| Введение.
Автомашинист
- так конструкторы назвали систему, которая появилась в нашей стране в 1957 году и предназначалась для автоматического управления поездами с помощью электронной вычислительной машины (ЭВМ). В 1958 под Москвой были проведены испытания пригородного поезда с автомашинистом, который обеспечил выполнение графика движения поездов и точность их остановки. Автомашинист оставляет человеку принятие только самых важных решений. Главный узел этой машины или, как говорят, ее мозговой трест - универсальная вычислительная машина, установленная на «борту» локомотива, поэтому ее называют еще бортовой. Блок памяти машины хранит программу движения и исходные данные для решения задач, связанных с управлением локомотивом.
Первое упоминание об автомашинисте за рубежом относится к 1959, а сообщение об испытаниях первого поезда с ЭВМ в нью-йоркском метро появилось в 1960, где автомашинист решал лишь задачу точной остановки поезда, но не контролировал выполнение графика. Первые образцы автомашиниста для поездов пригородного сообщения за рубежом появились в 1965 для железнодорожного узла в Сан-Франциско (США).
1. Описание базовой технологии.
Автомашинист.
Автомашинист -
автоматическое устройство, помогающее машинисту выполнять график движения с повышенной точностью. Эффективно применяется при малых интервалах между поездами (метрополитен, пригородное ж/д. сообщение).
При движении поезда ЭВМ успешно справляется с включением и выключением тяговых двигателей именно тогда, когда требуются регулирование скорости, обеспечение заданного времени хода. При приближении к станции ЭВМ включает тормозную систему, и поезд останавливается именно там, где ему положено, т. е. обеспечивается «прицельное торможение». А когда поезд остановится, автомашинист не забудет включить устройство, открывающее двери.
Схема работы автомашиниста.
Блок программы движения поезда может быть расположен на центральном пункте (централизованная система), на пути (распределённая система) или на поезде (автономная система). В первом случае команды об изменении режима движения для каждого поезда вырабатываются в вычислительном центре на основании информации, поступающей от всех поездов, и передаются на нужный поезд, для чего каждый поезд должен иметь свой адрес, присвоенный ему либо участку, по которому он движется, независимо от номера поезда. На поезде сохраняются только исполнительная аппаратура и устройства для передачи информации и приёма команд. Эта система наиболее перспективна, однако требует большого числа каналов двусторонней связи между центральным пунктом и движущимся поездом.
Реклама

При расположении блока программы на пути роль центрального пункта ограничивается передачей единого для всех поездов времени, сигналов, корректирующих движение поезда, и, при наличии более чем одной программы,- сигналов, включающих нужную из программ. Устройства на поезде такие же, как и в первом случае. Такой способ наиболее приемлем для участков с однотипными поездами (метрополитены).
Расположение блока программы на локомотиве (поезде) позволяет вести по участку разнотипные поезда. Число каналов связи с центральным пунктом минимальное и может ограничиваться передачей единого времени. Программа выбирается автоматически, дистанционно или машинистом в соответствии с номером нитки графика. Способ наиболее пригоден при постепенном переводе поездов на автоматическое управление.
Автоматические системы регулирования движения поездов обеспечивают оперативное руководство, при этом соблюдается максимальный уровень безопасности, оказывают влияние на рост производительности труда работников и являются основными системами, применяемыми на магистральном железнодорожном транспорте. В зависимости от места применения автоматические системы регулирования движения подразделяются на перегонные и станционные:
- Перегонные системы разрешают или запрещают отправление поезда на перегон или регулируют движение поезда непосредственно по перегону.
Полуавтоматическая блокировка
(Па/б) – сигналы, разрешающие занять поезду перегон или блок-участок, открываются при определенных действиях работников, а закрываются автоматически (в частности, на однопутных линиях, для открытия выходного светофора необходимо предварительно получить по блок-аппарату от дежурного по соседней станции, на которую отправляется поезд блокировочный сигнал согласия).
- Автоматическая блокировка
(а/б) – управление показаниями светофоров, ограждающих блок-участок осуществляются движущимся поездов (автоматически).
o Автоматическая локомотивная сигнализация
(АЛС) и устройства безопасности (КЛУБ, САУТ и т.д.) – с помощью этих систем показания напольных светофоров передаются в кабину машиниста.
- Станционные системы обеспечивают взаимную зависимость стрелок и сигналов при движении поездов и маневровых составов, контролируют положение стрелок, не допускают их перевоз в уже заданном маршруте.
- Ключевая зависимость
– используется на станциях, где сохранено ручное управление стрелками для обеспечения взаимного замыкания сигналов и стрелок посредством контрольных замков.
- Электрическая централизация
– обеспечивает управление стрелками и сигналами с пульта управления. Разновидности такой системы: релейная централизация, блочная маршрутно-релейная централизация и микропроцессорная централизация (при которой вместо пульт-манипулятора используется АРМ-ДСП на основе ПК).
- Диспетчерская централизация
– позволяет управлять стрелками и сигналами ряда станций из одного пункта при помощи систем телеуправления
- Средства автоматизации сортировочных горок
– управление стрелками и сигналами при роспуске составов с сортировочной горки, регулирование скорости надвига и роспуска. Включают системы: ГАЦ (горочная автоматическая централизация), ГПЗУ (горочное программно-задающее устройство, в которое вводится информация о количестве отцепов, их размере и пути подгорочного парка), ТГЛ (телеуправление горочным локомотивом).
Таким образом, автоматические системы регулирования движения служат для автоматизации процессов управления. Эти системы постоянно совершенствуются, благодаря чему повышаются технико-экономические показатели эксплуатационной работы железнодорожного транспорта.
Реклама

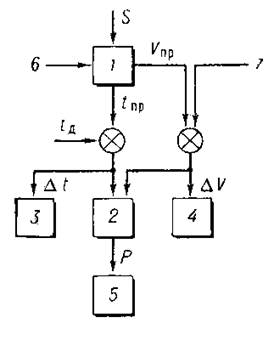
Автомашинист действует по программе (см. рис.), отражающей заданный график движения и содержащей граничные условия движения (допустимые скорости V , интенсивности разгона и замедления и т. п.). При движении поезда по пути S автомашинист сравнивает действительное время t
с программным t
и, с учётом граничных условий, с помощью блока 2 меняет режимы Р ведения поезда, выбирая момент или точку пути для перехода от одного режима к другому.
В упрощённых системах функции автоматики ограничены сравнением времени и скорости движения с программными. Результат сравнения в виде отклонения от графика или резерва повышения скорости V сообщается машинисту с помощью табло 3
и 4
, который принимает решение об изменении режима.
Система автомашинист постоянно связана с другими автоматическими системами, участвующими в процессе управления движением. Она воздействует на локомотивную автоматику 5,
выполняющую выбранные ею режимы, и подчиняется командам автодиспетчера 6
и автоблокировки 7. Через автодиспетчер автомашинист взаимосвязан с другими автоматическими системами, выполняющими различные функции на ж/д транспорте.
В перспективе автомашинист будет составной частью комплексной системы автоматического управления участком, дорогой.
Автомашинист является составной частью общей системы управления электропоезда. Он выбирает скорость движения, необходимую для выполнения перегонных времен хода, записанных в его программе с учетом установленных ограничений скорости. Система внутренней автоматики электропоезда реализует выбранную автомашинистом (машинистом при ручном управлении) скорость, регулируя режим работы тяговых двигателей и тормозных средств вагонов.
Автомашинист обеспечивает нормальный режим работы системы внутренней автоматики электропоезда при отсутствии отклонения от графика, ослабленный режим при опережении графика и форсированный режим при обнаруженном опоздании; осуществляет ведение электропоезда в режиме поддержания скорости, которая задается программой или выбирается машинистом с помощью имеющихся на пульте управления кнопок.
Отклонения от графика возникают из-за воздействия на электропоезд изменяющихся внешних условий движения — напряжения контактной сети, сопротивления движению, а также изменений в пределах допустимых значений силы тяги, обусловленных отклонениями режима регулирования или отказом части тягового электрооборудования отдельных вагонов. Поэтому в зависимости от сочетания названных факторов колеблются длина пути и время разгона электропоезда. Эти колебания при нормальной работе тягового электрооборудования могут достигать 15 с при разгоне от 140 до 200 км/ч. Кроме того, из-за возможного отклонения максимальной скорости от среднего значения (200 км/ч) на 5 км/ч возникает отклонение во времени движения примерно 0,5 с на каждый километр пути. Исправление опозданий поезда в пределах 10—15 с выполняют в конце отрезка пути, проходимого с максимальной скоростью, путем изменения предусмотренного программой пути выбега и торможения перед местом ограничения скорости.
В случае задержки поезда система автоматической локомотивной сигнализации непрерывного типа запрещает данному поезду двигаться по графику, т. е. снижает его скорость или останавливает, отменяя воздействие автомашиниста на поезд. Однако основные процессы работы автомашиниста— контроль пройденного пути и времени, оценка отклонения от графика и т.д.- сохраняются для того, чтобы после снятия запрещения, установленного системой безопасности, электропоезд снова мог вписаться в график.
Поездные устройства автоматического регулирования скорости выполняют измерение фактической скорости поезда в диапазоне от 0 до 200 км/ч., сравнивают фактическую скорость с допустимой, определяемой сигнальными показаниями, и выдают сигналы на автоматическое снижение скорости в случае превышения фактической скорости над допустимой. В зависимости от характера поступившей информации приводится в действие либо дисковый тормоз (полное служебное торможение) с интенсивностью не менее 0,6 м/с2 (при сближении, поездов на расстояние менее максимального тормозного пути), либо электрический реостатный тормоз (регулировочное служебное торможение) с интенсивностью не менее 0,3 м/с2 .(при подходе к месту постоянного ограничения скорости с превышением допустимой скорости).
Система автоматически контролирует выполнение автомашинистом команд скорости и независимо от него приводит в действие тормоза в случае превышения допустимых скоростей движения: 20, 50, 80, 120, 146. 106 и 208 км/ч.
Система работает без сбоев, однако управление поездом без участия машиниста все-таки невозможно. Дело в том, что только человек может заметить какие-то "непонятные" для компьютера препятствия на пути или адекватно повести себя в нестандартной ситуации. Машинист в дороге следит за показателями датчиков системы и, собственно, дорогой перед поездом.
Таким образом, человек контролирует автопилот. Одновременно с этим компьютер контролирует человека: машинист закрепляет на руке специальный браслет, которые определяют биоритмы. В том случае, если машинист начинает дремать, система будит его сигналом, а если человек не просыпается - поезд останавливается.
2. Описание конкурирующей технологии.
Интеллектуальный поезд.
Проект «Интеллектуальный поезд» позволяет создать основу автоматизированной системы, состоящей из центрального компьютера, высокоскоростной информационной магистрали, централизованного пульта управления и отображения, вычислительных и аппаратных средств сопряжения в сегментах сети, соответствующих вагонам.
Стандартизация протоколов передачи информации позволяет комплектовать сегменты сети (вагоны) вычислительными средствами необходимой мощности, что позволяет минимизировать стоимость оборудования.
Еще одним несомненным преимуществом стандартизированности решения является возможность установки дополнительных опций. Проектом предусмотрена установка дополнительных средств связи и систем определения местоположения поезда на маршруте (GSM,GlobalStar). При этом возможно дистанционное сопровождение поезда центральным или региональным диспетчером, а также экстренное управление поездом при возникновении нештатных ситуаций. Наличие современных средств связи, подключенных к вычислительной сети поезда, обеспечивает предоставление дополнительных платных услуг пассажирам, таких как телефонная связь из любой точки на маршруте, доступ в Интернет.
Главное направление научной деятельности в области развития железнодорожного транспорта— это создание системы интеллектуального железнодорожного транспорта, который включает в себя интеллектуальный локомотив, интеллектуальный поезд, интеллектуальную станцию и автоматизированную систему управления движением поездов.
Автоматизированная система управления железнодорожным транспортом предназначена для организации централизованного автоматизированного управления движением поездов на линиях РЖД и организации всей производственной деятельности на базе широкого использования современных методов анализа, управления, моделирования, логистики и прогнозирования, а также средств вычислительной техники и информационных технологий.
Система предназначена для обеспечения устойчивого выполнения графика, безопасности движения поездов, повышения пропускной и провозной способности линий, оперативности диспетчерского управления и повышения производительности труда персонала.
Она включает в себя программно-технические и организационно-технологические средства следующих основных интеллектуальных уровней управления:
- диспетчерского управления;
- обеспечения безопасности движения поездов и автоматизированного управления поездами;
- интеллектуального поезда и уровня управления производственно-хозяйственной деятельностью РЖД.
Основными функциями системы являются:
- планирование движения поездов (составление графиков движения поездов) и производственно-хозяйственной деятельности РЖД в автоматизированном режиме;
- отображение в масштабе реального времени положения поездов и состояния технологических процессов;
- оперативное управление в штатных и нештатных ситуациях;
- оперативное диагностирование состояния всех технологических процессов и оборудования;
- прогнозирование рисков и принятие оперативных мер по их устранению;
- централизованное управление проведением аварийно-восстановительных работ при возникновении рисков;
- оперативная связь с другими видами транспорта.
Интеллектуальный поезд включает в себя интеллектуальный локомотив и
интеллектуальные вагоны. Локальная вычислительная сеть интеллектуального поезда объединяет все устройства и системы на поезде с помощью общей информационной шины и обеспечивает управление локомотивным и вагонным оборудованием. В состав локомотивного оборудования входят:
- системы управления тяговым приводом и вспомогательными электрическими цепями;
- системы обеспечения безопасности движения и автоматического управления выполнением графика (автомашинист) с выполнением функций оптимального расхода электроэнергии;
- системы диагностики и регистрации данных;
- системы цифровой связи;
- системы определения продольных динамических усилий;
- системы распределенного управления тормозным оборудованием;
- устройства определения полносоставности поезда и др.
В перспективе интеллектуальные локомотивы должны быть объединены с интеллектуальными вагонами, которые должны включать локальные средства управления всеми узлами вагона — тормозным оборудованием; электрооборудованием, сервисным оборудованием и т.д. Спутниковые технологии должны применяться для позиционирования подвижных объектов и мониторинга систем. Эти технологии должны использоваться совместно со средствами радиосвязи и радиолокационным зондированием объектов железнодорожного транспорта со спутников и определением их координат, а также определением полносоставности поезда. Необходимо разработать технологию интеграции спутникового зондирования в единой системе координатного управления.
3. Сравнение технологий.
| Автомашинист
|
Интеллектуальный поезд
|
| Суть
|
| 1. Автоматическое управление поездами с помощью электронной вычислительной машины.
|
1. Использование единой основы построения поездных и вагонных систем - магистральной информационной сети высокой пропускной способности
|
| 2. Автомашинист выбирает скорость движения, необходимую для выполнения перегонных времен хода, записанных в его программе с учетом установленных ограничений скорости.
|
2. Возможности реализации адресного управления и диагностики состояния тяговых приводов при использовании асинхронных тяговых двигателей
|
| 3. Использование системы автоматического управления торможением (САУТ),что обусловливает более плавное торможение.
|
3. Возможность включения в комплекс: технологических систем (управления освещением, вентиляцией, кондиционированием, водоснабжением), систем обеспечения безопасности пассажиров и персонала (охранной сигнализации, системы контроля доступом, охранного теленаблюдения), систем мониторинга критических параметров (систем с датчиками скорости, температуры, давления, вибраций и т.п.)
|
| 4. Использование устройства контроля бодрствования машиниста (ТСКБМ).Осуществляется путем непрерывного измерения кожно-гальванической реакции машиниста.
|
4.Обеспечение централизованного мониторинга технических средств на уровне вагона (пассажирские вагоны железных дорог) и на уровне состава с обеспечением длительного хранения и эффективной обработки данных
|
| |
| Положительные стороны использования
|
| 1. Успешно справляется с включением и выключением тяговых двигателей именно тогда, когда требуются регулирование скорости, обеспечение заданного времени хода.
|
1.Снижение количества обслуживающего персонала на 40-50%.
|
| 2. Обеспечивается «прицельное торможение».
|
2.Оптимизация управления перевозками за счет прогнозирования движения транспортных потоков
|
| |
3.Повышения объемов перевозок при меньшем количестве подвижного состава за счет его более рационального распределения и производительного использования.
|
| Отрицательные стороны использования
|
| Управление поездом без участия машиниста нежелательно(но возможно), т.к. только человек может заметить какие-то "непонятные" для компьютера препятствия на пути или адекватно повести себя в нестандартной ситуации.
|
4. Пример.
1. Orlyval
— специальная линия метро в Париже, автоматически управляемые поезда которого осуществляют сообщение между аэропортом Орли и станцией экспресс-метро (RER) Antony на линии В. В год перевозится около 2,5 млн пассажиров.
Val обозначает Véhicule automatique léger (лёгкий автоматический поезд). Поезда Orlyval управляются автоматически. Каждый поезд состоит из двух вагонов, передвигающихся на резиновых шинах. Поезда были разработаны компанией Matra в 1971 году и впервые введены в эксплуатацию в Лилле.
2. SkyTrain
— система лёгкого метро в Ванкувере (Канада). Поезда управляются в автоматическом режиме. Самая протяжённая в мире система скоростного транспорта с полностью автоматизированным управлением.
3. Копенгагенский метрополитен
. Одной из отличительных черт Копенгагенского метрополитена является то, что в поездах метро нет машиниста, а управление происходит благодаря полностью автоматизированной системе ATC (от англ. Automatic Train Control). Данная система призвана чётко контролировать расстояние между поездами (из-за точно заданной величины торможения и ускорения). Помимо ATC существует система контроля, регуляции и надзора, в ведении которой находятся питание, вентиляция, охранные сигнализации, система видеонаблюдения. Контроль над системой происходит из Центра управления и технического обслуживания (дат. KVC, от Kontrol og vedligeholdelsescenteret) в Вестамагере.
Заключение.
Новые технологии вождения поездов позволяют наращивать провозную способность железных дорог и получать экономию энергоресурсов на тяге поездов до 5-15 %, значительно облегчают труд машинистов, повышают безопасность движения, открывают пути инновационного развития отрасли. Внедрение интеллектуального поезда и современных систем управления движением поездов и обеспечения безопасности движения на основе комплекса диспетчерского управления по координате поезда, цифровых систем радиосвязи, комплексных систем диагностики, единого комплекса управления. Созданные структуры обеспечивают внедрение комплекса интеллектуальных систем автоматического управления движением поезда в эксплуатацию и перевод на него отечественного парка электровозов, электро- и дизель-поездов. Значимость новых технологий вождения поездов весьма высока. Годовой экономический эффект только за счет экономии электроэнергии составил за 2004-2005 гг. более 140 млн. руб.
Список литературы.
1.http://www.css-rzd.ru/vestnik-vniizht/v2002-5/v3-3.htm
2.http://www.zdt-magazine.ru/publik/techsredstva/2006/aprel-06-04_1.htm
3.http://www.optima.ru/solution/29/207/
4.http://www.webplanet.ru/news/life/2009/08/14/pilot.html
5.http://www.metro.ru/library/metropoliteny/246/
6.http://ru.wikipedia.org/wiki/SkyTrain
7.http://ru.wikipedia.org/wiki/SkyTrain_(Ванкувер)
8.http://dic.academic.ru/dic.nsf/bse/61330/
9.http://slovari.yandex.ru/~~книги/БСЭ/Автомашинист/
10.http://www.vesti-moscow.ru/rnews.html?id=58700
11.http://www.mk.ru/social/article/2010/07/27/519223-vyisokoskorostnyimi-poezdami-budet-upravlyat-avtopilot.html
12. http://www.css-rzd.ru/zdm/04-2002/01236.htm
13. http://www.avp-t.ru/node/91
14. http://www.intcity.org/ai_train.htm
15. http://www.eav.ru/publ1.php?publid=2010-05a13
16. http://ru.wikipedia.org/wiki/Orlyval
|
