Содержание:
1. Система линейных уравнений. Определитель решения системы. Исследование линейной системы 2-ух уравнений с 2-мя неизвестными.
2. Определитель квадратной матрицы второго порядка. Формулы Крамера.
3. Определитель третьего порядка. Алгебраические дополнения, теорема о разложении определителя третьего порядка.
4. Матричное решение системы уравнений.
5. Исследование систем линейных уравнений. Метод Гаусса.
6. Комплексные числа (определение). Мнимая единица. Форма записи.
7. Операции с комплексными числами (определение, свойства).
8. Геометрический смысл операций с комплексными числами.
9. Извлечение корня из комплексного числа.
10. Геометрическое изображение комплексного числа. Модуль и аргумент комплексного числа. Формула Муавра.
11. Основная теорема алгебры.
12. Прямоугольные координаты на плоскости. Расстояние между двумя точками плоскости.
13. Прямоугольные координаты на плоскости. Деление отрезка в данном отношении.
14. Прямоугольные координаты на плоскости. Уравнение окружности, уравнение эллипса.
15. Прямоугольные декартовы координаты в пространстве. Уравнение плоскости.
16. Элементы аналитической геометрии в пространстве. Уравнение плоскости.
17. Элементы аналитической геометрии в пространстве. Уравнение прямой.
18. Угол между плоскостями, расстояние от точки до плоскости.
19. Полярные координаты. Связь между прямоугольными и полярными координатами.
20. Понятие вектора. Линейные операции над векторами. Свойства.
21. Угол между двумя векторами. Проекция вектора на ось.
22. Линейная зависимость векторов.
23. Базис на плоскости и в пространстве. Аффинные координаты.
24. Направляющие косинусы
25.Скалярное произведение векторов.
26. Векторное произведение векторов.
27.Смешанное произведение векторов.
28. Функция одной переменной, график, способы задания.
29. Параметрический способ задания функции. Параметрическое уравнение окружности, эллипса.
30. Понятие сложной и обратной функции.
31. Четные, нечетные, периодические функции.
32. Классификация функций. Основные элементарные функции.
33. Числовые последовательности и пределы.
34. Бесконечно малая и бесконечно большая величина.
35. Предел функции на бесконечности.
Реклама

36. Предел функции в точке.
37. Основные теоремы о пределах.
38. Бесконечно малые и бесконечно большие функции. Свойства бесконечно малых и их связь с бесконечно большими.
39. Вычисление некоторых пределов. Раскрытие неопределенностей
40. Первый замечательный предел.
41. Второй замечательный предел.
1. Система линейных уравнений. Определение решения линейной системы. Исследование линейной системы 2-х уравн. С 2-мя неизв.
Рассмотрим сист. 2-х уравн. С 2-мя неизв.
ì
ía11
x1
+a1
2x2
=b1
î a21
x1
+a22
x2
=b2
Введем обозначение:
D=½a11
a12
½
½a21
a22
½
Dx1
=½b1
a12
½
½b2
a22
½
Dx2
=½a11
b1
½
½a21
b2
½
D-это определитель, составленный из коэффициентов, стоящих перед неизв.
Определители Dx1
и Dx2
составл.из опред. D заменой столбца коэффициентов при соотв. перем. На столбец своб. Членов b1
и b2
. Для нахождения неизв. x1
и x2
необх. Воспольз. Формулой:
x1=
Dx1
/D; x2
=Dx2
/D.
Итак, если D отличен от нуля, то система имеет единственное решение, опред. По данным фомулам, если D=0, то сист. Может иметь множ. Реш. Или их совсем не иметь.
Система m уравнений с n неизвестными в общем виде записывается следующим образом: 
где aij
– коэффициенты, а bi
– постоянные.
Решениями системы являются n чисел, которые при подстановке в систему превращают каждое ее уравнение в тождество
система имеет хотя бы одно решение, то она называется совместной
. Если система не имеет ни одного решения, то она называется несовместной
.
Система называется определенной
, если она имеет только одно решение и неопределенной
, если более одного.
2. Определитель квадратной матрицы 2-го порядка. Формулы Крамера.
Любые 4 числа, расположенные в виде квадратной таблицы, называются квадратной матрицей второго порядка. Каждой квадратной матрице 2-ого порядка можно поставить в соответствие число, называемое её определителем и обозначаемое D=|A|.
Определитель матр. 2-го порядка равен числу
a11
·a22
-a21
·a12
Св
-
ва
опред
.
2-го порядка
:
1. опред. Не измен. Если его строки поменять местами с соотв. столбцами
2. при перестановки 2-х строк(или столбцов) опред. Изменит знак на противоп.
3. опред. С двумя одинак. Строками или столб. Равен нулю
4. общий множит. Всех элем. Строки или столбца можно выносить за знак опред.
5. если все элем. Какой-л. строки(ст.) равны нулю, то опред. Равен нулю
Реклама

6. если к элем. К-л. строки или столб. Опред. Приб. В соотв. элем. Др. строки или ст., умножен. На одно и то же число, то опред не изм.
7. опред. Равен алгебр. Сумме произв. Элем. К.-л. строки (ст) на их алгебр. Доп.
Теорема Крамера
Данный метод также применим только в случае систем линейных уравнений, где число переменных совпадает с числом уравнений. Кроме того, необходимо ввести ограничения на коэффициенты системы. Необходимо, чтобы все уравнения были линейно независимы, т.е. ни одно уравнение не являлось бы линейной комбинацией остальных.Для этого необходимо, чтобы определитель матрицы системы не равнялся 0.
Система из n уравнений с n неизвестнымив случае, если определитель матрицы системы не равен нулю, имеет единственное решение и это решение находится по формулам:xi
= Di
/D, где D = опред. Матр., а Di
– определитель матрицы, получаемой из матрицы системы заменой столбца i столбцом свободных членов
Если система однородна, т.е. bi
= 0, то при D¹0 система имеет единственное нулевое решение x1
= x2
= … = xn
= 0.При D = 0 система имеет бесконечное множество решений.
3. Определитель 3-го порядка. Алгебраические дополнения, теорема о разложении определителя третьего порядка.
9 элементов aij
, где i-номер строка, а j-номер столбца, располагаются в квадратную таблицу, называемую квадратной матрицей третьего порядка. Ей можно поставить в соответствие число, которое называется определителем 3-го порядка.
Опред. Равен алгебр. Сумме произв. Элем. К.-л. строки (ст.) на их алгебр. Доп.
Алгебраическое дополнение Aij для элемента
aij
– число равное
(-1) i
+
j
Mij, где Mijминор элемента aij
.
Минор Mij элемента Aij матрицы А
наз-ся определитель, полученный из исходного определителя А вычеркиванием итой строки и житого столбца.
4. Матричное решение системы уравнений
Рассмотрим систему n линейных уравнений с n неизвестными.
Рассмотрим 3 матрицы, связанный одной системой
 Матрица А составленная из коэф. Принеизв. Матрица А составленная из коэф. Принеизв.
  a11
a12
… a1n a11
a12
… a1n
A = a21
a22
… a2
n
an
1
an
2
… ann
Заметим, что левую часть системы можно
Получить как произведение матриц
Используя понятия равенства
матриц, систему моно
А· x = запис. В виде А*х=В (1)
Уравнение (1) называют
Матричным уравнением, если
Определитель матрицы А отл.
От нуля, то сущ. Матр. А-1
Обратная от матрицы А.
Умножим обе части уравн.(1)
Слева на А-1
получим:
А-1
*А*х=А-1
*В;А-1
*А*х=Е.
Е*х= А-1
*В; Е*х=х
Х= А-1
*В
Если матричное уравнение имеет вид х*А=В, то его решение можно легко найти по форм. Х= А-1
*В
6. Комплексные числа. Мнимая единица. Форма записи
 Комплексным числом
z
называется выражение Комплексным числом
z
называется выражение  , где a
и b
– действительные числа, i
– мнимая единица, которая определяется соотношением: , где a
и b
– действительные числа, i
– мнимая единица, которая определяется соотношением: При этом число a
называется действительной частью
числа z
(a
=
Re
z
), а b
- мнимой частью
(b
=
Im
z
).Если a
=
Re
z
=0,
то число z
будет чисто мнимым, если b
=
Im
z
= 0
, то число z
будет действительным. При этом число a
называется действительной частью
числа z
(a
=
Re
z
), а b
- мнимой частью
(b
=
Im
z
).Если a
=
Re
z
=0,
то число z
будет чисто мнимым, если b
=
Im
z
= 0
, то число z
будет действительным.
Числа  и и  называются комплексно – сопряженными. называются комплексно – сопряженными.
Два комплексных числа  и и  называются равными, если соответственно равны их действительные и мнимые части: называются равными, если соответственно равны их действительные и мнимые части:
Комплексное число равно нулю, если соответственно равны нулю действительная и мнимая части. Понятие комплексного числа имеет геометрическое истолкование. Множество комплексных чисел является расширением множества действительных чисел за счет включения множества мнимых чисел. Комплексные числа включают в себя все множества чисел, которые изучались ранее. Так натуральные, целые, рациональные, иррациональные, действительные числа являются, вообще говоря, частными случаями комплексных чисел.Если любое действительное число может быть геометрически представлено в виде точки на числовой прямой, то комплексное число представляется точкой на плоскости, координатами которой будут соответственно действительная и мнимая части комплексного числа. При этом горизонтальная ось будет являться действительной числовой осью, а вертикальная - мнимой осью. A(a,b) Понятие комплексного числа имеет геометрическое истолкование. Множество комплексных чисел является расширением множества действительных чисел за счет включения множества мнимых чисел. Комплексные числа включают в себя все множества чисел, которые изучались ранее. Так натуральные, целые, рациональные, иррациональные, действительные числа являются, вообще говоря, частными случаями комплексных чисел.Если любое действительное число может быть геометрически представлено в виде точки на числовой прямой, то комплексное число представляется точкой на плоскости, координатами которой будут соответственно действительная и мнимая части комплексного числа. При этом горизонтальная ось будет являться действительной числовой осью, а вертикальная - мнимой осью. A(a,b)
B
a
Таким образом, на оси ОХ располагаются действительные числа, а на оси ОY – чисто мнимые.С помощью подобного геометрического представления можно представлять числа в так называемой тригонометрической форме.
5 Исследование систем линейных уравнений. Метод Гаусса
Рассмотрим систему линейных уравнений, в к-й число уравн. Неравно числу содерж. Перем.
,
где aij
– коэффициенты, а bi
– постоянные. Решениями системы являются n чисел, которые при подстановке в систему превращают каждое ее уравнение в тождество.
Если система имеет хотя бы одно решение, то она называется совместной
.
Если система не имеет ни одного решения, то она называется несовместной
.
Система называется определенной
, если она имеет только одно решение и неопределенной
, если более одного.
Отметим преобразования, к-е переводят систему уравнений в равносильную ей:
1. перемена местами 2-х любых уравнений
2. умножение обеих частей любого уравнения на произв. Число отличное от нуля
3.прибавление к одному Ур. Др., умнож. На любое число отличное от нуля
В рузультате таких преобр., называемы елемент. Получ. Сист, имеющ.такое же реш., что и первонач.
Для исслед. Сист. Общ вида удобно исп. Метод Гаусса
В отличие от матричного метода
и метода Крамера
, метод Гаусса может быть применен к системам линейных уравнений с произвольным числом уравнений и неизвестных. Суть метода заключается в последовательном исключении неизвестных.Рассмотрим систему линейных уравнений:
Разделим обе части 1–го уравнения на a11
¹ 0, затем:1) умножим на а21
и вычтем из второго уравнения; 2) умножим на а31
и вычтем из третьего уравнения и т.д.Получим: , где d
1
j
= 1
j
/
a
11
,
j
= 2, 3, …,
n
+1
dij
=
aij
–
ai
1
d
1
j
i
= 2, 3, … ,
n
;
j
= 2, 3, … ,
n
+1.
Далее повторяем эти же действия для второго уравнения системы, потом – для третьего и т.д.Пример.
Решить систему линейных уравнений методом Гаусса. , где d
1
j
= 1
j
/
a
11
,
j
= 2, 3, …,
n
+1
dij
=
aij
–
ai
1
d
1
j
i
= 2, 3, … ,
n
;
j
= 2, 3, … ,
n
+1.
Далее повторяем эти же действия для второго уравнения системы, потом – для третьего и т.д.Пример.
Решить систему линейных уравнений методом Гаусса. Составим расширенную матрицу системы.* = Составим расширенную матрицу системы.* =  Таким образом, исходная система может быть представлена в виде: Таким образом, исходная система может быть представлена в виде: , откуда получаем: x3
= 2; x2
= 5; x1
= 1.Пример.
Решить систему методом Гаусса. , откуда получаем: x3
= 2; x2
= 5; x1
= 1.Пример.
Решить систему методом Гаусса. Составим расширенную матрицу системы. Составим расширенную матрицу системы.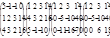 Таким образом, исходная система может быть представлена в виде: Таким образом, исходная система может быть представлена в виде: , откуда получаем: z = 3; y = 2; x = 1.Полученный ответ совпадает с ответом, полученным для данной системы методом Крамера и матричным методом.Для самостоятельного решения: , откуда получаем: z = 3; y = 2; x = 1.Полученный ответ совпадает с ответом, полученным для данной системы методом Крамера и матричным методом.Для самостоятельного решения: Ответ: {1, 2, 3, 4}. Ответ: {1, 2, 3, 4}.
7. Операции с комплексными числами
Основные действия с комплексными числами вытекают из действий с многочленами.1) Сложение и вычитание.
 ; ; ;2) Умножение. ;2) Умножение.

 В тригонометрической форме: В тригонометрической форме: , , 
 С случае комплексно – сопряженных чисел: С случае комплексно – сопряженных чисел:
3) Деление.
   В тригонометрической форме: В тригонометрической форме: 4) Возведение в степень.
Из операции умножения комплексных чисел следует, что 4) Возведение в степень.
Из операции умножения комплексных чисел следует, что
 В общем случае получим: В общем случае получим: ,где n
–
целое положительное число. Это выражение называется формулой Муавра.
(Абрахам де Муавр (1667 – 1754) – английский математик)Формулу Муавра можно использовать для нахождения тригонометрических функций двойного, тройного и т.д. углов.Пример.
Найти формулы sin2j и cos2j.Рассмотрим некоторое комплексное число ,где n
–
целое положительное число. Это выражение называется формулой Муавра.
(Абрахам де Муавр (1667 – 1754) – английский математик)Формулу Муавра можно использовать для нахождения тригонометрических функций двойного, тройного и т.д. углов.Пример.
Найти формулы sin2j и cos2j.Рассмотрим некоторое комплексное число  Тогда с одной стороны Тогда с одной стороны  .По формуле Муавра: .По формуле Муавра: 
Приравнивая, получим  Т.к. два комплексных числа равны, если равны их действительные и мнимые части, то Т.к. два комплексных числа равны, если равны их действительные и мнимые части, то
  Получили известные формулы двойного угла.5) Извлечение корня из комплексного числа. Получили известные формулы двойного угла.5) Извлечение корня из комплексного числа.
 Возводя в степень, получим: Возводя в степень, получим:
Отсюда:  
Таким образом, корень n
– ой степени из комплексного числа имеет n
различных значений.
20. Вектор. Линейные операции над векторами
Вектором
называется направленный отрезок в пространстве, имеющий опред длину.
К векторам относится также и нулевой
вектор, начало и конец которого совпадают.
Единичный-
длина к-го равна 1. напр. Может быть какое угодно.
Длиной (модулем)
вектора называется расстояние между началом и концом вектора.
Векторы называются коллинеарными
, если они расположены на одной или параллельных прямых. Нулевой вектор коллинеарен любому вектору.
Векторы называются компланарными
, если существует плоскость, которой они параллельны. Коллинеарные векторы всегда компланарны, но не все компланарные векторы коллинеарны.
Векторы называются равными
, если они коллинеарны, одинаково направлены и имеют одинаковые модули.Всякие векторы можно привести к общему началу, т.е. построить векторы, соответственно равные данным и имеющие общее начало. Из определения равенства векторов следует, что любой вектор имеет бесконечно много векторов, равных ему.
Линейными операциями
над векторами называется сложение и умножение на число. Суммой векторов является вектор -  Произведение - Произведение - , при этом , при этом  коллинеарен коллинеарен  .Вектор .Вектор  сонаправлен с вектором сонаправлен с вектором  ( ), если a > 0.Вектор ( ), если a > 0.Вектор  противоположно направлен с вектором (¯), если a < 0.Линейные
операции над векторами в координатах.
Пусть заданы векторы в прямоугольной системе координат противоположно направлен с вектором (¯), если a < 0.Линейные
операции над векторами в координатах.
Пусть заданы векторы в прямоугольной системе координат тогда тогда
25 Скалярное произведение векторов, его св-ва и вычисления.
Скалярным произведением
векторов  и и  называется число, равное произведению длин этих сторон на косинус угла между ними.× называется число, равное произведению длин этих сторон на косинус угла между ними.× = ï = ï ïï ïï ïcosj ïcosj
Свойства
скалярного произведения:× = ïï2
; × × = 0, если ^ или = 0 или = 0. = 0, если ^ или = 0 или = 0. × × = ×;×( = ×;×( + + ) = ×+ × ) = ×+ × ;(m)× = ×(m) = m(×);Если рассматривать векторы ;(m)× = ×(m) = m(×);Если рассматривать векторы  в декартовой прямоугольной системе координат, то в декартовой прямоугольной системе координат, то × × = xa
xb
+
ya
yb
+
za
zb
;
Используя полученные равенства, получаем формулу для вычисления угла между векторами: = xa
xb
+
ya
yb
+
za
zb
;
Используя полученные равенства, получаем формулу для вычисления угла между векторами: ;Пример.
Найти (5 + 3)(2 - ;Пример.
Найти (5 + 3)(2 -  ), если ), если  10×- 5 10×- 5 ×+ 6×- 3× = 10 ×+ 6×- 3× = 10 , т.к. , т.к. . .
40. Первый замечательный предел
 Доказательство: докажем для Доказательство: докажем для  справедливость неравенства справедливость неравенства 
В силу четности входящих в неравенство ф-ий, докажем это неравенство на промежутке Из рисунка видно, что площадь кругового сектора Из рисунка видно, что площадь кругового сектора

 , так как х
>0, то , так как х
>0, то  , ,
 2. следовательно, что 2. следовательно, что 
1. Покажем, что  
2. Докажем, что 

3. Последнее утверждение:

26.Векторное произведение векторов. Свойства.
Векторным произведением
векторов и  называется вектор называется вектор  , удовлетворяющий следующим условиям:1) , удовлетворяющий следующим условиям:1)  , где j - угол между векторами и , , где j - угол между векторами и ,  2) вектор 2) вектор  ортогонален векторам и ортогонален векторам и 
 3) , и образуют правую тройку векторов.Обозначается: 3) , и образуют правую тройку векторов.Обозначается:  или или . .


j
Свойства векторного произведения векторов:
1)  ;2) ;2)  , если , если  ïï или = 0 или = 0;3) (m ïï или = 0 или = 0;3) (m )´ )´ = ´(m) = m(´);4) ´(+ = ´(m) = m(´);4) ´(+  ) = ´+ ´;5) Если заданы векторы (
xa
,
ya
,
za
)
и ) = ´+ ´;5) Если заданы векторы (
xa
,
ya
,
za
)
и  (
xb
,
yb
,
zb
)
в декартовой прямоугольной системе координат с единичными векторами (
xb
,
yb
,
zb
)
в декартовой прямоугольной системе координат с единичными векторами  , то´= , то´= 6) Геометрическим смыслом векторного произведения векторов является площадь параллелограмма, построенного на векторах и .Пример.
Найти векторное произведение векторов 6) Геометрическим смыслом векторного произведения векторов является площадь параллелограмма, построенного на векторах и .Пример.
Найти векторное произведение векторов  и и  . = (2, 5, 1); = (1, 2, -3) . = (2, 5, 1); = (1, 2, -3) . .
37. Основные теоремы о пределах
Теорема 1.
 , где С = const.Следующие теоремы справедливы при предположении, что функции f(x) и g(x) имеют конечные пределы при х®а. , где С = const.Следующие теоремы справедливы при предположении, что функции f(x) и g(x) имеют конечные пределы при х®а.
Теорема 2.
 Доказательство этой теоремы будет приведено ниже. Доказательство этой теоремы будет приведено ниже.
Теорема 3.

Следствие.

Теорема 4.
 при при 
Теорема 5.
Если
f
(
x
)>0 вблизи точки х = а и  , то А>0.
Аналогично определяется знак предела при f(x) < 0, f(x) ³ 0, f(x) £ 0. , то А>0.
Аналогично определяется знак предела при f(x) < 0, f(x) ³ 0, f(x) £ 0.
Теорема 6.
Если
g
(
x
)
£
f
(
x
)
£
u
(
x
) вблизи точки х = а и  , то и , то и  . .
Функция f(x) называется ограниченной
вблизи точки х = а, если существует такое число М>0, что ïf(x)ï<M вблизи точки х = а.
Теорема 7.
Если функция
f
(
x
) имеет конечный предел при х
®
а, то она ограничена вблизи точки х = а.
Доказательство.
Пусть  , т.е. , т.е.  , тогда , тогда
 или или , .е. , .е. где М = e + ïАïТеорема доказана. где М = e + ïАïТеорема доказана.
41. Второй замечательный предел
Это форма второго замечательного предела, справедлива и для действ. аргумента
lim(n®¥)(1+1/n)n
=e
27. Смешенное произведение векторов его св-ва и вычисления.
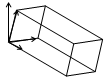
Смешанным произведением
векторов  , и , и  называется число, равное скалярному произведению вектора на вектор, равный векторному произведению векторов и называется число, равное скалярному произведению вектора на вектор, равный векторному произведению векторов и  .Обозначается .Обозначается  или (, , или (, , ). Смешанное произведение ). Смешанное произведение  по модулю равно объему параллелепипеда, построенного на векторах по модулю равно объему параллелепипеда, построенного на векторах  , и . , и .


Свойствасмешанного произведения:
1)Смешанное произведение равно нулю, если: а)хоть один из векторов равен нулю;б)два из векторов коллинеарны;в)векторы компланарны.
2) 3) 3)
4) 5) Объем треугольной пирамиды, образованной векторами , 5) Объем треугольной пирамиды, образованной векторами ,  и , равен и , равен 6)Если 6)Если  , ,  , то , то Пример. Доказать, что точки А(5; 7; 2), B(3; 1; -1), C(9; 4; -4), D(1; 5; 0) лежат в одной плоскости.Найдем координаты векторов: Пример. Доказать, что точки А(5; 7; 2), B(3; 1; -1), C(9; 4; -4), D(1; 5; 0) лежат в одной плоскости.Найдем координаты векторов:  Найдем смешанное произведение полученных векторов: Найдем смешанное произведение полученных векторов: ,Таким образом, полученные выше векторы компланарны, следовательно точки A, B, C и D лежат в одной плоскости.Пример. Найти объем пирамиды и длину высоты, опущенной на грань BCD, если вершины имеют координаты A(0; 0; 1), B(2; 3; 5), C(6; 2; 3), D(3; 7; 2).Найдем координаты векторов: ,Таким образом, полученные выше векторы компланарны, следовательно точки A, B, C и D лежат в одной плоскости.Пример. Найти объем пирамиды и длину высоты, опущенной на грань BCD, если вершины имеют координаты A(0; 0; 1), B(2; 3; 5), C(6; 2; 3), D(3; 7; 2).Найдем координаты векторов:  Объем пирамиды Объем пирамиды
Для нахождения длины высоты пирамиды найдем сначала площадь основания CD.  
Sосн
=  (ед2
)Т.к. V = (ед2
)Т.к. V =  ; (ед) ; (ед)
22. Линейной зависимость векторов
Вектор а1,а2,…аn наз-ся линейнозависимым
, если сущ. Числа l1, l2,… ln не все равные нулю, для к-х справедливо равенство:
l1а1+lа2+…lnаn=0.
Если векторы линейнозависимы, то один из них можно представить виде линейной комбинации остальных.
Справедливо и обратное утверждение.
Векторы а1,а2,…аn наз-ся линейнонезавис
., если l1а1+lа2+…lnаn=0.
Имеет место только при условии l1=l2=…=ln=0.
Теорема:
Всякие 3 вектора а,b и с на пл. ленейнозависимы
Следствие:
если число векторов на пл. больше 3-х, то они всегда линейнозависимы
Теорема:
2 вектора на пл. линейноз.Û когда они неколлинеарны.
Теорема:
всякие 4 вектора а,b,с и d в простр. линейнозависимы.
Следствие:
1.
если число данных веторов в простр. больше 4-х, то они линейноз.
2.
для того, чтобы 3 вектора в простр. были компланарны, необх. И дост., чтобы они были линейноз. и наоборот.
3.
для того, чтобы 3 вектора были линейно независимы необх. и дост., чтобы они были компланарны
23. Базис на пл. и в простр. Аффинные координаты
Базис
- совокупн. линейнонезавис. векторов
Базис на плоскости
– два любые неколлинеарные вектора, взятые в определенном порядке.
Базис в пространстве
– три любые некомпланарных вектора, взятые в определенном порядке.
Пусть произв. Вектора a,b и c на пл. образуют базисÞ
a= l1
b+l2
c(1) Это выражение называют разложением вектора а по базису b и c, а числа l1
,l2
наз-ся аффинными координатами вектора а и запис-ся: а={l1
,l2
}=(l1
,l2
) и такое разложение явл-ся единтсвенным. Аналогично, любой вектор а в пространстве однозначно разлагается по векторам b,c и d. а= l1
b+l2
c + l3
d, а= (l1
,l2
,l3
).
Прямоугольный декартов Базис
Т.к. они не компланарны, то они образуют базис, к-й называется декартовым.
Если известны декартовы координаты векторов, то линейные операции над векторами можно заменить арифм. действ. над их проекциями.
Если даны координаты точек А(х1,y1,z1) и B(x2,y2,z2, то проекции вектора
АВ на оси будут равны
прox
AB=x2-x1; прoy
AB=y2-y1; прo
z
AB=z2-z1,т.е. разложение вектора АВ по Базису:
АВ=( x2-x1)i +( y2-y1)j + (z2-z1)k
½AB½=Ö( x2-x1)2
+( y2-y1)2
+ (z2-z1)2
24. Направляющие косинусы
вектора
а – косинусы углов между вектором и осями координат и равны отношению прилегающего катета к гипотенузе, т.е. отношению координат вектора к его модулю.
Пусть вектор а разложен по Базису след обр.:
а= axi
+ayj
+azk
ax
=½a½*cosa; ay
=½a½*cosb; az
=½a½*coscÞ cosa= ax
/½a½
cosb= ay
/½a½
cosc= az
/½a½, т.к
 ½a½=Öax
2
+ay
2
+az
2
имеем cosa= ax
/Öax
2
+ay
2
+az
2
ит.д. ½a½=Öax
2
+ay
2
+az
2
имеем cosa= ax
/Öax
2
+ay
2
+az
2
ит.д.
19.Полярные координаты
.
Пусть на плоскости дана точка О – полюс и луч ОР – полярная ось. Тогда положение точки М на плоскости определяет полярный угол j = ÐМОР и радиус-вектор r = ОМ. Пару (r,j)-называют полярными координатами ,где r-полярный радиус точки, j-полярный угол.
Таким образом на плоск. Можно задать еще одну корд. Сист.-полярную. Прямоугольную декартову сист. Будем наз-ть согласованной с данной полярной
Если полярная ось совпадает с осями координат декарт сист., то
х = rCosj, y = Sinj
и обратный переход
r = Öx2
+ y2
, tgj = y / x.
32. Классификация функций. Основные элементарные функции
Основные элементарные функции
:
- постоянная у = с, с = const;
- степенная у = хn
, nÎR;
- показательная у = ах
, а > 0, a ≠ 1;
- логарифмическая у = loga
x, а > 0, a ≠ 1;
- тригонометрические у = Sin(x), y = Cos(x), y = tg(x), y = ctg(x);
обратные тригонометрические y = arcSinx, y = arcCosx и др.
11. Основная теорема алгебры
Всякий многочлен с любыми числовыми коэф., степень к-го не меньше единицы имеет хотя бы один корень в общем случае комплексный.
Рассмотри многочлен ¦(х) с комплексн. коэф., как комплексн. функцию комплексного переменного.
Таким обр. х может принимать любые значения, т.е. переменная х ихменяется на комплексной плоскости.
Значение функции ¦(х) также будут комплексными числами. Можно считать, что эти значения отличаются на второй комплексной плоскости, подобно тому, как в случае действит. Функций действ. Переменного. Значения независимого переменного отмечаются на одн. Числ. Прямой(оси абсцисс), а значение функции на др.(оси ординат).
Замечание:
многочлен ¦(х) является непрерывной функцией комлексного переменного х для любого положит. Числа e,можно найти токое положит. Число d, что из усл. |х-х0
|ádÞ|¦(х) -¦(х0
) |áe .
Лемма:
если своб. Член многочлена ¦(х) = a0
xn
+ a1
xn-1
+ a2
xn-2
+…+ an
-1
x равен нулю т.е. r(o)=0, то для всякого eñ 0 можно подобрать такое dñ0,что при всех х, для к-х |х|ád будет |¦(х) |áe
Действительно, пусть число а имеет макс. значение:
А=max ( |a0
|, |a1
|,|a2
|,…|an
-1
| ). Число e нам уже дано. Покажем, что если число d взять равным выражением d = e/А+e, то оно будет удовлетворять требуемым усл.
В самом деле, |¦(х) |£|a0
||х|n
+|a1
||х|n
-1
+…+|an
-1
||х|£ А(|х|n
+|х|n
-1
+|х|), т.е.
¦(х) £ А |х|- |х|n
+1
|/1- |х|, т.к. |х|ád и d =e/А+e, получим:
|х|-|х|n
+1
/1- |х|á|х|/ 1- |х|, т.е.
¦(х) á А |х||/1- |х |á А*d/1-dá А* (e/А+e)/ 1- (e /А+e)=e.
ЧТД
(12-14).(1) Прямоугольные координаты на плоскости
Две взаимно перпендикулярные оси Ox и Oy, имеющие общее начало O и одинаковую единицу масштаба, образуют декартову (или прямоугольную) систему координат на плоскости. Ось Ox называется осью абсцисс, ось Oy - осью ординат, точка O
- началом координат. Плоскость, в которой расположены оси Ox и Oy , называется координатной плоскостью и обозначается Oxy.
Пусть M - произвольная точка плоскости. Опустим из неё перпендикуляры MA и MB на оси Ox и Oy. Прямоугольными координатами x и y точки M называются величины OA и OB направленных отрезков OA иOB : x=OA,
y=OB
.
Координаты x и y точки M называются соответственно её абсциссой
и ординатой.
Символ M(x;y) означает, что точка M имеет координаты x и y. Начало координат имеет координаты (0;0).
Таким образом, каждой точке плоскости соответствует пара чисел (x;y) - её прямоугольные координаты.
Оси координат разбивают плоскость на четыре части, их называют четвертями
, квадрантами
или координатными углами
и нумеруют римскими цифрами I, II, III, IY.
12.(2) Расстояние м/у двумя точками плоскости
Расстояние м/у точками на корд. Оси вычисляется по формуле:
d= d(M1
,M2
)=|x2
-x1
|. Если на плоскости задана прямоугольная декартова система координат, то расстояние м/у точками вычисляется по формуле: d= d(M1
,M2
)=Ö(х2
-х1
)2
+ (y2
-y1
)2
Замечание:
расстояние м/у точками М1
(x1
,y1
,z1
) и M2
(x2
,y2
,z2
) вычисляется по формуле: d= d(M1
,M2
)=Ö(х2
-х1
)2
+ (y2
-y1
)2
+(z2
-z1
)2
13. (2) Деление отрезка в данном отношении
Пусть М1
(x1
,y1
) и M2
(x2
,y2
)-различные точки плоскости
Пусть М(х,у) лежит на отрезке М1
M2
и делит его в отношении l1
: l2
, т.е. ïМ1
Mï / ïМM2
ï=l1
/ l2
Требуется выразить координаты х и у точки М через координаты точек М1
и M2
и числа l1
, l2.
Предположим, что отрезок М1
M2
не пераллелен оси ОУ, отсюда: ïМ1
Mï / ïМM2
ï= ïМ1х
Mхï / ïМхM2х
ï;
ïМ1х
Mхï=|x1
-x|; ïМхM2х
ï=|x-x2
|, т.е. |x1
-x|/|x-x2
|=l1
/ l2
Тоска М лежеит м/у точками М1
и M2
Þх1
á х áх2
либо х1
ñ х ñ х2
Þ разности . x1
-x и x-x2
имеют одинаковые знаки, а x1
-x/x-x2
=l1
/ l2
отсюда: х=l2
х1
+ l1
х2
/l1
+l2
В случае, когда М1
M2
параллелен ОУ, т.е. х1
=х2
=х справедливость формулы у= х=l2
у1
+ l1
у2
/l1
+l2
доказывается аналогичным рассуждением.
14. Уравнение окружности, уравнение эллипса
Уравнение окружности. Вывод
:
общее свойство точек окружности |СМ| = R;
переход к координатной форме общего свойства
Ö(х – а)2
+ (у – в)2
= R, (х – а)2
+ (у – в)2
= R2
.
Вывод уравнения окружности
:
обозначим через М (х, у) произвольную точку линии;
запишем равенством общее свойство всех точек линии;
входящие в это равенство отрезки выразим через текущие координаты (х, у) точки М и другие параметры задачи.
Фигура окружность.
Общее свойство |ОМ| = R.
Ö(х2
+ у2
) = R.
х2
+ у2
= R2
.
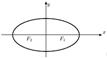
Эллипс
- это геометрическое место точек M(x;y), сумма расстояний от каждой из которых до двух данных точек F1
и F2
, называемых фокусами, есть величина постоянная.
Выведем уравнение эллипса. Пусть, согласно определени Легко проверить (по известной из школы формуле расстояния между двумя точками), что верны следующие равенства:
Поэтому из равенства r1
+r2
=2a получаем:

или (a2
-c2
)x2
+a2
y2
= a2
(a2
-c2
), а так как a>c (или 2a>2c в треугольнике MF2
F1
), то a2
-c2
>0. Обозначим b2
=a2
-c2
, тогда получим b2
x2
+a2
y2
= a2
b2
, или соотношение вида:
Это уравнение называется каноническим уравнением эллипса, величины r1
и r2
- фокальные радиусы точки M(x;y), F1
, F2
- фокусы эллипса, x=0, y=0 - оси симметрии, величина 2a - большая ось, 2b - малая ось, 2c=|F1
F2
| - фокусное расстояние, величина  - эксцентриситет эллипса. - эксцентриситет эллипса.
юэллипса, r1
+r2
= |F2
M| + |F1
M| =2a-const.
18. 1)Угол между плоскостями
Рассмотрим 2 плоск. a и b, заданных уравнениями


Требуется найти угол j между этими плоскостями.

Углом j м/у двумя плоскостями будем наз-ть один из 2-х гранных углов, образованных этими плоскостями.
Замечание:
1. a^b,n1
^n2
Û n1
· n2
=0.
2. a½½bÛ n1
½½n2
2) расстояние от точки до плоскости

15. Прямоугольные декартовы координаты в пространстве. Уравнение сферы
Если в пространстве задана прямоугольная декартова система координат Oxyz, то точка A пространства, имеющая координаты x (абсцисса), y (ордината) и z (аппликата), обозначается A(x,y,z)
.
Расстояние d между двумя точками A(x1
,y1
,z1
) и B(x2
,y2
,z2
) определяется по формуле:
 . . |
(1) |
В частности, расстояние d точки A(x,y,z) от начала координат определяется по формуле  . .
Пусть отрезок AB, соединяющий точки A(x1
,y1
,z1
) и B(x2
,y2
,z2
) разделен точкой C(x0
,y0
,z0
) на два отрезка AC и CB, причем  . Тогда координаты точки C(x0
,y0
,z0
), делящей отрезок AB в отношении . Тогда координаты точки C(x0
,y0
,z0
), делящей отрезок AB в отношении  (считая от A к B) определяется формулами (считая от A к B) определяется формулами
 . . |
(2) |
Координаты середины отрезка, т.е. когда  или AC=CB можно вычислить по формулам или AC=CB можно вычислить по формулам
 . . |
(3) |
Уравнение сферы:
(x
- x
0
)2
+ (y
- y
0
)2
+ (z
- z
0
)2
= R
2
Множество точек  , координаты которых удовлетворяют уравнению , координаты которых удовлетворяют уравнению  , где , где  , ,  , ,  и и  --- заданные числа, есть сфера радиуса с центром --- заданные числа, есть сфера радиуса с центром  , т.е. уравнение , т.е. уравнение  является уравнением сферы. является уравнением сферы.
30. Понятие сложной и обратной функции
Сложная функция
-функция от функции. Если величина y является функцией от u,
то есть у = f
(u
),
а и,
в свою очередь, функцией от х,
то есть u =
j(х
),
то у
является С. ф. от х,
то есть y = f
[(x
)],
определённой для тех значений х,
для которых значения j(х
) входят в множество определения функции f
(u
).
В таком случае говорят, что у
является С. ф. независимого аргумента х,
а u —
промежуточным аргументом. Например, если у = u2
, u =
sinx,
то у
= sin2
х
для всех значений х.
Обратная функция
Рассмотрим взаимнооднозначное соотв. у=¦(х), при к-м каждый элемент у яв-ся образом одного и только одного элемента х, тогда можно считать у аргументом вычислить соотв. знач. х, т.е. определить функцию х= f-1
(у) – к-я и будет наз-ся обратной
31. Четные, нечетные, периодические функции
Функция у = f
(x
) называется чётной
, если она не меняется, когда независимое переменное изменяет только знак, то есть, если f
(—x
) = f
(x
).
Если же f
(—x
)= — f
(x
),то функция f
(x
) называется нечётной
. Например, у =
cosx
, у = x
2
—
чётные функции, а
= у
sinx
, у
= x
3
— нечётные. График чётной функции симметричен относительно оси Оу
, график нечётной функции симметричен относительно начала координат.
Функция, не удовлетворяющая данным соотношениям - функция общего вида
Замечание:
следует заметить, что произведение 2-х четных, а также 2-х нечетных функ. Дает функ. четную, а произв. Четной на нечетную-нечетную.Например, у=x*sinx-четная, y=x*cosx-нечетная.
Функция у = ¦(х)-непереодическая, если сущ такое число Т не равное нулю, что ¦(х+Т)=¦(х), при этом наименьшее положительное число Т наз-ся периодом
38. Бесконечно малые и бесконечно большие функции. Их свойства
Функция f(x) называется бесконечно малой при х®а, где а может быть числом или одной из величин ¥, +¥ или -¥, если  .Бесконечно малой функция может быть только если указать к какому числу стремится аргумент х. При различных значениях а функция может быть бесконечно малой или нет. .Бесконечно малой функция может быть только если указать к какому числу стремится аргумент х. При различных значениях а функция может быть бесконечно малой или нет.
Теорема.
Для того, чтобы функция
f
(
x
) при х
®
а имела предел, равный А, необходимо и достаточно, чтобы вблизи точки х = а выполнялось условие
f
(
x
) =
A
+
a
(
x
),
где
a
(х) – бесконечно малая при х
®
а (
a
(х)
®
0 при х
®
а).
Свойства бесконечно малых функций:
1.Сумма фиксированного числа бесконечно малых функций при х®а тоже бесконечно малая функция при х®а.
2.Произведение фиксированного числа бесконечно малых функций при х®а тоже бесконечно малая функция при х®а.
3.Произведение бесконечно малой функции на функцию, ограниченную вблизи точки х = а является бесконечно малой функцией при х®а.
4.Частное от деления бесконечно малой функции на функцию, предел которой не равен нулю есть величина бесконечно малая.
Бесконечно большие функции
Предел функции f(x) при х®а, где а- число, равен бесконечности, если для любого числа М>0 существует такое число D>0, что неравенствоïf(x)ï>M
выполняется при всех х, удовлетворяющих условию0 < ïx - aï < D
Записывается  . .
Собственно, если в приведенном выше определении заменить условие ïf(x)ï>M на f(x)>M, то получим: а если заменить на f(x)<M, то: а если заменить на f(x)<M, то:
Функция называется бесконечно большойпри х®а, где а – чосли или одна из величин ¥, +¥ или -¥, если  , где А – число или одна из величин ¥, +¥ или -¥. , где А – число или одна из величин ¥, +¥ или -¥.
Связь бесконечно больших и бесконечно малых функций осуществляется в соответствии со следующей теоремой.
Теорема.
Если
f
(
x
)
®
0 при х
®
а (если х
®
¥
) и не обращается в ноль, то
35.Предел функции на бесконечности
Пусть функция f(x) определена на (a, + ∞). Число A называется пределом функции f(x) при x → + ∞ (обозначается A =
lim
x → + ∞
f(x) ), если ε > 0 N: x > N |f(x) − a| < ε.
Пусть функция f(x) определена на ( − ∞,a).
Число A называется пределом функции f(x) при x → − ∞ (обозначается A =
lim
x → − ∞
f(x) }, если ε > 0 N: x < − N |f(x) − a| < ε.
Если существуют пределы функции f(x) при x → + ∞ и при x → − ∞ и они равны одному и тому же числу A, то это число A называется пределом функции f(x) при x → ∞ {обозначается
A =
lim
x → ∞
f(x) .
Теоремы о пределах последовательностей и правила их вычисления распространяются и на пределы функций в бесконечности.
36. Предел функции в точке
Пусть функция f(x) определена в некоторой проколотой окрестности точки x0 .
Число A называется пределом функции f(x) при x → x0 (или в точке x0), если для любого ε > 0 найдется δ > 0 такое, что для всех x, для которых 0 < |x − x0| < δ, справедливо неравенство
|f(x) − A| < ε, т.е.
lim
x → x0
f(x) = A ε > 0 δ > 0 : 0 < |x − x0| < δ |f(x) − A| < ε.
Используем понятие окрестности и учтем, что
0 < |x − x0| < δ x
•
O
δ (x0 ) и |f(x) − A| < ε f(x) Oε (A).
(Точка над символом окрестности указывает, что это проколотая окрестность.)
Теперь определение предела функции в точке можно представить в виде
lim
x → x0
f(x) = A ε > 0 δ > 0 : x
•
Oδ (x0 ) f(x) Oε (A).
10. Геометрическое представление комплексных чисел.
Действительные числа изображаются точками на числовой прямой:

Здесь точка A
означает число –3, точка B
– число 2, и O
– ноль. В отличие от этого комплексные числа изображаются точками на координатной плоскости. Выберем для этого прямоугольные (декартовы) координаты с одинаковыми масштабами на обеих осях. Тогда комплексное число a+ bi
будет представлено точкой Р с абсциссой а и ординатой b
(см. рис.). Эта система координат называется комплексной плоскостью
.

Модулем
комплексного числа называется длина вектора OP
, изображающего комплексное число на координатной (комплексной
) плоскости. Модуль комплексного числа a+ bi
обозначается | a+ bi
| или буквой r
и равен:

Сопряжённые комплексные числа имеют одинаковый модуль. __
Аргумент
комплексного числа
- это угол между осью OX
и вектором OP
, изображающим это комплексное число. Отсюда, tan = b
/ a
. между осью OX
и вектором OP
, изображающим это комплексное число. Отсюда, tan = b
/ a
.
Тригонометрическая форма комплексного числа.
Абсциссу a
и ординату b
комплексного числа a + bi
можно выразить через его модуль r
и аргумент  :
:

Операции с комплексными числами, представленными в тригонометрической форме.

Это знаменитая формула Муавра.

Здесь k
- целое. Чтобы получить n
различных значений корня n
-ой степени из z
необходимо задать n
последовательных значений для k
( например, k
= 0, 1, 2,…, n
– 1 ) .
8. Геометрический смысл действий над комплексными числами
Действия над комплексными числами имеют простой геометрический смысл. Начнём со сложения. Пусть число  изображается точкой изображается точкой  , ,  - точкой - точкой  , а , а  - точкой - точкой  (рис 3). Тогда (рис 3). Тогда  , ,  , ,  . Таким образом, точка имеет координаты . Таким образом, точка имеет координаты  и, значит, и, значит,  . .
Выясним геометрический смысл операций умножения комплексного числа на вещественное. Пусть число  изображается точкой изображается точкой  , ,  - вещественное число; - вещественное число;  изображается точкой . Тогда изображается точкой . Тогда  , ,  . Таким образом, точка имеет координаты . Таким образом, точка имеет координаты  и, значит, и, значит,  (рис 4). (рис 4).
Геометрический смысл операции умножения на комплексное число мы выясним позже.В дальнейшем мы часто будем отождествлять комплексное число с точкой на комплексной плоскости, его изображающей. Так, например, мы будем говорить «точка» вместо более длинной фразы «точка, изображающая комплексное число».
34. Бесконечно малая и бесконечно большая величины.
Если предел некоторой переменной равен 0, то эта переменная называется бесконечно малой
.
П р и м е р . Функция y
=  является бесконечно малой при x
, является бесконечно малой при x
,
cтремящемся к 4, так как 
Если абсолютное значение некоторой переменной неограниченно возрастает, то эта переменная называется бесконечно большой
.

Бесконечно большая величина не имеет конечного
предела, но она имеет так называемый бесконечный
предел, что записывается как:

Символ  ( “бесконечность” ) не означает некоторого числа, он означает только, что дробь неограниченно возрастает при x
, стремящемся к 3. Следует отметить, что дробь может быть как положительной ( при x
> 3 ), так и отрицательной ( при x
< 3 ). Если бесконечно большая величина может быть только положительной при любых значениях x
, это отражается в записи. Например, при x ( “бесконечность” ) не означает некоторого числа, он означает только, что дробь неограниченно возрастает при x
, стремящемся к 3. Следует отметить, что дробь может быть как положительной ( при x
> 3 ), так и отрицательной ( при x
< 3 ). Если бесконечно большая величина может быть только положительной при любых значениях x
, это отражается в записи. Например, при x
 0 функция y
= x
- 2
бесконечно большая, но она положительна как при x
> 0, так и при x
< 0 ; это выражается так: 0 функция y
= x
- 2
бесконечно большая, но она положительна как при x
> 0, так и при x
< 0 ; это выражается так:

Наоборот, функция y
= - x
- 2
всегда отрицательна, поэтому
В соответствии с этим, результат в нашем примере можно записать так:


33. Числовые последовательности и пределы
Если каждому натуральному числу n поставлено в соответствие некоторое вещественное число  то говорят, что задана
числовая последовательность то говорят, что задана
числовая последовательность  Кратко она обозначается символом Кратко она обозначается символом   называют
n
-м членом последовательности. Совокупность этих чисел называют множеством значений последовательности. называют
n
-м членом последовательности. Совокупность этих чисел называют множеством значений последовательности.
Существует несколько способов задания числовых последовательностей.
Последовательность может быть задана при помощи формулы, позволяющей вычислить каждый ее член по номеру (например,  ). ).
Часто последовательность задается при помощи
рекуррентной формулы, позволяющей определить каждый член последовательности по одному или нескольким предыдущим; при этом необходимо задание одного или нескольких первых членов последовательности. К таковым относятся арифметическая и геометрическая прогрессии или, например,
последовательность Фибоначчи, задаваемая формулой
| xn
+ 2
= xn
+ 1
+ xn
при n > 0 |
и условиями x1
= 1, x2
= 1.
Иногда последовательность задается описанием ее членов, например, последовательность, у которой xn
равен n-му знаку после запятой в десятичной записи числа π = 3,14159265358979323..., задается следующим образом: x1
= 1, x2
= 4, x3
= 1, x4
= 5, x5
= 9, x6
= 2, x7
= 6, x8
= 5, x9
= 3, x10
= 5 и т. д.
Число a называется
пределом последовательности {xn
}, если для каждого ε > 0 существует такой номер Nε
, что для всех n ≥ Nε
выполняется неравенство
т. е.  При этом пишут, что При этом пишут, что  или или  при n → ∞. Кратко это определение можно записать так: при n → ∞. Кратко это определение можно записать так:
Интервал (a – ε; a + ε) называют
ε-окрестностью точки a.
Проще говоря, число a называется пределом последовательности {xn
}, если в любой ε-окрестности точки a лежат все члены последовательности {xn
}, за исключением, может быть, конечного их числа. Отсюда легко заметить, что изменение конечного числа членов последовательности не влияет ни на факт существования предела, ни на величину последнего.
Так, если  то то  Действительно, выбрав для произвольного ε > 0 Действительно, выбрав для произвольного ε > 0  получаем получаем  , так как , так как  . Здесь существенно, что Nε
зависит от ε. . Здесь существенно, что Nε
зависит от ε.
Для
стабилизирующейся последовательности (т. е. последовательности {xn
} такой, что xn
= a при n ≥ n0
) в качестве Nε
для любого ε можно взять n0
.
Последовательность, у которой существует предел, называется
сходящейся. Если никакое число не является пределом последовательности, то она называется
расходящейся.
Можно показать, что числовая последовательность имеет только один предел.
Последовательность  называется
возрастающей, если для любого называется
возрастающей, если для любого  выполняется неравенство выполняется неравенство
Последовательность  называется
убывающей, если для любого называется
убывающей, если для любого  выполняется неравенство выполняется неравенство
Если в этих определениях неравенство будет нестрогим, то последовательности будут называться соответственно
неубывающей и
невозрастающей.
Возрастающие и убывающие последовательности называют
строго монотонными. Неубывающие и невозрастающие последовательности называют
монотонными.
16. Элементы аналитической геометрии в пространстве. Уравнение плоскости.
Пусть  - радиус-вектор текущей точки M(x,y)
плоскости; - радиус-вектор текущей точки M(x,y)
плоскости;  - единичный вектор, имеющий направление перпендикуляра, опущенного на плоскость из начала координат; - единичный вектор, имеющий направление перпендикуляра, опущенного на плоскость из начала координат;  - углы, образованные этим перпендикуляром с осями координат Ox, Oy, Oz
; p
- длина этого перпендикуляра, тогда уравнение плоскости в векторной форме
имеет вид - углы, образованные этим перпендикуляром с осями координат Ox, Oy, Oz
; p
- длина этого перпендикуляра, тогда уравнение плоскости в векторной форме
имеет вид
  При переходе к координатам уравнение принимает вид: При переходе к координатам уравнение принимает вид:
17 УРАВНЕНИЯ ПРЯМОЙ.
1)
Прямая может быть задана уравнениями двух плоскостей
2). пересекающихся по этой прямой.
Исключив поочередно x
и y
из уравнений, получим

3). Здесь прямая определена двумя плоскостями, проецирующими её на плоскости x0Z и y0Z.
Уравнения прямой, проходящей через две точки M1
(x1
;y1
;z1
) и M2
(x2
;y2
;z2
)
имеют вид
18. Угол между плоскостями, расстояние от точки до плоскости.
Расстояние от точки до плоскости.
Это длина перпендикуляра, опущенного из данной точки на данную плоскость.
 А А

В
АВ перпендикулярны плоскости альфа; длина перпендикуляра АВ- расстояние от точки А до плоскости альфа.
    Угол между двумя плоскостями
это наименьший двугранный угол, получившийся при пересечении этих плоскостей. Угол между 2 плоскостями может Угол между двумя плоскостями
это наименьший двугранный угол, получившийся при пересечении этих плоскостей. Угол между 2 плоскостями может
принимать значение от 0* до 90*. Если угол между плоскостями=0, то эти плоскости совпадают или переллельны. Если угол между плоскостями =90*, то плоскости перпендикулярны.
Угол альфа0 угол между плоскостями альфа и бэтта.
21. Угол между двумя векторами. Проекция вектора на ось
углом м/у двумя векторами a и b наз-ся наименьший угол j(0£jáp/2), на к-й надо повернуть один вектор до его совпаления с другим.
Проекция вектора на ось нах-ся по след алгоритму:
1. Обозначим через А1 и В1 проекции начала и конца вектора АВ на ось l
2. Через х1 и х2 обозначим координаты точек соответственно
3. Разность (х2-х1) будем наз-ть проекцией вектора АВ на ось l и записывать прl
AB=(х2-х1), если угол j м/у векторами острый прl
AB ñ 0, прl
AB á 0 – тупой; если прl
AB=0-j = 90°
28. Функция одной переменной, график, способы задания
На множестве D, к-е явл-ся подмножеством действ. Чисел задана функция y=¦(x), если для любого х, принадл множеству D поставлена в соотв. любому х по определенному правилу или закону единственное значение у из Е¦ÌR, где D-наз-ся областью определения(задания) функции, а Е¦={у, /у=¦(х)}-областью значений(изменения) функции.
Значения х наз-ся аргументом функции или независимыми переменными, значения у-зависимые переменные.
Наиб распр способы задания функции:
· Формульный или аналитический
· Графический
· Логический
· Табличный
29. Параметрический способ задания функции. Параметрическое уравнение окружности, эллипса.
Пусть даны две функции: х=j(t), y=y(t) (1)
одной независимой переменной t, определенные и непрерывные в одном и том же промежутке. Если х=j(t) строго монотонна, то обратная к ней функция t=F(х) однозначна, также непрерывна и строго монотонна. Поэтому у можно рассм как функцию, зависящую от переем t, называемой параметром: y= y[F(х) ]. В этом случае говорят, что функция у от х задана параметрически с помощью уравнения (1).
Отметим, что функция непрерывна в силу теоремы о непрерывности сложной функции.
Пример 2 Пусть х =a cos t, y= bsint (0£t£2p)
Данные равенства являются параметрическими уравнениями эллипса, т.к. эллипс получается из окружности радиуса а сжатием ее в a/b раз вдоль оси Оу. Из примера 1 следует, что параметрическими уравнениями окружности х2
+у2
=r2
явл-ся уравнения х =a cos t, y= bsint (0£t£2p). Итак, параметрические уравнения эллипса получаются из параметрических уравнений окружности умножением правой части уравнения для ординаты у на b/a и имеют вид: х =a cos t, y= bsint (0£t£2p). Можно поступить проще. Исключая из этих уравнений параметр t(разрешая их относительно cost и sint, возводя полученные не равенства в квадрат и складывая), получаем:
(х/а)2
+ (у/b)2
= cos2
t + sin2
t = 1 –уравнение эллипса.
|




