| Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Дальневосточный государственный технический университет (ДВПИ им. В.В. Куйбышева)
Кафедра конструирования и производства радиоаппаратуры
Курсовая работа
по дисциплине «Моделирование систем»
на тему:
Исследование работы системы автоматического управления двигателем постоянного тока с независимым возбуждением с использованием пакета Matlab 6.1
Выполнил:
студент группы Р-7791
Павловский М.И.
Проверил: Кацурин А.А.
Владивосток 2010
СОДЕРЖАНИЕ
АННОТАЦИЯ
1. ВВЕДЕНИЕ
2. ЗАДАНИЕ К КУРСОВОЙ РАБОТЕ
3. КРАТКОЕ ОПИСАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ
4. ИССЛЕДОВАНИЕ РАБОТЫ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
4.1 Подготовка структурной схемы системы и ее модели
4.2 Оптимизация параметров регуляторов
4.3 Проверка работы системы управления на структурной схеме с оптимизированными параметрами регулятора
4.4 Подготовка электрической схемы системы управления и проверка ее работы
5 ЗАКЛЮЧЕНИЕ
АННОТАЦИЯ
Во введении содержится постановка задачи и описывается цель данной курсовой работы.
В разделе «Задание к курсовой работе» приводится задание на моделирование системы в соответствии с вариантом.
Раздел «Краткое описание системы управления» содержит функциональную схему системы управления и принцип её работы.
В разделе «Исследование работы системы автоматического управления» приводятся полученные структурная и электрическая схемы модели системы. Производится расчет оптимальных показателей регуляторов на структурной системе, и приводятся временные зависимости основных параметров системы управления двигателем постоянного тока с независимым возбуждением, как для структурной, так и для электрической схем. Затем приводится анализ и сравнение работы данных схем.
Заключение содержит краткий вывод по проделанной курсовой работе.
1
. ВВЕДЕНИЕ
В настоящее время при анализе систем наибольшее распространение получил системный подход.
Важным для системного подхода является определение структуры системы – совокупности связей между элементами системы, отражающих их взаимодействие.
Целью моделирования нашей системы является:
1) оценка – оценка действительных характеристик проектируемой системы и определение того, насколько система предлагаемой структуры будет соответствовать предъявляемым требованиям.
Реклама

2) оптимизация – найти или установить такое сочетание действующих факторов и их величин, которое обеспечивает наилучшие показатели эффективности системы в целом.
В процессе выполнения курсовой работы нам будет необходимо исследовать работу системы автоматического управления двигателем постоянного тока с независимым возбуждением.
Исследование системы необходимо будет выполнить на структурной и электрической модели системы в среде Matlab.
2
. ЗАДАНИЕ К КУРСОВОЙ РАБОТЕ
Цель работы: Исследование работы системы автоматического управления двигателем постоянного тока с независимым возбуждением.
Выполнить моделирование работы системы обеспечивающей изменение скорости вращения двигателя постоянного тока по следующему закону  при постоянном моменте нагрузки на валу двигателя при постоянном моменте нагрузки на валу двигателя  . В качестве регулятора скорости необходимо использовать ПИ-регулятор. . В качестве регулятора скорости необходимо использовать ПИ-регулятор.
Ограничения, накладываемые на переходную функцию:
1) Максимальное перерегулирование – не более 5%.
2) Время нарастания – не более 1с.
3) Длительность переходного процесса – не более 3с.
Таблица 1 – Параметры системы
| Вар.
|

|
|
TГПН
|

|
Uпит
|
Параметры двигателя
|
| 
|

|

|

|

|

|
| 
|

|
c
|
В
|
В
|
Ом
|
Гн
|
Ом
|
Гн
|
Гн
|

|
| 6
|
150
|
350
|
0.04
|
10
|
460
|
0.121
|
0.00253
|
45.2
|
5.07
|
0.387
|
1.5
|
3
. КРАТКОЕ ОПИСАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ
Обобщенная функциональная схема системы управления представлена на рисунке 1:

Рисунок 1 – Функциональная схема системы управления
На схеме введены следующие обозначения:
1) ЗС – задатчик скорости;
2) ЗМ – задатчик момента нагрузки;
3) Р – регулятор;
4) ШИП – широтно-импульсный преобразователь;
5) ДПТ – двигатель постоянного тока.
Система работает следующим образом. Задатчик скорости ЗС формирует требуемый сигнал скорости  , из которого вычитается текущее значение скорости w двигателя постоянного тока. Полученная разность поступает на регулятор скорости Р, который вырабатывает требуемый сигнал управления , из которого вычитается текущее значение скорости w двигателя постоянного тока. Полученная разность поступает на регулятор скорости Р, который вырабатывает требуемый сигнал управления  . Широтно-импульсный преобразователь ШИП обеспечивает преобразование маломощного сигнала управления в соответствующее ему значение напряжения якорной цепи ДПТ . Широтно-импульсный преобразователь ШИП обеспечивает преобразование маломощного сигнала управления в соответствующее ему значение напряжения якорной цепи ДПТ  . При этом на ДПТ воздействует момент нагрузки . При этом на ДПТ воздействует момент нагрузки  , сформированный с помощью задатчика момента ЗМ. , сформированный с помощью задатчика момента ЗМ.
4
. ИССЛЕДОВАНИЕ РАБОТЫ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
4.1 Подготовка структурной схемы системы и ее модели
Для выполнения курсовой работы необходимо сначала получить передаточные функции всех основных элементов системы: ПИ-регулятора (Р), широтно-импульсного преобразователя (ШИП) и двигателя постоянного тока (ДПТ). Передаточная функция широтно-импульсного преобразователя имеет вид:
Реклама

 , ,
где  - коэффициент передачи преобразователя, - коэффициент передачи преобразователя,  - постоянная времени преобразователя. - постоянная времени преобразователя.
Подставив в формулы все необходимые значения из таблицы 1, найдём передаточную функцию широтно–импульсного преобразователя:
 , ,
 , ,
 . .
В качестве ШИП в курсовой работе предполагается использовать широтно-импульсный регулятор постоянного напряжения.
Двигатель постоянного тока независимого возбуждения можно описать следующей системой дифференциальных уравнений:
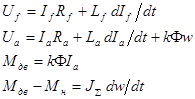 , ,
где  , ,  - суммарный момент инерции двигателя и нагрузки. - суммарный момент инерции двигателя и нагрузки.
Обозначив  , представленную систему уравнений можно переписать в следующем виде: , представленную систему уравнений можно переписать в следующем виде:
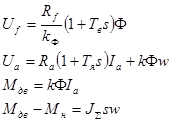 , ,
где  - электромагнитная постоянная времени обмотки возбуждения, - электромагнитная постоянная времени обмотки возбуждения,  - электромагнитная постоянная времени цепи якоря, - электромагнитная постоянная времени цепи якоря,  - коэффициент, соответствующий линейной части кривой намагничивания двигателя. - коэффициент, соответствующий линейной части кривой намагничивания двигателя.
Структурная схема двигателя постоянного тока независимого возбуждения представлена на рисунке 2:

Рисунок 2 – Структурная схема двигателя постоянного тока
Подставив в формулы все необходимые значения из таблицы 1, определим структурную схему двигателя постоянного тока в соответствии с вариантом задания:
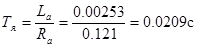
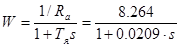



Рисунок 3 – Структурная схема двигателя постоянного тока с числовыми значениями
Зная передаточные функции отдельных элементов, необходимо составить структурную схему всей системы в целом, собрать её в Matlab и определить параметры регуляторов при помощи пакета Nonlinear Control Design (NCD).
Виртуальная лабораторная установка для определения параметров регуляторов показана на рисунке 4.
Данная схема содержит:
1) Пропорционально–интегральный регулятор (ПИ-регулятор), отображаемый параллельно соединенными пропорциональным звеном с коэффициентом пропорциональности kp и интегрирующим звеном с коэффициентом ki;
2) Широтно–импульсный регулятор (PWR);
3) Двигатель постоянного тока, включающий в себя блоки W, kf, Jsum и контур обратной связи с блоком kf1;
4) Контур обратной связи и звено сравнения Sum;
5) Источник входного сигнала в виде единичного скачка (Step);
6) NCD-блок типа NCD Output, подключенный к выходу системы.

Рисунок 4 – Модель системы для определения параметров ПИ-регулятора.
4.2 Оптимизация параметров регуляторов
В данном случае контролируемым сигналом является реакция системы на единичный скачок, то есть ее переходная функция. Оптимизируемыми параметрами являются коэффициенты kp
, ki
, а ограничения, накладываемые на переходную функцию, были сформированы в задании к курсовой работе.
Для оптимизации параметров регулятора необходимо воспользоваться блоком Signal Constraint. В графической части окна этого блока показаны границы контролируемого сигнала. Для изменения границ сигнала необходимо переместить вертикальные и горизонтальные линии ограничений до положений, соответствующих заданным требованиям.
После настройки ограничений сигнала и указания переменных, подлежащих оптимизации можно приступать к процессу поиска нужных значений коэффициентов регулятора.
Результат работы блока Signal Constraint представлен на рисунке 5:

Рисунок 5 – Показания блока Signal Constraint
Для достижения необходимого качества переходного процесса параметры Kp
, Ki
должны быть следующими:
Kp
= 0.1213;
Ki
= 1.3100;
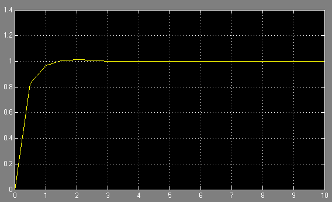
Рисунок 6 – Реакция оптимизированной системы управления на единичный ступенчатый сигнал
4.3 Проверка работы системы управления на структурной схеме с оптимизированными параметрами регулятора
На рисунке 7 представлена полная структурная схема системы управления двигателем постоянного тока независимого возбуждения.

Рисунок 7 – Структурная схема системы управления двигателем постоянного тока независимого возбуждения.
Данная схема содержит:
1) Пропорционально–интегральный регулятор (ПИ-регулятор), отображаемый параллельно соединенными пропорциональным звеном с коэффициентом пропорциональности kp = 0.1213 и интегрирующим звеном с коэффициентом ki = 1.31.
2) Нелинейный блок ограничения Saturation.
3) Широтно–импульсный регулятор (PWR).
4) Двигатель постоянного тока, включающий в себя блоки W, kf, Jsum и контур обратной связи с блоком kf1.
5) Контур обратной связи и звено сравнения Sum.
6) Блок элементов, реализующий изменение скорости вращения двигателя постоянного тока, который является входным сигналом системы, по следующему закону  . .
7) Источник момента нагрузки Mn задается константой, так как не должен меняться во время работы схемы.
Работа модели системы управления по структурной схеме представлена на рисунках 8 – 10:
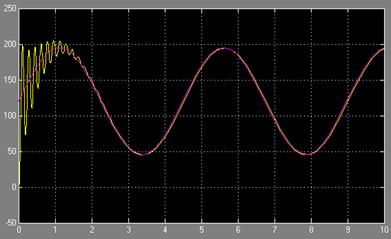
Рисунок 8 – Временная зависимость заданной и текущей скорости вращения w(t).

Рисунок 9 – Временная зависимость Ia(t).
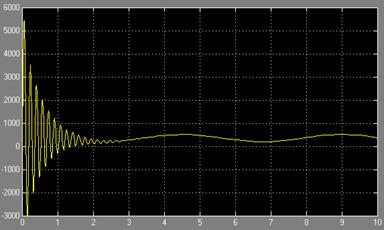
Рисунок 10 – Временная зависимость Мдв(t)
После исследования схемы по полученным графикам, можно сказать, что система автоматического управления соответствует всем заданным требованиям: максимальное перерегулирование менее 5%, время переходного процесса составляет 2,8 секунды, что не превышает заданных 3 секунд. Моделирование данной системы автоматического управления при помощи её структурной схемы дает нам представление лишь об идеальной работе нашей автоматизированной системы без каких-либо погрешностей, которые могут проявляться при ее реальной работе. Поэтому для более полного представления о работе нашей системы соберем модель её электрической схемы.
4.4 Подготовка электрической схемы системы управления и проверка ее работы
В соответствии со структурной схемой системы управления (рисунок 1) сигнал с выхода регулятора должен поступать на ШИП, который включает в себя: источник постоянного напряжения, силовой полупроводниковый ключ (Mosfet транзистор), обратный диод и схему управления силовым ключом. Для управления силовым транзистором необходимо получить последовательность импульсов регулируемой длительности. Для этого сигнал управления, сформированный регулятором, должен сравниваться с сигналом генератора пилообразного напряжения.
Силовое напряжение, сформированное ШИП, должно поступать на якорную обмотку двигателя постоянного тока независимого возбуждения.
Так как по заданию необходимо обеспечить изменение скорости вращения двигателя постоянного тока по следующему закону  , то в схему необходимо добавить блоки, которые будут рассчитывать данную функцию. , то в схему необходимо добавить блоки, которые будут рассчитывать данную функцию.
Виртуальная лабораторная установка электрической схемы системы управления показана на рисунке 11:

Рисунок 11 – Электрическая схема системы управления двигателем постоянного тока независимого возбуждения
Данная схема содержит:
1) Блок элементов, реализующий функцию изменения скорости вращения двигателя постоянного тока.
2) Пропорционально–интегральный регулятор (ПИ-регулятор), отображаемый параллельно соединенными пропорциональным звеном с коэффициентом пропорциональности kp = 0.1213, интегрирующим звеном с коэффициентом ki = 1.31.
3) Генератор пилообразного напряжения (Repeating Sequence).
4) Релейный элемент (Relay).
5) Силовой транзисторный модуль на MOSFET – транзистор с обратным диодом (Mosfet).
6) Обратный диод (Diode).
7) Двигатель постоянного тока (DC Machine).
8) Источники постоянного напряжения цепи якоря (460V) и цепи возбуждения (230V).
9) Источник для задания момента нагрузки Мн задается константой, так как не должен меняться во время работы схемы.
10) Блоки для наблюдения (измерения) мгновенных значений угловой скорости ротора (w), тока якорной цепи (Ia), тока цепи возбуждения (If), развиваемого двигателем электромагнитного момента Мдв (обозначенного на модели как Te).
11) Блок Demux для разделения сигналов.
Окно настройки параметров силового полупроводникового модуля (Mosfet) показано на рисунке 12.
В полях настойки заданы:
1) Динамическое сопротивление полупроводникового транзистора в открытом состоянии в Омах (Ron, Ohms).
2) Индуктивность транзистора в открытом состоянии в Генри (Lоn, Н).
3) Сопротивление обратного диода в открытом состоянии в Омах (Rd, Ohms).
4) Начальный ток в модуле (Ic).
5) Параметры демпфирующих цепей (Snubber resistance Rs, Snubber capacitance Cs).

Рисунок 12 – Окно настройки параметров силового модуля.
Окно настройки параметров генератора пилообразного напряжения показано на рисунке 13.
В полях настойки заданы:
1) Диапазон изменения времени (период пилообразного напряжения ТГПН
= 0,04 с).
2) Диапазон изменения выходного сигнала за период (амплитуда выходного сигнала UГПН
= 10 В).

Рисунок 13 – Окно настройки параметров генератора пилообразного напряжения.
Окно настройки параметров двигателя постоянного тока показано на рисунке 14.
В полях настойки заданы:
1) Сопротивления и индуктивность якорной цепи (Ra, La).
2) Сопротивления и индуктивность цепи возбуждения (Rf, Lf).
3) Взаимная индуктивность обмоток якоря и возбуждения (Laf).
4) Момент инерции (J).
5) Коэффициент вязкого трения (Bm).
6) Момент сухого трения (Tf).
7) Начальная скорость (Initial speed).

Рисунок 14 – Окно настройки параметров двигателя постоянного тока
Результат работы электрической модели нашей системы автоматического управления двигателем постоянного тока независимого возбуждения показан на рисунках 15 – 17. Момент нагрузки двигателя постоянен и не изменяется во время работы схемы.

Рисунок 15 – Временная зависимость заданной и текущей скорости вращения w(t).
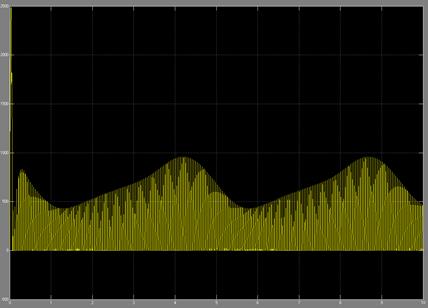
Рисунок 16 – Временная зависимость Ia(t)

Рисунок 17 – Временная зависимость Мдв(t)
После исследования электрической схемы по полученным графикам, можно сказать, что она соответствует заданным требованиям. Электрическая схема обеспечивает изменение скорости вращения двигателя постоянного тока по закону  при постоянном моменте нагрузки на валу двигателя при постоянном моменте нагрузки на валу двигателя  . В отличие от структурной схемы, где характеристики выглядят идеально, в электрической схеме наблюдается небольшое колебание сигналов относительно заданных значений. Это может быть связано с возможными погрешностями электрических элементов схемы. . В отличие от структурной схемы, где характеристики выглядят идеально, в электрической схеме наблюдается небольшое колебание сигналов относительно заданных значений. Это может быть связано с возможными погрешностями электрических элементов схемы.
5
. ЗАКЛЮЧЕНИЕ
В данной курсовой работе было проведено исследование работы системы автоматического управления двигателем постоянного тока с независимым возбуждением с ПИ-регулятором. В ходе работы было выполнено моделирование системы управления в среде Matlab 6.1. С помощью пакета Nonlinear Control Design (NCD) были подобраны параметры регуляторов структурной схемы в соответствии с предъявляемыми требованиями, а с помощью пакета Power System Blockset была исследована электрическая схема системы.
В процессе исследования работы двух схем были выделены все основные особенности и различия этих двух типов схем, а также показаны основные временные характеристики двигателя постоянного тока с независимым возбуждением.
|
