Предмет: Теория Автоматического Управления
Тема: Построение структурных схем систем автоматического управления
Введение
Структурной схемой системы называется графическое изображение показывающее, из каких элементов состоит система, и каким образом они соединены между собой.
Структурная схема отражает динамические свойства системы и является ее математической моделью.
В соответствии со структурной схемой всегда можно записать передаточную функцию системы и ее дифференциальное уравнение.
Основы структурного метода
Основными элементами структурной схемы являются:
1. Динамические звенья направленного действия.
Звенья изображаются прямоугольниками, в которые записываются операторы преобразования сигналов. В звеньях направленного действия сигнал с входа передается на выход. При изменении входного сигнала изменяется выходной, при изменении выходного сигнала входной не изменяется. При соединении звеньев направленного действия их динамические свойства не изменяются.
2. Связи, которые обозначаются линиями со стрелками, указывающими направление передачи сигналов. Различают прямые и обратные связи.
3. Сумматоры, в которых суммируются или вычитаются сигналы.
4. Узлы разветвления, обозначаемые точками, в которых сигналы расходятся на два или несколько направлений.
На структурных схемах все воздействия описываются в изображениях.
В структурных схемах используются следующие виды соединений:
- последовательное;
- параллельное – согласованное;
- параллельное – встречное.
Последовательное соединение – это соединение, в котором выходная величина предыдущего звена является входной для последующего.
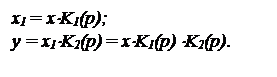
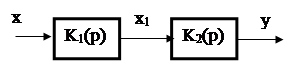
Рис. 1
Передаточная функция последовательного соединения равна произведению передаточных функций этих звеньев
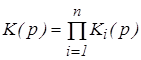 (1) (1)
Параллельное - согласованное соединение – это соединение, в котором входная величина является общей для всех звеньев, а выходная равна сумме выходов каждого звена (рис. 2).
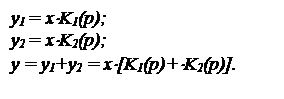
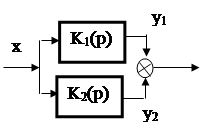
Рис. 2
Передаточная функция параллельного – согласованного соединения равна сумме передаточных функций этих звеньев
 (2) (2)
Параллельное-встречное соединение – это соединение, в котором выходная величина обратно подается на его вход через другое звено. Такое соединение называется соединением с обратной связью (рис. 3).
Обратная связь – ОС может быть положительной(если знак входного сигнала и сигнала ОС совпадают) и отрицательной (если они противоположны по знаку).
На практике широко используется отрицательная обратная связь (ООС) для устойчивой работы системы.
Реклама

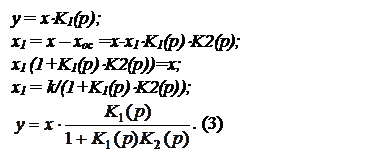 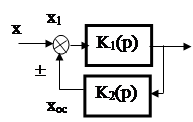 Рис. 3
Запись передаточных функций замкнутых систем
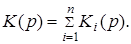
Рассмотрим соединение c обратной связью (рис. 4).
Главная ветвь – это ветвь, включающая звенья между входом и выходом. Главный контур – это контур, охватывающий все звенья.
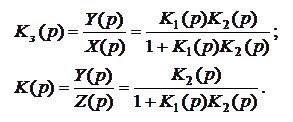 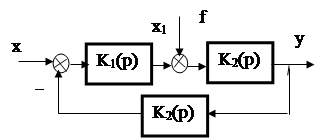
Рис. 4
Рассмотрим соединение c единичной обратной связью (рис. 5).
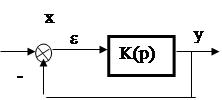 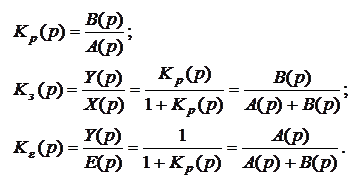
Рис. 5
Преобразование структурных схем
В общем случае система может быть многоконтурной. Любую многоконтурную систему можно свести к одноконтурной системе, выполнив структурные преобразования.
Рассмотрим правила преобразования структурных схем.
Перенос сумматора с входа звена на выход (рис. 6)
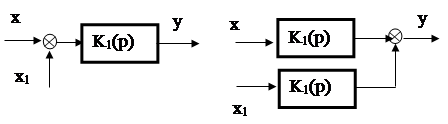
Рис. 6
Перенос сумматора с выхода звена навход (рис. 7)
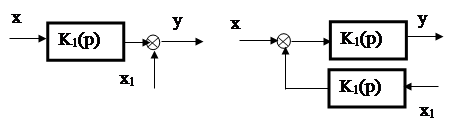
Рис. 7
Перенос узла с входа звена навыход (рис. 8)
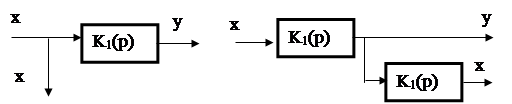
Рис. 8
Перенос узла с выхода звена на вход (рис. 9)
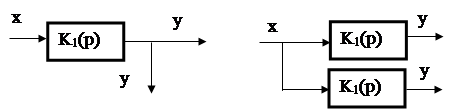
Рис. 9
Рекомендация: при преобразовании структурных схем необходимо “тянуть” узел к узлу сумматор к сумматору.
Пример 1. Выполнить преобразование структурной схемы и записать передаточную функцию замкнутой системы(рис. 10).
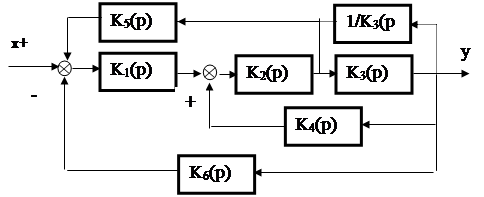
Рис. 10
С учетом
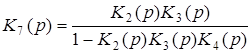
схему можно представить в виде рис. 11.
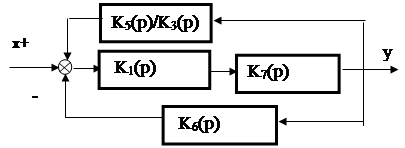
Рис. 11
Далее схему можно представить в виде (рис. 12)
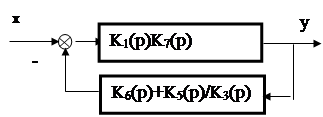
Рис. 12
Передаточная функция замкнутой системы равна:

Литература
1. Бесекерский В.А., Попов Е.П. "Теория систем автоматического управления". Профессия, 2003 г. - 752с.
2. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1975. - 468с.
3. Основы теории автоматического управления / В.С. Булыгин, Ю.С. Гришанин, Н.Б. Судзиловский и др.; под ред. Н.Б. Судзиловского. М.: Машиностроение, 1985. - 512с.
4. Попов Е.П. Теория линейных систем автоматического регулирования и управления. М.: Наука, 1976. - 256с.
5. Попов Е.П. Теория нелинейных систем. М.: Наука, 1979. - 255с.
6. Справочник по теории автоматического управления. /Под ред. А.А. Красовского- М.: Наука, 1987. - 712с.
7. Цыпкин Я.З. Теория линейных импульсных систем. М.: Наука, 1977. - 270с.
|
