|
В настоящее время наиболее распространенными и массово выпускаемыми промышленностью являются системы управления электроприводом, построенные по принципу подчиненного управления. По сравнению с предшествующими им системами они обладают большим быстродействием, выполнены на базе унифицированных элементов, что облегчает проектирование и сборку. Хотя в наши дни существуют системы управления, обеспечивающие лучшие показатели, системы подчиненного управления все еще актуальны.
Принципы подчиненного управления позволяют соединить систему управления с объектом независимо от того, используется ли в нем система ТП-Д, Г-Д либо иной управляемый преобразователь. Большая инерционность электромашинных устройств компенсируется, возможно ограничение динамических токов на заданном уровне.
Целью данной курсовой работы является расчет позиционной системы подчиненного управления со следующими параметрами: статизм скоростного контура — не более 5%; диапазон регулирования — 300¸1; момент инерции на валу 0.8JДВ
.
Двигатель типа П143–4К со следующими паспортными данными:
РН
= 200 кВт;
UН
= 600 В;
IН
= 360 А;,
nН
= 500 об/мин;
2р = 4;
rЯ
= 0.05196 Ом;
rК
= 0.03125 Ом;
rД
= 0.00834 Ом;
rВ
= 3.9 Ом;
JД
= 42.75 кг×м2
.
Как известно, из всех способов регулирования и изменения направления скорости, использование реверсивного тиристорного преобразователя (РТП) является одним из самых современных способов создания быстродействующего регулируемого электропривода постоянного тока. Реверсивным тиристорным преобразователем называется преобразователь, через который ток может протекать в обоих направлениях. Поскольку тиристоры пропускают ток только в одном направлении, то для изменения направления тока нагрузки необходимо использовать две группы вентилей, каждая из которых проводит ток в своем направлении. Эти группы вентилей чаще всего собираются по трехфазной мостовой или трехфазной нулевой схеме. Трехфазная нулевая схема отличается простотой, меньшим числом вентилей, применяемых в схеме. Трехфазная мостовая схема обладает рядом преимуществ по сравнению с трехфазной нулевой:
1) Выпрямленная ЭДС при одном и том же вторичном напряжении трансформатора в два раза больше;
2) Пульсации выпрямленной ЭДС в два раза больше по частоте и меньше по амплитуде;
3) Вентильные группы могут подключаться к сети без трансформатора;
4) Типовая мощность трансформатора меньше.
Перечисленные достоинства обуславливают преимущественное применение трехфазной мостовой схемы в системах электропривода (ЭП) мощностью десятки — сотни киловатт. Поскольку мощность ТП, питающего якорную цепь, достаточно велика, то выбираем трехфазную мостовую схему.
Реклама

Как было отмечено выше, для получения реверсивного ТП две группы вентилей определенным образом соединяют между собой. Различают встречно–параллельное и перекрестное соединение. При встречно–параллельном соединении применяется простой двухобмоточный трансформатор меньшей мощности. Преимущество перекрестной схемы в том, что в данной схеме аварийные процессы при одновременном включении тиристорных групп протекают легче, поэтому эту схему целесообразно применять в ответственных ЭП. На основании этого выбираем встречно–параллельное соединение выпрямительных групп.
Применяются два основных метода управления комплектами РТП: совместное и раздельное. При совместном управлении импульсы подаются на тиристоры обеих групп одновременно. При этом одна группа работает в выпрямительном режиме с углом регулирования aВ
, развивает среднее значение выпрямленного напряжения UaВ
и обеспечивает протекание тока через нагрузку. В это же время вторая группа переводится в инверторный режим с углом регулирования aИ
и среднее значение выпрямленного напряжения UaИ
. При таком управлении в РТП образуется замкнутый контур, по которому может протекать уравнительный ток. Для уменьшения этого тока углы регулирования должны быть в определенном соотношении. При согласованном управлении соотношение углов устанавливается таким образом, чтобы выполнялось соотношение:  . Это равенство выполняется при условии . Это равенство выполняется при условии  . При этом способе управления в уравнительном контуре протекает прерывистый ток, среднее значение которого называют статическим уравнительным током и ограничивают до допустимого уравнительными реакторами. Для уменьшения уравнительного тока применяют несогласованное управление группами тиристоров в РТП. При этом соотношение углов управления: . При этом способе управления в уравнительном контуре протекает прерывистый ток, среднее значение которого называют статическим уравнительным током и ограничивают до допустимого уравнительными реакторами. Для уменьшения уравнительного тока применяют несогласованное управление группами тиристоров в РТП. При этом соотношение углов управления:  . При этом в уравнительном контуре всегда имеется постоянная составляющая напряжения, направленная против проводимости тиристоров, поскольку инверторная группа развивает большее напряжение, чем выпрямительная. Это приводит к резкому уменьшению статического уравнительного тока, хотя динамический уравнительный ток уменьшается незначительно. Необходимо отметить также то, что протекание небольшого уравнительного тока благоприятно сказывается на статических характеристиках ТП. Таким образом, преимущества совместного управления: . При этом в уравнительном контуре всегда имеется постоянная составляющая напряжения, направленная против проводимости тиристоров, поскольку инверторная группа развивает большее напряжение, чем выпрямительная. Это приводит к резкому уменьшению статического уравнительного тока, хотя динамический уравнительный ток уменьшается незначительно. Необходимо отметить также то, что протекание небольшого уравнительного тока благоприятно сказывается на статических характеристиках ТП. Таким образом, преимущества совместного управления:
1) Отсутствие необходимости в переключениях силовой цепи;
2) Высокое быстродействие при переходе с одного режима в другой и постоянная готовность к этому переходу;
Реклама

3) Однозначность в статических характеристиках ТП.
В разрабатываемом преобразователе применим совместное управление вентильными группами.
Для управления ТП в настоящее время применяют главным образом безинерционные системы фазового управления с пилообразным или синусоидальным опорным напряжением. Достоинством синусоидальной формы опорного напряжения является линейность результирующей характеристики ТП. Однако диапазон регулирования угла a составляет менее 180О
, так как практически следует исключить из зоны регулирования окрестности минимума и максимума опорного напряжения, где оно практически не изменяется. Кроме того, сохранение строго синусоидальной формы опорного напряжения представляет значительные трудности. Поэтому в разрабатываемом ТП применим пилообразное опорное напряжение.
Падение напряжения на сглаживающем и уравнительных реакторах:
Классификационное падение напряжения на тиристоре при номинальной нагрузке принимаем: 
Напряжение спрямления ВАХ тиристора:

Допустимый ток вентилей:
Динамическое сопротивление тиристора:

Среднее значение падения напряжения на тиристоре:
Падение напряжения на обмотках трансформатора:

Коммутационное падение напряжения:

Запас по напряжению тиристорного преобразователя, необходимый для выполнения настройки контура на модульный или симметричный оптимум:

Возможные колебания напряжения от нестабильности питающей сети составляют:

ЭДС условного холостого хода тиристорного преобразователя:
1.2 Расчет параметров силового трансформатора
Линейное напряжение на вторичной обмотке силового трансформатора:

Фазное напряжение на вторичной обмотке силового трансформатора:
Действующее значение тока вторичной обмотки:

Действующее значение тока первичной обмотки:

Мощность на первичной и вторичной сторонах трансформатора и габаритная мощность трансформатора, имеющего одну первичную и одну вторичную обмотки:
Мощность трансформатора, имеющего одну первичную и две вторичные обмотки:

Выбираем трансформатор типа ТМ-400/10 со следующими параметрами:
PHTP
= 400 кВА; U2
Л
= 0.69 кB; UC
= 10 кB; I2H
= 1004 A;
DPXX
= 960 Вт; DPКЗ
= 5700 Вт; UКЗ
%
= 4.5 % IXX%
= 2.55%

Пересчитываем ЭДС условного холостого хода тиристорного преобразователя:

Определим активное и индуктивное сопротивление трансформатора:

Индуктивность фазы трансформатора:
Тиристор выбираем по протекающему через него току, условиям охлаждения вентилей и максимальному обратному напряжению.
Максимальное обратное напряжение на тиристоре:

где КЗН
= 1.25 … 2.0 — коэффициент запаса по напряжению, который учитывает возможность появления перенапряжения на тиристорах (принимаем КЗН
= 1.5);
КUОБР
= 1.045 — коэффициент обратного напряжения.
 В. В.
Среднее значение тока, который протекает через тиристор со стандартным радиатором при нормальной нагрузке и принудительном охлаждении:
где IH
= 360 A — номинальный ток двигателя;
Величина потерь в тиристоре:

По этим величинам выбираем тиристор типа Т15–160 с параметрами:
IВ. ДОП
= 160 А; rД
= 0.001 Ом;
Imax.cp = 160 А; UОБР. МАКС
= 1600 В; UОТКР.СОСТ
=1.8 В
Допустимые потери в тиристоре при прохождении через него тока в классификационной схеме:

Проверяем условия правильности выбора тиристоров:



Поскольку условия выполняются, то тиристоры выбраны правильно.
Сглаживающий реактор, включаемый последовательно с якорем двигателя необходим для:
1) Обеспечения непрерывного тока якоря двигателя в определенном диапазоне нагрузок и частот вращения его;
2) Ограничение амплитуды переменной составляющей тока якоря двигателя до допустимой величины.
Для обеспечения непрерывного тока при минимальной нагрузке РТП и угле регулирования aМАКС
индуктивность сглаживающего реактора можно определить по формуле:
где EdO
= 931.5 B — ЭДС условного холостого хода ТП;
eN
= 0.24 — коэффициент, определяемый по зависимости  ; ;
 — частота первой гармоники выпрямленного напряжения; — частота первой гармоники выпрямленного напряжения;
 — относительная величина эффективного значения первой гармоники выпрямленного тока; — относительная величина эффективного значения первой гармоники выпрямленного тока;
LЯД
— индуктивность якоря двигателя;
b = 2.
Относительная величина эффективного значения первой гармоники выпрямленного напряжения eN
определяется по величине максимального угла регулирования  соответствующей минимальной скорости двигателя: соответствующей минимальной скорости двигателя:
где rСУМ.ТП
— суммарное сопротивление выходной цепи ТП;
 — коэффициент пропорциональности между скоростью и ЭДС; — коэффициент пропорциональности между скоростью и ЭДС;
nМИН
— минимальная скорость двигателя.
где  — сопротивление якорной цепи двигателя. — сопротивление якорной цепи двигателя.
Таким образом:
Полагаем, что требуемый диапазон регулирования скорости равным DР
= 30, тогда минимальная скорость:
 об/мин. об/мин.
Суммарное сопротивление выходной цепи ТП:
где rД
= 0.001 Ом — динамическое сопротивление тиристора;
 — сопротивление фазы трансформатора; — сопротивление фазы трансформатора;
 — коммутационное сопротивление; — коммутационное сопротивление;
a = b = 2.
Таким образом: 
Далее получаем 
По графику (1, стр. 56) определяем: eN
= 0.24.
Индуктивность якоря двигателя:
 , ,
где К = 0.1 — коэффициент для компенсированных двигателей.
Таким образом:
Выбираем сглаживающий реактор типа ФРОС–1000/0.5УЗ с параметрами (три реактора, соединённых последовательно):
IСР.Н
= 800 А; LСР
= 3 х 5 мГн = 15 мГн; rСР
=3 х 7.2 мОм = 0.0216 Ом
Необходимая индуктивность двух насыщающихся уравнительных реакторов при совместном согласованном управлении выпрямительной и инверторной группами ТП:
где КЭФ
— коэффициент, зависящий от схемы соединения групп вентилей, угла регулирования a и характера нагрузки ТП, при  КЭФ
= 0.185; КЭФ
= 0.185;
 — частота схемы; — частота схемы;
КСХ
= 4 — коэффициент схемы;
LТР
= 161.717×10– 6
Гн — индуктивность фазы трансформатора;
 — действующее значение статического уравнительного тока. — действующее значение статического уравнительного тока.
Таким образом получаем:  12 мГн. 12 мГн.
По каталогу выбираем два насыщающихся уравнительных реактора типа РОС–100/05Т со следующими параметрами:
LУР
= 12 мГн; Iн
= 500 А; IУР
= 48 А; rУР
= 0.002314 Ом
Во время эксплуатации ТП могут возникать различные аварии, во время которых через тиристоры протекают токи, недопустимые по величине и времени действия. Для защиты от внутренних коротких замыканий используем быстродействующие плавкие предохранители, которые устанавливаются в цепях тиристоров.
Действующее значение тока тиристора в схеме Ларионова:

Выбираем предохранители ПП41: номинальное напряжение 760 В; номинальный ток плавкой вставки 250 А; коммутационная способность 300 кА
Для защиты от внешних КЗ используем автоматические выключатели QF1 и QF2, установленные во вторичной обмотке трансформатора. Номинальный ток электромагнитного расцепителя:
где КЭП
= 1.2 — коэффициент эксплуатационной перегрузки.
 А. А.
Ток уставки электромагнитного расцепителя:
 А. А.
Выбираем автоматический выключатель типа А3736Б (QF1, QF2) со следующими параметрами:
IН
.РАСЦ
= 400 A; IУСТ
= 4000 А.
Номинальный ток электромагнитного расцепителя автоматического выключателя QF3 (QF4), установленного в цепи постоянного тока:

Выбираем автомат типа А3795H со следующими параметрами:
IН.РАСЦ
= 630 B; IУСТ
= 2400 А.
Для защиты ТП от внешних перенапряжений применим защитную Rp
Cp
—цепочку, включенную на стороне переменного тока через дополнительный маломощный выпрямитель. Рассчитаем величины параметров элементов цепочки:
 мкФ. мкФ.
где I01%
= 1.8 — определяем по зависимости  . .
Рабочее напряжение конденсатора:
 В. В.
Выбираем конденсатор МБГП (два паралельно) емкостью по 10 мкФ каждый и рабочим напряжением 1000 В.
 Ом. Ом.
Мощность потерь на гасящем резисторе RД
:

В качестве резистора RД
выбираем резистор типа ПЭ сопротивлением 91 Ом и мощностью 50 Вт.
Сопротивление RР
:
 Ом. Ом.
Мощность потерь на разрядном резисторе:
В качестве RP
выбираем резистор типа МЛТ–1 сопротивлением 62Ом.
Для защиты ТП от внутренних перенапряжений применим защитную R1
C1
—цепочку. Рассчитаем величины параметров элементов цепочки:
 мкФ. мкФ.
Рабочее напряжение конденсатора:
 В. В.
Выбираем конденсатор МБГ4-1 емкостью 1 мкФ каждый и рабочим напряжением 750 В.
 Ом. Ом.
Мощность потерь на гасящем резисторе RД1
:

В качестве резистора RД
выбираем резистор типа ПЭ сопротивлением 91 Ом и мощностью 30 Вт.
Поскольку опорное напряжение СИФУ — пилообразное, то максимальный коэффициент усиления ТП по напряжению при угле регулирования a = 90О
:
Строим регулировочную характеристику ТП (рис. 1.3) при условном холостом ходу по формуле:

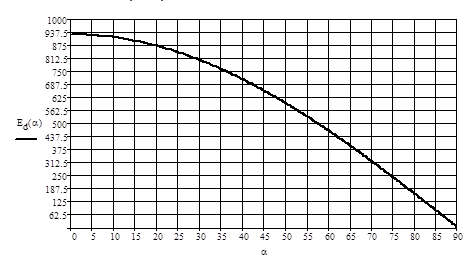
Рисунок 1.3 — регулировочная характеристика ТП
По рисунку 1.3 определяем приращения:

Коэффициент усиления блока вентилей Кα
:
Строим регулировочную характеристику CИФУ и определяем его коэффициент передачи:
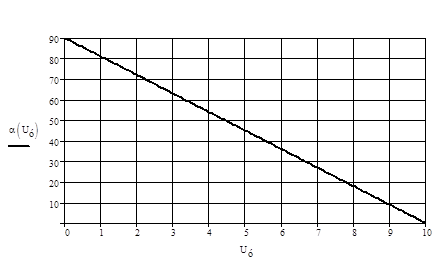
Рисунок 1.4 - Регулировочная характеристика СИФУ
По рисунку 1.4 определяем приращения:

Коэффициент усиления СИФУ:
1.8 система импульсно–фазового управления тиристорного преобразователя
Система импульсно–фазового управления (СИФУ) обеспечивает формирование управляющих импульсов силовых тиристоров в определенные моменты времени и в соответствии с требуемым значением напряжения (тока) на нагрузке. Угол сдвига этих импульсов относительно точек естественной коммутации, равный углу регулирования a, зависит от значения и знака входного сигнала UУ
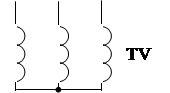
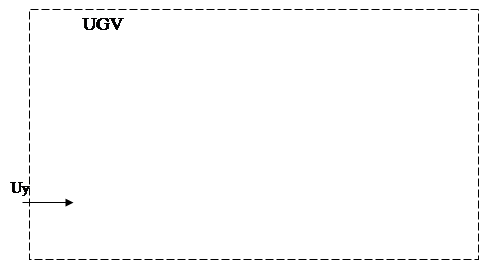
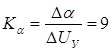
. Функционально СИФУ можно представить в виде пяти основных узлов (рис. 1.5).

На рис. 1.5 приняты следующие обозначения: UGV — СИФУ; UV — входное устройство; UVF — фазосмещающее устройство (ФСУ); ES — узел синхронизации; UG — источник питания; UF — формирующее устройство.
Входное устройства UV осуществляет согласование входа СИФУ с выходом источника управляющего сигнала, обеспечивает заданный диапазон (ограничение) углов  , а также задает некоторый угол aО
при UУ
= 0. Сигнал с выхода UV поступает на ФСУ, в котором осуществляется формирование системы импульсов, имеющих сдвиг фаз относительно точек естественной коммутации вентилей, пропорциональный этому сигналу. Узел ФСУ строится по принципу «вертикального» управления, который заключается в сравнении двух напряжений: управляющего UУ
и переменного опорного UОП
. Импульс UИМП
вырабатывается нуль–органом, на входе которого сравниваются UОП
и UУ
в момент равенства этих напряжений. Для трехфазной нулевой схемы, имеющей в одной вентильной группе 6 тиристоров, ФСУ имеет 6 каналов формирования UОП
, причем эти напряжения имеют сдвиг фаз, равный интервалу работы силовых тиристоров. В каждом канале опорное напряжение формируется с частотой равной частоте напряжения сети, причем начало коммутации вентиля данного канала, то есть работа формирователя опорного напряжения синхронизирована с помощью узла ES, состоящего из синхронизирующего трехфазного трансформатора, подключаемого к сети, синхронизированной с силовой сетью и фильтра. В задачу фильтра входит устранение искажений формы синхронизирующего напряжения. Мощность импульсов, формирующихся в ФСУ, недостаточна для управления силовыми тиристорами. Управляющие импульсы необходимой мощности, заданных формы и длительности вырабатываются формирующим устройством UF, которое также обеспечивает потенциальное разделение силовой части и системы управления. , а также задает некоторый угол aО
при UУ
= 0. Сигнал с выхода UV поступает на ФСУ, в котором осуществляется формирование системы импульсов, имеющих сдвиг фаз относительно точек естественной коммутации вентилей, пропорциональный этому сигналу. Узел ФСУ строится по принципу «вертикального» управления, который заключается в сравнении двух напряжений: управляющего UУ
и переменного опорного UОП
. Импульс UИМП
вырабатывается нуль–органом, на входе которого сравниваются UОП
и UУ
в момент равенства этих напряжений. Для трехфазной нулевой схемы, имеющей в одной вентильной группе 6 тиристоров, ФСУ имеет 6 каналов формирования UОП
, причем эти напряжения имеют сдвиг фаз, равный интервалу работы силовых тиристоров. В каждом канале опорное напряжение формируется с частотой равной частоте напряжения сети, причем начало коммутации вентиля данного канала, то есть работа формирователя опорного напряжения синхронизирована с помощью узла ES, состоящего из синхронизирующего трехфазного трансформатора, подключаемого к сети, синхронизированной с силовой сетью и фильтра. В задачу фильтра входит устранение искажений формы синхронизирующего напряжения. Мощность импульсов, формирующихся в ФСУ, недостаточна для управления силовыми тиристорами. Управляющие импульсы необходимой мощности, заданных формы и длительности вырабатываются формирующим устройством UF, которое также обеспечивает потенциальное разделение силовой части и системы управления.
Для РТП используется два блока, рассмотренной СИФУ, причем напряжения UУ подаваемые на вход СИФУ различных вентильных групп имеет противоположную полярность.
  
  Расчет регулятора тока Расчет регулятора тока
Рисунок 2.1 — структурная схема регулятора тока
Передаточная функция регулятора тока при оптимизации контура на модульный оптимум будет иметь вид:
Коэффициент передачи регулятора тока:

где ТОТ
= 2Тm = 0.01 с
RЭ
– суммарное активное сопротивление якорной цепи:

RШ
– сопротивление шунта:
LЭ
– суммарная индуктивность якорной цепи:

ТЭ
– электромагнитная постоянная времени якорной цепи:
Коэффициент передачи тиристорного преобразователя:
Коэффициент обратной связи по току:
где 
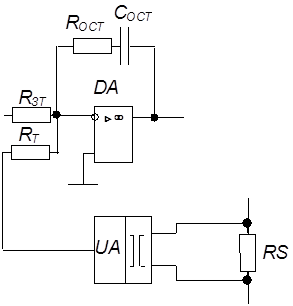
На рисунке 2.2 представлена функциональная схема регулятора тока.
Рисунок 2.2 — функциональная схема регулятора тока
На рисунке 2.3 представлена структурная схема регулятора тока.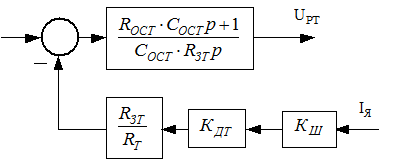

Рассчитываем элементы функциональной схемы регулятора тока по следующим соотношениям:
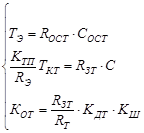
В качестве шунта RS выбираем шунт типа 75ШС, имеющий следующие параметры:
UН
= 75 мВ, IH
= 500 A
Коэффициент передачи датчика тока:
В качестве датчика тока применяем датчик тока типа ДТ3–AИ унифицированной блочной системы регуляторов (УБСР АИ). Этот датчик предназначен для формирования и ввода в систему регулирования аналогового сигнала, пропорционального току в цепи якоря двигателя. Датчик подключается к шунту в якорной цепи и обеспечивает гальваническую развязку между входными и выходными цепями с разностью потенциалов между ними до 1000 В.
Параметры датчика ДТ3–AИ (на схеме UA):
1) выходное напряжение ±10 В;
2) коэффициент передачи (регулируемый) КДТ
= 53¸135;
3) погрешность ≤ 1%
4) полоса пропускания wПР
= 1.5 кГц.
5) напряжение питания постоянным током 12.6 В
Принимаем конденсатор СОСТ
емкостью 1 мкФ.


Выбираем резистор RОСТ
марки МЛТ–0.125, сопротивлением 75 кОм.
Выбираем резистор RЗТ
марки МЛТ–0.125, сопротивлением 43 кОм.
Выбираем резистор RТ
марки МЛТ–0.125, сопротивлением 43 кОм.
Выбираем конденсатор СО
CТ
марки К50-6, емкостью 1мкФ.
2.2
       Расчет регулятора скорости
Расчет регулятора скорости
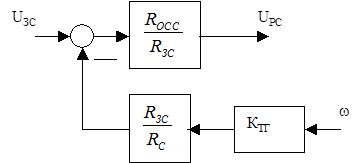
  Рисунок 2.4 — структурная схема регулятора скорости Рисунок 2.4 — структурная схема регулятора скорости
Согласно заданию, требуется обеспечить статическую ошибку регулирования в пределах 5%. Применение пропорционального регулятора скорости обеспечивает статизм
 , ,
что находится в пределах 5%, следовательно, возможно применение П-регулятора.
Коэффициент передачи регулятора скорости:

где ТКС
= 4Тm = 0.02 с
КОС
- коэффициент обратной связи по скорости:
где 
Суммарный момент инерции системы:

ТМ
– электромеханическая постоянная времени:

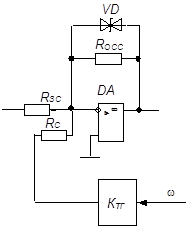
На рисунке 2.5 представлена функциональная схема регулятора скорости.Рисунок 2.5 – Функциональная схема регулятора скорости.
На рисунке 2.6 представлена структурная схема регулятора скорости.

В качестве датчика скорости выбираем тахогенератор типа ТД 201.
nH
= 1000 об/мин;
UH
= 110 B;
КТГ
= 1.05 В×с.
Рассчитываем элементы функциональной схемы регулятора скорости по следующим соотношениям:
Принимаем резистор RЗС
=51 кОм.

Выбираем резистор RЗС
марки МЛТ–0.125, сопротивлением 51 кОм.
Выбираем резистор RООС
марки МЛТ–0.125, сопротивлением 1.1 МОм.
Выбираем резистор RС
марки МЛТ–0.125, сопротивлением 300 кОм.
Выбираем стабилитрон VD типа КС210Б:
напряжение стабилизации — 10 В;
разброс напряжения стабилизации — ±0.7 В.
2.3



    Расчет регулятора положения Расчет регулятора положения
Передаточная функция регулятора будет иметь вид:
Рисунок 2.7 — структурная схема регулятора положения
Коэффициент передачи регулятора положения:

Коэффициент обратной связи: 
где SКР
= 400мм – максимально возможное перемещение.
На рисунке 2.8 представлена функциональная схема регулятора положения.
 Принимаем резистор RЗП
сопротивлением 51 кОм. Принимаем резистор RЗП
сопротивлением 51 кОм.


Выбираем резистор RЗП
марки МЛТ–0.125, сопротивлением 51 кОм.
Выбираем резистор RОСП
марки МЛТ–0.125, сопротивлением 100 кОм.
Выбираем резистор RП
марки МЛТ–0.125, сопротивлением 3.9 МОм.
Задатчик интенсивности скорости необходим для ограничения тока двигателя в переходных процессах.
Считаем, что электропривод разгоняется до номинальной скорости, то есть  , а пусковой ток IП
=1.5 IН
, статический ток IC
= IН
, тогда время разгона: , а пусковой ток IП
=1.5 IН
, статический ток IC
= IН
, тогда время разгона:
 с. с.
Коэффициент передачи ЗИС:
На рисунке 2.9 представлена функциональная схема задатчика интенсивности скорости.
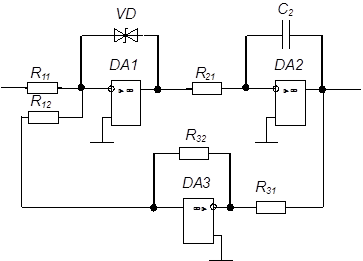
Рисунок 2.9 — функциональная схема задатчика интенсивности скорости
Принимаем конденсатор С2
емкостью 2 мкФ.
Принимаем:
R11
= R12
= 20 кОм;
R31
= R32
= 10 кОм.
Выбираем резисторы R11
и R12
марки МЛТ–0.125, сопротивлением 20кОм.
Выбираем резисторы R31
и R32
марки МЛТ–0.125, сопротивлением 10 кОм.
Выбираем резистор R21
марки МЛТ–0.125, сопротивлением 33 кОм.
Выбираем конденсатор СООС
марки МБМ, емкостью 2мкФ.
Выбираем стабилитрон VD типа КС210Б:
напряжение стабилизации — 10 В;
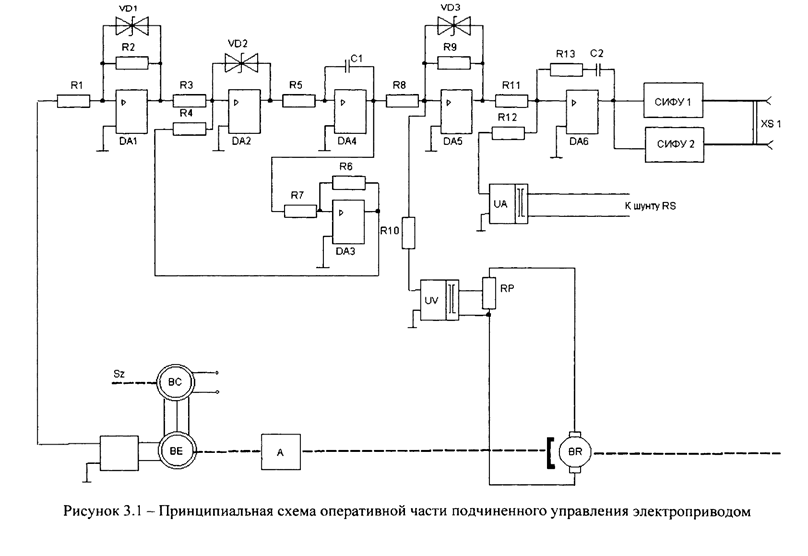
Из структурных схем отдельных регуляторов составляем общую структурную схему системы подчиненного регулирования. На рисунке 3.1 представлена функциональная схема системы подчиненного регулирования.
На рисунке 3.2 представлена структурная схема системы подчиненного регулирования.
      Рисунок 3.2 — структурная схема системы подчиненного регулирования Рисунок 3.2 — структурная схема системы подчиненного регулирования
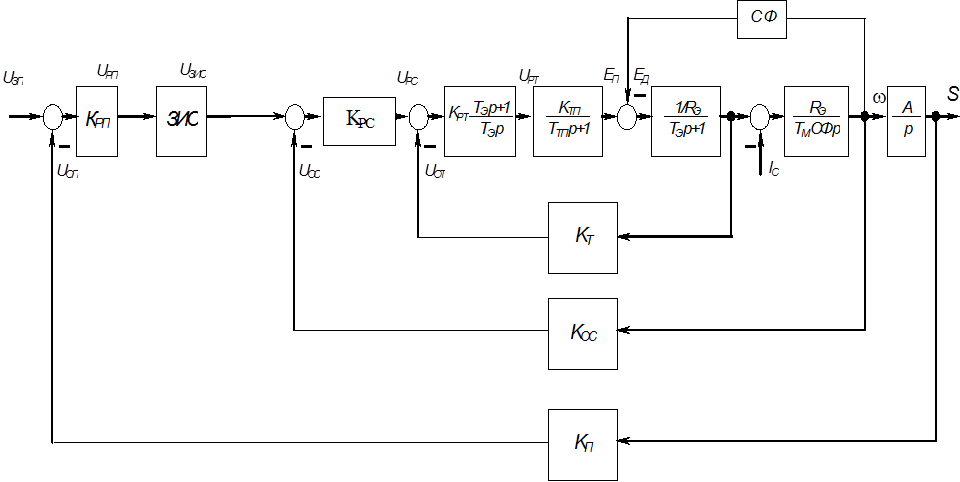
 Структурная схема в динамике изображена на рисунке 4.1. Структурная схема в динамике изображена на рисунке 4.1.
Рисунок 4.1 — структурная схема в динамике  

   

Расчет статических характеристик проведем следующим методом. Подставим р = 0, в результате чего получим структуру в статике (см. рисунок 4.2).
 

   При условии, что IП
= 1.5IH
, то передаточная функция будет иметь вид: При условии, что IП
= 1.5IH
, то передаточная функция будет иметь вид:
Рисунок 4.2 — структурная схема в статике
 . .
Коэффициент ошибки:

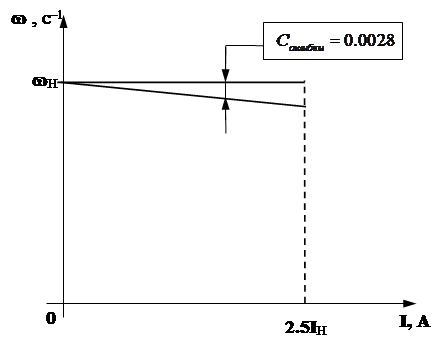
При условии, что IП
= 2.5IH
, размыкается обратная связь по скорости, так как регулятор скорости войдет в насыщение, ограничивая рабочий ток.
Статическая характеристика изображена на рисунке 4.3.
Рисунок 4.3
Статическая характеристика системы автоматического управления
5.
Расчет динамических характеристик системы
Расчет переходных процессов можно получить в результате математического моделирования системы.
Математическое моделирование системы проводим с использованием пакета прикладных программ Matlab. Структурная схема математической модели приведена на рисунке 5.1.
Переходные процессы, полученные в результате математического моделирования системы, приведены на рисунках
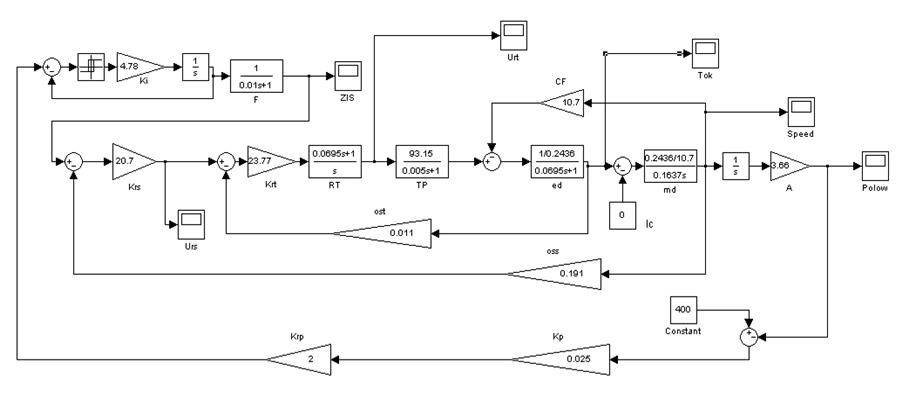
Рисунок 5.1 – Схема математической модели.
| Рисунок 5. 1 — Структурная схема математической модели |
|
1. Вибір елементів реверсивних тиристорних перетворювачів електроприводів постійного струму/ В.Т. Пiлецький. – К.: IСДО, 1994. – 148 с.
2. Андреев В.П. И Сабенин Ю.А. Основы электропривода. – М., Госэнергоиздат, 1963, 772 с.
3. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. – М., Энергоиздат, 1981. – 576 с.
4. Зеленов А.Б. Выбор мощности электропривода механизмов прокатных станов. – Киев: УМК ВО, 1990. – 220 с.
5. Соколов Н.Г. Основы конструирования электроприводов. – М., «Энергия», 1971. – 256 с.
6. Справочник по электрическим машинам. Том 2, под редакцией И. П. Копылова, — М., Энергатомиздад, 1989 , — 688 с.
7. Справочные данные по электрооборудованию, каталоги и информационные листы в методическом кабинете кафедры АЭМС.
|