Аннотация
В данном курсовом проекте производится анализ механизма насоса.
В курсовом проекте представлены следующие разделы: структурный и кинематический анализы, силовой и динамический анализы механизма насоса, кинематический анализ кулачкового механизма и кинематический анализ сложного зубчатого механизма.
Курсовой проект состоит из пояснительной записки и графической части. В пояснительной записке были детально описаны методы построения планов скоростей, ускорений, диаграмм для всех разделов.
В состав графической части входят 5 чертежей:
1. Кинематический анализ механизма насоса (формат А1);
2. Кинематический анализ кулачкового механизма
(формат А2);
3. Кинематический анализ сложного зубчатого механизма, (формат А2):
4. Силовой анализ механизма насоса (формат А1):
5. Динамический анализ механизма. Подбор маховика. (формат А1).
Пояснительная записка и чертежи были выполнены согласно всех ГОСТов.
Содержание
Введение
1. Структурный и кинематический анализ главного механизма
1.1 Структурный анализ механизма
1.2 Кинематический анализ графоаналитическим методом (методом планов)
1.2.1 Построение плана положений механизма
1.2.2 Построение планов скоростей
1.2.3 Построение планов ускорении
1.3 Кинематический анализ методом построения диаграмм
1.4 Сравнение результатов кинематического исследования, выполненного графическим и графоаналитическим методами.
2. Синтез кулачкового механизма
2.1 Исходные данные
2.2 Построение кинематических диаграмм
2.3 Определение угла давления
3. Кинематический анализ сложного зубчатого механизма
3.1 Аналитический метод
3.2 Графический метод анализа
4. Силовой анализ главного механизма
4.1 Определение внешних сил и сил инерции
4.1.1 Определяем массу звеньев и их вес
4.1.2 Определяем силы и моменты инерции
4.1.3 Определяем результирующие силы
4.2 Силовой анализ без учета сил трения
4.2.1 Силовой анализ группы Ассура звеньев 2 и 3
4.2.2 Силовой анализ начального механизма
4.3 Проверка по теореме Жуковского
4.4 Силовой анализ механизма с учетом сил трения
5. Динамический анализ механизма
5.1 Основные задачи динамического анализа
5.2 Определяем приведенные моменты сил сопротивления
5.3 Определение работы сил сопротивления и работы движущих сил
Реклама

5.4 Решение уравнения движения машинного агрегата
5.5 Определение приведенного момента инерции
5.6 Определение момента инерции маховика по методу Витенбауэра
5.7 Определение геометрических размеров маховика
5.8 Определение угловой скорости после установки маховика
Список использованной литературы
Введение
Теория механизмов и машин (ТММ) есть одной из основных машиностроительных дисциплин. Она посвящена изучению основных методов изучения механизмов и машин и проектированию их схем.
К основным вопросам, которые изучает ТММ, относятся:
- изучение строения (структуры) механизмов;
- определение положений механизмов и траекторий, описуемых отдельными точками;
- определение скоростей и ускорений отдельных точек;
- анализ и проектирование разных механизмов (зубчатых, кулачкових);
- определение разных сил (внешних, реакций, трения, инерции), действующих на механизм;
- изучение энергетического баланса машин (к.п.д.);
- изучение действительного закона движения машин под действием заданных сил;
- изучение способов регулирования скорости хода машины;
- изучение способов уравновешивания сил инерции в машинах и т. д.
Относительно этих вопросов теория механизмов и машин это наука, которая изучает строение, кинематику и динамику механизмов и машин.
Механизмы, которые входят в состав машины, разные. По функциональному назначению механизмы машины делятся на следующие виды:
а) механизмы двигателей и преобразователей:
механизмы двигателей выполняют преобразование разных видов энергии в механическую работу; механизмы преобразователей выполняют преобразование механической работи в другие виды работы;
б) передаточные механизмы, которые выполняют передачу движения от двигателя к технологической машины или рабочего органа;
в) рабочие механизмы, которые непосредственно влияют на обрабатываемую среду или объект;
г) механизмы управления, контроля и регулирования, выполняя управление технологическим процессом, контроль и т.п.;
д) механизмы автоматического счета, взвешивания и упаковывания, установлены в машинах, которые выпускают массовую штучную продукцию.
Академик И.И.Артоболевский, класифицируя механизмы разного назначения, разделил их по структурним признакам на следующие виды: весы, зубчатые, червячные, фрикционные, кулачковые, винт-гайка и др., отдельно комбенированные.
Механизмы бывають плоские и пространственные. В основном применяют плоские механизмы, все точки которых двигаются в одной или нескольких параллельных плоскостях.
Реклама

Зубчатые механизмы используются для изменения параметров вращательного движения, а также для преобразования вращательного движения в прямолинейное.
Червячные передачи применяют при необходимости передачи движения между валами, которые пересекаются.
Фрикционные механизмы используются в основном для тех же целей, что и зубчатые, но они отличаются тем, что движение передается в них силами сцепления (трения) рабочих поверхностей, притиснутых друг к другу.
Кулачковые механизмы предназначены для преобразования движения кулачка в заданоое движение толкателя. В общем случае как кулачек, так и толкатель могут выполнять прямолинейные, вращательные или сложное движение.
Механмзмы винт-гайка преобразовывают вращательное движение в прямолинейное и наоборот.
Комбинированые механизмы, которые включают в разные соединения механизмов, рассмотренные выше, имеют широкую возможность для выполнения разных видов движения.
1. Структурный и кинематический анализ главного механизма
Исходными данными служат:
1.Угловая скорость кривошипа ω,с-1
14
2.Погонная единица массы q, кг/м 12
3.Коэффициент В (F - В* S), Н/м 7000
4.Коэффициент с (m3
=c*m2
) 3,5
5.Длина кривошипа О А, мм 90
6.Длина шатунов АВ, мм 520
7.Неравномерность хода δ 1/8
8.Эксцентриситет е, мм 26
1.1 Структурный анализ механизма
Определяю степень подвижности механизма, состоящего из трех звеньев.
W = 3·(n - 1) - 2·p5
- p4
где: n – количество звеньев; p5
– количество низших пар; p4
- количество высших пар.
N = 4; p5
= 4; p4
= 0
W = 3·(4 - 1) - 2·4- 0 = 1
Степень подвижности механизма W = 1
Механизм состоит из 4 звеньев:
1 -кривошип О А;
2 -шатун АВ;
3 - ползун В;
4-стойка.
Звенья 1-3 -подвижные, 4- неподвижное звено.
На рис.1 изображена структурная схема механизма с разбиением на группы Ассура и начальный механизм.
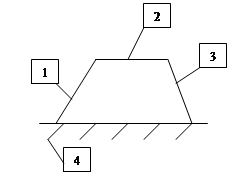
Рис.1. Структурная схема механизма.
Структурная схема наглядно показывает, что механизм состоит из начального механизма 1 класса (стойка 4 и кривошип 1) и одной группы Ассура (шатун 2 и ползун 3).
Структурная формула механизма: I (4-1) → II(2-3)
Механизм относится к механизмам II класса по классификации И.И. Артоболевского.
1.2 Кинематический анализ графоаналитическим методом (методом планов)
1.2.1 Построение плана положений механизма
На листе формата А. 1 изображаем в масштабе μs
=0,0025 м/ммплан положений механизма. План строим в такой последовательности. Выбираем произвольно точку О и из нее описываем окружность радиуса ОА. Вертикально вниз от точки О откладываем величину е и проводим горизонтальную линию. Это будет линия движения ползуна В. Найдем начальное положение точки В (Во):
ОВ0
=АВ-АО=520-90=430 мм
ЕВ0
= 
Соединим точку В0
с точкой О и продлим до пересечения с окружностью, получаем точку Ао
. От точки Ао
в направлении вращения кривошипа ОА разбиваем окружность на 12 равных частей, через каждые 30 градусов, проставляя при этом последовательно точки Ао, А1
А2
и т.д. Соединив полученные точки с центром окружности О, получим 12 положений кривошипа ОА. Точка В принадлежит шатуну АВ и ползуну В и движется поступательно по направляющей, поэтому для построения плана положений звена АВ из каждой точки А раствором циркуля, равным длине шатуна АВ в принятом масштабе, делаем засечки на направляющей, получая точки Во, В1
В2
и т.д., которые последовательно соединяем с точками Ао, A1
и проч.
1.2.2 Построение планов скоростей
Планы скоростей строятся по векторным уравнениям, которые составляются отдельно для каждой группы Ассура в порядке присоединения их к ведущему звену. Для ведущего звена ОА определяем величину скорости точки А:
VA
= ω1
·LОА
VA
= 14 ∙ 0,09= 1,26 м/с
μV
=VA
/[PA
]= 1,26/45=0,028м/с/мм
Вектор VA
перпендикулярен радиусу, т.е. отрезку ОА, и направлен в сторону, определяемую направлением ω1.
Из произвольной точки Р, называемой полюсом плана скоростей, откладываем в указанном направлении отрезок [ра] длиной 45 мм.
Составляем векторное уравнение, по которому определим скорость точки В, принадлежащей шатуну АВ и ползуну В
VВ
=VA
+VВA
Скорость точки А известна, скорость относительного вращения точки В вокруг точки А перпендикулярна радиусу вращения отрезку АВ и определяется по формуле:
VВА
=
ωВA
·LВA
Скорость точки В направлена вдоль направляющей. Таким образом, получаем векторное уравнение, в котором два вектора известны по направлению, но неизвестны по величине, а третий вектор известен и по величине, и по направлению. Решая это векторное уравнение графическим способом, получим план скоростей для группы Ассура, состоящей из звеньев 2 и 3. В соответствии с векторным уравнением через конец вектора VA
(точку а) проводим направление вектора VВА
перпендикулярное ВА, а через полюс р -направление вектора VВ
, параллельное направляющей. На пересечении этих направлений поставим точку b, а отрезки [аb] и [рb] в масштабе будут представлять скорости VВА
и VВ
. Для определения их величины достаточно на плане измерить соответствующие отрезки и умножить их на масштабный коэффициент μv
.
VВA
= [a b]·μv
= 45 · 0,028 = 1,26 м/с
VВ
= [p b] ·μv
= 0 м/с
Пользуясь построенным планом скоростей, можно определить угловую скорость ωВА
по формуле:
ωВА
=VВA
/ LAВ
= 1,26 / 0,52 = 2,42 рад/с
Для определения направления ωВА
переносим вектор VВA
в точку В механизма и рассматриваем движение этой точки относительно точки А по направлению скорости VВА.
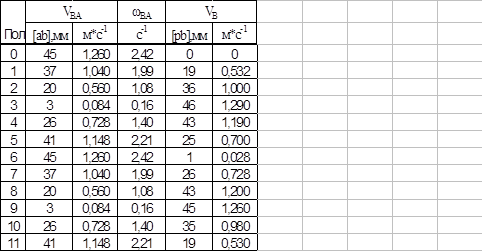
Изложенным выше способом строим планы скоростей для остальных 11 положений.
Результаты построения заносим в таблицу 1.
1.2.3 Построение планов ускорений
Определяем ускорение точки А. Так как кривошип по условию движется равномерно (угловое ускорение равно нулю), то ускорение точки А состоит только из нормальной составляющей, которая равна:
аА
= аА
n
=ω2
· LОА
аА
= 142
· 0,09 = 17,64 м/с2
Вектор аА
направлен по радиусу к центру - от точки А к точке О. Задаемся масштабом плана ускорений μа
=0,392 м·с-2
/мм и вычисляем длину отрезка [ра], изображающего в этом масштабе вектор аА
:
[ра
a]= aA
/μa
= 17,64 / 0,392 = 45 мм
Из произвольной точки ра
, называемой полюсом плана ускорений, в направлении вектора аА
откладываем отрезок [ра
a].
Переходим к группе Ассура звенья 2,3.
Векторное уравнение для точки В группы имеет вид:
āВ
=āА
+āВА
Ускорение āВA
слагается из нормальной и касательной составляющих:
āВA
= āВA
n
+āВA
τ
Ускорение āВA
n
по величине равно:
āВA
n
= ωВA
2
· LВА
 āВA
n
= 1,992
· 0,52 = 2,06 м/с2 āВA
n
= 1,992
· 0,52 = 2,06 м/с2
Вычисляем его величину и откладываем в масштабе μа
от точки а плана ускорений в направлении от точки В к точке А механизма отрезок [an], равный по величине
[an] = аВA
n
/μa
= 2,06 / 0,392 = 5,25 мм
Ускорение āВA
τ
определяется по формуле: āвA
τ
┴ āВA
п
Вектор āВ
направлен вдоль направляющей. Таким образом, получаем векторное уравнение, в котором два неизвестных по величине, но известных по направлению вектора. Для их определения продолжим построение плана ускорений. Из точки n плана проведем направление вектора āВA
τ
(перпендикулярно ВА),а из точки ра
-параллельно направлению āВ
(параллельно направляющей). На пересечении этих прямых поставим точку b. Получаем отрезки [ра
b] и [n b], которые в масштабе изображают соответственно ускорение āВ
из āВA
τ
, т.е.
āВ
=[ра
b] ·μa
=34 · 0,392 = 13,33 м/с2
āВA
τ
=[n b] ·µа
= 25 · 0,392 = 9,8 м/с2
Зная āВA
τ
, определяем величину углового ускорения εВA
:
εВA
= āВA
τ
/LВA
= 9,8 / 0,52 = 18,84 рад/с2
Направление углового ускорения определится после переноса вектора āВA
τ
в точку В механизма.
Результаты построения заносим в таблицу 2.
| № п/п |
 |
 |
 |
 |
 |
| мм |
 |
мм |
|
мм |
|
 |
мм |
|
| 1 |
5,25 |
2,06 |
25 |
9,8 |
25,5 |
9,99 |
18,84 |
34 |
13,33 |
| 11 |
6,5 |
2,54 |
20 |
7,84 |
21 |
8,23 |
15,08 |
34 |
13,33 |
1.3 Кинематический анализ методом построения диаграмм
Диаграммы строятся для 12 положений механизма, которые были изображены на плане положений. Полный оборот кривошипа ОА соответствует одному кинематическому циклу.
| 0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
| В0
Ві
|
0 |
4 |
16 |
34 |
52 |
67 |
72 |
67 |
52 |
33 |
16 |
4 |
| ψ |
4 |
8,5 |
11 |
12 |
12 |
7 |
2,5 |
-4 |
-7 |
-9 |
-6 |
-2 |
Рассмотрим построение диаграммы перемещений ползуна В S=f(φ). Проводим координатные оси S и φ. На оси φ откладываем 12 равновеликих отрезков 0-1. 1-2,2-3 и т.д., соответствующих углу поворота кривошипа на 1/12 часть оборота (30°). Через точки 1, 2, 3 и т.д. проводим ординаты и откладываем на них отрезки, равные координатам точки Вi
в соответствующих положениях, отсчитываемых от крайнего левого положения точки В0
. Соединяя полученные точки плавной кривой линией, изображаем диаграмму SВ
= f(φ).
Масштаб перемещений μs = 0,0025м/мм. Масштаб углов φ равен:
μφ
=2π/[0-12]= 2 · 3,14 / 180 =0,035 рад / мм
где [0 -12]- отрезок (мм) по оси φ, изображающий полный оборот кривошипа ОА.
Построение кривых V=f(φ) и a=f(φ) выполняется способом графического дифференцирования (методом хорд). При этом масштабные коэффициенты диаграмм определяются по формулам:
μV
=μS
·ω/μφ
·[ОН], м·с-1
/мм μV
=0,0025·14/0,035·30 = 0,033м/с/мм
μа
=μV
·ω /μφ
·[ОН1
], м·с-2
/мм μа
=0,033·14/0,035·30 = 0,44 м/с2
/мм
Далее следует построить диаграмму углового перемещения шатуна АВ. Угловое перемещение измеряют в градусах, отсчитывая его от направляющих еВ.
Масштабный коэффициент μа
удобнее представлять в рад/мм, воспользовавшись для перевода из градусов в радианы известной формулой: 1 рад =π/180о
Так как ω=dψ/dφ то достаточно выполнить графическое дифференцирование предыдущей диаграммы ψ =f(φ), используя при этом метод хорд. Масштабный коэффициент μω
определится по формуле:
μω
=μψ·ω/μφ
·[ОН2
],рад/с/мм
μω
=0,0174 · 14 / 0,035 ·30 = 0,232 рад/с/мм
где Н2
- полюсное расстояние диаграммы, мм.
1.4 Сравнение результатов кинематического исследования, выполненного графическим и графоаналитическим методами
В ходе кинематического исследования с помощью диаграмм были получены значения скоростей, ускорений и угловых скоростей ползуна В. Эти же кинематические параметры были определены с помощью планов. Поэтому целесообразно сравнить их и сделать вывод о правильности и точности проведения анализа. Результаты сравнения сводим в таблицу 3.
| Пол |
VВ,
м·с-1
|
аВ
, м·с-2
|
ωАВ
, с-1
|
| По плану |
По диаг.
мм м/с
|
По плану |
По диаг.
мм м/с
|
По плану |
По диаг.
мм рад/с
|
| 0 |
0 |
0 |
0 |
2,42 |
10,5 |
2,43 |
| 1 |
0,532 |
16 |
0,533 |
13,33 |
30,5 |
13,42 |
1,99 |
8,5 |
1,97 |
| 2 |
1 |
30 |
1 |
1,08 |
4,5 |
1,044 |
| 3 |
1,29 |
38,5 |
1,283 |
0,162 |
0,5 |
0,16 |
| 4 |
1,19 |
35,5 |
1,183 |
1,4 |
6 |
1,392 |
| 5 |
0,7 |
21 |
0,7 |
2,21 |
9,5 |
2,2 |
| 6 |
0,028 |
1 |
0,03 |
2,42 |
10,5 |
2,43 |
| 7 |
0,728 |
22 |
0,73 |
1,99 |
8,5 |
1,97 |
| 8 |
1,2 |
36 |
1,2 |
1,08 |
4,5 |
1,044 |
| 9 |
1,26 |
38 |
1,266 |
0,162 |
0,5 |
0,16 |
| 10 |
0,98 |
29,5 |
0,983 |
1,4 |
6 |
1,392 |
| 11 |
0,53 |
16 |
0,533 |
13,33 |
30,5 |
13,42 |
2,21 |
9,5 |
2,2 |
2. Кинематический анализ кулачкового механизма
2.. Исходные данные
R1
=40 мм
R2
=20 мм
R3
=15мм
К=48,7 мм
ω2
=14
2.2 Построение кинематических диаграмм
Кулачковый механизм – это механизм состоящий из ведущего звена криволинейной формы (кулачка) и выходного звена (толкателя), которые образуют между собой высшую кинематическую пару.
Кинематический анализ чаще всего выполняется графическим или графоаналитическим методами.
При графическом методе сначала строится график изменения перемещения толкателя в функции фазового угла поворота кулачка, а затем методом графического дифиринцирования строятся графики изменения аналогов скорости и ускорения толкателя. Этот метод позволяет выделить на графике перемещения фазовые углы, при которых толкатель поднимается, опускается или находится в состоянии покоя.
Найдем перемещения нашего толкателя с помощью метода инверсии:
сущность метода инверсии состоит в том, что всей системе «кулачек-толкатель-стойка» задается вращение с угловой скоростью равной угловой скорости начального механизма, но противоположно направленный. Характер относительного движения между кулачком и толкателем при этом сохраняется, а для определения перемещения толкателя достаточно на линии этого перемещения найти разницу между начальным и текущим положением.
Таблица перемещения толкателя.
| 0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
| S |
0 |
0 |
0 |
0 |
1 |
15 |
23 |
20 |
7 |
1,5 |
0 |
0 |
Строим графики и найдем масштабы:
μφ
=  = =  = 0,0174 = 0,0174 
μ S
= 1
μV
=  = = 
μа
=  = = 
2.3 Нахождение угла давления
Находим угол давления толкателя на кулачек – это угол между направлением скорости толкателя и нормалью проведенной к профилю кулачка в точке касания кулачка и толкателя.
Строим график зависимости угла давления от угла поворота кривошипа.
Таблица угла давления.
| 0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
| γ |
13 |
13 |
13 |
13 |
-15 |
-33 |
0 |
36 |
41 |
26 |
13 |
13 |
Масштаб графика угла давления:
μγ
= 1 
3. Кинематический анализ зубчатого механизма
Исходные данные:
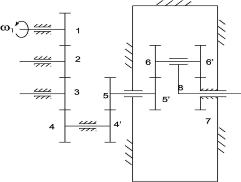
| 1 |
2 |
3 |
4 |
4′ |
5 |
5′ |
6 |
6′ |
7 |
8 |
| Z |
15 |
20 |
20 |
30 |
11 |
22 |
15 |
36 |
37 |
14 |
--- |
ω8
= 14 
m=6 мм
3.1 Аналитический метод
Определяем передаточное отношение от колеса1 к колесу 8:
і1-8
= і1-4
· і4′-5
· і(7)
5′-8
Определяем каждый множитель:
і1-4
= (-1)к=3  =
=
і4′-5
= (-1)к=1  =
=
і(7)
5′-8′
=1- і(8)
5′-7
=1- і 5′-6
· і 6′-7
=
і1-8
= -2· (-2)· 0,091= 0,367
і1-8
= , ,
так как ω1
> ω8
в 0,367 раза: значит у нас мультипликатор.
Определяем угловую скорость 1 колеса:
ω1
= і1-8
· ω8
= 0,367 ∙ 14 = 5,145
3.2 Графический метод
Определяем радиусы зубчатых колес нашего механизма по формуле
rі
= : :
r1
= мм; r2
= мм; r2
=  мм; r3
= мм; r4
= мм; r3
= мм; r4
=  мм; мм;
r4′
=  мм; r5
= мм; r5
=  мм; r5′
= мм; r5′
=  мм; r6
= мм; r6
=  мм; мм;
r6′
=  мм; r7
= мм; r7
=  мм; r8
= r7
+ r6′
= 42 + 111 = 153 мм. мм; r8
= r7
+ r6′
= 42 + 111 = 153 мм.
На листе ватмана строим наш механизм в масштабе μl
= 3 мм/мм.
Рядом с механизмом проводим вертикальную линию, на которой все скорости будут равны нулю, сносим на нее все центры колес и полюсы зацепления, предварительно обозначив их на кинематической схеме.
Определяем скорость движения водила 8:
V8
= r8
· ω8
= 153 ∙ 14 = 2142 мм/с
Отложим отрезок О6
О′6
= 100 мм и определяем масштаб картины распределения скоростей:
μV
=
Соединим т. О′6
с точкой Р6′7
и продлим до линии Р5′6
. На пересечение получаем точку Р′5′6
. Соединим ее с точкой О5
и продлим до линии Р4′5
. Полученную на пересечение точку Р′4′5
соединим с точкой О4
и продлим до линии Р34
.На пересечение получаем точку Р′34
. Соединим ее с точкой О3
и продлим до линии Р23
. Полученную на пересечение точку Р′23
соединим с точкой О2
и продлим до линии Р12
. Получаем точку Р′12
соединяем ее с точкой О1
и мы получим картину распределения скоростей по 1 колесу.
На вертикальной линии ставим точку О и проводим, через нее, горизонтальную линию. Вниз отложим произвольный отрезок ОН. Проведем через точку Н линии параллельные О1
Р′12
, О6
О4
и т. д.
Найдем масштаб угловой скорости:
μω
=
Определяю угловую скорость колес:
ω1
= [01]· μω
= 21,5 ∙ 0,238= 5,11 рад/с
ω2
= [02]· μω
= 16 ∙ 0,238= 3,8 рад/с
ω3
= [03]· μω
= 16 ∙ 0,238= 3,8 рад/с
ω4
= [04]· μω
= 10 ∙ 0,238= 2,38 рад/с
ω5
= [05]· μω
= 5,5 ∙ 0,238= 1,31 рад/с
ω6
= [06]· μω
= 2 ∙ 0,238= 0,476 рад/с
Определяем погрешность:
Δ= %= %=
Определяем угловые скорости остальных колес, и результаты заносим в таблицу:
| 1 |
2 |
3 |
4 |
4′ |
5 |
5′ |
6 |
6′ |
7 |
8 |
| Z |
15 |
20 |
20 |
30 |
11 |
22 |
15 |
36 |
37 |
14 |
--- |
| ω |
5,11 |
3,8 |
3,8 |
2,38 |
2,38 |
1,31 |
1,31 |
0,476 |
0,476 |
--- |
14 |
4. Кинетостатический (силовой) расчет механизма
Основные задачи силового исследования.
Задачей силового исследования является определение реакций в кинематических парах механизма, находящегося под действием внешних сил. Закон движения при этом считается заданным. Для того чтобы ведущее звено двигалось по заданному закону необходимо к нему приложить так называемую уравновешивающую силу (или уравновешивающий момент), которая уравновешивает все внешние силы и силы инерции. Определение уравновешивающей силы или уравновешивающего момента наряду с определением реакций в кинематических парах также является задачей силового исследования механизма.
Для осуществления силового расчета какой-нибудь кинематической цепи необходимо, чтобы она была статически определимой, т.е. чтобы число уравнений, которые можно составить для кинематической цепи, было равно числу неизвестных. Такой статически определимой цепью является группа Ассура - кинематическая цепь с нулевой подвижностью.
Силовой расчет выполняется в порядке, обратном кинематическому исследованию, т.е. сначала ведется расчет группы Ассура, наиболее удаленной от начального механизма.
4.1 Определение внешних сил и сил инерции
4.1.1 Определяем массу звеньев и их вес
 12∙0,09 = 1,08 кг 12∙0,09 = 1,08 кг
Принимаем 
 1,08∙ 10 =10,8 Н 1,08∙ 10 =10,8 Н
 12 ∙ 0,52 =6,24 кг 12 ∙ 0,52 =6,24 кг
 6,24 ∙ 10 =62,4 Н 6,24 ∙ 10 =62,4 Н
 3,5 ∙ 6,24 = 21,84 кг 3,5 ∙ 6,24 = 21,84 кг
 21,84 ∙10 = 218,4 Н 21,84 ∙10 = 218,4 Н
4.1.2 Определяем силы и моменты инерции
  1,08∙ 8,82 = 9,52 Н 1,08∙ 8,82 = 9,52 Н
 6,24 ∙ 14,89 = 92,95 Н 6,24 ∙ 14,89 = 92,95 Н
 21,84 ∙13,33 = 291,12Н 21,84 ∙13,33 = 291,12Н
4.1.3 Определяем результирующие силы
 7000∙ 0,0025∙4 =70 Н 7000∙ 0,0025∙4 =70 Н
4.2 Силовой анализ без учета сил трения
4.2.1 Силовой анализ группы Ассура звеньев 2 и 3.
Запишем уравнение равновесия в виде:

Находим из него величину тангенциальной составляющей:
-

Определяем нормальную составляющую и реакцию взаимодействия третьего звена со стойкой:


Принимаем масштабный коэффициент  3 Н/мм 3 Н/мм
Из плана сил находим:
 150∙3=450 Н 150∙3=450 Н
 150∙3=450 Н 150∙3=450 Н
 101∙ 3= 303 Н 101∙ 3= 303 Н
Найдем силу  , для чего запишем уравнение равновесия в таком виде: , для чего запишем уравнение равновесия в таком виде:

 3Н 3Н
Находим из плана сил неизвестную величину:
 124 ∙ 3 = 372 Н 124 ∙ 3 = 372 Н
4.2.2 Силовой анализ начального механизма:





5 Н/мм
 78 ∙ 5 = 390 Н 78 ∙ 5 = 390 Н
4.3 Проверка по теореме Жуковского
Разложим моменты инерции на пары сил:
Находим уравновешивающую силу:

 
 

Определяем погрешность:
  %=3,84% %=3,84%
4.4 Силовой анализ механизма с учетом сил трения
Каждую группу Ассура и начальный механизм догружаем силами и моментами трения. И повторяем расчет с пункта 4.4.
 0,1=0,133 0,1=0,133
 0,1· 303= 30,3 Н 0,1· 303= 30,3 Н
 0,133·0,02·372= 0,989 Н∙м 0,133·0,02·372= 0,989 Н∙м
 0,133·0,02·450 = 1,19 Н∙м 0,133·0,02·450 = 1,19 Н∙м
 0,133·0,02·390 = 1,03 Н∙м 0,133·0,02·390 = 1,03 Н∙м
где r=0.02 – радиус цапфы.







 162 ∙ 3 = 486 Н 162 ∙ 3 = 486 Н




Найдем разницу:
 258,67 – 217 = 41,67 Н 258,67 – 217 = 41,67 Н
5. Динамический анализ механизма. Подбор маховика
5.1 Основные задачи динамического анализа
В ходе динамического анализа определяем приведенные моменты сил сопротивления и движущих сил, приведенные моменты инерции, а также решается основное уравнение движения, и определяем момент инерции маховика по методу Витенбауэра.
Исходными данными являются кинематические параметры, определенные в ходе кинематического исследования.
5.2 Определяем приведенные моменты сил сопротивления для всего кинематического цикла главного механизма
| 0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
| F, Н |
0 |
70 |
280 |
595 |
910 |
1172,5 |
0 |
0 |
0 |
0 |
0 |
0 |
| Vі,м/с |
0 |
0,532 |
1 |
1,29 |
1,19 |
0,7 |
0,028 |
0,728 |
1,2 |
1,26 |
0,98 |
0,53 |
| Мпс,Нм |
0 |
2,66 |
20 |
54,83 |
77,35 |
58,63 |
0 |
0 |
0 |
0 |
0 |
0 |
Находим Мпс для 12 положений и результаты заносим в таблицу 1.
По результатм табл.1 строим график зависимости приведенного момента сил сопротивления от угла поворота кривошипа Мпс=f(j).
mj = 0,035 рад/мм; mм = 1 
5.3 Определение работы сил сопротивления и работы движущих сил
Ас =
Определяем работу сил сопротивления методом графического интегрирования
mА=mмmj[ОН], Дж/мм. mА=1∙ 0,035∙30 = 1,05 Дж/мм
Приняв момент движущих сил постоянным учитывая, что при установившемся режиме работы машинного агрегата в начале и в конце цикла работа движущих сил равна работе сил сопротивления. На построенном графике работы сил сопротивления строим график работы движущих сил.
Определяем величину момента движущих сил:
Мдв=[ОР] mм = 19∙ 1 = 19 Н∙м
5.4 Решение уравнения движения машинного агрегата
DТі=Аді-Асі
| 0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
| [DТі] |
0 |
9 |
13 |
4 |
19 |
56 |
58 |
48 |
38 |
29 |
19 |
9 |
| DТі |
0 |
9,45 |
13,65 |
4,2 |
-19,95 |
-58,8 |
-60,9 |
-50,4 |
-39,9 |
-30,45 |
-19,95 |
-9,45 |
5.5 Определение приведенного момента инерции для 12 положений механизма
Iпі
=
Результаты вычислений заносим в табл 2.
| ω2
|
ω2
2
|
VB
2
|
Iпі
|
| 0 |
196 |
5,85 |
0 |
0,734 |
| 1 |
196 |
3,96 |
0,283 |
0,914 |
| 2 |
196 |
1,166 |
1 |
1,236 |
| 3 |
196 |
0,026 |
1,66 |
1,519 |
| 4 |
196 |
1,96 |
1,416 |
1,408 |
| 5 |
196 |
4,88 |
0,49 |
1,093 |
| 6 |
196 |
5,85 |
0,00078 |
0,761 |
| 7 |
196 |
3,96 |
0,53 |
1,042 |
| 8 |
196 |
1,166 |
1,44 |
1,396 |
| 9 |
196 |
0,026 |
1,587 |
1,485 |
| 10 |
196 |
1,96 |
0,96 |
1,211 |
| 11 |
196 |
4,88 |
0,281 |
0,934 |
Строим график зависимости приведенного момента инерции как функция от угла поворота кривошипа.
5.6 Определение момента инерции маховика по методу Витенбауэра
Строим с использованием графиков DТ как функция от j и Іпр как функция от j кривую Витенбауэра т.е. зависимость DТ=f (Іпр).
Определяем тангенсы углов наклонов касательных соответственно max и min угловым скоростям ведущего звена.
tgymax= w2
ср
(1+d) = w2
ср
(1+d) = =1,05 =1,05
tgymin= w2
ср
(1-d) ==0,817 w2
ср
(1-d) ==0,817
wср
=w1
ymax =46,4º
ymin =39,24º
Iмах
= = =
5.7 Определение геометрических размеров маховика
Учитывая, что маховик представляет собой колесо с массивным ободом его момент инерции:
Iмах
=mR2
ср
=mД2
ср
/4
Предварительно задаемся Дср
конструктивно
Дср
=5rкрив.
=5∙0,09= 0,45 м
m=4Iмах
/Д2
ср
=
Пренебрегая массой ступицы и спиц определяем массу через размеры маховика:
m=gbh Дср
π, где g=7*103
кг/м3
-удельный вес
Задаемся соотношением b и h
h=0,75 b
Тогда m=g0,75b2
Дср
π
b= = =
Проверяем, не получился ли у нас маховик слишком толстым или слишком вытянутым в диаметральном направление.
b=(1/3÷1/5) Дср
=(0,15÷0,09)м
Условие выполняется.
h=0.75∙ b= 0,75∙ 0,092 = 0,069 м
5.8 Определение угловой скорости после установки маховика
Реальную угловую скорость кривошипа определяем для 12 положений по формуле:
wi
=  ; ;
где: Iмах
=3,17 кг∙м2
w2
max=wср
2
(1+δ)=142
∙ (1+1/8)= 220,5
 , DТ max- координаты точки касания прямой проведенной под углом ymax с кривой Витенбауэра. , DТ max- координаты точки касания прямой проведенной под углом ymax с кривой Витенбауэра.
Результаты определения угловой скорости заносим в таблицу 3
| 0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
| Iпі
|
0,734 |
0,914 |
1,236 |
1,519 |
1,408 |
1,093 |
0,761 |
1,042 |
1,396 |
1,485 |
1,211 |
0,934 |
| DТі |
0 |
9,45 |
13,65 |
4,2 |
-19,95 |
-58,8 |
-60,9 |
-50,4 |
-39,9 |
-30,45 |
-19,95 |
-9,45 |
| wі |
14,57 |
14,21 |
14,03 |
13,98 |
14,02 |
13,99 |
13,92 |
13,82 |
13,36 |
13,39 |
13,91 |
14,11 |
По результатам расчетов строим график изменения w кривошипа:
mw
= 0,1 
Список использованной литературы
1.
Артоболевский И.И. Теория механизмов и машин. – М.: Наука. 1975. – 638 с.
2.
Теория механизмов и машин: Учебн. для Вузов. Под. ред. К.В. Фролова, М.: Высш. шк., 1987. – 496 с.: ил.
3.
Методичні вказівки до виконання курсового проекту з дисципліни «Теорія механізмів і машин» (для студентів заочної форми навчання спеціальності 7.090220 «Обладнання хімічних виробництв і підприємств будівельних матеріалів»). /Уклад.: О.Г. Архипов, Е.М. Кравцова, Н.І. Галабурда. – Сєвєродонецьк: Вид-во СТІ, 2006. – 12 с.
|
