Конспект лекций по предмету
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Для студентов специальности:
260501.65 Технология продуктов общественного питания,
форма обучения - очная
Конспект лекций составлен на основе:
1. Буторин Л.В., Бусыгина Е.Б. Теоретическая механика. Учебно-практическое пособие. – М., МГУ ТУ, 2004
2. Тарг С.М. Краткий курс теоретической механики. – М.: Высшая школа, 2001г. - с.
3. Яблонский А.А., Никифорова В.Н. Курс теоретической механики. М. “Лань”, 2000г.
Введение
Современные промышленные производства, в том числе пищевые, являются высокомеханизированными производствами. На технологическое оборудование возлагается решение все более сложных задач, что в свою очередь ведет к усложнению оборудования. Формирование современного инженера немыслимо без знания фундаментальных дисциплин. Одной из таких дисциплин является теоретическая механика
.
Теоретическая механика – раздел механики, в котором излагаются основные законы механического движения и механического взаимодействия материальных тел.Механическим движением
называется изменение с течением времени взаимного положения в пространстве материальных тел, механическим
взаимодействием
– такое взаимодействие, в результате которого изменяется механическое движение или изменяется взаимное положение частей тела.
Теоретическую механику принято делить на: статику, кинематику и динамику
.
В статике изучаются условия равновесия
материальных тел и методы тождественного преобразования системы сил. Равновесие
– это состояние, при котором тело при действии сил остается неподвижным или движется равномерно прямолинейно.
В кинематике рассматриваются общие геометрические характеристики движения тел. Действующие на тело силы не рассматриваются. Закон движения задается. Закон движения тела
– это зависимость положения тела в пространстве от времени.
В динамике изучают общие законы движения тел под действием сил.
1.
C
татика твердого тела
1.1 Основные понятия статики
Абсолютно твердое тело (твердое тело, тело)
– материальное тело, расстояние между любыми точками в котором не изменяется. Следствие размеры и форма тела не изменяются.
Материальная точка
– тело, размерами которого по условиям задачи можно пренебречь.
Реклама

Свободное тело
– тело, на перемещение которого не наложено никаких ограничений.
Несвободное (связанное) тело
– тело, на перемещение которого наложены ограничения.
Связи
– тела, препятствующие перемещению рассматриваемого объекта (тела или системы тел).
Механическая система
– совокупность взаимосвязанных между собой тел или материальных точек.
Твердое тело можно рассматривать как механическую систему, положения и расстояние между точками которой не изменяются.
Сила
– векторная величина, характеризующая механическое действие одного материального тела на другое.
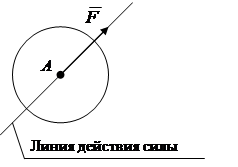
Сила как вектор характеризуется точкой приложения, направлением действия и абсолютным значением (рис.1.1). Единица измерения модуля силы – Ньютон.
Рис.1.1. Рис.1.2.
Линия действия силы
– прямая, вдоль которой направлен вектор силы.
Сосредоточенная сила
– сила, приложенная в одной точке.
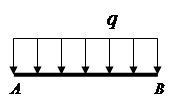
Распределенные силы (распределенная нагрузка)
– силы, действующие на все точки объема, поверхности или длины тела (рис.1.2).
Распределенная нагрузка задается силой, действующей на единицу объема (поверхности, длины).Размерность распределенной нагрузки – Н/м3
(Н/м2
, Н/м).
Внешняя сила
– сила, действующая со стороны тела, не принадлежащего рассматриваемой механической системе.
Внутренняя сила
– сила, действующая на материальную точку механической системы со стороны другой материальной точки, принадлежащей рассматриваемой системе.
Система сил
– совокупность сил, действующих на механическую систему.
Плоская система сил
– система сил, линии действия которых лежат в одной плоскости.
Пространственная система сил
– система сил, линии действия которых не лежат в одной плоскости.
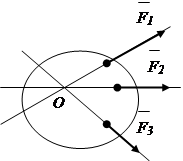
Система сходящихся сил
– система сил, линии действия которых пересекаются в одной точке (рис.1.3).
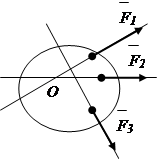
Произвольная система сил
– система сил, линии действия которых не пересекаются в одной точке.(рис.1.4)
Рис.1.3 Рис.1.4
Эквивалентные системы сил
– такие системы сил, замена которых одна на другую не изменяет механического состояния тела. Принятое обозначение:

 Уравновешенная система сил
– система сил, которая будучи приложена к свободному твердому телу не изменяет его механического состояния (не выводит из равновесия). Уравновешенная система сил
– система сил, которая будучи приложена к свободному твердому телу не изменяет его механического состояния (не выводит из равновесия).
Равнодействующая сила
– сила, действие которой на тело эквивалентно действию системы сил.
Момент силы
– величина, характеризующая вращающую способность силы.
Пара сил
– система двух параллельных равных по модулю противоположно направленных сил. Принятое обозначение – ( ).Под действием пары сил тело будет совершать вращательное движение. ).Под действием пары сил тело будет совершать вращательное движение.
Реклама

Проекция силы на ось
– отрезок, заключенный между перпендикулярами, проведенными из начала и конца вектора силы к этой оси (рис.1.5 ).
Проекция положительна, если направление отрезка совпадает с положительным направлением оси.
Проекция силы на плоскость
– вектор на плоскости, заключенный между перпендикулярами, проведенными из начала и конца вектора силы к этой плоскости (рис.1.6).
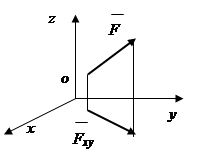
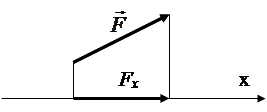
Рис.1.5 Рис.1.6
1.2. Аксиомы статики
В основе теоретических положений статики лежит ряд аксиом. Аксиома, это закон, сформулированный в результате обобщения результатов наблюдений.
1.
Аксиома равновесия.
Две силы, действующие на твердое тело, уравновешиваются только в том случае, если они равны по модулю и действуют вдоль одной прямой в противоположные стороны (рис.1.7).
 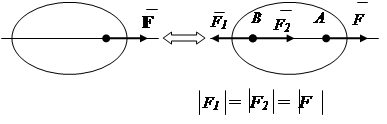
Рис.1.7 Рис.1.8
2.
Аксиома присоединения ( исключения) уравновешенной системы сил.
Действие системы сил на твердое тело не изменится, если к ней присоединить или исключить из нее уравновешенную систему сил (рис 1.8).
3.
Аксиома о параллелограмме сил.
Система двух сил, приложенных в одной точке твердого тела, имеет равнодействующую, приложенную в той же точке. Вектор равнодействующей является диагональю параллелограмма, построенного на этих силах (рис.1.9).
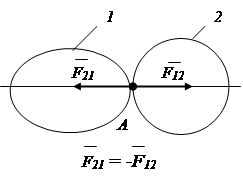 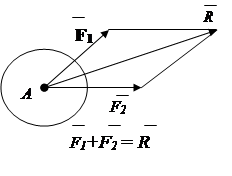
Рис. 1.9 Рис.1.10
4.Аксиома противодействия.
При действии одного твердого тела на другое возникает сила противодействия, равная по модулю, противоположно направленная действующей силе (рис.1.10).
Примечание. Силу, действие которой задано, называют активной силой
, силу противодействия называют реакцией
.
5.Аксиома связей.
Всякое несвободное тело можно рассматривать как свободное, если его мысленно освободить от связей, заменив их действие соответствующими реакциями.
1.3 Связи и их реакции
Тела, препятствующие перемещению рассматриваемого объекта, будем называть связями. Сила, с которой связь действует на рассматриваемый объект, называется реакцией связи
. При определении возможных реакций связи следует исходить из того, что реакция это сила, препятствующая перемещению рассматриваемого тела. Реакция направлена в сторону, противоположную той, куда связь не позволяет перемещаться телу.
Рассмотрим некоторые часто встречающиеся связи .
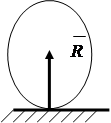
Гладкая поверхность
ограничивает перемещение по нормали к поверхности опоры. Реакция направлена перпендикулярно поверхности (рис.1.11).
Шарнирная подвижная опора
ограничивает перемещение тела по нормали к опорной плоскости. Реакция направлена по нормали к поверхности опоры (рис.1.12)
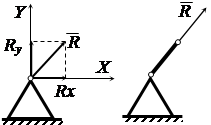
Шарнирная неподвижная опора
противодействует любому перемещению в плоскости ,перпендикулярной оси вращения. При расчетах реакцию Fr, как правило, представляют в виде двух составляющих по осям X и Y (рис.1.13).
Шарнирный невесомый стержень
противодействует перемещению тела вдоль линии стержня. Реакция будет направлена вдоль линии стержня (рис.1.14).
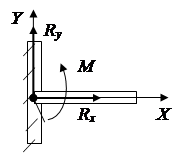
Глухая заделка
противодействует любому перемещению и вращению в плоскости (рис.1.15). Ее действие можно заменить силой, представленной в виде двух составляющих и парой сил с моментом.

 Рис.1.11 Рис. 1.12 Рис.1.13 Рис.1.14 Рис.1.15
1.4 Момент силы относительно точки
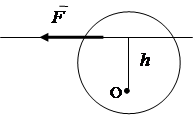
Под действием силы твердое тело наряду с поступательным движением может совершать вращение вокруг того или иного центра. Вращательная способность силы характеризуется моментом силы. Вращательный эффект силы зависит от модуля силы, расстояния от центра до линии действия силы, направления поворота в плоскости вращения.
Абсолютное значение момента равно произведению модуля силы  на кратчайшее расстояние h
от центра вращения до линии действия силы. Расстояние h
называют плечом силы (рис.1.16). на кратчайшее расстояние h
от центра вращения до линии действия силы. Расстояние h
называют плечом силы (рис.1.16).
М0
() = F×h
, ( 1.1)
Момент считают положительным, если сила стремится вращать плечо h
против хода часовой стрелки и отрицательным при вращении по ходу часовой стрелки.
Свойства момента силы относительно точки:
1. Момент силы не изменится при переносе точки приложения силы вдоль линии действия силы.
2. Момент силы равен нулю, если линия действия силы проходит через точку приложения силы.
3. Момент равнодействующей силы относительно точки равен сумме моментов слагаемых сил относительно этой точки.
 где где  (1.2) (1.2)
Рис.1.16.
Рис.1.17.
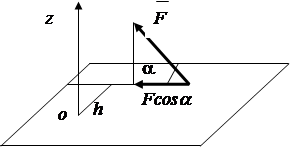
1.5. Момент силы относительно оси
Моментом силы относительно оси называется момент проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью.
Момент считается положительным, если с положительного конца оси поворот, который сила стремится совершить, виден происходящим против хода часовой стрелки, и отрицательным – если по ходу часовой стрелки.
 . (1.3) . (1.3)
Чтобы найти момент силы относительно оси, нужно (рис 1.17);
1. Провести плоскость перпендикулярную оси z.
2. Спроецировать силу  на эту плоскость и вычислить величину проекции на эту плоскость и вычислить величину проекции  . .
3. Провести плечо h
из точки пересечения оси с плоскостью на линию действия проекции силы и вычислить его длину.
4. Найти произведение этого плеча и проекции силы с соответствующим знаком /
Свойства момента силы относительно оси
Момент силы относительно оси равен нулю, если:
1.  , т.е. сила параллельна оси. , т.е. сила параллельна оси.
2. h
=0
, т.е. линия действия силы пересекает ось.
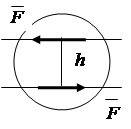
1.6. Момент пары сил
Пара сил оказывает на тело вращающее действие. Момент пары сил равен произведению одной силы на кратчайшее расстояние между линиями действия сил пары, которое называется плечом пары (рис.1.18)
 , (1.4) , (1.4)
где:  -силы, составляющие пару; -силы, составляющие пару;
h
- плечо пары
Рис.1.18.
Момент пары считают положительным, если силы стремятся вращать плечо  против хода часовой стрелки. против хода часовой стрелки.
Свойства пары сил
1. Сумма проекций сил пары на любую ось равна нулю.
2. Не изменяя момента пары можно одновременно соответственно изменять значение сил и плечо пары.
3. Пару можно переносить в плоскости ее действия при этом действие пары на тело не изменится.
1.7. Тождественное преобразование систем сил
Преобразование может быть выполнено графическим или аналитическим способом.
1.7.1. Преобразование сходящейся системы сил
 Равнодействующая R
двух сходящихся сил Равнодействующая R
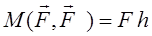
двух сходящихся сил  находится на основании аксиомы о параллелограмме сил. (рис.1.9). Геометрическая сумма любого числа сходящихся сил может быть определена путем последовательного сложения двух сил (рис.1.19) – способ векторного многоугольника. находится на основании аксиомы о параллелограмме сил. (рис.1.9). Геометрическая сумма любого числа сходящихся сил может быть определена путем последовательного сложения двух сил (рис.1.19) – способ векторного многоугольника.
Вывод: система сходящихся сил ( n
) приводится к одной равнодействующей силе
n
) приводится к одной равнодействующей силе
 .
.
Рис.1.19 Рис.1.20. Рис.1.21.
Аналитически равнодействующая сила может быть определена через ее проекции на оси координат
 , (1.5 ) , (1.5 )
Согласно теореме: проекция равнодействующей на ось равна сумме проекций слагаемых сил на эту ось (рис.1.20).
Rx
=
F
1
x
+
F
2
x
+
F
3
x
, или в общем виде
Rx
= åFkx
(1.6)
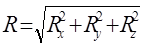
С учетом (1.6) равнодействующая определяется выражением
 , (1.7) , (1.7)
Направление вектора равнодействующей определяется косинусами углов между вектором  и осями x
, y, z
(рис.1.20) и осями x
, y, z
(рис.1.20)
 где где 
1.7.2. Преобразование произвольной системы сил
.
Применить правило параллелограмма сил непосредственно к произвольной системе сил нельзя, так как линии действия сил не пересекаются в одной точке. Предварительно систему сил приводят к одному центру на основании теоремы о параллельном переносе силы.
Теорема: силу, приложенную к твердому телу, можно, не изменяя оказываемого ею действия, перенести параллельно в другую точку тела, прибавляя при этом пару сил с моментом, равным моменту переносимой силы относительно точки, в которую она переносится (рис.1.22).
В результате указанного преобразования получается сходящаяся система сил и сумма моментов пар сил. Действие сходящейся системы сил заменяют действием суммарной силы, действие моментов - суммарным моментом. Суммарный вектор *
называют главным вектором
системы сил, суммарный момент  * *
 - главным моментом
системы сил.
- главным моментом
системы сил.
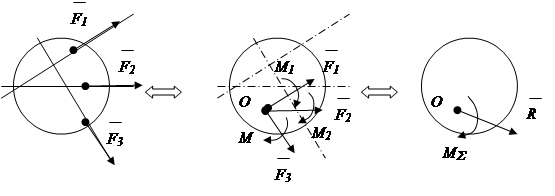
Рис.1.22
Вывод: произвольная система сил в результате тождественного преобразования приводится к главному вектору
*
и главному моменту
*
системы сил.
Аналитически главный вектор и главный момент системы сил могут быть определены через их проекции на оси координат
 , ( 1.8 ) , ( 1.8 )
 . (1.9) . (1.9)
1.8 Условия равновесия систем сил
1.8.1. Равновесие системы сходящихся сил
По определению (см.п.1.1) действие системы сходящихся сил эквивалентно действию одной равнодействующей силы  . Для равновесия тела необходимо и достаточно, чтобы равнодействующая равнялась нулю . Для равновесия тела необходимо и достаточно, чтобы равнодействующая равнялась нулю  = 0. = 0.
Из формулы (1.7) следует, что для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы сумма проекций всех сил на оси X,Y,Zравнялась нулю

åFkx
= 0
åFky
= 0 ( 1.10) åFk
z
= 0
Для равновесия плоской сходящейся системы сил необходимо и достаточно, чтобы сумма проекций всех сил на оси X,Yравнялась нулю
 åFkx
= 0 åFkx
= 0
åFky
= 0 ( 1.11 )
1.8.2. Равновесие произвольной системы сил.
Действие произвольной системы сил эквивалентно действию главного вектора и главного момента. Для равновесия необходимо и достаточно выполнения условия
 *
= 0 (1.12 ) *
= 0 (1.12 )
*
= 0
Для равновесия произвольной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на оси X,Y,Z и суммы моментов всех сил относительно осей X,Y,Z равнялись нулю.
 åFkx
= 0 åFkx
= 0
åFky
= 0
åFkz
= 0 (1.13)
åМх
(k
) = 0
åМ
y
(k
) = 0
åМ
z
(k
) = 0
Для равновесия плоской произвольной системы сил необходимо и достаточно, чтобы сумма проекций главного вектора на оси X,Y, и алгебраическая сумма моментов сил относительно центра О были равны нулю.
 åFkx
= 0 åFkx
= 0
åFky
= 0 (1.14)
åМо
(k
) = 0
1.9. Вопросы для самоконтроля по разделу
1. Дайте определение абсолютно твердого тела, материальной точки, силы, линии действия силы, системы сил (плоской, пространственной, сходящейся) произвольной систем сил.
2. Что называется проекцией силы на ось, на плоскость?
3. Что называется моментом силы, как определяется момент силы относительно точки?
4. Изменяется ли момент силы относительно данной точки при переносе силы вдоль линии ее действия?
5. В каком случае момент силы относительно данной точки равен нулю?
6. Какая система сил называется парой сил, чему равен момент пары сил?
7. Что называют связью? В чем заключается принцип освобождения от связей? Перечислите основные типы связей, покажите их реакции.
8. Каковы условия и уравнения равновесия системы сходящихся и произвольной систем сил, расположенных в пространстве и в плоскости?
9. Сформулируйте порядок решения задач статики.
2. Кинематика
Кинематика
- раздел теоретической механики, в котором рассматриваются общие геометрические свойства механического движения, как процесса, происходящего в пространстве и во времени. Движущиеся объекты рассматривают как геометрические точки или геометрические тела. Соответственно, изучение делят на кинематику точки и кинематику твердого тел
2.1 Основные понятия кинематики
Закон движения точки (тела)
– зависимость положения точки (тела) в пространстве от времени.
Траектория точки
– геометрическое место положений точки в пространстве при ее движении.
Скорость точки (тела)
– характеристика изменения во времени положения точки (тела) в пространстве.
Ускорение точки (тела)
– характеристика изменения во времени скорости точки (тела)
2.2. Кинематика точки
2.2.1 Способы задания движения точки
Задать движение точки - значит задать изменение ее положения по отношению к выбранной системе отсчета. Существует три основных систем отсчета: векторная, координатная, естественная
. Соответственно возможны три способа задания движения точки.
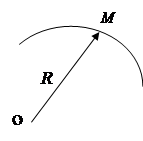
В векторной системе положение точки относительно начала отсчета задается радиус-вектором  (рис.2.1). Закон движения (рис.2.1). Закон движения 
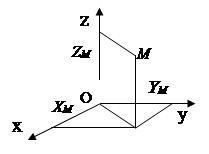
Положение точки в системе координат OXYZ задается тремя координатами X,Y,Z (рис.2.2). Закон движения – x
=
x
(
t
),
y
=
y
(
t
),
z
=
z
(
t
).
Положение точки в естественной системе отсчета задается расстоянием S
от начала отсчета до этой точки вдоль траектории (рис.2.3). Закон движения – s
=
s
(
t
).
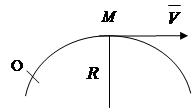
Рис.2.1
Рис. 2.2
Рис.2.3
Движение точки при естественном способе задания движения определено если известны:
1.Траектория движения.
2.Начало и направление отсчета дуговой координаты.
3.Уравнение движения.
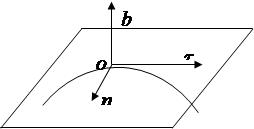
При естественном способе задания движения, в отличии от других способов, используются подвижные координатные оси, движущиеся вместе с точкой по траектории. Такими осями являются (рис. 2.4).
Касательная ( ) – направлена в сторону возрастания дуговой координаты по касательной к траектории. ) – направлена в сторону возрастания дуговой координаты по касательной к траектории.
Главная нормаль (п
) – направлена в сторону вогнутости кривой.
Бинормаль (в
) – направлена перпендикулярно к осям t , n.
Рис. 2.4
2.2.2 Определение кинематических характеристик точки
Траектория точки
В векторной системе отсчета траектория описывается выражением 
В координатной системе отсчета траектория определяется по закону движения точки и описывается выражениями z
=
f
(
x
,
y
)
- в пространстве, или y = f(x ) – в плоскости.
В естественной системе отсчета траектория задается заранее.
Скорость точки
Согласно определению (см. п. 2.1) скорость характеризует изменение во времени положения точки (тела) в пространстве.
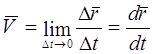
Определение скорости точки в векторной системе координат
При задании движения точки в векторной системе координат отношение перемещения к интервалу времени  называют средним значением скорости на этом интервале времени называют средним значением скорости на этом интервале времени  . .
Принимая интервал времени бесконечно малой величиной, получают значение скорости в данный момент времени (мгновенное значение скорости)
 (2.1) (2.1)
Вектор средней скорости  направлен вдоль вектора направлен вдоль вектора  в сторону движения точки, вектор мгновенной скорости в сторону движения точки, вектор мгновенной скорости  направлен по касательной к траектории в сторону движения точки (рис.2.5). направлен по касательной к траектории в сторону движения точки (рис.2.5).
Рис.2.5
Вывод: скорость точки – векторная величина, равная производной от закона движения по времени.
Отметим и используем в дальнейших рассуждениях следующее свойство производной: производная от какой либо величины по времени определяет скорость изменения этой величины.
Определение скорости точки в координатной системе отсчета
На основании свойства производной определим скорости изменения координат точки
   (2.2) (2.2)
Модуль полной скорости точки при прямоугольной системе координат будет равен
 (2.3) (2.3)
Направление вектора скорости определяется косинусами направляющих углов

где  - углы между вектором скорости и осями координат. - углы между вектором скорости и осями координат.
Определение скорости точки в естественной системе отсчета
Скорость точки в естественной системе отсчета определяется как производная от закона движения точки
V
= (2.4) (2.4)
Согласно предыдущим выводам вектор скорости направлен по касательной к траектории в сторону движения точки и в осях  nb
определяется только одной проекцией nb
определяется только одной проекцией  . .
Ускорение точки
По определению ускорение характеризует изменение скорости, т.е. скорость изменения скорости.
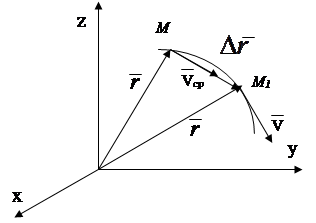
Ускорения точки в векторной системе отсчета
На основании свойства производной
 , (2.5 ) , (2.5 )
Вектор скорости может изменяться по модулю и направлению. Для определения приращения вектора  совместим начала векторов совместим начала векторов  (рис.2.6). Вектор ускорения направлен по линии приращения вектора скорости, т. е. В сторону искривления траектории. (рис.2.6). Вектор ускорения направлен по линии приращения вектора скорости, т. е. В сторону искривления траектории.
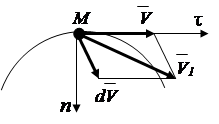
Рис.2.6
Ускорение точки в координатной системе отсчета
Ускорение изменения координат точки равно производной по времени от скоростей изменения этих координат
ax
= ; ay
= ; ay
= ; az
= ; az
= . .
Полное ускорение в прямоугольной системе координат будет определяться выражением
а
=  , (2.6) , (2.6)
Направляющие косинусы вектора ускорения
 . .
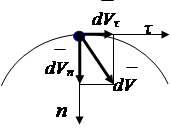
Ускорение точки в естественной системе отсчета
Приращение вектора скорости (рис.2.7) можно разложить на составляющие, параллельные осям естественной системы координат (рис.2.7) можно разложить на составляющие, параллельные осям естественной системы координат
 , (2.7) , (2.7)
Разделив левую и правую части равенства (2.7 ) на dt
, получим,
 , (2.8) , (2.8)
где:  - тангенциальное ускорение, (2.9) - тангенциальное ускорение, (2.9)
 - нормальное ускорение, (вывод см .[1], п.43) - нормальное ускорение, (вывод см .[1], п.43)
где R - радиус кривизны траектории в окрестности точки
Рис. 2.7
2.3. Кинематика твердого тела
В отличие от кинематики точки в кинематике твердых тел решаются две основные задачи:
- задание движения и определение кинематических характеристик тела в целом;
- определение кинематических характеристик точек тела.
Способы задания и определения кинематических характеристик зависят от типов движения тел.
В настоящем пособии рассматриваются три типа движения: поступательное, вращательное вокруг неподвижной оси и плоско-параллельное движение твердого тела
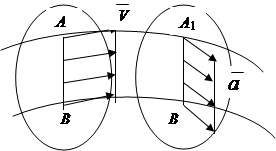
2.3.1. Поступательное движение твердого тела
Поступательным называют движение, при котором прямая, проведенная через две точки тела, остается параллельной ее первоначальному положению (рис.2.8).
Доказана теорема: при поступательном движении все точки тела движутся по одинаковым траекториям и имеют в каждой момент времени одинаковые по модулю и направлению скорости и ускорения (рис.2.8).
Вывод: Поступательное движение твердого тела определяется движением любой его точки, в связи с чем, задание и изучение его движения сводится к кинематике точки.
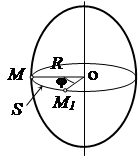
Рис. 2.8 Рис. 2.9
2.3.2 Вращательное движение твердого тела вокруг неподвижной оси.
Вращательным вокруг неподвижной оси называют движение твердого тела, при котором две точки, принадлежащие телу, остаются неподвижными в течение всего времени движения.
Положение тела определяется углом поворота j (рис.2.9 ). Единица измерения угла – радиан. (Радиан - центральный угол окружности, длина дуги которого равна радиусу, полный угол окружности содержит 2p радиана.)
Закон вращательного движения тела вокруг неподвижной оси j = j(t). Угловую скорость и угловое ускорение тела определим методом дифференцирования
 - угловая скорость, рад/с; (2.10) - угловая скорость, рад/с; (2.10)
 - угловое ускорение, рад/с2
(2.11) - угловое ускорение, рад/с2
(2.11)
При вращательном движении тела вокруг неподвижной оси его точки, не лежащие на оси вращения, движутся по окружностям с центром на оси вращения.
Если рассечь тело плоскостью перпендикулярной оси, выбрать на оси вращения точку С
и произвольную точка М,
то точка М
будет описывать вокруг точки С
окружность радиуса R
(рис. 2.9). За время dt
происходит элементарный поворот на угол  , при этом точка М
совершит перемещение вдоль траектории на расстояние , при этом точка М
совершит перемещение вдоль траектории на расстояние  .Определим модуль линейной скорости: .Определим модуль линейной скорости:
 ( 2.12 ) ( 2.12 )
Ускорение точки М
при известной траектории определяется по его составляющим, см.(2.8)
 , ,
где:  ; ;  . .
Подставляя в формулы выражение (2.12) получим:
 , . , . , (2.13) , (2.13)
где:  - тангенциальное ускорение, - тангенциальное ускорение,
 -нормальное ускорение. -нормальное ускорение.
2.3.3. Плоско - параллельное движение твердого тела
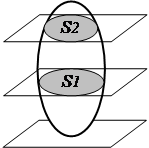
Плоскопараллельным называется движение твердого тела, при котором все его точки перемещаются в плоскостях, параллельных одной неподвижной плоскости (рис.2.10). Для изучения движения тела достаточно изучить движение одного сечения S
этого тела плоскостью, параллельной неподвижной плоскости. Движение сечения S
в своей плоскости можно рассматривать как сложное, состоящее из двух элементарных движений: а) поступательного и вращательного; б) вращательного относительно подвижного (мгновенного) центра.
В первом варианте
движение сечения может быть задано уравнениями движения одной его точки (полюса) и вращением сечения вокруг полюса (рис.2.11). В качестве полюса может быть принята любая точка сечения.
Рис. 2.10 Рис. 2.11
Уравнения движения запишутся в виде:
 Х
А
= ХА
(
t
) Х
А
= ХА
(
t
)
Y
А
=
Y
А
(
t
)
( 2.14 )
j
А
=
j
А
(
t
)
Кинематические характеристики полюса определяют из уравнений его движения.
Скорость любой точки плоской фигуры, движущейся в своей плоскости слагается из скорости полюса (произвольно выбранной в сечении точки А
) и скорости вращательного движения вокруг полюса (вращение точки В
вокруг точки А
).
Ускорение точки движущейся плоской фигуры складывается из ускорения полюса относительно неподвижной системы отсчета и ускорения за счет вращательного движения вокруг полюса.
 (2.15 ) (2.15 )
 (2.16 ) (2.16 )
Во втором варианте
движение сечения рассматривается как вращательное вокруг подвижного (мгновенного) центра P
(рис.1.12). В этом случае скорость любой точки В сечения будет определяться по формуле для вращательного движения
 (2.17 ) (2.17 )
Угловая скорость вокруг мгновенного центра Р
может быть определена если известна скорость какой либо точки сечения, например точки А.
 (2.18) (2.18)
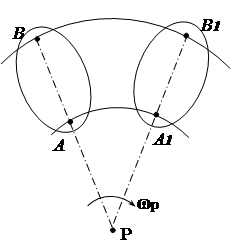
Рис.2.12
Положение мгновенного центра вращения может быть определено на основании следующих свойств:
- вектор скорости точки перпендикулярен радиусу;
- модуль скорости точки пропорционален расстоянию от точки до центра вращения ( V
=
w
∙
R
) ;
- скорость в центре вращения равна нулю.
Рассмотрим некоторые случаи определения положения мгновенного центра.
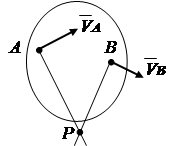
1. Известны направления скоростей двух точек плоской фигуры (рис.2.13). Проведем линии радиусов. Мгновенный центр вращения Р
находится на пересечении перпендикуляров, проведенных к векторам скоростей.
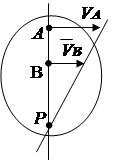
2. Скорости точек А и В известны, причем вектора  и и  параллельны друг другу, а линия АВ
перпендикулярна (рис. 2. 14). В этом случае мгновенный центр вращения лежит на линии АВ
. Для его нахождения проведем линию пропорциональности скоростей на основании зависимости V
=
w
R
. параллельны друг другу, а линия АВ
перпендикулярна (рис. 2. 14). В этом случае мгновенный центр вращения лежит на линии АВ
. Для его нахождения проведем линию пропорциональности скоростей на основании зависимости V
=
w
R
.
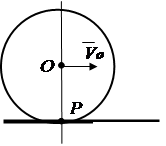
3. Тело катится без скольжения по неподвижной поверхности другого тела (рис.2.15). Точка касания тел в данный момент имеет нулевую скорость в то время, как скорости других точек тела не равны нулю. Точка касания Р
будет мгновенным центром вращения.
Рис. 2.13
Рис. 2.14
Рис. 2.15
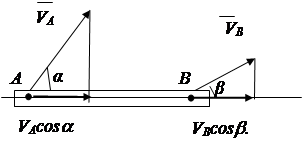
Кроме рассмотренных вариантов скорость точки сечения может быть определена на основании теоремы о проекциях скоростей двух точек твердого тела.
Теорема: проекции скоростей двух точек твердого тела на прямую, проведенную через эти точки, равны между собой и одинаково направлены
.
Доказательство: расстояние АВ
изменяться не может, следовательно,
V
А
cosa не может быть больше или меньше V
В
cosb (рис.2.16 ).
Рис. 2.16
Вывод:
V
А
cosa=V
В
cosb. (2.19 )
2.4. Сложное движение точки
В предыдущих параграфах рассматривалось движение точки относительно неподвижной системы отсчета, так называемое абсолютное движение. В практике встречаются задачи, в которых известно движение точки относительно системы координат, которая движется относительно неподвижной системы. При этом требуется определить кинематические характеристики точки относительно неподвижной системы.
Принято называть: движение точки относительно подвижной системы – относительным
, движение точки вместе с подвижной системой – переносным
, движение точки относительно неподвижной системы – абсолютным
. Соответственно называют скорости и ускорения:
 -относительные; -относительные; - переносные; - переносные;  -абсолютные. -абсолютные.
Согласно теореме о сложении скоростей абсолютная скорость точки равна векторной сумме относительной и переносной скоростей (рис.).
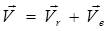 , (2.20) , (2.20)
Абсолютное значение скорости определяется по теореме косинусов
 , (2.21) , (2.21)
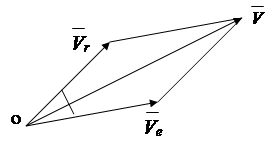
Рис.2.17
Ускорение по правилу параллелограмма определяется только при поступательном переносном движении

 , (2.22) , (2.22)
При непоступательном переносном движении появляется третья составляющая ускорения, называемое поворотным или кориолисовым.
 , (2.23) , (2.23)
где 
Кориолисово ускорение численно равно
 , ,
где a – угол между векторами  и и 
Направление вектора кориолисова ускорения удобно определять по правилу Н.Е. Жуковского: вектор  спроектировать на плоскость, перпендикулярную оси переносного вращения, проекцию повернуть на 90 градусов в сторону переносного вращения. Полученное направление будет соответствовать направлению кориолисова ускорения. спроектировать на плоскость, перпендикулярную оси переносного вращения, проекцию повернуть на 90 градусов в сторону переносного вращения. Полученное направление будет соответствовать направлению кориолисова ускорения.
2.5 Вопросы для самоконтроля по разделу
1. В чем состоят основные задачи кинематики? Назовите кинематические характеристики.
2. Назовите способы задания движения точки и определение кинематических характеристик.
3. Дайте определение поступательного, вращательного вокруг неподвижной оси, плоскопараллельного движения тела.
4. Как задается движение твердого тела при поступательном, вращательном вокруг неподвижной оси и плоскопараллельном движении тела и как определяется скорость и ускорение точки при этих движениях тела?
3. Динамика
3.1 Задачи динамики
В динамике решаются два типа задач. Первая состоит в определении действующих сил при заданном законе движения материального объекта (точки или системы). Вторая задача обратная первой: определяется закон движения материального объекта при известных действующих на него силах.
3.2. Основные понятия динамики
Инерционность
- свойство материальных тел сохранять состояние покоя или равномерного прямолинейного движения, пока внешние силы не изменят этого состояния.
Масса
- количественная мера инерционности тела. Единица измерения массы - килограмм (кг).
Материальная точка
- тело, обладающее массой, размерами которого при решении данной задачи пренебрегают.
Центр масс механической системы
- геометрическая точка, координаты которой определяются формулами.
 (3.1 ) (3.1 )
где mk
,
xk
,
yk
,
zk
- масса и координаты k - той точки механической системы,
m
- масса системы.
В однородном поле тяжести положение центра масс совпадает с положением центра тяжести.
Момент инерции материального тела относительно оси
– количественная мера инертности при вращательном движении.
Момент инерции материальной точки относительно оси равен произведению массы точки на квадрат расстояния точки от оси.
JZ
=
m
×
r
2
(3.2)
Момент инерции системы (тела ) относительно оси равен арифметической сумме моментов инерции всех точек.
JZ
=
å
mk
×
rk
2
(3.3 )
Сила инерции материальной точки
- векторная величина, равная по модулю произведению массы точки на модуль ускорения и направленная противоположно вектору ускорения
 (3.4) (3.4)
Сила инерции материального тела
- векторная величина, равная по модулю произведению массы тела на модуль ускорения центра масс тела и направленная противоположно вектору ускорения центра масс
 ,
(3.5) ,
(3.5)
где  - ускорение центра масс тела. - ускорение центра масс тела.
Элементарный импульс силы
- векторная величина  , равная произведению вектора силы , равная произведению вектора силы  на бесконечно малый промежуток времени dt на бесконечно малый промежуток времени dt
 , (3.6) , (3.6)
Полный импульс силы за D
t
равен интегралу от элементарных импульсов
 (3.7) (3.7)
Элементарная работа
силы
- скалярная величина dA
, равная скалярному произведению вектора силы  на бесконечно малое перемещение d на бесконечно малое перемещение d .
.
Скалярное произведение векторов равно произведению их модулей на косинус угла между направлениями векторов.
dA
=
F
×
ds
×
cos
a
,
(3.8)
где a - угол между направлениями векторов перемещения и силы.
Работа силы  на конечном перемещении точки её приложения равна интегралу от элементарной работы, взятому по перемещению. на конечном перемещении точки её приложения равна интегралу от элементарной работы, взятому по перемещению.
 (3.9) (3.9)
Единица измерения работы - Джоуль (1 Дж=1 Н×м).
Количество движения материальной точки
- векторная величина  , равная произведению массы m на её скорость , равная произведению массы m на её скорость  . .
 = =  (3.10) (3.10)
Количество движения механической системы  равно векторной сумме количества движения её точек. равно векторной сумме количества движения её точек.
 (3.11) (3.11)
или с учетом формул ( 3.1 ).
 , (3.12) , (3.12)
где: m- масса механической системы,
 - вектор скорости центра масс системы. - вектор скорости центра масс системы.
Кинетическая энергия материальной точки
- скалярная величина Т, равная половине произведения массы точки на квадрат её скорости.
T
= (3.13)
(3.13)
Кинетическая энергия механической системы равна сумме кинетических энергий всех её точек.
 (3.14) (3.14)
3.3. Аксиомы динамики
Первая аксиома - закон инерции
.
Если на свободную материальную точку не действуют никакие силы или действует уравновешенная система сил, то точка будет находиться в состоянии покоя или равномерного прямолинейного движения.
Вторая аксиома- закон пропорциональности ускорения
.
Ускорение, сообщаемое материальной точке действующей на неё силой, пропорционально этой силе и по направлению совпадает с направлением силы.
 , (3.15 ) , (3.15 )
Выражение (3.15) называют основным законом динамики
.
Третья аксиома - закон противодействия
.
Силы, с которыми действуют друг на друга две материальные точки, равны по модулю и направлены вдоль прямой, соединяющей эти точки, в противоположные стороны
 , (3.16) , (3.16)
Четвертая аксиома - закон независимости действия сил
.
При действии на материальную точку системы сил полное ускорение этой точки равно геометрической сумме ускорений от действия каждой силы
 , ( 3.17 ) , ( 3.17 )
3.4. Дифференциальные уравнения динамики
Дифференциальные уравнения движения точки связывают ускорение точки с действующими на нее силами. Фактически дифференциальные уравнения являются записью основного закона динамики в явной дифференциальной форме.
Для абсолютного движения точки (движение в инерциальной системе отсчета) дифференциальное уравнение имеет вид
 , (3.18) , (3.18)
Векторное уравнение (3.17) может быть записано в проекциях на оси прямоугольной инерциальной системы координат
  , ,
 , (3.19) , (3.19)
 , ,
При известной траектория движения точки уравнение (3.18) может быть записано в проекциях на оси естественной системы координат
 , (3.20) , (3.20)
C учетом (2.8) уравнения примут вид
  (3.21)
(3.21)
3.5 Общие теоремы динамики
Общие теоремы динамики устанавливают зависимость между мерами механического движения и механического взаимодействия. Выводы теорем являются результатом тождественного преобразования основного закона динамики.
Теорема об изменении количества движения
: изменение количества движения материальной точки (механической системы) за конечный промежуток времени равно сумме импульсов внешних сил за тот же промежуток времени
 -для материальной точки; (3.22) -для материальной точки; (3.22)
 -для механической системы. (3.23) -для механической системы. (3.23)
Теорема об изменении кинетической энергии
: изменение кинетической энергии точки (механической системы) при её перемещении равно сумме работ всех действующих внешних сил на этом перемещении
 - для материальной точки (3.24) - для материальной точки (3.24)
 - для механической системы (3.25) - для механической системы (3.25)
Кинетическая энергия механической системы определяется в соответствии с (3.14), при этом для твердых тел выведены следующие зависимости
 -при поступательном движении тела, (3.26) -при поступательном движении тела, (3.26)
 - при вращательном движении тела, (3.27) - при вращательном движении тела, (3.27)
 - при плоско-параллельном движении тела. (3.28) - при плоско-параллельном движении тела. (3.28)
 Моменты инерции некоторых однородных тел Моменты инерции некоторых однородных тел
Рис. 3.1 Рис.3.2.
Рис.3.3.
Момент инерции цилиндра относительноего оси (рис. 3.1.)
Момент инерции стержня относительно оси z (рис.3.2)
Момент инерции прямоугольной пластины относительно осей х и y (рис.3.3)
Момент инерции шара определяется по формуле:
В общем случае работа сил определяется в соответствии с (3.8),(3.9).В ряде случаев действия сил работа может быть определена по частным зависимостям.
Работа силы тяжести
 , (3.29) , (3.29)
где:  - сила тяжести, - сила тяжести,
 - изменение положения тела по вертикали. - изменение положения тела по вертикали.
Работа силы при вращательном движении тела
 , (3.30)
, (3.30)
где:  - момент силы, - момент силы,
 - угловая скорость тела. - угловая скорость тела.
Следует иметь в виду, что работа, как скалярная величина, может быть положительной или отрицательной. Работа будет положительной если направление действия силы совпадает с направлением движения.
3.6 Принцип Даламбера
Изложенные выше методы исследования движения тел, базируются на законах Ньютона. Разработаны методы, в основу которых положены другие принципы. Одним из них является принцип Даламбера
.Принцип формулируеся: если в любой момент времени к действующим на точку силам присоединить силы инерции, то полученная система сил будет уравновешенной
 , (3.31) , (3.31)
или для механической системы

 (3.32) (3.32)
Принцип Даламбера позволяет применять к решению задач динамики более простые методы статики, поэтому он широко используется в инженерной практике.
3.7. Вопросы для самоконтроля по разделу
1. Сформулируйте основные задачи динамики.
2. Дайте определения массы, момента инерции, импульса силы, работы силы, количества движения, кинетической энергии.
3. Сформулируйте основные законы динамики.
4. Какое уравнение называется дифференциальным уравнением динамики? Какой алгоритм решения задач динамики с помощью дифференциальных уравнений?
5. Сформулируйте общие теоремы динамики.
6. Сформулируйте принцип Даламбера. Как определяются силы инерции?
7. Сформулируйте принцип возможных перемещений. Для каких условий применяется принцип возможных перемещений?
|