Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Кузбасский государственный университет
Кафедра электропривода и автоматизации
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к дипломной работе
Тема работы:
Разработка и монтаж лабораторного стенда на основе преобразователя
ЭТ6
Автор проекта
: студент группы ЭА-022
Бурзянцев А.В.
Проверил: к.т.н, доцент кафедры ЭПА
Сидельцев С.В.
Кемерово 200
7
Содержание
Введение
1. Описание электропривода
1.1 Основные технические данные и условия работы
1.2 Конструкция электропривода
2. Устройство и принцип работы
2.1 Структурная схема электропривода
2.2 Принцип работы электропривода
3. Состав тиристорного преобразователя и принцип работы его составных частей [2]
3.1 Силовая схема
3.2 Схема формирования управляющих импульсов
3.3 Регулятор скорости
3.4 Регулятор тока с датчиком тока и схемой ограничения производной
напряжения на выходе регулятора
3.5. Схема ограничения минимального угла управления
3.5 Схема ограничения минимального угла управления
3.6 Схема ограничения тока якоря
3.7 Схема защиты
Приложение 1
Приложение 2
Введение
Много внимания уделялось поиску возможностей замены электромашинных преобразователей статическими вентильными преобразователями. В свое время получила некоторое распространение система управляемый ртутный выпрямитель – двигатель (УРВ–Д). Однако особенности ртутных вентилей не позволили этой системе успешно конкурировать с системой Г–Д. Эта задача получила успешное решение только после создания полупроводниковых кремниевых вентилей и совершенных систем импульсно-фазового (СИФУ) управления на базе микроэлектроники, которые позволили разработать тиристорные преобразователи с высокими техническими показателями [1].
Лабораторный стенд собран на основе серийно выпускаемого унифицированного электропривода серии ЭТ6 и представляет собой автоматизированный электропривод постоянного тока. Стенд служит для изучения и исследования параметров работы электропривода и снятия осциллограмм контрольных точек и показаний приборов. Он предназначен для регулирования и стабилизации частоты вращения электропривода постоянного тока в диапазоне 1:10000.
Реклама

1.
Описание электропривода
1.1 Основные технические данные и условия работы
Электропривод предназначен для работы в закрытых отапливаемых помещениях при следующих условиях:
·высота над уровнем моря не более 1000 м;
·температура окружающего воздуха (внутри шкафа) от +5 до +45°С;
·относительная влажность окружающего воздуха 80% при температуре 30°С.
Окружающая среда невзрывоопасная, не содержащая токопроводящей пыли, агрессивных газов и паров в концентрациях, разрушающих металлы и изоляцию. Содержание масел, пыли – в пределах санитарных норм.
Основные технические параметры электропривода указаны в табл. 1.
Таблица 1
| Наименование параметра |
Ед. измерения |
Требования техническихусловий |
| Напряжение сети |
В |
380 (+10–15) % |
| Частота сети |
Гц |
50±1 |
| Мощность электродвигателя |
кВт |
0,6 11,3 11,3 |
| Максимальный диапазон регулирования частоты вращения электродвигателя |
10000 |
Электропривод обеспечивает работу во всех 4-х квадрантах механической характеристики при изменении управляющего напряжения в пределах ±10В.
1.2 Конструкция электропривода
Электропривод серии ЭТ6 состоит из тиристорного преобразователя, электродвигателя со встроенным тахогенератором, согласующего трансформатора серии ТСТ, задатчика частоты вращения и токоограничивающих реакторов РТ.
Электропривод конструктивно представляет собой комплектное устройство, выполненное в открытом исполнении (степень защиты IP00) и предназначенное (кроме электродвигателя) для встройки в шкаф.
Преобразователь имеет блочную конструкцию, обеспечивающую оперативную замену блоков и возможность ремонта или замены отдельных элементов.
Внешний вид преобразователя приведен на рис. 1.
В электроприводе применены электроизоляционные материалы класса нагревостойкости не ниже В.

Рис.1. Преобразователь тиристорный
2. Устройство и принцип работы
2.1 Структурная схема электропривода
Электропривод серии ЭТ6 представляет собой электромеханическое устройство, служащее для регулирования и стабилизации частоты вращения электродвигателя постоянного тока в диапазоне 1:10000.
Структурная схема электропривода приведена на рис. 2.1, где:
РС – регулятор скорости;
РТ – регулятор тока;
Uто
=f(n) – узел зависимости токоограничения;
ТП – тиристорный преобразователь;
ДТ – датчик тока;
ДС – датчик скорости;
Rэ
– эквивалентное сопротивление якорной цепи;
Тя
– электромагнитная постоянная времени;
Тм
– электромеханическая постоянная времени;
К – конструктивный коэффициент;
Uз
– задающее напряжение;
Uогр
=f(Uc
) – узел ограничения минимального угла управления;
Uдс
– напряжение датчика скорости;
ΔU1
– разность (Uз
–Uдс
);
Uрс
– напряжение на выходе регулятора скорости;
Uто
– напряжение узла токоограничения;
Uдт
– напряжение на выходе датчика тока;
Реклама

ΔU2
– разность (Uрс
–Uдт
);
Uрт
– напряжение на выходе регулятора тока;
Uя
– напряжение на якоре двигателя;
Iя
– ток якоря двигателя;
n – частота вращения электродвигателя;
М – двигатель;
Принципиальная электрическая схема приведена в Приложении 1.
2.2 Принцип работы электропривода
Электропривод состоит из двух замкнутых контуров подчиненного регулирования: контура тока (РТ) и контура скорости (РС).
Работа электропривода осуществляется следующим образом:

Рис. 2.1 Структурная схема электропривода
При наличии рассогласования (ΔU1
) на входе регулятора скорости (РС), на его выходе формируется сигнал, пропорциональный этому рассогласованию, который, сравниваясь с текущим значением тока якоря, поступает на вход регулятора тока РТ. Регулятор тока усиливает эту разность и подает управляющее напряжение на схему формирования управляющих импульсов (СИФУ), функция которой заключается в формировании и распределении импульсов управления силовыми тиристорами. По мере уменьшения рассогласования (под действием отрицательной обратной связи по частоте вращения) происходит стабилизация часты вращения двигателя на уровне, пропорциональном напряжению задания (Uз
). Коэффициент усиления системы регулирования обеспечивает необходимый диапазон регулирования и достаточную точность поддержания частоты вращения при различных возмущающих воздействиях.
Ограничение тока якоря двигателя осуществляется путем ограничения напряжения выхода регулятора скорости.
Предусмотрено зависимое ограничение тока в функции частоты вращения.
тиристорный преобразователь автоматизированный электропривод
3. Состав тиристорного преобразователя и принцип работы его составных частей [2]
Тиристорный преобразователь является управляемым двухполярным, шестипульсным выпрямителем, состоящим из:
силовой схемы;
схемы формирования управляющих импульсов;
схемы усилителя – регулятора скорости;
схемы усилителя – регулятора тока с датчиком тока и схемой ограничения производной РТ;
схемы ограничения минимального угла управления;
схемы ограничения тока якоря;
схемы защиты;
источника питания;
схемы дополнительного усилителя.
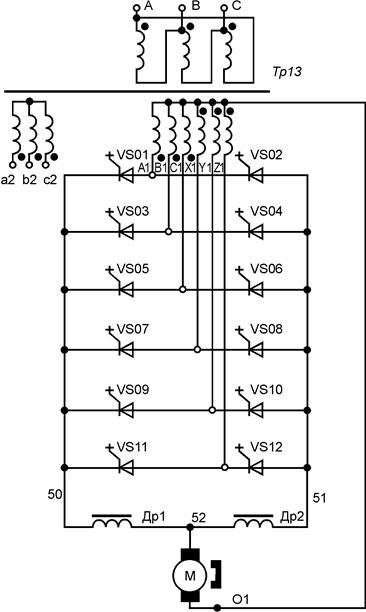
3.1 Силовая схема
Силовая схема (см. Приложение 2) и состоит из:
согласующего трансформатора типа ТСТ (Тр13);
управляемого выпрямителя;
токоограничивающих реакторов РТ (Др1, Др2).
Трансформатор трехфазный ТСТ имеет две силовые обмотки и обмотку для питания цепей управления. Первичная обмотка соединена в треугольник, вторичная – шестифазную звезду с нулевым выводом, третья обмотка – в звезду.
3.2 Схема формирования управляющих импульсов
Схема формирования управляющих импульсов (СИФУ) осуществляет формирование и распределение управляющих импульсов на тиристоры силовой схемы и состоит их шести идентичных каналов управления. Схема СИФУ приведена на рис. 3.1.

Рис. 3.1 Схема формирования управляющих импульсов
Принцип работы
схемы рассмотри
м на примере работы канала фазы
Al.
О
тфильтро
ванное опорное напряжение синусоидальной
формы снимается с конденсатора
С101
и чере
з резис
тор R
103
пода
ется на вход ну
ль-
органа
DA101.
Н
уль-орган выполнен на интегральном
опе
рационном усилителе с большим коэ
ффици
ентом усиления.
Момент
ы време
ни переключения нуль-органа
DА101 выделяются диффе
ренцирующей цепочкой
R
105, С
105
, С106, производные напряжения усиливаются транзисторами V
T101,
VT
102 и через импульсный трансформатор TV
02 поступают на управление тиристоров анодной группы, а импульсы, усиленные транзистором V
T103,
через импульсный транс
форматор T
V01 поступают на управление тирис
тором катодной группы. Р
езисторы R
13 и R
14 служат для ограничения тока через первичные обмотки
импульсных
транс
форматоров и являются общими для всех ш
ести каналов СИФУ.
Ширина импульса 10–15 электрических градусов.
3.3 Регулятор скорости
Регулятор скорости (см. рис.
3.2.)
представляет собой многокаскадный усилитель постоянного тока с цепями обратной
связи, собранный на трех микрос
хемах. Первый
каскад состоит из двух интегральных уси
ли
телей
DА301,
DА302. Структура первого каскада и соответствующий
выбор
входящих в его состав
элементов обеспечили термостабильность хар
актер
истик электропривода за счет компенсации теплов
ого дрей
фа
усилителя
DA301 параллельно в
ключенным у
силителем
DА302
. В
торой кас
кад, собранный
на операционном усилителе
DА303, служит для получения
необходимого коэффициента усиления
усилителя
– регулятора скopoсти.
Схема работает следующим образом. Сигнал задания снимается со средней точки делителя, собранного на резисторе RV, и подается на неинвертирующие входы DA301 и DA303, представляющие собой суммирующий усилитель. На вход 90 подается сигнал от тахогенератора и с помощью резистора R302 осуществляется нормирование этого сигнала. На вход 91 подается сигнал задания. С выхода DA301 сигнал поступает на инвертирующий вход DA303, на неинвертирующем входе которого сигнал пропорциональный заданию. На выходе DA303 (точка 156) сигнал – напряжение, соответствующее заданной частоте вращения, поступает на вход регулятора тока, выполненного на ОУ DA601.

Рис. 3.2 Регулятор скорости.
Цепи подстроек и коррекции:
R323, R324 – резисторы смещения «нуля» усилителя;
R302, R307 – резисторы подстройки максимальной скорости;
R319, R320, C315, С316, С317 – элементы коррекции скоростного контура, которые подбираются в процессе наладки.
3.4 Регулятор тока с датчиком тока и схемой ограничения производной напряжения на выходе регулятора
Регулятор тока (
рис.
3.3)
выполнен на операцион
ном ус
или
теле
DА601 и предс
тавляет собо
й пропорционально интегральны
й регулятор. Дат
чик тока предназ
начен для передачи на вход регулятора тока
сигнала
об
ратной
связи, пpoпopциoнaльнoго тoку
якоря двигате
ля.
Схема работает следующим образом. Сигнал с выхода РС, пропорциональный рассогласованию (UЗ
–Uдс
), поступает на R602 и через R603 подается на инвертирующий вход DA601. На неинвертирующий вход поступает сигнал, соответствующий минимальному углу управления (точка 155). На DA601 происходит сравнение этих сигналов и при превышении сигнала, подаваемого на 155 вход (неинвертирующий вход DA601) на выходе DA601 появляется сигнал отрицательной полярности, пропорциональный разности сигналов от РС и обратной связи по току, подаваемый в схему формирования управляющих импульсов.
Сигнал, соответствующий току якоря, снимается с шунта. Этот сигнал поступает на DА501, где производится выделение и усиление модуля напряжения, пропорционального току якоря. Это напряжение подается на делитель, собранный на R601, R602 и R603, и сравнивается с сигналом от РС. Балансировка
датчика тока производится
резистором
R
506.
Схема ограничения производной
(СОП)
входит в конту
р регулирования тока якоря и осуществляет
ограничение наибольшего значения производной
напряжения на выходе РТ
с целью ис
ключения динамичес
кого уравнительного тока. СОП состоит
из дифференцирующей цепочки R705 – С704, операционного ус
илителя
DА701,
стабилитрон
а VD
701, делителя R
701,
R702.
С
хема работает следующим образом. В
ыходной сигнал
на выходе регулятора
тока дифференцируетс
я при величи
не выходного напряж
ения
DА701, большей, чем напряжение проб
оя стабилитрона
VD701, поступает на неинвертирующий в
ход усилителя РТ
DА601, осуществляя ограничение
производной
выходного с
игнала РТ
на заданном уровне.
3.5 Схема ограничения минимального угла управления
Схема ограничения минимального угла управления (рис. 3.4) предназначена для исключения превышения напряжения на выходе РТ амплитудой опорного напряжения питающей сети.

Рис. 3.3 Регулятор тока и схема ограничения производной напряжения на выходе регулятора.
Схема работает следующим образом: опорные синусоидальные
напряжения вс
ех шести фаз с точки 17
подаются на выпрямительный
мост VD403...VD414
. Резисторы R4
11 и R
415
служат для регулирования уровня ограничения (уставки
напряжения ограничения). Напря
жени
я с движков потенциометров R411, R415 пос
тупают на неинвертирующие
входы операционных
усили
телей
DА4
01, D
А402, на инвертирующие входы которых поступает через
делители R408, R
406 и резисторы R405, R
407 выходное напряжение регулятора тока. в
ыходные напряжения
DA401, DA402 через
диоды VD401, VD402 и резисторы R
401, R402 поступают на неинвертирующий вход операцион
ного
усилителя
DA
601 (регулятора тока).
Таким образом, усилители
DA401
,
DА4
02
образуют контуры отрицательной обратной связи усилителя -
регулятора тока, которые включаются при достижении напряжения на выходе делителей R4
08, R
406 величины напряжения уставки
ограничения и предотвращают дальнейший рост напряжения на выходе РТ.
В динамических режимах и при изменении напряжения питающей
сети величина напряжения уставки меняется пропорционально изменению величины опорных напряжений и тем самым обеспечивает исключени
е превышени
я напряжения управления (регулятора тока
) уровня опорных напряжении.
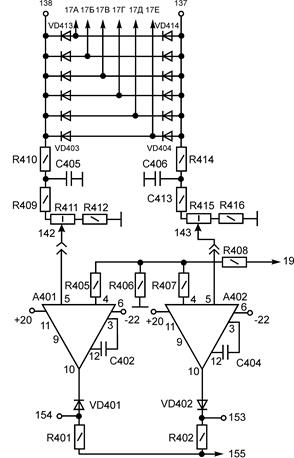
Рис. 3.4 Схема ограничения минимального угла управления
3.6 Схема ограничения тока якоря
Схема ограничения тока якоря (см. рис.
3.5) обеспечивает, в зависимости
от настройки, ограничение тока якоря на заданном уровне и зависимое
ограничение тока в функции частоты вращения.

Рис. 3.5 Схема ограничения тока якоря
Принцип работы токоограничения
основан на ограничении выходного напряжения регулятора тока, которое пропорционально частоте вращения якоря двигателя. При работе токоограничения в режиме, независи
мом от частоты вращения якоря, выводится нуль-резистор
R
305
. В
еличина уставки задается резистором R
213.
Схема работает следующим образом.
Напряжение тахогенератора
через делители R
304, R
305 подается на схему выделения модуля, выполненную
на микросхеме DА20
1, с выхода которой снимается сигнал положительной полярности, пропорциональный напряжению тахогенератора. Этот сигнал подается на вход уз
ла аппроксимации, выполненного на элементах R
207,
R210, R
208, R
209, R
211,
VD203.
Точка перегиба определяется величиной напряжения подпора диода V
D203
и регули
руется в зависимост
и от типа
применяемого электродвигателя резистором R208.
В результате суммирования напряжения усилителя
DА2
01, напряжений
узла аппроксимации и смещения усилителя
DА2
02 на выходе формируется напряжение подпора диода
VD205 заданной
величины. Величина
смещения определяет максимальны
й ток уставки
и регулируется резистором R
213.
Для ограничения сигнала регулятора скорости другой полярности напряжение подпора диода VD
206 формируется инвертором
DА203, подключенным к вы
ходу
DА202. Диод
VD204 ограничивает величину отрицательного напряжения на вы
ходе
DА202.
3.7 Схема защиты
Схема защиты (см.
рис.
3.6) предназначена для осущес
твления защиты электропривода от неправильного чередования фаз питающей
сети, обрыва любой из
фаз, от исчезновения стабилизированного питания любой полярности, от перегрева электродвигателей типа ПБВ
.
Схема состоит из фазосдвигающего
конденсатора С9
09, транзисторных клю
чей
VТ905,
VТ906, схемы совпадений нaVD
910, VD
911,
VT907, R925, R
926, интегрирующего конденсатора С
911, транз
истора VT
908, реле К1, К
2, и
ндикатора
VD914
, сигнализ
иру
ющего о наличии управляющих импульсов на тиристорах,
а следовательно, и наличии напряжения на выходе тиристорного
преобразователя, опасного
для обслуживающего
персонала, и терморезистора, встроенного в двигатель.
В исходном состоянии транзистор V
T907 заперт и цепь приготовлена для включени
я реле К1, К2. При нажатии
кнопки
S
ВC «Пуск» включ
ается реле, загорается индикатор состояния привода, размыкается цепь обратной
с
вяз
и регуля
торов и подаются
управляющие импульсы на тирис
торы силовой
схемы - проис
ходи
т запуск электропривода. В с
луч
ае неисправности в стабилизаторе напряжения ил
и при неправильном
подключении к питающей сети не подается управляющий
с
игнал транзистору VT
908 и не включаются
реле Kl, К2.

Рис. 3.6 Схема защиты
Список литературы
1.Ключев В.И.. Теория электропривода: Учеб. для вузов.–2-е изд. перераб. и доп. – М.: Энергоатомиздат, 2001.–704 с.: ил.
2.Электропривод постоянного тока серии ЭТ6. Паспорт ИЖВЕ 654632. 003ПС.
Приложение 1

Схема электрическая принципиальная
Приложение 2
|
