| Федеральное агентство по образованию Российской федерации
Государственное образовательное учреждение высшего профессионального образования
Волгоградский государственный технический университет
Кафедра «Металлорежущие станки и инструменты»
Отчет по учебной практике
Выполнила:
Студентка гр. ТОА – 225
Аросия Л.М.
Проверил:
Доцент кафедры СИ
Ольштынский С.Н.
Волгоград 2010
Содержание
Введение
Глава 1. Токарно-револьверный одношпиндерный прутковый 1Б140
Глава 2. Горизонтально-расточной станок 2А620Ф2
Глава 3. Вертикально-сверлильный станок 2А135
Глава 4. Режущий инструмент
Заключение
Список использованной литературы
Введение
Вся история техники представляет собой борьбу за постепенное освобождение человека от непосредственного участия в процессе производства. Производственные функции, выполняемые человеком в процессе труда, распределяются на четыре основные группы: 1) энергетические (приложение усилий для выполнения работы); 2) технологические (использование орудий труда для изменения формы, состава, структуры предмета труда); 3) функции управления рабочей машиной и 4) контрольно-регулирующие (контроль, регулирование, программирование процесса). Первые три группы функций должны осуществляться человеком при каждом рабочем цикле, т. е. при изготовлении каждого изделия, а контрольно-регулирующие функции являются внецикловыми и могут осуществляться лишь периодически. Замена непосредственных производственных функций человека техническими средствами – закон развития производительных сил.
Каждый раз, когда происходит интенсивная замена тех или иных функций человека в процессе труда техническими средствами, наблюдаются коренные сдвиги в развитии производительных сил, что свидетельствует о технической революции.
В процессе прохождения практики изучила и ознакомилась со станками как: токарно-винторезные, Вертикально фрезерные, Горизонтально фрезерные, Вертикально сверлильные, настольно сверлильные, поперечно строгальные и точильно-шлифовочные станки. Отдельный были выбраны ряд станков и составлен данный отчет.
Первый станок:
токарно-револьверный одношпиндерный прутковый 1Б140
в процессе изучения данного станка узнала назначение и применение, основные данные и в каких производствах используется
Второй станок:
горизонтально-расточной станок 2А620Ф2, в процессе изучения данного станка узнала назначение и применение, основные данные и в каких производствах используется
Третий станок:
ВЕРТИКАЛЬНО-СВЕРЛИЛЬНЫЙ СТАНОК 2А135
Реклама

Станок предназначен для сверления, рассверливания, зенкерования, развёртывания отверстий, а также для нарезания резьбы метчиками.
В процессе изучения данного станка узнала назначение и применение, основные данные и в каких производствах используется
Так же были изучены РЕЖУЩИЕ ИНСТРУМЕНТЫ.
Отдельно ознакомилась со СТЕРЖНЕВЫМИ РЕЗЦАМИ, узнала для чего предназначены, и из каких материалов сделаны.
Глава 1 токарно-револьверный
одношпиндерный
прутковый 1Б140
На рис. 1.1 приведен автомат токарно-револьверный одношпиндерный прутковый 1Б140

Рис.1.1 автомат токарно-револьверный одношпиндерный прутковый 1Б140
Таблица 1.1 техническая характеристика станка
| масса
|
2300
|
| размер
|
1900_890_1500
|
| мощность
|
7
|
| макс. скорость шпинделя
|
2500
|
| мин. скорость шпинделя
|
160
|
| Наибольшая длина подачи прутка, мм
|
100
|
| Наибольший диаметр обрабатываемого прутка, мм
|
40
|
Автомат токарно-револьверный одношпиндерный прутковый 1Б140 Автомат предназначен для токарной обработки сложных и точных деталей из калиброванного холоднотянутого прутка круглого, шестигранного и квадратного сечения или из труб в условиях серийного производства. Значительную долю станочного парка составляют станки токарной группы. По классификации токарные станки относятся к 1-й группе. Она включает девять типов станков, отличающихся по назначению, конструктивной компоновке, степени автоматизации и другим признакам. На токарных станках обрабатывают детали типа валов, дисков и втулок, осуществляя обтачивание наружных цилиндрических поверхностей, торцов и уступов, прорезание канавок и отрезку, растачивание отверстий (цилиндрических, конических и фасонных), обтачивание конических и фасонных поверхностей, сверление, зенкерование и развертывание отверстий, нарезание наружной и внутренней резьбы резцом, нарезание резьбы метчиком и плашкой, вихревое нарезание резьбы, накатывание рифленых поверхностей. Главным движением токарного станка, определяющим скорость резания, является вращение шпинделя, несущего заготовку. Движением, определяющим величины продольных и поперечных подач, является движение суппорта, в котором закрепляют резцы, а при обработке концевым инструментом движение подачи получает задняя бабка токарного станка. Токарные станки, полуавтоматы и автоматы, в зависимости от расположения шпинделя, несущего приспособление для установки заготовки обрабатываемой детали, делятся на горизонтальные и вертикальные. Вертикальные токарные станки предназначены в основном для обработки деталей значительной массы, большого диаметра и относительно небольшой длины. Применение на токарных станках дополнительных специальных устройств (для шлифования, фрезерования, сверления радиальных отверстий и других видов обработки) значительно расширяет технологические возможности оборудования.
Реклама

Одношпиндерный токарно–револьверный автомат модели 1Б140.
Автоматами называют такие станки, на которых после их наладки все движения, связанные с циклом обработки детали, а также загрузка заготовки и выгрузка обработанной детали выполняются без участия рабочего. На полуавтоматах установку новой заготовки и снятие готовой детали выполняет рабочий. Токарные автоматы и полуавтоматы могут быть универсальные и специализированные, горизонтальные и вертикальные, одно и многошпиндельные. Одношпиндельные прутковые токарные автоматы подразделяют на револьверные, фасонно-отрезные и фасонно-продольные. В универсальном исполнении Одношпиндельные токарно-револьверные автоматы имеют шестипозиционную револьверную головку и поперечные суппорты. На токарно–револьверном автомате 1Б140 (см рис) в условиях крупносерийного и массового производства обрабатывают сложные по форме детали с применением нескольких последовательно или параллельно работающих инструментов.
Характеристика станка. Наибольший диаметр обрабатываемого прутка 40 мм; наибольший диаметр нарезаемой резьбы: в стальных деталях М24, в деталях из латуни М32; наибольшая длина подачи прутка за одно включение 100 мм; наибольший ход револьверной головки 100мм; время изготовления одной детали 10,1 – 608,3 с; пределы частот вращения шпинделя: при левом вращении 160 – 2500 об/мин; при правом 63-1000 об/мин; наименьшее и наибольшее расстояние от торца шпинделя до револьверной головки 75-210 мм; мощность электродвигателя 5,5 кВт; габаритные размеры 1900ґ 890ґ 1500 мм.
Принцип работы станка. Обрабатываемый пруток пропускают через направляющую трубу и закрепляют в шпинделе станка цанговым зажимом. Инструмент закрепляют в револьверной головке, поперечных и на продольном суппортом. Инструментами револьверной головки протачивают наружные поверхности, обрабатывают отверстия и нарезают резьбу, инструментами поперечных суппортов обрабатывают фасонные поверхности, подрезают торцы, снимают фаски и отрезают готовые детали, а инструментом продольного суппорта производят точение конусов и другие операции. Предназначен для изготовления в массовом и крупносерийном производстве деталей, требующих обтачивания, подрезания торцов, сверления, зенкерования, нарезания резьбы и т. п. Загрузка нового прутка длиной до 3000 мм осуществляется вручную, а в процессе работы автомата подача и зажим прутка, как и другие холостые и рабочие ходы, осуществляются автоматически.
Револьверная головка 5 с шестью гнездами для инструментов имеет горизонтальную поперечную ось поворота в револьверном суппорте 7. Суппорт имеет продольную рабочую подачу sГ
и может быстро отводиться от заготовки после завершения перехода обработки для смены инструмента в гнезде путем поворота головки на 1/6 часть оборота.
С четырех суппортов — двух горизонтальных 1
и двух вертикальных 4 —
можно обрабатывать заготовки с поперечной подачей snon
.
На переднем горизонтальном поперечном суппорте 1
расположен продольный суппорт, который может перемещаться под углом до 90о
к направлению движения переднего суппорта. Вращательное движение резания получает заготовка 2, зажатая в цанговый патрон и проходящая внутри шпинделя.
Привод шпинделя осуществляется от электродвигателя через клиноременную передачу и коробку скоростей с электромагнитными муфтами. Автоматическое изменение частоты вращения шпинделя осуществляется командоаппаратом через электромуфту и муфту обгона в коробке скоростей.
Точение и сверление на автомате производится при левом вращении шпинделя. Все целевые узлы и механизмы станка управляются от вспомогательного вала (с задней части станка) и распределительного вала, приводимых во вращение от отдельного электродвигателя через червячную пару. При настройке вращение осуществляется от маховика 8.
Автомат оснащен системой циклового программного управления, позволяющей программировать частоту вращения шпинделя, включение электродвигателя привода приспособлений и торможение шпинделя.
На рис. 1.2 приведена кинематическая схема одношпиндельного токарно-револьверного автомата.

Рис.1.2 Кинематическая схема одношпиндельного токарно-револьверного автомата
Обработка деталей ведется с револьверного и поперечных суппортов. По ходу технологической операции необходимо: подать пруток до упора и зажать его, менять в рабочей позиции инструмент револьверной головки, осуществлять резание инструментом револьверного и поперечного суппортов и отводить их после выполнения обработки, реверсировать шпиндель станка и т. п. Для осуществления этих действий автомат имеет соответствующие механизмы и устройства, а также вспомогательный и распределительный валы. По кинематической схеме проследим работу цепи привода вращения вспомогательного VII
и VIII
и распределительного XV и XVI
валов от отдельного электродвигателя М2
через червячную передачу на вал VI
и муфту 72. Выключение этой муфты позволяет вращать вспомогательный вал VII
и VIII
вручную маховиком 30,
что необходимо при настройке станка. Постоянная частота вращения этого вала 2 об/с.
1. От червячной передачи 24 — 25 вращение получает командоаппарат 26,
управляющий направлением и частотой вращения шпинделя путем переключения электромагнитных муфт в коробке скоростей и включением электродвигателя МЗ
привода специальных приспособлений в одной из позиций револьверной головки.
2. 2. Муфты 73
и 74
управляют барабанами 92
и 86
механизмов подачи и зажима прутка. Чтобы обеспечить эти действия (один раз за время обработки одной заготовки), муфты при включении их от упоров на барабанах 79
и 81
делают точно один (муфта 73) или точно два (муфта 74)
оборота. На поворачивающихся барабанах 92
и 86
имеются профилированные пазы, перемещающие рычаги, которые приводят в соответствующее осевое согласованное движение обе цанги — подающую пруток и зажимную.
3. Звездочка 55 цепной передачи 23 — 55 приводит в движение шнековый транспортер для уборки стружки.
4. Муфта 75 при включении от упора на барабане 80
распределительного вала делает точно два оборота. При этом по цепочке колес 36—37—38 —39—40 через мальтийский механизм 41—42
произойдет поворот револьверной головки на 1/6 оборота для введения в рабочую позицию нового инструмента или набора инструментов в державке.
5. Через муфту получает вращение- вторая-часть вспомогательного вала — вал VIII с
маховнком 30 и колесами 31
и 52. От них распределительные валы — поперечный XV
и продольный XVI —
могут “получать” медленное рабочее (от колеса 32)
или быстрое холостое (от колеса 31
) вращение.
На поперечном распределительном валу XV
расположены: кулачок 93
продольной подачи револьверного суппорта, червяк 45,
барабан 90
приемного лотка готовых деталей и барабан 91,
управляющий муфтой 76
частоты вращения распределительного вала. На продольном распределительном валу XVI,
кроме упомянутых элементов, расположены (слева направо): цилиндрический кулачок 78
подачи продольного суппорта и четыре дисковых кулачка 82 — 85
поперечной по дачи четырех суппортов. На период подачи прутка и его зажима может подводиться от кулачка 88
на валу XVIII
качающийся упор. Он используется для установки жесткого упора при отсутствии свободной позиции револьверной головки.
На рис. 1.3 приведен револьверный суппорт токарно-револьверного автомата.

Рис. 1.3 Револьверный суппорт токарно-револьверного автомата.
Револьверный суппорт получает рабочую подачу от кулачка 7 через зубчатый сектор 10
и рейку 9.
При этом пружина в
постоянно отжимает суппорт вправо, поджимая ролик толкателя 8
к кулачку. Для смены рабочей позиции головки 13
необходимо быстро отвести суппорт вправо, что обеспечивается кривошипным механизмом 12, 11.
В самом начале поворота кривошипа кулачок 3
через рычаг 5
выводит из гнезда фиксатор 4,
позволяя осуществить поворот револьверной головки мальтийским механизмом (крест 1,
водило 2). Весь суппорт с широким зубчатым колесом получает возвратно-поступательное движение относительно неподвижного в осевом направлении колеса z =
84. После смены рабочей позиции головки и подвода нового инструмента к заготовке инструмент начинает резание за счет перемещения револьверного суппорта от кулачка 7.
Глава 2.
Горизонтально-расточной станок 2А620Ф2
Технологические возможности станка
Станок предназначен для консольной обработки крупных заготовок с точными отверстиями, оси которых связаны между собой точными размерами. На нем можно растачивать, сверлить, зенкеровать и развертывать отверстия, нарезать наружную и внутреннюю резьбы, цековать и фрезеровать поверхности. Класс точности станка Н. Коробчатая форма всех корпусных деталей станка с ребрами жесткости, конструкция шпинделя с прецизиционными подшипниками обеспечивает высокую жесткость и виброустойчивость станка. Применяется в условиях единичного и мелкосерийного производства. На рис. 2.1 горизонтально-расточной станок 2А620Ф2

Рис. 2.1 Горизонтально-расточной станок 2А620Ф2
Таблица 2.1-Технические характеристики
| Размеры рабочей поверхности стола, мм:
|
Параметры
|
| ширина
|
1120
|
| длина
|
1250
|
| Диаметр выдвигаемого шпинделя, мм:
|
90
|
| Число частот вращения мин-1
:
|
|
| шпинделя
|
23
|
| планшайбы
|
15
|
| Пределы частот вращения, мин-1
:
|
|
| шпинделя
|
10-1500
|
| планшайбы
|
6,3-160
|
| Пределы подач (бесступенчатое регулирование), мм/мин:
|
|
| шпиндельной бабки и стола
|
1,25-12500
|
| выдвижного шпинделя
|
2-2000
|
| радиального суппорта
|
0,8-800
|
| Габаритные размеры, мм:
|
|
| длина
|
6070
|
| ширина
|
3970
|
| высота
|
3200
|
Устройство и принцип работы станка
На рис.2.2 Схема горизонтально-расточного станка 2А620Ф2

Рис 2.2 Схема горизонтально-расточного станка 2А620Ф2
Станок имеет неподвижную переднюю стойку 4 и встроенный поворотный стол 2 с продольным и поперечным перемещением. Передняя стойка и стол расположены на станине 1. По вертикальным направляющим стойки 4 может перемещаться шпиндельная бабка 5. Станок выполнен с нормальным выдвижным шпинделем 3 и радиальным суппортом, расположенным на планшайбе станка. Шпиндельный узел смонтирован на прецизионных подшипниках качения, которые обеспечивают длительное сохранение точности, повышенную жесткость и виброустойчивость. Станок имеет раздельные электрические приводы для перемещения шпиндельной бабки и поперечного перемещения стола. Направляющие станины и салазок стола имеют телескопические защитные устройства.
На рис. 2.3 Компоновка станка 2А620Ф2

Рис 2.33 Компоновка станка 2А620Ф2
Инструмент крепится в шпиндель или в суппорте Д планшайбы и получает главное вращательное движение. Обрабатываемую заготовку устанавливают на столе Б, перемещающемся в продольном W (подача S1) и поперечном по оси Х (S2) направлениях. Стол имеет еще круговую подачу S3. На станине A закреплена стойка B, по направляющим которой перемещается шпиндельная бабка Г по оси Y (подача S4). Расточной шпиндель получает поступательное перемещение по оси Z (подача S5), а суппорт Д имеет радиальную подачу S6. Сверление, зенкерование, растачивание, нарезание резьбы осуществляют подачей S5, фрезерование по восьми- угольному контуру – одновременно подачами S2 и S4, а также фрезерованием с круговой подачей S3. Длинные отверстия удобнее растачивать при продольном перемещении стола (подача S1). При работе планшайбой (подача S6) можно производить обтачивание торцов суппортом, проточку канавок и выступов, растачивание отверстий больших диаметров.
На рис. 2.4 Расположение осей координат в станках с ЧПУ (а); правосторонняя система координат (б)
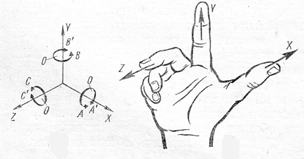
Рис 2.4 Расположение осей координат в станках с ЧПУ (а); правосторонняя система координат (б)
Для станков с ЧПУ стандартизованы направления перемещений и их символика. Стандартом ISO-R841 принято за положительное направление перемещения элемента станка считать то, при котором инструмент или заготовка отходят друг от друга. Исходной осью (ось Z) является ось рабочего шпинделя. Если эта ось поворотная, ее положение выбирают перпендикулярно плоскости крепления детали. Положительное направление оси Z – от устройства крепления детали к инструменту. Оси Х, Y, Z называются первичными и расположены ближе к шпинделю. Вторичные оси U, V, W параллельны первичным. Углы поворота вокруг первичных осей обозначаются А, В, С (соответственно для поворота вокруг осей Х, Y, Z). Положительным направлением считается вращение по часовой стрелке при взгляде вдоль положительного направления соответствующей оси. При перемещении детали (а не инструмента) положительные значения изменяют направление, их обозначают буквами Х’, Y’, Z’ и т.д.
Кинематика станка
На рис. 2.5 Кинематическая схема горизонтально-расточного станка 2А620Ф2

Рис 2.5 Кинематическая схема горизонтально-расточного станка 2А620Ф2
Главное движение шпиндель VII получает от эл. двигателя М1 (N = 1,1 кВт, n = 1600 мин-1
) через передачи z = 36-36 (включена муфта М1) или z = 32-40 (включена муфта М2), упругую муфту на валу III, защищающую от динамического воздействия, блоки зубчатых колес Б1 и Б2. С вала VI на шлицевой вал VIII и соответственно на шпиндель VII движение передается через передачу z = 30-86 при включенной муфте М3 или через колеса z = 47-41 при включенной муфте. В первом случае получают нижний диапазон частот вращения, во втором – верхний. В результате переключения муфт М1, М2, М3 и блоков Б1 и Б2 шпиндель имеет 36 теоретических и 23 практических значения частот вращения. Уравнение кинематического баланса для минимальной частоты вращения шпинделя:
nmin = 1600 ∙ 32/40 ∙ 18/72 ∙ 19/60 ∙ 19/61 ∙ 20/86 = 10 мин-1
Планшайба получает вращение по аналогичной кинематической цепи, но с вала VI на вал IX планшайбы движение передается через передачу z = 21-92 при включении муфты М4. При одной и той же наладке частота вращения планшайбы в 1,58 раза меньше частоты вращения шпинделя. Шпиндельное устройство состоит из расточного и полого фрезерного шпинделя. Фрезерный шпиндель смонтирован в прецизионных подшипниках; расточной шпиндель, изготовленный из азотированной стали, перемещается внутри термически обработанных втулок; запрессованных во фрезерном шпинделе. В расточном шпинделе зажим инструмента механизирован. Движение подачи осуществляется от двигателей постоянного тока М2 и М3 (N = 3,8 кВт, n = 2200 мин-1
) с тиристорным управлением (диапазон регулирования 1:1000). Подвижные механизмы имеют высокочастотные закаленные боковые направляющие качения и закрепляются автоматически. От двигателя М2 через редуктор получают осевое перемещение шпиндель, радиальное перемещение шпиндель, радиальное перемещение суппорт планшайбы, вертикальное перемещение шпиндельная бабка и продольное перемещение стол, от двигателя М3 – поперечное перемещение и поворот стол. Продольное перемещение стола осуществляется парой винт-гайка качения XIV, получающий вращение от вала X через передачи z = 22-62, 25-49, 49-39 при включенной муфте М5. Вертикальное перемещение шпиндельная бабка получает от двигателя М2 через передачи z = 22-62, z = 40-32, z = 58-64 (при включенной муфте М13), z = 40-48, z = 41-47-47 и пару винт-гайка качения XXXVI с шагом Рх.в = 10 мм.
Уравнение кинематической цепи для вертикальной подачи:
Sверт = nдв 22/62 ∙ 40/32 ∙ 58/64 ∙ 40/48 ∙ 41/47 ∙ 47/47 ∙ 10 мм/мин.
Для предотвращения падения шпиндельной бабки при обрыве троса противовеса имеется специальный механизм на валу XXXIV.
Осевая подача шпинделя осуществляется от вала 10 через передачи z = 22-62, z = 40-32, z = 4-29, вал XIX, муфту М10, зубчатые пaры z = 44-16, z = 32-31 и передачу винт-гайку качения XXVI.
Уравнение кинематической цепи для минимальной осевой подачи:
Sос = nдв 22/62 ∙ 40/32 ∙ 4/29 ∙ 44/16 ∙ 32/31 ∙ 10 мм/мин.
Нарезание резьбы можно осуществлять или вращением шпинделя с одновременным продольным перемещением его, или радиальным суппортом планшайбы при продольном перемещении стола. В обоих случаях нужный шаг резьбы получают подбором сменных колес а, b, c, d.
1об.шп. 86/30 ∙ 67/94 ∙ а/ b ∙ с/ d ∙ 18/36 ∙ 4/29 ∙ 44/16 ∙ 32/31 ∙ 10 = Рн.р
откуда а/ b ∙ с/d = Рн.р/4, где Рн.р – шаг нарезаемой резьбы.
Радиальное перемещение суппорта планшайбы осуществляется через дифференциальный механизм. Корпус дифференциала вращается от вала IX планшайбы через косозубую передачу z = 92-21, а центральное зубчатое колесо дифференциала
z = 16 валу XXI получает вращение от привода вала Х через передачи z = 22-62, z = 40-32, z = 4-29, z = 64-50 (при включенной муфте М8). Дифференциал, суммируя оба эти движения, вращает вал XXIII и
через передачи z = 35-100, z = 100-23 – вал XXIV, коническую пару z = 17-17 и червячно-реечную передачу перемещается радиальный суппорт планшайбы. Дифференциальный механизм обеспечивает перемещение суппорта во время вращения планшайбы с разными значениями подачи.
По формуле Виллиса определим передаточное число дифференциала
n1 –n0 /n4 -n0 = z2 /z1 ∙ z4 /z3 ∙ (-1)m
.
В данном случае n1, n4 и n0 – соответственно частоты вращения валов XXI, XXIII и поводка XXII с зубчатым колесом z = 21, числа зубьев колес в дифференциале z1 = 16, z2 = 32, z3 = 16, z4 = 23. Таким образом, n1 –n0 /n4 -n0 = 32/16∙ 23/16 = 23/8.
Уравнение кинематической цепи радиальных подач в общем виде
Sрад = nдв 22/62 ∙ 40/32 ∙ 4/29 ∙ 64/50 ∙ 8/23 ∙ 35/100 ∙ 100/23 ∙ 17/17 ∙16 мм/мин.
Поперечное перемещение стола происходит от эл.двигателя М3 через передачи z = 24-82-82 при включенной муфте М15 и винт-гайку качения Р = 10 мм.
На рис.2.6 Привод радиального суппорта станка 2А620Ф2

Рис 2.6 радиального суппорта станка 2А620Ф2
Круговая подача стола осуществляется от эл.двигателя М3 при включении муфты М17 через передачи z = 24-82-82-52, z = 2-35, z = 13-188. Во всех цепях подач имеются тормозные электромагнитные муфты (М5, М11, М12, М14, М16, М18).
Быстрое перемещение рабочих органов происходит от двигателей М2 и М3 при разгоне до соответствующей частоты вращения.
Штурвальное устройство 1 позволяет осуществлять ручное тонкое перемещение шпинделя, радиального суппорта, шпиндельной бабки и продольное перемещение стола при включении муфты М7, а также быстрое перемещение выдвижного шпинделя при включении М9. Лимбы отсчета перемещений шпинделя 3 и радиального суппорта 2 кинематически связаны с приводом подач шпинделя и радиального суппорта. Муфта обгона М0 на валу XVIII отключает вращение штурвала 1 при механических подачах.
привод радиального суппорта 1 станка. Суппорт с червячной рейкой 9 получает перемещение через зубчатые колеса 3, 2, винт 4 и червяк 5, состоящий из двух частей.
Осевой зазор между червяком и рейкой устраняют путем сближения частей червяка регулировочным винтом 8. Для этого предварительно с помощью винта 6 освобождается винт 7. Зазор регулируют, а затем фиксируют требуемое положение винта 8.
Глава 3
ВЕРТИКАЛЬНО-СВЕРЛИЛЬНЫЙ СТАНОК 2А135
На рис.3.1 ВЕРТИКАЛЬНО-СВЕРЛИЛЬНЫЙ СТАНОК 2А135

Рис3.1 ВЕРТИКАЛЬНО-СВЕРЛИЛЬНЫЙ СТАНОК 2А135
Станок предназначен для сверления, рассверливания, зенкерования, развёртывания отверстий, а также для нарезания резьбы метчиками.
Таблица 3.1 Технические характеристики 2А135
| Условный диаметр сверления
|
35 мм
|
| max допустимое усилие подачи
|
1600 кг
|
| Электродвигатель
|
2870 об/мин
|
| max глубина сверления
|
225 мм
|
| max вертикальное перемещение салазок шпинделя
|
200 мм
|
| max вертикальное перемещение ствола
|
325 мм
|
| Вес
|
1415 кг
|
| Габариты
|
1240х810х2563 мм
|
ВЕРТИКАЛЬНО-СВЕРЛИЛЬНЫЙ СТАНОК 2А135
Общая характеристика станка
Назначение станка.
Станок предназначен для сверления, рассверливания, зенкерования и развертывания отверстий в различных деталях, а также для торцевания и нарезания резьб машинными метчиками в условиях индивидуального и серийного производства. На станке модели 2А135 обрабатываются детали сравнительно небольших размеров и веса.
Техническая характеристика станка
· Наибольший диаметр сверления в мм - 35
· Расстояние от оси шпинделя до лицевой стороны станины в мм -300
· Наибольшее расстояние от торца шпинделя до стола в мм -750
· Наибольший ход шпинделя в мм - 225
·Наибольшее установочное перемещение шпиндельной бабки в мм - 200
· Размеры рабочей поверхности стола в мм:
длина - 500
ширина - 450
· Наибольшее вертикальное перемещение стола в мм - 325
· Число скоростей вращения шпинделя - 9
· Пределы чисел оборотов шпинделя в минуту 68-1100
· Количество величин подач - 11
· Пределы величин подачи в мм/об .0,115--1,6
· Мощность главного электродвигателя в кВт 4,5
Основные узлы станка А
-- стол; Б
-- шпиндельная бабка с коробкой подач и подъемным механизмом; В
-- коробка скоростей; Г
-- станина (колонна); Д
-- основание станины. Органы управления.
1
-- рукоятка перемещения стола; 2
-- штурвал для подъема и опускания шпинделя и для включения механической подачи. Движения в станке. Движение резания -- вращение шпинделя с режущим инструментом. Движение подачи -- осевое перемещение шпинделя с режущим инструментом. Вспомогательные движения -- ручные перемещения стола и шпиндельной бабки в вертикальном направлении и быстрое ручное перемещение шпинделя вдоль его оси. Принцип работы.
Обрабатываемая деталь устанавливается на столе станка и закрепляется в машинных тисках или в специальных приспособлениях. Совмещение оси будущего отверстия с осью шпинделя осуществляется перемещением приспособления с обрабатываемой деталью на столе станка. Режущий инструмент в зависимости от формы его хвостовика закрепляется в шпинделе станка при помощи патрона или переходных втулок. В соответствии с высотой обрабатываемой детали и длиной режущего инструмента производится установка стола и шпиндельной бабки. Отверстия могут обрабатываться как ручным перемещением шпинделя, так и механической подачей. Конструктивные особенности. Станок обладает высокой жесткостью, прочностью рабочих механизмов, мощностью привода и широким диапазоном скоростей резания и подач, позволяющим использовать режущий инструмент, оснащенный твердым сплавом. Наличие электрореверса, управляемого как автоматически, так и вручную, обеспечивает возможность нарезания резьбы при ручном подводе и отводе метчика. В конструкции вертикально-сверлильного станка модели 2А135 предусмотрено автоматическое включение движения подачи после быстрого подвода режущего инструмента к обрабатываемой детали и автоматическое выключение подачи при достижении заданной глубины сверления. Заданная глубина сверления несквозных отверстий обеспечивается специальным механизмом останова с упором. Этот механизм является одновременно предохранительным устройством, предохраняющим механизм подач от поломок при перегрузках. Шпиндель станка смонтирован на прецизионных подшипниках качения. Нижняя опора состоит из радиального шарикового подшипника класса АВ. В верхней опоре установлен один шариковый подшипник класса В. Заводом предусмотрена возможность смены приводных шкивов клиноременной передачи, что позволяет устанавливать пределы чисел оборотов шпинделя в соответствии с технологическими задачами. Для сокращения вспомогательного времени на станке модели 2А135 обеспечена возможность включения и выключения подачи тем же штурвалом, который осуществляет ручное быстрое перемещение шпинделя. Модели вертикально-сверлильных станков.
На машиностроительных заводах получили распространение следующие модели вертикально-сверлильных станков: 2118, 2118А, 2Б118 для сверления отверстий в мягкой стали диаметром до 18 мм;
2125 и 2А125 для сверления отверстий диаметром до 25 мм;
2135, 2А135 для сверления отверстий диаметром до 35 мм;
2150, 2А150 и 2170 для сверления отверстий диаметром соответственно до 50 и 70 мм.
Выпущен станок модели 2Н135А.
Кинематика станка модели 2AI35
Движение резания. Шпиндель V
(рис. 8) приводится в движение электродвигателем мощностью 4,5 кВт
через клиноременную передачу 140
--178
и коробку скоростей.
На валу I
коробки скоростей находится тройной подвижной блок шестерен Б1
,
обеспечивающий валу II
три скорости вращения. От вала II через шестерни 34--48
вращение передается валу III
, на котором расположен тройной подвижной блок шестерен Б2
,
приводящий в движение полый вал IV,
связанный шлицевым соединением со шпинделем V.
Как видно из графика (рис.8), шпиндель V
имеет девять скоростей вращения. Наибольшее число оборотов шпинделя nmax
с учетом упругого скольжения ремня определяется из выражения Движение подачи. Движение подачи заимствуется от шпинделя V.
Движение передается через шестерни 27
--50
и 27
--50,
коробку подач с выдвижными шпонками, предохранительную муфту М1
вал IX,
червячную передачу 1--47,
зубчатую муфту М2
,
вал X
и реечную передачу гильзе шпинделя. В коробке подач расположены трех- и четырехступенчатый механизмы с выдвижными шпонками. От вала VI
три скорости вращения сообщаются валу VII,
на котором жестко закреплены шестерни 60, 56, 51, 35
и 21.
От вала VII
четыре скорости вращения передаются валу VIII.
Теоретически коробка подач обеспечивает 12 скоростей вращения, однако, как видно из графика), одна из них повторяющаяся, поэтому станок модели 2А135 имеет только 11 различных величин подач.
От вала VIII
через кулачковую муфту М1
движение сообщается валу IX,
на котором закреплен червяк. Червячное колесо 47
расположено на одном валу с реечной шестерней 14,
находящейся в зацеплении с рейкой, нарезанной на гильзе шпинделя. Муфта М1
служит для предохранения механизма подач от поломок при перегрузках, а также для автоматического выключения подачи при работе по упорам.
Наибольшая величина подачи smax
определяется из выражения Вспомогательные движения. Перемещение шпиндельной бабки осуществляется от рукоятки Р1
через червячную передачу 1--32
и реечную шестерню 18,
сцепляющуюся с рейкой т
= 2 мм,
закрепленной на станине. Вертикальное перемещение стола достигается поворотом рукоятки Р2
через вал XI,
конические шестерни 16--43
и ходовой винт XII.
Быстрое перемещение шпинделя с гильзой производится штурвалом Ш,
связанным специальным замком с валом X.
Замок позволяет штурвалу свободно поворачиваться на валу X
в пределах 20°, а в дальнейшем связывает их в одно целое.
Спиральное сверло
Сверла - это осевые режущие инструменты, предназначенные для образования отверстий в сплошном материале, а также для обработки (рассверливания) отверстий, предварительно изготовленных ковкой, штамповкой, литьем или сверлением. Они широко применяются в машиностроении, занимая по этому признаку второе место после резцов. Кинематика процесса сверления состоит из двух движений: главного - вращательного вокруг оси инструмента (заготовки), поступательного - движения подачи вдоль той же оси. По конструктивному исполнению сверла отличаются большим разнообразием, которое можно свести к следующим основным типам: перовые (лопаточные); спиральные (с винтовыми канавками); специальные (для сверления глубоких отверстий, кольцевые, комбинированные и др.). В качестве материала рабочей части в основном используются быстрорежущие стали и прежде всего сталь марки Р6М5. В последние годы в нашей стране и особенно за рубежом в больших объемах выпускаются различные конструкции сверл, оснащенных твердыми сплавами. Спиральные или, правильнее, винтовые, сверла были впервые показаны на Всемирной торговой выставке в 1867 г. американской фирмой Морзе. До настоящего времени основные особенности их конструкции сохранились практически неизменными. Из всех известных конструкций сверл спиральные сверла нашли наибольшее применение благодаря следующим достоинствам:
1) хорошему отводу стружки из обрабатываемого отверстия из-за наличия винтовых канавок;
2) положительным передним углам на большей длине главных режущих кромок;
3) большому запасу на переточку, которая производится по задним поверхностям и может выполняться вручную или на специальных заточных станках, в том числе станках-автоматах;
4) хорошему направлению сверла в отверстии из-за наличия калибрующих ленточек на наружной поверхности калибрующей части инструмента.
Основные конструктивные элементы и геометрические параметры спиральных сверл. На конической режущей части с углом 2.
при вершине расположены две главные режущие кромки - линии пересечения винтовых передних и задних поверхностей. Форма задних поверхностей определяется методом заточки. В результате пересечения двух задних поверхностей образуется поперечная режущая кромка, наклоненная к главной режущей кромке под углом.Эта кромка располагается на сердцевине сверла с условным диаметром d0
=(0,15...0,25)d, где d - диаметр сверла. Две вспомогательные режущие кромки лежат на пересечении передних поверхностей и цилиндрических калибрующих ленточек, направляющих сверло в отверстии и образующих калибрующую часть сверла. Угол наклона вспомогательных кромок к оси сверла ? определяет в основном величину передних углов .на главных режущих кромках, которые, как будет показано ниже, переменны по величине в разных точках этих кромок. Режущая и калибрующая части сверла составляют его рабочую часть, по длине которой сверла делятся на короткую, среднюю и длинную серии. Стандартные спиральные сверла изготавливают диаметром 0,1...80 мм с допусками по А8...А9. За рабочей частью стерла следует шейка, которая используется для нанесения маркировки сверла: диаметра, материала режущей части, товарного знака завода-изготовителя. Хвостовики бывают двух типов: конические с лапкой на конце для сверл d = 6...80 мм и цилиндрические для сверл d=0,1...20 мм. У сверл d > 8 мм хвостовики делают из конструкционной стали 45 или 40Х, свариваемой с рабочей частью. Для увеличения силы трения в месте крепления сверла в патроне и возможности правки сверл по длине хвостовики термически не обрабатывают. Лапки сверл для упрочнения закаливают, так как они используются для выбивания сверл из отверстия шпинделя станка или из переходной втулки. Геометрические параметры спиральных сверл. Спиральные сверла имеют сложную геометрию режущей части, что объясняется наличием большого числа кромок и сложных по конфигурации передних и задних поверхностей. Угол при вершине 2
, который играет роль главного угла в плане. У стандартных сверл 2 = 116... 120° . При этом главные режущие кромки строго прямолинейны и совпадают с линейчатой образующей винтовой передней поверхности. При заточке сверл угол заточки может быть изменен в пределах от 70° до 135°. При этом режущие кромки становятся криволинейными, меняются соотношение ширины и толщины срезаемой стружки и величины передних углов на главных режущих кромках. Соответственно меняются степень деформации срезаемого припуска, силы и температура резания и условия отвода стружки. Задний угол
на главных режущих кромках создается путем заточки перьев сверл по задним поверхностям, которые могут быть оформлены как части плоской, конической или винтовой поверхностей.
НАЗНАЧЕНИЕ РЕЖИМА РЕЗАНИЯ ПРИ СВЕРЛЕНИИ
Исходные данные
В качестве детали, в которой сверлением необходимо получить три сквозных вертикальных отверстия диаметром М8 (l
= 18 мм) на станке 2А135, выбираем ступицу из стали 20Х (в = 580 Мпа), чертеж которой представлен Порядок назначения
1. Выбор станка
Выбираем станок модели 2А135
2. Выбор инструмента
Сверло 6,4 ГОСТ 10903 - 77
3. Определение глубины резания t
Где D
- диаметр отверстия;
4. Выбор подачи S
По [1, табл. 1] выбираем диапазон подач ?S
= 0,15 - 0,2 мм/об.
По [1, табл. 2 - табл. 5] находим K, , ,
Тогда
Скорректируем диапазон подач:
мм/об
По паспортным данным станка 2А135 для данного диапазона подач находим подачу S=0,13 мм/об.
5. Определяем теоретическую скорость резания
По табл. определяем:
По табл. 6 находим T=25 мин, а по [1, табл. 7 - табл. 10] выбираем:
Тогда , а
м/мин
6. Определяем теоретическую частоту вращения шпинделя станка
об/мин
7. Определяем действительную частоту вращения шпинделя станка
Согласно паспортным данным станка 2А135
об/мин
8. Определяем действительную скорость резания и сравниваем её с расчетной
м/мин
Расхождение между и составляет 4,4%, т.е. станок по скоростным параметрам выбран правильно.
9. Проверяем выбранный режим резания
а) Проверка по мощности
По [1, табл. 12] находим: а по [1,табл. 13]
Тогда
кг•м, и
По [1, прил.1] , поэтому
Т.е проверка по мощности выполняется ()
б) Проверка по осевой силе
По [1, табл.12] находим а по [1, табл.13] определяем
Тогда кг
По [1, прил.1] находим Q=1600 кг,
т.е. проверка по осевой силе тоже выполняется ().
Таким образом, данный режим резания назначен правильно.
10. Определяем основное технологическое время T мин
Глава 4 режущий инструмент
Режущий инструмент — инструмент, предназначенный для изменения формы и размеров обрабатываемой заготовки путём удаления части материала в виде стружки или шлама с целью получения готовой детали или полуфабриката. Подразделяется:
· по типу применения — на ручной и машинный (станочный), строительный, монтажный, и т. д.
· по типу обрабатываемого материала — металлорежущий, дереворежущий, и т. д.,
· по типу применяемого материала — быстрорежущий, для высокоскоростной обработки, и т. д.,
· по типу обрабатываемой детали — зуборезный, резьбообразующий, и т. д.,
· по характеру обработки — абразивный, шлифовальный, и т. д.,
· по чистоте обработанной повехности - черновая обработка, получерновая обработка, чистовая обработка, получистовая обработка, суперчистовая обработка.
Фасонные резцы
Основные понятия
Резцы с фасонной режущей кромкой применяют для обработки поверхностей вращения цилиндрических и винтовых поверхностей на токарных и револьверных станках, автоматах и полуавтоматах. Схема обработки поверхности вращения фасонным резцом показана. В процессе обработки заготовка быстро вращается вокруг своей оси, а резец совершает движение подачи. Наиболее часто движение подачи является поступательным. Оно может осуществляться в радиальном направлении. Резцы с таким направлением подачи называют радиальными). В процессе обработки направления движения подачи одной или нескольких точек режущей кромки такого резца пересекает ось детали.
Фасонные резцы с осевой подачей применяют при обработке односторонних профилей, не имеющих кольцевых канавок или выступов, а также при обработке торцовых фасонных поверхностей. По сравнению с радиальными резцами при обработке ступенчатых деталей рассматриваемые резцы срезают меньшие сечения, а силы резания будут меньшими. Это позволяет обрабатывать менее жесткие детали.
На рис.4.1. Схемы обработки поверхности вращения фасонным резцами

Рис. 4.1 Схемы обработки поверхности вращения фасонным резцами
Направление подачи различных точек режущей кромки фасонного резца может касаться обработанной поверхности детали. Фасонные резцы с таким направлением подачи называют тангенциальными фасонными резцами .Произвольная точка режущей кромки такого резца начинает резание в точке А, а заканчивает работу в точке В, При дальнейшем движении подачи резец металла не снимает, поэтому детали получаются идентичными, по размерам, независимо от того, в какой момент времени выключено движение подачи.
Некоторое распространение, находя фасонные резцы с вращательным движением подачи. Такие резцы могут быть радиальными и тангенциальными. У тангенциальных резцов режущая кромка описывает поверхность вращении. И касающуюся поверхности детали Д. В этом случае размеры обработанной поверхности детали не зависят от момента выключения движения подачи.
Часто фасонные резцы используются на строгальных, долбежных или специальных станках при обработке цилиндрических поверхностей.
В процессе обработки резец относительно детали совершает поступательное движение резания, направление которого совпадает с образующей цилиндрической поверхности, и движение подачи. Обычно такие резцы проектируются как резцы радиального типа, у которых направление поступательного движения подачи перпендикулярно образующим. Например, резцы зубодолбежных головок, предназначенные для одновременной обработки всех зубьев цилиндрических зубчатых колес.
Фасонные резцы для обработки цилиндрических поверхностей могут иметь вращательное движение подачи и проектироваться как резцы тангенциального типа.
При вращательном движении подачи режущая кромка резца описывает поверхность вращения, касающуюся поверхности детали. В результате этого движения любая точка режущей кромки в определенный момент времени входит в контакт с материалом заготовки и срезает его, а затем выходит из соприкосновения с заготовкой. Поэтому, как и у тангенциальных резцов, в этом случае момент выключения подачи резца не оказывает влияния на размеры детали.
Обработка винтовых поверхностей фасонными резцами производится при винтовом движении резания.
В результате этого движения винтовая поверхность детали скользит «сама по себе». Кроме движения резания при обработке винтовых поверхностей фасонный резец после каждого прохода углубляется в материал заготовки до получения полного профиля винтовой поверхности. Рассматриваемые резцы наиболее часто применяют при обработке резьбы.
По форме задней поверхности, особенностям конструкции фасонные резцы делятся на стержневые, призматические и круглые. Стержневые фасонные резцы подобны обычным токарным резцам, но имеют фасонную режущую кромку, соответствующую форме поверхности детали. Эти резцы имеют малое число переточек и в серийном производстве используются редко. Закрепляются они в суппорте как обычные резцы.
На рис.4.2 Типы фасонных резцов

Рис.4.2Типы фасонных резцов
Призматический фасонный резец представляет собой призму .Одна из боковых граней имеет фасонную цилиндрическую поверхность и служит задней поверхностью, а одна из плоских торцевых граней служит передней поверхностью. Задние углы на фасонной режущей кромке такого резца создаются за счет его наклонной установки в державке. Круглый фасонный резец является телом вращения, у которого вырезан угловой паз, для создания передней плоскости и пространства для схода стружки. Ось резца устанавливается выше оси детали, поэтому на фасонной режущей кромке создаются положительные задние углы. Дисковые фасонные резцы просты в изготовлении и допускают большое число переточек, но крепятся менее жестко и обычно применяются для обработки деталей с меньшими глубинами профиля, чем призматические фасонные резцы.
У круглых резцов, ось которых параллельна оси детали, задние углы на участках режущих кромок, перпендикулярных оси детали, равны нулю. На этих участках задняя поверхность, создающаяся при вращении режущей кромки вокруг оси резца, является торцевой плоскостью. В процессе работы резца эта плоскость соприкасается с соответствующей торцевой плоскостью детали. Из-за этого на рассматриваемом участке режущей кромки не создается зазор между материалом заготовки и задней поверхностью, что снижает режущую способность резца. Такое же явление наблюдается и у призматических резцов при их обычной установке.
Чтобы получить положительные задние углы на участках режущих кромок, перпендикулярных оси детали, применяют круглые фасонные резцы с наклонным расположением оси под углом ФИ по отношению к оси детали и призматические фасонные резцы с наклонным расположением базы крепления.
На рис. 4.3 Фасонные резцы с наклонной установкой и винтовой задней

Рис.4.3 Фасонные резцы с наклонной установкой и винтовой задней
В необходимых случаях при наклонной подаче рассматриваемых резцов становится возможным обработка «поднутрений» на детали. С целью получения положительных задних углов у круглых резцов может создаваться также винтовая задняя поверхность. Такие резцы особенно пригодны для расточки ступенчатых каналов с осевой подачей. Они могут изготовляться с хвостовиком, служащим для их крепления. Передняя поверхность фасонных резцов в большинстве случаев является плоскостью. Передняя плоскость может располагаться под определенным передним углом ГАММА параллельно оси детали В общем же случае, фасонные резцы имеют двойной наклон передней плоскости, когда ее положение характеризуется не только передним углом ГАММА, по и углом наклона режущей кромки ЛЯМБДА
На рис. 4.4 Положение передней плоскости резца

Рис 4.4 Положение передней плоскости резца
Такие резцы используются при повышенных требованиях в отношении соблюдения формы и точности обработки конических участков поверхностей деталей.
ЗАКЛЮЧЕНИЕ
В процессе изучения и работы были рассмотрены технологические возможности, технические характеристики, способы крепления заготовки и инструмента, устройство и принцип действия станка. А так же была рассмотрена кинематическая схема, где показаны главное движение, движение подачи, радиальное перемещение суппорта, продольное перемещение стола и другие. В дальнейшем был расчет количества зубьев и определение знаменателя геометрического ряда, расчет частот вращения каждой ступени, выбор оптимального варианта структурной сетки и построение графика частот вращения. Так же была изучена техника безопасности при работе на данных станках. Сюда входят правила эксплуатации и технического обслуживания станка, установка заготовок и зажимных приспособлений, приемы работы. Современный уровень развития радиоэлектроники позволяет ученым и инженерам ставить и разрешать задачи создания новых устройств, которые освобождают человека от необходимости следить за производственным процессом и направлять его, т.е. заменяют оператора, диспетчера. Появился новый класс машин – управляющие машины. Они могут выполнять самые разнообразные и часто довольно сложные задачи управления производственными процессами. Создание управляющих машин позволяет перейти от автоматизации отдельных станков и агрегатов к комплексной автоматизации конвейеров, цехов, целых заводов. В этом не малую роль будут играть токарные автоматы и полуавтоматы. Токарные автоматы и полуавтоматы могут быть универсальные и специализированные, горизонтальные и вертикальные, одно и многошпиндельные. Одношпиндельные прутковые токарные автоматы подразделяют на револьверные, фасонно-отрезные и фасонно-продольные. В универсальном исполнении одношпиндельные токарно-револьверные автоматы имеют шестипозиционную револьверную головку и поперечные суппорты.
Список использованной литературы
1. Ачеркан Н.С. Гаврюшин А.А. и др. Металлорежущие станки. 2-хтомник Машиностроение, 1965г.
2. Кучер А.А. Киватицкий М.М. Покровский А.А, Металорежущие станки Машиностроение, 1972 - 308с
3. Локтева С.Е. Станки с программным управлением и промышленные
Работы. Машиностроение, 1986г
4. Металлорежущие станки / Колев Н.С., Красниченко Л.В., Никулин Н.С.и др. - М.: Машиностроение, 1980. - 500 с
5. Металлорежущие станки. / Под ред. В.Э.Пуша. - М.: Машиностроение, 1985.-256 с
6. Малахов Я.А. Зубообрабатывающие и резьбофрезерные станки и их наладка.
7. Мильштейн М.З. Нарезание зубчатых колес, 1972г.
8. Ничков А.Г. Фрезерные станки.
9. Веренина Л.И., Усов Б.А Конструкции и наладка токарно-затыловочных станков.
10. Паспорта м/р станков.
11. Иноземцев ГГ. Проектирование металлорежущих инструментов: Учеб. пособие для втузов по специальности «Технология машиностроения, металлорежущие станки и инструменты» - М.: Машиностроение, 1984.1270 с.
12. Металлорежущие инструменты: Учебник для вузов по специальностям «Технология машиностроения», «Металлорежущие станки и инструменты /Г.Н.Сахаров, О.Б.Арбузов, Ю.Л.Боровой и др. - М.: Машиностроение, 1989. - 328 с.
13. Нарожных А.Т., Скребнев Г.Г., Токарев В.В. Проектирование фасон-В|йых резцов: Учебное пособие / ВолгГТУ, Волгоград, 1999. - 88 с.
14. Руководство по курсовому проектированию металлорежущих инструментов: Учебное пособие для вузов по специальности «Технология машиностроения, металлорежущие станки и инструменты» - М.: Машиностроение 1986. - 288 с.
15. Грачев Л.Н. Констукции и наладка станка с программным управлением и роботизированных комплексов. - М Высшая школа,1986
16. Ермаков Ю.М. Металлорежущие станки. М.: Машиностроение, 1985.
17. Камышный Н.И. . Конструкция и наладка токарных автоматов и полуавтоматов. – М: Высшая школа, 1975.
18. Кузнецов Ю.Н. Станки с ЧПУ – Высшая школа, 1991.
19. Локтева С.Е. Станки с программным управлением и промышленные роботы. – М.: Машиностроение,1986.
20. Технология конструкционных материалов. Учебник для ВУЗов М., «Машиностроение», 1977.
|
