|  Содержание Содержание
Техническое задание…………………………………………………………….....2
Введение…………………………………………………………………………….3
1. Кинематический и силовой расчет привода. Выбор
электродвигателя и редуктора…………………………………………………..4
1.1. Определение мощности на валу исполнительного органа………….....4
1.2. Определение расчетной мощности на валу электродвигателя………...4
1.3. Определение частоты вращения вала исполнительного
органа и двигателя………………………………………………………..4
1.4. Выбор электродвигателя…………………………………………………6
1.5. Определение передаточного отношения привода расчет силовых и кинематических параметров привода выбор редуктора…………………….8
2. Выбор муфты…………………………………………………………..………..11
3. Проектирование открытой передачи…………………………………….….....12
4. Проектирование исполнительного органа………………………………....….14
4.1. Проектный расчет вала……………………………………....…………..14
4.2. Подбор подшипников и шпонок……………………………………… ..14
4.3. Проверочный расчет вала на статическую прочность
по эквивалентному моменту………………………………………….....16
4.4. Проверочный расчет подшипников на долговечность………………...18
4.5. Проверочный расчет шлицевых или шпоночных соединений………..19
Список использованных источников……………………………………………..20
 Введение Введение
В данной курсовой работе выполнено проектирование привода ленточного конвейера по заданным параметрам: окружной скорости, окружного усилия и диаметра барабана исполнительного органа, а также параметров режима работы, срока службы и кратковременных пиковых перегрузок в приводе. В ходе курсовой работы по расчетным вращающим моментам, частотам вращения и мощностям на волах были выбраны стандартные: электродвигатель, редуктор и компенсирующая муфта. Так же были выполнены проектировочные расчеты исполнительного органа, и расчет ременной передачи.
 1. Кинематический и силовой расчет привода. 1. Кинематический и силовой расчет привода.
Выбор электродвигателя и редуктора
1.1. Определение мощности на валу исполнительного органа
Мощность P3,
кВт, на валу исполнительного органа определяется по формуле:
 , , где Ft
– окружное усилие, Н;
vt
– окружная скорость, м/с (см. рис. 1).

1.2. Определение расчетной мощности на валу двигателя
Расчетная мощность на валу двигателя Р1,
кВт, определяется с учетом потерь в приводе:
Реклама

 ,
где η – общий КПД привода равный ,
где η – общий КПД привода равный 
η1
– КПД открытой ременной передачи, η1
= 0,95 [1, табл. 1]; [1, табл. 1];
η2
– КПД цилиндрического двухступенчатого редуктора , η2
= ; ;

При этом:
1.3. Определение частоты вращения вала исполнительного механизма
и двигателя
Частота n3
, мин-1
, вращения вала:
 где D – диаметр барабана ленточного конвейера,450 мм;

1 – электродвигатель;
2 – ременная передача;
3 – двухступенчатый коническо-целендрический редуктор;
4 – компенсирующая муфта;
5 – узел барабана.
Рисунок 1 – Кинематическая схема
привода ленточного конвейера
 Частота n1
, мин-1
, вращения вала электродвигателя вычисляется по формуле: Частота n1
, мин-1
, вращения вала электродвигателя вычисляется по формуле:
 ,
где i – передаточное отношение привода, ,
где i – передаточное отношение привода, 
i1
– передаточное отношение открытой ременной передачи, i1
=2…3 [1, табл. 1];
i2
– передаточное отношение цилиндрического двухступенчатого редуктора, i2
=3…6;
По формуле (1.5) получим интервал оптимальных частот вращения вала двигателя:


Выбираем частоту вращения вала электродвигателя примерно в 1,2…1,3 раза больше среднего значения интервала:
 мин-1 мин-1
1.4. Выбор электродвигателя
Исходя из необходимой мощности и интервала оптимальных частот вращения, выбираем электродвигатель – АИР71А4(рис.2). Мощность РДВ
= 0,55 кВт с синхронной частотой вращения равной 1500 мин-1
.
Номинальная асинхронная частота вращения n1
вала вычисляется по формуле: 
где nc
– синхронная частота вращения, мин-1
, nc
=1500 мин-1
[2];
S – относительное скольжение вала, %, S=9,5%;

Проверим условие работоспособности при пуске:
 где  – кратность пускового момента двигателя – кратность пускового момента двигателя  ; ;
 – кратковременных пиковых перегрузок в приводе, – кратковременных пиковых перегрузок в приводе,  =1,5; =1,5;
2,4 > 1,5 – условие выполняется.
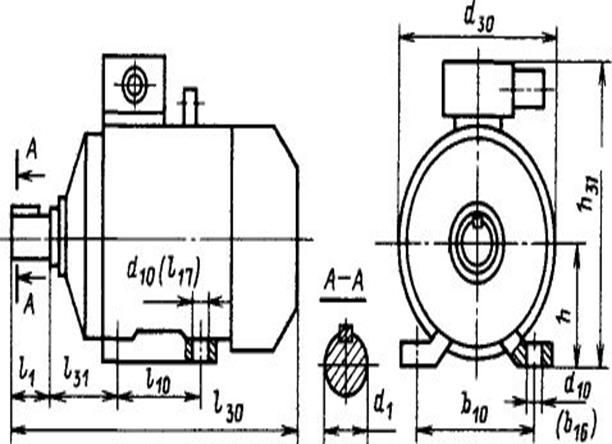
Рисунок 2 – Эскиз электродвигателя АИР71А4
 1.5. Определение передаточного отношения привода
расчет силовых и кинематических параметров привода выбор редуктора
1.5. Определение передаточного отношения привода
расчет силовых и кинематических параметров привода выбор редуктора
Передаточное отношение привода i вычисляется по формуле:
 , , Подставив, значения получим:
Назначаем передаточное отношение i1
открытой передачи таким образом, чтобы оно делило табличное значение интервала передаточных отношений в том же соотношении, в каком частота вращения выбранного электродвигателя делит интервал оптимальных частот вращения. Для этого составим пропорцию:
 Подставив значения, находим i1
:
i1
=2.
Таким образом, передаточное отношение редуктора ip
вычисляем следующим образом:
Округляем значение передаточного отношения редуктора до ближайшего значения в таблице стандартных коническо-цилиндрических редукторов по ГОСТ 27142-86 ip
= 14. Тогда передаточное отношение клиноременной передачи равно:
Реклама

Связь между мощностью предыдущего и последующего валов выражаются зависимостью:  j = 1, 2…k–1, j = 1, 2…k–1,
где k
– порядковый номер исполнительного механизма на кинематической схеме привода (см. Рисунок 1);


 Связь между частотой вращения предыдущего и последующего валов выражаются зависимостью: Связь между частотой вращения предыдущего и последующего валов выражаются зависимостью:
 j = 1, 2…k–1, j = 1, 2…k–1,
Тогда частота вращения 2-го вала будет равна:
Вращающие моменты вычислим по формуле:
 j = 1,2…k, j = 1,2…k, Вычислим вращающие моменты на всех валах:



Вычисленные параметры запишем в таблицу.
Таблица 1 – Силовые и кинематические параметры привода
| Номер вала
|
Мощность
Р, кВт
|
Частота вращения n, мин-1
|
Вращающий момент
Т, Нм
|
| 1
|
0,52
|
1355,13
|
3,66
|
| 2
|
0,5
|
677,7
|
7
|
| 3
|
0,46
|
23.9
|
183,8
|
Исходя из рассчитанных вращающего момента на выходном валу и частоты вращения на входном валу, выбираем стандартный коническо–цилиндрический редуктор по ГОСТ 27142-86 типоразмера Ц2У-100 Твых
=250 Нм при nвх
= 677,7 мин-1
.
| Типоразмер редуктора
|
L
|
L1
|
L2
|
L3
|
L4
|
L5
|
B
|
B1
|
B2
|
H
|
H1
|
H2
|
d
|
| Ц2У-100
|
390
|
325
|
290
|
85
|
136
|
165
|
155
|
145
|
109
|
230
|
112
|
20
|
15
|
Рисунок 3 – Эскиз редуктора
 2. Выбор муфты. 2. Выбор муфты.
Муфта зубчатая серии МЗ является подвижной муфтой, она способна компенсировать угловое и радиальное смещение и перекосы осей валов. Муфта зубчатая серии МЗ состоит из двух зубчатых обойм, соединенных болтами, и двух зубчатых втулок, вставленных в обоймы. На обоймы устанавливаются крышки с манжетами.
Соединяемые муфтой зубчатой валы запрессовываются в отверстия зубчатых втулок. Зубья втулок входят в зацепление с зубьями обойм. Благодаря форме зуба втулок возможно незначительное смещение в любых направлениях. Зубчатые муфты изготавливаются в соответствии по ГОСТ 50895-96, ГОСТ 5006-83 или по ТУ заказчика.
Муфты зубчатые общемашиностроительного применения используются для соединения валов и передачи крутящего момента от 1000 до 63000 Н*м и специальных от 71000 до 250000 Н*м при угловых, радиальных и осевых смещений валов.
Компенсация смещений валов достигается относительным перекосом втулок и обойм за счет боковых зазоров между зубьями и выполнения поверхности выступов зубьев втулок сферической. Перекос оси каждой втулки относительно оси обоймы - не более 1°30'.
Муфты зубчатые
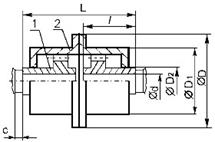
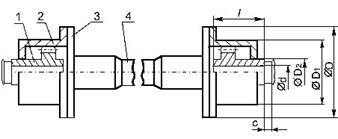
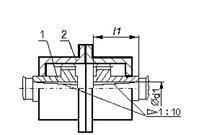
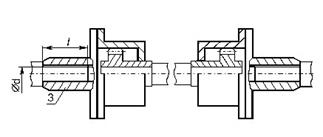
1- втулка, 2- обойма, 3- фланцевая полумуфта, 4- промежуточный вал.
Рисунок 4 – Эскиз муфты.
 3. Проектирование ременной передачи. 3. Проектирование ременной передачи.
Результаты расчета ременной передачи
 По сравнению с другими видами передач ременные имеют ряд существенных преимуществ: возможность передачи движения на сравнительно большие расстояния без особого увеличения массы передачи; простота конструкции и эксплуатации; плавность хода и бесшумность работы; эластичность привода, смягчающая колебания нагрузки и предохраняющая от значительных перегрузок за счет скольжения; меньшая начальная стоимость. По сравнению с другими видами передач ременные имеют ряд существенных преимуществ: возможность передачи движения на сравнительно большие расстояния без особого увеличения массы передачи; простота конструкции и эксплуатации; плавность хода и бесшумность работы; эластичность привода, смягчающая колебания нагрузки и предохраняющая от значительных перегрузок за счет скольжения; меньшая начальная стоимость.
Следует отметить и недостатки, присущие ременным передачам: сравнительно небольшие передаваемые мощности (обычно до 50 кВт); непостоянство передаточного отношения; значительные габариты; повышенные нагрузки на валы и опоры; необходимость натяжения ремня в процессе эксплуатации; малая долговечность ремней, особенно быстроходных передачах.
 4. Проектирование исполнительного органа 4. Проектирование исполнительного органа
4.1. Проектный расчет вала
Валы – детали, которые служат для поддержания других вращающихся деталей, а сами опираются на подшипники.
На этапе эскизного проектирования ориентировочно была намечена конструкция валов, определены диаметры отдельных участков. Теперь следует уточнить эти размеры, согласовать их с деталями, устанавливаемыми на вал, учесть вид и расположение опор, конструкцию уплотнения, технологию изготовления. Перед отработкой конструкции вала должны быть решены такие важные вопросы, как способ передачи вращающего момента в соединении вал - ступица и способ крепления деталей на валу от осевого перемещения.
1)
Рассчитываем значение диаметра выходного конца вала:
 ;
;
где Mk = Т - крутящий момент, Н·мм;  - допускаемое напряжение на кручение,
- допускаемое напряжение на кручение,  ;
=10…30 МПа; Т=184000 Нм – берём из предварительного расчёта привода.
;
=10…30 МПа; Т=184000 Нм – берём из предварительного расчёта привода.
 мм.
мм.
Из стандартного ряда принимаем: d1=45 мм; L1=70 мм.
2)
Далее по значению диаметра вала выбираем и устанавливаем шпонку.
Шпонка, выбранная по длине и диаметру конца вала, имеет размеры, ГОСТ 23360-78:
где b – ширина, h – высота шпонки, t – глубина паза в вале, t2 – глубина паза в ступице, Lш – длина шпонки.
Длина шпонки: Lш=L1-20=70-10=50 мм.
Из стандартного ряда длину шпонки берём: Lш=50 мм.
4.2. Подбор подшипников и шпонок.
Исходя из геометрических параметров вала, в месте соединения его с барабаном определяем размеры шпонки вала под барабаном.
Шпонка призматическая для диаметра вала d = 55 мм:
- высота шпонки h = 10 мм;
- ширина шпонки b = 16 мм;
- длина шпонки l = 100 мм;
- глубина паза вала t1
= 7 мм;
- глубина паза ступицы t2
= 10 мм.
Рисунок 6 – Эскиз шпоночного соединения.
 Для опор вала исполнительного органа применим шариковые радиальные сферические двухрядные подшипники (ГОСТ 28428 – 90), из-за возможных перекосов опор подшипников. Назначаем подшипники легкой серии № 1311. Для опор вала исполнительного органа применим шариковые радиальные сферические двухрядные подшипники (ГОСТ 28428 – 90), из-за возможных перекосов опор подшипников. Назначаем подшипники легкой серии № 1311.
- диаметр отверстия dП
= 55 мм;
- диаметр внешнего кольца D = 120 мм;
- ширина подшипника В = 29 мм;
- координата фаски r = 3 мм;
- динамическая радиальная грузоподъёмность Cr
= 51,0 кН;
- статическая радиальная грузоподъёмность C0
r
= 24,0 кН.
Рисунок 7 – Эскиз подшипника.
На этом этапе подбирается корпус подшипника, крышки подшипника и манжетные уплотнения.
Корпус подшипника выбирается по диаметру наружного кольца подшипника.
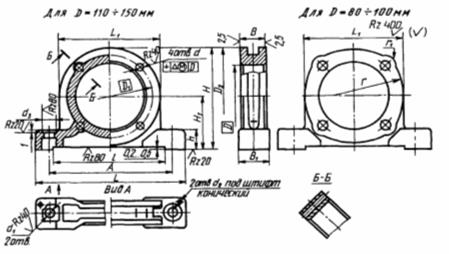
Рис.4. Корпус подшипника.
Корпус подшипника УМ 100. ГОСТ 13218.3-80, размеры, мм
| D
|
D1
|
d
|
d1
|
d2
|
d3
|
A
|
B
|
B1
|
L
|
L1
|
l
|
H
|
H1
|
h
|
r
|
r1
|
| 90
|
120
|
11
|
17
|
8
|
22
|
180
|
40
|
48
|
230
|
135
|
142
|
139.5
|
74
|
24
|
85
|
12.5
|
Крышки подшипника выбирается по диаметру вала.
Крышка подшипника торцевая с манжетным уплотнением
МН 100*65 ГОСТ 13219.5-81
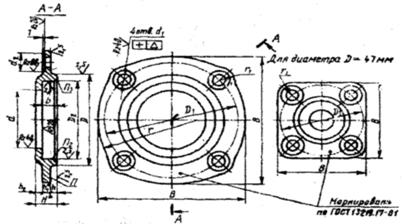
Рис.5. Крышка подшипника торцевая с манжетным уплотнением.
| D
|
dвала
|
d
|
D1
|
D2
|
d1
|
d2
|
B
|
b
|
H
|
h
|
h1
|
h2
|
r
|
r1
|
| 100
|
55
|
66
|
120
|
90
|
11
|
20
|
135
|
13.6
|
21
|
5
|
7
|
9
|
85
|
12.5
|
Крышка подшипника торцевая глухая низкая ГН 100 ГОСТ 13219.2-81
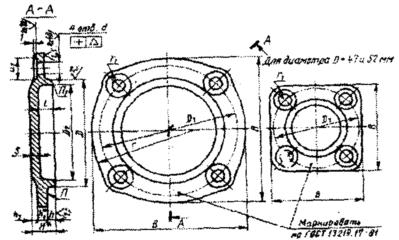
Рис.6. Крышка подшипника торцевая глухая низкая.
| D
|
D1
|
D2
|
B
|
d
|
d1
|
n
|
H
|
h
|
h1
|
h2
|
l
|
s
|
r
|
r1
|
| 90
|
120
|
90
|
135
|
11
|
20
|
4
|
16
|
5
|
7
|
4
|
10
|
6
|
85
|
12
|
 4.3. Проверочный расчет вала на статическую прочность 4.3. Проверочный расчет вала на статическую прочность
по эквивалентному моменту
Окружная сила действующая на барабан со стороны ремня задана в техническом задании:
Ft
= 1150 Н
Сила натяжения ремня на ненагруженной стороне равна: S2
= 0,25.
Ft
=0,25.
1150 =287,5 Н
Сила натяжения на нагруженной стороне равна: S1
= Ft
+ S2
= 1150 + 287,5 = 1437,5 Н
Общая сила, действующая на барабан со стороны ремня: Q = S1
+ S2
= 287,5 + 1437,5 = 1725 Н
Из уравнения моментов найдем силы FA
и FВ
:


Так как схема нагружения симметричная то FA
= FВ
= 862,5 Н.
В нашем случае на вал действуют сила натяжения ремня Q и крутящий момент Т, тогда формула для определения эквивалентного момента примет вид: 
Из расчетной схемы (Рисунок 8) видно, что опасным сечением является сечение D, так как в этом сечении одновременно приложены максимальные крутящий и изгибающие моменты.
ТD
= 638,94 Нм
МD
= 0,111.
862,5 = 291,38 Нм
Тогда:
 
Максимальное эквивалентное напряжение равно:
 где dD
–
Диаметр вала в сечении D,мм.
Тогда:
Рисунок 8 – Расчетная схема вала исполнительного органа
 Допускаемое напряжение [σ], МПа: Допускаемое напряжение [σ], МПа:
 где Kр
– коэффициент режима работы, Kр
= 1,8;
[σи
] – допускаемое напряжение изгиба, МПа.
 где σТ
– предел текучести материала (Сталь 40Х), σТ
= 640 МПа;
[n] – коэффициент запаса, [n] = 2.
Тогда:
25,57 МПа ≤ 177,78 МПа, – условие выполняется.
4.4. Проверочный расчет подшипников на долговечность
Fr
= FA
= FВ
= 2625 Н;
Х – коэффициент радиальной нагрузки, Х = 1;
е – коэффициент осевого нагружения, е = 0,19;
Определим эквивалентную динамическую нагрузку:
Pr
= VXFr
KБ
KТ
,
где V – коэффициент внутреннего кольца, V = 1;
КТ
– температурный коэффициент, КТ
= 1;
КБ
– коэффициент безопасности, КБ
= 1,3.
Pr
= 1.
1.
2625.
1,3.
1 = 3412,5 Н.
Определяем по уровню надёжности и условиям применения расчётный ресурс подшипника:
 где a1
– коэффициент долговечности, a1
= 1;
a23
– коэффициент, учитывающий влияние на долговечность особых свойств материала, a23
= 0,3;

Сравниваем с требуемым ресурсом = 9500, ч: = 9500, ч:
Условие выполняется, следовательно подшипник 1212 – годен.
4.5. Проверочный расчет шпоночного соединения
4.5.1. Проверочный расчет шпонки вала под муфту:
Условие работоспособности шпонки вала:
 где Т – передаваемый момент, Т = 638.94Нм;
d – диаметр вала, d = 45 мм;
lр
– рабочая длина шпонки, мм:
lр
= l – b = 70 – 14 = 56 мм;
k – глубина врезания шпонки, мм:
k = h – t1
= 9 – 5,5 = 3,5 мм.
[σсм
] –допускаемое напряжение смятия, [σсм
]<180 МПа.

144,5 МПа < 180 МПа
условие выполняется.
4.5.2. Проверочный расчет шпонки вала в месте соединения вала с барабаном:
Условие работоспособности шпонки вала:
 где Т – передаваемый момент, Т = 638.94Нм;
d – диаметр вала, d = 60 мм;
lр
– рабочая длина шпонки, мм:
lр
= l – b = 100 – 18 = 82 мм;
k – глубина врезания шпонки, мм:
k = h – t1
= 11 – 7 = 4 мм.
[σсм
] –допускаемое напряжение смятия, [σсм
]<180 МПа.

64,9 МПа < 180 МПа – условие выполняется.
Шпоночное соединение показано на рисунке 6.
 Список использованных источников Список использованных источников
1. Устиновсий Е.П., Шевцов Ю.А., Яшков Ю.К., Уланов А.Г. Многовариантное проектирование зубчатых цилиндрических, конических и червячных передач с применением ЭВМ: Учебное пособие к курсовому проектировании по деталям машин. – Челябинск: ЧГТУ, 1992.
2. Справочник конструктора - машиностроителя: В 3 т. – 8-е изд., перераб. и доп. Под ред. И. Н. Жестковой. – М.: Машиностроение, 2001.
3. Дунаев П.Ф., Леликов О.П. конструирование узлов и деталей машин: Ученое пособие для техн. спец. вузов. – 6-е изд., исп. – М.: Высш. шк., 2000. – 477с., ил.
4. Ряховский О.А., Иванов С.С. Справочник по муфтам. – Л.: Политехника, 1991. – 384 с.: ил.
5. Сохрин П.П., Устиновский Е.П., Шевцов Ю.А. Техническая документация по курсовому проектировании по деталям машин и ПТМ: Ученое пособие. – Челябинск: Ид. ЮУрГУ, 2001. – 67 с.
6. Чурюкин В.А., Яшков Ю.К. Обозначение конструкторской документации: Ученое пособие. – Челябинск: ЧГТУ, 1986. – 61 с.
7. Сохрин П.П., Кулешов В.В. Проектирование валов: Учебное пособие. Челябинск: Изд. ЮУрГУ, 2000. – 94 с.
8. Сохрин П.П. Проектирование ременных передач: Ученое пособие: Челябинск: ЧГТУ, 1997. – 94 с.
|