Федеральное агентство по образованию
Вологодский государственный технический университет
Кафедра экономики и менеджмента
КОНТРОЛЬНАЯ РАБОТА
по дисциплине: машины и оборудование
Студент: Востров Д.В.
группа: ЗЭУП-21
шифр: 10053201120
проверил: Брынин Е.А.
оценка:
Дата
подпись
Вологда
2010
СОДЕРЖАНИЕ
ТЕМА 1. КОНВЕЙЕРЫ ИХ КЛАССИФИКАЦИЯ,
ОБЛАСТЬ ПРИМЕНЕНИЯ
3
ГЛАВА 1. Транспортирующие машины
(конвейеры)
3
1.1. Транспортирующие машины с тяговым органом 3
1.2. Транспортирующие машины без тягового органа 6
ТЕМА 2. СВЕРЛИЛЬНЫЕ СТАНКИ. ХАРАКТЕРИСТИКА ОБОРУДОВАНИЯ
9
1. ГЛАВА 1. Сверлильные и расточные станки
9
1.1. Вертикально-сверлильные станки 9
1.2. Радиально-сверлильные станки 11
1.3. Многошпиндельные сверлильные станки и головки 12
1.4. Горизонтально-расточные станки 13
1.5. Координатно-растояные станки 15
1.6. Алмазно-расточные станки 16
2. ГЛАВА 2. Металлорежущие инструменты, используемые
при сверлении, зенкеровании и развертывании
18
2.1. Сверла 18
2.2. Развертки 20
2.3. Зенкеры и зенковки 22
Список используемых источников
24
ТЕМА 1. КОНВЕЙРЫ ИХ КЛАССИФИКАЦИЯ,
ОБЛАСТЬ ПРИМЕНЕНИЯ
ГЛАВА 1. Транспортирующие машины
(конвейеры)
Транспортирующие машины (конвейеры) предназначены для перемещения массового груза непрерывным потоком без остановок для их загрузки и разгрузки. Массовыми называют грузы, состоящие из большого числа однородных частиц или кусков, а также штучные однородные грузы, перемещаемые в большом количестве. Транспортные операции по перемещению таких грузов отличаются однотипностью, поэтому конвейеры значительно легче поддаются автоматизации, чем грузоподъемные машины.
Основной характеристикой конвейеров является их производительность, выражаемая в объемных единицах (объемная производительность V
,
м3
/ч) или в единицах массы (массовая производительность или просто производительность Q, т/ч), перемещаемой конвейером в единицу времени. Объемная и массовая производительность связаны между собой зависимостью Q
= γV
,
где γ— объемная или насыпная масса (масса единицы объема, занимаемого материалом), т/м3
.
Все устройства непрерывного транспорта можно подразделить на две группы: транспортирующие машины с тяговым органом (лента, цепь, канат), в которых груз перемещается вместе с тяговым органом, и транспортирующие машины без тягового органа.
Реклама

1.1. Транспортирующие машины с тяговым органом.
Группа транспортирующих машин с тяговым органом включает в себя ленточные и цепные конвейеры различного вида и назначения.
Ленточные конвейеры
(рис. 1, а)
имеют: тяговый орган 2, выполненный в виде бесконечной ленты, являющейся одновременно и несущим элементом конвейера; приводной барабан 1
; натяжное устройство с натяжным хвостовым барабаном 6
и натяжным грузом 7,
поддерживающих роликов на рабочей ветви ленты 4
и на холостой ветви ленты 8;
загрузочное устройство 5 и разгрузочное устройство 3,
отклоняющий барабан 10;
устройство для очистки ленты 11.
Все элементы конвейера смонтированы на металлической раме 9.
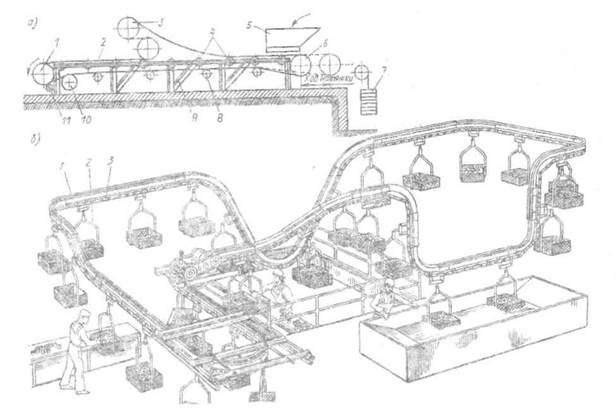
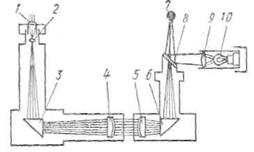
Рис. 1 Конвейеры с тяговым органом
В ленточных конвейерах лента используется в качестве транспортирующего органа, осуществляя одновременно и тяговую связь между барабанами конвейера. В конвейерах применяют ленты резинотканевые, резинотросовые и стальные. Наиболее распространены резинотканевые ленты, ткань которых состоит из хлопчатобумажных волокон (бельтинг). В последнее время в производстве резинотканевых лент все большее распространение получают ткани из комбинированных и синтетических волокон: полиэфирные, вискозные, капроновые, анидные, лавсановые, обладающие значительно большей прочностью по сравнению с хлопчатобумажным бельтингом. Все более широкое применение находят резинотросовые ленты со стальными канатами, завулка-низированными между слоями ткани вдоль продольной оси ленты. При одинаковой толщине резинотросовая лента в 15—25 раз прочнее резинотканевой. Для транспортирования материала при высоких и низких температурах, и материалов химически агрессивных применяют стальные ленты — холоднокатаные толщиной 0,6—1,2 мм и проволочные (плетеные и шарнирно-звеньевые).
В машиностроительном производстве ленточные конвейеры получили широкое применение для межоперационного транспортирования грузов в поточном производстве, для транспортирования в литейных цехах (подача формовочной земли) и т. п. Конвейеры с проволочной стальной лентой применяют для транспортирования деталей с одновременной их термообработкой.
В цепных конвейерах
тяговым органом являются цепи различного типа. Для перемещения груза конвейеры снабжаются пластинами, образующими полотно конвейера, или ковшами, люльками, специальными подхватами, тележками и т. п. Одновременно с транспортированием груза на цепном конвейере могут производиться различные технологические операции. Особенно широко применяют цепные конвейеры в сборочных цехах (сборочные конвейеры), а также в автоматических цехах и заводах, так как цепной конвейер можно легко приспособить к выполнению данного технологического процесса и автоматизировать его работу по заданной программе.
Реклама

Для транспортирования штучных и массовых грузов, а также для автоматических и поточных линий, для линий сборки находят применение тележечные конвейеры,
изгибающиеся в вертикальной или горизонтальной плоскости. Цепи этих конвейеров соединены с тележками, передвигающимися на катках по рельсам.
Весьма актуальной задачей современного производства является бесперегрузочное транспортирование грузов (в особенности штучных изделий и комплектующих узлов) по сложной про странственнои трассе, проходящей на протяжении всего технологического процесса от получения первичной заготовки до гото вой продукции. Эта задача успешно решается с помощью подвесных цепных конвейеров
различных типов.
Подвесной конвейер (рис. 1, б)
состоит из замкнутого тягового органа (цепи или каната) 3
с каретками, служащими для поддержки тягового органа и прикрепления подвесок 2.
Катки кареток тяговым органом перемещаются по замкнутому подвесному пути /. Для возможности создания пространственной трассы конвейера тяговый орган должен иметь гибкость в горизонтальной и вертикальной плоскости.
Большая протяженность конвейера в сочетании с его пространственной гибкостью позволяет обслуживать одним конвейером законченный производственный цикл, причем перемещаемые грузы могут подвергаться различным технологическим операциям: очистке в пескоструйных камерах; наклепу в дробеструйных камерах, травлению или пропитке в химических ваннах; нанесению лакокрасочных покрытий; сушке и т. п. Это сделало подвесные конвейеры наиболее распространенными средствами внутрицехового и межцехового транспортирования грузов и межоперационной передачи изделий в поточном производстве.
1.2. Транспортирующие машины без тягового органа
.
К группе транспортирующих устройств непрерывного транспорта относятся различные виды гравитационных устройств, качающиеся1
конвейеры, шнеки, пневматические устройства и т. п.
В гравитационных устройствах
для транспортирования грузов используют силу тяжести. Простейшими гравитационными устройствами являются наклонная плоскость, желоб, труба, по которым скатывается транспортируемый груз. К гравитационным устройствам для транспортирования грузов относятся также неприводные рольганги, в которых наклонная плоскость образована из ряда роликов, установленных на раме (рис. 2, а).
В ряде отраслей промышленности, особенно в прокатных цехах, рольганги используются не только как гравитационные устройства, но и как приводные. В этом случае ролики получают принудительное вращение от привода и сообщают поступательное движение грузу с горизонтальном направлении.
 Качающиеся конвейеры
применяют для транспортирования на небольшие расстояния всех видов насыпных грузов, кроме липких. В машиностроительном производстве их широко используют для транспортирования металлической стружки, смоченной эмульсией и маслом, горячей земли, выбитой из литейных форм, мелкого литья и других грузов. Качающийся конвейер представляет собой желоб, подвешенный или опертый на неподвижную раму. Желоб совершает колебательные движения, вследствие чего находящийся в нем груз перемещается вдоль желоба. На рис. 2, б
показана схема качающегося Качающиеся конвейеры
применяют для транспортирования на небольшие расстояния всех видов насыпных грузов, кроме липких. В машиностроительном производстве их широко используют для транспортирования металлической стружки, смоченной эмульсией и маслом, горячей земли, выбитой из литейных форм, мелкого литья и других грузов. Качающийся конвейер представляет собой желоб, подвешенный или опертый на неподвижную раму. Желоб совершает колебательные движения, вследствие чего находящийся в нем груз перемещается вдоль желоба. На рис. 2, б
показана схема качающегося
Рис. 2 Конвейеры без тягового органа
конвейера инерционного типа. Конвейер состоит из стального желоба 1
, совершающего колебательные движения на упругих стойках 3,
изготовленных из ре< пружинной стали, от кривошипа 2.
Так как опорные установлены наклонно (под углом а)
к желобу, последний awe с грузом при движении вперед несколько приподнимается, а движении назад опускается, в результате чего груз периодически перемещается вперед.
Шнеком (винтовым конвейером)
называют устройство, в котором транспортирование материала по желобу или трубе осуществляется витками вращающегося винта. Витки винта штампуют стального листа толщиной 4—8 мм и затем приваривают к валу. Шнеки применяют не только для перемещения груза по горизонтали, но также по наклонным и вертикальным желобам ( рис. 2, в).
Благодаря простоте герметизации трубопровода шнеки широко используют для транспортирования пылящих, горячих или выделяющих вредные испарения грузов. При помощи шнеков удобно транспортировать пылевидные, мелкозернистые волокнистые материалы. В механообрабатывающих цехах шнеками транспортируют металлическую стружку.
Пневматические транспортирующие устройства
предназначены для транспортирования по трубам в смеси с воздухом порошкообразных, мелковолокнистых и зернистых материалов, скорости которым сообщается движущимся потоком воздуха. В зависимо от способа создания движения воздуха по трубопроводам установки пневмотранспорта делят на всасывающие, нагнетающие и смешанные. На машиностроительных предприятиях для отвода стружки и пыли, образующихся при обработке резанием таких материалов, как текстолит, стекловолокно и т. п., широко применяют пневмоустройства всасывающего типа, работающие в результате создания в трубопроводе разрежения и всасывания в него атмосферного воздуха вместе с грузом. Во всасывающем устройстве вакуум-насос 6
(рис. 2, е)
создает разрежение, благодаря которому воздух вместе со стружкой и пылью через сопло 1
засасывается в трубопровод 2.
В отделительной камере 3
происходит осаждение груза, и воздух, содержащий мелкую пыль, проходит через фильтр 5.
Очищенный воздух через вакуум-насос выбрасывается в атмосферу. Удаление груза производят через шлюзовые затворы 4,
препятствующие засасыванию воздуха из атмосферы. При работе всасывающей установки отсутствует пыление, что весьма существенно в санитарно-гигиеническом отношении. Такие устройства пневмотранспорта целесообразно применять при необходимости доставки груза разветвленным трубопроводом из нескольких пунктов погрузки к одному пункту разгрузки.
ТЕМА 2. СВЕРЛИЛЬНЫЕ СТАНКИ. ХАРАКТЕРИСТИКА ОБОРУДОВАНИЯ.
Глава 1. Сверлильные и расточные станки
Сверлильные станки предназначены для сверления глухих и сквозных отверстий, рассверливания, зенкерования, развертывания, растачивания и нарезания резьбы.
 Основными формообразующими движениями при сверлильных операциях являются: главное — вращательное движение v
и движение подачи sшпинделя станка (рис. 1, а).
Кинематические цепи, осуществляющие эти движения, имеют самостоятельные органы настройки iv
и is
,
посредством которых устанавливается необходимая скорость вращения инструмента и его подача. Основными формообразующими движениями при сверлильных операциях являются: главное — вращательное движение v
и движение подачи sшпинделя станка (рис. 1, а).
Кинематические цепи, осуществляющие эти движения, имеют самостоятельные органы настройки iv
и is
,
посредством которых устанавливается необходимая скорость вращения инструмента и его подача.
Сверлильные станки подразделяются на вертикально-сверлильные настольные и наклонные, радиально-сверлильные, для глубокого сверления,
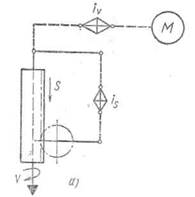
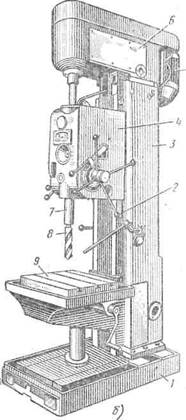
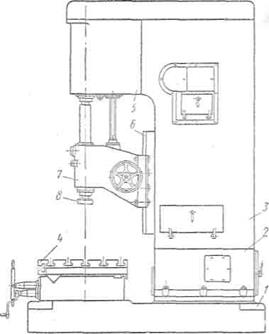
Рис. 1. Вертикально-сверлильный станок
центровальные и многошпиндельные. Настольные станки строят для наибольшего условного диаметра сверления отверстий в стальных деталях (0В
= 500-4-600 Мн/м2
) 3; 6; 12 и 16 мм, вертикально-сверлильные и ради-ально-сверлильные — 18; 25; 35; 50 и 75 мм. Вылет радиально-сверлильных станков составляет 1300—2000 мм.
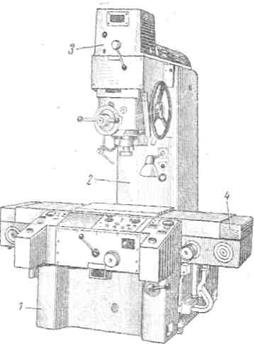
1.1. Вертикально-сверлильные станки
Общий вид наиболее распространенного универсального одношпиндель-ного вертикально-сверлильного станка показан на рис. 1, б. Станок предназначен для работы в основных производственных цехах, а также в условиях единичного и мелкосерийного производства, в ремонтно-механических и инструментальных цехах.
 На фундаментной плите 1
смонтирована колонна 3
коробчатой формы. В ее верхней части размещена шпиндельная головка 6,
несущая электродвигатель 5
и шпиндель 7 с инструментом 8.
На вертикальных направляющих колонны установлена шпиндельная бабка 4,
внутри которой размещен механизм подачи, осуществляющий вертикальное перемещение шпинделя. Поднимать и опускать шпиндель можно механически и вручную, с помощью штурвала 2.
Для установки и закрепления приспособления с обрабатываемыми заготовками имеется стол 9.
Его устанавливают на различной высоте, в зависимости от размеров обрабатываемых деталей. На фундаментной плите 1
смонтирована колонна 3
коробчатой формы. В ее верхней части размещена шпиндельная головка 6,
несущая электродвигатель 5
и шпиндель 7 с инструментом 8.
На вертикальных направляющих колонны установлена шпиндельная бабка 4,
внутри которой размещен механизм подачи, осуществляющий вертикальное перемещение шпинделя. Поднимать и опускать шпиндель можно механически и вручную, с помощью штурвала 2.
Для установки и закрепления приспособления с обрабатываемыми заготовками имеется стол 9.
Его устанавливают на различной высоте, в зависимости от размеров обрабатываемых деталей.
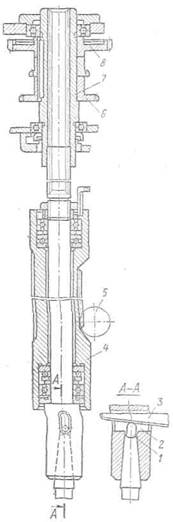
 На рис. 2 показана конструкция характерного для сверлильных станков шпиндельного узла. Втулка 7,
с жестко насаженными колесами 6 и 8
, вращается в двух шарикоподшипниках. На верхнем конце шпинделя нарезаны шлицы, которыми он входит внутрь втулки, получая от нее, вращение. Нижний участок его смонтирован на подшипниках в пиноли 4.
Конструкция узла такова, что шпиндель, свободно вращаясь, не имеет осевого смещения относительно пиноли. Последняя, получая вертикальную подачу от реечного колеса 5,
увлекает за собой шпиндель. Когда при сверлении шпиндель перемещается вниз или вверх, возвращаясь в исходное положение, шлицевый участок его скользит в шлицах втулки 7
без нарушениякинематической связи. Сила подачи при сверлении воспринимается упорным подшипником, смонтированным в нижней части пиноли, а сама пиноль перемещается в круговых направляющих корпуса (см. рис. 1, б) шпиндельной бабки 4. На рис. 2 показана конструкция характерного для сверлильных станков шпиндельного узла. Втулка 7,
с жестко насаженными колесами 6 и 8
, вращается в двух шарикоподшипниках. На верхнем конце шпинделя нарезаны шлицы, которыми он входит внутрь втулки, получая от нее, вращение. Нижний участок его смонтирован на подшипниках в пиноли 4.
Конструкция узла такова, что шпиндель, свободно вращаясь, не имеет осевого смещения относительно пиноли. Последняя, получая вертикальную подачу от реечного колеса 5,
увлекает за собой шпиндель. Когда при сверлении шпиндель перемещается вниз или вверх, возвращаясь в исходное положение, шлицевый участок его скользит в шлицах втулки 7
без нарушениякинематической связи. Сила подачи при сверлении воспринимается упорным подшипником, смонтированным в нижней части пиноли, а сама пиноль перемещается в круговых направляющих корпуса (см. рис. 1, б) шпиндельной бабки 4.
Нижний конец шпинделя имеет коническое отверстие определенного стандартного размера. В него вводится хвостовик инструмента) и удерживается там силой трения. Шпиндель имеет отверстие 2, в которое вводится клин 3
для выталкивания инструмента. В случае необходимости закрепления в шпинделе инструмента различных диаметров с хвостовиками, меньшими мера гнезда, применяют переходные втулки.
1. 2. Радиально-сверлильные станки
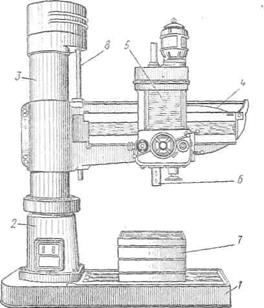 Перемещение по плоскости стола крупногабаритных и тяжелых деталей вызывает большие неудобства и потерю времени. Поэтому при обработке большого количества отверстий в таких деталях применяют радиально-сверлильные станки (рис. 3). При работе на них деталь остается неподвижной, ашпиндель со сверлом перемещается относительно детали и устанавливается в требуемое положение. Перемещение по плоскости стола крупногабаритных и тяжелых деталей вызывает большие неудобства и потерю времени. Поэтому при обработке большого количества отверстий в таких деталях применяют радиально-сверлильные станки (рис. 3). При работе на них деталь остается неподвижной, ашпиндель со сверлом перемещается относительно детали и устанавливается в требуемое положение.
 На фундаментной плите 1
установлена тумба 2
с неподвижной :лонной, на которую надета гильза 3,
поворачивающаяся вокругколонны на 360°. На гильзе смонтирована траверса 4.
Траверса, в свою очередь, имеет горизонтальные направляющие, в которых может перемещаться сверлильная головка 5. Внутри головки размещены коробка скоростей, коробкаподач и узел шпинделя 6.
На передней крышке расположены органы управления. На фундаментной плите 1
установлена тумба 2
с неподвижной :лонной, на которую надета гильза 3,
поворачивающаяся вокругколонны на 360°. На гильзе смонтирована траверса 4.
Траверса, в свою очередь, имеет горизонтальные направляющие, в которых может перемещаться сверлильная головка 5. Внутри головки размещены коробка скоростей, коробкаподач и узел шпинделя 6.
На передней крышке расположены органы управления.
Обрабатываемые детали устанавливаются на столе 7 или непосредственно на верхней плоскости фундаментной плиты 1
..Шпиндель 6
со сверлильной головкой может перемещаться в горизонтальном направлении, а вместе с траверсой 4
и гильзой 3
поворачиваться вокруг оси неподвижной колонны. Эти два движения обеспечивают установку инструмента по любым координатам. С помощью винта 8
траверса поднимается или опускается по гильзе и закрепляется на любой высоте. Гильза, в свою очередь, может быть зажата на колонне, асверлильная головка — на траверсе. Перед сверлением отверстиягильзу и сверлильную головку фиксируют, а по окончании обработки освобождают. Механизмы зажима размещены в нижней части гильзы — над тумбой 2
и в сверлильной головке 5
.
1. 3.
Многошпиндельные сверлильные станки и головки
 Для одновременного сверления нескольких отверстий применяют многошпиндельные станки и головки. Для одновременного сверления нескольких отверстий применяют многошпиндельные станки и головки.

В машиностроении нашли распространение два вида многошпиндельных головок: головки, которыми оснащают универсальные вертикально-сверлильные станки; сверлильные головки (шпиндельные коробки, насадки) агрегатных станков.
На рис. 4, а
показана компоновка узлов многошпиндельной сверлильной головки с неподвижными шпинделями. Шпиндели 1
, количество и расположение которых зависит от числа отверстий обрабатываемой детали, смонтированы в корпусе 2
головки. Привод их осуществляется от центрального – ведущего колеса 5 (рис. 4, б).
Головка устанавливается на станке следующим образом. Пиноль сверлильного станка оснащают фланцем 4.
К нему прикреплю корпус 2
головки. На конце ведущего вала 5
сделаны лыски, которыми он заходит в прямоугольный паз шпинделя 6
станка. Следовательно, шпиндель станка вращает все шпиндели головки, а пиноль сообщает ей подачу.
У многих универсальных станков пиноль не имеет фланца, а шпиндель – прямоугольного паза. В таких случаях фланец 4
делают насадным, а вал 5 –
с хвостовиком, размер которого соответствует конусу в шпинделе.
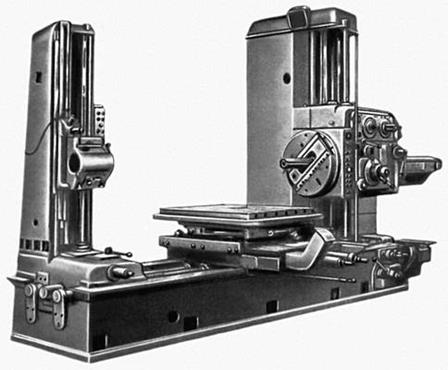
1.4. Горизонтально-расточные станки
Расточные станки предназначаются для обработки деталей в условиях единичного и серийного производств. Это – широкоуниверсальные станки, на которых можно производить черновое и чистовое растачивание отверстий, обтачивание наружных цилиндрических поверхностей и торцов отверстий, сверление, зенкерование и развертывание отверстий, фрезерование плоско стей, нарезание резьбы и другие операции. Большое разнообразие различных видов обработки, производимых на расточных станках, позволяет в ряде случаев проводить полную обработку детали без перестановки ее на другие станки, что особенно важно для тяжелого машиностроения. стей, нарезание резьбы и другие операции. Большое разнообразие различных видов обработки, производимых на расточных станках, позволяет в ряде случаев проводить полную обработку детали без перестановки ее на другие станки, что особенно важно для тяжелого машиностроения.
Характерной особенностью расточных станков является наличие горизонтального (или вертикального) шпинделя, который совершает движение осевой подачи. В шпинделе крепится режущий инструмент — борштанга с резцами, сверло, зенкер, фреза, метчик и др. В последнее время широкое применение начинают получать расточные станки с программным управлением, что сокращает время на переналадку станка, повышает производительность труда и улучшает качество обработки.
В зависимости от характера выполняемых операций, назначения и конструктивных особенностей расточные станки можно подразделить на универсальные и специализированные. В свою очередь, универсальные станки разделяются на горизонтально-расточные, координатно-расточные и алмазно-расточные (отделочно-расточные). Для всех типов станков наиболее существенным параметром, определяющим все основные размеры станка, является диаметр расточного шпинделя.
Формообразующими движениями в расточных станках являются: вращение" шпинделя и движение подачи. Подача сообщается либо инструменту, либо заготовке, в зависимости от условий обработки. Вспомогательными движениями являются: установочные перемещения шпиндельной бабки в вертикальном направлении, установочные перемещения стола в продольном и поперечном направлениях, установочное перемещение задней стойки с Люнетом, перемещение люнета по стойке и т. д.
| Рис. 5 Горизонтально-расточной станок |
|
 1.5. Координатно-растояные станки
Координатно-расточные станки предназначены для обработки отверстий в кондукторах, приспособлениях и деталях, для которых требуется высокая точность взаимного расположения отверстий. Наряду с растачиванием на станках могут выполняться сверлильные операции, чистовое фрезерование, разметка и проверка линейных размеров, в частности межцентровых расстояний. Применяя поставляемые со станком поворотные столы и другие принадлежности, можно, кроме того, обрабатывать отверстия, заданные в полярной системе координат, наклонные и взаимноперпендикулярные отверстия и протачивать торцовые поверхности.
На рис. 6 представлен координатно-расточной станок 2А450, оборудованный оптическими устройствами, позволяющими отсчитывать целую и дробную части координатного размера. Станок 2А450 пригоден как для работы в инструментальных, так и в производственных цехах для точной обработки деталей без специальной оснастки.
В условиях нормальной эксплуатации станок обеспечивает точность установки межцентровых расстояний в прямоугольной системе координат — 0,004 мм, в полярной системе – 5 угловых секунд. Точность расстояний между осями отверстий, обработанных в нормальных для координатного растачивания условиях, — 0,006 мм.
 Координаты отсчитываются при помощи точных масштабных зеркальных валиков и оптических приборов. Зеркальные валики представляют собой стержни из нержавеющей стали, на которых нанесены шкалы в виде рисок. Поверхность валиков доведена до зеркального блеска. Координаты устанавливаются по точным шкалам путем наблюдения через специальные микроскопы. Координаты отсчитываются при помощи точных масштабных зеркальных валиков и оптических приборов. Зеркальные валики представляют собой стержни из нержавеющей стали, на которых нанесены шкалы в виде рисок. Поверхность валиков доведена до зеркального блеска. Координаты устанавливаются по точным шкалам путем наблюдения через специальные микроскопы.
  На рис. 7 приведена схема хода лучей при наблюдении продольного масштаба. Лучи от источника света 10
через линзы 9 направленным пучком падают на расположенную под углом 45° поверхность плоского стекла 8, На рис. 7 приведена схема хода лучей при наблюдении продольного масштаба. Лучи от источника света 10
через линзы 9 направленным пучком падают на расположенную под углом 45° поверхность плоского стекла 8,
 отражаются от него и попадают на зеркальную поверхность масштабного валика 7
. Лучи, отраженные валиком 7
, проходят плоское стекло 8,
преломляются призмой 6,
идут сквозь линзы 5 параллельным пучком и выходят из объектива. Пройдя расстояние между кареткой станка и пультом управления, лучи попадают в окуляр. Затем лучи проходят линзу 4,
преломляются призмой 3
и собираются в фокусе окуляра /. В поле зрения окуляра 1
находится тонкая стеклянная пластинка 2
с двумя параллельными визирными рисками, между которыми и должно располагаться изображение риски шкалы масштабного валика 7. отражаются от него и попадают на зеркальную поверхность масштабного валика 7
. Лучи, отраженные валиком 7
, проходят плоское стекло 8,
преломляются призмой 6,
идут сквозь линзы 5 параллельным пучком и выходят из объектива. Пройдя расстояние между кареткой станка и пультом управления, лучи попадают в окуляр. Затем лучи проходят линзу 4,
преломляются призмой 3
и собираются в фокусе окуляра /. В поле зрения окуляра 1
находится тонкая стеклянная пластинка 2
с двумя параллельными визирными рисками, между которыми и должно располагаться изображение риски шкалы масштабного валика 7.
Перемещения при помощи шкал зеркальных валиков измеряются следующим образом. Величина перемещения, равная целым миллиметрам, отсчитывается по масштабным линейкам с миллиметровыми делениями. Перемещения, составляющие доли миллиметров, отсчитываются по лимбам, закрепленным на валиках со шкалами. Точность производимых отсчетов зависит от точности шага рисок масштабного валика.
1.6. Алмазно-расточные станки
Алмазно-расточные станки предназначены для финишной обработки отверстий. Тонкое (алмазное) растачивание обеспечивает высокую точность геометрической формы отверстий и высокий класс чистоты поверхности.
Эти станки применяются для растачивания корпусных деталей станков, цилиндров авиационных и автомобильных двигателей и других деталей. В зависимости от расположения оси вращения шпинделя алмазно-расточные станки подразделяются на вертикальные и горизонтальные, по числу шпинделей – на одношпиндеольные и многошпиндельные.
 Главным движением в алмазно-расточных станках является вращение расточного шпинделя с инструментом. Движение подачи в горизонтальных станках сообщается столу, на котором закрепляется заготовка, в вертикальных станках — шпинделю. В специализированных горизонтальных алмазно-расточных станках движение подачи иногда сообщается шпиндельным головкам, в то время как заготовка остается неподвижной. Главным движением в алмазно-расточных станках является вращение расточного шпинделя с инструментом. Движение подачи в горизонтальных станках сообщается столу, на котором закрепляется заготовка, в вертикальных станках — шпинделю. В специализированных горизонтальных алмазно-расточных станках движение подачи иногда сообщается шпиндельным головкам, в то время как заготовка остается неподвижной.
 Шпиндели алмазно-расточного станка монтируются в прецизионных подшипниках качения или скольжения. В конструкциях шпиндельных головок для компенсации износа подшипников предусматривается автоматическая выборка зазора. Шпиндели алмазно-расточного станка монтируются в прецизионных подшипниках качения или скольжения. В конструкциях шпиндельных головок для компенсации износа подшипников предусматривается автоматическая выборка зазора.
На рис. 8 показан алмазно-расточной вертикальный станок, предназначенный для тонкого растачивания отверстий цилиндров блока автомобильного или тракторного двигателя алмазным инструментом или резцами из твердого сплава. Этот станок имеет массивную жесткую конструкцию, что уменьшает вибрации, возникающие от быстровращающихся механизмов.
На фундаментной плите 1
монтируется тумба 2,
а на ней — вертикальная станина 3.
На передней части плиты 1
имеются три Т-образных паза для закрепления стола 4.
На плите внутри тумбы 2
установлен электродвигатель для привода главного движения. Внутри тумбы 2
установлены насосы для охлаждающей жидкости и смазки, а также электроаппаратура. Внутри станины 3
размещены коробки скоростей и подач, а спереди, на наружной верхней ее части, установлена и закреплена шпиндельная головка 5.
По двум прямолинейным направляющим 6
вертикальной станины 3
может перемещаться кронштейн 7
со сменными борштангами 8.
От электродвигателя через клиноременную передачу, коробку скоростей и плоскоременную передачу шпиндель станка с борштангой 8
получает шесть различных значений частот вращения в пределах 225—550 об/мин. Настройка шпинделя с борштангой 8
на различную частоту вращения производится при помощи сменных зубчатых колес коробки скоростей.
Коробка подач также является самостоятельным узлом, вмонтированным внутри станины 3
в верхней ее части. Кроме механизма переключения рабочих подач шпинделя с борштангой 8,
в коробке подач находятся механизмы ускоренной его подачи и автоматического переключения шпинделя с ускоренного подвода на рабочую подачу и на ускоренный возврат шпинделя в исходное вертикальное положение.
Глава 2. Металлорежущие инструменты, используемые при сверлении, зенкеровании и развертывании.
2.1. Сверла
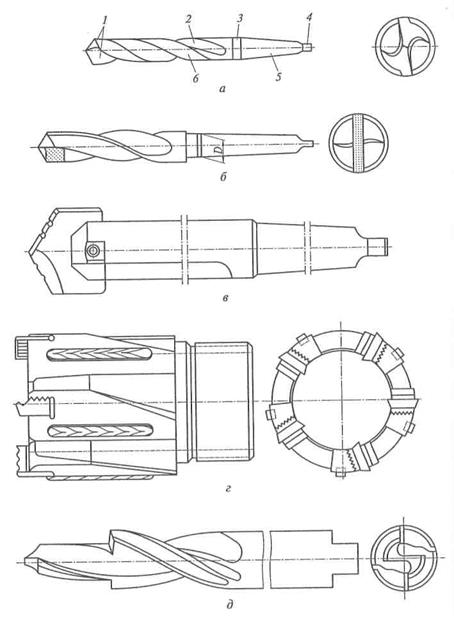
 Для сверления и растачивания отверстий диаметром до 80 мм используют сверла. В зависимости от конструкции и назначения различают следующие типы сверл: цилиндрические с винтовой канавкой и коническим хвостовиком (стандартные и удлиненные) (рис. 9, а);
сверла для рассверливания чугуна с пластиной из твердого сплава (рис. 9, б);
перовые для глубоких отверстий (рис. 9, в
); полые для кольцевого сверления отверстий диаметром I более 60 мм (рис. 9, г); ступенчатые (рис. 9, д). Для сверления и растачивания отверстий диаметром до 80 мм используют сверла. В зависимости от конструкции и назначения различают следующие типы сверл: цилиндрические с винтовой канавкой и коническим хвостовиком (стандартные и удлиненные) (рис. 9, а);
сверла для рассверливания чугуна с пластиной из твердого сплава (рис. 9, б);
перовые для глубоких отверстий (рис. 9, в
); полые для кольцевого сверления отверстий диаметром I более 60 мм (рис. 9, г); ступенчатые (рис. 9, д).
Основными частями сверла являются (см. рис. 9, а):
рабочая часть 6,
шейка 3,
хвостовик 5, поводок или лапка 4,
режущая часть 1
испиральная канавка 2
. Форма заточки режущей части существенно влияет на процесс резания и может быть обыкновенная, с подточкой перемычки, с подточкой перемычки и ленточки, с двойной заточкой и др.
Рис. 9 Сверла: а
— цилиндрическое с винтовой канавкой и коническим хвостовиком: 1
— режущая часть; 2
— спиральная канавка; 3
— шейка; 4
— лапка; 5
— хвостовик; 6
— рабочая часть; б
— цилиндрическое с пластиной из твердого сплава: D
— диаметр хвостовика; в
— перовое для глубоких отверстий; г
— полое для кольцевого сверления отверстий; д
— ступенчатое
Удлиненные сверла больше стандартных на 30...40 %.
Сверла для рассверливания отверстий в чугунных заготовках имеют прямолинейную канавку или канавку с крутой спиралью для отвода стружки и пластину твердого сплава на режущей части.
Перовые сверла для сверления глубоких отверстий большого диаметра могут иметь направляющие из твердых пород дерева и охлаждаться эмульсией.
Полые головки для кольцевого сверления отверстий большого диаметра позволяют использовать сердцевину отверстий и требу-
ют меньших затрат мощности и времени на обработку отверстий в сплошном материале по сравнению с обычным сверлением и последующим рассверливанием, зенкерованием и растачиванием.
Ступенчатое сверло для обработки крепежных отверстий имеет четыре ленточки на большом диаметре и обеспечивает точное расположение осей (±0,05 мм) и шероховатость поверхности Ra
2,5...
125 мкм.
Большое распространение получили центровые сверла, позволяющие одновременно обрабатывать цилиндрическую и коническую части центровочных отверстий. Промышленность выпускает сверла с углом базового конуса 60 и 75°, с двойным базовым конусом 60 и 120°, с радиусной базовой поверхностью.
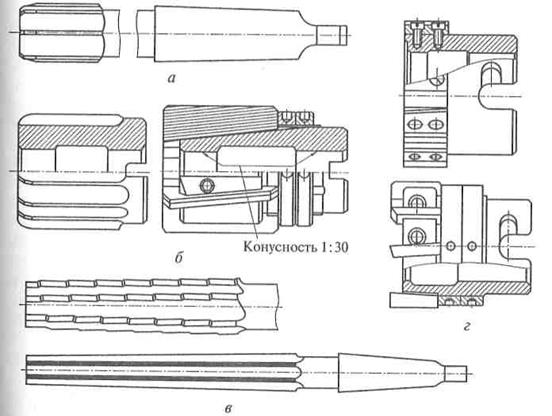
2.2. Развертки
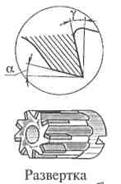 Для обработки точных цилиндрических и конических отверстий на станках сверлильной, токарной, расточной групп или вручную используют чистовой осевой инструмент — развертки, которые являются единственным инструментом для обработки точных отверстий малого диаметра. Для обработки точных цилиндрических и конических отверстий на станках сверлильной, токарной, расточной групп или вручную используют чистовой осевой инструмент — развертки, которые являются единственным инструментом для обработки точных отверстий малого диаметра.
На рис. 10 показаны основные типы разверток: цельные с цилиндрическим или коническим хвостовиком (рис. 10, а);
насадные для сквозных или глухих отверстий (рис. 10, б);
конические (рис. 10, в);
специальные для борштанг (с нерегулируемыми и регулируемыми ножами) (рис. 10, г).
В зависимости от характера обрабатываемого материала применяют развертки с пластинками из быстрорежущей стали или твердого сплава.
Режущая часть сварных разверток выполняется из быстрорежущих сталей, хвостовик — из стали 45.
Ручные развертки
изготавливают из инструментальной стали 9ХС в двух исполнениях: развертки с прямыми канавками диаметром 1...50 мм и
 развертки с винтовыми канавками диаметром 6... 50 мм. развертки с винтовыми канавками диаметром 6... 50 мм.
Рис. 10. Развертки:
а -
цилиндрическая с коническим хвостовиком; б -
насадная; в -
коническая; г -
специальная для борштанг
Хвостовик у разверток цилиндрический, заканчивающийся квадратом. Особенностью разверток является длинная рабочая часть, что обеспечивает их хорошее направление и центрирование по обрабатываемому отверстию.
Конические развертки
предназначены для предварительной и чистовой обработки конических отверстий с конусностью 1:50; 1:30; 1:20; 1:16 и конусами Морзе. Особенностью конических разверток является отсутствие калибрующей части. Развертки для отверстий под конические штифты с конусностью 1:50 изготавливают только чистовыми, остальные – черновыми и чистовыми. На режущих кромках черновых разверток нанесены стружкоразде-лительные канавки в виде прямоугольной резьбы.
Для удобства измерения реального размера разверток с помощью микрометра все их виды выполняют с четным числом зубьев, однако при равномерном шаге между зубьями возможна огранка обработанного отверстия. Поэтому у разверток зубья выполняют с неравномерным окружным шагом. Только одна пара зубьев лежит в диаметральной плоскости, она и показывает реальный диаметр развертки.
2.3. Зенкеры и зенковки
 С помощью зенкеров обрабатывают цилиндрические отверстия, полученные сверлением, отливкой, ковкой, штамповкой, с целью придания им более правильной геометрической формы, повышения размерной точности и уменьшения шероховатости поверхности. С помощью зенкеров обрабатывают цилиндрические отверстия, полученные сверлением, отливкой, ковкой, штамповкой, с целью придания им более правильной геометрической формы, повышения размерной точности и уменьшения шероховатости поверхности.
Зенкеры бывают следующих типов (рис. 11): со спиральным зубом, коническим и цилиндрическим хвостовиком (быстрорежущие или с пластинками твердого сплава); со спиральным зубом (насадные и цельные); насадные со вставными ножами и быстрорежущие; насадные, оснащенные твердым сплавом; для цилиндрических углублений (цельные и съемные); для зачистки торцовых поверхностей (пластинчатые или со вставными ножами); специальные для борштанг.
Материал корпуса зенкера — сталь 40Х.
В зависимости от назначения отечественная промышленность выпускает следующие разновидности зенкеров:
· цельные с коническим хвостовиком, трехзубые, номинальный диаметр 10...50 мм;
· твердосплавные, с коническим хвостовиком, трехзубые, номинальный диаметр 14...50 мм;
· цельные насадные, четырехзубые, номинальный диаметр 42...80 мм;
· насадные со вставными быстрорежущими ножами или вставными ножами из твердого сплава, номинальный диаметр 50... 100 мм, число зубьев — от 4 до 6.
Для обработки опорных поверхностей под крепежные винты применяют зенковки
со сменной цапфой (рис. 11, ж).
Диаметр цапфы выбирают в зависимости от диаметра основного отверстия. Зенковки с цилиндрическим 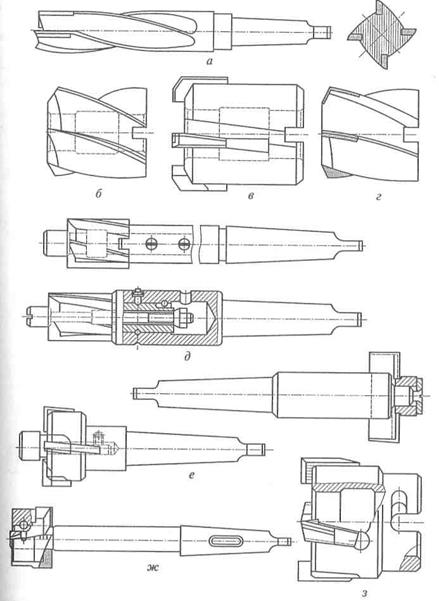
Рис. 11 Зенкеры (а — е, з)
и зенковка (ж): а
— /цилиндрический с винтовой канавкой и пластинами твердого сплава; б —
насадный цельный; в
— насадный со вставными ножами; г
— насадный с твердосплавными ножами; д
— цельный и съемный для цилиндрических углублений; е
— пластинчатый со вставными ножами для обработки торцов; ж
— обратная с штифтовым замком; з
— специальный для борштанг
хвостовиком выпускают диаметром 15; 18; 20; 22 и 24 мм, зенковки с коническим хвостовиком — 15; 18; 20; 22; 24; 26; 30; 42; 43; 44; 46 и 50 мм.
Библиографический список
1. Ансеров, Ю.М. Машины и оборудование машиностроительных предприятий: Учебник для инженерно-экономических специальностей вузов / Ю.М. Ансеров, В.А. Салтыков, В.Г. Семин. – Л.: Политехника, 1991.-365с.
2. Петруха, П.Г. Технология обработки конструкционных материалов: Учеб. для машиностр. спец. вузов / П.Г. Петруха, А.И. Марков, П.Д. Беспахотный и др.; Под ред. П.Г. Петрухи. – М.: Высш. шк., 1991.-512 с.
3. Тепинкичиев, В.К. Металлорежущие станки: Учебник для вузов / Н.С. Колев, Л.В. Красниченко, Н.С. Никулин, А.С. Проников, В.К. Тепинкичиев, А.А. Тихонов, Ю.А. Шувалов. – М.: Машиностроение, 1972. – 471с.
4. Виноградов, В.М. Технология машиностроения: Введение в специальность: учебное пособие для студентов вузов / В.М. Виноградов. – 2-е изд., стер. – М.: Издательский центр «Академия», 2007. – 176 с.
|