1. Трехфазные выпрямители
Схемы выпрямителей трехфазного питания применяются в основном для питания потребителей средней и большой мощности. Первичная обмотка трансформаторов таких выпрямителей состоит из трех фаз и соединяется либо в звезду, либо в треугольник. Вторичные обмотки трансформатора (их может быть несколько) также трехфазные. С помощью специальных схем соединения вторичных обмоток и всего выпрямителя можно получить выпрямление напряжение с числом пульсаций за период  , кратным трем. С увеличением числа пульсаций в выпрямленном напряжении значительно сокращаются габаритные размеры сглаживающих электрических фильтров либо вообще отпадает необходимость в них. , кратным трем. С увеличением числа пульсаций в выпрямленном напряжении значительно сокращаются габаритные размеры сглаживающих электрических фильтров либо вообще отпадает необходимость в них.
Выпрямители трехфазного питания равномерно нагружают сеть трехфазного тока и отличаются высоким коэффициентом использования трансформатора.
Схемы выпрямителей трехфазного питания используются для питания статических нагрузок активного и активно-индуктивного характера, статических нагрузок с противо-э.д.с., а также динамических нагрузок в виде электродвигателей постоянного тока. Последний вид нагрузки следует рассматривать как противо-э.д.с. с индуктивностью.
2. Схема с нулевым выводом (схема Миткевича)
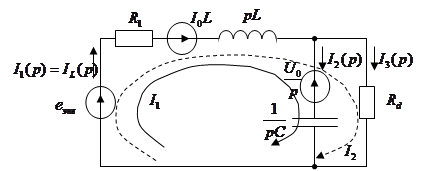
Составным элементом сложных схем выпрямителей трехфазного питания является простая трехфазная схема с нулевым выводом, предложенная Миткевичем (рис. 1). Работа схемы описывается далее.
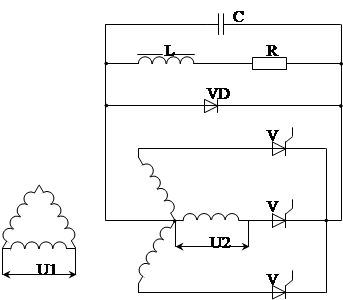
Рис. 1.
3. Основные особенности импульсного метода регулирования
Регулирование напряжения потребителя посредством импульсных преобразователей (ИП) называют импульсным регулированием.
С помощью импульсного преобразователя источник постоянного или переменного напряжения периодически подключается к нагрузке.
Преобразователи, позволяющие осуществлять широтно-импульсное регулирование напряжения на нагрузке, называют широтно-импульсными преобразователями (ШИП).
ШИП находят широкое применение для регулирования и стабилизации напряжения различных потребителей (электротранспорт, электропривод металлообрабатывающих станков, в бортовых системах и т.д.), что объясняется рядом их преимуществ:
· высокий к.п.д., так как потери мощности на регулирующем элементе преобразователя незначительны по сравнению с потерями мощности в случае непрерывного регулирования;
Реклама

· малая чувствительность к изменениям температуры окружающей среды, поскольку регулирующим фактором является время проводимости ключа, а не величина внутреннего сопротивления регулирующего элемента, что имеет место при непрерывном регулировании;
· малые габариты и масса;
· постоянная готовность к работе.
Вместе с тем широтно-импульсным преобразователям присущи и недостатки:
· импульсный режим работы регулирующего элемента приводит к необходимости устанавливать выходные фильтры, что вызывает инерционность процесса регулирования в замкнутых системах;
· высокие скорости включения и выключения тока в силовой цепи ШИП приводит к возникновению радиопомех.
Несмотря на указанные недостатки, применение импульсных преобразователей перспективно в тех случаях, когда на первое место выдвигаются требования высокой экономичности, надежности, малых габаритов, малой чувствительности к колебаниям температуры, высокой гибкости и точности регулирования.
Выходные каскады ШИП наиболее просто выполнять на полностью управляемых вентилях — транзисторах и двухоперационных тиристорах, отпирание и запирание которых производится по базовым цепям.
4. Описание работы схемы
Электрические параметры определяются в общем виде для многофазного выпрямителя с числом пульсаций выпрямленного напряжения за период  , для схемы Миткевича , для схемы Миткевича  . .
При активно-индуктивной нагрузке ( ; ;  ; ;  ) схема может работать в двух режимах. Прерывистость тока в цепи нагрузки зависит не только от диапазона изменения угла регулирования ) схема может работать в двух режимах. Прерывистость тока в цепи нагрузки зависит не только от диапазона изменения угла регулирования  , но и от соотношения параметров нагрузки , но и от соотношения параметров нагрузки  и и  . Так же, как и в однофазных схемах, кривая выпрямленного напряжения может иметь отрицательные значения, что объясняется возможностью вентиля пропускать ток при отрицательном напряжении на обмотке данной фазы за счет накопленной энергии в магнитном поле дросселя . При . Так же, как и в однофазных схемах, кривая выпрямленного напряжения может иметь отрицательные значения, что объясняется возможностью вентиля пропускать ток при отрицательном напряжении на обмотке данной фазы за счет накопленной энергии в магнитном поле дросселя . При  непрерывный режим тока имеет место при любых соотношениях и и ничем не отличается от случая активной нагрузки при . При дальнейшем увеличении угла управления непрерывный режим тока сохраняется только при значительном преобладании индуктивности непрерывный режим тока имеет место при любых соотношениях и и ничем не отличается от случая активной нагрузки при . При дальнейшем увеличении угла управления непрерывный режим тока сохраняется только при значительном преобладании индуктивности  . Для . Для  без больших погрешностей можно считать ток нагрузки идеально сглаженным (рис. 2). без больших погрешностей можно считать ток нагрузки идеально сглаженным (рис. 2).
При учете индуктивностей рассеяния обмоток трансформатора  так же, как и в однофазном выпрямителе, имеются интервалы, соответствующие работе одного и двух вентилей. так же, как и в однофазном выпрямителе, имеются интервалы, соответствующие работе одного и двух вентилей.
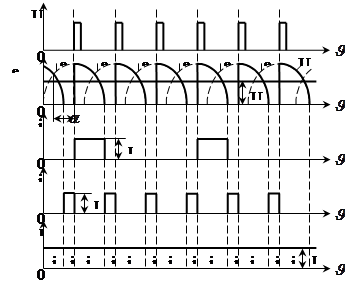
Рис. 2.
Рассмотрим режим, соответствующий двум интервалам периода — интервалу одиночной работы вентиля, когда ток в вентиле равен току нагрузки   , и интервалу одновременной работы двух смежных по фазе вентилей, называемому интервалом коммутации. В течении интервала коммутации ток в одном вентиле уменьшается от значения до нуля, в другом увеличивается от нуля до значения . , и интервалу одновременной работы двух смежных по фазе вентилей, называемому интервалом коммутации. В течении интервала коммутации ток в одном вентиле уменьшается от значения до нуля, в другом увеличивается от нуля до значения .
Реклама

В период коммутации анализ схемы удобно производить методом наложения действий источников синусоидальных э.д.с. вторичных обмоток трансформатора и источника постоянного тока , действующего за счет энергии, накопленной в магнитном поле сглаживающего дросселя к началу коммутации.
Временные диаграммы токов и напряжений в трехфазном управляемом выпрямителе с нулевым выводом при активно-индуктивной нагрузке (;  ; ;  ) приведены на рис. 2. ) приведены на рис. 2.
5. По структурной схеме
На входе схемы стоит трансформатор для понижения сетевого напряжения. Напряжение с трансформатора подается на управляемые вентили, где выпрямляется и фильтруется фильтром, а затем выпрямленное поступает к нагрузке. Стабилизация происходит за счет регулирования угла отпирания вентилей. Сигналы для отпирания тиристоров приходят с системы управления (СУ), для нашего случая можно использовать оптотиристоры или трансформатор для гальванической развязки СУ и силовой части. Система синхронизации согласована с частотой сети.
6. Расчет силовой части
Расчет основных соотношений:
Определяем  , ,  , ,  , ,  , ,  : :
 В; В;
 В; В;
 В; В;
 В; В;
 В. В.
Определяем коэффициенты изменения питающего напряжения:
 ; ;
 . .
Зададимся падением напряжения на элементах схемы:
· на активном сопротивлении трансформатора:  ; ;
· на вентилях:  В; В;
· на активном сопротивлении дросселя:  . .
Определим максимальное и минимальное требуемое выпрямленное напряжение  , ,  , учитывая нестабильность и диапазон регулирования выходного напряжения, а также потери в элементах схемы: , учитывая нестабильность и диапазон регулирования выходного напряжения, а также потери в элементах схемы:
 В, В,
 В, В,
 В. В.
Уравнение нагрузочной характеристики имеет вид:
 . .
При минимальном напряжении сети и максимальном напряжении на нагрузке будет справедливо:
 , ,  . .
Зададимся минимальным углом управления  . Исходя из этого определим необходимое минимальное напряжение . Исходя из этого определим необходимое минимальное напряжение  на фазной обмотке: на фазной обмотке:
 В. В.
Определим номинальное и максимальное значения напряжений на фазной обмотке:
 В; В;
 В. В.
Зная максимальное напряжение на фазной обмотке, определим максимальный угол управления:
 . .
Определим номинальный угол управления:
 . .
Из полученных значений для углов регулирования следует, что возможна робота нулевого диода.
Определим максимальные и минимальные токи нагрузки:
 А; А;
 А. А.
Расчет основных параметров вентилей:
Максимальный ток через вентили:
 А. А.
Максимальный ток через нулевой диод:
 А. А.
Максимальное обратное напряжение на тиристорах

Максимальное обратное напряжение на нулевом диоде:
 В. В.
Выбираем следующие элементы с [2]:
Диод: 50WQ06FN с параметрами: максимальный средний ток  А; максимальный импульсный ток А; максимальный импульсный ток  А при 5мкс и А при 5мкс и  А при 10мс; максимальное обратное напряжение А при 10мс; максимальное обратное напряжение  В; максимальное падение напряжения в открытом состоянии В; максимальное падение напряжения в открытом состоянии  В; диапазон рабочей температуры В; диапазон рабочей температуры  С. С.
Тиристоры: 10R1A10 с параметрами: максимальный средний ток  А; максимальный ток для переменного напряжения частотой 50Гц — А; максимальный ток для переменного напряжения частотой 50Гц —  , 60Гц — , 60Гц — ; ток управления ; ток управления  мА; максимальный ток управления мА; максимальный ток управления  А; максимальное обратное напряжение А; максимальное обратное напряжение  В; максимальное падение напряжения в открытом состоянии В; максимальное падение напряжения в открытом состоянии  В; диапазон рабочей температуры В; диапазон рабочей температуры  С. С.
По вольт-амперным характеристикам элементов определяем сопротивления элементов в открытых состояниях:
 Ом — сопротивление тиристора; Ом — сопротивление тиристора;
 Ом — сопротивление диода. Ом — сопротивление диода.
Расчет трансформатора:
Определим коэффициент трансформации  : :
 . .
Определяем габаритную мощность трансформатора:
 ВА. ВА.
Определяем активное сопротивление трансформатора  и индуктивность рассеяния и индуктивность рассеяния  обмоток трансформатора: обмоток трансформатора:
 ; ;
 . .
где  — плотность тока в обмотках трансформатора, А/мм2
; — плотность тока в обмотках трансформатора, А/мм2
;
 — амплитуда магнитной индукции, Т. — амплитуда магнитной индукции, Т.
Определяем , из [3]:  А/мм2
, А/мм2
,  Т. Т.
Определяем , :
 Ом; Ом;
 Гн. Гн.
Определим  : :
 Ом. Ом.
Определим :
 Ом. Ом.
Как видим сопротивление трансформатора меньше принятого нами.
Максимальное значение токов первичной и вторичной обмоток трансформатора:
 А; А;
 А. А.
Расчет фильтра:
Определим необходимый коэффициент сглаживания индуктивно-емкостного фильтра по формуле
 . .
Для нашего случая  , тогда получим: , тогда получим:
 . .
При коэффициенте сглаживания  рекомендуется применять однозвенный фильтр, при рекомендуется применять однозвенный фильтр, при  — двухзвенный, а трехзвенный — при — двухзвенный, а трехзвенный — при  . Поскольку полученный нами коэффициент . Поскольку полученный нами коэффициент  лежит в пределах от 22 до 220 то, в соответствии с рекомендациями, применим двухзвенный фильтр. лежит в пределах от 22 до 220 то, в соответствии с рекомендациями, применим двухзвенный фильтр.
Поскольку у нас то достаточно фильтр с одного звена.
Коэффициент сглаживания индуктивно-емкостного фильтра можно определить как:
 . .
Определим произведение  : :
 . .
Подставим числовые значения:
 ФГн. ФГн.
Индуктивность дросселя определим из условия непрерывности тока в нем:
 . .
Подставим числовые значения:
 мГн. мГн.
Выбираем дроссель с [4]:
Дроссель типа IHV с параметрами: индуктивность дросселя – 500мкГн, разброс номинала  ; максимальный ток через дроссель – 15А; сопротивление дросселя 0.05Ом. ; максимальный ток через дроссель – 15А; сопротивление дросселя 0.05Ом.
Падение напряжения на дросселе:
 В. В.
Как видим это значение близко к принятому.
Емкость конденсатора фильтра:
 Ф. Ф.
Выбираем конденсатор с [4]:
Конденсатор типа 021ASM с параметрами: емкость конденсатора — 470мкФ, разброс номинала  ; допустимое напряжение 63В. ; допустимое напряжение 63В.
7. Расчет переходного процесса
Поскольку происходит коммутация тиристоров, то для расчета переходного процесса, заменяем нашу схему двумя эквивалентными, которые соответствуют двум интервалам работы схемы:  и и  . .
Элементы: трансформатор, тиристоры и диод заменяем моделями.
Эквивалентные схемы для двух периодов имеют вид:
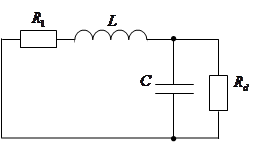
1)  - период - период  : :
Где:  — сопротивление тиристора; — сопротивление тиристора;  — сопротивление дросселя. — сопротивление дросселя.
Представим сумму сопротивлений и сопротивлением  . .
Схема примет вид:
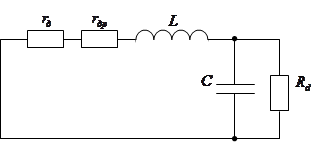
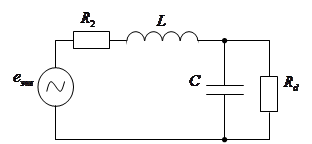
2) 
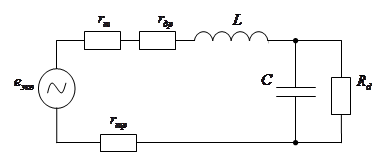
Где:  — сопротивление тиристора; — сопротивление трансформатора; — сопротивление дросселя. — сопротивление тиристора; — сопротивление трансформатора; — сопротивление дросселя.
Представим сумму сопротивлений , и сопротивлением  . .
Схема примет вид:
8. Определение функции описывающие переходной процесс
Определим функции описывающие переходной процесс для двух периодов.
Используем операторный метод.
Определим значение :
 Ом. Ом.
Определим значение :
 Ом. Ом.
Для закона ома в операторной форме справедлива запись:
Но эта запись закона Ома справедлива для расчета переходного процесса в цепи при нулевых начальных условиях. Если же начальные условия не нулевые, форма записи закона Ома в операторной форме будет иметь вид:
где  — начальные условия токов в индуктивностях и напряжений на емкостях. — начальные условия токов в индуктивностях и напряжений на емкостях.
Составим схемы замещения и запишем уравнения описывающие переходной процесс с учетом начальных условиях (при нулевых начальных условиях  ). ).
Для периода :
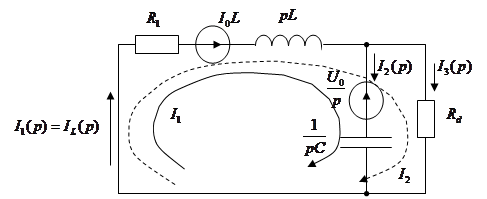
Используя метод контурных токов, составим систему уравнений:
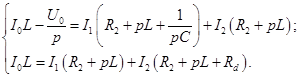 (1) (1)
Представим это в виде:
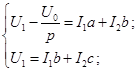 (2) (2)
где 

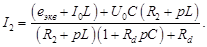
9. Нахождение выражения для тока 
Определим через  : :

Подставляем полученное выражение в первое уравнение системы (2):
Получаем выражение через  , ,  , ,  и и  : :
 (3) (3)
Поскольку  и и  , то: , то:


Подставляя найденные выражения в (3), получим выражение тока :
 (4) (4)
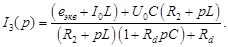
Нахождение выражения для тока
Определим через :

Подставляем полученное выражение в первое уравнение системы (2):

Получаем выражение  через через  , , , ,  и и  : :
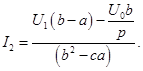 (5) (5)
Поскольку  и и  , то: , то:

Подставляя найденные выражения в (5), получим выражение тока :
  (6) (6)
Определяем значения токов в ветвях




Определим напряжение на емкости

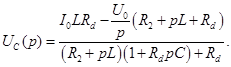
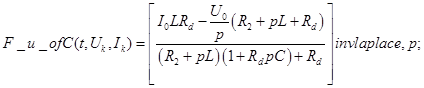
10. Обратные изображения для Лапласа
Обратные изображения Лапласа для  и и  находим в MathCad как функции от находим в MathCad как функции от  , ,  : :

Для периода  : :
 в операторной форме можно представить как в операторной форме можно представить как 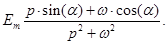
 (1) (1)
Представим это в виде:
 (2) (2)
где 

Нахождение выражения для тока 
Определим через :
Подставляем полученное выражение в первое уравнение системы (2):
Получаем выражение через , , и :
 (3) (3)
Поскольку и , то:

Подставляя найденные выражения в (3), получим выражение тока :

 (4) (4)
Нахождение выражения для тока
Определим через :

Подставляем полученное выражение в первое уравнение системы (2):

Получаем выражение через , , и :
(5)
Поскольку и , то:
Подставляя найденные выражения в (5), получим выражение тока :
  (6) (6)
Определяем значения токов в ветвях

 

Определим напряжение на емкости
11. Обратные изображения для Лапласа
Обратные изображения Лапласа для и находим в MathCad как функции от , :


Построим графики этих функция для при нулевых начальных условиях 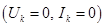 для нагрузки для нагрузки  Ом и угла управления Ом и угла управления  (диод не работает): (диод не работает):
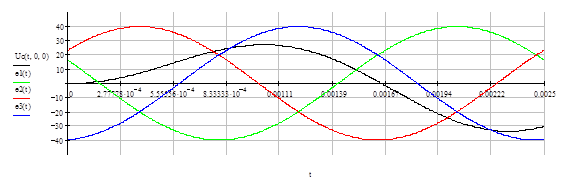
Определяя значения функций в точке  и подставляя в те же формулы, методом накладывания строим график переходного процесса: и подставляя в те же формулы, методом накладывания строим график переходного процесса:
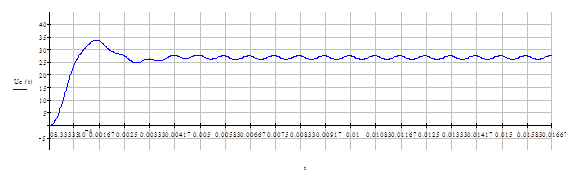
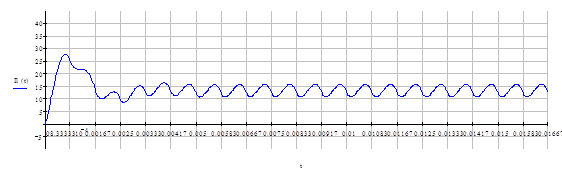
При нагрузке  Ом получаем графики: Ом получаем графики:
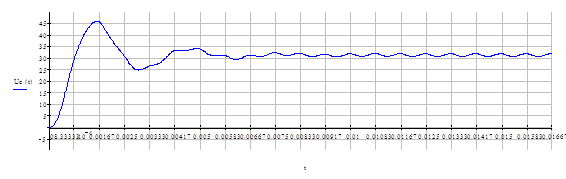
Составим таблицу (табл.. №1) значений токов (ток в дросселе) и напряжений (напряжение в конденсаторе) для двух нагрузок: минимальной Ом и максимальной Ом, при минимальном угле регулирования (диод не работает). Токи и напряжения определяем в точках  (каждые пол такта), где (каждые пол такта), где  : :
Таблица №1
 |
|
|
 |
 |
|
|
| 0 |
0 |
0 |
0 |
0 |
| 1 |
8.725 |
22.345 |
9.724 |
22.147 |
| 2 |
24.424 |
24.395 |
30.251 |
21.956 |
| 3 |
31.583 |
21.63 |
42.365 |
13.837 |
| 4 |
33.48 |
12.806 |
45.395 |
-0.898 |
| 5 |
29.247 |
11.795 |
37.472 |
-5.012. |
| 6 |
27.364 |
9.396 |
30.518 |
-6.194 |
| 7 |
24.937 |
13.226 |
24.872 |
1.462 |
| 8 |
26.335 |
12.182 |
26.722 |
4.046 |
| 9 |
25.972 |
15.025 |
28.928 |
8.145 |
| 10 |
27.705 |
12.506 |
33.444 |
4.555 |
| 11 |
26.707 |
14.501 |
33.44 |
4.402 |
| 12 |
27.733 |
11.901 |
33.909 |
0.27 |
| 13 |
26.402 |
14.206 |
31.041 |
2.267 |
| 14 |
27.457 |
11.915 |
31.075 |
0.758 |
| 15 |
26.294 |
14.35 |
29.58 |
4.151 |
| 16 |
27.484 |
12.035 |
31.345 |
2.437 |
| 17 |
26.369 |
14.391 |
30.801 |
4.72 |
| 18 |
27.536 |
12.017 |
32.464 |
1.964 |
| 19 |
26.381 |
14.357 |
31.203 |
3.855 |
| 20 |
27.523 |
11.995 |
32.171 |
1.352 |
| 21 |
26.364 |
14.353 |
30.636 |
3.762 |
| 22 |
27.514 |
12.001 |
31.76 |
1.645 |
| 23 |
26.364 |
14.36 |
30.564 |
4.132 |
| 24 |
27.518 |
12.005 |
31.947 |
1.849 |
| 25 |
26.368 |
14.36 |
30.808 |
4.11 |
| 26 |
27.519 |
12.003 |
32.085 |
1.695 |
| 27 |
26.367 |
14.359 |
30.798 |
3.962 |
| 28 |
27.518 |
12.002 |
31.986 |
1.637 |
| 29 |
26.367 |
14.359 |
30.699 |
3.995 |
| 30 |
27.518 |
12.003 |
31.945 |
1.709 |
| 31 |
26.367 |
14.359 |
30.757 |
4.028 |
| 32 |
27.519 |
12.003 |
32.002 |
1.69 |
| 33 |
26.367 |
14.359 |
30.742 |
4.009 |
| 34 |
27.519 |
12.003 |
31.981 |
1.69 |
| 35 |
26.367 |
14.359 |
30.729 |
4.021 |
| 36 |
27.519 |
12.003 |
31.98 |
1.703 |
| 37 |
26.367 |
14.359 |
30.737 |
4.027 |
| 38 |
27.519 |
12.003 |
31.989 |
1.701 |
| 39 |
26.367 |
14.359 |
30.741 |
4.021 |
| 40 |
27.519 |
12.003 |
31.98 |
1.701 |
| 41 |
26.367 |
14.359 |
30.733 |
4.021 |
| 42 |
27.519 |
12.003 |
31.98 |
1.701 |
| 43 |
26.367 |
14.359 |
30.733 |
4.021 |
| 44 |
27.519 |
12.003 |
31.98 |
1.701 |
| 45 |
26.367 |
14.359 |
30.733 |
4.021 |
| 46 |
27.519 |
12.003 |
31.98 |
1.701 |
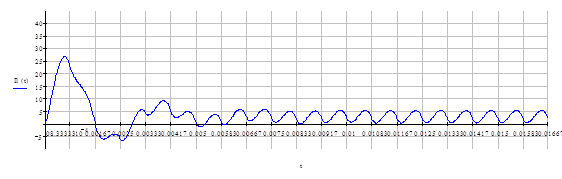
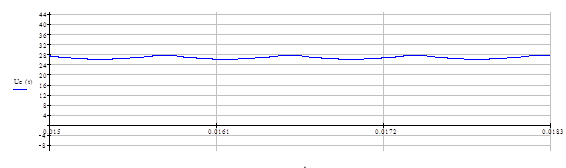
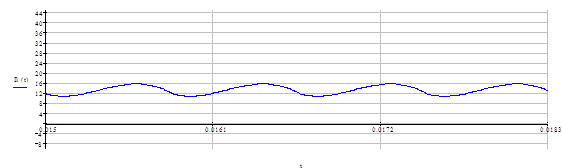
Как видим, процесс стал полностью периодичен при минимальной нагрузке с 16 такта  , то есть получаем установившийся режим за 0.0133с; при максимально нагрузке с 21 такта , то есть получаем установившийся режим за 0.0133с; при максимально нагрузке с 21 такта  , то есть получаем установившийся режим за 0.0175с. , то есть получаем установившийся режим за 0.0175с.
Отсюда следует вывод, что установившийся режим мы получаем за время близкое к 0.02с.
Рассмотрим установившийся режим при минимальной нагрузке (до того как задействуем ОС) в более меньшем временном масштабе:
Список использованной литературы
1. Руденко В.С., Сенько В.И., Чиженко И.М. — 2-е изд., пере раб. и доп. — Вища школа. Головное изд-во, 1983. — 431с.
2. Электронный справочник InternationalRectifier.
3. В.Е. Китаев, А.А. Бокуеяев. — Расчет источников электропитания устройств связи. — М.: Связь, 1979. —216с.
4. Интернет страничка: www.vishay.com.
5. Ромашко В.Я. — Основи аналізу дискретно-лінійних ланцюгів: Навч. Посібник. — К.: Либідь, 1993. — 120с.
|
