ЛЕКЦИЯ №9
МНОГОЧЛЕНЫ ЧЕБЫШЕВА
1. Определение и свойства
2. Интерполяция по Чебышевским узлам
3. Многочлены равномерных приближений
4. Экономизация степенных рядов
Многочленом Чебышева n-ой степени называется функция
Tn
(x)=cos (narccos) n=0,1,2 …,xÎ[-1;1] ; (9.1)
Докажем, что при любом n=0,1,2
n=0: T0
(x)=cos0=1;
n=1: T1
(x)=cos(arccos x)=x;
n=2: T2
(x) =cos(2arccos x);
Обозначимα=arccosx
Tn
(x)=cos2α ;
Tn+1
(x)=cos((n+1)α) ;
Tn-1
(x)=cos((n-1)α) ;
cos((n+1)α)+ cos((n-1)α)-2cos(2nα/ α)cos(2α/ α)=2 cosnα cosα;
Tn+1
(x)+ Tn-1
(x)=2 T1
(x) Tn
(x);
Tn+1
(x)= 2xTn
(x)- Tn-1
(x); (9.2)
Свойства многочлена Чебышева:
1. Все функции Tn
(x) являются многочленами при n=0,1,2,…
2. Степени этих многочленов возрастают с увеличением n, причем старший член Tn
(x)=2n
-1
xn
3. Многочлены Tn
(x) при четных n выражаются через четные функции , при нечетных n-через нечетные функции.
Проверим:
T2
(x) =2х2
-1
T3
(x) =2х (2х2
-1) =4х3
-2х
T4
(x) = 2х (4х3
-3х)-2х2
+1=23
х4
-3х2
+1
4. На отрезке [-1;1] многочлен Tn
(x) имеет ровно n различных действительных корней, которые рассчитываются по формуле:
Докажем:
Так как arccosxÎ[0; Π];k=0,1,…n-1,чтобы туда попадал arcos

5. Корни многочлена Чебышева перемножаются, чередуются с точками их экстремума, причем максимум
Tn
(x) на [-1;1] равен 1,т.е
Для точек экстремума существует связь:

Введем нормированный многочлена Чебышева (старший коэффициент =1, перед х в максимальной степени)
 (9.3) (9.3)
Теорема Чебышева
Из всех многочленов степени n со старшим коэффициентом = 1, нормированный многочлен Чебышева отклоняется от нуля на отрезке [-1;1] , т.е не существует многочлена Рn
*(x), что :
max | Рn
*(x)| < max | T^n
(x)|
[-1;1][-1;1] Доказательство не нужно.
Интерполяция по Чебышевским узлам
Задача: Пусть есть некоторая функция f(x), определенная на отрезке [a;b]. Как расположить на отрезке [a;b] n+1 узел интерполяции таким образом, чтобы минимизировать максимальное отклонение интерполяционного полинома Лагранжа от f(x), т.е ошибку аппроксимации.
Остаточный член полинома Лагранжа
Необходимо минимизировать этот максимум, т.е необходимо найти такие узлы xk
,  которые минимизировали бы которые минимизировали бы 
Реклама

Сведем [a;b] к отрезку [-1;1]
Должна существовать связь хÎ[a;b] с tÎ[-1;1]
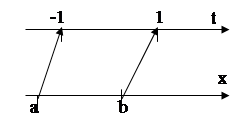
Связь: x= Ct+D
C-коэффициент сжатия (растяжения, D-параллельный перенос)
Если t=1

Если t=-1
Тогда:
 (9.4) (9.4)
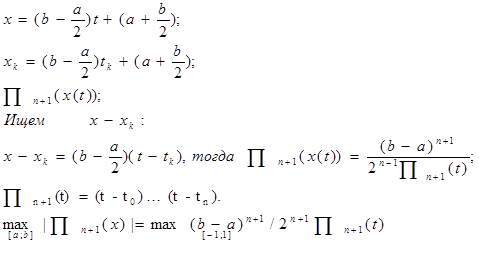
 Для того чтобы минимизировать (9.4), необходимо найти такие корни Для того чтобы минимизировать (9.4), необходимо найти такие корни
tk
Î[-1;1],  , при котором Πn
+1
(t) будет минимальным. , при котором Πn
+1
(t) будет минимальным.
По теореме Чебышева
полином Тn
+1
нормирован многочленом Чебышева, наименее отклонен от нуля на [-1;1], поэтому в качестве искомых корней необходимо взять корни многочлена Чебышева на [-1;1]
 (рассмотрим полином n+1-ой степени) (рассмотрим полином n+1-ой степени)
  (9.5) (9.5)
Узлы интерполяции, определим по формуле (9.5) обеспечивают min, max ошибку аппроксимации при помощи интерполяционных полиномов.
Многочлены равномерных приближений
Если функция f(x) ∞-но дифференцируема на [a;b] и в качестве узлов интерполяции берутся корни многочленов Чебышева, приведенные к [a;b], то справедливо:

Т.е имеет место равномерная сходимость последовательности интерполяционного полинома Лагранжа функции f(x).
Теорема Вейерштрасса
: для любой непрерывной функции f(x) на [a;b] найдется полином Qn
(x), что |f(x)- Рn
(x)| < ξ для любой ξ>0 , любое хÎ[a;b].
Т.е для любой f(x) непрерывной на [a;b],может быть построена аппроксимирующий наилучший полином, который минимизирует максимальное отклонение между f(x) и Qn
(x). Такие полиномы называютмногочленами наилучших равномерных приближений.
К сожалению, общий вид таких полиномов и способы построения не известны.
Экономизация степенных рядов
Ряд Тейлора представляет собой локальную аппроксимацию для f(x) степенной функции вида xn
можно заменить многочлен Чебышева и получить разложение по этим многочленам вместо степенного ряда:

Такой процесс называется экономизацией степенного ряда.
Разложение по многочленам Чебышева имеет меньшую максимальную погрешность.
ЛЕКЦИЯ №10,11
ИНТЕРПОЛЯЦИОННЫЕ СПЛАЙНЫ
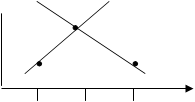
Когда интерполяционный отрезок [a;b] велик, нет, основания считать, функцию f(x) достаточно гладкой, на [a;b], то нельзя повышать точность аппроксимации за счет увеличения степени интерполяционного многочлена.
Связано это с тем, что у многочлена n-ой степени может быть n-1 точка экстремума. При n→∞ график многочлена начинает сильно колебаться
 
Такое явление называют феноменом Рунге.
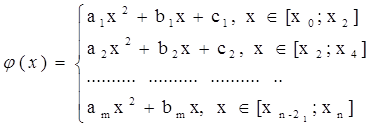
Поэтому более перспективным является применение кусочно-полиномиальной аппроксимации, при которой аппроксимирующая функция составляется из отдельных многочленов (сплайнов). Каждый из которых (одинаковы и наибольшей степени) определен на своем участке отрезка [a;b].
Реклама

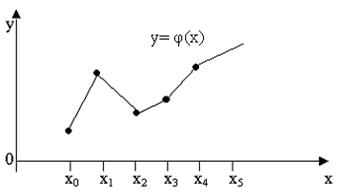
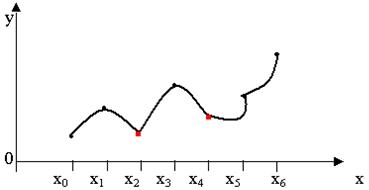
Рассмотрим аппроксимацию кусочно-линейной функции
(линейный сплайн).
Пусть f(x) задана таблично на [a;b], т. е определены некоторые узлы интерполяции a≤x0
<x1
<…<xn
≤b
 кусочно-линейная функция кусочно-линейная функция
Необходимо: φ(xi
)=yi
=f(xi
),  для приближения функции. для приближения функции.
 Определим ai
и bi
. Определим ai
и bi
.
x=x0
: φ(x0
)=f(x0
)=y0
a1
x0
+b1
=y0
 x=x1
: φ(x1
)=f(x1
)=y1
a1
x1
+b1
=y1 x=x1
: φ(x1
)=f(x1
)=y1
a1
x1
+b1
=y1
a2
x1
+b2
=y1
x0
x1
x2
Получим систему:
а0
x0
+b1
=y0
(решаем по отдельности каждую систему)
a2
x1
+b2
=y1
a2
x1
+b2
=y1
a2
x2
+b2
=y2
(10.2)
an
xn-1
+bn
=yn
an
xn
+bn
= yn
Таким образом, получена система из 2n уравнений для поиска 2n неизвестных. Причем, система (10.2)
образована из n систем линейных уравнений для 2-х неизвестных, каждая из которых может решаться независимо от остальных.
Кусочно-линейная функция φ(x) вида (10.1) внутри интервала (хi
-1
;xi
), непрерывна и дифференцируема, а в точках xi
,  непрерывна, но не дифференцируема(в этих точках к графику функции невозможно построить касательную). непрерывна, но не дифференцируема(в этих точках к графику функции невозможно построить касательную).
Кусочно-квадратичная аппроксимация
Пусть f(x) задана таблично на [a;b], но n=2m (четно) a≤x0
<x1
<…<xn
≤b
Чтобы функция приближала f(x) наложим ограничения φ(xi
)=yi
=f(xi
), .
Общее число узлов 2n+1, если n-четное.
Для нахождения неизвестных коэффициентов ak
,bk
,ck
необходимо построить 3m условий.
k=1
[x0
;x2
]
Обобщим, получим систему:
  (10.4) (10.4)
Для нахождения неизвестных имеем 3m условий. При каждом значении  можем построить систему линейных уравнений для ak
,bk
,ck
; можем построить систему линейных уравнений для ak
,bk
,ck
;
Решать ее можем независимо от остальных условий.
Кусочно- квадратичная φ(x) вида (10.3) внутри интервала (x2
n
-2
-x2
n
),  является непрерывной и дифференцируемой два раза, а в точках x2
i является непрерывной и дифференцируемой два раза, а в точках x2
i

является непрерывной, но не дифференцируемой.
Определение Сплайна
Пусть на отрезке [a;b] задана некоторая система узлов a
0
≤
x
0
<
x
1
<…<
xn
≤
b
Сплайном
Sn
(
x
)
называется функция, которая определена на [a;b], l раз непрерывна и дифференцируема на нем, при этом на каждом из отрезков
[хк-1
; хк
], к =  , представляет собой многочлен степени m. , представляет собой многочлен степени m.
Разность (m-1) называется дефектом Сплайна
(показывает разность между степенью составляющих его многочленов и степенью гладкости общей функции).
Если сплайн построен по некоторой таблично заданной функции f(x) таким образом, что S(хi
)= f(xi
); xi
, i= - узлы интерполяции, то сплайн называют интерполяционным. Узлы сплайна и узлы интерполяции функции могут не совпадать.
Очевидно, что функция (10.1) является интерполяционным сплайном степени 1, дефекта 1, а кусочно-квадратичная функция (10.3) является интерполяционным сплайном, степени 2, дефекта 2.
Интерполяционный сплайн степени 3, дефекта 1.
Дважды непрерывно – дифференцируемый – сплайн.
Пусть задана табличная функция на [a;b], причем a= χ0
≤ χ1
<…< χn
=b (узлы сплайна совпадают с узлами интерполяции). Общий вид:

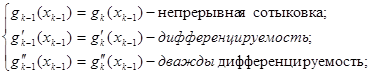
Условия:
1.) g(xi
) = f(xi
)=yi
, i=
2.) g(x) = c2
(дважды дифференцируема) [a;b]
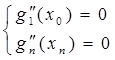
3.) – краевые условия
Для нахождения неизвестных коэффициентов введем функцию
gn
(x) = ak
(x-xk
)3
+ bk
(x-xk
)2
+c1
(x-xk
)+dk
, xÎ[ xk
-1
;xk
]
1.) g1
(x0
) = y0
, g1
(x1
) = y1
, g2
(x2
) = y2
,… gn
(xn
) = yn
2.) первое условие (сплайн интерполяционный)
3.)  
Краевые условия:
Таким образом, для нахождения 4n неизвестных мы построим 4n условий.
Теорема(10.1).
Интерполяционный сплайн вида (10.5) для функции f(x) единственен.
Теорема(10.2).
Пусть g(x)- интерполяционный сплайн степени 3 дефекта 1, построенный для функции f(x) С4
на отрезке [a;b], тогда для  найдется такая константа C>0, что: найдется такая константа C>0, что:
|f(x)- g(x)|<C 4
, 4
,  [a ;b], [a ;b],
 = max(xk
-xk-1
), 1≤ k ≤ n = max(xk
-xk-1
), 1≤ k ≤ n
 - максимальное расстояние между узлами интерполяции. - максимальное расстояние между узлами интерполяции.
Линейный фильтр
Понятие линейного сплайна позволяет сформулировать подходы к построению линейных фильтров, предназначенных для устранения случайных ошибок в данных.
Обычно в ходе измерений на процесс фиксации данных оказывают влияние случайные помехи. Для того, чтобы уменьшить влияние этих помех на качество интерполяции осуществляют пересчет значений функции в узлах интерполяции по следующей формуле:

Квадратичный сплайн дефекта один
Узлы этого сплайна не совпадают с узлами интерполяции функции.
Пусть узлы интерполяции заданы на [a;b] 
 - узлы сплайна, f(xi
)=yi - узлы сплайна, f(xi
)=yi
  , ,  , , 
Для сплайна n+2 узлов
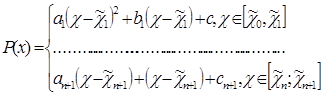
Квадратичный сплайн дефекта 1 имеет вид:
Условия:
1.) 
2.) P(x) ÎC'[a;b],  первая непрерывная производная во всех точках [a;b] первая непрерывная производная во всех точках [a;b]
3.) Краевые условия:
P''(a)=A; P''(b)=B;
A и B- константы и желательно разные;
Чтобы построить сплайн необходимо найти 3n+3 неизвестных коэффициента. С этой целью сформирую функцию:
Pn
(x)= ak
 2
+bn 2
+bn +ck
+ck

Условия:
1.) Pi+1
=yi
, i= - n+1 условий - n+1 условий
2.) Pk
 = Pk+1
, = Pk+1
, 
P'k
=P'k+1
, 
3.) P1
 =A, P''n
+1 =A, P''n
+1
 -B – краевые условия; -B – краевые условия;
Теорема 11.1.
Квадр. Сплайн дефекта один, вида (11.1) для функции существует и единственен.
Теорема 11.2
. Пусть функция f(x) дважды непрерывна и дифференцируема на [a;b], а P(x)- сплайн вида (11.1), тогда для  , (n- связано с числом узлов интерполяции) такие constc0
, c1
, c2
; что для , (n- связано с числом узлов интерполяции) такие constc0
, c1
, c2
; что для  из [a;b] выполняются следующие неравенства: из [a;b] выполняются следующие неравенства:
| f(x)-P(x) | ≤ C0
∆2
| f '(x)-P' (x)|≤C∆
| f ''(x)-P'' (x)|≤C2
где ∆- максимальное расстояние между узлами интерполяции, т.е ∆= max(xk
-xk
-1
) 1≤k≤n
Метод наименьших квадратов
1. Формула метода наименьших квадратов, для линейной функции нескольких переменных.
2. Типовые способы преобразования нелинейной функции к линейной.
3. Метод наименьших квадратов для системы линейно – независимых функций.
4. Ряды и полиномы Фурье с использованием метода наименьших квадратов.
Пусть аппроксимируемая функция представляет собой функции n переменных y= f(x1
…xn
), которая задана таблицей своих значений:
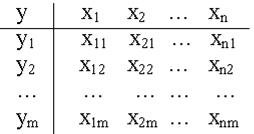
информационная матрица
Такие таблицы формируются в ходе эксперимента для реальных объектов, у которых есть одна выходная переменная (отклик), которая зависит от нескольких выходных переменных (факторов).

необходимо аппроксимировать нашу функцию при помощи построения линейной функции (приближающей).
Необходимо построить приближение данной функции f(x1
…xn
), заданной инфо - матрицей посредством функции φ (x1
…xn
)=y, которая должна быть линейной, т.е. ее общий вид:
y= φ (x1
…xn
)=b0
+b1
x1
+…+bn
xn
(11.2)
bi
– неизвестные коэффициенты (параметры)
Задача аппроксимации состоит в определении bi
.
Каков критерий для выбора этих параметров?
Пусть f(x)-функция одной переменной и точки, в которой она определена, изображены на координатной плоскости.
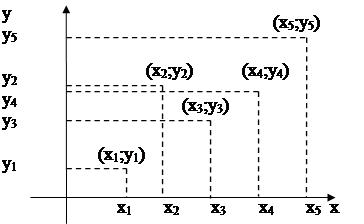
Проводим прямую, минимизируем сумму квадратов расстояний.
Поскольку в ходе эксперимента на объект могут воздействовать случайные помехи, то в инфо – матрице могут присутствовать значения, которые не характерны для самой функции, в силу этого требовать от аппроксимирующей функции совпадения значений со значениями исходной функции во всех точках неверно.
Необходимо минимизировать сумму квадратов отклонений аппроксимирующей функции от исходных в заданных точках:
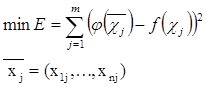 (11.3) (11.3)
Для данной задачи критерий (11.3) будет иметь вид:
 (11.4) (11.4)
Функция квадратичная, параболоид. Точка, в которой производные частные все будут равны 0
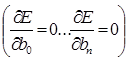 (11.5) (11.5)
Так как функция (11.4) является квадратичной относительно переменных bi
, то для нахождения ее минимума по этим переменным достаточно решить систему (11.5)
 (11.6) (11.6)
В системе (11.6) каждое уравнение делим на 2 и раскрываем сумму; перенося сумму с частью yj
знак равенства:
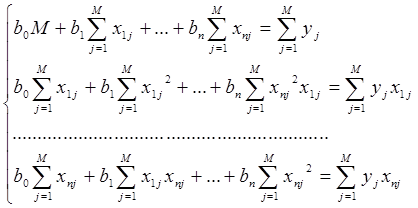 (11.7) (11.7)
Система (11.7) представляет собой СЛАУ относительно bi
и может быть решена одним из известных методов.
Для упрощения записи и решения представим систему (11.7) в матричном виде. Введем матрицы:
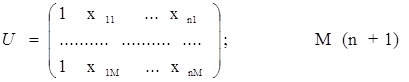
Столбец из 1 добавили в U с целью универсализации решений, так как линейную функцию можно представить в виде:
y= b0
x0
+b1
x1
+…+ bn
xn
, где x0
=1
   (n+1) (n+1) 1 1
Тогда система (11.7) может быть записана в следующем виде:
[UT
U]B=UT
Y(11.8)
Системы (11.7) и (11.8) называются нормальными. Используя, метод обратной матрицы система (11.8) имеет вид:
B= [UT
U]-1
UT
Y(11.9)
(
11.9) - метод наименьших квадратов для линейной функции.
|
