| МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ (ФИЛИАЛ)
ГОСУДАРСТВЕННОГО ОБРАЗОВАТЕЛЬНОГО УЧЕРЕЖДЕНИЯ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ЯКУТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ» им. М. К. Аммосова в г. МИРНОМ
КУРСОВОЙ ПРОЕКТ
по дисциплине: «Механическое оборудование карьеров»
студента группы ГМиО-06
ПТИ (ф) ЯГУ в г. Мирном
по специальности «Горные Машины и Оборудование»
Горин Станислав Кириллович
(фамилия, имя, отчество)
Проверил преподаватель:
Ассистент каф. ГМиО
Ф.и.о.,звание, должность
Золотухин Г.К.
Мирный, 2009
Реферат
Данная работа содержит:
2 таблиц, 5 рисунка, 22 страниц.
Объекты исследований:
ЭШ-11.70
Цель работы:
Произвести расчет одноковшового экскаватора с учетом их рабочих параметров применительно к конкретным горнотехническим условиям.
Ключевые слова:
Экскаватор, драглайн, подъемный механизм, напорный механизм, тяговое усилие, ковш, стрела, рукоять, канат.
Аннотация:
В данном курсовом проекте содержится расчет одноковшового экскаватора типа – ЭШ-11.70, включающего в себя – мощность тяговой и подъемной лебедок драглайна, тяговый расчет гусеничного экскаватора, статический расчет.
Содержание
Введение
1. Исходные данные
2. Загрузка приводов основных механизмов ЭШ-11.70
2.1. Мощность тяговой и подъемной лебедок драглайна
2.2. Тяговый расчет гусеничного экскаватора
3. Статический расчет ЭШ-11.70
3.1. Уравновешенность поворотной платформы
Заключение
Список используемой литературы
Введение
Горно-геологические условия большинства месторождения обесславливают применение одноковшовых экскаваторов. При этом наиболее трудоемкими являются вскрышные работы. Использование на вскрышных работах прогрессивных бестранспортных схем экскавации с применением высокопроизводительных машин позволяет перемещать большие массы пород на значительное расстояние с минимальными затратами.
Наибольшее распространение получили системы разработки с использованием экскаваторов - механических лопат, которые могут применяться в самых тяжелых климатических и горно-геологических условиях.
При проектировании горных работ особенно важным является правильный выбор экскаватора и определение загрузки его механизмов при работе в конкретных условиях. Решение этого вопроса позволяет разработать практические мероприятия для повышения производительности машин и улучшения их эксплуатации.
Реклама

1.
Исходные данные
Для расчета принят экскаватор ЭШ-11.70. вариант №2
Техническая характеристика карьерного экскаватора ЭШ-11.70 приведена в табл. 1.
Таблица 1 Техническая характеристика ЭШ-11.70
| Показатели
|
ЭШ-11.70
|
| Вместимость ковша, м3
:
|
11
|
| Угол наклона стрелы, градус
|
30
|
| Длина стрелы А, м
|
70
|
| Ширина кузова, м
|
10
|
| Высота экскаватора без стрелы Нк
, м
|
6,73
|
| Скорость передвижения, км\ч.
|
0,2
|
| Мощность сетевого двигателя, кВт
|
1460
|
| Продолжительность цикла
|
52,5
|
| Масса экскаватора с противовесом, т
|
550
|
| Категория грунта
|
2
|
| Коэффициент разрыхления
|
1,2
|
2.
Загрузка приводов основных механизмов
ЭШ-11.70
Электроприводы главных механизмов одноковшовых экскаваторов работают в повторно – кратковременном режиме с большой частотой включений и торможений, т.е. с резко переменной скоростью. Поэтому целесообразно определить средневзвешенную мощность из выражения
Где  - мощности, потребляемые двигателем за отдельные промежутки времени ti
в течение цикла; - мощности, потребляемые двигателем за отдельные промежутки времени ti
в течение цикла;  – продолжительность работы механизма за один цикл ; n – число операций в цикле, для одноковшового экскаватора n = 3. – продолжительность работы механизма за один цикл ; n – число операций в цикле, для одноковшового экскаватора n = 3.
Для определения средневзвешенной мощности двигателя необходимо предварительно построить нагрузочные диаграммы механизмов, отражающие зависимости усилий в функции времени P=f(t), и скоростные диаграммы, отражающие зависимость скорости перемещения рабочего органа за эти же отрезки времени V=f(t).
Время, затрачиваемое на операции поворота платформы экскаватора типа прямой механической лопаты с груженым ковшом на разгрузку и возвращение пораженного ковша в забой, составляет 60-70% полного времени цикла работы экскаватора. Поэтому в инженерных расчетах время цикла разбивают на три разных периода: копание tk
= 1\3 T4
; поворот платформы на разгрузку ковша tp
= 1\3 T4
; поворот платформы с пирожниковым ковшом в забой t3
= 1\3 T4
.
2.1 Мощность тяговой и подъемной лебедок драглайна
1. Масса экскаватора:
mэ
= Кэ
∙Е = 50∙11 = 550 т.
где Е – объем ковша, м3
;
Кэ
- выбираем из рекомендуемого диапазона 38-55 т/м3
2. Линейные размеры ковша:
Ширина Bk
=1,15∙3
√Е=1,2∙3
√11=1,15∙2,2=2,53 м;
Длина Lk
=1,2∙ Bk
=1,2∙2,53 =3,03 м;
Высота Hk
=0,65∙ Bk
=0,65∙2,53 =1,64 м;
3. Масса и вес ковша:
mк
= K1
(K2
+E)E2\3
= 0,046∙ (40,6+11)112\3
= 11,8 т
Реклама

Gк
=
9,81 ∙ mков
∙103
=9,81∙11,8 ∙103
=11,5∙104
Н;
где К1
и K2
– коэффициент пропорциональности (0,143 и 9,6 для легких; 0,092 и 20 для средних; 0,046 и 40,6 для тяжелых) табл.1 [2]
4. Масса и вес породы в ковше:
mпор
= E ∙ γ/Kp
=11 ∙ 2,5/1,2=22,9 т;
Gг
=9,81∙ mпор
∙103
=9,81∙22.9 ∙103
=22.4∙104
H;
где γ – плотность породы в целике, т/м3
(γ =1,8÷2,5) табл. П6 [2]
5. Высота напорного вала:
Нн
= КL
н
∙3
√mэ
=2,5∙8.1=20,2 м;
где КL
н
- коэффициент пропорциональности стрелы (КL
н
=2,5) табл. П8 [2]
6. Сила тяжести груженного ковша:
Gk
+г
= Gк
+ Gг
,= 11,5∙104
+ 22,4∙104
=33,9∙104
Н
где Gk
– собственная сила тяжести ковша; Gг
– сила тяжести грунта в ковше.
Усилие в тяговом канате можно определить, проектирую все силы, действующие на ковш, на ось, параллельную линии относа уступа (рис.2.1).
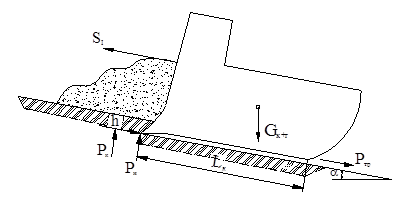
Рис. 2.1
. Схема к расчету усилий на ковше драглайна
Sг
=Pк
+Gк
+
г
*sinα+Pтр
=Pк
+Gк
+
г
*sinα+fGк
+
г
*cosα = 25∙104
+33,9∙104
∙0,25+ +0,4∙33,9∙104
∙0,96=46,4∙104
Н
Принимаем sin150
=0,25; cos150
=0,96.
Усилие копания определяется из формулы Н.Г. Домбровского:
Pк
= K1
*F = K1
*h*b = 2,5∙102
∙1= 2,5∙102
кН
где К1
– удельное сопротивление (см.табл.I) копанию, кН/м2,
h – толщина снимаемой стружки, м; b – ширина стружки, м; f – коэффициент трения ковша о породу (принимается равным 0,4).
Наполнение ковша происходит на пути наполнения:
Lн
= φ*Lk
=3,5∙3,03 =10,6 м
где φ – коэффициент пути наполнения (табл. 3); Lk
– длина ковша.
Объем разрыхленной породы в процессе наполнения ковша:
Vпор
.
рых
.
= Lн
*h*b*Кр
= φ*Lk
*h*b*Кр
=10,6∙2∙0,5∙1,2=12,72 м3
где Кр
– коэффициент разрыхления (табл.1).
Vпор
.
рых
.
= Е+ Vпр
.
вол
.
=11+3,3=14,3
где Vпр.вол.
– объем призмы волочения, м3
.
Vпр.вол.
= С*Е=0,3∙11=3,3 м3
где С – коэффициент волочения (табл. 3);
Тогда,
Е+Е*С = Lк
*φ*h*b*Кр
Откуда,
 =11∙(1+0,3)/3,03∙3,5∙0,5∙1,2=14,3/6,3=2,26 =11∙(1+0,3)/3,03∙3,5∙0,5∙1,2=14,3/6,3=2,26
 = 25∙104
∙11∙(1+0,3)/3,5∙3,03∙1,2=357,5/12,7 = 28,1∙104 = 25∙104
∙11∙(1+0,3)/3,5∙3,03∙1,2=357,5/12,7 = 28,1∙104
Значения коэффициента пути наполнения φ и коэффициента волочения С приведены в табл.3
Таблица 3.
| Грунт
|
φ
|
С
|
| Песок, супесок, чернозем, растительный грунт, торф
|
3,0
|
0,4
|
| Суглинок, гравий мелкий и средний, глина легкая, влажная или разрыхленная
|
3,5
|
0,3
|
| Глина жирная, тяжелый суглинок, лесс, смешанный с галькой, щебень, строительный мусор, растительный грунт с корнями деревьев
|
4,0
|
0,23
|
| Конгломерат, тяжелая ломовая или сланцевая глина, меловые породы
|
5,5
|
0,2
|

Рис. 2.2. Схема работы драглайна.
Усилие в тяговом канате:
Sт
(
к
)
=(K1
∙E∙(1+C)/φ∙Lk
∙Kp
)+Gк
+
г
∙sinα+f∙Gк
+
г
∙cosα=
=25∙104
∙11∙(1+0,3)/3,5∙3,03∙1,2+33,9∙104
∙sin450
+0,4∙33,9∙104
∙cos450
=
=31,1∙104
+15,35∙104
+9,8∙104
=61,1∙104
Н
принимаем sin450
=0,7 ;cos450
=0,7
Предельный угол откоса α принимается равным для:
легких грунтов – 45-500
;
средних – 45-400
;
тяжелых – 30-350
.
Максимальное расчетное значение силы тяги при многомоторном приводе постоянного тока:
Sт
max
=Sт(к)
/(0,7-0,8)= 61,1∙104
/0,7=87,2∙104
Н
Запас прочности тягового канала для экскаваторов малой и средней мощности принимается равным 3,75-4,0; для экскаваторов большой мощности – 4,25-4,75.
Соотношение диаметров тягового барабана Дб.т.
и диаметра каната αк.т.
следующее:
для экскаваторов малой и средней мощности. 
для экскаваторов большой мощности. 
Усилия в подъемном канате для экскаваторов с многомоторным приводом постоянного тока.
при отрыве груженого ковша от забоя:
 =1,5∙33,9∙104
=50,85∙104
Н =1,5∙33,9∙104
=50,85∙104
Н
при подъеме груженого ковша:
Sп
= Gк+г
+ Gкан
=33,9∙104
+421,8∙104
=455,7∙104
Н
где Gкан
– сила тяжести каната длиною от ковша, расположенного на забое, до головных блоков стрелы (Gкан
= 421,8×104
Н, диаметр 41мм) [3].
По аналогии с тяговым механизмом определятся запаса прочности подъема каната:
k = Sк
.
разр
/Sп
.max
= 1000/6510 = 0,15 кН.
где Sк.разр
- суммарное разрывное усилие проволок подъемного каната, (Sк.разр
= 1000 кН) [3], Sп.
max
– максимальное усилие подъема.
Sп.
max
=Sп
/0,7-0,8 = 455,7∙104
/0,7 = 651∙104
Н.
При определении загрузки двигателя механизма тяги в период копания скорость передвижения коша драглайна принимается равной номинальной. Мощность двигателя тяговой лебедки при копании:
Nт
(k)
= Sn(k)
Vт
.
ном
/
1020∙ηт
=61.1∙104
∙1/1020∙0.6=998.3кBт
где ηт
КПД тягового механизма, ηт
=ηб
×ηрад.
(здесь ηб
– КПД блоков и барабана; ηрад
– КПД редуктора тяговой лебедки).
При повороте платформы драглайна с груженным ковшом на разгрузку на тяговый канат действует две силы: сила, равная примерно половине веса груженого ковша, которая удерживает ковш в горизонтальном положении, и центростремительная сила , который удерживает ковш на траектории движения вокруг оси вращения платформы и направлена вдоль тягового каната:
Sт(
p
)
= ( Gк+г
)/2) + Рu
.
c
тр
= ( Gк+г
)/2) + (Gк+г
ω2
rк+г
/g) = (33.9∙104
/2) +
( 33.9∙104
∙(2∙3.14∙1) 2
∙66.5)/9.81=9079.8∙104
Н.
где ω – угловая частота вращения платформы драглайна(ω = 2πv); rк+г
– радиус вращения груженого ковша относительно оси поворотной платформы (rк+г
=66,5м, [4]); g – ускорение силы земного притяжения.
В период поворота платформы с груженным ковшом на разгрузку используется режим ослабления поля возбуждения тяговых двигателей, тем
самым достигается увеличение скорости тягового каната на 10 – 20 %. Загрузка двигателя механизма тяги.
Nт
(p)
= (Sт
(p)
∙(1.1-1.2) ∙ Vт
.
ном
)/1020∙ ηт
=(9079.8∙104
∙1.1∙1)/1020∙0,6=163кВт
При повороте платформы с порожним ковшом в забой
Nт
(s)
= (Sт
(s)
∙(1.1-1.2) ∙ Vт
.
ном
)/1020∙ ηт
=(3080.2∙104
∙1.1∙1)/1020∙0,6=55.3кBт
где
Sт
(s)
=(Gk
/2)+( Gk
ω2
rк
+
г
)/g=(11.5∙104
/2)+(11.5∙(2∙3.14∙1) 2
∙66.5)/9.81=3080.2∙104
Н.
Средневзвешенная мощность двигателя механизма тяги драглайна:
Nт
.
св
=(Nт
(
к
)
∙tк
+Nт
(p)
∙t р
+ Nт
(s)
∙t з
)/ Tц
=(998,3∙15,75+163∙18,375+55.3∙18,375)/52.5=
=375,8кВт
Диаграмма разгрузки механизма тяги драглайна в период копания, поворота груженого ковша на разгрузки и порожнего в забой представлен на (рис. 2.2).
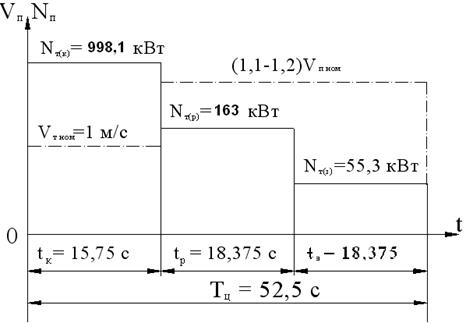
Рис. 2.2.
Диаграмма разгрузки механизма тяги драглайна в период копания
Во время копания двигатель механизма подъема драглайна не загружен. При отрыве ковша от забоя, которое продолжается 2-3 с, усилие в подъемном канате наибольшее (S’п
). частота вращения якоря подъемного двигателя при этом близка к номинальной.
Мощность подъемного двигателя в момент отрыва ковша от забоя:
Nпд
=(К∙Sпд
∙Vпд
)/(1020∙η)=(1∙5085∙104
∙2)/(1020∙0.8)=1246кВт
Sпд
=(1,5-1,7) Gк
+
г
=1,5∙33,9∙104
=50,85∙104
Н
При дальнейшем подъеме ковша с грунтом и повороте его месту разгрузки подъем осуществляется с номинальной скоростью. Мощность двигателя подъемного механизма за время поворота платформы к месту разгрузки
Nп
(
р
)
=( Кр
∙Sп
∙Vп
.
ном
)/(1020∙ ηп
)=(1∙33,9∙104
∙1).(1020∙0,6)=553кВт.
При повороте платформы в забой спуск ковша осуществляется в режиме ослабления поля возбуждения двигателя при скорости на 10 – 20% выше номинальной скорости подъема ковша. Усилие в подъемном канате
S˝п
= Gк
=11.5
Мощность двигателя механизма подъема
Nп
(s)
=( S˝п
∙(1,1-1,2) ∙Vт
.
ном
)/1020∙ ηп
=(11.5∙104
∙1.2∙1)/(1020∙0.6)=225,4 кВт
Средневзвешенное значение мощности двигателя механизма подъема драглайна
Nп
.
св
=(Nпд
∙tк
+Nп
(
р
)
∙tр
+Nп
(s)
∙tз
)/Tц
=(1246∙15.75+553∙18.375+225,4∙18.375)/52.5=646 кВт
Диаграммы загрузки механизма подъема драглайна в период копания, отрыва ковша от забоя, поворота груженого ковша на разгрузке и порожнего в забой представлен на (рис.2.3).
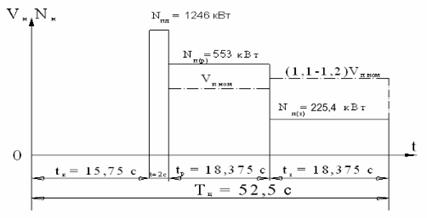
Рис.2.3
. Диаграммы загрузки механизма подъема драглайна в период копания
2.2 Тяговый расчет гусеничного экскаватора
Тяговое усилие гусеничного хода затрачивает преодоление внешних и внутренних сопротивлений

где Sт.
max
– максимальное тяговое усилие на гусеницах; Wвн
– внутренне сопротивление ходового механизма (сопротивление в подшипниках катков и роликов, сопротивление изгибу гусеничных лент на ведущих звездочках и.т.д.); f1
– приведенный коэффициент сопротивлений (f1
=0,05);
G – сила тяжести экскаватора; Wи
– сопротивление инерции при трогании с места
G=Е*g=550*9.81=5395
Wи
=(k∙G∙Vk
)/(E∙tp
)=(1∙5395∙0.5)/11∙3=81.7 кH
здесь k – коэффициент, учитывающий инерционные сопротивления ротора двигателя и вращающихся частей редуктора хода (для многодвигательных экскаваторов с приводом гусеничных тележек от индивидуальных двигателей постоянного тока k = 2; для однодвигательных экскаваторов k= 1; Vк
– скорость хода экскаватора, м\с; g – ускорение силы тяжести g = 9,81 м\с2
; tp
– продолжительность разгона, (принимают tр
= 3c); Wп
– сопротивление подъема, возникающее при движении экскаватора на подъем:
Wп
=G∙sinα=5395∙0.2=1079 кН
где α – угол максимального подъема, преодолеваемого экскаватором; Wг
– сопротивление перекатыванию гусениц по грунту
Wг
= f2
∙ G=0,08∙5395=431,6 кН
f2
= (0,08 – 0,12) – коэффициент сопротивления, зависящий от характера грунта (большие значения принимаются для более мягкого грунта); Wв
– сопротивления движению от встречного ветра ,Wв
=g×F; g – давление ветра на лобовую поверхность экскаватора (принимаются g = 500 н\м2
);
F – площадь лобовой поверхности экскаватора, м2
; Wпэв
– сопротивление повороту (в расчет не принимают, т.к. при повороте экскаватора его движение прекращается и поворот производится при заторможенной одной из гусениц).
Wв
= g∙F = 500∙30 = 15кН
Wпов
=0
Wвн
=G ∙ f1
=5395∙0.05=269.7 кН
Sт.
max
=269,7+1079+81,7+431,6+15=1877 кН
Мощность привода ходового механизма
Vx
=0.6∙Vx
=0.6∙0.5=0.3 м/с
Nk
=( Sт.
max
∙ Vx
)/(1020 ∙ hx
)=(1877∙0.3)/1020∙0.6)=920 кВт
где Vx
– скорость передвижения экскаватора, м\с; hx
– КПД ходового механизма (редуктора).
3. СТАТИЧЕСКИЙ РАСЧЕТ ЭКСКАВАТОРА
Статический расчет экскаваторов имеет целью определить: уравновешенность поворотной платформы, устойчивость экскаватора, усилия в роликах и захватывающих устройствах опорно-поворотного круга, опорные реакции и давления на основание (грунт).
3.1 Уравновешенность поворотной платформы
Уравновесить поворотную платформу — значит устранить выход результирующей веса платформы с механизмами и рабочим оборудованием за пределы периметра опорного круга при повороте платформы с полной нагрузкой и без нагрузки на рабочем органе.
Удерживающий момент Му
(кН*м) образуется от равнодействующей G1
(кН) весов всех вращающихся частей экскаватора (за исключением противовеса и рабочего оборудования) на плече относительно оси вращения платформы. В противоположном направлении на платформу экскаватора действует опрокидывающий момент Мо
(кН*м) от веса рабочего оборудования с грузом, выдвинутым на максимальный вылет.
При определении оптимальных размеров рабочего оборудования, например драглайна, основной заданной величиной является вместимость ковша или длина стрелы. Если обе величины изменять нежелательно, то прибегают к изменению диаметра опорной базы (в известных пределах). Таким образом, расчет уравновешенности платформы сводится к задаче, в которой среди принятых и заданных величин имеются такие, которые могут быть изменены.
Платформа считается уравновешенной, если при любых возможных положениях поворотной части с ковшом (порожним или груженым) соблюдаются следующие необходимые условия:
• равнодействующая весов вращающихся частей с рабочим оборудованием не должна выходить за периметр многоугольника, образованного соединением точек касания опорных катков с поворотным кругом;
• перемещения равнодействующей вперед или назад по отношению к центральной цапфе желательно иметь одинаковыми по величине.
Уравновешивание поворотной платформы достигается соответствующим размещением всех механизмов на поворотной платформе и выбором массы противовеса.
Масса противовеса определяется для двух расчетных положений: I — ковш опущен на почву (веса ковша и рукояти не создают момента); II — груженый ковш выдвинут на 2/3 вылета рукояти.
Первое положение соответствует возможности смещения равнодействующей назад и отвечает, например, для рабочего оборудования лопаты, моменту начала копания при ковше, лежащем на земле (см. рис. 3.1, положение I). При этом подъемный канат ослаблен. Таким образом, веса рукояти Gр
(кН) и ковша Gk
(кH) исключаются из состава опрокидывающих сил. Масса противовеса mnp
1
(т) или его вес Gnp
= g*mnp
(кН) могут быть определены из уравнения моментов относительно точки А. При условии, что равнодействующая VA
весов поворотной части экскаватора (с противовесом и рабочим оборудованием) проходит через точку А (крайнее допустимое положение равнодействующей внутри круга катания с радиусом Rо
получим
mnp1
= (Mo
- My
)/(rпр
- Rо
) •g = [Gc
(rc
+Rо
) – G1
(r1
- Ro
)]/( rпр
- R0
) •g,
где Gc
и G1
— веса стрелы и поворотной платформы с механизмами соответственно, кН; rпр
, rc
, r1
— плечи действия сил (см. рис. 3.1, а).
Второе положение соответствует возможности выхода равнодействующей вперед за точку В. При расчете экскаваторов средней мощности принимают, что груженый ковш выдвинут на 2/3 длины рукояти, а для мощных экскаваторов — на полную ее длину.
Предположим, что равнодействующая VB
весов поворотной части экскаватора проходит через точку В. Тогда масса противовеса из уравнения моментов относительно точки В будет
mпр
= [Gc
(rс
- R0
) + Gр
rp
+ Gк
+
п
rк
– G1
(r1
+ Ro
)]/(rп
p
+ Rо
)*g,
где rp
и rк
— плечи действия сил (см. рис. 3.1, а).
При выборе массы противовеса экскаватора с одним видом рабочего оборудования достаточно получить mпр1
= mпр2
и принять величину противовеса такой, чтобы mпр2
< mпр
< mпр1
.
Если масса противовеса для положения II получается больше, чем для положения I, то это указывает на чрезмерное смещение механизмов на платформе вперед, на слишком длинное и тяжелое рабочее оборудование или на то, что выбранный диаметр поворотного круга мал.
Если mпр2
< 0 < mпр1
, то это свидетельствует об излишне легком или коротком рабочем оборудовании. То же самое может быть и при чрезмерно сдвинутых назад механизмах.
Драглайн.
Масса противовеса для драглайна, как и для лопаты, определяется для двух расчетных положений: I — ковш опущен на землю, стрела поднята на максимальный угол γm
ах
= 45÷50°, II — ковш с породой поднят к голове стрелы, стрела опущена на минимальный угол γmin
= 25÷30°.
Последовательность расчета уравновешенности платформы драглайна такая же, как и для прямой лопаты.
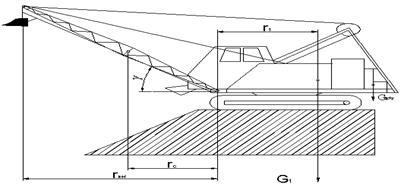
Рис. 3.1 Схема к определению уравновешенности драглайна
Исходные данные:
радиус опорно-поворотного круга Rо
= 2,5 м, массы стрелы с напорным механизмом, рукояти, ковша с породой и платформы соответственно mc
= 100 т; mк+п
= 34,7 т и mпл
=180 т, а плечи противовеса и поворотной платформы соответственно равны rс
=40 м, rпр
=10м, r1
=25м.
В соответствие с рис. 2.1. массу противовеса определяем для двух расчетных положений.
1. Ковш опущен на землю, тогда из уравнения моментов относительно точки А имеем:
mnp1
=[Gc
(rc
+Rо
) – Gпр
(r1
-Ro
)]/g( rпр
-Rо
) = [mc
(rc
+Rо
) – mпл
(r1
-Ro
)]/( rпр
-Rо
)= =[100• (40+2,5) – 180(25 - 2,5)]/(10 - 2,5) = 26,6 т
Определим точку x1
приложения равнодействующей всех сил G действующих на поворотный круг при массе противовеса
mnp1
= 0, тогда G = g• ( mпл
+ mc
) = 9,8• (180+ 100) = 2746 кН,
и из уравнения моментов относительно оси О имеем
mпл
• ( r1
- x1
) = mc
• ( rc
+ x1
),
откуда
x1
= (mпл
r1
– mc
rc
)/( mпл
+ mc
) = (180 • 25-100 • 40)/(180 + 100)= 1,7 м
влево от оси О и внутри поворотного круга.
Если же расположить противовес mnp
1
= 26,6т на расстоянии rпр
= 10 м от оси вращения платформы, то равнодействующая всех сил:
G = g•( mc
+ mпл
+ mnp1
) = 9,81•(100 + 180 + 26,6) = 3007,7 кН,
действующих на поворотный круг будет приложена в точке А, однако эта дополнительная нагрузка на поворотный круг будет отрицательно сказываться на общем балансе весов экскаватора.
2. Груженый ковш выдвинут на 2/3 вылета рукояти, тогда из уравнения моментов относительно точки В имеем:
mnp2
= [mc
•(rc
- Ro
) + mк
+
п
rк
- mпл
∙(Ro
+1,2r1
)]/(rпр
- Rо
) =
= [100• (40 – 2,5)+ 34,7 • 66,5-180•(2,5+1,2•25)]/(10-2,5) = (3700+ 2004,1 - 5940)/7,5 = -31,4
Определим точку x2
приложения равнодействующей всех сил G действующих на поворотный круг при массе противовеса mпр2
= 0, тогда
G = g(mc
+ mпл
+ mк
+
п
) = 9,81• (100 + 180+ 34,7) = 3087 кН,
а из уравнения моментов относительно оси О имеем:
mпл
(r1
+ x2
) = mc
(rс
- x2
) + mр
(rр
- x2
) + mк
+
п
(rк
- x2
),
откуда
x2
= (mc
rс
+ mк+п
rк
- mпл
r1
)/( mc
+ mпл
+ mк+п
) =
= (100•40 + 34,7 • 66,5 -180 • 25)/(100 +180 + 34,7 )= 5,09 м
вправо от оси и внутри поворотного круга.
Равнодействующая всех сил действующих на поворотный круг будет приложена в точке В
только если масса противовеса будет отрицательной величиной, что не имеет физического смысла.
Данный экскаватор имеет удовлетворительно уравновешенную платформу. В расчетных случаях равнодействующая всех сил не выходит за пределы периметра опорно-поворотного круга, что не требует установки балластного груза. [2].
ЗАКЛЮЧЕНИЕ
Приведенная методика расчета экскаватора и расчета загрузки основных его механизмов позволяет обосновать тип принимаемого выемочно-погрузочного оборудования для конкретных горно-геологических и горнотехнических условий, произвести построение нагрузочных диаграмм и определить средневзвешенную загрузку приводов механизмов одноковшовых экскаваторов с учетом условий и особенностей их работы.
Таким образом, результаты расчетов свидетельствуют о необходимости разработки мероприятий по улучшению использования, повышению производительности оборудования и совершенствованию его эксплуатации.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Страбыкин Н.Н., Чудогашев Е.В.,Корякин Б.И. Выбор и расчет одноковшовых экскаваторов: Учеб. пособие.– Иркутск: ИПИ,1987.–52 с.
2. Подэрни Р.Ю. Механическое оборудование карьеров: Учеб. для вузов. - 5-е изд., перераб. и доп. – М.: Издательство Московского государсвенного горного университета, 2003.-606 с.:
3. Трубецкой К.Н., Потапов М.Г., Виницкий К.Е., Мельников Н.Н. и др. Справочник. Открытые горные работы– М.: Горное бюро, 1994.- 590 с.:
4. Викулов . Подъемно транспортные машины
|
