Саратовский Государственный Технический Университет
Кафедра АЭУ
Курсовая работа по электроприводу
«Расчет электропривода»
Саратов – 2008
Содержание
Задание
1. Выбор электродвигателя
2. Расчет параметров трансформатора
3. Выбор вентилей
4. Расчет параметров якорной цепи
5. Расчет параметров системы управления
5.1 Для верхней границы диапазона
5.2 Для нижней границы диапазона
6. Расчет параметров отсечки
7. Построение статических характеристик
Заключение
Приложение
Задание
1. Выбрать электродвигатель и элементы системы управления автоматизированного привода, обеспечивающего при заданной нагрузочной диаграмме диапазон регулирования скорости вращения D=75 с относительной ошибкой d=15%. При пуске двигателя и перегрузках вращающий момент должен удерживаться в пределах от М1кр=85 Н×м до М2кр=115 Н×м. Номинальная угловая скорость n=1950 об/мин.
2. Составить принципиальную схему привода.
3. Рассчитать статические характеристики и построить их.
1.
Выбор электродвигателя
Рассчитаем эквивалентный момент, используя нагрузочную диаграмму:

Рассчитаем мощность двигателя:

Исходя из мощности двигателя и номинальной угловой скорости, выбираем электродвигатель ПБСТ-63 с номинальными параметрами:
Uн=220 В; Pн=11 кВт; Iн=54 А; nн=2200 об/мин; wя=117; Rя=0,046 Ом; Rд=0,0186 Ом; wв=2200; Rв=248 Ом.
Рассчитаем действительный момент и параметры двигателя:






2.
Расчет параметров трансформатора
Напряжение вторичной цепи и мощность трансформатора:

кс=1,11-коэффициент схемы
кз=1,1-коэффициент запаса, учитывающий возможное падение напряжения
кR=1,05-коэффициент запаса, учитывающий падение напряжения в вентилях и коммутацию тока в вентилях.

кi=1,1-коэффициент запаса, учитывающий отклонение формы тока в вентилях от прямоугольной км=1,92-коэффициент схемы
Исходя из напряжения вторичной цепи и мощности, выбираем трансформатор ТТ-25 с номинальными параметрами: Sтр=25 кВт; U2=416±73 В; I2ф=38 А;
uк=10%; iхх=15%. Рассчитаем сопротивления трансформатора:




3.
Выбор вентилей
С учетом диапазона регулирования скорости выбираем однофазную систему управления электрическим приводом. Среднее значение тока вентиля:  . Номинальный ток вентиля: . Номинальный ток вентиля:  . кз=2,2-коэффициент запаса, m=2-коэффициент, зависящий от схемы выпрямления. Наибольшее обратное напряжение, прикладываемое к вентилю: . кз=2,2-коэффициент запаса, m=2-коэффициент, зависящий от схемы выпрямления. Наибольшее обратное напряжение, прикладываемое к вентилю:
Реклама


Номинальное напряжение вентилей:

Выбираем вентили Т60-8.
4.
Расчет параметров якорной цепи
Наибольшая допустимая величина переменной составляющей выпрямленного тока:

Требуемая индуктивность якорной цепи:

Здесь

Общая индуктивность двигателя и трансформатора меньше, чем требуемая, поэтому в якорную цепь необходимо включить сглаживающий дроссель с индуктивностью:

Активное сопротивление дросселя:
Активное сопротивление якорной цепи:


5.
Расчет параметров системы управления
Для верхней границы диапазона

Что соответствует углу регулировки  По зависимости По зависимости  определяем изменение ЭДС и угла регулирования: определяем изменение ЭДС и угла регулирования:
  
  
При этом коэффициент передачи преобразователя равен:

Коэффициент передачи СИФУ определим по рис. 2 Приложения:
Для 


Общий коэффициент передачи системы в разомкнутом состоянии:

Наибольшая статическая ошибка в разомкнутом состоянии:


что в процентном соотношении:

Нижняя граница диапазона:


Что соответствует углу регулировки 
По зависимости определяем изменение ЭДС и угла регулирования:
  
  
При этом коэффициент передачи преобразователя равен:

Коэффициент передачи СИФУ определим по рис. 2 Приложения:
Для
 

Общий коэффициент передачи системы в разомкнутом состоянии:

Наибольшая статическая ошибка в разомкнутом состоянии:


что в процентном соотношении:

Наибольшая статическая ошибка в замкнутом состоянии:

Следовательно, на нижней границе диапазона регулирования относительная ошибка больше допустимой. Для уменьшения статической ошибки введем в систему управления промежуточный усилитель. Определим требуемый коэффициент передачи всей системы в разомкнутом состоянии:
Следовательно, коэффициент передачи промежуточного усилителя должен быть не менее:
6.
Расчет параметров отсечки
В качестве стабилитрона V1 принимаем стабилитрон Д 818 (напряжение стабилизации Uст1=9 В <Uу макс=11 В).
Коэффициент передачи токовой отсечки:



Напряжение стабилизации стабилитрона V2:

Выбираем стабилитрон Д 817 (напряжение стабилизации  ) )
Функциональная схема электропривода представлена на рис. 1 Приложения.
В качестве усилителя использован интегральный усилитель-ограничитель со стабилитронами в цепи обратной связи.
7.
Построение статических характеристик
При  . При . При 

При 

При 



Напряжение ограничения найдем из статической характеристики СИФУ (рис. 2 Приложения.):

Заключение
В ходе расчета курсовой работы была изучена методика расчета параметров основных составляющих электрического привода, таких как электрический двигатель, трансформатор, система импульсно-фазового управления и тиристорный преобразователь. Была рассчитана и построена статическая характеристика электрического привода, дающая представление о скорости привода с изменением тока якоря электрического двигателя, нагрузочная диаграмма, дающая представление о нагрузке, которую испытывает привод во время работы. Также были составлены принципиальная и функциональная схемы, дающие представление об электрических элементах, входящих в систему управления электрическим приводом. Таким образом, был реализован целый комплекс расчетов и построений, который развивает у студента знание и умение рассчитывать электрический привод, целиком, так и его основные части.
Реклама

Приложение
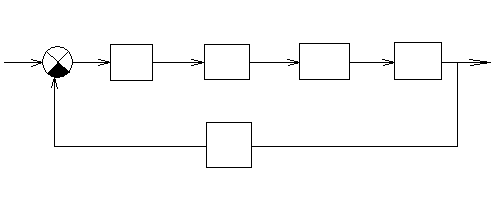
Рис.1 Функциональная схема электропривода.
|
