| Національний технічний університет України
“Київський політехнічний інститут”

Методичні вказівки
Лещишин Олександр Володимирович
Київ 2005
Зміст
1. Класифікація похибок вимірювання та методів вимірювання. 5
2. Визначення вимірювального приладу, перетворювача, пристрою, вимірювальної системи. 7
3. Визначення, класифікація і структури інформаційно-вимірювальних систем. 8
4. Класифікація вимірювальних приладів на групи та підгрупи в залежності від призначення та від вимірювальної фізичної величини. Позначення вимірювальних приладів. 10
5. Характеристики та структури вимірювальних приладів. 12
6. Використання мікропроцесорів та ЕОМ у вимірювальних приладах та системах. 14
7. Прилади для вимірювання частоти. Типи частотомірів, похибка вимірювання частоти. 15
8. Метод фігур Лісажу для вимірювання частоти. 16
9. Резонансні частотоміри, їх типи, параметри. 17
10. Метод послідовного відліку в цифрових частотомірах, складові похибки цифрового частотоміра. 20
11. Структурна схема і робота електронного частотоміра в режимі вимірювання частоти. 21
12. Вимірювання низьких і інфранизьких частот електронним частотоміром. 22
13. Вимірювання періоду електронним частотоміром. Складові похибки вимірювання. 23
14. Вимірювання відношення частот електронним частотоміром. Похибки вимірювання. 24
15. Вимірювання інтервалу часу між двома імпульсами електронним частотоміром. Похибки вимірювання. 25
16. Вимірювання фронтів імпульсних сигналів електронним частотоміром. Похибки вимірювання. 26
17. Гетеродинний метод у вимірювальних приладах. 27
18. Прямий та непрямий метод помноження частоти. 29
19. Метод дискретного гетеродинного перетворення частот в цифрових частотомірах. Структурна схема і робота НВЧ частотоміра. 30
20. Метод гетеродинного перенесення частот. Структурна схема і робота НВЧ частотоміра. 33
21. Прилади і методи для вимірювання малих величин інтервалу часу. 34
22. Підвищення точності вимірювання інтервалу часу методом затриманих співпадань. 36
23. Ноніусний метод підвищення точності вимірювання інтервалу часу. 38
24. Метод статистичних випробувань у вимірювачах інтервалу часу. 40
25. Фазометри, їх типи та використання. 42
26. Осцилографічні методи вимірювання різниці фаз. 43
Реклама

27. Компенсаційний метод вимірювання різниці фаз. Типи фазообертачів та їх параметри. 45
28. Фазометри з перетворенням різниці фаз в напругу. 47
29. Цифровий фазометр миттєвого значення. Параметри, переваги та недоліки. 49
30. Цифровий фазометр з усередненням. 51
31. Розширення частотного діапазону фазометрів. 52
32. Вимірювання різниці фаз методом суми та різниці векторів. 53
33. Прилади для вимірювання АЧХ. Переваги та недоліки панорамних вимірювачів АЧХ. 55
34. Робота та складові частини панорамних приладів для вимірювання АЧХ. 56
35. Генератори хитної частоти. Методи лінеалізації модуляційних характеристик ГЧХ. 57
36. Розширення діапазону частот в панорамних вимірювачах АЧХ. Формування частотних відміток в панорамних приладах. 58
37. Мікропроцесорний панорамний вимірювач АЧХ. 60
38. Панорамний мікропроцесорний вимірювач АЧХ з синтезатором частот. 61
39. Спектроаналізатори паралельного типу для вимірювання спектрів сигналу одиночних імпульсних сигналів. 62
40. Спектроаналізатор послідовного типу. Робота по структурній схемі. 63
41. Параметри спектроаналізаторів послідовного типу і методи підвищення їх роздільної здатності і швидкодії. 65
42. Вимірювання не лінійності амплітудних характеристик електронних вузлів та систем. Корекція наскрізних амплітудних характеристик систем. 67
43. Коефіцієнт гармонік і нелінійних спотворень. Методи їх вимірювання. 68
44. Вимірювання коефіцієнта гармонік на фіксованій частоті. 70
45. Статистичний метод вимірювання коефіцієнта гармонік. 71
46. Типи модуляції і методи вимірювання параметрів модульованих сигналів. 72
47. Осцилографічні методи вимірювання коефіцієнта амплітудної модуляції. 73
48. Модулометри та девіометри. 75
49. Панорамний прилад для вимірювання опору навантаження в НВЧ діапазоні. 76
50. Панорамний прилад для вимірювання коефіцієнта стоячої хвилі. 77
51. Імпульсний рефлектометр. 79
52. Панорамний прилад для вимірювання комплексних коефіцієнтів передачі НВЧ компонент та S-параметрів матриці розсіювання. 80
53. Типи цифрових вольтметрів і мультиметрів на їх основі. 81
54. Цифрові вольтметри прямого відліку. 83
55. Цифрові вольтметри з подвійним інтегруванням. 84
56. Цифрові вольтметри з цифровим інтегруванням. 86
57. Цифрові осцилографи. 87
58. Режими роботи, використання і особливості багатоканальних та багатопроменевих аналогових осцилографів. 88
59. Типи шумів, їх вплив на параметри конгровимірювальних приладів, корисне використання шумів. 90
Реклама

60. Характеристики та параметри шумів (не детермінованих сигналів) і їх вимірювання. 92
61. Генератори шумів. Робота, структурна схема, особливості для різних діапазонів частот. 95
62. Використання аналогових та цифрових кореляторів для виділення періодичних сигналів із шумів (адитивної суміші). 97
63. Вимірювання енергетичного спектра шумів. Зв'язок енергетичного спектра з функцією кореляції. 98
64. Аналогові та цифрові вимірювачі інтегральної ймовірності випадкових сигналів. Ефективне та квазіпікове значення шуму. Пікфактор. 107
65. Аналогові та цифрові вимірювачі густини ймовірності випадкових сигналів. 109
66. Визначення та вимірювання коефіцієнта шуму електронних систем. 111
Виталий Кушниров
1.Класифікація похибок вимірювання та методів вимірювання.
Похибка – це відхилення результату вимірювання від дійсного значення вимірювальної величини.
Класифікація похибок вимірювання.
1. Систематичні (можна компенсувати) по виникненню розділяють на:
· Методологічні.(неточність формул, вплив приладу)
· Апаратурні.(недосконалість приладів, вплив напруги, температури)
· Суб’єктивні.(недосконалість органів людини, зв’язана з індивідуальними особливостями; при використані цифрових приладів – зникає)
Також їх розділяють на постійні та змінні.
2. Випадкові. Виникають в випадку одночасного впливу на об’єкт вимірювання декількох незалежних величин, зміни яких носять флуктуаціонний характер. Вона характеризується щільність розподілу ймовірностей  , де F(∆) – функція розподілу. , де F(∆) – функція розподілу.
Випадкові похибки описують статистичними параметрами:
1. Математичне очікування.
2. Дисперсія.
3. Закон розподілу щільності ймовірності.
4. Довірчий інтервал, довірча ймовірність.
3. Відносні.  . .
4. Абсолютні.  , де А – данні з приладу, а Ах
– дійсне значення вимірювальної величини. , де А – данні з приладу, а Ах
– дійсне значення вимірювальної величини.
5. Приведена. , де Ак
– нормоване значення шкали. , де Ак
– нормоване значення шкали.
6. Мультиплікативні. Залежить від значення вимірювальної величини.
7. Адитивні. Не залежить від значення вимірювальної величини.
8. Точність приладу. Числено дорівнює найбільшій допустимій приведеній похибки  . .
Метод вимірювання – це сукупність використання принципів та засобів вимірювання.
1. Метод безпосередньої оцінки.(значення величини визначають безпосередньо з приладу)
2. Метод порівняння.(більш точний ніж перший; порівнюється з однорідною незалежною величиною )
· Нульовий метод (компенсаційний) – результуючий ефект впливу двох величин на вимірювальний пристрій доводять до 0.
· Диференційний – вплив різниці вимірювальної та відомої величини.
· Метод співпадіння - утворюються рівність значень вимірювальної та відомої величини та фіксується по спів падінню відміток шкали, сигналів.
· Метод заміщення - вимірювальну величину замінюють однорідної з нею величиною відомого розміру, яка дорівнює розміру заміненої величини, що визначається по збереженню режиму в вимірювальному ланцюгу.
2. Визначення вимірювального приладу, перетворювача, пристрою, вимірювальної системи.
Вимірювальний прилад
– це засіб вимірювання, призначений для формування сигналу, вимір інформації доступний для безпосереднього сприйняття спостерігачем.
Вимірювальний перетворювач
– це засіб вимірювання, для формування сигналу у формі зручній для передачі, обробки, зберігання.
Вимірювальний пристрій
– це вимірювальний прилад + вимірювальний перетворювач.
Вимірювальна установка
– це сукупність функціональних об’єднаних засобів вимірювання і допоміжних пристроїв для формування вимірювальних сигналів для безпосереднього спостереження, розміщені в одному місці.
Вимірювальна система
– це сукупність засобів вимірювання і допоміжних пристроїв об’єднаних каналами зв’язку і формування для автоматичної обробки і використання, передачі і використання в різних системах керування.
3. Визначення, класифікація і структури інформаційно-вимірювальних систем.
Вимірювальні системи найбільш розповсюдженні.
Інформаційно-вимірювальні системи (ІВС)
– це системи, які призначені для автоматичного отримання кількісної інформації безпосередньо від об’єкту методом вимірювання і контролю, обробки цієї інформації, видачі її, а також керування самим об’єктом.
Існує 4 типи ІВС:
По функціональному призначенню.
1. Вимірювальні ІВС.
2. Регулюючі ІВС.
3. Діагностичні ІВС.
4. Розпізнавальні системи.
По виду (вигляду) вхідних величин:
По кількості, по розміщенню в просторі, по виду сигналів.
По відношенню до перешкод.
По виду вихідних величин:
Число, графік, кількісні міркування, діагностичні.
По принципу побудови:
Наявність каналів зв’язку, уніфікація складу, порядок виконання операції, інформаційна і структурна надмірність, адаптація до вимірювальної величини.
По формі сигналів.
По методу ущільнення каналів зв’язку.
По структурі:
Ланцюгова система.

Шинна. (Паралельна система)
Зіркова (радіальна).
Магістральна (петльова).
Радіально-кільцева.
Стільникова.
Ієрархічна.
Вимірювальна ІВС призначена для вимірювання, має ЦП та локальні пристрої.
ІВС автоматичного контролю має вимірювальну ІВС із ЕОМ вищого рівня, яка через інтерфейс по каналам зв’язку в ЦП поступають вставки для кожного параметру, який регулює систему. В залежності від того яка різниця між заданими параметром і фактичним значенням (ЦП порівнює їх) на об’єкті виділяється зона грубого регулювання.(ЦП видає команду для швидкої зміни регулюючого механізмам). По мірі зменшення різниці між вимірюючим параметром і вставкою, при досягненні малої різниці переходимо в зону точного регулювання, виконавчий механізм відпрацьовує повільніше, щоб не було пере регулювання. Коли різниця буде менше порогового значення (зона чутливості), то команди взагалі не поступають.
4. Класифікація вимірювальних приладів на групи та підгрупи в залежності від призначення та від вимірювальної фізичної величини. Позначення вимірювальних приладів.
Згідно з ГОСТ 15094-69 усі радіовимірювальні прилади поділяються на 20 підгруп в залежності від вимірювальної величини та від призначення. Кожна підгрупа має свою букву присвоєну за алфавітом, цифру, яка вказує ознаки вимірювальної величини.
| В
|
2
|
-
|
______
|
____
|
| буква (підгрупа)
|
Цифра (номер
пристрою в підгрупі)
|
тип приладу
|
буква
|
| Прилади для вимірювання сили струму (I)
|
А
|
| Джерела живлення для вимірювань і вимірювальних пристроїв
|
Б
|
| Прилади для вимірювання напруги (U)
|
В
|
| Вимірювальні генератори
|
Г
|
| Атенюатори і прилади для вимірювання послаблення
|
Д
|
| Прилади для вимірювання параметрів компонентів і кіл з зосередженими параметрами
|
E
|
| Прилади для імпульсних вимірювань
|
И
|
| Комплексні вимірювальні установки
|
К
|
| Пристрої загального використання для вимірювання параметрів електронних ламп та напівпровідникових приладів
|
Л
|
| Пристрої для використання потужності
|
М
|
| Пристрої для вимірювання напруженості поля
|
П
|
| Прилади для вимірювання параметрів елементів і трактів з розподіленими параметрами
|
Р
|
| Пристрої для спостереження, вимірювання і дослідження форми сигналу і спектра
|
С
|
| Вимірювальні підсилювачі
|
У
|
| Пристрої для вимірювання фазового зсуву та групового часу затримки
|
Ф
|
| Прилади для вимірювання характеристик радіо пристроїв
|
Х
|
| Пристрої для вимірювання частоти і часу
|
Ч
|
| Пристрої для вимірювання електричних і магнітних властивостей матеріалів
|
Ш
|
| Вимірювальні прилади коаксіальних і волноводних трактів
|
Э
|
| Модифіковані блоки радіовимірювальних приладів
|
Я
|
Для позначення комбінованих приладів, призначених для вимірювання декількох величин, до основного позначення додається буква К.
Засоби вимірювання описуються технічними характеристиками;
Призначення приладу.
Діапазон вимірювання.
Неінформативні параметри.
Метрологічні характеристики:
Похибка.
Клас точності.
Чутливість.
Поріг чутливості.
Роздільна здатність.
Вхідний та вихідний імпеданс.
Динамічні характеристики (швидкодія, динамічні похибки).
Надійність (час виходу із ладу).
5. Характеристики та структури вимірювальних приладів.
Вимірювальні пристрої
ділять на 3 категорії:
1. Для вимірювання параметрів сигналів.
2. Характеристики мереж з зосередженими і розподіленими параметрами.
3. Генератори сигналів (Джерела вимірювальних сигналів)
По структурі
бувають 3-х типів.
1.
Прямого перетворення:
2.
Прилади порівняння:
За допомогою ЗЗ іде зміна міри xm.
Існує 4 методи порівняння.
1. Нульовий, компенсаційний.
2. Диференційний (утворюються вимірювальні різниці).
3. Метод співпадіння (утворюються різниця і вимірюється битах).
4. Метод заміщення.
3.
Комбіновані структури (поєднання першої та другої структури). Зворотній зв'язок (ЗЗ), який утворює міру, береться після декількох каскадів перетворювачів.
На сучасному етапі вимірювальні пристрої ведеться по широкому використанню цифрової техніки (МП) з метою забезпечення багатофункціональності приладів, а також розробкою панорамних приладів, які автоматизують процес вимірювання і одразу виводять характеристики.
МП підвищують точність і інші технічні параметри.
МП може враховувати систематичну похибку, обробити статистичним методом данні, зменшити випадкову похибку.
Враховувати спотворення (нелінійність) розгортки, спотворення оптики, нерівномірність зображення по полю.
При використанні МП зростає багатофункціональність приладів, проводиться комплексне вимірювання.
Зручно узгоджувати вимірювальний прилад з ЕОМ.
Спрощується (автоматизація) керування КВП (контрольно-вимірювальним приладом) і об’єктом.
Можливе самокалібрування і само діагностика, тобто автоматизація, та ідентифікувати несправність приладу.
Можливість побудови повністю автоматизованих КВП.
Можливість створення інтелектуальних приладів.
Можливе тестування цифрової або аналогової системи.
6. Використання мікропроцесорів та ЕОМ у вимірювальних приладах та системах.
В ряді випадків цифрові вимірювальну прилади утворюють багатопроцесорну систему, в якій вбудовуються спеціалізовані процесори. Процес введення, виведення, обробки, процеси керування, локальні процесори попереднього перетворення сигналів з різних датчиків.
Використання МП та ЕОМ дозволили розробити новий клас цифрових вимірювальних приладів – логери, регістратори даних. Вони побудовані по концепції лінійної організації обміну і по багатоканальному типу. Всі елементи (датчики, виконавчі механізми, індикатори) розглядаються як зовнішні пристрої для МП та ЕОМ. Логери мають до 100 вимірювальних каналів, які опитуються синхронно або несинхронно. Частота опитування може змінюватися в широких межах.
В останній час розроблені цифрові вимірювальні пристрої на основі ПЕОМ. Вони об’єднують апаратні і програмні засоби. В ПЕОМ є надмірність обчислювання потужності, її можна використовувати для підвищення надійності і т.д.
Це дає розумне об’єднання програмних і апаратних засобів на основі побудови ЦВП.
Вова Кучерук
7.Прилади для вимірювання частоти. Типи частотомірів, похибка вимірювання частоти.
Поняття частоти і фази відноситься тільки для гармонічного сигналу. Для періодичного сигналу – це частота першої гармоніки (1/Т).
Типи:
1. Стандарти частоти і часу (Н2
, Rb, Cs – стандарти ).
2. Приймачі сигналів еталонних частот і компараторів.
3. Перетворювачі частоти сигналів ( подільники частоти ), щоб перенести стандарти частоти в той діапазон, де використовуються вимірні прилади.
4. Резонансні частотоміри ( НВЧ ).
5. Цифрові частотоміри.
6. Вимірювачі інтервалів часу ( низькі, інфранизькі частоти ).
В даний час цифрові частотоміри дають відносну похибку 10-8 … 10-10. Резонансні аналогові частотоміри на НВЧ діапазоні: 10-3…10-4. Гетеродинні частотоміри практично не використовуються. Але гетеродинування використовується для перенесення спектра високих частот в більш низькочастотний діапазон, і вимірювання їх допомогою звичайних цифрових частотомірів.
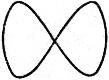
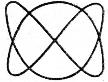
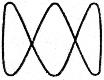
8. Метод фігур Лісажу для вимірювання частоти.
Коли на Х і Y подати різні частоти, то утворяться складні фігури в залежності від співвідношення частот і фаз. По кількості перетинів визначаємо невідому частоту.
Точність вимірювання визначається точністю еталонного генератора
Табл. Фігури Ліссажу.
| φ
|
Відношення частот
|
| 1/1
|
2/1
|
3/1
|
3/2
|
4/3
|
| 0°
|

|
|

|
|

|
| 90°
|

|

|
|

|

|
Такий метод доцільно використовувати, коли відношення частот не більше 10.
На низьких частотах, коли фігура обертається повільно
9. Резонансні частотоміри, їх типи, параметри.
Використовується явище електор-магнітного резонансу, коли невідому частоту подають на еталонний контур.
Один параметр постійний ( L ), а інший можна регулювати.

Похибку можна зменшити в декілька разів, якщо вимірювання проводити на крутих фронтах.
В області НВЧ контур представляє собою об’ємний резонатор, розмір якого змінюється.
Існує 2 схеми з еталонними резонаторами.
Схема по мінімуму.
При резонансі енергія відбивається від площини.
Фіксація по максимуму.
10. Метод послідовного відліку в цифрових частотомірах, складові похибки цифрового частотоміра.
Точність вимірювання визначається :
a. нестабільність кварцового генератора ( відносна похибка  або або  за рік) за рік)
b. Дискретність відліку – найбільша складова похибки  обумовлена випадковістю спів падання початку і кінця серб імпульсу обумовлена випадковістю спів падання початку і кінця серб імпульсу
c. Нестабільність спрацювання формуючого пристрою 1 в наслідок наявності вхідних шумів , в даному несуттєва , оскільки на протязі часу відліку ця складова інтегрується , чим більше відношення сигнал – шум , тим менша ця нестабільність.
Оскільки задаючи генератор в середині приладу ми можемо встановити великі відношення сигнал – шум , нестабільність фронтів строб - імпульсу можемо не враховувати .
 Чим більша вимірювана частота , тим більша вимірювана точність. Чим більша вимірювана частота , тим більша вимірювана точність.
Один із методів підвищення точності – помноження вхідної частоти .
На низьких частотах можемо взяти Тв=10с , звідси  =0,1/fx , fx = 0,1/ =0,1/fx , fx = 0,1/ , можемо знайти та задати певне значення похибки . , можемо знайти та задати певне значення похибки .
Частотоміром доцільно вимірювати частоти більші одиниць , десятків кГц , щоб забезпечити похибку ~ 10 -4
11. Структурна схема і робота електронного частотоміра в режимі вимірювання частоти.
Принцип роботи полягає в тому, що:
1. із сигналу, частоту якого необхідно виміряти, формуються короткі відлікові імпульси.
2. формулюється інтервал відліку ( високостабільний інтервал ).
3. необхідно підрахувати відлікові імпульси на протязі інтервалу відліку
Інтервал відліку – високо стабільний.
Структурна схема електронного частотоміра у режимі вимірювання частоти
ФП – формуючий пристрій
ДП – двійковий лічильник
БК – блок керування
ЦІ – цифровий індикатор
 Гц – високо стабільна. Гц – високо стабільна.
12. Вимірювання низьких і інфранизьких частот електронним частотоміром.
На низьких і інфра-низьких частотах – вимірювання частоти на пряму не доцільне , оскільки виникає досить висока похибка вимірювання , тому замість вимірювання частоти – вимірюють період сигналу , а частоту його знаходять як оберненою до періоду .
Загальна схема самого пристрою залишається незмінно , але змінюється спосіб під єднання зовнішніх пристроїв :
· Кварцовий генератор приєднуємо до входу формуючого пристрою 1 (ФП1
) через вхідний пристрій 1 (ВП1
)
· Вхідний сигнал подаємо на вхідний пристрій 2 (ВП2
)
Чим менша частота - тим точніше вимірюється період Тх


Дима Мулькин
13.Вимірювання періоду електронним частотоміром. Складові похибки вимірювання.
На низьких і інфра-низьких частотах – вимірювання частоти на пряму не доцільне , оскільки виникає досить висока похибка вимірювання , тому замість вимірювання частоти – вимірюють період сигналу , а частоту його знаходять як оберненою до періоду .
Загальна схема самого пристрою залишається незмінно , але змінюється спосіб під єднання зовнішніх пристроїв :
· Кварцовий генератор приєднуємо до входу формуючого пристрою 1 (ФП1
) через вхідний пристрій 1 (ВП1
)
· Вхідний сигнал подаємо на вхідний пристрій 2 (ВП2
)
Чим менша частота - тим точніше вимірюється період Тх


Підвищення точності - можна досягти шляхом помноження частоти f0
Похибки :
· δ0
· За рахунок дискретності відліку δд = 1 / Nx
· δш – Похибка обумовлена шумами вхідного сигналу , які призводять до нестабільної роботи формуючого пристрою . Δτвип. – випадкова зміна переднього і заднього фронтів . 
14. Вимірювання відношення частот електронним частотоміром. Похибки вимірювання.
Структурна схема електронного частотоміра у режимі вимірювання відношення частот
a. Більш високу частоту подають на вхід 1 (ВП1
)
b. Більш низьку частоту подають на вхід 2 (ВП2
)
c. Кварцовий генератор від’єднують від схеми
Nx
– буде пропорційна
частоті f
1
, і обернено пропорційна
f
2
Похибки
:
· δд
= 1 / Nx
· за рахунок нестабільності фронтів строб-імпульсу
( не стабільною являється більш низька частота ) , що визначається відношенням сигнал / шум
Підвищити точність вимірювання
можна шляхом помноження більш високої частоти , і поділенням більш низької частоти.
15. Вимірювання інтервалу часу між двома імпульсами електронним частотоміром. Похибки вимірювання.
Вимірювання часу між двома імпульсами фактично зводиться до вимірювання тривалості імпульсу . Для вимірювання інтервалу часу - потрібно подати імпульси на вхід тригера , перший імпульс – запускаючий , другий імпульс – стоповий , на виході тригера – формується строб імпульс .
Вимірювальний метод має недолік , пов'язаний з не високою швидкодією лічильника і перехідними процесами в тригері .
Для вимірювання в області НВЧ – використовують метод попереднього поділення частоти ( діапазон 600 МГц – 1 ГГц ) , або гетеродинний метод перенесення спектру частот ( діапазон 8 – 12 ГГц ) .
Похибки :
· δ0
· За рахунок дискретності відліку δд
= 1 / Nx
· δш
– Похибка обумовлена шумами вхідного сигналу
16. Вимірювання фронтів імпульсних сигналів електронним частотоміром. Похибки вимірювання.
Для вимірювання часу зміни фронтів імпульсів потрібно встановити два комапатори , я кі повинні бути налаштовані на відповідні рівні ( 0,1
то 0,9
від Umax
) , виходи компараторів приєднуються до тригера , який сформує на виході прямокутний імпульс, довжиною Δt = τфронта
Похибки :
· δ0
· За рахунок дискретності відліку δд
= 1 / Nx
· δш
– Похибка обумовлена шумами вхідного сигналу
17. Гетеродинний метод у вимірювальних приладах.
Гетеродинний метод використовують для перенесення спектру частот з деякого заданого у інший спектр . Використовують як для перенесення сигналу певної частоти як на вищу так і на нижчу частоту . Суть полягає у помноженні напруг сигналів різної частоти . Основа - помножувач частот ( модулятор ).


Модулятор : на вхід подається сигнал , який потім корегується у відповідності до 2-го сигналу .

Операція помноження дає різницю частот .
Змішування двох частот та виділення їх різниці виконується на будь-якому нелінійному елементі або фільтрі . Використовують діоди , транзистори та будь-які інші елементи з нелінійним опором .
На діоді :
на вході :  → → 
на виході буде : ω 1
, ω 2
, ω 1
+ ω 2
, ω 1
– ω 2
Методи дискретного гетеродинного перетворення
.
для визначення вірного знаку потрібно провести вимірювання на n-1 , n та n + 1 гармоніці.
Частотомір з гетеродинним спектром перенесення частот
Гетеродин може змінювати свою частоту неперервно і автоматично відслідковуючи fx
, але так щоб різниця між fx
і н-ю гармонікою гетеродина дорівнювала частоті кварцового резонатора .
fx
± n*fг
= f0
звідси fx
=
n*fг
± f0
 Частота гетеродина підстроюється таким чином , щоб виконувалась умова fx
=
n*fг
± f0 Частота гетеродина підстроюється таким чином , щоб виконувалась умова fx
=
n*fг
± f0
основний недолік – необхідність визначення знаку (±) , тобто проводити додаткові вимірювання на n-1 , n та n + 1 гармоніці
18. Прямий та непрямий метод помноження частоти.
Прямі методи
основані на виділенні гармоніки періодичного сигналу , вхідний сигнал - перетворюють на сигнал типу « меандр » , і проводять виділення певної гармоніки за допомогою налаштованого на неї фільтра . даний метод зручний при не великих ступінях помноження , використовують різні модулі з різними коефіцієнтами помноження .
Для помноження гармонічного сигналу можна використати двох півперіодний випрямляч , який має коефіцієнт помноження рівний 2 .
Непрямі методи
дозволяють помножувати сигнал з будь-якою кратністю , обмеження висувається на елементну базу і на швидкодію . на деякій частоті використовується частотний або фазовий або фазочастотний детектор , таким детектором являється гетеродин на варикапі , частота якого керується автоматично із виходу детектора і автоматично підстроюється під вихідну частоту , яка завідомо більша (менша) у встановлену кількість раз .
Встановлення робочої точки задає бар’єрну ємність , і тим самим встановлює робочу частоту гетеродина .Якщо частота гетеродина змінилась відносно частоти кварцового генератора – виникає від’ємна напруга - яка подається на варикап . Сбар ↓ → fгетерод ↑
 , і навпаки , якщо частота генератора буде рости , відповідно і напруга буде падати (ставати більш додатною ) тоді відповідно буде збільшуватись бар’єрна ємність . Любе відхилення частоти призводить до автоматичної підстройки частоти гетеродина. , і навпаки , якщо частота генератора буде рости , відповідно і напруга буде падати (ставати більш додатною ) тоді відповідно буде збільшуватись бар’єрна ємність . Любе відхилення частоти призводить до автоматичної підстройки частоти гетеродина.
Схема фазочастотного детектора : (також ця схема являє собою структурна схему синтезатора частот , який випускається у вигляді єдиної ІС)
Артём Федяй
19.Метод дискретного гетеродинного перетворення частот в цифрових частотомірах. Структурна схема і робота НВЧ частотоміра.
Цифрові частотоміри – це універсальні прилади, за допомогою яких можна виміряти:
- частоту сигналу;
- період сигналу;
- відношення двох частот;
- тривалість фронтів;
- тривалість імпульсів;
- інтервал між двома імпульсами;
- відхилення частоти від оптимального значення.
Принцип роботи цифрових частотомірів:
d. Із сигналу, частоту якого треба виміряти, формуються короткі відлікові імпульси.
e. Формується високостабільний інтервал відліку.
f. Підраховуються відлікові імпульси протягом інтервалу відліку.
Зауваження до п.2: щоб інтервал відліку був високостабільним, необхідно формувати його за допомогою кварцового генератора. До всього кварцовий генератор повинен мати ще й температурну стабілізацію.
Для вимірювання частот в НВЧ діапазоні використовують супергетеродинний метод, який дозволяє перенести спектр частот із вихідного і необхідний спектр.
Суть супергетеродинного методу полягає в помноженні двох напруг у помножувачі (модуляторі). На відміну від лінійних операцій з сигналами різної частоти, помноження, тобто нелінійна операція, дозволяє синтезувати частоти, величини яких відрізняються від вихідної.
Приведемо математичне обґрунтування вищесказаного.
Нехай, маємо два сигнали напруги:
 ; (19.1) ; (19.1)
 . (19.2) . (19.2)
З елементарних математичних міркувань:
 (19.3) (19.3)
Покажемо, як розміщуються сигнали U1
, U2
, U1
×U2
в частотному діапазоні, якщо прийняти, що f1
=fгет
, f2
=fсигн
:
Рис. 19.1.
Розміщення частот на спектральній характеристиці при гетеродинному перетворенні.
Змішування двох частот і виділення їх різниці відбувається на будь-якому нелінійному елементі (діоді, транзисторі, нелінійному опорі і т. д.) в НЧ фільтрі. Смуга пропускання НЧ-фільтра, який би після змішування залишав в спектрі вихідного сигналу лише меншу з утворених частот (
f
гет
-
f
сигн
) показано на рис. 19.1 пунктирною лінією.
Для прикладу покажемо, як можна реалізувати перенесення спектру сигналу в НЧ область з більш високочастотної, використовуючи як нелінійний елемент діод.
Для спрощення будемо вважати, що струм діоду при прямому зміщенні є квадратичною функцією від напруги. Тоді якщо напруга на діоді є сумою напруг
U
1
та
U
2
, що змінюються в часі так, як вказано в (19.1) і (19.2), струм діода, що знаходиться під напругою
U
Д
=
U
1
+
U
2
, буде описуватись наступною функцією:
 Тут, на відміну від (19.3) спектр вихідного сигналу струму містить чотири дискретні значення частот: частоту гетеродину (
f
1
) та сигналу (
f
2
), а також суму(
f
1
+
f
2
) і різницю цих частот (
f
1
-
f
2
). Тут, на відміну від (19.3) спектр вихідного сигналу струму містить чотири дискретні значення частот: частоту гетеродину (
f
1
) та сигналу (
f
2
), а також суму(
f
1
+
f
2
) і різницю цих частот (
f
1
-
f
2
).
Структурна схема реалізації вимірювання частоти ВЧ сигналу методом дискретного гетеродинного перетворення:
Зауважимо, що супергетеродинні методи перенесення спектру частот бувають двох типів:
1.
Дискретного гетеродинного перетворення. В цьому випадку частота гетеродина дискретна і кратна частоті кварцового генератора.
2.
Метод гетеродинного перенесення спектр частот, коли частота гетеродина змінюється плавно автоматично так, щоб різниця між вхідною частотою і частотою гетеродина дорівнювала
f
0
.
Рис.19.2.
Структурна схема частотоміра, що працює за принципом на гетеродинного перетворення
 - в цій формулі є неоднозначність (+/-). Щоб її виключити, необхідно провести вимірювання на
n та
n±1 гармоніці (3 вимірювання). Вибираємо, на якій частоті співпадає. Це є недоліком цього методу. - в цій формулі є неоднозначність (+/-). Щоб її виключити, необхідно провести вимірювання на
n та
n±1 гармоніці (3 вимірювання). Вибираємо, на якій частоті співпадає. Це є недоліком цього методу.
20. Метод гетеродинного перенесення частот. Структурна схема і робота НВЧ частотоміра.
Зауважимо, що супергетеродинні методи перенесення спектру частот бувають двох типів:
3.
Дискретного гетеродинного перетворення. В цьому випадку частота гетеродина дискретна і кратна частоті кварцового генератора.
4.
Метод гетеродинного перенесення спектр частот, коли частота гетеродина змінюється плавно автоматично так, щоб різниця між вхідною частотою і частотою гетеродина дорівнювала
f
0
.
Гетеродин може змінювати свою частоту неперервно і автоматично відслідковувати
fx
, але так, щоб різниця між
fx
і
n
-ною гармонікою гетеродину дорівнюватиме частоті кварцового генератора,
f
0
:

Сигнали на виході інтегратора, які керують частотою гетеродина, будуть відмінні від нуля тільки при перехідних процесах при автоматичній настройці гетеродина.
Недолі той же самий, як і в методі дискретного гетеродинного перетворення: неоднозначність гармоніки, треба робити три вимірювання (два, які співпали, будуть відповідати результату).
21. Прилади і методи для вимірювання малих величин інтервалу часу.
Частотоміри використовуються як вимірювачі інтервалу часу, але при зменшенні інтервалу часу потрібно збільшувати точність приладу і використовувати методи масштабно-часового перетворення. Масштабно-часові перетворювачі дозволяють виміряти піко- і наносекундні інтервали за допомогою звичайних частотомірів.
Точність вимірювання інтервалів часу можна підвищити за допомогою трьох методів:
1.
Метод затриманих співпадань.
2.
Ноніусний (вернерний) метод.
3.
Метод статистичних випробувань.
Основна похибка перших двох методів – похибка, обумовлена нестабільністю частоти кварцового генератора
d
0
, шумами:
d
ш
. Найбільш суттєва похибка дискретизації:  . .
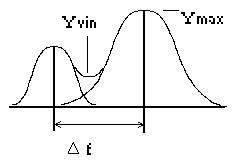
Зауваження до рис.:  - це похибки, обумовлені неспівпаданням імпульсів кварцового генератора і початку та кінця сигналу. Жодного відношення до тривалості передніх і задніх фронтів, вказаних на малюнку, вони не мають. Довжина сигналу – інтервал часу, коли сигнал має рівень одиниці. Фронти імпульсів взагалі можна вважати прямокутними. Далі “передній фронт” розуміємо як інтервал часу між початком сигналу (чи переходу сигналу з “0” в “1”) і часом появи першого імпульсу генератора. - це похибки, обумовлені неспівпаданням імпульсів кварцового генератора і початку та кінця сигналу. Жодного відношення до тривалості передніх і задніх фронтів, вказаних на малюнку, вони не мають. Довжина сигналу – інтервал часу, коли сигнал має рівень одиниці. Фронти імпульсів взагалі можна вважати прямокутними. Далі “передній фронт” розуміємо як інтервал часу між початком сигналу (чи переходу сигналу з “0” в “1”) і часом появи першого імпульсу генератора.
Передній фронт зменшуємо до нуля за рахунок “прив’язки” частоти кварцового генератора до строб-імпульсу
Þ
кварцовий генератор починає генерувати імпульси з частотою
f
0
, коли приходить строб-імпульс.
Неспівпадання заднього фронту може бути зменшене, як фактор, що впливає на точність вимірювання, шляхом використання Ноніусного методу. Цей метод дозволяє розбити інтервал T0
на 10 частин і з точністю до 0.1 виміряти неспівпадання з фронтом імпульсу
f
0
.
Якщо імпульси подавати на лінію затримки (ЛЗ), то можна виявити, на якому кінці ЛЗ з’являється імпульс, і генерувати строб-імпульс.
Більше інформації про принципи та реалізацію методів прецизійного вимірювання сигналів малої тривалості можна отримати з опису кожного з них, що приводиться нижче.
22. Підвищення точності вимірювання інтервалу часу методом затриманих співпадань.
Метод дозволяє зменшити похибку в 10-20 разів.
Завдання, що вирішує метод: зменшення похибки неспівпадання імпульсів кварцового генератора зі стоповими імпульсами шляхом затримки імпульсу кварцового генератора на секційній лінії затримці. Перший імпульс кварцового генератора синхронізований зі стартовим імпульсом.
Блок-схема пристрою для вимірювання інтервалу часу методом затриманих співпадань:
На схемі введено позначення: Ci
– і
-тий селектор, Лзі
– і
-та лінія затримки, і
=1..
k
.
Затримка на кожній секції ЛЗ, які затримують імпульси кварцового генератора: T0
/k. Всі селектори (С1
...Сk
) відкриваються імпульсами, що співпадають з фронтом селекторного імпульсу (імпульсом з тригера).
Таким чином, абсолютна похибка зменшується на величину Т0
/k.
Цифровий індикатор має дві шкали: одна показує кількість підрахованих імпульсів від кварцового генератора, а інша –значення інтервалу часу від останнього імпульсу кварцового генератора до кінця сигналу. Зауважимо, що чим більше ЛЗ, тим точніше ми виміряємо цей “залишковий” інтервал.
23. Ноніусний метод підвищення точності вимірювання інтервалу часу.
Метод дозволяє зменшити похибку в 10...100 разів.
Ноніусний генератор генерує імпульси з періодом, що менший за період імпульсів кварцового генератора. Запускається ноніусний генератор стоповим імпульсом. Фіксується момент співпадання імпульсів ноніусного та кварцового генератора. Рахуються кількість імпульсів до спів падання. Вона позначена як nx
. Тоді  . .
Вибір періоду імпульсів ноніусного генератора Тн
береться з умови:
 , ,  . .
 . .
При такому виборі k відносна похибка зменшиться в k разів.
Блок-схема такого частотоміра подана нижче:
Рис. 23.1.
Блок-схема частотоміра, в якому використовується ноніус ний метод.
Блок керування скидає на “0” лічильники та керує формуючими пристроями.
Генератор ноніусних імпульсів запускається (Тн
) запускається стоповим імпульсом, останній також відкриває за допомогою Тригера 2 Селектор 2, і на лічильник проходять ноніусні імпульси. Інтервал часу між ноніус ними імпульсами та імпульсами генератора Т0
з кожним періодом зменшується, і в момент їх співпадання спрацьовує Схема співпадання, що виробляє імпульс скидання, що переводить всю схему в вихідне положення.
24. Метод статистичних випробувань у вимірювачах інтервалу часу.
З високою точністю виміряти інтервали часу від 10 нс до 10 мкс дозволяє метод статистичних випробувань, який ґрунтується на тому, що математичне сподівання деякої величини лінійно пов’язане з параметрами, що вимірюються (інтервал часу). Цей метод придатний тільки для періодичних сигналів.
Часові діаграми, що ілюструють роботу схеми наведені нижче. В схемі формуються високо стабільні квантуючі імпульси. Треба підрахувати, яка кількість квантуючих імпульсів співпала з імпульсом, який треба виміряти.
Ймовірність співпадання квантуючих імпульсів та імпульсів, що формуються:
В формулі: m – кількість імпульсів, які співпали, n – загальна кількість імпульсів.
Якщо вибрати: , де показник степені цілий, то можна проводити безпосередній відлік. , де показник степені цілий, то можна проводити безпосередній відлік.
Для нормальної роботи методу потрібно, щоб:

Чим більше n, тим більша точність.
Блок-схема:
В цій схемі блок керування відкриває ключі.
Величину n можна підібрати. З лічильника n, коли він переповнюється, іде команда на БК.
Виталик Чередий
25.Фазометри, їх типи та використання.
Фазометри -
це пристрої для вимірювання фазового зсуву сигналів.
U
1
=
U
1
max
·
sin
(
ω
1
·
t
+
φ
1
)
;
U2
=
U2max
·
sin
(
ω2
·
t
+
φ2
)
;
∆
φ =( ω
1
- ω2
)t + φ
1
- φ2
∆
φ
– залежить лінійно від часу.
φ
1
-
φ
2
-
початкова різниця фаз.
Частоти повинні бути однаковими: ω
1
=
ω
2,
тоді різниця фаз рівна різниці початкових фаз.
В фазі закладено багато інформації (вимірювання відстані за допомогою лазерних пристроїв, мікрометри (не механічні)).
Приклад(використання фазометрів):
На рухомому механізмі знаходиться лазер. Промінь падає на напівпрозорий матеріал => датчик опорного сигналу = > дзеркало : відбитий сигнал падає на датчик відбитого сигналу => ці сигнали відрізняються за фазою. Цей метод найбільш ефективний для визначення малих відстаней.
Мал. 25.
Структурна схема вимірювача відстані на основі фазометра і лазерного проміня.
26. Осцилографічні методи вимірювання різниці фаз.
При лінійній розгортці (похибка 10%).
ac
/
ab
= ∆φ/360° = > ∆φ = 360°
ac
/
ab
Мал. 26.1.
Осцилографічний метод вимірювання(при лінійній розгортці) .
Вимірювання методом еліпса (кругова розгортка).
На канал X,Y – подаємо 2 сигнали (розгортка нелінійна по X – синусоїдальна).Формуємо зображення: інтерференція двох синусоїд – еліпс.
X = hx
·Uxmax
·sin(ωt)
.
Y = hy
·Uymax
·sin(ωt
+φ
).
(
hx
,
hy
–
чутливість каналів).
Якщо hx
·
Uxmax
=
hy
·
Uymax
,
то на екрані осцилографа сформується еліпс.
∆φ=2·
arctg
(
B
/
A
).
Якщо ∆φ=0° -
пряма, ∆φ=90° -
коло.
Мал. 26.2.
Осцилографічний метод вимірювання(методом еліпса) .
Метод півкола.
Мал. 26.3.
Структурна схема вимірювання методом півкола.
Однопівперіодний випрямляч слугує для формування півкола.
27. Компенсаційний метод вимірювання різниці фаз. Типи фазообертачів та їх параметри.
Компенсаційний метод.
Мал. 27.1.
Структурна схема вимірювання компенсаційним методом.
1. Спочатку виставляємо фазообертач на 0.
2. Подаючи одну й ту саму напругу U
1
=
U
2
, добиваємося ∆φ=0°
на індикаторі (калібруємо).
3. Не змінюючи U
1,
подаємо U
2
– маємо шукану ∆φ.
Відлік проводимо по шкалі каліброваного фазообертача.
Типи фазообертачів.
1. Т – подібний (НЧ фазообертач).
∆φ=
arctg
(1/ω·С·
R
).
C
1=
C
2=
C
.
Мал. 27.2.
Схема Т подібного фазообертача.
2. (НЧ фазообертач).
С1=С2=С
R
1=
R
2=
R
∆φ=2·
arctg
(ω
·
С
·
R
).
Мал. 27.3.
Схема НЧ фазообертача.
Є залежність від частоти.
3.
(НЧ фазообертач).
Діапазон близький до 180°.Більше не можна, бо С
має кінцевий номінал.
10° ≤ ∆φ ≤ 160°.
R
1=
R
2=
R
3
∆φ=2·
arctg
(ω·С·
R
).
Мал. 27.4.
Схема НЧ фазообертача.
4. НВЧ фазообертач.
Використовують фазообертачі
- тромбонного типу.
- діелектричні ФО.
- полярізіційні ФО.
28. Фазометри з перетворенням різниці фаз в напругу.
а) Фазометр з фазовим детектором.
R
1=
R
2
R
3=
R
4
Ubc
=
U
2
(генератор на варикапі)
U
2 =
R
3-
R
4
Мал. 28.1.
Схема фазообертача с фазовим детектором.
Мал. 28.2.
Характеристика фазообертача с фазовим детектором.
Є діапазон в якому характеристика лінійна.,
b
)
Фазометр з перетвореннм фазового зсуву в часовий інтервал.
U
вх = ∆
t
/
T
·
Umax
.
∆
t
/
T
= ∆φ /360°.
∆φ
= Ucep/Umax =
∆
t
/
T.
∆φ
= U/Umax
·
360°. (Umax
= const, можна прокалібрувати і поставити вольти у відповідність з градусами)
.
∆φ
–
міряємо вольтметром.
Тобто у такому вимірюванні ми перетворюємо різницю фаз в напругу.
Мал. 28.3.
Вихідні характеристики фазометра з перетвореннм фазового зсуву в часовий інтервал.
29. Цифровий фазометр миттєвого значення. Параметри, переваги та недоліки.
Цифрові фазометри.
Використовують:
- перетворення ∆φ в ∆t, а потім точно вимірюють ∆t (як в цифрових електронних частотомірах). Похибка при вимірюванні, визначається похибкою вимірювання інтервалу часу.,
- цифрові фазометри миттєвого відліку - більш оперативні, але мають більшу похибку вимірювання.
- цифровий фазометр з усередненням (середнього значення) – менша оперативність, але менша похибка (нема додаткових вимірювань).
Мал. 29.1.
Вихідні характеристики фазометра миттєвого відліку.
Nx =
∆
t/To.
∆φ
=
∆
t/T ·360° = Nx · To·360° /T;
T
/
To
= 36·10 ±
k
k
= 0,1,2,3,…
Недолік: для кожного Т
шкала буде інша.
Складові похибки:
- за рахунок дискретності δд = 1/
Nx
.
- нестабільність кварцового генератора δо
- δш.
Мал. 29.2.
Структурна схема цифрового фазометра миттєвого відліку
.
30. Цифровий фазометр з усередненням.
Не потрібно вимірювати додатково Т або f. Вимірювання проводиться.
Вимірювання проводиться по М пачках імпульсів Nx. Чим більше М тим точніше вимірювання, але менша оперативність.
М – не довільна. Вибирається виходячи із тривалості циклу вимірювання.
Мал. 30.1
Структурна схема фазометра середнього значення.
t
ц =
k
д · То.
t
ц –
час циклу.
k
д – коефіцієнт ділення.
M
=
t
ц /
T
;
M
=
k
д·То/
T
.
Nx·M = ∆t/To · k
д
·
То
/T.
M·Nx =
∆φ
· k
д
/360°
∆φ
= N
э
·360°/ k
д
, k
д
= 36·10 ±k
k = 0,1,2,3,…
В результаті будемо мати безперервний відлік різниці фаз в кількості імпульсів. Результат вимірювання не залежить від частоти вхідного сигналу.
δш
– менша за рахунок усереднення.
Лена Рябцева
31.Розширення частотного діапазону фазометрів.
Розширення частотного діапазону використовують для зменшення похибки при вимірюванні малих фазових зсувів, тому що воно приводить до збільшення фазового зсуву.
Для вимірювання НВЧ ГГц - діапазону використовуються фазометри з перенесенням спектру частот супергетеродинним методом.
· НВЧ – фазометри з перенесенням спектру частот.

· Якщо частоти дуже низькі і дуже малий зсув фаз, можна помножити вхідні частоти, а потім вимірювати різницю фаз між помноженими частотами. ∆φ'=∆φ*n
Де n – коефіцієнт помноження.
Можна використовувати менш точні фазометри.
32. Вимірювання різниці фаз методом суми та різниці векторів.
В цих приладах ∆φ перетворення в напругу, які вимірюються цифровим або аналоговим методом.




 (тут дуже нелінійна шкала, тому таким способом не користуються) (тут дуже нелінійна шкала, тому таким способом не користуються)
 Підсилювач для розширення діапазону для вимірювача. Підсилювач для розширення діапазону для вимірювача.
Недолік: нелінійність

Це найкращій прилад: абсолютна лінійність шкали.
Діапазон: 0…2π.
Недолік: неоднозначність, одне значення сигналу відповідає двом кутам. Для усунення неоднозначності в один із каналів вводять некалібрований фазообертач і дивимось, якщо при збільшенні φ сигнал зменшується, то це перша точка, якщо збільшується, то друга. Це для додатного сигналу. Для від’ємного навпаки (точки 3,4).
33. Прилади для вимірювання АЧХ. Переваги та недоліки панорамних вимірювачів АЧХ.
АЧХ потрібно вимірювати, щоб побачити спотворення, підсилення та інше.
Методи:
· По точках (не оперативний, може пропустити характерну точку, висока точність);

Недолік:
1. якщо змінити параметр якогось елемента схеми, то потрібно перемірення знову.
2. Пристрій може пропустити характерну точку. Діапазон генератора видає частоту з високою точністю, а вимірювальний прилад вимірює точно, тобто висока точність.
· Панорамний.
Використовує як осцилограф ЕЛТ, на екрані одразу висвічує АЧХ.
Потрібен генератор хитної частоти, який перекриває діапазон нашої схеми. Потрібно, щоб в цьому генераторі частота змінювалась синхронно із розгорткою і щоб зміна була лінійною.
Бажано, щоб амплітуда була постійною на заданих частотах.
Автоматичне регулювання амплітуди (АРА).
34. Робота та складові частини панорамних приладів для вимірювання АЧХ.
Генератор хитної частоти характеризується модуляційною характеристикою. Це залежність частоти від напруги, яку ми подамо на генератор. Бажано, щоб вона була лінійною.
Вимоги до генератора хитної частоти (див. рис. в питанні 33):
1. Потужність його на виході або амплітуда не повинна залежати від частоти: схема автоматичного регулювання амплітуди (АРА).
2. Необхідно, щоб модуляційна характеристика була лінійною: спеціальний блок лінеаризації.
3. Потрібен вузол частотних відміток з різним спектром частот, які треба розмістити на екрані, на характеристиці або на окремій лінії.
Для діапазону частот 100…1000 МГц елементною базою є варікап, який розміщується в коливальному контурі.
Варікап:
Сбар
– ємність зв’язаних носіїв заряду ( при Uзв
).
 ; для плавних переходів; ; для плавних переходів;
 ;для різких переходів; ;для різких переходів;
 . .
Модуляційна характеристика нелінійна. Треба поставити вузол з зворотною не лінійністю ( щоб їх добуток дорівнював 1).
35. Генератори хитної частоти. Методи лінеалізації модуляційних характеристик ГЧХ.
1. Лінеарізатор із зворотною не лінійністю як правило на діодах (неточний). Коефіцієнт перекривання 
Простий, але вимагає кваліфікованого налагодження при заміні варикапа.
!!!!! Для варикапа: в скільки разів зміниться С при зміні Uзв в робочому діапазоні: коефіцієнт перекривання. Досягається шляхом вибору матеріалу.
2. Дуже точний прилад:
Лінеарізатор за допомогою лінії затримки (ЛЗ), змішувача, ФНЧ і частотного детектора. З виходу частотного детектора поступає сигнал автоматичного підсилювача частоти генератора.

На виході частотного детектора (Ч.Д,) сигнал, амплітуда і полярність якого дає різницю частоти від лінійної.
В ряді випадків коли досліджується схеми, в яких смуга частот ∆ƒ≤ƒ°, р
еалізувати панорамний прилад можна за допомогою частотного детектора, напруга з якого подається в канал Х. Відповідає необхідність вузлів лінеаризації модуляційної характеристики.
36. Розширення діапазону частот в панорамних вимірювачах АЧХ. Формування частотних відміток в панорамних приладах.
В панорамних приладах для розширення діапазону частот використовують супергетеродинний метод перенесіння спектру частот (варікап з таким не впорається).
В області високих частот для вимірювальних приладів використовують діод Ганна, розміщуючи його в магнітном поле, яке регулює довжину пробігу носіїв.
Генератори на лампі зворотної хвилі в широкому діапазоні частот.
В оптичному діапазоні: генератори когерентних і некогерентних випромінювань (світлодіоди на гетеро переходах, частота випромінювання залежить від ∆Езз, щоб змінювати використовують прилади на гетеропереходах з плавною зміною ∆Езз).
(В залежності від прикладеною напруги її енергія і де на зміну місця рекомбінації (∆Езз) різні частоти випромінювання.) різні частоти випромінювання.)
Як визначити яка частоту в кожній точці?
Потрібно сітку частот кварцованого генератора прив’язати до нашого генератора хитної частоти.
Чим визначена смуга ФНЧ, тим точніше ці відмітки які відповідають частотам кварцового генератора.
(Смуга частот підсилювача потрібно бути близько до 0.(-5Гц).)
Щоб прив’язати сітку частот генератора до ГЧХ, потрібно зібрати схему, яка використовує супергетеродинний метод перенесення частот.
Структурна схема панорамного приладу.
(З якою точністю прокалібрований атенюатор, з такою точністю ми отримаємо результат.)
Відстань міх частотними відмітками визначається амплітудної напруги.
Максим Бычков
37.Мікропроцесорний панорамний вимірювач АЧХ.
Програма вимірювання АЧХ зашита в ПП. Кожна точка по частоті вимірюється в два етапи.
1) Калібрувати атенюатор.
На встановленій частоті, через інтерфейс виводу -1 поступає код цієї частоти:
через ЦАП – в напругу.
MUX пропускає сигнал з ГХЧ U
г
, цей сигнал вимірюється, перетворюється через АЦП і записується в ОЗП.
2) Частота та ж сама.
Сигнал через атенюатор, схему, MUX проходить і записується в ОЗП. Атенюатор настроюється так, щоб ці дві частоти були близькими, вона знов вимірюється і т.д.
Кожен раз приближаємось ближче. В кінці маємо в ОЗП значення частоти f
і коефіцієнт передачі KU
.
38. Панорамний мікропроцесорний вимірювач АЧХ з синтезатором частот.
Аналогічний МП вимірювач АЧХ із синтезатором частот. Замість (ГХЧ, ЦАП, інтерфейс виводу – 1). Недолік можемо пропустити якусь частоту, в залежності від того, як настроєний синтезатор частот.
На вхід синтезатора частот поступає код частоти.
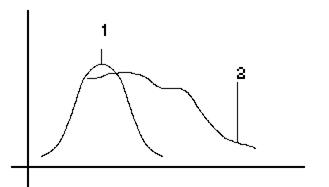
39. Спектроаналізатори паралельного типу для вимірювання спектрів сигналу одиночних імпульсних сигналів.
Спектроаналізатори це прилади для вимірювання спектру сигналу.
Є двох типів: (Паралельного та Послідовного)
Паралельного типу, вимірює спектри одиночних сигналів.
Паралельного типу спектроаналізатори
Аналогові:
1) Сигнал подається одночасно на n фільтрів, и n пристроїв регестрації.
Дискретність спектру визначається кількістю фільтрів, обмежена. Різна добротність фільтрів.
2) Спектроаналізатори паралельного типу – сигнал подається на лінію затримки з лінійною дисперсійною характеристикою. Дисперсійна характеристика – залежність швидкості від частоти.
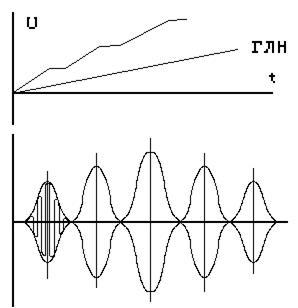
40. Спектроаналізатор послідовного типу. Робота по структурній схемі.
Спектроаналізатор послідовного типу використовують для періодичних сигналів.
Кожна із складових лінійчастого появляється на виході в різні моменти часу.
Ці спектроаналізатори базуються на супергетеродинному методі дослідження сигналу.
На другий вхід змішувача подається подаємо сигнал з ГХЧ.
На вихід змішувача ФПЧ , підсилювача ПЧ
На виході підсилювача ПЧ будемо мати ПЧ з амплітудою відповідно спектральним складовим.
Після детектора
ГХЧ повинен мати постійну потужність, і повинен перекривати спектр сигналу.
Роздільна здатність визначається смугою ППЧ.
41. Параметри спектроаналізаторів послідовного типу і методи підвищення їх роздільної здатності і швидкодії.
Параметри аналізатора:
1) робочий діапазон частот ( визначається діапазоном ГХЧ)
2) чутливість – показує мінімальний сигнал який можна виміряти
3) роздільна здатність.
Роздільна здатність спектроаналізатора визначається смугою частот ППЧ Δƒ ППЧ,
а и швидкістю зміни частоти ГФЧ υг
1-Стат. АЧХ
2-Динамічна АЧХ того самого приладу
Чим більше добротність - тим ДАЧХ ширша
υг =
А*Δƒ ППЧ
Для того щоб була висока роздільна здатність і швидкість розроблені двошвидкісні спектаналізатори.
В першому варіанті
Підвищення роздільної здатності можливо при подвійній або потрійній схемі ПЧ.

ƒпч
=ƒп1
-ƒг
42. Вимірювання не лінійності амплітудних характеристик електронних вузлів та систем. Корекція наскрізних амплітудних характеристик систем.
Вимірювання нелінійних спотворювань. Вони оцінюються по амплітудній характеристиці схеми. Амплітудна характеристика – це залежність вихідного сигналу від вхідного. Вона вимірюється на частоті, яка входить в смугу АЧХ. Може бути і на нульовій і на резонансній частоті.
У відеконі характеристика внутрішнього фотоефекту нелінійна, на кінескопі характеристика нелінійна – тому буде спотворення кольору, якщо зображення кольорове.
Для амплітудної характеристики вводять параметр – коефіцієнт не лінійності  , якщо потрібно лінеоризувати або зробити не лінійною амплітудну характеристику. , якщо потрібно лінеоризувати або зробити не лінійною амплітудну характеристику.
може бути змінним для однієї амплітудної характеристики, може залежати, від U
вх
.
Не лінійність може привести до перетворення гармонічного сигналу в періодичний.
Коля Сливка
43. Коефіцієнт гармонік і нелінійних спотворень. Методи їх вимірювання.
Коефіцієнт гармонік і нелінійних спотворень оцінюються по амплітудній характеристиці схеми. Амплітудна характеристика схеми – це залежність вихідного сигналу від вхідного. Вона вимірюється на частоті, яка входить в смугу АЧХ. Може бути і на нульовій і на резонансній частоті.
У відиконі характеристика внутрішнього фотоефекту нелінійна, на кінескопі – теж буде нелінійна. Тому буде спотворення кольору при кольоровому зображенні.
Для АХ вводять параметр – коефіцієнт нелінійності γ. Він використовується для лінеаризації АХ, або ж для того, щоб зробити її нелінійною.
Параметр γ може бути змінним для однієї АХ, може залежати від  . .
Нелінійність може привести до перетворення гармонічного сигналу в періодичний.
Часто вимірюють коефіцієнт гармонік або коефіцієнт нелінійних спотворень.
Якщо є спектроаналізатор, то коефіцієнт гармонік або коефіцієнт нелінійних спотворень можна розрахувати по результатам вимірювання спектру:
Чим менші спотворення, тим менший коефіцієнт гармонік. В мінімальному випадку  . .
Коефіцієнт нелінійних спотворень:
В знаменнику – ефективна напруга.
Коефіцієнт гармонік та коефіцієнт нелінійних спотворень зв’язані між собою наступним співвідношенням:
Вимірювати коефіцієнт гармонік можна безпосередньо аналоговими та цифровими приладами з використанням режекторного фільтру і двома типами генераторів (генератор гармонічного сигналу та генератор шумів). Якщо використовується генератор гармонічного сигналу, то це метод вимірювання коефіцієнта гармонік на фіксованій частоті. А якщо використовується генератор шумів (а саме білого шуму) – то це буде статистичний метод вимірювання коефіцієнта гармонік.
44. Вимірювання коефіцієнта гармонік на фіксованій частоті.
Для вимірювання коефіцієнта гармонік на фіксованій частоті використовується генератор гармонічного сигналу. В даному випадку є можливість змінювати частоту генератора і вимірювати залежність fг
(або fс
) від частоти. Також в схемі використовується режекторний фільтр. Він може настроюватися на частоту сигналу.
Гармоніки знаходяться за межами режекторного фільтру.
Схема вимірювання коефіцієнта гармонік на фіксованій частоті подана нижче:
Вольтметр вимірює ефективне значення всіх гармонік окрім першої.
Для спрощення вимірювань і виключення необхідності ділення в положенні 2 регулюють коефіцієнт підсилення вхідної схеми так, щоб вольтметр відхилявся на максимальне значення. Не змінюючи коефіцієнт підсилення, вольтметр перемикається у положення 1.
Недоліком цього методу є те, що він працює на одній частоті.
45. Статистичний метод вимірювання коефіцієнта гармонік.
Для вимірювання коефіцієнта гармонік статистичним методом використовується генератор шуму. При цьому сигнал змінюється в широкому ліапазоні (генератор білого шуму). Далі вмикається режекторний фільтр.
Селективний вольтметр вимірює сигнал на частоті fреж
(чисельник виразу для КС
). Звичайний вольтметр вимірює ефективне значеняя шуму (вимірює всу складові – знаменник виразу для КС
).
46. Типи модуляції і методи вимірювання параметрів модульованих сигналів.
Амплітудна модуляція (АМ) - модуляція несучого коливання, при який змінним параметром є амплітуда коливань. Це найпростіша модуляція, яка має найвужчий спектр і не перешкодостійка. Для АМ – коефіцієнт модуляції по амплітуді М.
Частотна модуляція (ЧМ) - кутова модуляція несучого коливання, при якій відхилення частоти модульованого сигналу змінюється пропорційно миттєвим значенням частоти модулювального сигналу. Ця модуляція більш перешкодостійка, але смуга частот значно більша. Для ЧМ – девіація або максимальне відхилення частоти.
Фазова модуляція (ФМ) - кутова модуляція несучого коливання, при якій фаза несучого змінюється пропорційно миттєвим значенням модулювального сигналу. Для ФМ – індекс модуляції.
Існують осцилографічні методи вимірювання параметрів модульованих сигналів. Вони використовуються тоді коли за час вимірювання коефіцієнт модуляції не змінився. Якщо ж він змінюється, то використовують модулометри – для амплітудної модуляції та девіометри – для частотної модуляції.
47. Осцилографічні методи вимірювання коефіцієнта амплітудної модуляції.
Де ω – це несуча частота, Ω – частота модуляції.

1.Вимірювання осцилографом при лінійній розгортці по Х.
Похибка складає 5-10%.
2. Осцилографічний метод з синусоїдальною розгорткою по Х.
Утворимо фігуру Лісажу:
В даному випадку огинаюча – це пряма. Цей метод називається методом трапеції.

Початкові фази між модулюючим та модульованим сигналами співпадають. Якщо ж вони не співпадатимуть, то отримаємо наступне:
Можна визначити нелінійність спотворень: якщо вони є, то огинаюча буде не прямою, а відповідно кривою.
Осцилографічні методи можна використовувати, коли за час вимірювання коефіцієнт модуляції не змінюється.
48. Модулометри та девіометри.
Якщо за час вимірювання коефіцієнт модуляції змінюється, то використовуються модулометри та девіометри.
Принцип роботи модулометра полягає в наступному: сигнал запускається на детектор і визначаємо постійну та змінну складові.

Якщо вимірювати окремо  , то використовується піковий детектор, якщо , то використовується піковий детектор, якщо  , то використовуються діоди, включені в різних напрямках. , то використовуються діоди, включені в різних напрямках.
Реалізацію модулометра можна зобразити наступною блок-схемою:
Аттенюатор змінює частоту так, щоб була зміна постійної складової. Стрілку пікового детектора можна одразу програмувати в коефіцієнті модуляції, щоб не ділити.
Девіометр – це прилад для вимірювання параметрів частотної модуляції.
Щоб перейти від модулометра до девіометра необхідний частотний детектор замість амплітудного. Після підсилювача проміжної частоти потрібно поставити амплітудний обмежувач з двох сторін.
Наташа
Кондратюк
49.Панорамний прилад для вимірювання опору навантаження в НВЧ діапазоні.
Метод 12-ти полюсника, коли використовуються 4 діоди на детекторних голівках і у них є інформація про повний опір навантаження. Детекторні голівки розміщенні через  . Недолік
: невисокий (10%) коеф-т перекривання частоти. . Недолік
: невисокий (10%) коеф-т перекривання частоти.
12 –ти полюсник: 4  = 8 контактів + 2 на вході + 2 на виході. = 8 контактів + 2 на вході + 2 на виході.
На пластину х : 
На пластину у : 
 - чутливість осцилографа - чутливість осцилографа
 - модуль навантаження - модуль навантаження
Якщо подати на х,у ці напруги, то відстань від центру до точки буде рівна  , а кут дає фазову характеристику. , а кут дає фазову характеристику.
Екран осцилографічного приладу.
Прилад може використовуватись в медицині при роботі з біологічними об’єктами.
50. Панорамний прилад для вимірювання коефіцієнта стоячої хвилі.
Якщо відбивання нема – нема стоячої хвилі.
КСВ = 1,

Якщо відбивання є – є стояча хвиля.
В вимірювальній лінії зміщували вузли і пучності, фіксували їх.
 , за умови, що детектор лінійний (з НВЧ діодами) , за умови, що детектор лінійний (з НВЧ діодами)
 , за умови, що детектор квадратичний. , за умови, що детектор квадратичний.
На екрані :
залежність КСХ від частоти (частоту змінюємо резонансним частотоміром)
Недолік:
вузькосмужність 
Більш складніші схеми з направленими розгалужувачами і 6-ма діодами розширюють частотний діапазон.
51. Імпульсний рефлектометр.
Коефіцієнт відбивання 
Відстань, на якій буде неоднорідність:

с – швидкість розповсюдження електромагнітних хвиль;
k – коефіцієнт заповільнення розповсюдження електромагнітних хвиль.
По величині Г можемо оцінити і тип неоднорідності і величину.
Якщо Г = 1, то обрив,
Г = -1, то коротке замикання,
Г > 0, то збільшення опору неоднорідності,
Г < 0, то зменшення опору неоднорідності.
Тобто, якщо знак зберігається зондуючої і відбитої хвилі, то це є збільшення опору в місці неоднорідності.
ЗГ дає імпульси певної тривалості. Чим коротше, тим точніше. Чим на більшу відстань ми розраховуємо, тим більше період ЗГ.
52. Панорамний прилад для вимірювання комплексних коефіцієнтів передачі НВЧ компонент та S-параметрів матриці розсіювання.
Хвильова матриця розсіювання:
 | (узгодження навантаження на виході, U4
=0) – коеф-т відбивання входу 4х
-ка. | (узгодження навантаження на виході, U4
=0) – коеф-т відбивання входу 4х
-ка.
 | (U1
=0) – коеф-т відбивання при передачі з боку генератора. | (U1
=0) – коеф-т відбивання при передачі з боку генератора.
 | (U4
=0) – коеф-т передачі в прямому напрямку з входу на вихід. | (U4
=0) – коеф-т передачі в прямому напрямку з входу на вихід.
 | (U1
=0) – коеф-т передачі в зворотньому напрямку з виходу на вхід. | (U1
=0) – коеф-т передачі в зворотньому напрямку з виходу на вхід.
Існує два напрямки розгалуження: подають, або пряму або відбиту хвилю.
Постійно fгет
– fфаз
= 100 кГц
На Y2
подаємо сигнал з фазового детектора.
53. Типи цифрових вольтметрів і мультиметрів на їх основі.
Використовуються як вольтметри і є основою цифрових мультиметрів для вимірювання U, I, R, C, L.
Основою всіх вольтметрів є виміряння зміни постійної напруги (її випрямлення) або імпульсу напруги за допомогою пікового детектора:
“ + ” – конденсатор швидко заряжаться до Umax
.
Імпульсна напруга перетворюється в постійну і вимірюється постійна напруга.
По принципу роботи є 3три типи цифрових вольтметрів:
1) Найбільш сучасні використовують перетворення постійної напруги в цифровий код за допомогою ЦАП і виведення на індикатор LCD або семи-сегментний індикатор. ЦАП використовують в залежності від швидкодії і точності.
2) Цифровий вольтметр з частотним перетворенням.
Використовують перетворення напруги в частоту з подальшим вимірюванням частоти цифровим частотоміром. Щоб перетворити напругу в частоту використовують інтегратор: на його вхід подають постійну напругу; на виході

3) Вольтметри постійної напруги, які використовують перетворення напруги на пропорційний інтервал часу, а далі він вимірюється як в електронних частотомірах.
54. Цифрові вольтметри прямого відліку.
Принцип роботи полягає в перетворенні вимірюваної напруги Ux
в пропорційний інтервал часу ∆Т, вимірюваний числом N імпульсів, які його заповняють з стабільною частотою слідування.
Вольтметр працює циклами, тривалість яких Т встановлюється за допомогою управляючого пристрою УП.
Цифровий вольтметр прямого відліку.
Похибка вимірювання внаслідок не лінійності зміни напруги, нестабільності порогу спрацьованих порівняльних пристроїв і можливості втрати лічильного імпульсу, тобто похибки дискретності. Основна похибка дорівнює приблизно 0,1%.
Завадостійкість низька, так як люба завада визиває зміну моменту спрацювання порівняльного пристрою. Головною перевагою є їх простота.
Женя Карплюк
55.Цифрові вольтметри з подвійним інтегруванням.
Відрізняються високою перешкодостійкістю. Для цього необхідно, щоб час вимірювання був кратний частоті наводки.
Принцип роботи:
Вимірювання відбувається в 2 етапи.
1. Аналоговий інтегратор спочатку приєднується до вимірювальної величини на час вимірювання. Попередньо інтегратор був заряджений до величини еталонної напруги.
2. Аналоговий інтегратор перемикається на еталонну напругу (від’єднується від вхідної величини). Цей інтервал часу вимірюємо.
Ux ~ t3
– t2
, Nx ~ Ux
Незалежно від фази наводки і початку інтегрування Ux наводка не впливає на результат перетворення.
1 стан
2 стан

t = t3
:  
Можна реалізувати метод прямого відліку.
56. Цифрові вольтметри з цифровим інтегруванням.
Працює як фазометр середнього значення.
Інша назва – цифровий вольтметр із цифровим усередненням.
Похибки:
g. δш
– нестабільність кварцованого генератора
h.  – похибка зумовлена дискретністю відлікових імпульсів по часу – похибка зумовлена дискретністю відлікових імпульсів по часу
i. δш
– похибка зумовлена наявність шумів на вході (випадкова складова часу спрацювання компаратора)
Результат видається після підрахунку m пачок із Nx імпульсів.
За рахунок усереднення δш
зменшується.
Відрізняється від цифрового вольтметра миттєвого значення наявністю це одного селектора, який відкривається з блоку керування (БК) на інтервал часу в m разів більше ніж Tв.
57. Цифрові осцилографи.
Структурна блок-схема цифрового осциллографа:
Вхідний пристрій використовується для узгодження вхідного діапазону АЦП і сигналу.
58. Режими роботи, використання і особливості багатоканальних та багатопроменевих аналогових осцилографів.
Багатопроменеві осцилографи складаються з кількох вхідних пристроїв (підсилювачів) та багатопроменевої електронно-променевої трубки.
Осцилографів з кількістю каналів більше 8 не випускають. Якщо необхідна велика кількість каналів, то сигнали від входів комутують, тобто сигнали відтворюються на електронно-променевій трубці аналогового осцилографа почергово.
Існує два режими комутації:
j. З частотою розгортки по X комутують канали. Використовують при малих періодах вхідних сигналів.
Позначення на органах керування осцилографа: – – Y1, Y2
k. Режим комутації з високою частотою (набагато більшу за частоту розгортки по X)
Позначення на органах керування осцилографа: ······· Y1, Y2
Структурна схема таких осцилографів відрізняється тим, що є електронний комутатор і декілька вхідних пристроїв.
Часто багато канальні осцилографи дозволяють спостерігати сигнали Y1 + Y2 і Y1 - Y2. Це дуже широко використовується для налагодження слідкуючих систем.
Є осцилографи з двома розгортками: затримувана та затримуюча. Вони дозволяють більш детально дослідити сигнал на вибраному проміжку часу від початку розгортки.
В осцилографах з вибором телевізійного рядка за рахунок плавного регулювання запуску швидкої розгортки можна спостерігати відео сигнал окремого рядка.
Якщо необхідно дискретно виділити той чи інший рядок, то використовують лічильник, який підраховує кількість рядків, скидається КСІ (кадровим синхроімпульсом). Далі код лічильника подається на схему співпадання.
59. Типи шумів, їх вплив на параметри конгровимірювальних приладів, корисне використання шумів.
Шуми – це не детерміновані сигнали, тобто такі сигнали як не можна однозначно описати математичною функцією. Вони описуються усередненими статистичними параметрами.
Відхилення від середнього значення може бути й детермінованим – наводка. Їх зменшють методом екранування.
Не детерміновані флуктуації – шуми. Відхилення величин від свого середнього значення.
Шуми двох типів:
1. Технічні шуми
(флікерні шуми – шуми миготіння у барієвих катодах, флікерні шуми в напівпровідниках типу 1/f, обумовлені різними повльними процесами на поверхні напівпровідника)
Шуми в напівпровідниках типу 1/f виникають і при тунельному ефекті.
Ці шуми можна зменшити за рахунок вакууму, не залежать від температури, залежать від тиску газів.
10-3
Гц до 103
кГц
Контактні шуми – виникають за рахунок іскріння контактів.
2. Природні шуми
З ними не можливо боротися, але можна створити умови для їх зменшення.
Тепловий шум. Існує завжди не залежно від того чи прикладена напруга чи ні. Є універсальним. Залежить від опору і температури.
Дробовий шум. Обумовлений дискретністю переносу заряду та енергії. Дробові шуми існують, коли прикладена напруга.
Випадковий характер емісії з катода (випадковий характер інжекції в напівпровіднику).
Генераційно-рекомбінаційні шуми. Обумовлені випадковим характером енерації та рекомбінації носіїв зарядів.
Шумова спектроскопія – приклад корисного використання генераційно-рекомбінаційних шумів. За допомогою шумової спектроскопії можна дізнатися про структуру твердого тіла.
Дифузійні шуми. Обумовлені випадковим характером дифузійної довжини.
Шуми лавинного помноження. Обумовлені випадковими процесами при ударній іонізації (утворенні лавини). Характеристики шумів лавинного помноження такі ж як і для дробового шуму, але параметри шуму більші в n3
разів, де n – коефіцієнт помноження лавини.
Фотонні шуми. Обумовлені дискретністю потоку фотонів.
На практиці сукупність шумів замінюють шумом з ефективним значенням:
Часто сумарний шум прирівнюють до теплового.
Основний параметр – відношення сигнал/шум:

Шуми обмежують чутливість, роздільну здатність, динамічний діапазон приладів.
Шуми корисно використовуються в ряді приладів. Можна визначити зонну діаграму напівпровідника. Шуми використовують для оцінки надійності електронних компонент. Генератори шумів дозволяють вимірювати інтегральні (по частоті) характеристики схем та приладів.
60. Характеристики та параметри шумів (не детермінованих сигналів) і їх вимірювання.
Шуми можна спостерігати по окремим реалізаціям. Сукупність реалізацій – ансамбль реалізацій. Параметри вводяться для характеристики ансамблю реалізацій.
Функція розподілу густини ймовірності:

Математичне сподівання:
Ефективне значення:
Функція кореляції по ансамблю реалізацій.
Можна знайти двомірний розподіл густини ймовірності: 

Можна знайти енергетичний спектр (теорема Вінера-Хінчіна).
В загальному випадку всі ці функції можуть залежати від часу, тоді такі процеси (шуми) називають нестаціонарними.
Стаціонарні шуми. Функція кореляції залежить лише від проміжку час між τ = t2
– t1
, а не від самих значень t1
і t2
.
 , τ = t2
– t1 , τ = t2
– t1
Стаціонарні процеси бувають ергодичними й не ергодичними. Для ергодичних роцессів параметри для ансамблю реалізацій можна розрахувати по єдиній реалізацій.
Чим більше тривалість реалізації тим точніше можна визначити характеристики.
Математично власність ергодичності можна встановити по функції кореляції:

Для інженерних розрахунків беруть час реалізації більший за час кореляції.
Ефективне значення змінної складової:  . .
 ; якщо U
0
= 0, то ; якщо U
0
= 0, то 
Енергетичний спектр – це розподіл густини потужності шуму по частотному діапазону.
  ; ;  
Фізичний енергетичний спектр (ω > 0).
Математичний спектр 
Параметри шумів можна розраховувати по наведеним вище формулам.
За допомогою аналогових приладів вимірюють математичне сподівання як постійну складову. (U
0
за допомогою осцилографа).
Ефективне значення можна виміряти ватметром, покази якого не залежать від форми сигналу (термоелектрична, калориметрична системи).
Дисперсію можна вимірювати як потужність змінної складової шуму на опорі 1 Ом.
Для вимірювання функції кореляції використовують аналогові корелятори:
Ефективно корелятори використовують для виділення періодичного сигналу із шуму, коли суміш сигналу і шуму адитивна.
Функція кореляції від гармонічного сигналу є косинусоїда.
Прилад для вимірювання енергетичного спектра реалізується на основі ватметра і резонансного фільтра, який перестроюється в широкому діапазоні. Такий фільтр реалізується за допомогою супергетеродинного метода.
Юля Бондаренко
61.Генератори шумів. Робота, структурна схема, особливості для різних діапазонів частот.
Генератори шумів
Є аналогові генератори шумів, цифрові і цифрові із аналоговим датчиком шуму на вході.
Цифрові шуми є двох рівнів: „0” та „1”, амплітуда постійна, а момент появи – випадковий.
Найбільш поширені – генератори білого шуму, в якого енергетичний спектр рівномірний у заданій смузі частот.
Параметри генераторів:
1 – рівномірність і стабільність від зовнішніх параметрів;
2 – потужність вихідного шуму;
3 – можливість змінювати смугу частот.
Дуже часто в генераторах шуму використовують супергетеродинний метод для перенесення смуги частот.
Структурна схема аналогового генератора:
· Смуговий фільтр призначений для зміни смуги частот.
· Атенюатор калібрований (в децибелах).
· Блок керування регулює інтенсивність шумів по джерелу або по підсилювачу.
Ефективне значення потрібно вимірювати приладами, які не реагують на форму сигнала (наприклад, термопара : шум нагріває опір; калориметричніприлади : нагрів води) – ці методи неоперативні, але точні. Функція розподілу шуму може змінюватись.
Піковий детектор вимірює пікове значення, а потім градуює ефективне.
Цифрові генератори з аналоговим джерелом шуму
.
 Включають джерело шуму і формувач коротких імпульсів (тригер Шмітта). Включають джерело шуму і формувач коротких імпульсів (тригер Шмітта).
Джерело аналогового шуму дає такий сигнал:
В моменти, коли напруга шуму досяга порогового значення спрацьовує тригер Шмітта, і формуються короткі імпульси. Момент іх появи випадковий.
Окрім цього формують цифрові генератори шуму на основі псевдовипадкової послідовності (ПВП) –
імпульсів. Це логічні „0” або „1”.
Найчастіше використовують ПВП-генератори на основіцифрового регістру зсуву з відповідним зворотнім зв’язком. Послідовність імпульсів періодична. Період повторення підбирають таким, щоб з’явилась ПВП імпульсів:
 . Тактові імпульси з періодом . Тактові імпульси з періодом  подаються на регістр зсуву. k – кількість розрядів регістра, що ввімкнені. подаються на регістр зсуву. k – кількість розрядів регістра, що ввімкнені.
Схема з’єднання розрядів і їх початковий стан визначають порядок повторення „0” або „1”. Чим більша кількість розрядів в регістрі, тим менше ПВП будуть відрізнятись від випадкової послідовності.
Генератор шуму на основі газорозрядної трубки в хвилеводі:
 Використовується для калібрування по чутливості різних трактів приймальних систем, для вимірювання коефіцієнта шуму, для встановлення перешкод. Використовується для калібрування по чутливості різних трактів приймальних систем, для вимірювання коефіцієнта шуму, для встановлення перешкод.
62. Використання аналогових та цифрових кореляторів для виділення періодичних сигналів із шумів (адитивної суміші).
Для виділення сигналу з шуму ефективно використовуються цифрові та аналогові корелятори,
коли шум в багато разів перевищує сигнал. Потрібно щоб:
- сгнал був періодичним;
- суміш сигналу з шумом була адитивною, а не мультиплікативною.
Якщо ввести адитивну суміш сигналу та шуму на корелятор, то функція кореляції зменшується. Для періодичного гармонічного сигналу функція кореляції є косинусоїдою тої самої частоти, що й вхідний сигнал:
 Якщо вибрати велике значення τ, то R(τ) Якщо вибрати велике значення τ, то R(τ)  спаде до такого малого значення, що можна буде виділити R(τ) спаде до такого малого значення, що можна буде виділити R(τ) . .
Якщо сигнал не гармонічний, а періодичний, його розкладають на гармоніки, а для кожної гармоніки R(τ) є косинусоїдою.
63. Вимірювання енергетичного спектра шумів. Зв'язок енергетичного спектра з функцією кореляції.
Використовують вузькосмужний фільтр, що охоплює весь діапазон частот. На вузьких відрізках Δω вимірюють потужність і ділять виміряне значення на величину опору R. Прилад для вимірювання енергетичного спектру реалізується на основі ваттметра і вузькосмужного (резонансного) фільтра. Щоб фільтр був розрахований на весь діапазон, використовують супергетеродинний метод , перед цим вимірюючи сигнал на проміжній частоті.
Структурна схема:

В 99.9 % випадків енергетичний спектр в електроніці вимірюється не в Вт/(рад/с), а в
В / (рад/с), або в В/ Гц , А/ (рад/с), А/ Гц. / (рад/с), або в В/ Гц , А/ (рад/с), А/ Гц.
Використовують формули Вінера-Хінчіна
:
(в показниковій формі)
(в тригонометричній формі)

Для білого шуму в обмеженій смузі частот функція кореляції має вигляд sin(x)/x, чим більше
ω смуги частот білого шуму, переходи через 0 функції кореляції наближуються до 0, а величина по координаті R(τ) зростає. Якщо ω прямує до нескінченості, то шум є δ-корельований шум,
функція кореляції якого – це δ-функція. смуги частот білого шуму, переходи через 0 функції кореляції наближуються до 0, а величина по координаті R(τ) зростає. Якщо ω прямує до нескінченості, то шум є δ-корельований шум,
функція кореляції якого – це δ-функція.
Якщо Δω більша за середню (центральну) частоту :  , то шум широкосмужний
, навпаки – вузькосмужний.
Кореляційна функція для вузькосмужного шуму – косинусоїда з частотою , то шум широкосмужний
, навпаки – вузькосмужний.
Кореляційна функція для вузькосмужного шуму – косинусоїда з частотою  і огинаючою sin(x)/x. і огинаючою sin(x)/x.
Приклад для шуму з гаусівським енергетичним спектром:
На наступному малюнку :
І – приклад для широкосмужного гаусівського шуму;
ІІ – для вузькосмужного.
Функція кореляції для детермінованих сигналів:
 - завжди. - завжди.
Для одиничних імпульсів:
За наявності декількох імпульсів, що повторюються через величину τ , кореляційна функція такої імпульсної послідовності зсувається на величину τ, симетрично по обидва боки від вісі ординат, та зменшує амплітуду в стільки разів, скільки є імпульсів:
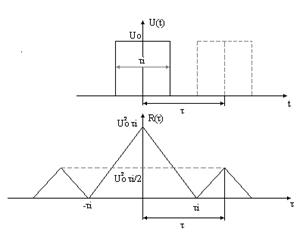
Найпоширеніша в природі функція кореляції – експоненціальна (наприклад, процес генерації та рекомбінації носіїв):

  >0 – коефіцієнт спадання. []=1/с=Гц. >0 – коефіцієнт спадання. []=1/с=Гц.
Чим більше , тим скоріше спадання.
τ = 1/
2 > 1
Для математичного енергетичного спектра:


Математичний енергетичний спектр спадає:
Якщо його пронормувати:
Якщо покласти =1, то можна визначити смугу частот по частоті енергетичного спектру. Чим більший спектр, тим швидше процеси, тим функція кореляції буде падати швидше.
В діапазоні частот від 0 до 0.1енергетичний спектр можна вважати рівномірним з похибкою, не більшою за 1%.
Якщо відомий G(ω),то можна знайти ефективне значення шуму, яке дорівнює площі під кривою G(ω). Якщо відомий G(ω) на вході схеми, то енергетичний спектр будь-якої схеми на виході: 
Для знаходження ефективного значення шуму треба знати енергетичний спектр кожної складової шуму: . .
Тепловий шум.
Наведений струм  залежить від швидкості, тому й шум залежить від швидкості. залежить від швидкості, тому й шум залежить від швидкості.
Швидкість випадкова по амплітуді, по довжині вільного пробігу (по часу).
1) Розглянемо поздовжну швидкість v для окремого електрона. Знаходимо функцію кореляції, усереднюємо по амплітуді. для окремого електрона. Знаходимо функцію кореляції, усереднюємо по амплітуді.
 виражаємо v. виражаємо v.
2) Після усереднення функція кореляції для одного електрона і для одного зіткнення в одиницю часу буде мати вигляд:
 , де m – маса електронів, No – кількість зіткнень в одиницю часу. , де m – маса електронів, No – кількість зіткнень в одиницю часу.
3) Шукаємо функцію кореляції для струму:
 . (М – кількість електронів) . (М – кількість електронів)
4) Шукаємо функцію кореляції для напруги: для цього множимо R (τ) на r (опір). (τ) на r (опір).
Тоді для теплового шуму енергетичний спектр такий:
G(ω) до 50% падає на частоті  . Якщо врахувати, що . Якщо врахувати, що  , то в діапазоні , то в діапазоні  тепловий шум можна вважати рівномірним (білим) з точністю не гірше 1%. тепловий шум можна вважати рівномірним (білим) з точністю не гірше 1%.
Формула Найквіста: (
 ГГц) ГГц)

Це ефективне значення шуму на активному опорі.
Замінюємо в схемі:
Для реактивного опору:
на реактивних елементах тепловий шум не виникає.
Доведемо, що якщо виділяється тепловий шум на реактивному елементі, то це - абсурд.
 Повинна виконуватись умова термодинамічної рівноваги. Якщо закоротити джерело Uеф.ш1=0, то в опорі r з’являється тепло за рахунок енергії шуму на конденсаторі. Тоді різниця фаз: Повинна виконуватись умова термодинамічної рівноваги. Якщо закоротити джерело Uеф.ш1=0, то в опорі r з’являється тепло за рахунок енергії шуму на конденсаторі. Тоді різниця фаз:  °, в такому випадку теплова потужність Ртепл.>0. °, в такому випадку теплова потужність Ртепл.>0.
Якщо так само буде нагріватись конденсатор при Uеф.ш.2=0: і
с , Δφ
=90°, в такому випадку теплова потужність Ртепл.=0. Це означає, що Uеф.ш.2 - не існує, тобто не існує теплового шуму на конденсаторі. , Δφ
=90°, в такому випадку теплова потужність Ртепл.=0. Це означає, що Uеф.ш.2 - не існує, тобто не існує теплового шуму на конденсаторі.
Так само розглянемо два активних опори:
 Розрахуємо потужність, що передається з r1 до r2: Розрахуємо потужність, що передається з r1 до r2:
Потужність, що передається з r2 до r1:
Бачимо, що ці потужності рівні, тобто виконується умова балансу потужностей (термодинамічна рівновага). Максимальна потужність буде, коли r1 = r2.
Це потужність шумів на узгодженому навантаженні:
Реактивні опори змінюють ефективне значення шуму. Чисто активного опору не існує.
Через енергетичний спектр розрахуємо ефективне значення шуму, підставляючи в формулу дійсну частину комплексного опору Z.
Ефективне значення шуму на паралельному з’єднанні:

 - тобто, залежить тільки від ємності. - тобто, залежить тільки від ємності.
 - енергія шуму на конденсаторі від ємності не залежить. - енергія шуму на конденсаторі від ємності не залежить.
Дуже подібні до теплових шумів генераційно-рекомбінаційні, дифузійні шуми  , та інші, в яких функція кореляції експоненціальна.
, та інші, в яких функція кореляції експоненціальна.
Генераційно-рекомбінаційний шум.
 
τ 0 - час життя інжектованих носіїв заряду.
Спектр генераційно-рекомбінаційного шуму залежить від часу життя і займає діапазон в сотні МГц.
Дробові шуми. Шуми лавинного помноження.

Електрони рухаються рівноприскоренно і кожен з них наводить струм при проходженні від катоду до аноду.
tа
– час прольоту.
Ці трикутники на графіку мають нерівномірний, випадковий характер.
Шум обумовлений дискретністю носіїв заряду та випадковим характером їх емісії. Постійна складова анодного струму:
 . .
Дробовий шум – це різниця між наведеним струмом і постійною складовою.
Енергетичний спектр знаходимо як усереднення від квадрату спектральної густини амплітуди такого трикутного імпульсу.
 , де Θ – кут прольоту. , де Θ – кут прольоту.
 Θ=ωtпрольоту tпрольоту=tа – час прольоту від катода до анода. Θ – це не геометричний кут, а зміна фази ВЧ-коливання на аноді за час прольоту від катода до анода. Для НЧ електроніки Θ=0. Θ=ωtпрольоту tпрольоту=tа – час прольоту від катода до анода. Θ – це не геометричний кут, а зміна фази ВЧ-коливання на аноді за час прольоту від катода до анода. Для НЧ електроніки Θ=0.
Якщо електрони потрапляють на анод, коли на ньому від’ємна півхвиля, то вони максимально віддають енергію.
Для умови, коли  енергетичний спектр можна вважати рівномірним. Він залежить від потенціалу між катодом та анодом і відстані між ними d. енергетичний спектр можна вважати рівномірним. Він залежить від потенціалу між катодом та анодом і відстані між ними d.
Широкосмужність дробових шумів залежить від tпр. В режимі об’ємного заряду ефективне значення шуму зменшується. Об’ємний заряд частково екранує шум. Функція кореляції буде більш плавною за наявності об’ємного заряду, тому енергетичний спектр буде більш вузькосмужним.
Енергетичний спектр можна вважати рівномірним в діапазоні 
 - це формула Шоткі для рівномірного енергетичного спектру. - це формула Шоткі для рівномірного енергетичного спектру.

Щоб врахувати об’ємний заряд вводять коефіцієнт депресії,
він менше 1 і залежить від величини об’ємного заряду.
Напруга дробового шуму виникає на навантаженні:
Дуже подібним є шум струму розподілу
, обумовлений випадковим характером попадання електронів на різні електроди, а також дискретністю носіїв заряду. Розраховується аналогічно. Додоаткові шуми струму розподілу вводять в коефіцієнт депресії.
Як і дробові шуми існують шуми лавинного помноження
(газорозрядна трубка; гігагерцовий діапазон). Вони обумовлені випадковістю процесів утворенняносіїв в лавині та дискретністю носіїв заряду. Існують в газорозрядних та напівпровідникових приладах.
Енергетичний спектр шумів лавинного помноження по формі співпадає з енергетичним спектром дробового шуму.
М – коефіцієнт лавинного помноження. Енергетичний спектр шуму лавинного помноження в М разів більший за енергетичний спектр дробового шуму. разів більший за енергетичний спектр дробового шуму.
Діод
використовують як генератор шумів. Змінюючи пряму навантаження, можна змінювати ефективне значення шуму.

Прямій гілці ВАХ діода відповідають дробові шуми, зворотній – шуми лавинного помноження.
В вакуумному діоді
шуми лавинного помноження використовують в діапазоні від 0 до 600МГц на прямій гілці ВАХ в якості генераторів шуму.
 Змінюючи напругу розжарення вакуумного діода при напрузі насичення (коли немає об’ємного заряду), регулюємо ефективне значення шуму. Змінюючи напругу розжарення вакуумного діода при напрузі насичення (коли немає об’ємного заряду), регулюємо ефективне значення шуму.
Теплові шуми
дуже широкосмужні. Залежать від опору і температури.
Фотонні шуми
подібні до дробових шумів. Використовуються в генераторах шуму (Г2-1). Кут прольоту фотонів на 5-6 порядків менший ніж у електронів.
 J(υ) – інтенсивність фотонного шуму. J(υ) – інтенсивність фотонного шуму.
Залежить від температури, при якій випромінюються фотони, або від енергії переходу (лазер).
Фотони описуються статистикою Бозе-Ейнштейна.
Флікерні шуми або шуми 1/
f
.
 Низькочастотні технічні шуми. Щоб їх позбутися в вакуумних приладах використовують не оксидний катод, а катод прямого розжарювання, а в напівпровідникових приладах його неможливо позбутись. Низькочастотні технічні шуми. Щоб їх позбутися в вакуумних приладах використовують не оксидний катод, а катод прямого розжарювання, а в напівпровідникових приладах його неможливо позбутись.

γ=1 для напівпровідників.
Діапазон: від  до до  Гц. На більших частотах флікерні шуми маскуються на фоні теплових. Це є найбільш високочастотна складова процесів старіння приладів. Гц. На більших частотах флікерні шуми маскуються на фоні теплових. Це є найбільш високочастотна складова процесів старіння приладів.
Всі шуми замінюються сумарними – тепловими еквівалентними шумами
або дробовими еквівалентними шумами.

64. Аналогові та цифрові вимірювачі інтегральної ймовірності випадкових сигналів. Ефективне та квазіпікове значення шуму. Пікфактор.
Ефективне значення шуму можна виміряти ваттметром, покази якого не залежать від форми сигналу (термоелектрична система, різні калориметричні методи).
Ефективне значення дорівнює:
Квазіпікове значення шуму Uк.п. вимірюють як середню амплітуду шумової ралізації.
Пікфактор: 
Структурна схема прилада для вимірювання ефективного значення шуму:

 
Нормалізація шумів.
 Якщо електронна система лінійна,
то є шуми на вході і на виході. Якщо на вході нормальний шум, то на виході він такий самий. Якщо на вході шум відрізняється від нормального, то на виході він наближається до нормального тим ближче, чим більше співвідношення смуги частот енергетичного спектру до смуги частот відкопідсилювача. У випадку, коли смуга частот енергетичного спектра в (3...6) разів більша смуги відеопідсилювача, то на виході шуми можна вважати нормальними. В нелінійних
схемах треба розраховувати закон розподілу з урахуванням амплітудної характеристики схеми. Якщо електронна система лінійна,
то є шуми на вході і на виході. Якщо на вході нормальний шум, то на виході він такий самий. Якщо на вході шум відрізняється від нормального, то на виході він наближається до нормального тим ближче, чим більше співвідношення смуги частот енергетичного спектру до смуги частот відкопідсилювача. У випадку, коли смуга частот енергетичного спектра в (3...6) разів більша смуги відеопідсилювача, то на виході шуми можна вважати нормальними. В нелінійних
схемах треба розраховувати закон розподілу з урахуванням амплітудної характеристики схеми.

 
Є ряд приладів, які безпосередньо вимірюють інтегральну ймовірність.
Змінюючи Uпор., знаходять інтегральну ймовірність перевищення за формулою
Щоб визначити диференційну ймовірність
, вибирають 2 значення Uпор. , знаходять їх різницю Δu :
Прилад для вимірювання інтегральної ймовірності.

Прилад для вимірювання диференційної ймовірності.

 Δtі – інтервали часу, де Uпор<U<Uпор+Δu Δtі – інтервали часу, де Uпор<U<Uпор+Δu
65. Аналогові та цифрові вимірювачі густини ймовірності випадкових сигналів.
Важливо виміряти функцію розподілу ймовірності шуму. Найбільш поширена функція густини ймовірності – гаусівська.
 

Аналоговий пристрій для вимірювання густини ймовірності:
Досліджуваний сигнал Х(t) подається на вхідний пристрій ВхП, що узгоджує рівень сигналу відносно наступних вузлів. Амплітудні селектори АС1 та АС2 виділяють сигнали з амплітудою, яка перевищує заданий поріг селекції. Поріг першого селектора дорівнює Х, другого – Х+ΔХ. На виході селектора АС1 получаються прямокутні імпульси U1, тривалістю Δt1i, яка дорівнює інтервалам часу перевищення рівня Х. На виході селектора АС2 получаються прямокутні імпульси U2, тривалістю Δt2i, яка дорівнює інтервалам часу перевищення рівня Х+ΔХ. Формуючі пристрої ФП1 і ФП2 вирівнюють висоту імпульсів. Вихідна напруга ФП1 усереднюється в блоці усереднення БУ та поступає на реєструючий пристрій РП. Отримане значення пропорційне ординаті функції розподілу F(x) на рівні Х.
Для отримання значення ординати щільності ймовірності р(х) обидві послідовності імпульсів U1 та U2 з обох ФП поступають на віднімаючий пристрій ВП, на виході якого з’являються імпульси тривалістю Δt3i= Δt1i- Δt2i. Після усереднення всій суми цих різниць на РП поступає значення, що пропорційне ординаті щільності ймовірності в інтервалі ΔХ.

Цифровий прилад для вимірювання густини ймовірності.
Статистичний аналізатор.
На два вхідні пристрої ВхП1 та ВхП2 подають досліджуваний сигнал. Після цього він подається на входи 1 порівняльних пристроїв ПП1 та ПП2, одночасно на входи 2 цих пристроїв поступають напруги від пристрою встановлення порогу порівняння ВПП на рівні Х та Х+ΔХ. Порівняльні пристрої пропускають напруги реалізації тільки коли відкриваються імпульсами опитування Uоп, які виробляє генератор опитування ГО. Частота цих імпульсів відповідає обраному кроку дискретизації.
Якщо значення реалізації перевищує встановлений рівень Х, то на виході ПП1 з’являються імпульси U1, кількість яких пропорційна часу перевищення. Аналогічно, якщо значення х(t) перевищує встановлений рівень Х+ ΔХ, то на виході ПП2 з’являються імпульси U2, кількість яких пропорційна часу перевищення. Імпульси U1 та U2 в формуючих пристроях ФП1 та ФП2 перетворюються в ідентичні імпульси однакової полярності і поступають в блок віднімання БВ. Коли значення х(t) перевищує Х+ΔХ, то на обидва входи БВ поступають 2 імпульси, вони віднімаються та на вихід БВ проходять імпульси U3 ,які реєструє цифровий частотомер ЦЧ1. Число n підрахованих імпульсів співпадання за інтервал часу Т пропорційне значенню оцінки густини ймовірності на даному рівні Х. Число імпульсів опитування N реєструється за той же час вимірювання Т цифровим частотомером ЦЧ2. Ордината щільності ймовірності
pi(x)=n/( ΔХN).
66. Визначення та вимірювання коефіцієнта шуму електронних систем.
В самому загальному випадку коефіцієнт шуму
– це відношення потужності шумівна виході підсилювача до потужності шумів на виході ідеального підсилювача.

Коефіцієнт шуму не залежить від Rн.
В ідеальному підсилювачі на виході є шуми з генератора, підсилені підсилювачем.
Щоб порівняти 2 підсилювачі за коефіцієнтом шуму, потрібні однакові умови.
Шум – фактор.
 Для ідеального підсилювача Fш.=0. Для ідеального підсилювача Fш.=0.
Обмеження поняття коефіцієнта шуму:
1. Якщо збільшити опір генератора, то шум на виході зросте, а коефіцієнт шуму зменшиться.

2. Якщо опір джерела (генератора) чисто реактивний, то kш.= - він не має сенсу. - він не має сенсу.
3. Коли шуми пристрою малі порівняно із шумами джерела, то kш. 1, тоді має місце велика похибка вимірювання. 1, тоді має місце велика похибка вимірювання.
Відношення сигнал-шум по потужності:

Методи вимірювання коефіцієнта шуму.
1.
Метод фіксованої частоти.
На якійсь частоті f знаходимо залежність kш. від f і знаходимо спектральний коефіцієнт шуму
kш.( f).
 
Три етапи вимірювання:
І – вимикаем генератор Uг=0 і вимірюємо шуми на виході, які відповідають значенню Uш.вих.
ІІ – вмикаємо Uг і змінюємо напругу генератора так, щоб на виході потужність (квадрат напруги) була в 2 рази більшою за попереднє значення. Заміряємо цю величину.
ІІІ –
Недолік: вимірювання іде на одній частоті, а якщо спектр суцільний, то користуються інтегральним коефіцієнтом шуму.
2.
Інтегральний метод.
 Як джерело сигналу використовують генератор білого шуму (дробові шуми діода). Джерело напруги задає шум: Як джерело сигналу використовують генератор білого шуму (дробові шуми діода). Джерело напруги задає шум:
 - формула Шоткі для дробового шуму, коли його можна вважати рівномірним. - формула Шоткі для дробового шуму, коли його можна вважати рівномірним.

Методика:
1) I0=0 (тобто Е=0), вимірюємо квадрат Uш. на виході;
2) Вмикаємо генератор шуму і збільшуємо напругу, встановлюючи такий I0, щоб шум на виході був в 2 рази більшим.

3) Вимірюємо
Інтегральний коефіцієнт шуму не залежить від смуги частот, його просто виміряти. Дає змогу оцінити вплив всіх частот сигналу.
Вихідний шум (якщо відомий kш.):

Відношення сигнал-шум:
Вводять поняття сумарної еквівалентної напруги вхідних шумів:
 - сумарна напруга підсилювача приведена да входу. Можемо виміряти шум на виході, не знаючи, в якій частині схеми він утворився. - сумарна напруга підсилювача приведена да входу. Можемо виміряти шум на виході, не знаючи, в якій частині схеми він утворився.
  - шуми підсилювача (прилада) замінюються джерелом шуму. Можна замінити підсилювач ідеальним, а всі шуми замінити джерелом шуму (джерелом напруги шумів). Якщо Rг=0, то Uш=0 – це абсурд, тобто таку модель можливо використовувати тільки при Rг - шуми підсилювача (прилада) замінюються джерелом шуму. Можна замінити підсилювач ідеальним, а всі шуми замінити джерелом шуму (джерелом напруги шумів). Якщо Rг=0, то Uш=0 – це абсурд, тобто таку модель можливо використовувати тільки при Rг 0 (тільки при активному опорі генератора). 0 (тільки при активному опорі генератора).
Більш повна і краща модель:
Шуми внутрішні, приведені до входу, замінюються двома джерелами шуму: джерелом напруги Uш і джерелом струму Iш. Якщо відомі обидві ці величини і коефіцієнти їх кореляції, то можемо найбільш повно описати шуми, при цьому їх можна також розрахувати.

Uш відображає шуми пристрою за умови, що Rг=0.
Iш. моделює додаткові шуми, які з’являються при Rг0 .

Ці параметри можна розрахувати, а можна виміряти експериментально таким чином:
1) Rг=0; вимірюємо 
2)
Щоб знайти мінімальне значення коефіцієнта шуму, візьмемо похідну для знаходження екстремума:
Для максимального відношення сигнал-шум, необхідно, щоб виконувалась умова:
 . .
Одночасно забезпечити мінімальний коефіцієнт шуму та максимальне відношення сигнал-шум неможливо. Але є вихід з цього положення:
В діапазоні  відношення сигнал-шум мало змінюється. Доцільно вибирати відношення сигнал-шум мало змінюється. Доцільно вибирати  . Якщо . Якщо  , тоді не збільшують Rг додатковим опором (це причина додаткових шумів), а між генератором і підсилювачем встановлюють трансформатор опору. , тоді не збільшують Rг додатковим опором (це причина додаткових шумів), а між генератором і підсилювачем встановлюють трансформатор опору.
Вводять поняття інтенсивності власних шумів:

Еквівалентна температура вхідних шумів:
Якщо підсилювач багатокаскадний:
|
