Федеральное агентство по образованию Российской Федерации
Челябинский государственный университет
Институт экономики отраслей, бизнеса и администрирования
Реферат
по предмету: «Физика»
на тему: «Поступательное и вращательное движения абсолютно твёрдого тела. Момент силы относительно точки. Пара сил»
выполнил: Измайлов П.С.
группа 27 ПС-205
проверил: Михайличенко И.Н
Челябинск
2010
Поступательное и вращательное движения абсолютно твердого тела
Абсолютно твёрдое тело
в механике — механическая система, обладающая только поступательными и вращательными степенями свободы. «Твёрдость» означает, что тело не может быть деформировано, то есть телу нельзя передать никакой другой энергии, кроме кинетической энергии поступательного или вращательного движения.
Также можно дать альтернативное определение: абсолютно твёрдое тело — тело (система), взаимное положение любых точек, которого не изменяется, в каких бы процессах оно ни участвовало.
Поступательное движение
Поступательным
называется такое движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается, оставаясь параллельной своему начальному направлению.
Поступательное движение не следует смешивать с прямолинейным. При поступательном движении тела траектории его точек могут быть любыми кривыми линиями. Приведем примеры.
1. Кузов автомобиля на прямом горизонтальном участке дороги движется поступательно. При этом траектории его точек будут прямыми линиями.
2. Спарник АВ (рис. 7) при вращении кривошипов О1А и О2В (О1А и О2В) также движется поступательно (любая проведенная в нем прямая остается параллельной ее начальному направлению). Точки спарника движутся при этом по окружностям.
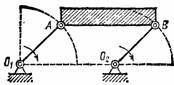
Рис 7

Рис.8
Свойства поступательного движения определяются следующей теоремой: при поступательном движении все точки тела описывают одинаковые (при наложении совпадающие) траектории и имеют в каждый момент времени одинаковые по модулю и направлению скорости и ускорения.
Для доказательства рассмотрим твердое тело, совершающее поступательное движение относительно системы отсчета Oxyz. Возьмем в теле две произвольные точки А и В, положения которых в момент времени t определяются радиусами-векторами  и и  (рис. 8). (рис. 8).
Проведем вектор  , соединяющий эти точки. Тогда , соединяющий эти точки. Тогда
 . .
При этом длина АВ постоянна, как расстояние между точками твердого тела, а направление АВ остается неизменным, так как тело движется поступательно. Таким образом, вектор АВ во все время движения тела остается постоянным (АВ=сопst). Вследствие этого, траектория точки В получается из траектории точки А параллельным смещением всех ее точек на постоянный вектор . Следовательно, траектории точек А и В будут действительно одинаковыми (при наложении совпадающими) кривыми.
Реклама

Для нахождения скоростей точек А и В продифференцируем обе части равенства по времени. Получим
 . .
Но производная от постоянного вектора АВ равна нулю. Производные же от векторов rA и rB по времени дают скорости точек А и В. В результате находим, что
 , ,
т. е. что скорости точек А и В тела в любой момент времени одинаковы и по модулю, и по направлению. Беря от обеих частей полученного равенства производные по времени:
 или или  . .
Следовательно, ускорения точек А и В тела в любой момент времени тоже одинаковы по модулю и направлению.
Так как точки А и В были выбраны произвольно, то из найденных результатов следует, что у всех точек тела их траектории, а также скорости и ускорения в любой момент времени будут одинаковы. Таким образом, теорема доказана.
Из теоремы следует, что поступательное движение твердого тела определяется движением какой-нибудь одной из его точки. Следовательно, изучение поступательного движения тела сводится к задаче кинематике точки, нами уже рассмотренной.
При поступательном движении общую для всех точек тела скорость  называют скоростью поступательного движения тела, а ускорение называют скоростью поступательного движения тела, а ускорение  - ускорением поступательного движения тела. Векторы и можно изображать приложенными в любой точке тела. - ускорением поступательного движения тела. Векторы и можно изображать приложенными в любой точке тела.
Заметим, что понятие о скорости и ускорении тела имеют смысл только при поступательном движении. Во всех остальных случаях точки тела, как мы увидим, движутся с разными скоростями и ускорениями, и термины «скорость тела» или «ускорение тела» для этих движений теряют смысл.
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ ОСИ. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ
Вращательным движением твердого тела вокруг неподвижной оси называется такое его движение, при котором какие-нибудь две точки, принадлежащие телу (или неизменно с ним связанные), остаются во все время движения неподвижными (рис. 10).
Проходящая через неподвижные точки А и В прямая АВ называется осью вращения.
Так как расстояния между точками твердого тела должны оставаться неизменными, то очевидно, что при вращательном движении все точки, принадлежащие оси вращения, будут неподвижны, а все остальные точки тела будут описывать окружности, плоскости которых перпендикулярны оси вращения, а центры лежат на этой оси.
Реклама

Для определения положения вращающегося тела проведем через ось вращения, вдоль которой направим ось АZ, полуплоскость - неподвижную и полуплоскость  , врезанную в само тело и вращающуюся вместе с ним (см. рис. 9). Тогда положение тела в любой момент времени однозначно определится взятым с соответствующим знаком углом , врезанную в само тело и вращающуюся вместе с ним (см. рис. 9). Тогда положение тела в любой момент времени однозначно определится взятым с соответствующим знаком углом  между этими полуплоскостями, который назовем углом поворота тела. Будем считать угол положительным, если он отложен от неподвижной плоскости в направлении против хода часовой стрелки (для наблюдателя, смотрящего с положительного конца оси АZ), и отрицательным, между этими полуплоскостями, который назовем углом поворота тела. Будем считать угол положительным, если он отложен от неподвижной плоскости в направлении против хода часовой стрелки (для наблюдателя, смотрящего с положительного конца оси АZ), и отрицательным,

Рис 9
если по ходу часовой стрелки. Измерять угол будем всегда в радианах. Чтобы знать положение тела в любой момент времени, надо знать зависимость угла от времени t
, т. е.
 . .
Уравнение выражает закон вращательного движения твердого тела вокруг неподвижной оси.
Основными кинематическими характеристиками вращательного движения твердого тела являются его угловая скорость  и угловое ускорение и угловое ускорение  . .
Если за промежуток времени  тело совершает поворот на угол тело совершает поворот на угол  , то численно средней угловой скоростью тела за этот промежуток времени будет , то численно средней угловой скоростью тела за этот промежуток времени будет  . В пределе при . В пределе при  найдем, что найдем, что
 или или  . .
Таким образом, числовое значение угловой скорости тела в данный момент времени равно первой производной от угла поворота по времени. Знак определяет направление вращения тела. Легко видеть, что когда вращение происходит против хода часовой стрелки, >0, а когда по ходу часовой стрелки, то <О.
Размерность угловой скорости 1/Т (т. е. 1/время); в качестве единицы измерения обычно применяют рад/с или, что то же, 1/с (с-1), так как радиан - величина безразмерная.
Угловую скорость тела можно изобразить в виде вектора  , модуль которого равен || и который направлен вдоль оси вращения тела в ту сторону, откуда вращение видно происходящим против хода часовой стрелки (рис.11). Такой вектор определяет сразу и модуль угловой скорости, и ось вращения, и направление вращения вокруг этой оси. , модуль которого равен || и который направлен вдоль оси вращения тела в ту сторону, откуда вращение видно происходящим против хода часовой стрелки (рис.11). Такой вектор определяет сразу и модуль угловой скорости, и ось вращения, и направление вращения вокруг этой оси.
Угловое ускорение характеризует изменение с течением времени угловой скорости тела. Если за промежуток времени угловая скорость тела изменяется на величину  , то числовое значение среднего углового ускорения тела за этот промежуток времени будет , то числовое значение среднего углового ускорения тела за этот промежуток времени будет . В пределе при найдем, . В пределе при найдем,

Рис 10
 или или  . .
Таким образом, числовое значение углового ускорения, тела в данный момент времени равно первой производной от угловой скорости или второй производной от угла поворота тела по времени.
Размерность углового ускорения 1/T2 (1/время2); в качестве единицы измерения обычно применяется рад/с2 или, что то же, 1/с2 (с-2).
Если модуль угловой скорости со временем возрастает, вращение тела называется ускоренным, а если убывает, - замедленным. Легко видеть, что вращение будет ускоренным, когда величины и имеют одинаковые знаки, и замедленным, - когда разные.
Угловое ускорение тела (по аналогии с угловой скоростью) можно также изобразить в виде вектора , направленного вдоль оси вращения. При этом
 . .
Направление совпадает с направлением , когда тело вращается ускоренно и (рис.10,а), противоположно при замедленном вращении (рис.10,б),
РАВНОМЕРНОЕ И РАВНОПЕРЕМЕННОЕ ВРАЩЕНИЯ
Если угловая скорость тела остается во все время движения постоянной (=const), то вращение тела называется равномерным. Найдем закон равномерного вращения. Из формулы имеем  . .
Отсюда, считая, что в начальный момент времени t=0 угол  , и беря интегралы слева от , и беря интегралы слева от  до , а справа от 0 до t, получим окончательно до , а справа от 0 до t, получим окончательно
 . .
Из равенства следует, что при равномерном вращении, когда 
 и и  . .
В технике скорость равномерного вращения часто определяют числом оборотов в минуту, обозначая эту величину через n об/мин. Найдем зависимость между n об/мин и 1/с. При одном обороте тело повернется на угол  , а при n оборотах на , а при n оборотах на  ; этот поворот делается за время t=1 мин= 60 с. Из равенства следует тогда, что ; этот поворот делается за время t=1 мин= 60 с. Из равенства следует тогда, что
 . .
Если угловое ускорение тела во все время движения остается постоянным  , то вращение называется равнопеременным. Найдем закон равнопеременного вращения, считая, что в начальный момент времени t=0 угол , а угловая скорость =0 (0 - начальная угловая скорость). , то вращение называется равнопеременным. Найдем закон равнопеременного вращения, считая, что в начальный момент времени t=0 угол , а угловая скорость =0 (0 - начальная угловая скорость).
Из формулы  имеем имеем  . Интегрируя левую часть в пределах от 0 до , а правую - в пределах от 0 до t, найдем . Интегрируя левую часть в пределах от 0 до , а правую - в пределах от 0 до t, найдем  , ,
 или или  . .
Вторично интегрируя, найдем отсюда закон равнопеременного вращения
 . .
Если величины и имеют одинаковые знаки, то вращение будет равноускоренным, а если разные - равнозамедленным.
Скорости и ускорения точек вращающегося тела
Установив характеристики движения всего тела в целом, перейдем к изучению движения отдельных его точек.
1. Скорости точек тела. Рассмотрим какую-нибудь точку М твердого тела, находящуюся на расстоянии h от оси вращения (см.рис.9). При вращении тела точка М будет описывать окружность радиуса h, плоскость которой перпендикулярна оси вращения, а центр С лежит на самой оси. Если за время dt происходит элементарный поворот тела на угол  , то точка М при этом совершает вдоль своей траектории элементарное перемещение , то точка М при этом совершает вдоль своей траектории элементарное перемещение  . Тогда числовое значение скорости точки будет равно отношению ds к dt, т.е . Тогда числовое значение скорости точки будет равно отношению ds к dt, т.е
 или или  . .
Скорость в отличие от угловой скорости тела называют иногда еще линейной или окружной скоростью точки М.
Таким образом, числовое значение скорости тонки вращающегося. твердого тела равно произведению угловой скорости тела на. расстояние от этой точки до оси вращения.
Направлена скорость по касательной к описываемой точкой окружности или перпендикулярно плоскости, проходящей через ось вращения и точку М.
Так как для всех точек тела имеет в данный момент времени одно и то же значение, то скорости точек вращающегося тела пропорциональны их расстояниям от оси вращения.
 |
 |
| Рис.11 |
Рис. 12 |
Ускорения точек тела. Для нахождения ускорения точки М воспользуемся формулами  , ,  . .
В нашем случае  =h. Подставляя значение v в выражения =h. Подставляя значение v в выражения  и аn , получим: и аn , получим:
 
или окончательно:
 , ,  . .
Касательная составляющая ускорения направлена по касательной к траектории (в сторону движения при ускоренном вращении тела и в обратную сторону при, замедленном); нормальная составляющая  всегда направлена по радиусу МС к оси вращения (рис. 12). Полное ускорение точки М будет всегда направлена по радиусу МС к оси вращения (рис. 12). Полное ускорение точки М будет  или или  . .
Отклонение вектора полного ускорения от радиуса описываемой точкой окружности определяется углом  , который вычисляется по формуле , который вычисляется по формуле  . Подставляя сюда значения и , получаем . Подставляя сюда значения и , получаем 
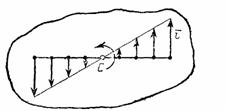
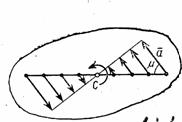
Так как w и имеют в данный момент времени для всех точек тела одно и то же значение, то ускорения всех точек вращающегося твердого тела пропорциональны их расстояниям от оси вращения и образуют в данный момент времени один и тот же угол с радиусами описываемых ими окружностей. Поле ускорений точек вращающегося твердого тела имеет вид, показанный на рис.14.
 |
 |
| Рис 13 |
Рис 14 |
2. Векторы скорости и ускорения точек тела. Чтобы найти выражения непосредственно для векторов v и а, проведем из произвольной точки О оси АВ радиус-вектор r точки М (рис. 14). Тогда h=r sin а и по формуле
 или или  . .
Таким образом, модуль векторного произведения  равен модулю скорости точки М. равен модулю скорости точки М.
Направления векторов и v тоже совпадают (оба они перпендикулярны плоскости ОМВ) и размерности их одинаковы. Следовательно,  - формула Эйлера, т.е. вектор скорости любой точки вращающегося тела равен векторному произведению угловой скорости тела на радиус-вектор этой точки. - формула Эйлера, т.е. вектор скорости любой точки вращающегося тела равен векторному произведению угловой скорости тела на радиус-вектор этой точки.
Момент силы относительно точки
Момент силы
(синонимы:
крутящий момент; вращательный момент; вертящий момент; вращающий момент
) — векторная
физическая величина
, равная произведению радиус-вектора
проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы
на твёрдое тело.
Момент силы
В физике
момент силы можно понимать как «вращающая сила». В системе СИ
единицами измерения для момента силы является ньютон-метр
, хотя сантиньютон-метр (cN•m), футо-фунт (ft•lbf), дюйм-фунт (lbf•in) и дюйм-унция (ozf•in) также часто используются для выражения момента силы. Символ момента силы τ (тау). Момент силы иногда называют моментом пары сил, это понятие возникло в трудах Архимеда над рычагами. Вращающиеся аналоги силы
, массы
и ускорения
есть момент силы, момент инерции
и угловое ускорение
соответственно. Сила, приложенная к рычагу, умноженная на расстояние до оси вращения рычага, есть момент силы. Например, сила в 3 ньютона, приложенная к рычагу, расстояние, до оси вращения которого 2 метра, это то же самое, что 1 ньютон, приложенный к рычагу, расстояние, до оси вращения которого 6 метров. Более точно, момент силы частицы определяется как векторное произведение:

где  — сила, действующая на частицу, а — сила, действующая на частицу, а  — радиус-вектор
частицы. — радиус-вектор
частицы.
Момент силы имеет размерность сила на расстояние
, и в системе СИ
единицей момента силы является «ньютон
-
метр
». Джоуль
, единица СИ для энергии
и работы, тоже определяется как 1Н*м, но эта единица не используется для момента силы. Когда энергия представляется как результат «сила на расстояние», энергия скалярная, тогда как момент силы — это «сила, векторно умноженная на расстояние» и таким образом она (
псевдо)
векторная величина. Конечно, совпадение размерности этих величин не простое совпадение; момент силы 1Н*м, приложенный через целый оборот, требует энергии как раз 2*π джоулей. Математически
 , ,
где Е — энергия, τ — вращающий момент, θ — угол в радианах.
Момент силы относительно точки
Если имеется материальная точка  , к которой приложена сила , к которой приложена сила  , то момент силы относительно точки , то момент силы относительно точки  равен векторному произведению радиус-вектора равен векторному произведению радиус-вектора  , соединяющий точки O
и OF
, на вектор силы : , соединяющий точки O
и OF
, на вектор силы :
 . .
Пара сил
Пара сил, система двух силP
иP
"
,действующих на твёрдое тело, равных друг другу по абсолютной величине, параллельных и направленных в противоположные стороны (т. е. P
" = -
P
; см. рис.
). Пара сил не имеет равнодействующей, т. е. её действие на тело не может быть механически эквивалентно действию какой-нибудь одной силы; соответственно Пара сил нельзя уравновесить одной силой.
Расстояние l
между линиями действия сил пары называется плечом Пара сил действие, оказываемое Парой сил на твёрдое тело, характеризуется её моментом, который изображается вектором М
, равным по абсолютной величине Pl
и направленным перпендикулярно к плоскости действия Пары сил в ту сторону, откуда поворот, совершаемый Парой сил, виден происходящим против хода часовой стрелки (в правой системе координат). Основное свойство Пары сил: действие, оказываемое ею на данное твёрдое тело, не изменяется, если Пара сил переносить куда угодно в плоскости пары или в плоскости, ей параллельной, а также если изменить абсолютную величину сил пары и длину её плеча, сохраняя неизменным момент Пара сил Таким образом, момент Пара сил можно считать приложенным к любой точке тела. Две Пара сил с одинаковыми моментами М
,приложенные к одному и тому же твёрдому телу, механически эквивалентны одна другой. Любая система Пара сил, приложенных к данному твёрдому телу, механически эквивалентна одной Пара сил с моментом, равным геометрической сумме векторов-моментов этих Пара сил Если геометрическая сумма векторов-моментов некоторой системы Пара сил равна нулю, то эта система Пара сил является уравновешенной.

|
