| Исходные данные
1. Плоские рычажные механизмы

Дано:         
а) структурный анализ плоского рычажного механизма
б) синтез кинематической схемы плоского рычажного механизма
2. Кинематический анализ плоского рычажного механизма
а) построение планов положений
б) построение планов скоростей и планов ускорений
в) определение значений и направлений угловых скоростей и угловых ускорений всех звеньев
3. Силовой анализ плоского рычажного механизма
а) составление расчетной схемы
б) метод кинетостатики для одного положения кривошипа
в) теорема Жуковского для того же положения звеньев
4. Динамический анализ плоского рычажного механизма
а) составление динамической модели
б) построение диаграмм 
в) вывод уравнения и построение диаграммы 
г) построение диаграммы энергия-масса
д) определение значения момента инерции маховой массы
Механизм с высшими кинематическими парами
5. Простой зубчатый механизм




а) структурный анализ простого зубчатого механизма
б) синтез эвольвентного зацепления простого зубчатого механизма
6. Сложные зубчатые механизмы




α = 20º

а) структурный анализ сложного зубчатого механизма
б) синтез кинематической схемы сложного зубчатого механизма
в) кинематический анализ сложного зубчатого механизма
7. Кулачковый механизм
а) структурный и кинематический анализы
б) определение радиуса исходного контура
в) синтез профилей кулачка
 
 ; ;

[ϑ]=45°
8. а) Завершение работ графической части
б) Оформление пояснительной записки
в) Защита КП
Содержание курсового проекта
1. Задание на курсовой проект
2. Структурный анализ плоского рычажного механизма
3. Кинематический анализ плоского рычажного механизма
4. Силовой анализ плоского рычажного механизма
5. Динамический анализ плоского рычажного механизма
6. Механизмы с высшими кинематическими парами
а) Зубчатые механизмы
б) Кулачковый механизм
7. Список литературы
1 Плоские рычажные механизмы
1.1 Структурный анализ
Для данного сложного рычажного механизма необходимо определить число степеней свободы (подвижность) и выполнить структурный анализ.
Число степеней свободы исследуемого механизма определим по формуле Чебышева:

где n
- число подвижных звеньев в составе исследуемой кинематической цепи;
 - число пар четвертого класса; - число пар четвертого класса;
 - число пар пятого класса; - число пар пятого класса;
Реклама

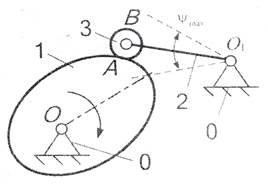
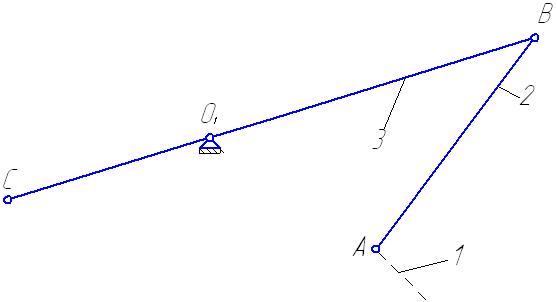
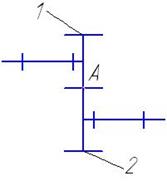
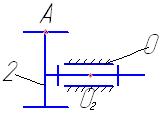
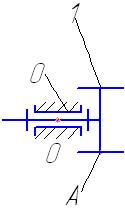
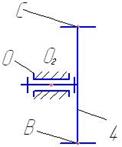
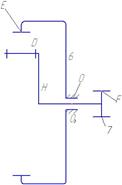
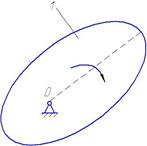
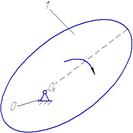
Рисунок 1
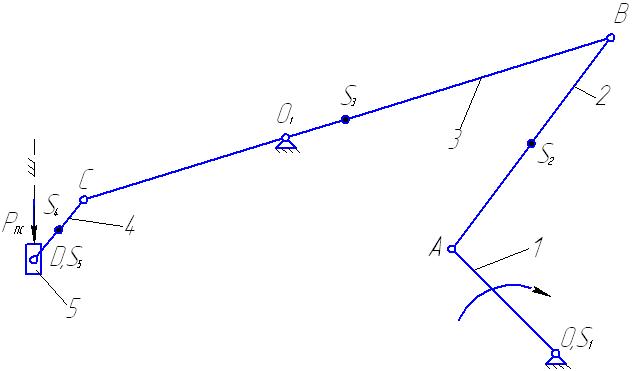 Для определения величины коэффициента n
проанализируем структурную схему механизма (рисунок 1). Для определения величины коэффициента n
проанализируем структурную схему механизма (рисунок 1).
Структурная схема механизма состоит из шести звеньев, рассмотрим движения каждого звена и занесем их в Таблицу 1- Звенья механизма:
Таблица 1 – Звенья механизма
| Вид движения
|
Название звена
|
№ звена
|
| неподвижное
|
стойка
|
0
|
| вращательное
|
кривошип
|
1
|
| сложное вращательное
|
шатун
|
2
|
| поступательное
|
коромысло
|
3
|
| поступательное
|
ползун
|
4
|
| поступательное
|
ползун
|
5
|
при этом звенья 1– 5 являются подвижными звеньями, а стойка 0 – неподвижным звеном. Она представлена в составе структурной схемы двумя направляющими ползуна и шарнирно-неподвижной опорой. Следовательно, n
=5.
Для определения коэффициентов и найдем все кинематические пары, входящие в состав рассматриваемой кинематической цепи. Результаты исследований заносим в Таблицу 2 – Кинематические пары.
Таблица 2 – Кинематические пары
| №
|
Номер звеньев/ название
|
Схема кинематической пары
|
Класс / подвижность
|
Вид контакта/замыкание
|
| 1
|
2
|
3
|
4
|
5
|
| 1
|
0 – 1/ вращательная
|

|
5/1
|
поверхность
(низшая)/
геометрическое
|
| 2
|
1 – 2/ вращательная
|

|
5/1
|
поверхность
(низшая)/
геометрическое
|
| 3
|
2–3/ вращательная
|
|
5/1
|
поверхность
(низшая)/
геометрическое
|
| 4
|
3–0/ вращательная
|
|
5/1
|
поверхность
(низшая)/
геометрическое
|
| 5
|
3–4/ вращательная
|
|
5/1
|
поверхность
(низшая)/
геометрическое
|
| 6
|
4 – 5/ вращательная
|
|
5/1
|
поверхность
(низшая)/
геометрическое
|
| 7
|
5 – 0/ поступательная
|
|
5/1
|
поверхность
(низшая)/
геометрическое
|
Из анализа данных табл. 2 следует, что исследуемый механизм состоит из семи пар пятого класса и образует замкнутую кинематическую цепь. Следовательно,  , а , а  . .
Подставив найденные значения коэффициентов n
,  и и  в формулу Чебышева, получим: в формулу Чебышева, получим:

Для выявления структурного состава механизма разбиваем рассматриваемую схему на структурные группы Ассура.
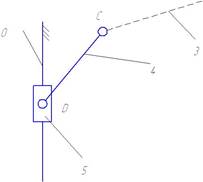
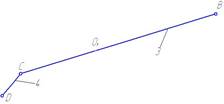
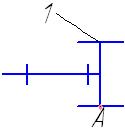
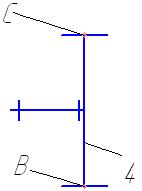
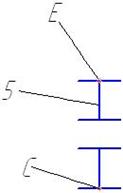
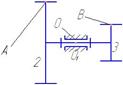
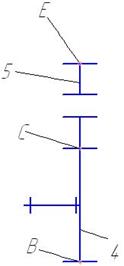
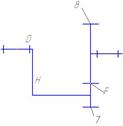
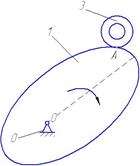
Рисунок 2
Группа звеньев 5 – 4 (рисунок 2). Данная группа состоит из двух подвижных звеньев:
шатун 4 и ползун 5;
двух поводков:
коромысло 3 и направляющая (стойка) 0:
и трех кинематических пар:
5 – 4 вращательная пара пятого класса;
4 – 3 вращательная пара пятого класса;
5 – 0 поступательная пара пятого класса; тогда  и и  . .
Подставив выявленные значения коэффициентов в формулу Чебышева, получим:

 Следовательно, группа звеньев 4-5 является структурной группой 2 класса (число подвижных звеньев n=2), 2 порядка (структурная группа имеет 2 поводка), 2 вида (ВВП). Следовательно, группа звеньев 4-5 является структурной группой 2 класса (число подвижных звеньев n=2), 2 порядка (структурная группа имеет 2 поводка), 2 вида (ВВП).
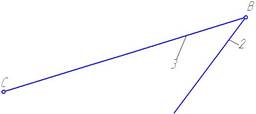
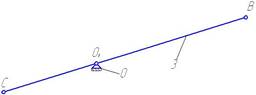
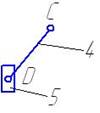
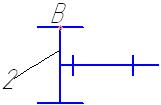
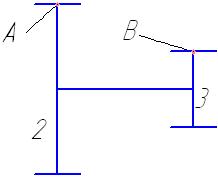
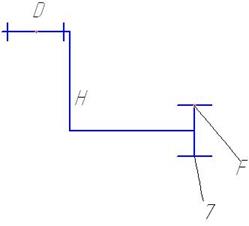
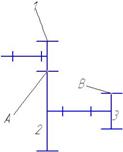
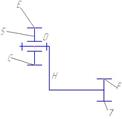
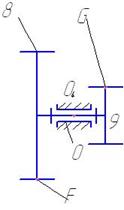
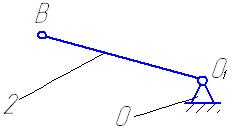
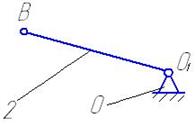
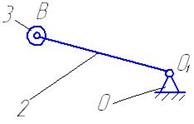
Рисунок 3
Группа звеньев 3 – 2 (рисунок 3). Данная группа состоит из двух подвижных звеньев: коромысло 3 и шатун 2; двух поводков: шатун 1 и стойка 0, и трех кинематических пар:
Реклама

3 – 2 вращательная пара пятого класса;
1 – 2 вращательная пара пятого класса;
3 – 0 поступательная пара пятого класса; тогда и .
Подставив выявленные значения коэффициентов в выражение получим:

Следовательно, структурная группа звеньев 2-3 является структурной группой 2 класса (число подвижных звеньев n=2), 2 порядка (структурная группа имеет 2 поводка), 1 вида (ВВВ).
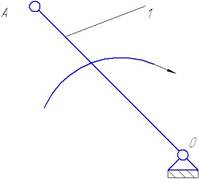
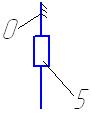
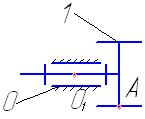
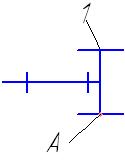
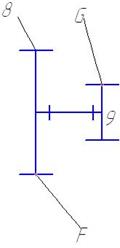
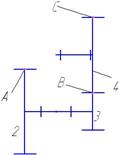
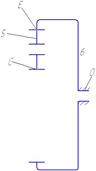
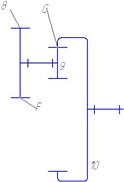
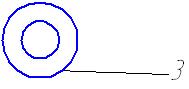
Рисунок 4
Группа звеньев 0 – 1 (рисунок 4). Данная группа состоит из подвижного звена кривошипа 1, стойки 0 и одной кинематической пары:
0 – 1 – вращательная пара пятого класса;
тогда  и и  . .
Подставляя найденные значения коэффициентов в формулу Чебышева, получим:

Данный результат означает, что для однозначного определения возможных положений звеньев данного механизма достаточно одной обобщенной координаты.
Следовательно, группа звеньев 0 – 1 не является структурной группой Ассура, а представляет собой первичный механизм, подвижность которого равна 1.
Из проведённого анализа следует, что подвижность данного сложного рычажного механизма равна 1; механизм имеет следующий структурный состав: первичный механизм с подвижностью равной 1 и две структурные группы 2 класса, 2 порядка, 1 и 2 вида.
Структурная формула механизма
Вывод:
Из проведенного анализа следует , что подвижность механизма равна 1. Механизм имеет следующий структурный состав: первичный механизм с подвижностью равной 1, и две структурные группы Ассура 2 класса, 2 порядка, 1 и 2 вида. Класс механизма определяется наивысшим классом структурной группы, входящей в его состав, следовательно данный механизм 2 класса.
2 Синтез кинематической схемы плоского рычажного механизма по заданным параметрам
Чтобы построить кинематическую схему плоского рычажного механизма по заданным параметрам, нужно найти масштабный коэффициент длины  , который рассчитывается по формуле: , который рассчитывается по формуле:

где  – действительная длина коромысла в метрах; – действительная длина коромысла в метрах;
 – размер коромысла в миллиметрах принимаемый на чертеже. – размер коромысла в миллиметрах принимаемый на чертеже.
Остальные размеры звеньев вычислим по формуле:

где i
– номер звена, для которого вычисляется длина на кинематической схеме.
Переходим к построению положения звеньев механизма.
Для этого на плоскости выбираем точку  . Относительно ее находим расположение точки . Относительно ее находим расположение точки  и линии, вдоль которой движется ползун. Из точки и линии, вдоль которой движется ползун. Из точки  радиусом радиусом  проводим окружность. Из точки проводим дуги окружностей радиусами проводим окружность. Из точки проводим дуги окружностей радиусами  и и  . Проводим отрезок . Проводим отрезок  , из точки А
-отрезок длиной , из точки А
-отрезок длиной  до пересечения с дугой окружности радиусом до пересечения с дугой окружности радиусом  . Затем из получившейся точки В
строим отрезок ВС = . Затем из получившейся точки В
строим отрезок ВС =
 , проходящий через - мы нашли точку С
. Из нее проводим прямую длиной , проходящий через - мы нашли точку С
. Из нее проводим прямую длиной  до пересечения с линией движения ползуна и в результате этого мы нашли точку D
. до пересечения с линией движения ползуна и в результате этого мы нашли точку D
.
3 Кинематический анализ
3.1 Построение 12-ти планов положений
Построим двенадцать положений механизма в масштабном коэффициенте  м/мм (лист 1). Чтобы найти крайние положения, надо из точки О
провести отрезки длиной м/мм (лист 1). Чтобы найти крайние положения, надо из точки О
провести отрезки длиной  (крайнее верхнее положение) до пересечения с дугой окружности радиусом и отрезок длинной (крайнее верхнее положение) до пересечения с дугой окружности радиусом и отрезок длинной  (крайнее нижнее положение). Верхнее положение кривошипа вдоль этой прямой и будет начальным положением. Каждое новое положение механизма получим поворотом кривошипа на 30 градусов в сторону вращения и повтором действий, описанных в пункте 1.2. (крайнее нижнее положение). Верхнее положение кривошипа вдоль этой прямой и будет начальным положением. Каждое новое положение механизма получим поворотом кривошипа на 30 градусов в сторону вращения и повтором действий, описанных в пункте 1.2.
3.2 Построение планов скоростей относительно 12-ти планов положений для седьмого положения механизма
Проанализируем полученную схему механизма: точка О
является неподвижной точкой, следовательно, модуль скорости этой точки равен нулю  . .
Вектор скорости точки А
представляет собой геометрическую сумму вектора скорости точки О
и скорости относительного вращательного движения точки А
вокруг О
:


где  – вектор скорости точки А
; – вектор скорости точки А
;
 – вектор скорости точки О
, взятой за полюс; – вектор скорости точки О
, взятой за полюс;
 – вектор скорости вращения точки А
вокруг точки О. – вектор скорости вращения точки А
вокруг точки О.
Линия действия вектора является перпендикуляром к оси кривошипа 1, а направление действия этого вектора совпадает с направлением вращения кривошипа 1.
Модуль скорости точки А:

где  – угловая скорость звена AO, – угловая скорость звена AO, ; ;
 – длинна звена АO, м; – длинна звена АO, м;
 – частота вращения звена АO, – частота вращения звена АO,

Зададим масштабный коэффициент скоростей 

где  – значение скорости вращения точки А
вокруг точки О
; – значение скорости вращения точки А
вокруг точки О
;
 – длина отрезка – длина отрезка  на плане скоростей, представляющая скорость на плане скоростей, представляющая скорость  на плане скоростей. на плане скоростей.
Примем масштабный коэффициент:
Выбираем в качестве полюса плана скоростей произвольную точку p
, проводим в выбранном масштабе вектор .
Для нахождения скорости точки В
рассмотрим вращательное движение второго звена, взяв за полюс точку А
. Тогда будем иметь:

где  – вектор неизвестной скорости точки В
. – вектор неизвестной скорости точки В
.
– вектор известной по величине и направлению скорость точки А
;
 – вектор скороси точки В
при её вращении вокруг точки А
. – вектор скороси точки В
при её вращении вокруг точки А
.
С другой стороны точка В
вращается вокруг  .
Следовательно скорость точки В
можно представить следующей формулой: .
Следовательно скорость точки В
можно представить следующей формулой:
где  . .
Решим графически векторное равенство и найдём величины  и и  . Для этого из конца вектора на плане скоростей проведём прямую, перпендикулярную прямой АВ
, а из полюса – прямую, перпендикулярную . Для этого из конца вектора на плане скоростей проведём прямую, перпендикулярную прямой АВ
, а из полюса – прямую, перпендикулярную  Точка пересечения этих прямых позволит найти величины и направление векторов и Точка пересечения этих прямых позволит найти величины и направление векторов и  . Измерив длины отрезков . Измерив длины отрезков  и и умножив их на масштабный коэффициент скоростей, в котором строится план скоростей, получим действительные значения и . и и умножив их на масштабный коэффициент скоростей, в котором строится план скоростей, получим действительные значения и .
Определим скорость точки С
, для этого воспользуемся формулой:
где  – длина отрезка – длина отрезка  на плане скоростей; на плане скоростей;
 – длина отрезка на плане скоростей; – длина отрезка на плане скоростей;
 – заданная длина отрезка – заданная длина отрезка  ; ;
 – заданная длина второго звена – заданная длина второго звена  . .
Отложим полученный отрезок на плане скоростей вдоль прямой  и направленный в противоположную сторону вектору . Скорость точки С
, будет равна: и направленный в противоположную сторону вектору . Скорость точки С
, будет равна:
Определим скорость точки D
, для этого составим векторное равенство:

где  – вектор неизвестной скорости точки D
, направленной вдоль прямой – вектор неизвестной скорости точки D
, направленной вдоль прямой  
 – вектор известной скорости точки C
; – вектор известной скорости точки C
;
 – вектор скорости точки D
при её вращении вокруг точки C
, направленной перпендикулярно DC – вектор скорости точки D
при её вращении вокруг точки C
, направленной перпендикулярно DC
 . .
Решим графически векторное равенство и найдём величины  и и  . .
Для этого из полюса на плане скоростей проведём прямую, параллельную прямой , а из конца вектора . – прямую, перпендикулярную CD
. Точка пересечения этих прямых позволит найти величины и направление векторов и  . Измерив длины отрезков pd
и . Измерив длины отрезков pd
и  и умножив их на масштабный коэффициент скоростей, в котором строится план скоростей, получим действительное значения и . и умножив их на масштабный коэффициент скоростей, в котором строится план скоростей, получим действительное значения и .
Определим угловые скорости  , ,  и и  звеньев 2, 3 и 4. Величины этих скоростей определяются из равенств: звеньев 2, 3 и 4. Величины этих скоростей определяются из равенств:
 (т.к. звено 5 – ползун совершает поступательное движение). (т.к. звено 5 – ползун совершает поступательное движение).
Направления действия угловых скоростей определим перенося в соответствующие точки вектора относительных скоростей этих точек с плана скоростей, предварительно мысленно закрепив другую точку этого звена.
Направление его действия и укажет направление вращения соответствующего звена.
Мы нашли значения и направления линейных  , ,  , ,  , ,  , ,  , ,  и угловых , , и и угловых , , и  скоростей для седьмого положения механизма. скоростей для седьмого положения механизма.
Строим планы скоростей для оставшихся положений механизма. Вычисляем действительные величины линейных и угловых скоростей для всех положений механизма и сводим их в таблицу.
Таблица 3 – Угловые и линейные скорости для двенадцати положений механизма
| Номер положе-ния меха-низма
|
Скорости точек,
|
Угловые скорости звеньев,
|
|
|
|

|

|

|

|
|

|

|
| 0,12
|
1,006
|
0
|
1,006
|
0
|
0
|
0
|
10,702
|
0
|
0
|
| 1
|
1,006
|
0.412
|
0,743
|
0,546
|
0,552
|
0,018
|
7,904
|
4,204
|
0,290
|
| 2
|
1,006
|
0.942
|
0,097
|
1,250
|
1,212
|
0,104
|
1,032
|
9,012
|
1,677
|
| 3
|
1,006
|
1.448
|
0,888
|
1,178
|
0,989
|
0,354
|
9,447
|
14,77
|
5,713
|
| 4
|
1,006
|
1.262
|
1,483
|
1,675
|
0,843
|
1,029
|
15,777
|
12,87
|
16,597
|
| 5
|
1,006
|
0,316
|
1,190
|
0,419
|
0,046
|
0,384
|
12,660
|
3,224
|
6,191
|
| 6
|
1,006
|
0,509
|
0,640
|
0,675
|
0,130
|
0,573
|
6,809
|
5,194
|
9,246
|
| 7
|
1,006
|
0,926
|
0,184
|
1,229
|
0,646
|
0,733
|
1,957
|
9,449
|
11,83
|
| 8
|
1,006
|
1,026
|
0,192
|
1,361
|
1,058
|
0,508
|
2,043
|
10,46
|
8,197
|
| 9
|
1,006
|
0,910
|
0,528
|
1,208
|
1,106
|
0,231
|
5,617
|
9,286
|
3,719
|
| 10
|
1,006
|
0,661
|
0,817
|
0,877
|
0,861
|
0,045
|
8,691
|
6,745
|
0,728
|
| 11
|
1,006
|
0,348
|
1,001
|
0461
|
0,466
|
0,017
|
10,649
|
3,551
|
0,274
|
| 13
|
1,006
|
0
|
1,006
|
0
|
0
|
0
|
10,702
|
0
|
0
|
3.3 Построение планов ускорений относительно 12-ти планов положений для седьмого положения механизма
Для построения плана ускорений составим векторные уравнения. Определение ускорений плоского рычажного механизма, также рассмотрим на примере седьмого положения. Вектор ускорения точки А
представляет собой геометрическую сумму вектора ускорения точки О
, вектора нормального ускорения и вектора тангенсального ускорения относительного вращательного движения точки А
вокруг точки О
:

Так как кривошип ОА
совершает равномерное вращательное движение  , то точка А
этого кривошипа будет иметь только нормальное ускорение, равное по величине: , то точка А
этого кривошипа будет иметь только нормальное ускорение, равное по величине:

Направлено ускорение  к оси вращения О
. к оси вращения О
.
Масштабный коэффициент ускорений:

где  – действительное значение нормального ускорения точки А
, при вращении вокруг точки О
; – действительное значение нормального ускорения точки А
, при вращении вокруг точки О
;
 – длина отрезка – длина отрезка  на плане ускорений, представляющая ускорение на плане ускорений, представляющая ускорение  на плане ускорений. на плане ускорений.
Примем масштабный коэффициент:
Выбираем в качестве полюса плана ускорений произвольную точку p
, из точки π в выбранном масштабном коэффициенте проведем вектор  . .
Рассмотрим плоское движение второго звена.

где  – вектор ускорения точки В
; – вектор ускорения точки В
;
 – вектор ускорения точки А
; – вектор ускорения точки А
;
 –вектор ускорения точки В
при её вращении вокруг точки А
. –вектор ускорения точки В
при её вращении вокруг точки А
.
Ускорение  можно представить в виде: можно представить в виде:

где  – вектор нормального ускорения точки В
при её вращении вокруг точки А
и равное: – вектор нормального ускорения точки В
при её вращении вокруг точки А
и равное:
 – вектор тангенциального ускорения точки В
при её вращении вокруг точки А
, направленное перпендикулярно радиусу вращения АВ
и равное: – вектор тангенциального ускорения точки В
при её вращении вокруг точки А
, направленное перпендикулярно радиусу вращения АВ
и равное:

Полное ускорение  можно записать так: можно записать так:

так как то  . .
Рассчитаем длину вектора  на плане ускорений: на плане ускорений:
В то же время точка В
вращается вокруг  . Тогда полное ускорение . Тогда полное ускорение  можно записать так: можно записать так:

где  – вектор ускорения точки – вектор ускорения точки  равное нулю. равное нулю.
 – нормальное ускорение точки В
при её вращении вокруг точки – нормальное ускорение точки В
при её вращении вокруг точки  и равное: и равное:
 – вектор тангенциального ускорения точки В
при её вращении вокруг точки – вектор тангенциального ускорения точки В
при её вращении вокруг точки  , направленное перпендикулярно радиусу вращения ОВ
и равное: , направленное перпендикулярно радиусу вращения ОВ
и равное:

Рассчитаем длину вектора  на плане ускорений: на плане ускорений:
Решим графически векторное равенство и найдём величины , и  . .
Из полюса на плане ускорений, в выбранном масштабе, проведем вектор . Из конца этого вектора порведём вектор  . Затем из конца вектора проведем прямую перпендикулярную отрезку АВ
. Из полюса проведем вектор . Затем из конца вектора проведем прямую перпендикулярную отрезку АВ
. Из полюса проведем вектор  , а из его конца- отрезок, перпендикулярный , а из его конца- отрезок, перпендикулярный  . Точка пересечения этих прямых позволит найти величины и направление векторов величины . Точка пересечения этих прямых позволит найти величины и направление векторов величины  , и . Измерив длины отрезков , и . Измерив длины отрезков  , ,  и и  и умножив их на масштабный коэффициент ускорений, в котором строится план ускорений, получим действительные значения и умножив их на масштабный коэффициент ускорений, в котором строится план ускорений, получим действительные значения  , и , и 
Определим ускорение  точки С
, воспользовавшись формулой: точки С
, воспользовавшись формулой:
где  – длина отрезка – длина отрезка  на плане ускорений; на плане ускорений;
 – длина отрезка – длина отрезка  на плане ускорений; на плане ускорений;
 – заданная длина звена – заданная длина звена  ; ;
 – заданная длина звена – заданная длина звена  . .
Отложим полученный отрезок  на плане ускорений на продолжении на плане ускорений на продолжении  , направленный в противоположную сторону последнего. Найдем заданное значение ускорения точки С
, то есть: , направленный в противоположную сторону последнего. Найдем заданное значение ускорения точки С
, то есть:
Вектор ускорения точки D
запишем следующей формулой:

где  – вектор ускорения точки D
; – вектор ускорения точки D
;
– вектор ускорения точки C
;
 – вектор нормального ускорение точки D
при её вращении вокруг точки C
и равное: – вектор нормального ускорение точки D
при её вращении вокруг точки C
и равное:
 – вектор тангенциального ускорение точки D
при её вращении вокруг точки C
, направленное перпендикулярно радиусу вращения CD
и равное: – вектор тангенциального ускорение точки D
при её вращении вокруг точки C
, направленное перпендикулярно радиусу вращения CD
и равное:

Рассчитаем длину вектора на плане ускорений:
Решим графически векторное равенство и найдём величины  и и 
Для этого из конца вектора  на плане ускорений проведём в выбранном масштабном коэффициенте вектор . Затем из конца вектора на плане ускорений проведём в выбранном масштабном коэффициенте вектор . Затем из конца вектора  проведем прямую перпендикулярную отрезку CD
, а из полюса прямую параллельную О
D
. Точка пересечения этих прямых позволит найти величины и направление векторов и проведем прямую перпендикулярную отрезку CD
, а из полюса прямую параллельную О
D
. Точка пересечения этих прямых позволит найти величины и направление векторов и  Измерив длины отрезков Измерив длины отрезков  и и  и умножив их на масштабный коэффициент ускорений, в котором строится план ускорений, получим истинные значения и и умножив их на масштабный коэффициент ускорений, в котором строится план ускорений, получим истинные значения и 
Найдём угловое ускорение второго звена, зная тангенциальное ускорение  точки B: точки B:
Найдём угловое ускорение третьего звена, зная тангенциальное ускорение  точки B: точки B:
Найдём угловое ускорение четвёртого звена, зная тангенциальное ускорение  точки D: точки D:
Направление действий угловых ускорений найдем следующим способом: переносим в соответствующие точки вектора относительных тангенсальных ускорений этих точек с плана ускорений, предварительно мысленно закрепив другую точку этого звена.
Направление его действия и укажет направление углового ускорения соответствующего звена.
Мы нашли значения и направления линейных и угловых ускорений, всех характерных точек и звеньев механизма для седьмого положения.
Строим планы ускорений для оставшихся положений механизма. Вычисляем истинные величины линейных и угловых ускорений для всех положений механизма и сводим их в таблицу.
Таблица 4 – Угловые и линейные ускорения точек звеньев для двенадцати положений механизма
| Номер положе-ния механизма
|
Ускорения точек,
|
Угловые ускорения звеньев,
|
| 
|

|

|

|

|

|

|

|

|

|

|

|

|
| 0,12
|
32,669
|
22,952
|
10,766
|
6,920
|
0
|
22,952
|
30,458
|
31,070
|
0
|
2,062
|
73,617
|
234,20
|
33,258
|
| 1
|
32,669
|
28,898
|
5,872
|
26,965
|
1,732
|
28,846
|
38,329
|
37,939
|
0,005
|
1,158
|
286,86
|
294,35
|
18,677
|
| 2
|
32,669
|
37,203
|
0,100
|
53,509
|
7,959
|
36,083
|
49,350
|
41,147
|
0,174
|
17,033
|
569,24
|
368,19
|
174,73
|
| 3
|
32,669
|
28,242
|
8,389
|
60,281
|
21,396
|
18,433
|
37,476
|
1,518
|
2,024
|
38,084
|
641,29
|
188,09
|
614,26
|
| 4
|
32,669
|
46,295
|
23,398
|
6,125
|
16,253
|
43,348
|
61,434
|
54,812
|
1,029
|
11,228
|
65,16
|
442,33
|
181,09
|
| 5
|
32,669
|
62,059
|
15,066
|
33,115
|
1,019
|
62,051
|
82,352
|
14,619
|
2,376
|
71,060
|
352,29
|
633,17
|
1146,1
|
| 6
|
32,669
|
380257
|
4,358
|
31,890
|
2,644
|
38,166
|
50,767
|
22,448
|
5,300
|
33,490
|
339,26
|
389,45
|
540,16
|
| 7
|
32,669
|
33,991
|
0,360
|
25,184
|
8,750
|
14,830
|
22,848
|
33,991
|
0,733
|
7,032
|
267,92
|
151,33
|
113,42
|
| 8
|
32,669
|
14,631
|
0,392
|
21,845
|
10,741
|
1,388
|
14,371
|
14,631
|
4,166
|
17,734
|
232,39
|
14,163
|
286,03
|
| 9
|
32,669
|
14,787
|
2,966
|
19,784
|
8,451
|
12,134
|
19,622
|
7,624
|
0,858
|
15,210
|
210,47
|
123,82
|
245,32
|
| 10
|
32,669
|
18,134
|
7,100
|
15,431
|
4,459
|
17,577
|
18,134
|
15,479
|
0,033
|
5,625
|
164,16
|
179,36
|
90,726
|
| 11
|
32,669
|
20,527
|
10,680
|
6,656
|
1,236
|
20,490
|
36,116
|
35,787
|
0,005
|
0,980
|
70,809
|
209,08
|
15,806
|
| 13
|
32,669
|
55,773
|
10,766
|
35,009
|
0
|
55,773
|
74,010
|
5,391
|
0
|
69,825
|
372,44
|
569,11
|
1126,2
|
Силовой анализ будем проводить кинетостатическим методом (в число заданных сил при расчёте входят силы инерции), при этом будем определять реакции в связях кинематических пар и уравновешивающую силу (уравновешивающий момент).
Построим в заданном масштабном коэффициенте длин седьмое положение механизма в масштабном коэффициенте длин Построим для него план ускорений.
Рассчитаем силы, действующие на звенья.
Сила тяжести  равна: равна:

где  – масса звена i
-го звена; – масса звена i
-го звена;
 – ускорение свободного падения, равное – ускорение свободного падения, равное 
Масса звена  равна: равна:

где  – удельная масса i
-го звена; – удельная масса i
-го звена;
 – длина i
-го звена. – длина i
-го звена.
Для кривошипов: 
Для шатунов:
Для коромысел: 
Масса ползуна: где – масса шатуна к которому прикреплён ползун.
Значит:





Центр масс кривошипа лежит на оси вращения кривошипа, шатуна – на середине его длины, коромысла– на звене  на расстоянии 0,016м от точки на расстоянии 0,016м от точки  . .
Откладываем вектора сил тяжести      на положении механизма соответственно от точек на положении механизма соответственно от точек     
Определим силы инерции звеньев.
Сила инерции  может быть определена по формуле: может быть определена по формуле:
где – вектор силы инерции i
-го звена;
 – масса i
-го звена; – масса i
-го звена;
 – вектор полного ускорения центра масс – вектор полного ускорения центра масс  i
-го звена. i
-го звена.
Как видно из формулы  и равна по величине и равна по величине
 . .
Момент  пары сил инерции направлен противоположно угловому ускорению пары сил инерции направлен противоположно угловому ускорению  и может быть определён по формуле: и может быть определён по формуле:
где  – момент инерции звена относительно оси, проходящей через центр масс – момент инерции звена относительно оси, проходящей через центр масс  и перпендикулярной к плоскости движения звена; и перпендикулярной к плоскости движения звена;
 – угловое ускорение звена. – угловое ускорение звена.
Момент инерции шатунов определится по формуле:

Определим из плана ускорений ускорения    
Рассчитаем силы инерции:
Построим на чертеже положений механизма силы инерции.
Рассчитаем моменты инерции второго, третьего и четвёртого звеньев:

Рассчитаем моменты пар сил инерции для второго, третьего и четвёртого звеньев:



Покажем на чертеже моменты пар сил инерции второго, третьего и четвёртого звеньев и данные силы полезного сопротивления.
Теперь необходимо сделать расчленение механизма. Силовой расчёт начинают с наиболее удалённой от первичного механизма структурной группы Ассура.
Рассмотрим структурную группу Ассура 4-5. Запишем уравнение кинетостатического равновесия:


Здесь  и и  – силы реакций, приложенные соответственно к звеньям 5 и 4 со стороны звеньев, образующих кинематические пары. – силы реакций, приложенные соответственно к звеньям 5 и 4 со стороны звеньев, образующих кинематические пары.
Запишем уравнение суммы моментов относительно точки D
:



Таким образом, в уравнении осталось две неизвестных силы, их можно определить составлением векторного силового многоугольника. Для его составления воспользуемся выражением.
Масштабный коэффициент сил  : :
где  – действительное значение известной максимальной силы, входящей в уравнение; – действительное значение известной максимальной силы, входящей в уравнение;
 – длина этой силы на плане скоростей. – длина этой силы на плане скоростей.
Примем масштабный коэффициент сил:
Строим многоугольник сил, для этого, сначала рассчитаем длины векторов сил на плане сил:
Из произвольной точки строим вектор  , потом из конца этого вектора вектор , потом из конца этого вектора вектор  и так далее. Завершают многоугольник сил, проводя из начала вектора и так далее. Завершают многоугольник сил, проводя из начала вектора  прямую параллельную CD
, а из конца вектора прямую параллельную CD
, а из конца вектора  прямую перпендикулярную DO
. Точка пересечения этих прямых позволяет построить силы прямую перпендикулярную DO
. Точка пересечения этих прямых позволяет построить силы  и и  на плане сил и определить их истинное значение. на плане сил и определить их истинное значение.
Рассмотрим структурную группу Ассура 2-3. Запишем уравнение кинетостатического равновесия:

Здесь  и и  – силы реакций, приложенные к звену 3 со стороны стойки, – силы реакций, приложенные к звену 3 со стороны стойки,  – силы реакций, приложенные к звену 2 со стороны звена образующую кинематическую пару. – силы реакций, приложенные к звену 2 со стороны звена образующую кинематическую пару.
Сила реакции со стороны четвёртого звена на третье:

Запишем уравнение суммы моментов третьего звена относительно точки В
:




Теперь запишем уравнение суммы моментов второго звена относительно точки В
:



Примем масштабный коэффициент сил, для плана сил группы Ассура 2-3:
Строим многоугольник сил, для этого, сначала рассчитаем длины векторов сил на плане сил:
Из произвольной точки строим вектор  , потом из конца этого вектора вектор , потом из конца этого вектора вектор  и так далее. Завершают многоугольник сил, проводя из начала вектора и так далее. Завершают многоугольник сил, проводя из начала вектора  прямую, параллельную АВ
, а из конца вектора прямую, параллельную АВ
, а из конца вектора  прямую, параллельную С
B
. Точка пересечения этих прямых позволяет построить силы прямую, параллельную С
B
. Точка пересечения этих прямых позволяет построить силы  и и  на плане сил и определить их действительное значение. на плане сил и определить их действительное значение.

4.3 Силовой анализ начального звена.
Рассмотрим первичное звено. Запишем уравнение кинетостатического равновесия:
Для нахождения тангенциальной составляющей силы  составим уравнение суммы моментов относительно точки А
: составим уравнение суммы моментов относительно точки А
:

Из уравнения выразим тангенциальную составляющую силы  : :

Запишем уравнение суммы моментов относительно точки O
:

Примем масштабный коэффициент сил, для плана сил первичного механизма:
Строим многоугольник сил, для этого, сначала рассчитаем длины векторов сил на плане сил:

Из произвольной точки строим вектор  , потом из конца этого вектора вектор . Вектора , потом из конца этого вектора вектор . Вектора  и и  не строим вследствии их незначительной величины. Завершают многоугольник сил, соединяя конец вектора и начало вектора не строим вследствии их незначительной величины. Завершают многоугольник сил, соединяя конец вектора и начало вектора  . Найдем величину силы . Найдем величину силы  . .
Момент управляющего воздействия:
Сведем все полученные силы и моменты в таблицу 5.
Таблица 5
| Силы тяжести звеньев, Н
|

|
2,48
|
| 
|
10,34
|
| 
|
72,96
|
| 
|
6,82
|
| 
|
4,09
|
| Силы инерции звеньев, Н
|

|
23,639
|
| 
|
20,538
|
| 
|
19,38
|
| 
|
13,902
|
| Моменты пар сил инерции звеньев, Н·м
|

|
0,2143
|
| 
|
4,7820
|
| 
|
0,0227
|
| Реакции связей, Н
|

|
417,412
|
| 
|
9,567
|
| 
|
417,522
|
| 
|
834,738
|
| 
|
709,878
|
| 
|
1095.825
|
| 
|
692,137
|
| 
|
692,127
|
| 
|
3,931
|
| 
|
749,740
|
| 
|
407,469
|
| Уравновешивающая сила, Н
|
359,469
|
| Момент управляющего воздействия, Н·м
|

|
11,144
|
5
Силовой анализ по теореме Жуковского
Для седьмого положения механизма строим повёрнутый на 90º по ходу вращения кривошипа план скоростей, в масштабном коэффициенте скоростей  Согласно теореме подобия точки Согласно теореме подобия точки  и и  делят отрезки ab
и cd
пополам, а делят отрезки ab
и cd
пополам, а  находится от полюса на расстоянии: находится от полюса на расстоянии:
На данный план переносим вектора сил, действующие на звенья, в соответствующие точки в том направлении, в котором они действуют. При этом приложенные к звеньям 2, 3 и 4 моменты пар сил инерции заменяем парами сил:
где  и и  – силы, образующие пару сил; – силы, образующие пару сил;
 – моменты пар сил инерции i-го звена; – моменты пар сил инерции i-го звена;
 – длина i-го звена. – длина i-го звена.
Рассчитаем пары сил, действующие на звенья:
Силы  , ,  , ,  , ,  и и  , ,  приложены в крайних точках своих звеньев. приложены в крайних точках своих звеньев.
По методу Жуковского, сумма моментов вех сил  , включая силы инерции и уравновешивающую силу, относительно полюса плана скоростей p
равна нулю: , включая силы инерции и уравновешивающую силу, относительно полюса плана скоростей p
равна нулю:


Измеряем плечи сил на плане:

 146,562 146,562
 37,480 37,480 
Сделаем расчет уравновешивающей силы:



Момент управляющего воздействия:
Формула для погрешности 
где  – максимальное значение момента управляющего воздействия полученного в результате двух расчетов (кинетостатического и по методу Жуковского). – максимальное значение момента управляющего воздействия полученного в результате двух расчетов (кинетостатического и по методу Жуковского).
– минимальное значение момента управляющего воздействия полученного в результате двух расчетов (кинетостатического и по методу Жуковского).
Вычисляем:


Данная погрешность получилась в результате графического метода расчёта и округления численных значений.
6 Динамический анализ плоского рычажного механизма
6.1 Определение значений фазовых углов рабочего и холостого хода
Определим пределы рабочего хода механизма. Рабочий ход в одну сторону и холостой в обратную соответствует углу поворота или линейному перемещению ведомого звена от одного крайнего положения до другого. Эти ходы равны. Однако с целью увеличения К.П.Д. механизма желательно, чтобы ведомое звено при холостом ходе быстрее возвращалось в положение рабочего хода. Это условие выполняется, если угол поворота ведущего звена, соответствующий холостому ходу, будет меньше, чем соответствующий рабочему. Для определения пределов рабочего хода проанализируем план положений механизма.
В состав механизма входит ползуна, являющийся ведомым (выходным) звеном. Рабочим ходом является фаза, в которой ползун движется в сторону, противоположную направлению силы полезного сопротивления. Таким образом фаза рабочего хода – положения механизма с 0 по 6. Фаза холостого хода – с 6 по 12 положение.
6.2 Определение и 
Построим 12 рычагов Жуковского для определения уравновешивающей силы. Для этого используем 12 планов скоростей соответствующих построенным кинематическим схемам. Перенесем на планы скоростей все внешние силы, действующие на механизм, предварительно повернув их в противоположную сторону вращения кривошипа на  . Поскольку сила полезного сопротивления . Поскольку сила полезного сопротивления  действует только при рабочем ходе, перенесем ее на те планы скоростей, которые соответствуют рабочему ходу, при этом в положениях 0, 6 и 12 ее не учитываем. Уравновешивающую силу перенесем в точку a
всех планов скоростей, силы тяжести - во все точки центров масс соответственно. Силы инерции и моменты пар сил инерции не учитываем. действует только при рабочем ходе, перенесем ее на те планы скоростей, которые соответствуют рабочему ходу, при этом в положениях 0, 6 и 12 ее не учитываем. Уравновешивающую силу перенесем в точку a
всех планов скоростей, силы тяжести - во все точки центров масс соответственно. Силы инерции и моменты пар сил инерции не учитываем.
Представим план скоростей в виде жесткой системы, закрепленной (условно) в полюсе р
. Силы, приложенные к ней, создают вращающие моменты. Чтобы система находилась в равновесии, необходимо уравновесить моменты вращения. Составим уравнение равновесия:
6.3 Построение диаграммы приведенных моментов движущих сил
Для нахождения момента сил необходимо найти приведенную силу  которая по модулю равна уравновешивающей силе, но направлена в противоположную сторону. Силу уравновешивающую найдем из уравнения моментов составленного для каждого положения механизма, относительно полюса (6.1). которая по модулю равна уравновешивающей силе, но направлена в противоположную сторону. Силу уравновешивающую найдем из уравнения моментов составленного для каждого положения механизма, относительно полюса (6.1).
Составим уравнения моментов для седьмого положения механизма:
Из этого равенства найдем величину уравновешивающей силы :

Определяем силу приведения по следующей формуле:
Момент приведенных сил для седьмого положения найдем по формуле:

где - приведенная сила, Н;
 - длина звена OA
, м. - длина звена OA
, м.
Аналогично рассчитываем уравновешивающую силу, силу приведения и момент приведенных сил для остальных положений механизма, и сводим их в одну таблицу 7, предварительно составив таблицу плеч сил для всех положений.
Таблица 6- Плечи сил
| Положения
|

|

|

|

|

|
| 1
|
50
|
19,27
|
3,36
|
16,79
|
6,45
|
| 2
|
39,63
|
6,58
|
42,77
|
32,11
|
| 3
|
48,74
|
7,85
|
58,16
|
52,56
|
| 4
|
45,57
|
7,27
|
57,02
|
54,98
|
| 5
|
32,07
|
5,36
|
43,17
|
42,8
|
| 6
|
12,45
|
2,82
|
22,91
|
23,18
|
| 7
|
29,72
|
3,34
|
27,29
|
27,43
|
| 8
|
48,05
|
7,62
|
61,07
|
60,23
|
| 9
|
57,9
|
6,46
|
52,72
|
49,16
|
| 10
|
42,94
|
8,91
|
57,15
|
41,92
|
| 11
|
10,07
|
2,04
|
9,43
|
2,27
|
| 12,0
|
0,5
|
-
|
-
|
-
|
Таблица 7 – Силы приведения и моменты приведенных сил
| Положения механизма
|
Расчетная величина
|
| 
|
| 0, 12
|
-5,170
|
5,170
|
0,160
|
| 1
|
70,171
|
-70,171
|
-2,175
|
| 2
|
340,599
|
-340,599
|
-10,559
|
| 3
|
554,976
|
-554,976
|
-17,204
|
| 4
|
579,753
|
-579,753
|
-17,972
|
| 5
|
451,419
|
-451,419
|
-13,994
|
| 6
|
6,561
|
-6,561
|
-0,203
|
| 7
|
4,694
|
-4,694
|
-0,146
|
| 8
|
14,439
|
-14,439
|
-0,448
|
| 9
|
8,665
|
-8,665
|
-0,269
|
| 10
|
15,346
|
-15,346
|
-0,476
|
| 11
|
2,366
|
-2,366
|
-0,073
|
Для построения диаграммы приведенных моментов сил рассчитываем масштабные коэффициенты.
Масштабный коэффициент оси угла поворота:

где L
- произвольно выбранное расстояние от 0 до 12 положения механизма на диаграмме, мм.
Масштабный коэффициент оси момента приведенных сил:
Где - максимальный момент приведенных сил (см. таблицу 6),  ; ;
 - расстояние, изображающее максимальный момент приведенных сил на диаграмме, мм. - расстояние, изображающее максимальный момент приведенных сил на диаграмме, мм.
Переведем все приведенные моменты через масштабный коэффициент в линейные значения:


При построении диаграммы по оси ординат  отложим произвольно выбранный отрезок L
. По оси абсцисс отложим произвольно выбранный отрезок L
. По оси абсцисс  откладываем значения приведенных моментов откладываем значения приведенных моментов  в соответствующих положениях. При чем выше оси в соответствующих положениях. При чем выше оси  значение со знаком «-», а ниже со знаком «+». значение со знаком «-», а ниже со знаком «+».
Соединив все точки плавной лекальной кривой, получаем кривую изменения приведенного момента движущих сил.
Приведенный момент сил сопротивления является величиной постоянной, и высчитывается по формуле:

Для построения кривой изменения приведенного момента сил сопротивления переведем полученную величину в масштабный коэффициент:
По полученному значению построим прямую приведенного момента сил сопротивления.
6.4 Построение диаграммы работ движущих сил и сил сопротивления
Для построения диаграммы работ используем диаграмму приведенных моментов. Для этого замеряем величину момента приведенных сил в точках, расположенных по середине между соседними положениями механизма. Данную величину делим на коэффициент уменьшения m
и откладываем на диаграмме работ. Для последующих положений величину отрезка прибавляем к полученной ранее, также уменьшая в m
раз и откладывая на диаграмме. Соединяя все отложенные точки плавной кривой, получаем диаграмму работ движущих сил  . Соединяя начальную и конечную точки прямой линией, получим диаграмму сил сопротивления . Соединяя начальную и конечную точки прямой линией, получим диаграмму сил сопротивления  . .
Рассчитываем масштабный коэффициент работ:

где  - интервал между соседними положениями по оси - интервал между соседними положениями по оси  ; ;
 - коэффициент уменьшения; - коэффициент уменьшения;
 - масштабный коэффициент момента приведенных сил; - масштабный коэффициент момента приведенных сил;
 - масштабный коэффициент угла поворота. - масштабный коэффициент угла поворота.
6.5 Построение диаграммы изменения кинетической энергии
Масштабный коэффициент оси изменения кинетической энергии:

Для определения области нахождения графика по формуле найдем значение:
где  - изменения кинетической энергии, Дж; - изменения кинетической энергии, Дж;
 - работа движущих сил, Дж; - работа движущих сил, Дж;
- работа сил сопротивления, Дж.
Для построения диаграммы изменения кинетической энергии измерим расстояния между линиями работы движущих сил и сил сопротивления и откладываем эти значения выше оси угла поворота кривошипа, т.к. значения движущих сил во всех положениях больше значения сил сопротивлений. Соединим отложенные точки плавной кривой.
6.6 Построение диаграммы приведенных моментов инерции
Приведенный момент инерции механизма будет складываться из постоянной величины и переменной :
Постоянная величин приведенного момента инерции равна:
где - момент инерции энергетической машины, кг м2
; м2
;
 - передаточное отношение преобразующего механизма; - передаточное отношение преобразующего механизма;
 - момент инерции кривошипа (рабочей машины), кгм2
. - момент инерции кривошипа (рабочей машины), кгм2
.
Найдем момент инерции кривошипа:
где  - масса кривошипа, кг; - масса кривошипа, кг;
 - длина кривошипа, м. - длина кривошипа, м.
Для вычисления приведенного момента инерции энергетической машины необходимо подобрать электродвигатель.
В качестве электродвигателя возьмем двигатель серии АИР.
Рассчитаем частоту вращения и мощность двигателя:

Примем передаточное отношение равным 4. Тогда:


По полученным значениям подберем стандартный электродвигатель с ближайшими наибольшими характеристиками.
Возьмем двигатель 71А64 (N=0,55 кВт, n=1350 об/мин). Приведенным момент инерции ротора этого двигателя равен:

Найдем приведенный момент инерции энергетической машины, исключив влияние магнитного поля земли:
По полученным значениям найдем постоянную величину приведенного момента:

Найдем переменную величину приведенного момента инерции:
где - угловая скорость кривошипа, с-1
;
 - сумма энергий шатунов, ползуна и коромысла. - сумма энергий шатунов, ползуна и коромысла.
 - для шатуна 2; - для шатуна 2;
 - для коромысла 3; - для коромысла 3;
 - для шатуна 4; - для шатуна 4;
 - для ползуна 5, - для ползуна 5,
где - скорость центра масс i
-го звена;
 - масса i
-го звена; - масса i
-го звена;
 - угловая скорость i
-го звена; - угловая скорость i
-го звена;
 момент инерции шатуна i
. момент инерции шатуна i
.
Скорости центров масс:




Угловые скорости кривошипа, коромысла и шатунов:

Подставим значения скоростей центров масс и угловых скоростей в формулу переменной величины приведенного момента инерции:

Преобразуем полученное выражение. Для облегчения вычисления переменной части приведенного момента инерции для каждого положения механизма необходимо каждое слагаемое из числителя дроби представить в виде произведения квадрата длины отрезка на коэффициент  : :
где 






Измерим длины необходимых отрезков с планов положений и рассчитаем приведенный момент инерции для каждого положения механизма.
Полученные данные сведем в таблицу 8.
Таблица 8 – Значения приведенных моментов инерции.
| Положение механизма
|
 , ,
мм
|
 , ,
мм
|
 , ,
мм
|
 , ,
мм
|
 , ,
мм
|
 , ,
мм
|
 , ,
мм
|
,

|
,

|
,
|
| 1
|
33,443
|
36,937
|
3,342
|
27,155
|
27,291
|
0,902
|
27,433
|
0,0017
|
0,00184
|
0,0035
|
| 2
|
48,377
|
4,822
|
7,644
|
62,109
|
61,120
|
5,147
|
60,225
|
0,0079
|
0,0096
|
| 3
|
57,909
|
44,121
|
6,053
|
58,528
|
53,321
|
17,605
|
49,163
|
0,0072
|
0,0089
|
| 4
|
43,130
|
73,704
|
10,243
|
83,228
|
60,732
|
51,140
|
41,921
|
0,0115
|
0,0132
|
| 5
|
22,35
|
59,123
|
2,565
|
20,84
|
11,346
|
19,079
|
2,274
|
0,0009
|
0,0026
|
| 6
|
36,284
|
31,824
|
4,149
|
33,547
|
19,472
|
28,492
|
6,445
|
0,0022
|
0,0039
|
| 7
|
47,842
|
9,121
|
7,516
|
61,067
|
45,255
|
36,453
|
32,113
|
0,0066
|
0,0083
|
| 8
|
50,181
|
9,527
|
8,328
|
67,662
|
59,254
|
25,258
|
52,562
|
0,0086
|
0,0103
|
| 9
|
45,842
|
26,251
|
7,388
|
60,027
|
57,274
|
11,460
|
54,982
|
0,0072
|
0,0089
|
| 10
|
37,116
|
40,603
|
5,364
|
43,583
|
43,180
|
2,243
|
42,802
|
0,0040
|
0,0057
|
| 11
|
27,937
|
79,753
|
2,821
|
22,925
|
23,051
|
0,845
|
23,185
|
0,0011
|
0,0028
|
| 0,12
|
25
|
50
|
0
|
0
|
0
|
0
|
0
|
0,0003
|
0,0020
|
Определим масштабный коэффициент приведенного момента инерции по максимальному значению:
где  - максимальный приведенный момент инерции, кг·м2
; - максимальный приведенный момент инерции, кг·м2
;
 - произвольно выбранный отрезок, мм. - произвольно выбранный отрезок, мм.
Переведем все приведенные моменты инерции в данный масштабный коэффициент и построим диаграмму.
Для построения диаграммы по оси абсцисс откладываем  , а по оси ординат , а по оси ординат 

Для построения диаграммы для каждого положения откладываем соответствующие значения и соединяем полученные точки плавной кривой.
6.7 Построение диаграммы энергия-масса
Построение диаграммы происходит следующим образом: по оси  откладываем ординаты откладываем ординаты  из диаграммы изменения кинетической энергии, а по оси - ординаты диаграммы приведенных моментов инерции, соответствующие одному и тому же положению механизма. Номера положений фиксируем на пересечении соответствующих координат диаграммы. В итоге получим замкнутую кривую. из диаграммы изменения кинетической энергии, а по оси - ординаты диаграммы приведенных моментов инерции, соответствующие одному и тому же положению механизма. Номера положений фиксируем на пересечении соответствующих координат диаграммы. В итоге получим замкнутую кривую.
6.8 Определение значения момента инерции маховой массы
По справочной таблице выберем коэффициент неравномерности хода ДВС:

Вычислим максимальный и минимальный угол наклона касательной:



Проведем касательные к диаграмме энергия-масса сверху и снизу под углами  и и  до пересечения с осью до пересечения с осью  . .
Замерим отрезок  , между точками пересечения касательных и осью изменения энергии, и определим приведенный момент инерции маховой массы: , между точками пересечения касательных и осью изменения энергии, и определим приведенный момент инерции маховой массы:

7 Простые зубчатые механизмы
7.1 Структурный анализ простого зубчатого механизма
Структурный анализ простых зубчатых механизмов сводится к определению подвижности механизма.

Таблица 9 - звенья простого зубчатого механизма
| № П.П
|
Номер звена
|
Вид совершаемого движения
|
схема
|
Кинематическое состояние
|
| 1
|
1
|
вращательное
|
|
подвижное
|
| 2
|
2
|
вращательное
|
|
подвижное
|
Подвижность механизма определяем по формуле Чебышева:

где  - подвижность механизма; - подвижность механизма;
 - число подвижных звеньев; - число подвижных звеньев;
 и и  - соответственно число пар пятого и четвертого класса. - соответственно число пар пятого и четвертого класса.
В структуру механизма входят два подвижных звена (Таблица 9) и стойка, представленная двумя шарнирно-неподвижными опорами. Следовательно, =2.
Таблица 10 –кинематические пары простого зубчатого механизма
| Номер звена
|
схема
|
название
|
Класс / подвижность
|
Вид контакта / замыкание
|
| 0-1
|
|
вращательная
|
5/1
|
По поверхности(низшая)/
геометрическое
|
| 1-2
|
|
зубчатая
|
4/2
|
Линия (высшая)/
геометрическое
|
| 0-2
|
|
вращательная
|
5/1
|
По поверхности(низшая)/
геометрическое
|
Из таблицы 10 видно, что кинематические пары 0-1 и 0-2 являются вращательными парами пятого класса, следовательно,  . .
Кинематическая пара 1-2 является парой четвертого класса, следовательно,  . .
Подставим число подвижных звеньев и число пар пятого и четвертого классов в формулу Чебышева:

Полученный результат означает, что для однозначного описания положения всех звеньев механизма в рассматриваемой плоскости достаточно знать одну обобщенную координату.
7.2 Синтез эвольвентного зацепления простого зубчатого механизма
Найдем инвалюту угла зацепления

По таблице значений инвалют найдем угол зацепления:

Найдем минимальную величину коэффициента смещения для шестерни:

Найдем коэффициент смещения для колеса:

Примем значение  . .
Отложим значение смещения  и на осях блокирующего контура. Точка их пересечения должна находится в блокирующем контуре. В данном случае точка находится в контуре, следовательно оставляем полученные значения коэффициентов для дальнейших расчетов. и на осях блокирующего контура. Точка их пересечения должна находится в блокирующем контуре. В данном случае точка находится в контуре, следовательно оставляем полученные значения коэффициентов для дальнейших расчетов.
Найдем геометрические параметры зубчатых колес.
Диаметры делительных окружностей:
для шестерни 
для колеса 
где  - модуль; - модуль;
 - число зубьев на шестерне и колесе соответственно. - число зубьев на шестерне и колесе соответственно.
Диаметры начальных окружностей:
для шестерни 
для колеса 
Шаг по делительной окружности:

Шаг по основной окружности:

Диаметры основных окружностей:
для шестерни 
для колеса 
Диаметры окружностей впадин зубьев:
для шестерни

для колеса

где  - коэффициент ножки зуба. - коэффициент ножки зуба.
Диаметры окружностей вершин зубьев:
для шестерни 
для колеса 
где  - коэффициент головки зуба. - коэффициент головки зуба.
Коэффициент уравнительного смешения:

Коэффициент воспринимаемого смешения:
 . .
Уточненное межосевое расстояние:

Делительное межосевое расстояние:
Толщина зуба по делительной окружности:
для шестерни :

для колеса :

Толщина впадин по делительной окружности:
для шестерни 
для колеса 
Высота зубьев:

Углы профиля на окружности вершин:
для шестерни: 
для колеса: 
Толщина зубьев по окружности вершин:
для шестерни

для колеса

Проверка:
 где где 
Оба значения толщины зубьев по окружности больше значения минимальной толщины, проверка сходится.
Коэффициент торцевого перекрытия:


Для построения зубчатого зацепления определим масштабный коэффициент длин и переведем все геометрические параметры зубчатых колес в данный масштабный коэффициент, при условии, что высота зуба должна быть не менее  на чертеже. на чертеже.
Переведем все значения через  : :

















Для построения зубчатого зацепления отложим межосевое расстояние  . Проведем начальную, делительную, основную окружности, а также окружности вершин и впадин зубьев для каждого зубчатого колеса. Начальные окружности . Проведем начальную, делительную, основную окружности, а также окружности вершин и впадин зубьев для каждого зубчатого колеса. Начальные окружности  и и  должны сопрягаться в полюсе зацепления P
. Откладываем под углом от линии центров должны сопрягаться в полюсе зацепления P
. Откладываем под углом от линии центров  для колеса и для шестерни лучи, пересекающие основные окружности в точках A
и B
. Через точки A
и B
проводим прямую - линию зацепления. Она проходит через полюс зацепления P
. Отрезок от точки сопряжения P
до точки пересечения A
, делим на шесть равных частей для колеса и для шестерни лучи, пересекающие основные окружности в точках A
и B
. Через точки A
и B
проводим прямую - линию зацепления. Она проходит через полюс зацепления P
. Отрезок от точки сопряжения P
до точки пересечения A
, делим на шесть равных частей  . Проецируем полученные точки на основную окружность, проводим через каждую из них касательную к основной окружности, и на касательных откладываем величину отрезка PA
, каждый раз уменьшая на величину . Проецируем полученные точки на основную окружность, проводим через каждую из них касательную к основной окружности, и на касательных откладываем величину отрезка PA
, каждый раз уменьшая на величину  . Полученные точки соединяем плавной кривой и получаем нижнюю половину эвольвентного профиля зуба. Аналогично построим вторую половину профиля зуба, только увеличивая отрезок PA
на величину . Полученные точки соединяем плавной кривой и получаем нижнюю половину эвольвентного профиля зуба. Аналогично построим вторую половину профиля зуба, только увеличивая отрезок PA
на величину  . Откладываем толщину зуба по делительной окружности и ширину зуба по окружности вершин. Симметрично отобразим вторую половину профиля зуба. По делительной окружности откладывая ширину впадины и шаг, строим еще два - три зуба. Аналогично строим профили зубьев шестерни. . Откладываем толщину зуба по делительной окружности и ширину зуба по окружности вершин. Симметрично отобразим вторую половину профиля зуба. По делительной окружности откладывая ширину впадины и шаг, строим еще два - три зуба. Аналогично строим профили зубьев шестерни.
8 Сложный зубчатый механизм
8.1 Структурный анализ
Данный сложный зубчатый механизм состоит из четырех простых зубчатых передач и планетарного механизма.
Далее определим количество подвижных звеньев, а также вид совершаемого ими движения. Сведем эти данные в таблицу:
Таблица 11 - звенья сложного зубчатого механизма
| № п.п
|
Номер звена
|
Вид совершаемого движения
|
Схема
|
Кинематическое состояние
|
| 1
|
1
|
вращательное
|
|
подвижное
|
| 2
|
2-3
|
вращательное
|
|
Подвижное
|
| 3
|
4
|
вращательное
|
|
Подвижное
|
| 4
|
5
|
сложное
|
|
подвижное
|
| 5
|
6
|
-
|

|
неподвижное
|
| 6
|
7-H
|
вращательное
|
|
подвижное
|
| 7
|
8-9
|
вращательное
|
|
подвижное
|
| 8
|
10
|
вращательное
|
|
подвижное
|
Из таблицы видим, что механизм имеет семь подвижных звеньев, совершающих вращательные и сложные движения. Корона 6 является неподвижным звеном и относится к стойке.
Для выявления числа, класса, подвижности, вида контакта и замыкания всех кинематических пар составим таблицу:
Таблица 12 – кинематические пары сложного зубчатого механизма
| Номер звена
|
Схема
|
Название
|
Класс/
подвижность
|
Вид контакта/замыкание
|
| 0-1
|
|
вращательная
|
5/1
|
По поверхности(низша)/геометрическое
|
| 1-2,3
|
|
зубчатая
|
4/2
|
Линия (высшая)/
геометрическое
|
| 0-2,3
|
|
вращательная
|
5/1
|
По поверхности(низша)/геометрическое
|
| 2,3-4
|
|
зубчатая
|
4/2
|
Линия (высшая)/
геометрическое
|
| 0-4
|
|
вращательная
|
5/1
|
По поверхности(низша)/геометрическое
|
| 4-5
|
|
зубчатая
|
4/2
|
Линия (высшая)/
геометрическое
|
| 5-H,7
|
|
вращательная
|
5/1
|
По поверхности(низша)/геометрическое
|
| 5-6
|
|
зубчатая
|
4/2
|
Линия (высшая)/
геометрическое
|
| H,7-0
|
|
вращательная
|
5/1
|
По поверхности(низша)/геометрическое
|
| H,7-8
|
|
зубчатая
|
4/2
|
Линия (высшая)/
геометрическое
|
| 8,9-0
|
|
вращательная
|
5/1
|
По поверхности(низша)/геометрическое
|
| 8,9-10
|
|
зубчатая
|
4/2
|
Линия (высшая)/
геометрическое
|
| 10-0
|
|
вращательная
|
5/1
|
По поверхности(низша)/геометрическое
|
Зубчатый механизм является плоским, следовательно, подвижность определяем по формуле Чебышева:

Анализируя схему, видим, что механизм состоит из стойки 0, представленной шестью шарнирно неподвижными опорами, и семью подвижными звеньями (1; 2-3; 4; 5; H; 7; 8-9; 10).
Колесо 6 является неподвижным звеном и относится к стойке. Таким образом,  . .
Схема содержит семь одноподвижных кинематических пар: 0-1; 0-2,3; 0-4; 5-Н,7; 8,9-0; 10-0; H,7-0. И шесть высших двухподвижных кинематических пар: 1-2,3; 2,3-4; 4-5; 5-6;4,7-8; 8,9-10.
Следовательно,  . .
Подставив найденные значения в Чебышева, получим:

Полученный результат означает, что для однозначного описания положения всех звеньев механизма в рассматриваемой плоскости достаточно знать одну обобщенную координату.
8.2 Синтез сложного зубчатого механизма
Разобьем данный сложный зубчатый механизм на четыре простых зубчатые передачи и, планетарный механизм:

Разложим передаточное число по ступеням (рядам):

Передаточное отношение первого ряда:

тогда 
Из условия отсутствия интерференции:
 следовательно следовательно 
 - не целое число, значит берем - не целое число, значит берем 
тогда 
Передаточное отношение планетарного механизма:

Используя условие соосности, осуществляем преобразование выражения:

Следовательно:

Рассмотрим три варианта числа зубьев для солнечного колеса, и по ранее полученным выражениям расщитаем  и . Полученные данные запишем в таблицу: и . Полученные данные запишем в таблицу:
Таблица 13 – числа зубьев колес
| № варианта
|

|

|
|
| 1
|
20
|
30
|
80
|
| 2
|
40
|
60
|
160
|
| 3
|
56
|
84
|
224
|
В схеме данного планетарного механизма необходимо обеспечить отсутствие подреза зубьев колес с внутренним зацеплением. Для выполнения этого условия необходимо, чтобы число зубьев всех колес было больше или равно двадцати. Из таблицы 13 видим, что это условие выполняется для всех трех вариантов чисел зубьев, следовательно общий сомножитель вариантах.
Для обеспечения отсутствия контакта сателлитов друг с другом необходимо проверить условие соседства:
где  - число сателлитов; - число сателлитов;
Рассмотрим условие соседства для всех вариантов:
Вариант 1:

Следовательно, условие соседства для первого варианта не выполняется.
Вариант 2:

Следовательно, условие соседства для второго варианта выполняется.
Вариант 3:

Следовательно, условие соседства для третьего варианта не выполняется.
Условие соседства выполняется только для 2 варианта, следовательно, при проверке условия сборки будут проверяться только 2 вариант.
Для обеспечения собираемости однорядного планетарного механизма необходимо проверить условие сборки:
где: p
-число полных циклов солнечного колеса (1,2,3…)
 - целое натуральное число. - целое натуральное число.
Проверим условие сборки для 2 варианта.
Вариант 2:
Для второго варианта условие сборки выполняется, поскольку B целое.
В качестве окончательного принимаем вариант 2:
  
Передаточное отношение второй простой зубчатой передачи:

следовательно,
Найдем число зубьев третьей зубчатой передачи:
тогда 
Из условия отсутствия интерференции:
 следовательно следовательно 
 - не целое число, значит берем - не целое число, значит берем
тогда 
Найдем число зубьев четвертой зубчатой передачи:
тогда 
Из условия отсутствия интерференции:
 следовательно следовательно  . .
Определим диаметры зубчатых колес механизма.
Рассчитаем масштабный коэффициент длин для данной схемы:

Переведем все диаметры в масштабный коэффициент:
Построим кинематическую схему механизма в найденном масштабном коэффициенте. Расстояние между колесами берем произвольным, поскольку оно не влияет на передаточную функцию механизма.
8.3 Кинематический анализ
Построим план скоростей для данной схемы сложного зубчатого механизма. По условию имеем число оборотов на первом колесе  . .
Определим угловую скорость на первом колесе:
Найдем линейную скорость первого колеса:

Найдем масштабный коэффициент скоростей:
где  - отрезок, изображающий скорость точки А
на плане скоростей. - отрезок, изображающий скорость точки А
на плане скоростей.
Построим план угловых скоростей методом параллельного переноса годографов с плана скоростей на план угловых скоростей от полюса и до пересечения с осью ω
. Расстояния от нуля до найденных точек и есть значения величин угловых скоростей. Составим пропорцию и вычислим их значения.







Определим передаточное число  , используя следующую формулу: , используя следующую формулу:

Вычислим погрешность:

Полученная погрешность меньше допустимых 5%, следовательно расчет сложного зубчатого механизма выполнен верно.
9 Кулачковый механизм
9.1 Структурный анализ
Так как все звенья данного механизма лежат в одной плоскости, то его подвижность рассчитывается по формуле Чебышева:

Таблица 14- звенья кулачкового механизма
| № п.п
|
Номер звена
|
Вид совершаемого движения
|
Схема
|
Кинематическое состояние
|
| 1
|
1
|
вращательное
|
|
подвижное
|
| 2
|
2
|
поступательное
|
|
подвижное
|
| 3
|
3
|
Сложное-вращательное
|
|
подвижное
|
Механизм состоит из стойки и трех подвижных звеньев: кулачка 1, коромысла 2 и ролика 3. Ролик введен в схему механизма для замены трения скольжения на трение качения, с целью уменьшения интенсивности износа рабочих поверхностей контактирующих звеньев, а также с целью увеличения КПД и ресурса работы механизма. Ролик образует с выходным звеном поступательную кинематическую пару пятого класса. Подвижность этой кинематической пары не изменяет подвижности кулачкового механизма, не влияет на его передаточную функцию, так как является местной подвижностью.
Таблица 15- кинематические пары кулачкового механизма
| №
|
Кинематическая пара (КП), название
|
Схема кинематической пары
|
Класс кинематической пары, подвижность
|
Вид контакта, замыкание
|
| 1
|
0-1
|
|
5/1
|
Поверхность (низшая кинематическая пара), геометрическое
|
| 2
|
0-2
|
|
5/1
|
Поверхность (низшая кинематическая пара), геометрическое
|
| 3
|
2-3
|
|
5/1
|
Поверхность (низшая кинематическая пара), геометрическое
|
| 4
|
1-3
|
|
4/2
|
Линия (высшая)/
геометрическое
|
Звенья 1 и 2 образуют со стойкой низшие кинематические пары 0-1;
0-2; кинематическая пара 2-3 является дефектом структуры с местной подвижностью, равной 1, следовательно  Кинематическая пара 1-3 является высшей, следовательно Кинематическая пара 1-3 является высшей, следовательно  . .

При удалении дефекта структуры, получим:
где - подвижность механизма в результате удаления дефектов;
 - подвижность механизма; - подвижность механизма;
 - местная подвижность. - местная подвижность.
Следовательно, подвижность равна:
9.2 Функция аналога пути
Для построения диаграммы зависимости перемещения от угла поворота кулачка вычислим перемещение:
где  - перемещение, м; - перемещение, м;
 - ход кулачкового механизма, м; - ход кулачкового механизма, м;
 - фазовый угол соответствующей фазы, рад; - фазовый угол соответствующей фазы, рад;
 - текущее значение фазового угла, рад. - текущее значение фазового угла, рад.
Ход механизма с толкателем равен:

Определим масштабный коэффициент оси аналога пути:

где - ход механизма (максимальное перемещение), м;
 - расстояние, изображающее максимальное перемещение на диаграмме, мм. - расстояние, изображающее максимальное перемещение на диаграмме, мм.
Определим масштабный коэффициент угла поворота:

где  - произвольно выбранное расстояние, изображающее один период работы механизма на диаграмме, мм. - произвольно выбранное расстояние, изображающее один период работы механизма на диаграмме, мм.
Переведем все фазовые углы в масштабный коэффициент.
Фаза удаления:
Фаза верхнего выстоя:
 . .
Фаза сближения:
Фаза нижнего выстоя:
Разобьем фазовые углы удаления и сближения на шесть частей и посчитаем перемещения для каждого значения фазового угла.
Для первого положения:

Переведем полученную величину перемещения в масштабный коэффициент:
Для остальных положений расчет ведется аналогично. Результаты сведём в таблицу 15.
Таблица 16– Значения перемещения
| Фаза
удаления
|
0
|

|

|
|

|
|

|
| Фаза сближения
|
0
|

|

|

|
|
|

|
| 
|
0
|
6
|
8,7
|
31
|
36
|
43
|
45
|
|
|
0
|
0,9
|
8,55
|
23
|
36
|
44
|
45
|
Для построения диаграммы отложим переведенные в масштабный коэффициент величины перемещений, с учетом того, что в положениях, соответствующих фазе сближения (7-13), отрезки откладываем в обратном порядке.
9.3 Функция аналога скорости
Для построения диаграммы аналога скорости воспользуемся формулой:
Для первого положения:

Для остальных положений аналогично, их результаты сводим в таблицу 11.
Таблица 17 – Значения скоростей
| Фаза
удаления
|
0
|

|

|
|

|
|

|
| 
|
0
|
40
|
43
|
44
|
43
|
40
|
0
|
| Фаза сближения
|
0
|

|

|

|
|
|
|
| 
|
0
|
7
|
20
|
28
|
21
|
7
|
0
|
Рассчитаем масштабный коэффициент:
Для построения диаграммы переведем все полученные значения в масштабный коэффициент. Отложим их на диаграмме, с учетом того, что график на фазе сближения должен находиться ниже оси угла.
Таблица 18 – Значения скоростей, переведенные в масштабный коэффициент
| Фаза
удаления
|
0
|

|

|
|
|
|
|
| 
|
0
|
35
|
43
|
44
|
44
|
35
|
0
|
| Фаза сближения
|
0
|
|
|
|
|
|
|
|
|
0
|
7
|
20
|
28
|
20
|
7
|
0
|
9.4 Функция аналога ускорения
Для построения диаграммы аналога воспользуемся формулой:
Для первого положения:

Для остальных положений вычисления проводятся аналогично. Результаты сводим в таблицу 13.
Таблица 19 – Значения ускорений
| Фаза
удаления
|
0
|
|
|
|

|
|

|
| 
|
0
|
80
|
160
|
0
|
-160
|
-80
|
0
|
| Фаза сближения
|
0
|
|

|

|
|
|

|
| 
|
0
|
78
|
78
|
1,4
|
-78
|
-89
|
-780
|
Рассчитаем масштабный коэффициент:

Для построения диаграммы переведем все полученные значения ускорений в масштабный коэффициент оси аналога ускорения. Отложим рассчитанные отрезки на диаграмме. В положениях фазы сближения график изображаем симметрично относительно оси угла.
Таблица 20 – Значения ускорений, переведенные в масштабный коэффициент.
| Фаза
удаления
|
0
|

|

|
|

|
|

|
|
|
0
|
0,0012
|
65
|
0
|
-65
|
-0,0012
|
0
|
| Фаза сближения
|
0
|

|
|

|
|
|

|
| 
|
0
|
30
|
31,2
|
0
|
-31,2
|
-30
|
0
|
9.5 Определение радиуса исходного контура. Построение диаграммы угла давления
Для определения радиуса исходного контура построим кривую зависимости аналога скорости  от перемещения S
. от перемещения S
.
От точки О
, соответствующей нижнему начальному положению коромысла, в направлении его движения будем откладывать перемещения. Через получившиеся точки проведем перпендикуляры из точки Е находящейся на расстоянии l
от  . Отрезки, значения которых возьмем в миллиметрах, с диаграммы скорости, и отложим их по этим лучам (для фазы удаления в положительную, для фазы сближения в отрицательную сторону относительно оси S
). Соединим все найденные точки плавной кривой и получим диаграмму для определения радиуса исходного контура кулачка. . Отрезки, значения которых возьмем в миллиметрах, с диаграммы скорости, и отложим их по этим лучам (для фазы удаления в положительную, для фазы сближения в отрицательную сторону относительно оси S
). Соединим все найденные точки плавной кривой и получим диаграмму для определения радиуса исходного контура кулачка.
Длину коромысла l
строим в масштабном коэффициенте длин:
 144,93 мм 144,93 мм
Далее проводим касательные к полученной диаграмме под углом  к оси аналога скорости к оси аналога скорости  . На пересечении этих прямых мы получили точку . Пространство, заключенное между этими прямыми, находящееся ниже точки является областью допустимых значений. . На пересечении этих прямых мы получили точку . Пространство, заключенное между этими прямыми, находящееся ниже точки является областью допустимых значений.
Затем через точку Е проводим прямую под углом  , при пересечении ее с касательными контура кулачка находим точку , при пересечении ее с касательными контура кулачка находим точку  . Соединив ее с точкой . Соединив ее с точкой  , получим исходный радиус , получим исходный радиус  , в данном случае , в данном случае 
К характерным точкам диаграммы для определения радиуса исходного контура кулачка (1…14) проведем из точки  прямые. От характерных точек отложим перпендикуляры и, замеряя углы, откладываем их на диаграмме углов давления в масштабном коэффициенте угла давления: прямые. От характерных точек отложим перпендикуляры и, замеряя углы, откладываем их на диаграмме углов давления в масштабном коэффициенте угла давления:
 . .
Таблица 21 – значения углов давления
| точки
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
| 
|
25,18
|
-0,17
|
-4,28
|
0,25
|
12
|
18,54
|
33,29
|
33,29
|
33,16
|
31,22
|
40,35
|
37,12
|
33,11
|
25,18
|
9.6 Синтез профиля кулачка
Для построения теоретической окружности возьмем точку и начнем проводить из нее окружности радиусами, которых будут являтся расстояния до характерных точек.
Каждый из углов поделим на шесть равных дуг и из центра окружности проведем лучи. Радиусами от точки О до 1, 2, 3и так далее по очереди будем проводить дуги до пересечения с лучом, тем самым получим профиль кулачка. Так получим теоретический профиль кулачка.
Радиус ролика найдем из выражения:
где - начальный радиус, мм.
Радиус ролика должен быть целым числом, укладывающимся в значения стандартного ряда натуральных чисел в следующем диапазоне:
Выберем стандартное целое значение из полученного ряда. Возьмем:
Для нахождения рабочего профиля кулачка проведем из каждой точки на теоретическом профиле окружности радиуса ролика. Соединив крайние точки этих окружностей плавной кривой получим рабочий профиль кулачка.
Список используемой литературы
1. Артоболевский, И.И. Теория механизмов и машин / И.И. Артоболевский. – М.: Наука., 1988. – 640с.
2. Фролова К. В. Теория машин и механизмов / К. В, Фролова, - М.: Высшая школа., 1987. – 465с.
3. Конспект лекций по дисциплине « Теория машин и механизмов».
4. Дунаев П.Ф. Конструирование узлов и деталей машин / П.Ф, Дунаев, -М.: Академия, 2004.-496 с.
|