| Московский государственный университет им.Н.Э.Баумана
Калужский филиал
ФНК
Факультет
Кафедра ФН-5
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту на тему:
Проектирование и исследование механизмов плунжерного насоса простого действия
Калуга
ВВЕДЕНИЕ
Насос простого действия (рис. 37-1а) состоит из кривошипно-ползунного механизма 1,2,3, ползун 3 которого является плунжером насоса, совершающим возвратно поступательное движение в горизонтальном цилиндре 4 с автоматически действующими клапанами 5,6. Рабочий цикл такой установки совершается за один оборот кривошипа 1. При движении плунжера 3 вправо происходит всасывание жидкости в цилиндр при давлении, ниже атмосферного pmin
, и при движении поршня влево – нагнетание жидкости в трубопровод при давлении pmax
(см. индикаторную диаграмму рис. 37-1б). Коленчатый вал 1 кривошипно-ползунного механизма приводится во вращательное движение от электродвигателя 7 через планетарный редуктор с колёсами 8,9,10,11, водило 12 и муфту 13. Для обеспечения требуемой неравномерности движения коленчатого вала имеется маховик 14.
Смазка подвижных соединений механизма установки осуществляется под давлением от масляного насоса 17 кулачкового типа (рис. 37-1в). Закон движения толкателя в пределах рабочего угла поворота кулачка  представлен на рис.42. Вращение кулачка 17 осуществляется от кривошипа 1 через корригированные зубчатые колёса 15 и 16 с неподвижными осями вращения. представлен на рис.42. Вращение кулачка 17 осуществляется от кривошипа 1 через корригированные зубчатые колёса 15 и 16 с неподвижными осями вращения.
Исходные данные
| № п/п
|
Наименование параметра
|
Обозначение
|
Размерность
|
Вариант Г
|
| 1
|
Средняя скорость поршня 3 насоса
|

|
м/с
|
0,693
|
| 2
|
Число оборотов коленчатого вала
|

|
об/мин
|
130
|
| 3
|
Отношение длины шатуна к длине кривошипа 1
|

|
-
|
4,86
|
| 4
|
Положение центра тяжести шатуна 2
|

|
-
|
0,24
|
| 5
|
Диаметр цилиндра 4
|

|
м
|
0,10
|
| 6
|
Давление плунжера 3
|

|
кГ/см2
|
22,0
|
| |
|

|
кГ/см2
|
0,5
|
| 7
|
Вес шатуна 2
|

|
кГ
|
8,0
|
| 8
|
Вес поршня(плунжера 3)
|

|
кГ
|
20,0
|
| 9
|
Момент инерции шатуна
|

|
кГмсек2
|
0,016
|
| 10
|
Коэффициент неравномерности вращения вала 1
|

|
-
|
1/25
|
| 11
|
Угловая координата кривошипа для силового расчёта
|

|
град
|
300
|
| 12
|
Число зубьев колёс
|

|
-
|
14
|
| |
|

|
-
|
27
|
| 13
|
Модуль зубчатых колёс 15-16
|

|
Мм
|
4
|
| 14
|
Угол наклона зуба для колёс 15-16
|

|
град
|
0
|
| 15
|
Число сателлитов в планетарном редукторе
|

|
-
|
3
|
| 16
|
Передаточное отношение планетарного редуктора
|

|
-
|
11,3
|
ЛИСТ 1.
I.
Проектирование эвольвентной зубчатой передачи
Реклама

1.
Цель:
Выполнить геометрический расчет эвольвентной зубчатой передачи и изобразить картину зацепления колес.
2. Исходные данные:  =14, =14,  = 27, = 4мм, а
= 20°, = 27, = 4мм, а
= 20°, = 1, = 1,  =
0,25 . =
0,25 .
3. Формулы для геометрического расчета:
1) Минимальное число зубьев:  = = = = ; ;
2) Инволюта угла зацепления:   w
= inv
+ w
= inv
+ ; ;
3) Коэффициент воспринимаемого смещения:  = =  ; ;
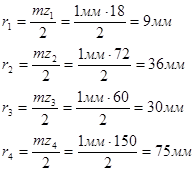
4) Радиусы делительных окружностей:  = = ; ;
5) Радиусы основных окружностей: = =
 ; ;
6) Радиусы начальных окружностей:  = =
 ; ;
7) Радиусы окружностей вершин:  = =  ;
;
8) Коэффициент уравнительного смещения: ; ;
9) Радиусы окружностей впадин:  ; ;
10) Высота зуба:   ; ;
11) Межосевое расстояние: aw
=  ;
;
  ; ;
12) Толщины зубьев по делительным окружностям:
  ; ;
13) Толщины зубьев по окружностям вершин:

 
14) Коэффициент перекрытия:
  
4. Расчет - выполнен по программе, распечатка результатов прилагается.
5. Выбор коэффициента смещения х1
:
Коэффициент смещения первого колеса выбирается, исходя из трех условий:
1) Отсутствие подреза: ; ;
2) Отсутствие заострения:  ; ;
3) Обеспечение плавности: . .
Были построены графики зависимостей  и по ним выбран коэффициент смещения и по ним выбран коэффициент смещения . Графики зависимостей прилагаются. . Графики зависимостей прилагаются.
6. Выбор масштаба: Высота зуба на чертеже 

7. Построение картины зацепления:
1) Линия центров  (межосевое расстояние). (межосевое расстояние).
2) Начальные окружности  касаются в точке Р (полюс). касаются в точке Р (полюс).
3) Основные окружности  , линия зацепления, касательная к , линия зацепления, касательная к  и и , проходит через точку Р. , проходит через точку Р.
4) Делительные окружности  , расстояние между которыми равно , расстояние между которыми равно  (воспринимаемое смещение). (воспринимаемое смещение).
5) Окружности вершин  и окружности впадин и окружности впадин  , расстояние между , расстояние между  и и   равно равно  (стандартный радиальный зазор).
(стандартный радиальный зазор).
6) Построение эвольвенты: Эвольвента боковой поверхности зуба строится методом обкатывания прямой по основной окружности  : :
а) Раствором измерителя  на основной окружности на основной окружности  сделать сделать  последовательных отметок и последовательных отметок и
провести через отмеченные точки радиусы;
б) Через точки провести касательные к основной окружности , определяющие промежуточные провести касательные к основной окружности , определяющие промежуточные
положения производящей прямой;
в) Тем же раствором измерителя на этих касательных отложить столько отрезков, каков номер касательной;
г) Соединить плавной кривой полученные точки.
7) Построить ось зуба, для этого: по окружностям делительной  и вершин r
a
отложить соответствующие толщины зуба и через их середины провести ось зуба. Проверка: ось должна пройти через центр колеса. и вершин r
a
отложить соответствующие толщины зуба и через их середины провести ось зуба. Проверка: ось должна пройти через центр колеса.
8) Если (
rb
-
rf
)>0,4
m
,
то из основания эвольвенты на основной
окружности провести прямую, параллельную оси зуба, радиусом  , сделать сопряжение этой прямой с oкружностью впадин rf
. Если , сделать сопряжение этой прямой с oкружностью впадин rf
. Если , то радиусом , то радиусом  сделать сопряжение эвольвенты с окружностью впадин rf
. При этом часть эвольвенты внизу потеряется. сделать сопряжение эвольвенты с окружностью впадин rf
. При этом часть эвольвенты внизу потеряется.
Реклама

В данном расчете:
 , ,

9) По построенным половинам зубьев сделать лекала. Первый зуб второго колеса построить, совместив соответствующее лекало с линией центров. Второй и третий зуб построить, определив шаг
по формуле:  , где , где  . Для построения двух зубьев первого колеса, их необходимо вписать в зацепление с зубьями второго колеса, после чего произвести проверку, измерив шаг. . Для построения двух зубьев первого колеса, их необходимо вписать в зацепление с зубьями второго колеса, после чего произвести проверку, измерив шаг.
В данном расчете:  , ,
 
8. Выполняется проверка, вписывается ли зуб, построенный методом обкатывания колеса по основной окружности в реечный
инструмент.
9. Выполняется графическая проверка коэффициента перекрытия и
Определяется погрешность по формулам:
где  -
угловой шаг, -
угловой шаг,  - хорда, соответствующая угловому шагу (измеряется на чертеже). В данном расчете: - хорда, соответствующая угловому шагу (измеряется на чертеже). В данном расчете:

10. Выводы
: Выполнен геометрический расчет эвольвентной зубчатой передачи, назначены коэффициенты смещения  и и , которые удовлетворяют условиям отсутствия заострения, отсутствия подреза и обеспечения плавности. Выполнена графическая проверка коэффициента перекрытия (погрешность , которые удовлетворяют условиям отсутствия заострения, отсутствия подреза и обеспечения плавности. Выполнена графическая проверка коэффициента перекрытия (погрешность  ) )
П. Проектирование планетарного редуктора
1.
Цель
: Рассчитать числа зубьев колес планетарного редуктора по заданному передаточному отношению.
2. Исходные данные: Двухрядный планетарный редуктор с двумя внутренними зацеплениями, передаточное отношение  , число сателлитов , число сателлитов 
3. Подбор чисел зубьев колес методом сомножителей:
1) Передаточное отношение планетарного механизма:  ; ;
2) Выражение дроби  и представление ее в виде отношения произведения сомножителей:
и представление ее в виде отношения произведения сомножителей:

Необходимо выбрать один из возможных вариантов, удовлетворяющий всем условиям проектирования планетарных редукторов, а также наиболее подходящий по соображениям габаритности.
3) Проверка выполнения условия соосности:
Для данногомеханизма  . Запись условия соосности через множители: . Запись условия соосности через множители:
 
Для данного расчета:
1 вар.:  ; ;
2 вар.:  ; ;
3 вар.:  . .
Получим: 1 вар.: 3+12=25-10 15=15- условие выполняется; 15=15- условие выполняется;
2 вар.: 4+8=15-312=12- условие выполняется;
3 вар.: 8+16=30-6 24=24- условие выполняется.
4) Выполнение условия правильного зацепления:
Для данного механизма внутренний зуб:  .
Если эти условия не выполняются, то полученные числа зубьев надо умножить на множитель .
Если эти условия не выполняются, то полученные числа зубьев надо умножить на множитель  . .
1 вар.: 
2 вар.: 
3 вар.: 
Тогда получим: 1 вар.:  -условие выполняется; -условие выполняется;
2 вар.:  - условие не выполняется; - условие не выполняется;
3 вар.:  - условие не выполняется. - условие не выполняется.
5) Выполнение условия соседства:
Для данного механизма должно выполняться неравенство: , где , где  - число зубьев большего сателлита. Для данного расчёта: - число зубьев большего сателлита. Для данного расчёта:
 - условие выполняется. - условие выполняется.
6) Выполнение условия сборки:
 , где , где  - целые числа. - целые числа.
Для данного расчёта:
 - целое условие выполняется при всех - целое условие выполняется при всех 
Все проверки выполняются. Принимаем:

Изображение схемы планетарного редуктора: Полагая, что модуль колес  : :
Масштаб: 
5. Выполнение графического исследования - проверка передаточного отношения:
1) Обозначить характерные точки - оси колес и полюсы зацепления (А -
ось первого колеса, В -
полюс зацепления первого и второго колес, С - ось второго и третьего колес, D
-
полюс зацепления третьего и четвертого колес).
2) Характерные точки перенести на вертикальную ось радиусов и построить картину распределения линейных скоростей. Для этого провести отрезок ВВ'
произвольной длины, изображающий в масштабе скорость точки В; АВ' -
линия распределения скоростей первого колеса; точка D
-
мгновенный центр скоростей третьего колеса; B
'
D
-
линия распределения скоростей второго и третьего колес (блока сателлитов); СС -
изображает в масштабе скорость точки С; АС -
линия распределения скоростей водила Н.

3) Построить план угловых скоростей. Для этого провести горизонтальную линию угловых скоростей. Из полюса Р,
взятого на произвольном расстоянии КР
от линии угловых скоростей, провести лучи параллельные линиям распределения скоростей звеньев.
 , ,
отрезки  и и  измеряются на чертеже в миллиметрах. измеряются на чертеже в миллиметрах.
Для данного расчета: 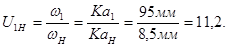
4. Выводы: Рассчитаны числа зубьев колес  , которые удовлетворяют условиям: сборки, соосности, соседства, правильного зацепления. И выполнена графическая проверка передаточного отношения , которые удовлетворяют условиям: сборки, соосности, соседства, правильного зацепления. И выполнена графическая проверка передаточного отношения  .
.
ЛИСТ 2.
Динамическое исследование основного механизма
1. Цель:
Рассчитать маховик, который обеспечит заданную неравномерность вращения механизма  , и определить закон движения начального звена. , и определить закон движения начального звена.
2. Исходные данные:
1) Отношение длины шатуна к длине кривошипа:  ; ;
2) Отношение расстояния от точки  до центра тяжести шатуна до центра тяжести шатуна  к длине шатуна: к длине шатуна:  ; ;
3) Средняя скорость поршня:  ; ;
4) Номинальное число оборотов вала электродвигателя:  ; ;
5) Максимальное давление плунжера:  ; ;
6) Минимальное давление плунжера:  ; ;
7) Масса шатуна:  ; ;
8) Масса поршня:  ; ;
9) Момент инерции шатуна:  ; ;
10) Момент инерции коленчатого вала (без маховика):  ; ;
11) Маховой момент ротора электродвигателя:  ; ;
12)Коэффициент неравномерности вращения коленчатого вала:  ; ;
13) Маховой момент муфты:  ; ;
14) Момент инерции редуктора, приведённый к валу:  . .
3. Построение плана основного механизма:
1) Определение основных размеров звеньев механизма по заданным условиям (средняя скорость поршня, число оборотов коленчатого вала, отношение длины шатуна к длине кривошипа):
 ; ;  ; ;
 . .
Для данного расчёта :  длина кривошипа. длина кривошипа.
 . .
Для данного расчета:  - длина шатуна. - длина шатуна.  - расстояние от точки до центра тяжести шатуна. - расстояние от точки до центра тяжести шатуна.
2) Выбор масштаба:  . .
3) Построение плана механизма в 12-и положениях: угловая координата кривошипа  во всех положениях кратна 30° . во всех положениях кратна 30° .
4. Построение планов скоростей для всех 12-и положений:
1) Для каждого положения механизма построить план скоростей, задав произвольный постоянный отрезок  , соответствующий скорости точки , соответствующий скорости точки  . .
2) Вектор скорости точки С определить по векторной формуле:  , где вектор скорости точки С , где вектор скорости точки С  направлен по направляющей, вектор скорости точки В направлен по направляющей, вектор скорости точки В  - перпендикулярно АВ, вектор скорости точки С относительно точки В - перпендикулярно АВ, вектор скорости точки С относительно точки В  - -
перпендикулярно  . .
3) Вектор скорости точки  определить по правилу подобия: точки, принадлежащие одному звену на схеме механизма и концы векторов скоростей этих точек на плане скоростей, образуют подобные фигуры. определить по правилу подобия: точки, принадлежащие одному звену на схеме механизма и концы векторов скоростей этих точек на плане скоростей, образуют подобные фигуры.
4) Построить проекции векторов скоростей точек и  на ось у . на ось у .
5. Построение диаграмм зависимостей аналогов скоростей точек механизма и передаточного отношения  от положения механизма от положения механизма  : :
1) Определить значения проекции аналога скорости точки на ось  для всех положений механизма: для всех положений механизма:  , где , где  и и  - отрезки плана скоростей, соответствующие проекции скорости точки - отрезки плана скоростей, соответствующие проекции скорости точки  на ось и скорости точки соответственно ( на ось и скорости точки соответственно ( для всех положений механизма). для всех положений механизма).
2) Определить значения аналога скорости точки для всех положений механизма:  , где , где  - отрезок плана скоростей, соответствующий скорости точки . - отрезок плана скоростей, соответствующий скорости точки .
3) Определить значения проекции аналога скорости точки на ось для всех положений механизма:  , где , где  - отрезок плана скоростей, соответствующий скорости точки на ось . - отрезок плана скоростей, соответствующий скорости точки на ось .
4) Определить значения передаточного отношения  для всех положений механизма: для всех положений механизма:  , где , где  - отрезок плана скоростей, соответствующий скорости относительно точки В. - отрезок плана скоростей, соответствующий скорости относительно точки В.
5) Значения, полученные для данного расчета, занесены в таблицу:
Таблица № 1.
| Положение
механизма
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
| 
|
0
|
35
|
48
|
50
|
37
|
20
|
0
|
-20
|
-37
|
-50
|
-48
|
-35
|
0
|
| 
|
37
|
42
|
47
|
51
|
46
|
40
|
37
|
40
|
46
|
51
|
47
|
42
|
37
|
| 
|
37
|
31
|
19
|
0
|
-17
|
-32
|
-37
|
-32
|
-17
|
0
|
19
|
31
|
37
|
| 
|
50
|
45
|
28
|
0
|
26
|
43
|
50
|
43
|
26
|
0
|
28
|
45
|
50
|
| 
|
0
|
0,056
|
0,077
|
0,082
|
0,059
|
0,032
|
0
|
-0,032
|
-0,059
|
-0,082
|
-0,077
|
-0,056
|
0
|
| 
|
0,059
|
0,05
|
0,03
|
0
|
-0,027
|
-0,051
|
-0,059
|
-0,051
|
-0,027
|
0
|
0,05
|
0,03
|
0,059
|
|
|
-0,21
|
-0,19
|
-0,12
|
0
|
0,11
|
0,18
|
0,21
|
0,18
|
0,11
|
0
|
-0,12
|
-0,19
|
-0,21
|
| 
|
0,059
|
0,067
|
0,075
|
0,082
|
0,074
|
0,064
|
0,059
|
0,064
|
0,074
|
0,082
|
0,075
|
0,067
|
0,059
|
6) Выбор масштабов для диаграмм:
а) Масштаб для положений механизма:  . .
б) Масштаб для аналогов скоростей и их проекций на ось :
 . .
в) Масштаб для передаточного отношения :
7) Построение диаграмм зависимостей аналогов скоростей точек механизма и передаточного отношения от положения механизма  в соответствии с выбранными масштабами. в соответствии с выбранными масштабами.
8) Выбор масштаба:
 . .
9) Строится индикаторная диаграмма в соответствии с выбранным
масштабом.
7. Построение графика зависимости проекции силы  на ось у
от положения механизма на ось у
от положения механизма  : :
1) В координатах  по оси отложить значения по оси отложить значения  в миллиметрах для каждого положения механизма, приняв ур
= хр
индикаторной диаграммы компрессора. в миллиметрах для каждого положения механизма, приняв ур
= хр
индикаторной диаграммы компрессора.
2) По полученным точкам построить график.
3) Расчет масштаба силы: Р
=  , где Р -
сила, , где Р -
сила,  - давление, - давление,  -
площадь поршня; -
площадь поршня;  . .
4) Выбор масштаба для положений механизма:
 - этот масштаб будет использоваться также для построения всех остальных графиков и диаграмм. - этот масштаб будет использоваться также для построения всех остальных графиков и диаграмм.
В качестве динамической модели принимаем начальное звено - кривошип 1. Параметрами динамической модели являются приведённый момент сил  и приведённый момент инерции и приведённый момент инерции  , действие которых эквивалентно действию реальных сил и масс. , действие которых эквивалентно действию реальных сил и масс.
1) Построение графиков приведенных моментов сил:
а) Определение суммарного приведенного момента сил для каждого из 12-ти положений механизма:  , где , где  - приведенный момент силы сопротивления, - приведенный момент силы сопротивления,  и и  -
приведенные моменты сил тяжестей поршня и шатуна соответственно. -
приведенные моменты сил тяжестей поршня и шатуна соответственно.
б) Приведенные моменты  находятся из равенства мгновенных мощностей модели и механизма: находятся из равенства мгновенных мощностей модели и механизма:
 , для данного расчёта: , для данного расчёта:  , где , где  - проекция силы сопротивления на ось у,
таким же способом определяются моменты - проекция силы сопротивления на ось у,
таким же способом определяются моменты  и и  , где , где  -
проекции сил тяжести поршня и шатуна соответственно на ось у . -
проекции сил тяжести поршня и шатуна соответственно на ось у .
в) Выбор масштаба:
 . .
г) Полученные для данного расчета приведенные моменты сил занесены в таблицу № 2:
Таблица№2.
| Полож
Мех-ма
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
|  ,H ,H
|
-1570
|
-1570
|
-1570
|
-1570
|
-1570
|
-1570
|
|
17270
|
17270
|
17270
|
17270
|
17270
|
17270
|
| 
мм
|
0
|
88
|
121
|
129
|
93
|
50
|
0
|
-553
|
-1019
|
-1416
|
-1330
|
-967
|
0
|
| 0
|
-8,8
|
-12,1
|
-12,9
|
-9,3
|
-5
|
0
|
-55,3
|
-101,9
|
-141,6
|
-133
|
-96,7
|
0
|
|
мм
|
4,6
|
3,92
|
2,35
|
0
|
-2,12
|
-4
|
-4,6
|
-4
|
-2,12
|
0
|
2,35
|
3,92
|
4,6
|
| 0,46
|
0,392
|
0,235
|
0
|
-0,212
|
-0,4
|
-0,46
|
-0,4
|
-0,212
|
0
|
0,235
|
0,392
|
0,46
|
д) По данным таблицы строятся графики зависимостей приведенных моментов сил от положения механизма .
Примечание: так как значения приведенных моментов  в данном расчёте много меньше, чем значения приведённого момента в данном расчёте много меньше, чем значения приведённого момента  , то на чертеже график считается совпадающим с осью абсцисс, таким образом, графически принимается суммарный момент , то на чертеже график считается совпадающим с осью абсцисс, таким образом, графически принимается суммарный момент
 . .
2) Построение графиков приведенных моментов инерции второй группы звеньев:
а) Приведенные моменты инерции находятся из равенства кинетических энергий модели и механизма: 
 . .
Для звена 2:
 ; ;  , где , где  - -
приведённый поступательный момент инерции 2-го звена,
 —
приведенный вращательный момент инерции 2-го звена. —
приведенный вращательный момент инерции 2-го звена.
в) Выбор масштаба:
 . .
Таблица№3.
| Полож
Мех-ма
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
|  

|
0
|
0,06
|
0,12
|
0,13
|
0,07
|
0,02
|
0
|
0,02
|
0,07
|
0,13
|
0,12
|
0,06
|
0
|
| 0
|
60
|
120
|
130
|
70
|
20
|
0
|
20
|
70
|
130
|
120
|
60
|
0
|
|  
|
0,028
|
0,036
|
0,045
|
0,053
|
0,044
|
0,033
|
0,028
|
0,033
|
0,044
|
0,053
|
0,045
|
0,036
|
0,028
|
| 28
|
36
|
45
|
53
|
44
|
33
|
28
|
33
|
44
|
53
|
45
|
36
|
28
|
| 
|
0,0069
|
0,0057
|
0,0023
|
0
|
0,0019
|
0,0051
|
0,0069
|
0,0051
|
0,0019
|
0
|
0,0023
|
0,0057
|
0,0069
|
| 6,9
|
5,7
|
2,3
|
0
|
1,9
|
5,1
|
6,9
|
5,1
|
1,9
|
0
|
2,3
|
5,7
|
6,9
|
г) По данным таблицы строятся графики зависимостей приведенных моментов инерции второй группы звеньев от положения механизма  . .
д) График суммарного приведенного момента инерции второй группы звеньев  строится путем сложения графиков всех моментов инерции второй группы звеньев. строится путем сложения графиков всех моментов инерции второй группы звеньев.
9. Построение графика суммарной работы:
1) Работа сил сопротивления определяется по формуле: 
Таким образом, график работы сил сопротивления строится методом графического интегрирования графика зависимости  от положения механизма
от положения механизма  . .
2) Так как рассматривается установившееся движение, то выполняется равенство  , где , где  - значение работы движущих сил за цикл работы в 12-ом положении, момент движущих сил принимаем постоянным, поэтому график работы движущих сил представляет собой наклонную прямую, значение которой в 0-ом положении равно 0, а в 12-ом положении равно - значение работы движущих сил за цикл работы в 12-ом положении, момент движущих сил принимаем постоянным, поэтому график работы движущих сил представляет собой наклонную прямую, значение которой в 0-ом положении равно 0, а в 12-ом положении равно  . .
3) График суммарной работы  строится путем сложения графиков работы сил сопротивления и работы движущих сил. строится путем сложения графиков работы сил сопротивления и работы движущих сил.
3) Определение масштаба:
 , ,
4) где OP- отрезок, используемый для интегрирования графика . Для данного расчёта:
 . .
10. График кинетической энергии второй группы звеньев:
1) График суммарного приведенного момента инерции второй группы звеньев  может приближенно быть принят за график кинетической энергии второй группы звеньев может приближенно быть принят за график кинетической энергии второй группы звеньев :
так как :
так как  , а , а  - малая величина - малая величина  , то , то  = = , где , где  ( средняя угловая скорость 1-го звена) определяется по формуле: ( средняя угловая скорость 1-го звена) определяется по формуле:  ~. Для данного расчёта: ~. Для данного расчёта:  . .
2) Определение масштаба:  . Для расчёта: . Для расчёта:  . .
11. Определение закона движения начального звена:
1) Так как суммарная работа всех сил, приложенных к механизму( ), идёт на изменение кинетической энергии, то график кинетической энергии ), идёт на изменение кинетической энергии, то график кинетической энергии  имеет такой же вид, как и график суммарной работы , но необходимо учесть начальную кинетическую энергию имеет такой же вид, как и график суммарной работы , но необходимо учесть начальную кинетическую энергию  . В соответствии с теоремой об изменении кинетической энергии . В соответствии с теоремой об изменении кинетической энергии  , таким образом, ось абсцисс для графика , таким образом, ось абсцисс для графика  будет отстоять вниз от оси абсцисс для графика будет отстоять вниз от оси абсцисс для графика  на расстоянии на расстоянии 
2) Закон движения ведущего звена определяется кинетической энергией первой группы звеньев. Кинетическая энергия всего механизма равна сумме кинетических энергий первой и второй групп звеньев: .
Следовательно, вычитая из графика кинетической энергии всего механизма Т
кинетическую энергию второй группы звеньев .
Следовательно, вычитая из графика кинетической энергии всего механизма Т
кинетическую энергию второй группы звеньев  , приведенную к масштабу работы, строится график кинетической энергии первой группы звеньев , приведенную к масштабу работы, строится график кинетической энергии первой группы звеньев  .
Значения ординат для 12-ти положений механизма в масштабе .
Значения ординат для 12-ти положений механизма в масштабе   и в масштабе
и в масштабе   для данного расчета приведены в таблице № 4 ( для данного расчета приведены в таблице № 4 ( определяется по формуле:
определяется по формуле:  ). ).
| Положение
механизма
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
| 
|
35
|
102
|
167
|
183
|
116
|
58
|
35
|
58
|
116
|
183
|
167
|
102
|
35
|
| 
|
0,18
|
0,51
|
0,8
|
0,9
|
0,58
|
0,3
|
0,18
|
0,3
|
0,58
|
0,9
|
0,8
|
0,51
|
0,18
|
Таблица №4.
12. Расчет размеров маховика.
1)Необходимый момент инерции звеньев первой группы, который обеспечит заданную неравномерность вращения (δ), рассчитывается по формуле:
 . .
Имеющийся момент инерции:
 , где , где , ,
 . .
На основании равенства кинетических энергий
 : : 
Необходимо установить маховик, момент инерции которого определяется по формуле:

2) Определение размеров маховика

Приведенный момент инерции обода можно рассчитать также по формуле:
 . .
Рекомендуемое соотношение размеров:  ; ;  . .
Плотности материала: стали -  ; чугуна - ; чугуна -  . .
При расчете D необходимо учитывать соотношение:  , ,
т.е.  (*). (*).
Предположим, что d = 0.9D,а b = 0.1D, материал – чугун:
Соотношение (*) не выполняется, поэтому следует выбрать другие размеры. Пусть d=0.7D, b=0.3D, материал – чугун:
Соотношение (*) не выполняется, поэтому следует выбрать другие размеры. Пусть d=0.9D, b=0.1D, материал –сталь:
Соотношение (*) не выполняется, поэтому следует выбрать другие размеры. Пусть d=0.7D, b=0.3D, материал –сталь:
Так как размеры маховика превышают размеры шатуна, то его устанавливаем на быстроходный вал. Таковым является входной вал редуктора. На основании равенства кинетической энергии :
Предположим, что d = 0.9D, b = 0.1D, материал – чугун:
 . .
Все необходимые условия выполняются, поэтому  , ,  , ,  , материал, из которого изготовлен маховик, – чугун. , материал, из которого изготовлен маховик, – чугун.
Определение масштаба:
 . .
|
