - воздухоприемное устройство; 8 - электровеятилятор центробежный вертикальный; 9-световой люк; 10 - ширма; 12 - электровентилятор осевой; 13 - подогреватель воздуха; 14- главный двигатель; 15 - вспомогательный дизель-генератор.
Рис. 3.4. Принципиальная схема искусственной приточной и естественной вытяжной вентиляции МКО судна с дизельной установкой
Вытяжка воздуха осуществляется естественным путем из верхней зоны машинно-котельного отделения, как правило, через кожух дымовой трубы. Если удалить воздух из машинно-котельных отделений естественным путем невозможно, допускается установка в шахте вытяжных электровентиляторов.
Удаление воздуха из машинно-котельного отделения через световой люк не допускается.
На судах с паротурбинными, газотурбинными установками и с СПГГ рекомендуется применение для выброса отработавших газов эжектирующих устройств в совокупности с организованной вытяжкой воздуха из помещений МКО через кожух дымовой трубы. Эжектирующее устройство в этом случае является наиболее эффективным средством выброса газов от энергетического оборудования, исключающим задымление палуб.
Системы вентиляции являются разветвленными судовыми системами, состоящими из разнообразного, в том числе и крупногабаритного, оборудования. Их проектирование тесно связано с планировкой общего расположения судовых помещений, а в ряде случаев влияет на архитектуру судна в целом. Используемые в этих системах электродвигатели для привода вентиляторов и насосов, а также теплообменные аппараты, потребляющие различного рода тепло- и хладоноситель, оказывают существенное влияние на общую энерговооруженность судна. Проектирование систем вентиляции является трудоемким процессом, требующим специальных навыков и достаточно высокой квалификации исполнителей.
На основании описанных принципов действия системы кондиционирования, в рамках данного дипломного проекта:
1. выполним размещение датчиков температуры в помещениях судна на уровне 180 см от пола (13 датчиков температуры);
2. установим запорные устройства (исполнительные механизмы) в узловых местах воздухопровода (4 исполнительных механизма);
3. обеспечим непрерывный мониторинг (в реальном времени) состояния датчиков температуры;
4. при несовпадении сигнала с датчика с технологическими параметрами реализуем:
4.1. автоматический и полуавтоматический запуск оросительной подсистемы;
4.2. выдачу сигналов тревоги и индикацию аварийного участка на мнемосхеме оператора.
3.3 Осушительно-балластная подсистема
На рисунке 3.5. показана схема систем охлаждения главной машины и перекачки воды внутри судна. Насос 1, предназначенный для охлаждения главной машины 5, расположен ниже уровня жидкости, подлежащей перемещению, поэтому через приемную сетку 3 по всасывающему (приемному) трубопроводу 2 вода поступает к насосу, откуда по нагнетательному трубопроводу 4 — в рубашки цилиндров и далее по отливному трубопроводу вытекает за борт. В приемное отверстие насоса вода поступает под давлением атмосферного воздуха на свободную поверхность воды на уровне грузовой ватерлинии и столба воды, равного глубине погружения приемного отверстия. Насос должен только сообщить воде энергию, достаточную для того, чтобы она могла подняться от уровня всасывания до уровня нагнетания и преодолеть гидравлические сопротивления, встречаемые в нагнетательном и отливном трубопроводах, местные сопротивления, а также атмосферное давление на уровне отливного отверстия.
Рис. 3.5. Схема систем охлаждения главной машины и перекачки воды внутри судна.
Насос 8, предназначенный для перекачки воды внутри судна, расположен выше уровня жидкости, подлежащей перемещению. Вода через приемную сетку 6, невозвратно-запорный клапан, приемный трубопровод, невозвратно-запорную клапанную коробку 7, насос 8 и трубопровод 9 поступает в расходный бак 10. Насос должен создать пониженное давление во всасывающем трубопроводе, чтобы перекачиваемая жидкость дошла до уровня всасывания насоса. ВВ, и сообщить жидкости энергию для подъема до уровня ГГ и преодоления гидравлических сопротивлений во всасывающем и отливном трубопроводах, а также давления воды в расходном баке. Насос в этом случае работает с подпором.
Кроме того, для тушения пожаров на судах по способу изоляции используют системы затопления, которые предназначены для заполнения забортной водой помещений, в которых хранят или перевозят взрывчатые и легковоспламеняющиеся вещества, а также некоторые жидкости, плотность которых выше, чем у воды (сероуглерод, дибутилфталат и др.). По мере заполнения помещения водой над горящими веществами создается слой, который надежно изолирует их от кислорода воздуха и охлаждает поверхность.
Осуществить это нужно за короткий промежуток времени, поэтому производительность насосов системы затопления должна быть высокой, а диаметр трубопроводов — большим. Для затопления помещений могут использоваться специальные кингстоны либо пожарные рукава от систем водяного пожаротушения.
На основании описанных принципов действия осушительно-балластной подсистемы, в рамках данного дипломного проекта:
1. выполним напольное размещение датчиков влажности в МКО (10 датчиков влажности);
2. установим запорные устройства (исполнительные механизмы) в узловых местах главного насоса (2 исполнительных механизма);
3. обеспечим непрерывный мониторинг (в реальном времени) состояния датчиков влажности;
4. при несовпадении сигнала с датчика с технологическими параметрами реализуем:
4.1. автоматический и полуавтоматический запуск оросительной подсистемы;
4.2. выдачу сигналов тревоги и индикацию аварийного участка на мнемосхеме оператора.
4. АЛГОРИТМИЧЕСКАЯ СТРУКТУРА КОНТРОЛЯ И УПРАВЛЕНИЯ
4.1 Алгоритм первичной обработки сигналов с датчиков и выработки экстренных сообщений
Под алгоритмической структурой контроля и управления будем понимать совокупность алгоритмов по отдельным режимам работы технологического процесса с указанием условий перехода с одного режима работы на другой.
При измерении технологических параметров подсистем танкера информация от датчиков поступает в аппаратуру ввода/вывода в виде унифицированных сигналов (0-10В, 4-20 мА и т.д.), сигналов от термопар, термометров сопротивления, то есть реальной физической величине соответствует напряжение, сила тока, индуктивность или частота импульсов. В устройствах связи с объектом (УСО) эти сигналы преобразуются в двоичные коды длиной от 8 до 16 разрядов. Чтобы провести анализ получаемой информации, необходимо преобразовать коды АЦП в масштаб реальных физических величин: мм, т/час, оС и т. д. К тому же датчики могут иметь статические ошибки, нелинейные характеристики или зашумленный выходной сигнал.
Для получения корректных значений результатов мониторинга из двоичных кодов УСО применим алгоритмы первичной обработки такие, как проверка на достоверность, сглаживание, проверка на технологические границы. Программную реализацию алгоритмов контроля и управления выполним в математическом пакете "MatLab 7.0.1" с целью проверки их работоспособности.
Для адекватного функционирования синтезируемой системы управления необходимо разработать алгоритмы первичной обработки информации, поступающей от датчиков. Эти алгоритмы должны обеспечивать выработку экстренных сообщений оператору в случае, когда нарушается нормальный режим работы, и возникает предаварийная ситуация.
Сигналы с датчиков поступают по физическим линиям на АЦП. На эти сигналы накладываются всевозможные помехи (импульсные помехи; радиопомехи промышленных частот; помехи, обусловленные погрешностью датчиков). Сигнал с АЦП обрабатывается в ЭВМ и для того, чтобы исключить влияние помех, разрабатываются алгоритмы контроля. К ним относятся алгоритмы проверки на достоверность, фильтрации и проверки на технологические границы.
Для ввода аналогового сигнала необходимо осуществить инициализацию АЦП и установить коэффициент усиления усилителя по соответствующему каналу ввода.
Приведем блок-схему алгоритма ввода сигналов с датчиков на рисунке 4.1.
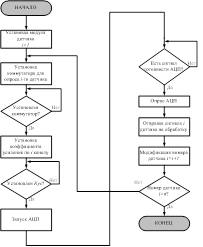
Рис. 4.1 Блок-схема алгоритма ввода сигналов с датчиков
Сигналы, поступающие с датчиков, подвергаются первичной обработке, алгоритмы которой опишем далее.
4.2 Алгоритм проверки на достоверность
Алгоритм проверки на достоверность служит для определения наличия импульсной помехи и ее устранения, для обнаружения короткого замыкания или обрыва в канале связи.
При проверке осуществляется циклический опрос всех датчиков. Интервал проверки на достоверность определяется как К-Топр, где Топр - время опроса датчика, а коэффициент К оценивается, исходя из динамических характеристик в каждом канале (можно выбрать максимальное для всех каналов значение). Первые К-значений принимаются достоверными. Проверка выполняется по условию:
 (4.1) (4.1)
где i - номер датчика; j - номер отсчета (j=K+1, K+2...).
Если условие (4.1) нарушается, то вводится признак нарушения и счетчик количества нарушений. Вместо Хij записывается последнее достоверное значение. Затем проверяется следующий соседний отсчет на условие (4.1). Если в очередной раз условие нарушается, то счетчик нарушений инкрементируется, и опять же записывается последнее достоверное значение. Если число нарушений достигло 3-х, то принимается решение о наличии устойчивой помехи. Тогда анализируется знак разности (4.1) и определяется вид помехи: если «+» - короткое замыкание, если «-» - обрыв. При этом в памяти ЭВМ фиксируется время нарушения и номер канала, в котором оно обнаружено.
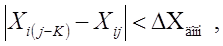
В соответствии с вышесказанным блок-схема алгоритма проверки на достоверность выглядит следующим образом.
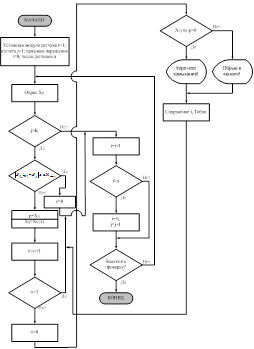
Рис. 4.2 Блок-схема алгоритма проверки на достоверность
Моделирование работы алгоритма произведено в среде "MatLab 7.0.1", листинг которой приведен в приложении 1. Сигналы с датчиков были имитированы при наличии случайных сбоев, обрывов и коротких замыканий канала (рис. 4.3).

а – сигнал на выходе датчика; б – сигнал в канале измерений; в – сигнал проверенный на достоверность. Рис. 4.3 Результаты моделирования работы алгоритма проверки на достоверность
На рисунке 4.3,а показан сигнал с датчика температуры воздуха машинно-котельного отделения танкера; на рисунке 4.3,б отражена имитация обрыва и короткого замыкания в канале связи сигнала с датчика температуры воздуха; на рисунке 4.3,в - вид сигнала после выполнения алгоритма проверки на достоверность. В результате моделирования работы алгоритма проверки на достоверность были выявлены все импульсные помехи и получен "чистый" сигнал для дальнейшей обработки.
4.3 Алгоритмы фильтрации
При работе технологических объектов создаются помехи. Для устранения высокочастотных помех используются аппаратные RC-фильтры. Но они не способны ослабить помехи с частотами, близкими к частотам полезных сигналов. Простейшим примером такой помехи является погрешность измерения параметров технологического процесса. Для ослабления такого рода помех обычно используются алгоритмы скользящего среднего или экспоненциального сглаживания.
Методы скользящего среднего и экспоненциального сглаживания используются для прогнозирования временных рядов. Формально временной ряд – это множество пар данных (X,Y), в которых X – это моменты или периоды времени (независимая переменная), а Y – параметр (зависимая переменная), характеризующий величину исследуемого явления. Цель исследования временных рядов состоит в выявлении тенденции изменения фактических значений параметра Y во времени и прогнозировании будущих значений Y. Модель, построенную по ретроспективным данным можно использовать при наличии устоявшейся тенденции в динамике значений прогнозируемого параметра.
Суть методов скользящего среднего и экспоненциального сглаживания состоит в том, фактические уровни исследуемого временного ряда заменяются их средними значениями, погашающими случайные колебания. Это позволяет более четко выделить основную тенденцию изменения исследуемого параметра. Эти относительно простые методы прогнозирования временных рядов, основанные на представлении прогноза  в виде суммы m предыдущих наблюдаемых значений в виде суммы m предыдущих наблюдаемых значений  ( ( ), причем каждое из них учитывается с определенным весовым коэффициентом ), причем каждое из них учитывается с определенным весовым коэффициентом  . .
 . .
Использование методов скользящего среднего и экспоненциального сглаживания основано на следующих допущениях:
- временной ряд является устойчивым в том смысле, что его элементы являются реализациями следующего случайного процесса:
 , ,
где b – неизвестный постоянный параметр,  – случайная ошибка. – случайная ошибка.
- случайная ошибка имеет нулевое математическое ожидание и постоянную дисперсию; данные для различных периодов времени не коррелированны.
Метод скользящего среднего.
Расчетная формула по методу скользящего среднего имеет вид:
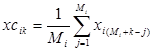 , (4.2) , (4.2)
где Mi – параметр сглаживания, величина которого определяет количество отсчетов  , взятых для вычисления одного сглаженного значения , взятых для вычисления одного сглаженного значения  . .
Раскроем формулу (4.2) для частных значений k, а именно:
 ,(4.3) ,(4.3)
 , (4.4) , (4.4)
 . (4.5) . (4.5)
Принцип скользящего окна поясняется формулами (4.3) – (4.5), из которых следует, что для вычисления очередного сглаженного значения записанная в Мi ячейках памяти информация сдвигается влево, и в освободившуюся ячейку заносится новый отсчет датчика. После чего выполняются процедуры суммирования Мi отсчетов и умножения на коэффициент  . Из анализа алгоритма (4.2) следует, что для его реализации потребуется Mi+2 ячейки памяти, а время готовности алгоритма выдать с заданной точностью 1-е сглаженное значение составит . Из анализа алгоритма (4.2) следует, что для его реализации потребуется Mi+2 ячейки памяти, а время готовности алгоритма выдать с заданной точностью 1-е сглаженное значение составит
 .(4.6) .(4.6)
Величина параметра сглаживания  вычисляется по заданному значению коэффициента ослабления помех вычисляется по заданному значению коэффициента ослабления помех  , который, в свою очередь, представляет собой отношение: , который, в свою очередь, представляет собой отношение:
 ,(4.7) ,(4.7)
где - среднеквадратическое значение помех в отсчетах датчиков xik, - среднеквадратическое значение помех в отсчетах датчиков xik,
 - среднеквадратическое значение помех в сглаженных, вычисленных в соответствии с алгоритмом (4.2) значений xcik. - среднеквадратическое значение помех в сглаженных, вычисленных в соответствии с алгоритмом (4.2) значений xcik.
Чтобы оценить величину Mi, представим каждую из переменных, входящих в выражения (4.2), (4.3) – (4.5) как:
 (4.8) (4.8)
Подставляя (4.8) в (4.2) или (4.3) – (4.5) и вычитая математическое ожидание  , получим уравнения относительно абсолютных значений погрешностей, которые будут идентичны выражениям (4.2) или (4.3) – (4.5), например, , получим уравнения относительно абсолютных значений погрешностей, которые будут идентичны выражениям (4.2) или (4.3) – (4.5), например,
 . .
Предполагая, что значения погрешностей в соседних точках не коррелированны и характеризуются дисперсией  можно записать следующее уравнение относительно дисперсии погрешности сглаживания: можно записать следующее уравнение относительно дисперсии погрешности сглаживания:
или
Следовательно, с учетом выражения (4.7) значение параметра сглаживания для i–го датчика равно:
 .(4.9) .(4.9)
Алгоритм скользящего среднего представлен на рисунке 4.4.
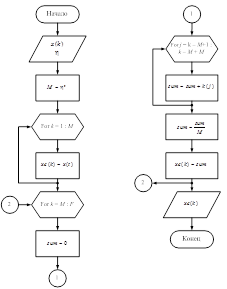
Рис. 4.4 Алгоритм скользящего среднего
Результаты моделирования работы алгоритма представлены на рисунке 4.5.
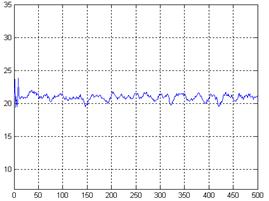
Рис. 4.5. Результаты моделирования работы алгоритма скользящего среднего
На рисунке 4.5 изображен сигнал полученный с помощью алгоритма скользящего среднего. Сравнив его с сигналом, полученным после выполнения алгоритма проверки на достоверность (рис. 4.3,в) видим, что сигнал стал более сглаженным. Первые десять отсчетов датчика (выделены пунктирным прямоугольником на рис. 4.5) не сглажены, так как они непосредственно формируют скользящее окно и сгладить их не возможно, в силу отсутствии предварительной информации.
Метод экспоненциального сглаживания.
Расчетная формула по методу экспоненциального сглаживания имеет вид:
 , (4.10) , (4.10)
при начальном значении и диапазоне изменения параметра сглаживания: 0<ai<1. и диапазоне изменения параметра сглаживания: 0<ai<1.
Следует отметить, что в реальных условиях в результате вывода технологического процесса или технического объекта в установившийся режим работы становится известным желаемое значение контролируемой или регулируемой переменной, которое ранее было обозначено как  . Именно эта величина и может быть использована в качестве начального значения . Именно эта величина и может быть использована в качестве начального значения  . .
Величина параметра a определяет длительность переходных процессов и качество сглаживания. Чем меньше a, тем лучше сглаживание, но тем большее время потребуется для получения сглаженного значения  с заданным ослаблением помехи с заданным ослаблением помехи  . .
Поэтому, как и в предыдущем алгоритме сглаживания, возникает задача нахождения значения параметра сглаживания  и времени готовности по расчетной формуле (4.10) вычислить 1-е сглаженное значение и времени готовности по расчетной формуле (4.10) вычислить 1-е сглаженное значение  с принятым коэффициентом ослабления помех с принятым коэффициентом ослабления помех  . .
Для определения параметра сглаживания перейдем в выражении (4.10) к дисперсиям погрешностей измерений, принимая те же допущения, что и для алгоритма (4.2), тогда
 . .
Откуда
 ,(4.11) ,(4.11)
или
 (4.12) (4.12)
Выражение (4.12) позволяет рассчитать параметр для алгоритма экспоненциального сглаживания, если задан коэффициент ослабления помех  . .
Расчетную формулу (4.10) можно представить не в рекуррентной форме, а в виде суммы следующего вида:
 . .
Считая, что погрешности измерения в каждом отсчете i–го датчика не коррелированны, приходим к аналогичному уравнению относительно дисперсий этих погрешностей:

Выражение в квадратных скобках можно записать как сумму убывающей геометрической прогрессии  со знаменателем со знаменателем 
Следовательно,
 .(4.13) .(4.13)
На основании формул (10) и (12) получаем:
 (4.14) (4.14)
В выражении (4.14) член  с ростом k стремится к нулю, приближаясь к (4.11). Задаваясь степенью приближения δ, можно вычислить значение k, которое будет определять количество рекуррентных вычислений в расчетной формуле (4.10), и, следовательно, время получения первого сглаженного значения при заданном коэффициенте ослабления (4.7). с ростом k стремится к нулю, приближаясь к (4.11). Задаваясь степенью приближения δ, можно вычислить значение k, которое будет определять количество рекуррентных вычислений в расчетной формуле (4.10), и, следовательно, время получения первого сглаженного значения при заданном коэффициенте ослабления (4.7).
На основании сказанного из равенства  находим находим
 ,(4.15) ,(4.15)
Алгоритм экспоненциального сглаживания представлен на рисунке 4.6.
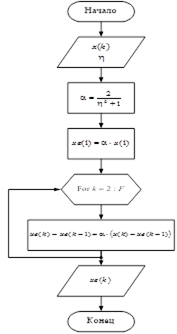
Рис. 4.6 Алгоритм экспоненциального сглаживания
Результаты моделирования работы алгоритма представлены на рисунке 4.7.
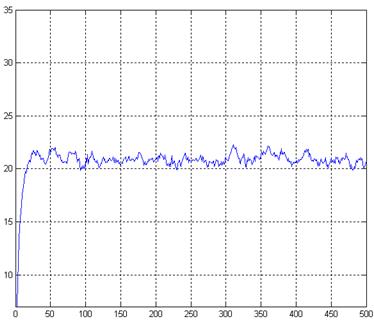
Рис. 4.7 Результаты моделирования работы алгоритма экспоненциального сглаживания
На рисунке 4.7 изображен сигнал, полученный с помощью алгоритма экспоненциального сглаживания. Сравнив его с сигналом, полученным после выполнения алгоритма проверки на достоверность (рис. 4.3,в) видим, что сигнал стал более сглаженным. Для получения первого сглаженного значения необходимо время (выделено пунктирным прямоугольником на рис. 4.7), которое может быть рассчитано по формуле
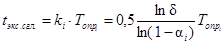 . (4.16) . (4.16)
Как следует из (4.16), это время будет возрастать с увеличением точности вычислений δ. Достоинством метода экспоненциального сглаживания, по сравнению со скользящим окном, является малый объем памяти, хотя он значительно дольше входит в установившийся режим. Следовательно, с учетом необходимости контроля состояния большого количества датчиков (более 30), выбираем алгоритм скользящего среднего, позволяющий быстрее выйти в установившийся режим.
4.4 Алгоритм проверки на технологические границы
Каждая измеряемая величина технологического процесса изменяется в заданных пределах. Если параметр выходит за желаемый диапазон, возникает опасность нарушения процесса работы системы. Поэтому оператор должен вовремя принять меры по устранению нарушений. Для этого разрабатывается алгоритм проверки на технологические границы.
Предположим, измеряемый параметр должен изменяться в диапазоне
Dx = Хнк - Хвк, тогда если текущее Xik (i - номер отсчета, k - канал измерения) лежит в пределах Хнк - Хвк и выполняется условие:

где  - полоса гистерезиса, равная 5% от диапазона изменения параметра; - полоса гистерезиса, равная 5% от диапазона изменения параметра;  - значение признака нарушения границы для предыдущего отсчета. - значение признака нарушения границы для предыдущего отсчета.
В этом случае диспетчер не получает сообщений, и текущее значение признака нарушения границы  = 0. Если Xik > Xвi (4.18) или Xik < Xвi (4.19), то оператору подается сигнал тревоги, = 0. Если Xik > Xвi (4.18) или Xik < Xвi (4.19), то оператору подается сигнал тревоги,  = 1. Причем, если выполняется условие (4.18), то нарушена верхняя граница диапазона, если (4.19), то - нижняя. = 1. Причем, если выполняется условие (4.18), то нарушена верхняя граница диапазона, если (4.19), то - нижняя.
При выходе сигнала за заданные границы в памяти фиксируется время нарушения, канал, в котором оно произошло, а также какая граница была нарушена. Блок-схема алгоритма проверки на технологические границы представлена на рисунке 4.8.
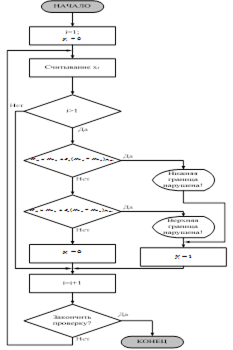
Рис. 4.8 Блок-схема алгоритма проверки на технологические границы
Результаты моделирования работы программы в среде "MatLab 7.0.1" показаны на рисунке 4.9.
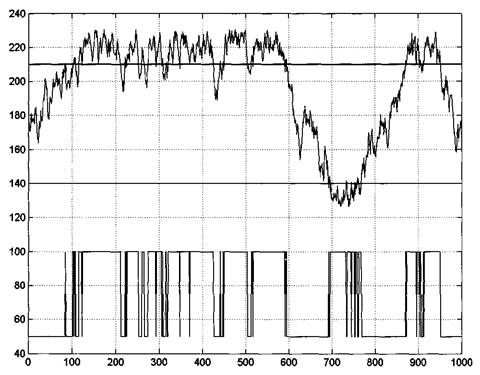
Рис. 4.9. Результаты моделирования алгоритма проверки на технологические границы
На первом графике (рис. 4.9) показана имитация сигнала датчика давления воздуха в трубопроводе машинно-котельного отделения, а на втором - изменение состояние признака перехода  . Листинг программы для моделирования алгоритмов контроля и управления приведен в приложении 1. . Листинг программы для моделирования алгоритмов контроля и управления приведен в приложении 1.
5. ТЕХНИЧЕСКАЯ СТРУКТУРА СИСТЕМЫ
Для проектирования системы управления необходимо разработать ее элементную базу. К техническим средствам предъявляются требования по быстродействию, точности, надежности, стоимости и др. Реализацию этих требований начнем с выбора датчиков.
5.1 Выбор датчиков
По исходным данным о диапазонах изменения и предъявляемым требованиям по точности измерения и регулирования были выбраны соответствующие датчики температуры, давления и расхода жидкости.
Датчик температуры "T7/MPX".
Многоточечный измеритель температуры и уровня раздела фаз разработан для использования как составная часть системы коммерческого учета нефтепродуктов: TSS/Oil для измерений вертикального температурного профиля и уровня подтоварной воды в резервуарах-хранилищах. Т7/МРХ представляет собой Smart измеритель температуры с HART® выходом, интегрированный с мультиплексором и температурным зондом с 15-ю термометрами сопротивлений Pt-100.
Точность измерения температуры составляет 0,1° С при применении термосопротивлений класса t/TO DIN. Точность измерения уровня раздела фаз вода-нефтепродукты составляет 1 см. Для подключения к компьютеру дополнительно может поставляться RS232/HART® преобразователь интерфейса. Различные конструктивные оформления зонда позволяют использовать его при избыточных давлениях 2, 25 или 64 кГ/см2.
Точность измерения температуры в системах коммерческого учета весьма важна, так как ошибка в 1°С приводит к ошибке в определении массы нефтепродукта в резервуаре в 0.1%. Внешний вид датчика температуры серии "Т7/МРХ" изображен на рисунке 5.1.

Рис. 5.1 Внешний вид и конструкция датчика "Т7/МРХ"
Технические характеристики датчиков серии "Т7/МРХ" приведены в таблице 5.1.
Таблица 5.1 Технические характеристики датчиков серии "Т7/МРХ"
| Наименование характеристики
|
Величина характеристики
|
| Тип датчика температуры
|
2-х проводной термометр сопротивления Pt-100
|
| Точность, °С
|
0.1
|
| Максимальная длина измерительного зонда, м
|
30
|
| Напряжение питания, В
|
12...30
|
| Максимальное сопротивление нагрузки, Ом
|
100
|
| Сопротивление изоляции, ГОм
|
1,5
|
| Тип выхода
|
Токовый, 2-проводная линия 4/20мА
|
| Диапазон измеряемых температур, °С
|
-50…+200
|
| Рабочий диапазон температур, °С
|
-40...+85
|
| Максимальное избыточное давление, кг/см2
|
64кг/см2
|
Датчик давления "27
SP
".
Датчик давления серии 27 используется во всех отраслях промышленности для измерения давления жидкости, газа и пара. Датчик давления серии 27 типа Р использует пьезорезистивный сенсор; это активный резистивный мост Уинстона, нанесенный на кристаллический силиконовый чип. Датчик давления серии 27 типа S использует пленочный сенсор, основанный на принципе измерения усилий с подложкой и диафрагмой из керамического материала. Серия 27 имеет малые размеры и фиксированные диапазоны измерения. Внешний вид датчика давления серии "27SP" изображен на рисунке 5.2.

Рис. 5.2. Внешний вид и конструкция датчика "27SP"
Технические характеристики датчиков серии "27SP" приведены в таблице 5.2.
Таблица 5.2 Технические характеристики датчиков серии "27SP"
| Наименование характеристики
|
Величина характеристики
|
| Выходной сигнал, мА
|
4..20мА
|
| Линейность, %
|
0,2
|
| Гистерезис и повторяемость, %
|
0,1
|
| Калибровочная точность, %
|
0,25
|
| Температурный дрейф нуля, %
|
0.25
|
| Температурный дрейф диапазона, %
|
0,07
|
| Питание, В
|
12. ...30
|
| Сопротивление нагрузки, Ом
|
600
|
| Долговременная стабильность, %
|
0,2
|
| Уход нуля, %
|
0,3
|
| Относительная влажность, %
|
98
|
| Температура:
рабочая, °С
предельная, °С
|
-40...+80
-55...+125
|
| Температура хранения, °С
|
-40... +90
|
| Время реакции при 63% входном сигнале, мсек
|
5
|
Датчик расхода "ДРК-1".
Датчики применяются для измерения расхода и объема жидкостей, в том числе загрязненных, неоднородных, агрессивных, взрывоопасных. Пределы измерений в зависимости от модификации от 1 до 20000 м3/ч. Погрешность, % 1,5; 2,5. Габаритные размеры 50х80мм. Выходной сигнал датчика – 4…20 мА.
Рис. 5.3. Внешний вид и конструкция датчика ДРК-1
5.2 Выбор исполнительных механизмов
Электрические исполнительные механизмы (ИМ) предназначены для перемещения регулирующих органов в системах автоматического регулирования технологическими процессами в соответствии с командными сигналами автоматических регулирующих и управляющих устройств.
Выбор ИМ осуществляется в зависимости от типа регулирующего органа по требуемому моменту [8]. Так как в исследуемой системе необходимо управлять расходом вещества, то в качестве регулирующего органа применяется поворотная заслонка. Момент, развиваемый двигателем ИМ, должен быть больше реактивного момента Мреак обусловленного стремлением потока вещества закрыть заслонку, из-за необходимости учета затяжки сальников и трения в опорах. Так как момент сил трения трудно учитывать, обычно выбирают ИМ с моментом вдвое больше реактивного вращающего момента [7]:
Мим = 2 PD3, PD3,
где  - коэффициент, зависящий от угла поворота заслонки (при = 65 - 70°С значение этого коэффициента максимально и равно 0.07), - коэффициент, зависящий от угла поворота заслонки (при = 65 - 70°С значение этого коэффициента максимально и равно 0.07),  Р - перепад давления на диске заслонки (Па), D - диаметр диска заслонки (м). Р - перепад давления на диске заслонки (Па), D - диаметр диска заслонки (м).
Выберем заслонку диаметром в 10 см, что соответствует диаметру прохода в седле трубопровода. Положим, что перепад давления на диске заслонки составляет Р = 24500 Па. Тогда реактивный момент равен:
Мреак = =1.715 =1.715  . .
Следовательно, двигатель должен развивать момент не меньше, чем 3,43 .
Выберем ИМ, который удовлетворяет рассчитанным параметрам. Для управления заслонками выбираются [18] однооборотные двигатели МЭО или многооборотные МЭМ - исполнительные механизмы, которые выпускаются в комплекте с определенным типом усилителя мощности.
Однооборотные ИМ типа МЭО поворачиваются на требуемый угол за указанное в маркировке время. Такой тип ИМ выпускается с концевыми выключателями, ограничивающими положение выходного вала и сигнализирующими о достижении предельных значений этого положения. Характерной особенностью двигателей типа МЭО является их высокое быстродействие, возможность длительной работы в стопорном режиме при полном напряжении питания, отсутствие ограничения по продолжительности и частоте включений.
В качестве ИМ выберем МЭО-6,3/10-0,25-01 (рис. 5.3), который имеет следующие технические характеристики, представленные в таблице 5.3:
Таблица 5.3 Технические характеристики исполнительных механизмов серии МЭО-6,3/10-0,25-01
| Наименование характеристики
|
Величина характеристики
|
| Номинальный момент на выходном валу,
|
16
|
| Время одного оборота выходного вала, с
|
10
|
| Максимальный рабочий угол поворота выходного вала, °
|
90
|
| Напряжение питания при частоте 50 Гц, В
|
24
|
| Потребляемая мощность, Вт
|
110
|
| Масса, кг
|
7,3
|
| Максимальная частота включений, кл/час
|
1200
|
Исполнительный механизм типа МЭО - 16-93 выпускается в комплекте с тиристорным усилителем ФЦ-0610, датчиком положения ДУП-М, пускателем бесконтактным реверсивным ПБР-2М, механизмом сигнализации положения МСП, блоком питания БП-24 и другим сопутствующим оборудованием.
Рис. 5.3 Внешний вид и конструкция ИМ МЭО - 16-93
5.3 Расчет разрядности АЦП и МК
Основываясь на информации о требуемой точности представления управляемых величин, их диапазоне изменения и количестве округлений в каждом используемом алгоритме первичной обработки информации, оценим длину разрядной сетки АЦП и АЛУ микроконтроллера.
Имеется три измеряемых величины: температура, давление, расход. Для их измерения используются датчики T7/MPX, 27SP, ДРК-1.
Требуемая точность контроля параметров равна:

Посчитаем разрядность АЦП, необходимую для считывания информации с датчиков, по формуле [14]:
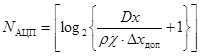 ,(5.1) ,(5.1)
где Dx — диапазон изменения сигнала,  и и  — коэффициенты, характеризующие доли погрешности вычислений, приходящиеся на датчики и АЦП соответственно. В соответствии с техническими характеристиками датчиков выбираем - = 0,35; = 0,5. Рассчитаем погрешность показаний каждого датчика по формуле: — коэффициенты, характеризующие доли погрешности вычислений, приходящиеся на датчики и АЦП соответственно. В соответствии с техническими характеристиками датчиков выбираем - = 0,35; = 0,5. Рассчитаем погрешность показаний каждого датчика по формуле:
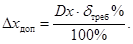 (5.2) (5.2)
В соответствии с (5.2) рассчитаем  для каждого измеряемого параметра: для каждого измеряемого параметра:  , ,  , ,  . .
Теперь по формуле (49) найдем количество разрядов АЦП, необходимое для каждого из каналов: 
Выберем максимальное из них:  = 10. Рассчитаем число дополнительных разрядов в АЛУ микроконтроллера по формуле: = 10. Рассчитаем число дополнительных разрядов в АЛУ микроконтроллера по формуле:
 , ,
где  - количество округлений для каждого алгоритма, - количество округлений для каждого алгоритма,  - коэффициент ослабления помехи, - коэффициент ослабления помехи,  - коэффициент преобразования. - коэффициент преобразования.
Подставив значения количества округлений для каждого алгоритма (m1 = 9, т2 = 30, т3 = 3, т4 = 4), приняв значение коэффициента ослабления помехи = 5 и найдя значение коэффициента преобразования по формуле:
получим, что число дополнительных разрядов равно нулю.
Однако из-за погрешностей округления в алгоритме вычисления управляющего воздействия это число возрастет, но не более, чем на 4 разряда. А поскольку в микроконтроллере разрядность кратна байту, то АЛУ выбираемого микроконтроллера должно быть 16-ти разрядным.
Проверим выбранные технические средства по быстродействию. Для этого необходимо обеспечение условия:
 ,(5.3) ,(5.3)
где  - время вычислений в микроконтроллере, для заданных алгоритмов, - время вычислений в микроконтроллере, для заданных алгоритмов,  - время преобразований аналоговых сигналов в цифровой код, - время преобразований аналоговых сигналов в цифровой код,  - время, затрачиваемое аппаратурой передачи данных на передачу информации от объекта управления к контроллеру и обратно. Подставив данные для микроконтроллера и АЦП в формулу (5.3), получим: - время, затрачиваемое аппаратурой передачи данных на передачу информации от объекта управления к контроллеру и обратно. Подставив данные для микроконтроллера и АЦП в формулу (5.3), получим:
 .(5.4) .(5.4)
Так как неравенство (5.4) выполняется, следовательно микроконтроллер и АЦП подходят по быстродействию для реализации системы.
5.4 Схема соединения устройств автоматизации
Фирма Advantech [19] предлагает широкий ассортимент технических средств автоматизации, в том числе модули серии ADAM-4000, которые в сочетании с функциональными возможностями программного обеспечения TRACE MODE позволяют просто решить большинство задач разработки масштабируемых систем распределенного сбора данных и управления.
При помощи модулей ADAM можно реализовать все необходимые функции разработанной автоматизированной системы управления: организацию ввода в микроконтроллер данных с датчиков и вывода сигналов на исполнительные механизмы, сопряжение с ЭВМ PC для осуществления контроля переменных системы. Основной причиной выбора устройств ADAM для технической реализации разработанной системы является то, что они совместимы с пакетом сбора данных, управления и контроля TRACE MODE, в котором разработан мониторинг системы контроля состояния подсистем нефтеналивного танкера. К тому же модули ADAM имеют хорошие функциональные, надежностные и качественные характеристики.
Компоненты, необходимые для сборки, инсталляции и конфигурирования сети из модулей ADAM:
• Модули ADAM;
• Системный компьютер, совместимый со стандартом IBM PC/AT, способный передавать символы в ASCII формате через порт RS-232 или RS-485;
• Источник питания модулей ADAM (от 10 до 30 В постоянного тока);
• Преобразователь интерфейса (при необходимости);
• Повторитель (при необходимости).
5.4.1 Общие характеристики модулей серии
ADAM-4000
Модули серии ADAM-4000 являются малогабаритными многофункциональными интеллектуальными устройствами связи с объектом, специально разработанными для применения в промышленных условиях эксплуатации. Встроенный микропроцессор, входящий в состав каждого изделия, обеспечивает независимое от управляющей вычислительной системы выполнение функций гальванически изолированного ввода-вывода аналоговых и дискретных сигналов с последующей их нормализацией, фильтрацией и преобразованием в форму, пригодную для передачи по последовательному каналу связи, а также информационный обмен с ведущим узлом сети передачи данных на базе интерфейса RS-485.
Для обмена данными в системах на базе устройств ADAM используется единственная витая пара. Вследствие высоких уровней шумов, в промышленных условиях предпочтительнее использовать именно экранированные витые пары. Для обеспечения качественной, надежной связи в устройствах серии ADAM реализованы специальные цепи подавления и защиты от помех. Это упрощает монтажные и пуско-наладочные работы, а также позволяет снизить общую стоимость системы за счет сокращения затрат на кабельную продукцию, разъемные соединения, повторители и дополнительные фильтры.
Для увеличения протяженности линии связи, на основе которой организуется сеть модулей ADAM-4000, а также для включения в состав сети более 32 устройств имеется возможность применения повторителя ADAM-4510, предназначенного для усиления сигналов интерфейса RS-485. Каждый повторитель обеспечивает возможность организации очередного сегмента сети длиной до 1200 м, содержащего до 32 модулей серии ADAM. Общее количество устройств, образующих сеть и управляемых через один последовательный порт главной вычислительной системы, может составлять 256.
Протокол обмена с устройствами серии ADAM-4000 представляет собой набор команд в виде символьных строк в формате ASCII. Опрос устройств прикладными программами состоит из простых операций записи и чтения символьных строк из последовательного порта, что легко реализуется на любом языке программирования, подобном Си, Паскаль и Бейсик. Поддержка символьного протокола в формате ASCII означает, что имеется возможность создания сети устройств серии ADAM на базе вычислительных систем практически любых типов и производителей.
Программная поддержка модулей ADAM-4000 реализована для большинства наиболее популярных пакетов разработки программного обеспечения сбора данных, управления и диспетчерского контроля, подобных GENESIS, TRACE MODE, GENIE и др. При использовании указанных инструментальных средств разработка программного обеспечения сбора данных и управления может быть проведена практически без участия квалифицированных программистов.
В модулях ADAM реализована функция удаленной программной настройки типов и диапазонов принимаемых аналоговых сигналов, что обеспечивает возможность их сопряжения с различными датчиками и преобразователями непрерывных параметров.
Тип и диапазон входного сигнала устанавливается путем передачи в адрес модуля по последовательному каналу связи соответствующей команды от управляющей ЭВМ. Таким образом, для решения различных измерительных задач возможно применение модулей одного и того же типа, что существенно сокращает затраты на разработку и обслуживание системы, а также придает ей универсальность.
Для создания системы управления на базе модулей серии ADAM-4000 будем использовать IBM PC-совместимый контроллер связи ADAM-4500 в качестве ведущего узла сети.
5.4.2
IBM PC-совместимый контроллер связи ADAM-4500
Устройство ADAM-4500 является функционально законченным автономным контроллером связи, предназначенным для реализации распределенных систем сбора данных и управления. Контроллер ADAM-4500 содержит встроенную операционную систему ROM-DOS, совместимую с MS-DOS, за исключением поддержки стандартного сервиса системы BIOS. Применение данного контроллера предоставляет пользователю возможность создания программного обеспечения на языках высокого уровня с использованием персональных IBM PC совместимых ЭВМ.
Контроллер ADAM-4500 имеет в своем составе два коммуникационных порта (СОМ1 и COM2), которые обеспечивают возможность организации взаимодействия практически с любыми устройствами с последовательным доступом. Порт СОМ1 может быть настроен на функционирование в режиме интерфейсов RS-232 или RS-485 путем установки соответствующего переключателя. Порт COM2 работает в режиме RS-485. Данная конфигурация портов контроллера позволяет реализовывать различные приложения с интенсивным обменом по двум последовательным каналам связи.
Часы реального времени, входящие в состав контроллера, обеспечивают возможность получения точных меток времени при фиксации каких-либо событий в контролируемой прикладной области. Сторожевой таймер предназначен для осуществления повторного запуска системы в случае непредвиденной остановки исполнения программы.
Внешний вид контроллера связи ADAM-4500 показан на рисунке 5.4.

Рис. 5.4 IBM PC совместимый контроллер связи ADAM-4500
Основные технические характеристики контроллера:
• процессор: AMD 188Е8-40МГц;
• ОЗУ: 256 кб (234 кбайт памяти доступны для прикладных программ);
• Flash-диск: 256 кб (170 кбайт доступны для хранения прикладных программ);
• операционная система: Datalight ROM-DOS, совместимая с MS-DOS;
• встроенные часы реального времени;
• сторожевой таймер;
• последовательные порты: СОМ1 и COM2 (СОМ1 - RS-232/RS-485; COM2-RS-485);
• интерфейс RS-232:
• сигналы: TxD, RxD, RTS, CIS, DTR, DSR, DCD, RI, GND, о режим обмена: асинхронный полнодуплексный, "точка-точка",
• скорость обмена: до 115200 бит/с,
• максимальная протяженность линии связи: до 15,2м (по стандарту);
• интерфейс RS-485:
• сигналы: DATA+, DATA-, GND,
• режим обмена: асинхронный полудуплексный, многоточечный,
• скорость обмена: до 115200 бит/с,
• используемые линии порта RS-232 для загрузки программного обеспечения: TxD, RxD, GND;
• автоматическое определение направления потока данных в режиме RS-485;
• питание нестабилизированным постоянным напряжением: 10...30 В, защита от изменения полярности напряжения питания;
• рабочий диапазон температур -10°С...+70°С;
• габаритные размеры: 120 х60 мм;
• потребляемая мощность: 2 Вт;
• микромонитор реального времени TRACE MODE;
• до 128 точек ввода/вывода;
• до 32 программ.
Для организации ввода аналоговых сигналов с датчиков будем использовать модуль аналогового ввода серии ADAM-4000. Так как в разработанной системе шесть измеряемых величин, то необходимо шесть каналов ввода. Можно поставить 6 одноканальных устройств ввода, но с точки зрения экономической эффективности, а также экономии пространства и удобства обслуживания системы, для технической реализации выберем восьмиканальный модуль аналогового ввода ADAM-4017.
5.4.3 Модули аналогового ввода серии ADAM-4000
Модули аналогового ввода имеют в своем составе 16-разрядный сигма-дельта аналого-цифровой преобразователь (АЦП), управляемый микропроцессором, который предназначен для приема и преобразования сигналов термопар, термометров сопротивления, а также аналоговых сигналов в виде тока или напряжения. Микропроцессор выполняет преобразование цифровых отсчетов аналогового сигнала, поступающих с выхода АЦП, в значения, представляемые в одном из следующих форматов: инженерные единицы, проценты полной шкалы, дополнительный код или Омы. После получения запроса на передачу данных от ведущего узла сети на базе RS-485 микропроцессор модуля передает отсчет входного аналогового сигнала, представленный в одном из перечисленных форматов, в адрес ведущего узла сети.
5.4.4 Восьмиканальный модуль аналогового ввода
ADAM-4017
Модуль ADAM-4017 является 8-канальным устройством аналогового ввода, оснащенным 16-разрядным АЦП и имеющим устанавливаемый программным способом для всех каналов диапазон и тип входных аналоговых сигналов. Модуль представляет собой наиболее экономичное решение для создания территориально распределенных автоматизированных систем сбора данных. ADAM-4017 имеет гальваническую развязку между подсистемой аналогового ввода и встроенным микропроцессором с напряжением 3000 В постоянного тока, что значительно снижает вероятность повреждения устройств и ведущей вычислительной системы помехами и наводками высокой интенсивности, характерными для промышленных условий эксплуатации
Технические характеристики модуля ввода ADAM-4017:
• количество и тип каналов аналогового ввода: 6 дифференциальных, 2 однополярных;
• тип входного сигнала: напряжение (мВ), напряжение (В), ток (мА);
• диапазон входного сигнала: ±150 мВ, ±500 мВ, ±1 В, ±5 В, ±10 В, ±20 мА;
• напряжение изоляции: 3000 В постоянного тока;
• защита от перенапряжения по входу до ±35 В;
• время аналого-цифрового преобразования (для 8 каналов): 100 мс;
• полоса пропускания: 13,1 Гц;
• основная погрешность измерения: не хуже ±0,1 %;
• температурный коэффициент смещения нуля: ±6 мкВ/'С;
• температурный коэффициент смещения шкалы: ±25 РРМ/°С;
• коэффициент ослабления помехи общего вида на частоте 50 Гц: не менее 92 дБ;
• встроенный сторожевой таймер;
• напряжение питания: от 10 до 30 В (постоянное нестабилизированное);
• потребляемая мощность: 1,2 Вт.
Модуль ADAM-4017 имеет все средства, необходимые для считывания аналоговых сигналов (8 channel multiplexer), преобразования в цифровой код (A/D converter), фильтрации (Filter l0Hz).
Для вывода управляющих сигналов на исполнительные механизмы будем использовать два одноканальных модуля аналогового вывода ADAM
-
4021 (удобнее было бы использовать двухканальный модуль вывода, но в серии ADAM-4000 такого устройства не предусмотрено).
5.4.5 Модули аналогового вывода серии
ADAM-4000
Модуль аналогового вывода
ADAM-4021
Модули аналогового вывода принимают по линии интерфейса RS-485 цифровые данные от системного компьютера. В зависимости от конфигурации модуля данные могут передаваться в технических величинах, в шестнадцатеричном дополнительном коде или в процентах шкалы диапазона. Затем, с помощью управляемого микропроцессором ЦАП, модули преобразуют цифровые данные в выходные аналоговые сигналы.
Модуль аналогового вывода ADAM-4021 имеет один канал аналогового вывода, который может функционировать в одном из нескольких диапазонов выходного тока или напряжения. Кроме того, имеется возможность программной установки начального значения и скорости изменения выходного сигнала. Для предотвращения последствий наличия гальванической связи с контролируемым оборудованием, а также снижения вероятности повреждения системы импульсными помехами и бросками напряжения в цепях питания модуль оснащен цепями гальванической развязки.
Модуль ADAM-4021 имеет в своем составе аналого-цифровой преобразователь, независимый от цифро-аналогового преобразователя. Поскольку указанный АЦП не предназначен для выполнения измерений с высокой точностью, на него возлагается задача проверки правильности функционирования канала вывода. Кроме того, данные, получаемые от АЦП, могут использоваться для выявления факта и определения причины возникшей неисправности.
Технические характеристики модуля вывода ADAM-4021:
• количество каналов: 1;
• диапазон выходного сигнала: 0...20 мА; 4...20 мА; 0...10 В;
• напряжение изоляции: 3000 В постоянного тока;
• основная погрешность: в режиме формирования тока не хуже ±0,1% полной шкалы; в режиме формирования напряжения не хуже ±0,2% полной шкалы;
• погрешность АЦП контроля выходного сигнала: не хуже ±1 % полной шкалы;
• температурный коэффициент смещения нуля: в режиме формирования тока ±0,2 мкВ/°С; в режиме формирования напряжения ±30,0 мкВ/°С;
• температурный коэффициент смещения шкалы ±25 РРМ/°С;
• скорость нарастания выходного сигнала (устанавливается программно): от 0,125 до 128 мА/с; от 0,0625 до 64 В/с;
• сопротивление нагрузки: 0...500 Ом;
• встроенный сторожевой таймер;
• требования по питанию;
• напряжение питания: от 10 до 30 В (постоянное нестабилизированное);
• потребляемая мощность: 1,4 Вт.
В связи с тем, что необходимо сопряжение ЭВМ и нижнего уровня управления, включающего в себя все выбранные модули ADAM, для организации автоматизированной системы управления необходимо использовать преобразователь интерфейса RS-485 в USB.
Модуль
ADAM-4561 - преобразователь интерфейса RS-232/422/485 в USB
ADAM-4561 позволяет пользователям ЭВМ PC соединять модули ADAM в общую систему, использующую USB-интерфейс. ADAM-4561 обеспечивает очень высокую скорость передачи данных. Так как модуль питается с USB-порта, то не требуется использования дополнительного силового адаптера, загромождающего систему.
USB-интерфейс является стандартным для большинства современных компьютеров, так как имеет очевидные преимущества над ранее используемыми каналами передачи информации. Посредством USB-интерфейса можно соединять до 127 устройств, при этом скорость передачи данных будет до 12 мегабит в секунду.
Технические характеристики модуля ADAM-4561:
• соответствует спецификации USB v 1.1;
• поддержка портов RS-232/422/485;
• скорость передачи: 115200 бит/с;
• автоматический контроль направления передачи данных по RS-485;
• гальваническая изоляция 3000 В;
• максимальная длина кабеля USB до 4,5 м;
• не требует внешнего питания;
• программная поддержка в среде Windows, Linux;
• поддержка «горячего резервирования».
Схема соединения модулей разработанной системы управления представлена на чертеже ЦТРК 2101.980401.Э4-03.
Объединение устройств системы в сеть RS-485 предполагает установку терминаторных сопротивлений в начале и конце сети для согласования уровня сигнала. Значение сопротивлений для витой пары типа А или В выбирается равным 120 Ом.
Так как проектируемая система включает в себя всего 5 устройств (ADAM 4500, ADAM 4561, ADAM 4017 и два ADAM 4021), то предполагается установить все модули компактно в одном помещении, поэтому нет необходимости в повторителе.
5.5 Конструктивное исполнение разработки
В связи с тем, что техническую реализацию разработанной системы предлагается выполнить на стандартных устройствах: модулях серии ADAM производства фирмы Advantech, исполнительных механизмах МЭО-16-10, а также на конструктивно законченных датчиках, - то нет необходимости разрабатывать специальную конструкцию, вмещающую в себя все элементы системы управления.
Датчики технологических параметров, исполнительные механизмы и регулирующие органы устанавливаются непосредственно на объекте управления, поэтому рассмотрим возможные конструкции из модулей ADAM, которые будут располагаться в операторской.
Модули ADAM могут монтироваться автономно, на специальные монтажные скобы, на рельс типа DIN или могут устанавливаться пакетом (этажеркой). Прочное и компактное конструктивное исполнение модулей обеспечивает простоту и повышенные удобства их монтажа. Для присоединения внешних цепей к модулям предусмотрены извлекаемые клеммные соединители с винтовой фиксацией проводников, что облегчает процесс электрического монтажа, технического обслуживания и дальнейшей модернизации системы и позволяет существенно сократить время, необходимое для замены модулей.
Технология соединения модулей в сеть RS-485, вместе с использованием крепящихся винтами вставных разъемов, позволяет выполнять наращивание, реконфигурирование и ремонт системы без нарушения кабельной системы.
Установка на DIN-рейку приводит систему в соответствие с современными требованиями к монтажу промышленного контрольно-измерительного оборудования.
При необходимости автономной установки модуля ADAM используется плоская панель, имеющая габариты, идентичные габаритам модуля. Панель устанавливается на стенку помещения. Для монтажа модулей на панель используется специальный кронштейн. Также имеется возможность установки одного модуля поверх другого, которая идеальна в условиях ограниченного пространства. Это - так называемая комбинированная установка.
Габаритные размеры универсальны для всех модулей серии ADAM. Они указаны на рисунке 5.5.
а б
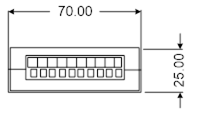 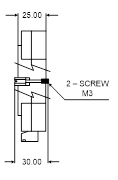
В г
а – вид спереди, б – вид сзади, в – вид сверху, г – вид сбоку
Рис. 5.5 Габаритные размеры модулей ADAM
Так как разработанная система управления требует для реализации 5 модулей серии ADAM, которые будут установлены в операторском помещении, то для монтажа модулей предлагается использовать удобный DIN-рейс, поставляемый вместе с модулями. Для фиксации модуля на DIN-рейсе используется специальный адаптер.
6. ТЕХНИЧЕСКАЯ РЕАЛИЗАЦИЯ СИСТЕМЫ КОНТРОЛЯ
6.1 Реализация диспетчерского уровня системы
Для организации диспетчерского уровня системы контроля подсистем танкера выбрана интегрированная система TRACE MODE. Благодаря использованию современной интегрированной SCADA-системы TRACE MODE (версии 6.0) для организации верхнего уровня системы управления обеспечивается наглядное отображение в реальном времени процессов, происходящих в технологическом объекте [9].
TRACE MODE - это программный пакет для быстрой и эффективной разработки и внедрения систем управления производственным процессом.
Основными задачами, решаемыми с помощью TRACE MODE являются [18]:
• Сбор сигналов, определяющих состояние процесса в текущий момент времени (температура, давление, положение и т.д.) с промышленной аппаратуры (контроллеры, датчики и т.д.).
• Графическое отображение собранных данных на экране компьютера в удобной для оператора форме (на мнемосхемах, индикаторах, сигнальных элементах, в виде текстовых сообщений и т.д.).
• Автоматический контроль за состоянием контролируемых параметров и генерация сигналов тревоги, выдача сообщений оператору в графической и текстовой форме в случае выхода их за пределы заданного диапазона.
• Разработка и выполнение (автоматическое или по команде оператора) алгоритмов управления производственным процессом. Сложность алгоритмов не ограничена и может представлять собой любую комбинацию из математических, логических и других операций.
• Вывод (автоматически или по команде оператора) управляющих воздействий в промышленные контроллеры и исполнительные механизмы для регулировки непрерывных или дискретных процессов, а также подача сообщений персоналу на информационное табло.
• Контроль за действиями оператора путем регистрации его в системе с помощью имени и пароля, и назначения ему определенных прав доступа, ограничивающих возможности оператора (если это необходимо) по управлению производственным процессом.
• Автоматическое ведение журнала событий, в котором регистрируется изменение параметров с возможностью просмотра в графическом виде записанных данных, а также ведение журнала аварийных сообщений.
• Генерация отчетов и оперативных сводок.
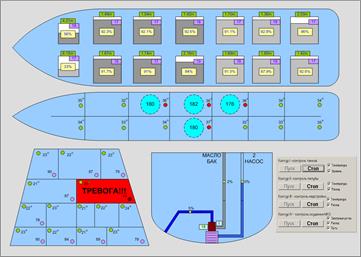
Рис. 6.1 Мнемосхема системы контроля подсистем танкера
В TRACE MODE распределенная АСУ, включающая в себя операторские станции, АРМ руководителей, архивные серверы и контроллеры, рассматривается как один проект. База данных реального времени является распределенной и единой для всего проекта. Поэтому каждый узел (ПК или контроллер) в распределенной АСУТП, работающей под управлением TRACE MODE, имеет информацию об остальных узлах системы и в случае его модификации автоматически обновляет соответствующие базы на других узлах.
При помощи TRACE MODE возможно одновременно программировать задачи приема данных и управления в IBM-совместимых контроллерах и задачи супервизорного контроля и управления для АРМ диспетчеров на ПК. Вся разработка осуществляется в графическом редакторе, основанном на требованиях международного стандарта IEC-1131. Применяются визуальные, интуитивно понятные инженерам-технологам методы - язык функциональных блоков (Техно FBD) или язык инструкций (Техно IL).
Документация о ходе технологического процесса представляется в виде отчетов произвольной формы. Отчеты, генерируемые TRACE MODE, могут включать данные, как реального времени, так и исторические. Информация может быть представлена в текстовом, графическом или табличном виде.
TRACE MODE включает в себя библиотеку из более, чем 150 алгоритмов обработки данных и управления, в том числе такие алгоритмы контроля как фильтрация, проверка на технологические границы и достоверность.
Таким образом, очевидно удобство использования программы TRACE MODE для организации диспетчерского уровня системы контроля состояния подсистем нефтеналивного танкера. С помощью TRACE MODE было разработано визуализированное представление на экране компьютера технологического объекта (рис. 6.1) с выведением текущих значений переменных; создан журнал событий и тревог, в которых регистрируется изменение параметров объекта с возможностью просмотра в графическом виде записанных данных, а также выводятся сообщения, выдаваемые оператору в случае выхода параметров за пределы заданного диапазона.
На основании выбранных модулей ADAM составляем принципиальную схему системы контроля состояния подсистем танкера размещенную в приложении 3.
7. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ПРОЕКТА
7.1 Обоснование необходимости и актуальности работы
При проектировании системы управления технологическим объектом необходимо рассмотреть все возможные способы ее реализации и выбрать наиболее эффективный. Существуют различные типы управления системой диагностики подсистем танкера. Выбор алгоритма управления в первую очередь зависит от свойств самого объекта, поэтому имеет смысл сосредоточить внимание на известных системах регулирования конкретным объектом, в данном случае – системе диагностики подсистем кондиционирования, пожаротушения и затопления водой танкера "Barstorm".
Осушительно-балластные средства современного судна являются важной частью общесудовых систем и охватываются автоматизированной системой КАС. Комплекс осушительно-балластных средств с автоматикой управления может быть разделен соответственно иерархической структуре на ряд подсистем защиты от затопления (диагностики, сигнализации, откачки воды т. д., как основанные преимущественно на механической и пневмогидравлической технике).
Большое количество нефтеналивных танкеров нуждаются в системе идентификации и диагностики состояния судна. Большая часть аварий на танкерах возникала вследствие пожаров, которые вызывали пробоины судна и как следствие в большинстве случаев его гибель. По статистике за 2003 год на Российских танкерах возникало 568 пожаров. Это связано в первую очередь с несовершенством системы идентификации и диагностики. В связи с несвоевременной реакцией персонала судна на возникновение пожара за 2003 год возникло 267 пожаров. Стоимость таких несовершенных систем составляет в среднем около 100000 рублей (данные усреднены по 16 нефтеналивным танкерам водоизмещением более 85000 тонн). Высокая стоимость существующих систем связана в первую очередь с тем, что системы диагностики состояния построены в основном на аналоговой технике. Для повышения надежности приходится устанавливать большое количество дублирующих блоков и узлов. Среди недостатков особо стоит отметить отсутствие визуализации состояния судна в целом.
В отличие от существующих систем разрабатываемая система будет построена целиком на цифровой технике. Это дает возможность избежать дублирования частей системы, а также позволяет получать своевременную информацию о состоянии всего судна в целом.
7.2
Обоснование выбора аналога для сравнения
Рассмотрим наиболее часто встречающиеся реализации существующих систем диагностики состояния подсистем танкера.
а) ручное управление (БА-2) с использованием дискретных регуляторов на некоторых участках подсистемы. Такая система используется на танкерах водоизмещением до 4000 тонн и является не автоматической. При таком способе качество управления неудовлетворительно, так как оно не обеспечивает требуемой точности. Главный недостаток такой системы несвоевременная реакция на аварийную ситуацию.
б) система управления с одним регулятором (Кинг), где управляющей переменной является скорость повышения уровня воды, а главной регулируемой переменной расход воды откачиваемой осушительной системой. Введение обратной связи лишь по регулируемой переменной не в состоянии обеспечить нужное качество управления. Такая система используется на танкерах от 4000 до 20000 тонн и не обеспечивает требуемой скорости откачки воды.
в) система управления с регулятором состояния и наблюдателем (КАСО2-56) дает лучшее качество с точки зрения демпфирования и числа колебаний. Управляющей и регулируемыми переменными являются те же, что и в предыдущей системе. Такая система используется на танкерах от 20000 до 40000 тонн и не обеспечивает требуемой скорости откачки воды и своевременной реакции на аварийную ситуацию.
г) система управления с алгоритмом управления второго порядка с прямой связью (Ostin) использует информацию о скорости повышения уровня воды в затопляемых помещениях, и управляет числом подключаемых каскадов системы. Такая система используется на танкерах от 40000 до 85000 тонн и по сути своей является интеллектуальной. В зависимости от степени тяжести аварии последовательно подключаются части системы для борьбы с ней.
В силу того что, применение цифрового регулятора повышает качество управления, систему управления с алгоритмом управления второго порядка с прямой связью (Ostin) будем рассматривать как аналог разработанной системы оптимального управления, так как они имеют одни и те же регулируемые переменные и сопоставимые качественные характеристики.
7.3 Обоснование критериев сравнения разрабатываемого устройства с аналогом
Представим сравнительный анализ разработанной системы управления с аналогичной в виде таблицы 7.1. Выбор номенклатуры критериев качества будем производить в соответствии со стандартами Морского Регистра России от 18.06.2005 г раз. 18, ст. 9.
Расчет интегрального показателя качества разработки будем вести по формуле:

где qi – весовой коэффициент i-го параметра;
Kxi – значение i-го параметра в относительных единицах;
n - количество критериев;
IT – интегральный показатель качества разработки.
Таблица 7.1 Интегральный показатель качества разработки
| №
|
Критерии качества
|
Вес
|
Новая разработка
|
Аналог
|
| Значение
|
Кх
|
q*Kx
|
Значение
|
Кх
|
q*Kx
|
| 1
|
Точность
|
0,4
|
99%
|
9
|
3,6
|
98%
|
8
|
3,2
|
| 2
|
Экономичность
|
0,2
|
5 т/ч
|
8
|
1,6
|
5 т/ч
|
8
|
1,6
|
| 3
|
Функциональность
|
0,1
|
+
|
6
|
0,6
|
+
|
6
|
0,6
|
| 4
|
Безопасность
|
0,05
|
+
|
7
|
0,35
|
±
|
6
|
0,3
|
| 5
|
Надежность
|
0,05
|
12тыс.ч
|
8
|
0,4
|
8тыс.ч
|
5
|
0,25
|
| 6
|
Габариты, вес
|
0,04
|
средние
|
8
|
0,32
|
большие
|
6
|
0,24
|
| 7
|
Быстродействие
|
0,15
|
150 мин
|
7
|
1,05
|
180 мин
|
6
|
0,9
|
| 8
|
Эргономичность
|
0,01
|
+
|
9
|
0,09
|
±
|
8
|
0,08
|
| 1=1
|
1
|
Абс.пок.кач.
|
8,01
|
Абс.пок.кач.
|
7,17
|
На основании полученных данных (табл. 7.1) видно, что абсолютный показатель качества разработки составляет IT=8,01. Относительный показатель качества разработки равен: IT0=ITр/ITа=8,01/7,17=1,12>1, следовательно, разработанная система имеет преимущество перед аналогом и делает процесс диагностики подсистем более эффективным.
7.4 Расчет затрат на этапе проектирования
Для расчета затрат на этапе проектирования определим продолжительность каждой работы (начиная с составления технического задания (ТЗ) и до оформления документации включительно. Продолжительность работ рассчитаем по экспертным оценкам по формуле:
to = (3tmin +2tmax)/5,(7.1)
где to - ожидаемая длительность работы:
tmin и tmax - соответственно наименьшая и наибольшая, по мнению эксперта длительность работы.
Все расчеты сведем в таблицу (табл. 7.2).
Таблица 7.2 Ожидаемые длительности работ на этапе проектирования
| Наименование работы
|
Длительность работы, дн.
|
| миним.
|
макс.
|
ожидаемая
|
| 1. Разработка ТЗ
|
2
|
4
|
3
|
| 2. Анализ ТЗ и работа с источниками
|
6
|
12
|
9
|
| 3. Разработка программного обеспечения
|
11
|
18
|
14
|
| 4. Выбор исполнительных органов и механизмов
|
2
|
4
|
3
|
| 5. Выбор датчиков
|
2
|
4
|
3
|
| 6. Оформление плакатов
|
2
|
4
|
3
|
| 7. Оформление пояснительной записки
|
17
|
20
|
19
|
Для определения продолжительности этапа проектирования Тп по данным таблицы 7.2 построим график организации работ во времени (рис. 7.2). При построении графика расположим работы с некоторой параллельностью.
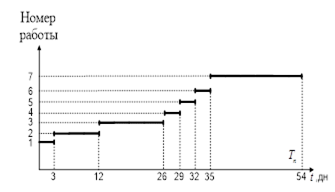
Рис. 7.1. График организации работ на этапе проектирования
Капитальные затраты на этапе проектирования Кп рассчитаем по формуле:
Кп = Zп + Мп + Нп,(7.2)
где Zп -заработная плата проектировщика задачи на всем этапе проектирования Тп ;
Мп - затраты за использование ЭВМ на этапе проектирования;
Нп - накладные расходы на этапе проектирования.
Одним из основных видов затрат на этапе проектирования является заработная плата проектировщика, которую рассчитаем по формуле:
Zп = zд Тп (1 + ас /100) (1 + ап /100),(7.3)
где zд -дневная заработная плата разработчика задачи на этапе проектирования; ас - процент отчислений на социальное страхование (ас=37%); ап - процент премий.
Zп = 80•54•(1 + 37/100) (1 + 25/100)=7398 руб. (7.4)
При расчете Мп учтем время на подготовку исходных текстов программ, их отладку и решение контрольного примера.
М= Cп tп + Cд tд,(7.5)
где Cп и Cд - соответственно стоимость 1 часа процессорного и дисплейного времени; tп и tд - необходимое для решения задачи процессорное и дисплейное время соответственно (час).
Мп=36дней•8часов•9,35 руб/час=2688 руб. (7.6)
Накладные расходы на этапе проектирования будут составлять:
Нп=0,8•7398=5920 руб. (7.7)
Тогда капитальные затраты на этапе проектирования равны:
Кп =7398+2688+5920 = 16004 руб. (7.8)
7.5 Расчет трудоемкости разработки программного продукта
Определение трудоемкости t по этапам работ, связанных с разработкой ПП выполним по данным таблицы 7.3.
Таблица 7.3 Продолжительность этапов работ, в процентах
| Наименование этапа разработки ПП
|
Размер ПП, n
|
| 0 < n < 2
|
| 1. Формулирование и анализ требований
|
10
|
| 2. Проектирование ПП(разработка алгоритмов)
|
19
|
| 3. Программирование
|
| 3.1. исх.текст и его автономная отладка
|
21
|
| 3.2. отладка процедур
|
42
|
| 4. Отладка контрольного примера (моделирование и т.п.)
|
18
|
После корректировки длительностей работ следует по формуле (7.4) рассчитать новое значение заработной платы Z' за период Т' (в нашем случае 14 дней). Затем по формуле аналогичной (7.8) определяем суммарные затраты на разработку ПП по формуле:
К' = Z' + M' + H',
где Z' - заработная плата (за период Т'=14 дн.)
М' - затраты на машинное время (за период Т'=14 дн.)
Н' - накладные расходы (за период Т'=14 дн.).
Таким образом:
Z' = 80•14•(1 + 37/100) (1 + 25/100)=1924 руб.
Мп=14дней•8часов•9,35 руб/час=1047 руб.
Нп=0,8•1924=1540 руб.
К' = 1924+1047+1540=4550 руб.
Цена ПП определяется по формуле
S = K' (1+ p/100),
где р - прибыль, получаемая разработчиком ПП, %.
Рекомендуется значение р брать из интервала (15-30). Предельное значение р £ 50%.
Тогда окончательно, получим:
S = 4550 (1+ 30/100)=6000 руб.
Далее посчитаем капитальные затраты, как сумму затрат на этапе проектирования и этапе разработки программного продукта.
К'' =Кп+К'
К"=4550+16004= 20600 руб.
Стоимостная оценка разработки потребует разбиения всех затрат при изготовлении системы на следующие экономические составляющие: затраты на покупные изделия, основная заработная плата производственных рабочих, накладные расходы, внепроизводственные расходы.
Калькуляцию каждой составляющей затрат производится на основе спецификаций комплекта конструкторской документации. Цены, тарифы и нормативы, использованные в расчетах, взяты усреднено в целом по отрасли «Судостроение». Транспортно-заготовительные расходы приняты в размере 10 % от стоимости покупных изделий (табл. 7.4).
Таблица 7.4 Затраты на покупные изделия
| Наименование
|
Количество, шт.
|
Цена единицы, руб.
|
Стоимость,
руб.
|
| Кабель RS-15
|
8
|
165
|
1320
|
| Стяжка пластиковая 100 шт./уп.
|
5
|
20
|
100
|
| Модуль ADAM 4050
|
1
|
2324
|
2324
|
| Модуль ADAM 4017
|
6
|
4256
|
25536
|
| Модуль ADAM 4021
|
1
|
4004
|
4004
|
| Модуль ADAM 4561
|
1
|
3080
|
3080
|
| Датчик влажности TS15
|
18
|
1250
|
22500
|
| Датчик положения YR-256S
|
6
|
980
|
5880
|
| Датчик температуры HT188974e
|
18
|
1400
|
25200
|
| Разъемы RG
|
100
|
4
|
400
|
| Крепеж Г-образный
|
100
|
6
|
600
|
| Транспортно-заготовительные расходы (10 %)
|
9095
|
| Итого
|
90950
|
При расчете основной заработной платы производственных рабочих использованы усредненные расценки стоимости работ в целом по отрасли «Судостроение». Трудоемкость и перечень видов работ установлены экспертным путем исходя из конструктивных и технологических особенностей разработки (табл. 7.5).
Таблица 7.5 Расчет основной заработной платы производственных рабочих
| Вид работ
|
Трудоемкость,
чел/час
|
Средняя часовая
тарифная ставка, руб.
|
Сумма,
руб.
|
| Монтаж кабелей
|
18,0
|
50
|
900,0
|
| Установка датчиков
|
6,0
|
140
|
840,0
|
| Монтаж модулей на стойки
|
2,0
|
140
|
280,0
|
| Сборочные работы
|
12,0
|
90
|
1080,0
|
| Контрольные операции
|
3,0
|
120
|
360,0
|
| Пуско-наладочные операции
|
20,0
|
420
|
8400
|
| Итого основная зарплата
|
11860
|
При выполнении калькуляции полной себестоимости разрабатываемого устройства сгруппируем дополнительно затраты по способу их отнесения на себестоимость единицы продукции: прямые материальные затраты, прямые трудовые затраты, накладные расходы и внепроизводственные расходы (табл. 7.6).
Величина дополнительной заработной платы составляет 8 %, а отчисления на социальные нужды, в соответствии с действующим законодательством, - 13% к основной заработной плате производственных рабочих. Накладные расходы определены в процентном отношении к основной заработной плате производственных рабочих исходя из конструктивных и технологических особенностей разработки следующим образом: расходы на содержание и эксплуатацию оборудования – 140 %, цеховые расходы – 50 %, общезаводские расходы – 100 %. Внепроизводственные расходы принимаем в размере 5% к производственной себестоимости.
Таблица 7.6 Калькуляция полной себестоимости устройства
| Наименование статьи калькуляции
|
Сумма,
руб.
|
| 1. Покупные комплектующие изделия
|
90950
|
| Итого, прямые материальные затраты:
|
90950
|
| 3. Основная заработная плата
|
11860,0
|
| 4. Дополнительная заработная плата (8 %)
|
948,8
|
| 5. Социальные отчисления (13 %)
|
1541,8
|
| Итого прямые трудовые затраты:
|
14350,6
|
| 6. Расходы на содержание и эксплуатацию оборудования (140 %)
|
16604,0
|
| 7. Цеховые расходы (50 %)
|
5930,0
|
| 8. Общезаводские расходы (100 %)
|
11860,0
|
| Итого, накладные расходы:
|
34394,0
|
| Производственная себестоимость
|
140 000
|
| 9. Внепроизводственные расходы (5 %)
|
7000
|
| Полная себестоимость
|
147 000
|
Исходя из назначения и области применения разработки, определим величину закладываемой прибыли в размере 40 % к полной себестоимости. Размер налога на добавленную стоимость (НДС) определяем как 20 % от продажной цены разработки за вычетом уже уплаченного НДС по приобретенным материалам и комплектующим (табл. 7.7).
Таблица 7.7 Определение возможной рыночной цены
| Наименование статьи калькуляции
|
Сумма,
руб.
|
| Полная себестоимость
|
147 000
|
| Закладываемая прибыль (40 %)
|
58 800
|
| Итого, продажная цена без НДС
|
205 800
|
| НДС, за вычетом уплаченного НДС по приобретенным материалам и комплектующим табл. 4.2 - 4.3 (20 %)
|
29400
|
| Итого, продажная цена с НДС
|
235 200
|
Полученное расчетное значение рыночной цены соответствует оценкам экспертов, а структура цены разработки аналогична усредненной по отрасли «Судостроение».
В таблице 7.8 приведен расчет цены потребления аналога и разработки. При определении единовременных капитальных затрат экспертная оценка расходов на транспортировку монтаж устройства, стоимость комплекта запасных частей составит: для аналога – 15 %, для разработки – 5 % к рыночной цене и плюс затраты на проектирование. При оценке эксплуатационных расходов экспертная оценка затрат на обслуживание, ремонт и др. составит: для аналога – 15 %, для разработки – 5 % к рыночной цене. Интегральный стоимостный показатель определится как: Ic=K+Зэ.
Таблица 7.8 Вычисление интегрального стоимостного показателя
| Наименование статьи калькуляции
|
Аналог
Сумма, руб.
|
Разработка
Сумма, руб.
|
| Полная себестоимость 
|
168 000
|
147 000
|
| Рыночная цена 
|
265 000
|
235 200
|
| Итого, единовременные капитальные затраты

|
339 750
|
267 560
|
| Итого, затраты на эксплуатацию за все время работы изделия

|
39 750
|
11 760
|
| Итого, интегральный стоимостный показатель (цена потребления)

|
344 500
|
258 720
|
7.7 Расчет экономического эффекта
Ожидаемый экономический эффект определяется по формуле;
Э0=Эг - Ен Кп,(7.9)
где Эг - годовая экономия
Кп – полные капитальные затраты
Ен - нормативный коэффициент (Ен=0,15)
Годовая экономия Эг складывается из экономии эксплуатационных расходов и экономии в связи с повышением производительности труда пользователя. Таким образом, получаем;
Эг = (Р1 - Р2) +DРп, (7.10)
где Р1 и Р2 - соответственно эксплуатационные расходы до и после внедрения: DРп - экономия от повышения производительности труда пользователя. Эксплуатационные расходы до внедрения составляли 39 750 рублей. После внедрения они будут составлять 11 760 рублей.
Экономия, связанная с повышением производительности труда DРп пользователя определяется по формуле:
DРп = Zп S
((D Тj /(tj -DТj))100)/100, (7.11)
где Zп - среднегодовая заработная плата пользователя, tj - время, которое планировалось пользователю для выполнения работы j-го вида до внедрения разработанных программ (час).
Таким образом, получим:
DРп = 36000•10/100=36000 руб,
Эг =(39750- 11760)+36000=63 990 руб,
Э0=63 990 – 0,15 16004=61 590 руб.
7.8 Сравнительная технико-экономическая эффективность разработки
Интегральный технико-экономический показатель определяется как
 , ,
где  – интегральный технико-экономический показатель; – интегральный технико-экономический показатель;  – интегральный стоимостный показатель (цена потребления). – интегральный стоимостный показатель (цена потребления).
Сравнительная технико-экономическая эффективность разработки
 , ,
где  - сравнительная технико-экономическая эффективность разработки; - сравнительная технико-экономическая эффективность разработки;
 – интегральный технико-экономический показатель разработки; – интегральный технико-экономический показатель разработки;
 – интегральный технико-экономический показатель аналога. – интегральный технико-экономический показатель аналога.
Подставив рассчитанные данные, имеем:
 =(8,01/258720) / (7,17/344500) = 1,48 =(8,01/258720) / (7,17/344500) = 1,48
Рассчитанные технико-экономические показатели разработки и показатели аналога, взятые из стандартов Морского Регистра России от 18.06.2005 г раз. 18, ст. 9 сведем в единую таблицу 7.9.
Таблица 7.9 Сравнение технико-экономических показателей аналога и разработки
| № п/п
|
Параметры и
характеристики
|
Значения
аналога
|
Значения
разработки
|
| Технические показатели
|
| 1
|
Точность, %
|
99
|
98
|
| 2
|
Экономичность, т/ч
|
5
|
5
|
| 3
|
Функциональность, ±
|
+
|
+
|
| 4
|
Безопасность, ±
|
+
|
±
|
| 5
|
Надежность, тыс.ч.
|
12
|
8
|
| 6
|
Габариты
|
средние
|
большие
|
| 7
|
Быстродействие, мин
|
150
|
180
|
| 8
|
Эргономичность, ±
|
+
|
±
|
| Экономические показатели
|
| 9
|
Полная себестоимость АС, руб
|
168 000
|
147 000
|
| 10
|
Рыночная цена Ц0, руб
|
265 000
|
235 200
|
| 11
|
Единовременные капитальные затраты К, руб
|
339 750
|
267 560
|
| 12
|
Затраты на эксплуатацию за все время работы изделия  , руб , руб
|
39 750
|
11 760
|
| 13
|
Интегральный стоимостный показатель Ic, руб
|
344 500
|
258 720
|
| 14
|
Экономический эффект Э0, руб
|
16 200
|
61 590
|
| 15
|
Сравнительная технико-экономическая эффективность Эср, ед
|
1,48
|
После выполнения расчетов технико-экономических показателей было получена сравнительная технико-экономическая эффективность равная 1,48, что свидетельствует о положительной оценке целесообразности внедрения разработки. Расчеты интегральных показателей выявили востребованность разработки с позиции потребителя. Рыночная цена разработки и применение в ней современных технологий делают систему диагностики состояния подсистем танкера особо привлекательной для потребителя относительно имеющихся аналогов.
8. БЕЗОПАСНОСТЬ И ЭКОЛОГИЧНОСТЬ ПРОЕКТА
Рассмотрим безопасность разработки в процессе ее эксплуатации с точки зрения оператора системы контроля подсистем танкера.
Использование компьютеров в различных сферах производственной деятельности выдвигает проблему оптимизации условий труда оператора ПЭВМ, ввиду формирования при этом целого ряда неблагоприятных для человека факторов: высокая интенсивность труда, монотонность производственного процесса, гипокинезия и гиподинамия, специфические условия зрительной работы, наличие электромагнитных излучений, тепловыделений и шума от технологического оборудования.
Учитывая актуальность проблемы охраны здоровья человека при работе с ПЭВМ, необходимо рассмотреть требования к организации и условиям труда оператора системы контроля состояния подсистем танкера.
8.1 Оценка напряженности работы оператора ПЭВМ
Внедрение современных компьютеров имеет как положительные, так и отрицательные моменты. С одной стороны, это обеспечение более высокой эффективности производства за счет совершенствования технологического процесса и повышения производительности труда, а с другой, - увеличение нагрузки на работающих в связи с интенсификацией производственной деятельности и специфическими условиями труда.
Выполнение производственных операций с помощью ПЭВМ связано с восприятием изображения на экране и одновременным различением текста рукописных или печатных материалов, выполнением машинописных, графических работ и других операций.
Работа операторов требует повышенных умственных усилий и большого нервно-эмоционального напряжения, решения в ограниченное время сложных задач, высокой концентрации внимания и особой ответственности выполняемого задания.
Нагрузка на зрение и напряжённый характер труда вызывает у операторов нарушения функционального состояния зрительного анализатора и центральной нервной системы. В процессе работы у них снижается устойчивость ясного видения, электрическая чувствительность и лабильность зрительного анализатора, острота зрения и объем аккомодации, а также нарушается мышечный баланс глаз [24].
Повышенное зрительное напряжение при работе с ПЭВМ обусловлено не только напряженным характером труда, но и рядом неблагоприятных факторов, а именно: постоянной переадаптацией глаз в условиях наличия в поле зрения поверхностей различной яркости, приспособлением к различению разно удаленных объектов, недостаточной четкостью и контрастностью изображения на экране, строчностью его структуры, яркостными мельканиями, плохим качеством исходного документа, используемого при работе в режиме ввода данных. При этом зрительное напряжение усугубляется наличием ярких пятен за счет отражения светового потока на клавиатуре и экране, неравномерностью освещения рабочих поверхностей, большим перепадом яркости между рабочей поверхностью и окружающими поверхностями.
Выполнение многих операций при работе с ПЭВМ требует длительного статического напряжения мышц спины, шеи, рук и ног, что приводит к быстрому развитию утомления. Основными причинами этого являются: нерациональная высота рабочей поверхности стола и сидения, отсутствие опорной спинки и подлокотников, неудобные углы сгибания в плечевом и локтевом суставах, угол наклона головы, неудобное размещение документов, видеотерминала и клавиатуры; неправильный угол наклона экрана; отсутствие пространства и подставки для ног.
Для того чтобы оценить степень напряженности труда оператора, воспользуемся существующими «Гигиеническими критериями оценки условий труда по показателям вредности и опасности факторов производственной среды, тяжести и напряженности трудового процесса». Проанализируем напряженность работы оператора, сгруппировав все показатели трудового процесса по видам нагрузок: интеллектуальные нагрузки, сенсорные нагрузки, эмоциональные нагрузки, а также дополнительно рассмотрим монотонность нагрузок и режим работы оператора.
1. Интеллектуальные нагрузки.
1.1. Содержание работы. Оператор решает сложные задачи с выбором действий по известным алгоритмам (класс условий труда 3.1).
1.2. Восприятие сигналов и их оценка. Так как программа, в которой разработан монитор управления процессом, сама отслеживает значения характеристик и сопоставляет их с требуемыми, то оператор только воспринимает сигналы от программы и корректирует свои действия в соответствии с ними (класс 2).
1.3. Распределение функций по степени сложности задания. Оператор осуществляет обработку, проверку и контроль за выполнением задания (класс 3.1).
1.4. Характер выполняемой работы. Работа оператора происходит по установленному предприятием графику (класс 2).
2. Сенсорные нагрузки.
2.1. Длительность сосредоточенного наблюдения. Так как при нормальном режиме работы сосредоточенного наблюдения за процессом не требуется, то в среднем оператор тратит на него 26-50% от времени смены (класс 2).
2.2. Плотность сигналов (световых, звуковых) и сообщений в среднем за 1 ч работы. Информационными сигналами для оператора являются графики и таблицы изменения параметров. Плотность сигналов - более 300 в час (класс 3.2).
2.3. Число производственных объектов одновременного наблюдения. Для оператора объектами одновременного наблюдения служат дисплей, клавиатура и т. п., всего около 5-и объектов (класс 1).
2.4. Размер объекта различения в мм при длительности сосредоточенного внимания. Этот параметр соответствует классу 2 для оператора.
2.5. Работа с оптическими приборами (микроскоп, лупа и т. п.) при длительности сосредоточенного наблюдения. Так как операторская работа не предполагает работы с оптическими приборами, то отнесем ее к классу 1.
2.6. Наблюдение за экраном видеотерминала. Оператор наблюдает информацию в буквенно-цифровом виде 2-3 часа в смену, а в графическом виде 3-5 часов (класс 2).
2.7. Нагрузка на слуховой анализатор. В операторской разборчивость слов и сигналов составляет 70-90 %, слышимость на расстоянии до 3,5 м (класс 2).
2.8. Нагрузка на слуховой аппарат. Суммарное количество часов, наговариваемых оператором в неделю, невелико - до 16 (класс 1).
3. Эмоциональные нагрузки.
3.1. Степень ответственности за результат собственной деятельности, значимость ошибки. Оператор несет ответственность за функциональное качество конечной работы. Его ошибка может повлечь за собой повреждение оборудования, остановку ТП (класс 3.2).
3.2. Степень риска для собственной жизни. Если условия, в которых работает оператор, соответствуют нормам безопасности, то риск для жизни оператора исключен (класс 1).
3.3. Степень ответственности за безопасность других лиц. Так как оператор отвечает за ход ТП, то он ответственен за безопасность других лиц (класс 3.2).
4. Монотонность нагрузок.
4.1. Число элементов (приемов), необходимых для реализации простого задания или в многократно повторяющихся операциях. Оно колеблется в пределах 6-9 (класс 2).
4.2. Продолжительность выполнения простых производственных заданий или повторяющихся операций. Для оператора этот показатель составляет от 25 до 100 секунд (класс 2).
4.3. Время активных действий. Оператор реагирует на возникновение предаварийной ситуации, что случается редко, поэтому время активности оператора составляет 5-9% от времени смены (класс 3.1).
4.4. Монотонность производственной обстановки. Оператор пассивно наблюдает за процессом 81-90% времени смены (класс 3.1).
5. Режим работы.
5.1. Продолжительность рабочего дня. Для операторов она составляет 8 часов (класс 2).
5.2. Сменность работы. Операторы работают в 3 смены (класс 3.1).
5.3. Наличие регламентированных перерывов и их продолжительность. При правильной организации труда введение перерывов на отдых в счет рабочего времени способствует улучшению функционального состояния организма работника и обеспечивает высокую производительность его труда. Рекомендуемая длительность перерыва: от 7% рабочего времени (класс 1).
Таким образом, в результате анализа напряженности труда оператора ТП выявлено 5 показателей, отнесенных к классу 3.1 и 3 показателя, отнесенных к классу 3.2. В соответствии с этим, труд оператора ТП относится к 3-му «вредному» классу 1-ой степени напряженности. Первая степень третьего класса (3.1) - это условия труда, характеризующиеся такими отклонениями уровней вредных факторов от гигиенических нормативов, которые вызывают функциональные изменения, восстанавливающиеся, как правило, при более длительном (чем к началу следующей смены) прерывании контакта с вредными факторами и увеличивают риск повреждения здоровья. В связи с этим необходимо разработать мероприятия по компенсации либо устранению негативного влияния вредных факторов производства.
8.2 Санитарно-гигиенические требования к условиям труда операторов
Условия труда операторов ПЭВМ характеризуются возможностью воздействия на них комплекса факторов: шума, тепловыделений, вредных веществ, ионизирующих и неионизирующих излучений, специфических условий зрительной работы, параметров технологического оборудования и рабочего места.
Гигиенические требования к видеодисплейным терминалам, персональным электронно-вычислительным машинам и к организации работы с ними подробно изложены в СанПиН2.2.2.542-96. Приведем наиболее важные аспекты организации персонального места оператора, работающего за компьютером.
Высота рабочей поверхности стола оператора должна регулироваться в пределах 680-800 мм; при отсутствии такой возможности высота рабочей поверхности стола должна составлять 725 мм. Модульными размерами рабочей поверхности стола, на основании которых должны рассчитываться конструктивные размеры, следует считать: ширину 800, 1000, 1200 и 1400 мм, глубину 800 и 1000 мм при нерегулируемой его высоте, равной 725 мм. Рабочий стол должен иметь пространство для ног высотой не менее 600 мм, шириной - не менее 500 мм, глубиной на уровне колен - не менее 450 мм и на уровне вытянутых ног - не менее 650 мм. Рабочий стул (кресло) должен быть подъемно-поворотным и регулируемым по высоте и углам наклона сиденья и спинки, а так же - расстоянию спинки от переднего края сиденья. Конструкция его должна соответствовать нормам. Клавиатуру следует располагать на поверхности стола на расстоянии 100-300 мм от края, обращенного к пользователю или на специальной, регулируемой по высоте рабочей поверхности, отделенной от основной столешницы.
Конструкция, дизайн и совокупность эргономических параметров дисплея должны обеспечивать надежное и комфортное считывание отображаемой информации. Конструкция монитора должна обеспечивать возможность поворота корпуса в горизонтальной плоскости вокруг вертикальной оси в пределах ±30 градусов и в вертикальной плоскости вокруг горизонтальной оси в пределах ±30 градусов с фиксацией в заданном положении. Корпус монитора должен быть окрашен в спокойные мягкие тона с диффузным рассеиванием света. Корпус, клавиатура и другие блоки и устройства ПЭВМ должны иметь матовую поверхность одного цвета с коэффициентом отражения 0,4-0,6 и не иметь блестящих деталей, способных создавать блики. Конструкция дисплея должна предусматривать наличие ручек регулировки яркости и контраста. В целях защиты от электромагнитных и электростатических полей допускается применение приэкранных фильтров, специальных экранов и других средств индивидуальной защиты. Конструкция ПЭВМ должна обеспечивать мощность экспозиционной дозы рентгеновского излучения в любой точке на расстоянии 0,05 м от экрана при любых положениях регулировочных устройств, не превышающую 7,74x10 А/кг, что соответствует эквивалентной дозе, равной 0,1 мбэр/час (100 мкР/час).
Площадь на одно рабочее место должна составлять не менее 6,0 кв.м, а объем не менее 20,0 куб.м. Схемы размещения рабочих мест операторских должны учитывать расстояния между рабочими столами с видеомониторами, которое должно быть не менее 2,0 м, а расстояние между боковыми поверхностями видеомониторов - не менее 1,2 м.
Помещения с ПЭВМ должны иметь естественное и искусственное освещение. Естественное освещение должно осуществляться через светопроемы, ориентированные преимущественно на север и северо-восток и обеспечивать коэффициент естественной освещенности (КЕО) не ниже 1,2% в зонах с устойчивым снежным покровом и не ниже 1,5% на остальной территории. Искусственное освещение в помещениях эксплуатации ПЭВМ должно осуществляться системой общего равномерного освещения. Освещенность на поверхности стола в зоне размещения рабочего документа должна быть 300-500 лк.
Операторские не должны граничить с помещениями, в которых уровни шума и вибрации превышают нормируемые значения (механические цеха, мастерские, гимнастические залы и т.п.). В операторских уровень шума на рабочем месте не должен превышать 50 дБА. Шумящее оборудование (АЦПУ, принтеры и т.п.), уровни шума которого превышают нормированные, должно находиться вне помещения с ПЭВМ. Снизить уровень шума можно использованием звукопоглощающих материалов с максимальными коэффициентами звукопоглощения в области частот 63 - 8000 Гц для отделки помещений (разрешенных органами и учреждениями Госсанэпиднадзора России).
Помещения с ПЭВМ должны оборудоваться системами отопления, кондиционирования воздуха или эффективной приточно-вытяжной вентиляцией. Для внутренней отделки интерьера операторских должны использоваться диффузно-отражающие материалы с коэффициентом отражения для потолка - 0,7-0,8; для стен - 0,5-0,6; для пола - 0,3-0,5.
В операторских должны обеспечиваться оптимальные параметры микроклимата. Температура воздуха на рабочем месте в холодный период года должна быть от 22 до 24°С, и в теплый период года - от 23 до 25°С. Относительная влажность воздуха в операторской должна составлять 40 - 60%. Скорость движения воздуха должна быть 0,1 м/с. Содержание вредных химических веществ в производственных помещениях, работа на ПЭВМ в которых является основной, не должно превышать "Предельно допустимых концентраций загрязняющих веществ в атмосферном воздухе населенных мест".
Режим работы и продолжительность обеденного перерыва определяется действующим законодательством о труде. При 8-ми часовой рабочей смене оператора регламентированные перерывы следует устанавливать через 1,5-2,0 часа от начала рабочей смены и через 1,5-2 часа после обеденного перерыва продолжительностью 20 минут каждый или продолжительностью 15 минут через каждый час работы. Во время регламентированных перерывов с целью снижения нервно-эмоционального напряжения, утомления зрительного анализатора, устранения влияния гиподинамии и гипокинезии, предотвращения развития познотонического утомления целесообразно выполнять комплексы специальных упражнений. С целью уменьшения отрицательного влияния монотонии целесообразно измененять содержание работ.
Операторы должны проходить обязательные предварительные (при поступлении на работу) и периодические медицинские осмотры в порядке и в сроки, установленные Минздравмедпромом России и Госкомсанэпиднадзором России. К непосредственной работе с ПЭВМ допускаются лица, не имеющие медицинских противопоказаний.
8.3 Оценка возможности возникновения чрезвычайной ситуации
При проектировании любого объекта необходимо учесть его соответствие нормам безопасности, а также оценить возможность возникновения чрезвычайных ситуаций. Анализ появления негативных реакций системы в процессе ее эксплуатации удобно представить в виде так называемого «дерева отказов» [26].
Так как разработанный интерфейс предполагает его использование в реальных условиях функционирования системы, т.е., например, на нефтеналивном танкере, то возможным нежелательным событием связанным с работой оператора является возникновение аварии.
Построим «дерево отказов» (рис.35), в котором «Возникновение аварии» является головным событием. Для его предотвращения необходимо рассмотреть все возможные причины его появления.
Возникновение аварии подразумевает выход из строя оборудования, поэтому будем его рассматривать как событие, происходящее одновременно с одним из анализируемых ниже.
Взаимоисключающими событиями являются появление и отсутствие сообщения оператору о предаварийной ситуации. Предположим, оператор не получил сообщения. Причиной этого может стать обрыв канала связи между оператором и системой или отказ компьютера. Разберем подробнее причины отказа компьютера. Таковых существует несколько: отключение электроэнергии в операторской, скачок напряжения в сети; а также возможен случай, когда компьютер работает бесперебойно, но ввиду его загруженности (например, из-за большого количества одновременно работающих программ) не хватает оперативной памяти. Причины этой ветви «дерева отказов» исчерпаны, поэтому перейдем к следующей.
Допустим, сообщение дошло до оператора. К аварии в этом случае могут привести либо неправильные действия оператора, либо отсутствие его реакции вообще. Оператор мог нажать не на ту кнопку по сигналу тревоги, если: он неопытен, или низко квалифицирован (недостаток образования), или просто ошибся, причины чего разбирать не будем. Если оператор не отреагировал на сообщение о предаварийной ситуации, значит он по каким-то причинам находился вне операторской или был недостаточно внимательным в процессе работы. Причиной снижения бдительности оператора может быть утомление или нездоровье, а также внимание оператора могли отвлечь внешние раздражители.
Таким образом, мы подробно разобрали возможные причины возникновения аварии и пришли к следующим выводам. Для обеспечения нормальной работы системы необходимо:
• перед работой проверить состояние канала связи;
• обеспечить бесперебойную работу компьютера;
• запретить загружать одновременно несколько емких программ;
• производить тщательный отбор операторов;
• запретить оставлять монитор без присмотра;
• создать оптимальные условия труда оператора.
8.4 Экологичность проекта
Будем рассматривать экологичность проекта с позиции возникновения аварийной ситуации, которая может привести к затоплению судна и воздействие последствий аварии на окружающую среду.
По статистике нефтеналивные танкеры наиболее часто подвергаются воздействию пожаров, которые приводят к взрывам и, как следствие, затоплению судна. Пожароопасные ситуации чаще всего возникают на судах перевозящих легковоспламеняющиеся грузы. Это связано, во-первых, с несовершенством существующих систем диагностики состояния судна, во-вторых, с несвоевременным предупреждением персонала о возникновении пожара. На танкерах пожароопасные ситуации возникают преимущественно в танках, затем в машинном отделении и в последнюю очередь в жилых и подсобных помещениях. Как известно нефть содержит в своем составе огромное количество веществ. При вдыхании паров сырой нефти человеком может возникнуть раздражение верхних дыхательных путей. Одной из подсистем в системе пожаротушения является система инертных газов, закачиваемых в танки для уменьшения самовоспламенения. Инертные газы, также отрицательно могут влиять на окружающую среду, поэтому на танкерах осуществляется непрерывный контроль за давлением инертных газов в танках; ведется непрерывное слежение за возможными их утечками.
При сжигании нефтепродуктов возникает огромное количество неорганических продуктов сгорания, отрицательно влияющих на окружающую среду. За предупреждение процессов возгорания и горения в системе пожаротушения существует несколько подсистем, таких как: система пенотушения, система углекислотного тушения, система водотушения. При попадании тушащей пены в морскую воду происходит ее разложение на составляющие группы мыл, которые отрицательно влияют на флору и фауну. Для предупреждения растекания пены на судах в простенках между корпусами ставятся отстойно-очистительные цистерны.
Для предупреждения растекания нефтепродуктов в случае аварии судно выполняется с двумя корпусами, вложенными друг в друга. Также существует система распространения гранулированных компаундов поглощающих нефтепродукты, находящиеся на поверхности воды. Также нефтепродукты с поверхности собираются с помощью насосов, перекачивающих их в специальный отстойные танки, расположенные в носовой части корпуса судна.
При возникновении аварийной ситуации на пустом танкере, например идущем на погрузку, может возникнуть проблема растекания мазута по поверхности воды. Мазут как и нефть покрывает поверхность воды очень тонкой пленкой, единственной отличие состоит в том, что нефть по сравнению с мазутом более густая и поэтому мазут при растекании занимает большие площади. Методы борьбы с такого рода авариями точно такие же как и при растекании нефти – использование боновых заграждений, перекачка загрязненной воды в отстойные цистерны и танки, использование различных сорбентов поглощающих нефтепродукты.
Таким образом, при возникновении аварии на танкере возникает множество отрицательно влияющих на окружающую среду последствий. Данных последствий поможет избежать цифровая система диагностики защиты танкера от затопления, которая позволит оценивать ситуацию в реальном времени, предсказать пути ее распространения и задействовать основные механизмы системы для борьбы с аварией. Достоинством системы является также ее непрерывная работа и в моменты возникновения аварийной ситуации, что позволяет принимать верные решения для ее устранения.
9. СОЦИАЛЬНАЯ ЗНАЧИМОСТЬ РАБОТЫ
Проектируемая в дипломе система контроля состояния подсистем на нефтеналивном танкере типа "Победа" имеет огромную социальную значимость. Количество аварий происходящих на судах все еще велико. Это связано в первую очередь с несовершенством систем диагностики предаварийного состояния, во-вторых невозможностью существующих систем предсказывать ход развития аварийной ситуации. Из достоинств разрабатываемой системы можно выделить непрерывную диагностику состояния судна до и в момент аварии. Так как сигналы с датчиков централизовано сведены в рубку, это позволяет принимать своевременные и верные решения командным составом судна о проведении мероприятий по борьбе с возникшей чрезвычайной ситуацией. Реализация системы диагностики в цифровом виде с использованием модулей ADAM, позволяет быстро масштабировать и конфигурировать систему в соответствии с выдвигаемыми требованиями.
ЗАКЛЮЧЕНИЕ
Тенденция к дальнейшему сокращению численности обслуживающего персонала; необходимость ограничения потока информации до уровня, определяемого возможностями оператора к восприятию и переработке информации, а также к осуществлению воздействий; требования ограничения массогабаритных характеристик пультов управления, щитов и панелей, а также необходимость регистрировать изменение многих параметров подсистем — все это обусловило создание системы обработки и представления информации.
В данном дипломном проекте произведен анализ подсистем нефтеналивного танкера. В качестве контролируемых подсистем были выбраны: подсистема пожаротушения, подсистема кондиционирования и осушительно-балластная подсистема. Подсистема управления энергетическими установками рассмотрена не была, в силу ограничений накладываемых правилами морского регистра России.
Для выбранных подсистем были выделены основные принципы диагностики их состояния. Была предложена схема реализации соединений системы с помощью модулей ADAM. Использование данных технологий предоставляет огромные перспективы при реализации систем, так как позволяет переконфигурирвоать или перемасштабировать систему в короткие промежутки времени.
Использование SCADA-системы позволило организовать диспетчерский уровень с интуитивно понятным интерфейсом пользователя.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Александров А. В. Судовые системы. Л., «Судостроение», 1982.
2. Андреева О. А., Максимов В. И., Печковский B.C. Современные средства тушения судовых пожаров воздушно-механической пеной. Л., «Морской транспорт», 1989.
3. Ассоров Ф. Г., Пономарев И. М., Шпиков Б. И. Тушение пожаров на морских судах. М., «Морской транспорт», 1996.
4. Ассоров Ф. Г., Шпиков Б. И. Пожарная безопасность на морском транспорте. М., «Транспорт», 1995.
5. Бродский А. И. Физическая химия. Т. 1. М.—Л., Госхимиздат, 1978.
6. Буряк В. Д. О целесообразности применения систем паротушения на грузовых судах.— «Судостроение», 1994, № 5.
7. Волков Н. Н. Конструктивная противопожарная защита жилых помещений пассажирских судов.— «Судостроение», 1994, № 5.
8. Митькевич Г. П. Измерение прочности цены на связь. — «Прикладная химия», т. XXII, 1968.
9. Монахов В. Т. Справочные данные по горению, развитию и тушению пожаров. Высшая школа МООП РСФСР. М 1987.
10. Носов Н. С., Березин П. П. Противопожарная защита атомного ледокола «Ленин».— «Судостроение», 1974, №8.
11. Нэш П., Эштон Л. Борьба с пожарами и предотвращение их на судах. Пер. с англ.— «Мировое судостроение и флот», 1993, № 6.
12. Плоткин М., Сурикова А. Тушение пожаров (нефтепродуктов) тонкораспыленной водой.— «Морской флот», 1994, № 2.
13. Пономарев И. М. Пожарная профилактика на морском транспорте. М., «Морской транспорт», 1984.
14. Пономарев И. М. Система пенотушения на танкерах.— «Судостроение», 1998, № 12.
15. Рабинерсон А. А. Расчет теплоизоляции судовых противопожарных ограждений.— В сб. «Технология судостроения», 1979, № 6.
16. Ройтман М. Я. Основы противопожарного нормирования в строительстве. М., Стройиздат, 1986.
17. Рябов И. В. Современные средства тушения пожаров пенами. М., Изд. МКХ РСФСР, 1987.
18. Смольников С. Пожар на танкере.— «Пожарное дело», 1969.
19. www.asutp.ru
20. www.advantech.ru
21. www.adastra.ru
22. Т.Н. Бакаева, А.В. Непомнящий, И.И. Ткачев. В помощь дипломнику: Методическая разработка к разделу "Безопасность и экологичность" в дипломном проекте (работе) для студентов всех специальностей. Таганрог: Изд-во ТРТУ, 2001.
23. Т.А. Пьявченко. Автоматизированные системы управления технологическими процессами и техническими объектами: Учебное пособие. Таганрог: ТРТУ, 1997.
ПРИЛОЖЕНИЯ
Приложение 1
Листинг MatLab-программы для моделирования сигналов с датчиков.
F = 500;
Ngroup = 21;
Nvar =9;
mox = 21;
sigma = sqrt( 0.01 * (9+5)^2 );
Apom = 20*mox;
Akz = 25*mox;
Aobr = 0;
x = mox + sigma*randn(1, F);
D0 = cov(x);
subplot(5, 1, 1)
plot(x)
grid on
ylim([mox-sigma*10 mox+sigma*10])
text(1, mox-sigma*10+1, strcat('Дисперсия погрешности измерений:', num2str(D0)))
legend('Сигнал датчика');
pomnum = F/50; %кол-во импульсных помех с амплитудой Apom
for m = 1:pomnum
t = round(3 + (F-3) * rand(1)); %индекс элемента массива, где будет помеха. Лежит в интервале [3;F];
x(t) = Apom;
end
t = round(3 + (F-5) * rand(1)); %индекс элемента массива, где будет короткое замыкание. Лежит в интервале [3;F-2];
x(t) = Akz;
x(t+1) = Akz;
x(t+2) = Akz;
t = round(3 + (F-5) * rand(1)); %индекс элемента массива, где будет обрыв. Лежит в интервале [3;F-2];
x(t) = Aobr;
x(t+1) = Aobr;
x(t+2) = Aobr;
%D1 = cov(x);
subplot(5, 1, 2)
plot(x)
grid on
ylim([mox-sigma*10 mox+sigma*10])
legend('Сигнал в канале измерений');
%проверка на достоверность
errorcount = 0; %счетчик нарушений
j = 3;
XB = mox + (Nvar+2);
XH = mox - (Nvar+2);
last = x(1); %последнее достоверное значение
for k = j:F
if x(k)<XH | x(k)>XB
errorcount = errorcount + 1;
if errorcount == 3
razn = x(k)-x(k-j);
if razn < 0
obr = k;
else
kz = k;
end
errorcount = 0; %так как программа продолжает выполнение
x(k)=last;
else
x(k) = last;
end
else
errorcount = 0;
last = x(k);
end
end
D2 = cov(x);
subplot(5, 1, 3)
plot(x)
grid on
ylim([mox-sigma*10 mox+sigma*10])
text(1, mox-sigma*10+1, strcat('Дисперсия:', num2str(D2), '; КЗ на отсчете:', int2str(kz), '; Обрыв в канале на отсчете:', int2str(obr)))
legend('Сигнал после проверки на достоверность');
% Algoritmi sglajivaniya
Nzad = 10;
sigmazad = 0.00001;
% Sglajivaniye "skolzashego srednego"
M = ceil(Nzad);
for t = 1:M
xc(t) = x(t);
end
for k = M:F
sum = 0;
for j = k-M+1:k-M+M
sum = sum + x(j);
end
sum = sum / M;
xc(k) = sum;
end
xcd = xc(M:F);
D3 = cov(xcd);
subplot(5, 1, 4)
plot(xc)
grid on
ylim([mox-sigma*10 mox+sigma*10])
text(1, mox-sigma*10+1, strcat('Дисперсия:', num2str(D3), '; Коэфф. ослабления :', num2str(D2/D3), '; Тск.ср.=', int2str(M), '*Tопр'))
legend('Скользящее сглаживание');
% Exponencialnoye sglajivaniye
alpha = 2/(Nzad+1);
xe(1)=alpha*x(1);
for k = 2:F
xe(k) = xe(k-1) + alpha*(x(k)-xe(k-1));
end
Teks = 0.5*log(sigmazad)/log(1-alpha);
xed = xe(ceil(Teks):F);
D4 = cov(xed);
subplot(5, 1, 5)
plot(xe)
grid on
ylim([mox-sigma*10 mox+sigma*10])
text(1, mox-sigma*10+1, strcat('Дисперсия:', num2str(D4), '; Коэфф. ослабления :', num2str(D2/D4), '; Тэкс.сгл.=', num2str(Teks), '*Tопр'))
legend('Экспоненциальное сглаживание');
Программный модуль для реализации функции аналогового ввода сигналов от датчиков.
//измерение температуры
begin
open "com1: 9600, n, 8, 1, rs, cs, cd, ds" as #1;
writeln "конфигурация, ждите";
cmd: = "%01020е0600";
writeln #1,cmd;
result:=input(4,#1);
temp:=mid(result,1,3);
if temp<>"102" then goto ent;
delay = 7 goto dela;
vver:
cmd:= "@02lo+140.00";
writeln #1,cmd;
results:=inputs (4, #1);
temps:= mto(result,1,3);
if tempo"102" then goto vver;
delay:= 2 goto dela;
cmd:= "@02еам";
vver2:
writeln #1,cmd;
results:=inputs (4, #1);
temp:= mid(temp,1,3);
if temp<>"102" then goto vver2
delay = 2: goto dela
writeln " температура: °";
writeln " *контрольная температура:";
writeln " * сигнал управления:";
writeln " текущее время:";
while true do
begin
cmd:= "#02";
writeln #1,cmd;
temps;= inputs (9, #1);
temps:= mid(temp,2,7);
writeln temps;
writeln times;
cmos:= "@02d1";
writeln #1,cmd;
alarms:= inputs (9, #1);
alarms:= mid( alarm,6,1);
if (alarms ="2" or alarms ="3") then writeln "on"
else writeln "off";
end;
dela:
//"процедура временной задержки"
begin
start:= int(timer)
while delay>-1 do
begin
if (startoint(timer)) then delay = delay-1
end;
end;
end;
Приложение 2
Вместимость танков и цистерн нефтеналивного танкера
| Группа танков, цистерны
|
№ танков и цистерн
|
Вместимость(нетто) м3
|
| Грузовые танки
|
Отстойные танки
|
Балластные цистерны
|
общая
|
| 1 группа
|
1ПрБ,1ЛБ,5ПрБ 5ЛБ
|
4155,4010,
5460,5315
|
18940
|
| 2 группа
|
2ПрБ, 2ЛБ, 6ПрБ, 2ЛБ
|
5460,5315, 5460, 5315
|
21550
|
| 3 группа
|
3ПрБ, 3ЛБ 7ПрБ, 7ЛБ
|
5460,5315 3800, 3700
|
18275
|
| 4 группа
|
4ПрБ, 4ЛБ 8ПрБ, 8ЛБ
|
5460,5315
|
870,705
|
12350
|
| 1-4 группа
|
71100
|
| Балластные цистерны
|
Б-1,Б-2,Б-3, Б-4 ,Б-5, Б-6, Б-7, Б-8, Б-9, Б10
|
2*3110 2*1525 2*3050 2*1525 2*1330
|
6220
3050
6100
3050
2660
|
| Форпик Ахтерпик
|
1635
535
|
1635
535
|
| Балластные цистерны и пики
|
23250
|
Приложение 3
 Принципиальная схема системы. Принципиальная схема системы.
Приложение 4
Функциональная схема системы.
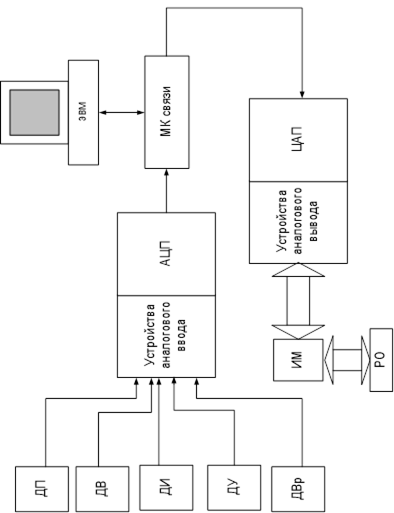
|
