І. ЗАГАЛЬНА ЧАСТИНА
1.1 Вступ
В наш час індустріального розвитку широкого розповсюдження набули механізми, пристрої, станки та верстати в яких використовується рух подач чи переміщень за допомогою стислого повітря.
Як відомо, повітря має властивість стискатися до певної величини, що є не дуже добрим в порівнянні з гідравлічними приводами, але при використанні має перевагу в тому, що повітря не потребує заміни.
В результаті швидкого прогресу виробничих процесів всіх галузів машинобудівної промисловості зростають вимоги до роботи машин. Розширюється коло задач при їх виборі, експлуатації і створенню.
В сьогоднішній час підприємства обладнуються високо продуктивним і економічним обладнанням. Продуктивність праці а також ефективність використання обладнання залежить в значній мірі від правильності прийомів роботи, огляду за обладнанням і якості налагоджувальних робіт. Тому оператор повинен вірно володіти раціональними прийомами робіт, вміти правильно вибирати оптимальний технологічний процес і режим в залежності від використовуючих матеріалів, виконувати операції по наладці і розмірній настройці обладнання, підбирати й встановлювати робочі інструменти.
1.2 Конструкція, робота та експлуатаційні характеристики
Компресор складається з картера, двох циліндрів і головки блока. В середині його міститься кривошипно-шатунний механізм, до складу якого входить колінчастий вал, шатуни і поршні. Кожний поршень має по два компресорних і маслозбиральних кільця. У верхній частині кожного циліндра в клапанній плиті, що відділяє циліндри від головки блока, розташовано по два клапани: всмоктувальний і нагнітальний. Внутрішній простір головки блока поділений спеціальною перегородкою на дві зони: всмоктувальну і нагнітальну. Зовнішня поверхня компресора обладнана ребрами для його охолодження.
Під час роботи компресора, коли поршень рухається вниз, у циліндрі створюється розрідження. У цей момент всмоктувальний клапан під дією атмосферного тиску повітря відкривається і воно заповнює внутрішній простір циліндра. Під час руху поршня вгору повітря стискується і притискує всмоктувальний клапан до сідла так, що отвір, крізь який надходило повітря, повністю закривається. Під час наступного руху поршня стиснуте повітря натискає на нагнітальний клапан, який відкривається, і через трубопровід виштовхується у ресивер.
Реклама

Ресивер призначений для створення запасу повітря, зменшення пульсації і часткового очищення його від парів води і масла. У нижній частині ресивера розміщений спускний кран, через який періодично зливають конденсат, що збирається на дні. З ресивера повітря надходить у масловологовіддільник, де остаточно очищується. Всередині масловологовіддільника знаходяться кільця Рашига, на яких осідають частинки води і масла. Конденсат стікає у ресивер. Далі стиснуте повітря подається по шлангах, які приєднують до двох кранів з штуцерами, розміщених на масловологовіддільнику.
Технічна характеристика компресорної установки
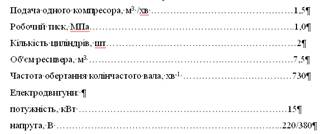
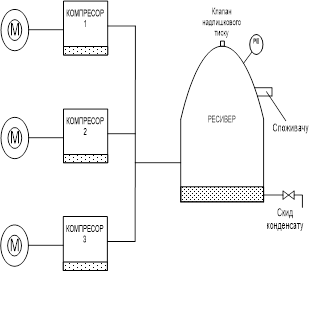
Рис. 1. Загальний вид компресорної лінії.
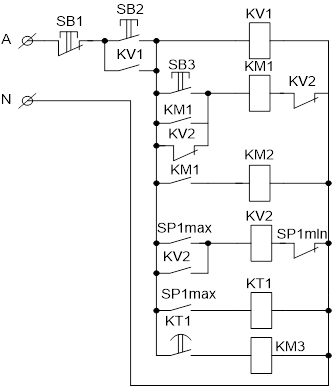
Рис. 2. Схема електрична принципова до модернізації.
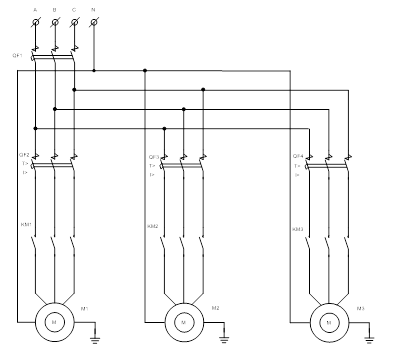
Рис. 3. Схема електрична силова до модернізації.
Схема управління працює таким чином: при натисненні на кнопку SB2 схема стає в пам‘ять і одночасно вмикається двигун компресора 1, а потім і компресора 2. Оператор керує тиском за допомогою кнопок управління, відповідно до показів манометра тиску. В разі якщо тиск за допомогою двох компресорів не доходить до норми технологічного процесу оператор за допомогою кнопки SB3 – вмикає двигун компресора 3 , що повинен дати змогу вийти в системі на робочий тиск.
1.3 Огляд основних направлень та технічних рішень при модернізації
При вивченні принципу роботи і конструкції роботи пневмостанції мною було виявлено ряд недоліків, які пов‘язані в першу чергу з незначною точністю роботи , відсутністю контролю режимів роботи обладнання і аварійних режимів та відсутності гнучкої наладки обладнання та контролю основних параметрів .
Таким чином основні напрямки на модернізацію являються:
1. Оптимізація роботи компресорної установки.
2. Контроль роботи електродвигунів та роботи компресорів.
3. Контроль рівня мастила в картерах компресорів та конденсату у ресивері.
4. Аварійна сигналізація та і індикація роботи маслостанції
1.3.1 Для оптимальної роботи автоматичної лінії контролю компресорів слід використати блок управління на базі мікроконтроллера. Мікроконтроллери характеризуються гнучкістю налаштування та програмування, мають високу точність обробки даних та швидкодію. Мають можливість підключення допоміжних пристроїв. Блок управління компресорної станції повинен виконувати такі задачі: розподіл навантаження на двигуни компресорів згідно використання стислого повітря, контроль роботи двигунів, забезпечувати неперервну подачу стислого повітряна навіть тоді, коли вийшли з ладу два двигуни.
Реклама

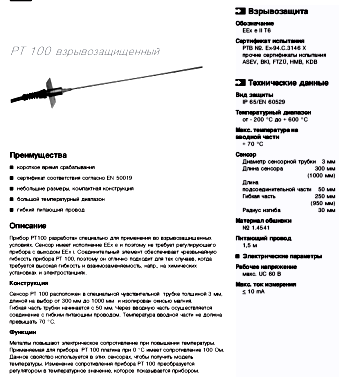
1.3.2 Контроль роботи двигунів та компресорів повинен забезпечуватися за рахунок контролю теплового режиму роботи. Для цього слід використати датчики температури. Для простоти кріплення та функціональності використовую термометри опору.
Термометр опору –- датчик виміру температури. Принцип дії заснований на вимірі каліброваного мідного або платинового опору. Найпоширеніші градуювання в промисловості: 50П, 50М, 100М, 100П. Градуювання 21, 23 –- є застарілими. Найбільш точними й стабільними в часі є термометри опору на основі платинового дроту або платинового напилювання на кераміку. Найбільше поширення на заході одержали PT100 (опір при 0°С - 100Ω) PT1000 (опір при 0°С - 1000Ω) (IEC751). Залежність від температури майже лінійна й підкоряється квадратичному закону при позитивній температурі й рівнянню 4 ступеня при негативних. Температурний діапазон -200 +800°С.
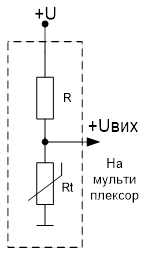
Рис.1. Схема підключення датчика температури
Для підключення датчиків використовується мультиплексор моделі КР 531 КП2
Мікросхема являє собою здвоєний селектор – мультиплексор 1 із 4 з загальними входами вибору даних і роздільними входами стробування.
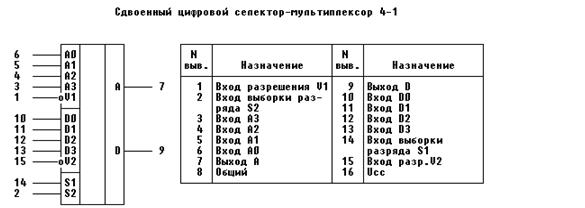
Суть роботи така: маємо чотири входи і один вихід. На входи S1 та S2 подається комбінація вибору каналу підключення на канал виходу по високим або низьким рівням сигналу.
В принциповій схемі використовується лише один блок селектора – мультиплексора, тому використовується дві такі мікросхеми.
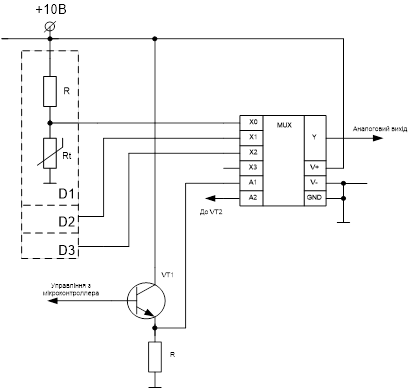
Рис. 2. Схема підключення мультиплексора
Одна з умов роботи мультиплексора, потрібно щоб на керуючі входи S1 та S2 подавалися логічні рівні сигналу з напругою, яка повинна бути рівна напрузі живлення мікросхеми, а напруга живлення повинна бути рівна максимальній напрузі входу мікросхеми, тобто виходу з датчика, але не перевищувати критичну напругу живлення мікросхеми. Для цього і використана розв’язка на транзисторах, щоб 5 В виходу управління з мікроконтроллера перетворити на 10 В управління.
1.3.3 Для довготривалої роботи компресорів потрібно контролювати контрольні рівні мастила в картерах, а саме мінімальний рівень мастила в ємності живильника, а також рівень конденсату в ресивері
Для контролю рівня потрібно використати датчик, котрий виконуватиме роль сигналізації та регулювання режиму роботи блоку, тобто своїми контактами діяти в схему управління та виконувати поставлені задачі.
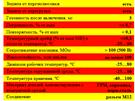
Для контролю та сигналізації рівня будуть застосовуватися акустичні датчики граничного заповнення типу LP-T50-UP6X3-H1151 фірми TURCK.
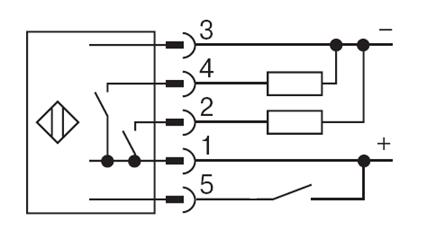 Рис. 2. Схема підключення датчика рівня.
Контакти клемника датчика:
5 - навчання
4 – головний вихід
2 – додатковий вихід
3 – корпус(мінус)
1 – живлення
Схемою управління будуть лише використовуватися контакти № 3,4 та контакти подачі живлення. Основні параметри датчика (див. додаток, табл. № 11).
Для контролю тиску в пневмосистемі слід використати мембранний метод. Тому що він має найкращі характеристики та широко розповсюджений, надійний.
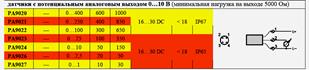
Обираю датчик тиску РА9020 котрий має робочий тиск до 400 бар та вихідний аналоговий сигнал в діапазоні 0…10 В.
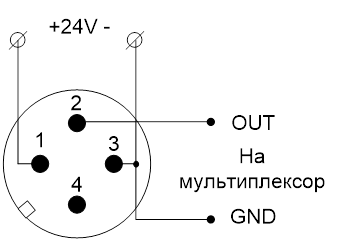
Рис.3. Електрична схема підключення датчика:
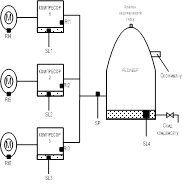
Рис. 4. Схема розміщення датчиків на компресорній станції
1.3.4 Так , як силова схема захищається автоматичними вимикачами, то слід застосувати захист від КЗ шляхом під‘єднання до логічних мікросхем контактів автоматів. Таким же чином буде під‘єднуватися реле напруги.
Спрацювання цих елементів буде фіксуватися електричною схемою захисту , а та в свою чергу вмикатиме алгоритм роботи мікроконтроллера для запуску іншого робочого двигуна, а при обриві фаз вимикатиметься робота силової схеми та вмикатиметься відповідна світлова сигналізація.
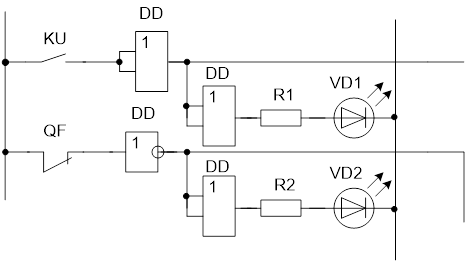
Рис.5. Схема сигналізації аварійних режимів.
2. ПРОЕКТНО-РОЗРАХУНКОВА ЧАСТИНА
2.1 Технічні умови на проектування
Комутація двигунів симісторами. Елементи схеми управління на ІМС з узгодженням з обтронами.
Кількість ресиверів – 1 шт.
Ємність ресивера – 12 м3
.
Робочий тиск на виході – 10±0,1 атм.
Кількість компресорів – 3 шт.
Забезпечити захист:
Від КЗ в схемі, обриву фаз, критичного рівня масла в картері, критичної температури на виході, критичного рівня конденсату в ресивері, передбачити автоматичний скид конденсату з ресивера.
Схема принципова повинна забезпечити автоматичний режим роботи та автоматичний запуск компресорів при пониженому тиску до вирівнювання з необхідним тиском.
2.2 Розробка і розрахунок циклограми робочих органів
Схемою електричною принциповою передбачено автоматичне вмикання компресорів при значному падінні вихідного тиску в пневмосистемі та запуску іншого двигуна при виході з ладу іншого двигуна.
2.3 Розробка циклограми вхідних та вихідних елементів
Вхідні елементи
SB1 – Загальний стоп
SB2 – Перевірка стану обладнання
SB3 – Запуск системи управління
SP – датчик контролю тиску
SL1…3 – Датчик рівня масла в картерах
SL4 – Датчик рівня конденсату в ресивері
QF2 – автомат несправності двигуна М1
QF3 - автомат несправності двигуна М2
QF4 - автомат несправності двигуна М3
KU – реле напруги
Вихідні елементи.
VS1-3 – Привод двигуна М1
VS4-6 – Привод двигуна М2
VS7-9 – Привод двигуна М3
YA1 – Електромагніт скиду конденсату
2.4 Розробка циклограми вхідних та вихідних елементів
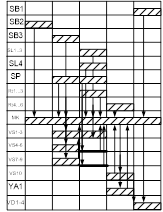
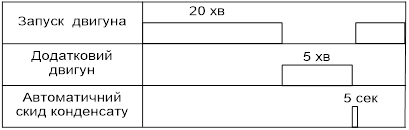
Рис. 6. Циклограма вхідних та вихідних елементів
2.5 Розробка математичної моделі схеми управління

2.6 Розробка схеми електричної принципової
Схема електрична принципова складається з мікроконтроллера, двох АЦП та двох мультиплексорів які в об‘єднанні складають блок контролю та управління технологічних параметрів. Програмно мікроконтроллер опитує кожен з датчиків на предмет виміру вихідного параметру шляхом подачі управляючого сигналу на входи А1 та А2 мультиплексорів. На входи мультиплексорів під‘єднуються аналогові датчики температури та аналоговий датчик тиску.
Схема працює таким чином:
Оператор, перш ніж запустити систему натискає кнопку SB2 – котра перевіряє стан роботи системи і запускає її в режим очікування. Для запуску системи натискають на кнопку SB3. Алгоритмом роботи запускаються всі двигуни і працюють до тих пір, поки не настане робочий тиск, і після цього вимикаються і за релейним законом підтримують тиск на виході. По мірі витрати тиску вмикається відповідна кількість двигунів. При виході з ладу одного з двигуна запускається інший, а цей ремонтують не вимикаючи системи та підтримуючи відповідний тиск. Системою передбачено контроль температур двигунів та компресорів, при спрацюванні відповідного вмикається інший двигун з компресором, а в якому підвищена температура йде на охолодження чи на відповідний ремонт. При критичних режимах, коли наявна несправність двигуна чи його КЗ спрацьовує контакт автоматичного вимикача та індикується відповідний світлодіод. В такому випадку вмикається інший робочий двигун. При обриві фаз робота силового блоку неможлива, тому блок вимикається.
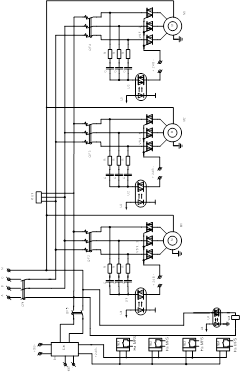
Рис. 7. Схема електрична принципова силова
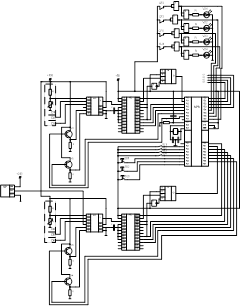
Рис. 8. Схема електрична принципова управління
2.7 Розрахунок та вибір елементів контролю та регулювання , силового обладнання та захисту на базі ПК з використанням електронної бази даних
2.7.1 Розрахунок двигуна компресорів
Дані по дослідженню компресорної установки.
| t, сек |
0 |
156 |
500 |
679 |
906 |
1250 |
1625 |
2200 |
3000 |
| Р, атм |
0 |
2 |
4 |
5 |
6 |
7,5 |
8,5 |
9,7 |
10 |
Характеристики та параметри об‘єкту регулювання1. Об‘єкт самовирівнювальний.
2. Одноємнісний.
3. Постійна часу Т=500 с.
4. Час досягнення часу – 3000 с.
5. Ємність об‘єкту Соб.
6. Коефіцієнт ємності К=Соб/Т.
7.Передатна функція W(S)=k/Tp+1.
Формула розрахунку двигуна приводу компресора.
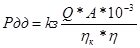
Q – продуктивність = V/t
t=3000c
P=10 атм ( див. П.1.2)
V=7,5м3
( див. П.1.2)
ηк=0,8
ηп=0,9
kз=1,1
A=280дж/м3
(при умові, що Р=10 атм. – див. Зимин, стор. 454).

Вибираємо тип двигуна 4А180М8У3 (Рн
=15 кВт, n=730 об/хв., Ін=32,6А).
2.7.2 Вибір автомата двигунів компресорів
Для розрахунку струму спрацювання автомата , використовується формула (2. с 87. IV.4):
Іавт
=k х Iн
/а, А. (2).
де а – 0,8...3.
Ін- номінальний струм двигуна
k – кратність пускового струму до номінального.
Іавт
=7 х 32,6/1=230А
Струм теплового розчеплювача автомата розраховується за формулою (2, с. 89, IV.7):
Ітепл
= 1,1...2,5Ін (3).
Ітепл
=1,5 х 32,6=47А.
Обираю автомат типу BA88-37: Iт
=50 А, Iел
=230 А (струм спрацювання виставляється вручну).
2.7.3 Вибір силових симісторів двигунів компресорів
Для нормального запуску двигуна потрібно обирати симістори у яких робочий струм повинен перевищувати пусковий струм двигуна, щоб симістор в момент запуску не вийшов з ладу.
Робочий струм симістора розраховується за формулою (3. с 51).
Ісим
=(k*Ін)*X, A. (8).
де k – кратність пускового струму двигуна.
Ін – номінальний струм двигуна, А.
X – коефіцієнт запасу по струму (1,1...1,5).
Ісим
=(7 х 32,6) х 1,5=250 А.
Обираємо силові симістори типу ТС132-250.
2.7.4. Розрахунок резисторів та конденсаторів в колі оптронів та вибір оптронів.
Рспр=1Вт – потужність спрацювання симісторів
Uж=24В – напруга живлення в колі симісторів
В колі оптрона потрібно погасити напругу:
Uгас
=380-Uж
=380-24=356В.
Ігас
=Рспр
/Uгас
=1/356=0,0028А – струм гасіння в колі управління симісторів.
Розраховуємо опір гасіння:
R=Uгас
/Iгас
=356/0,0028=127кОм.
Обираю конденсатор ємністю 0,1мкФ з робочою напругою 500В котрий має опір частоті 50Гц:
Хс=1/2πfc=1/2 х 3,14 х 50 х 0,1 х 10-6
=32 кОм.
Опір резисторів рівний:
127-32=95кОм.
Найближчий номінал резистора рівний 100 кОм.
Потужність розсіювання резистора:
Рроз
=І2
х R=0.00282
х 100000=0,78 Вт
Найближчий номінал потужності росіювання рівний 1 вт.
Тому виходячи з робочих струмів в колі управління симісторами обираю оптрони типу МОС3081 для всіх двигунів (див.додатки табл. 5).
2.7.5 Вибір реле обриву фаз:
Для захисту обладнання необхідно контролювати зміну напруги в три-фазному колі. Для цього використовую реле контролю трифазних кіл, яке повинно мати велику швидкодію, просліджувати любі зміни напруги в колі. Згідно необхідних вимог обираю реле контролю трифазних кіл типу TRW400VN4X U=200…400B (див. додатки, табл. 6).
2.7.6 Вибір блоку живлення.
Для схеми управління необхідне живлення 5 В, 10 В та 24 В. Тому вибираю стабілізований здвоєнний блок живлення типу ABL-7RE2405 P=60 Вт (див. додатки, табл. 2).
2.7.7 Для схеми управління необхідно 3 кнопки, тому я обираю кнопки 21 типу U=25 B, Ik
=0,5 A.
2.7.8 Вибір електромагнітних клапанів
Потрібно використати електромагнітні клапани типу ПВДФ з витримкою тиску в 10 атм та з січним перерізом в 16 мм.
2.7.9 Вибір світлодіодів індикації.
Для індикації потрібні світлодіоди з напругою живлення 5 В, червоного кольору. Світлодіоди повинні бути підключені послідовно з опором, номінал якого лежить в межах 1–5 кОм.
2.8 Розрахунок та вибір електричного пульта управління
При розрахунку, виборі та розміщенні приладів на фасадах електричного пульта управління необхідно враховувати наступне:
1. Елементи аварійного вимкнення повинні мати зручну форму, для миттєвої дії на них.
2. Більш важку апаратуру розміщувати в нижній частині всередині пульта, щита.
3. Апаратуру, яка виділяє багато тепла розміщувати зверху пульта.
При розміщенні апаратури всередині пульта, щита між цією апара-турою повинна бути передбачена відстань для:
1. Монтажу.
2. Шильників з’єднувальних проводів, джгутів і т.д.
3. Підключення проводів до електроапаратури.
4. Встановлення шильників, бірочок функціонального чи схематичного призначення приладів.
5. З урахуванням „мертвих” зон пультів – 50 мм з кожної сторони.
6. З урахуванням коефіцієнту запасу між кожним елементом – 1,2…1,3.
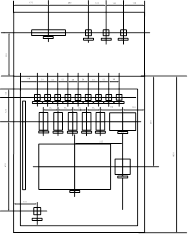
Рис. 9 Схема розміщень елементів.
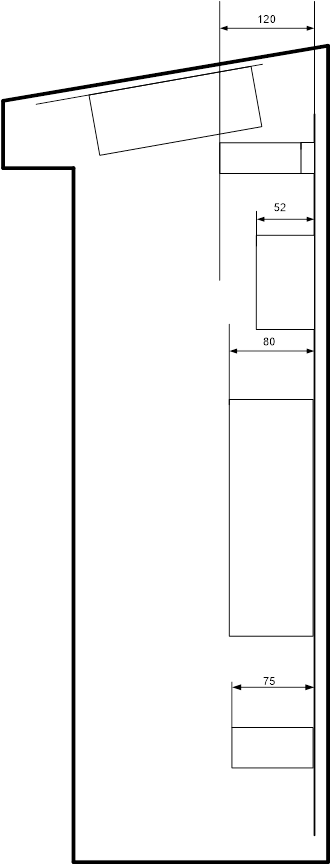
Рис. 10. Схема розміщень елементів вид збоку.
2.9 Розробка схеми з‘єднань
Схеми з‘єднань (зовнішніх з’єднань) показують з’єднання між конструктивними вузлами й окремо встанановлюємими струмоприймачами ти приладами. Є розбіжності в оформленні схем підключень в системах автоматизації технологічних процесів систем управління, які входять в комплект поставки обладнаня.
Зовнішні прилади зображають у вигляді контурів з розміщеними всередині його клемами підєднання (у вигляді кіл) і номерами проводів, що підходять (над клемами). Розміщують прилади в ряд без дотримання їх реального розміщення на технологічному обладнанні чи у виробничому приміщенні. Під зображенням приладів розміщують таблицю з технічними даними та методом встановлення приладів.
Схеми підключення в системах управління технологічним обладнанням виконують наступним чином. Пульти й інші вузли, для яких були виконані схеми з’єднань, зображають прямокутником. Всередині контура позначають всі клемні набори та штепселі, включаючи набір, до якого підєднаний ввід. Вузли (щити, пульти), окремовстановлюємі прилади та струмоприймачі зображають так, як вони були б розміщені на плані обладнання. Всередині контура прилада, використовуючи умовні графічні позначення, зображають його елементи та схеми приєднання. Якщо є прилади зі складною внутрішньою
схемою, то обмежуються зображенням клем чи клемних наборів.
На клемних наборах та біля клем підключення приладів просталяють номера підєднувальних проводів. Від клем показують відводи, кількість ліній повинна співпадати з кількістю проводів що відходять (не більше двох від однієї схеми).
В техноробочих проектах деякі з перерахованих схем можуть бути відсутні. В цьому випадку принципові й елементні схеми повинні містити достатньо інформації для проведення монтажних робіт.
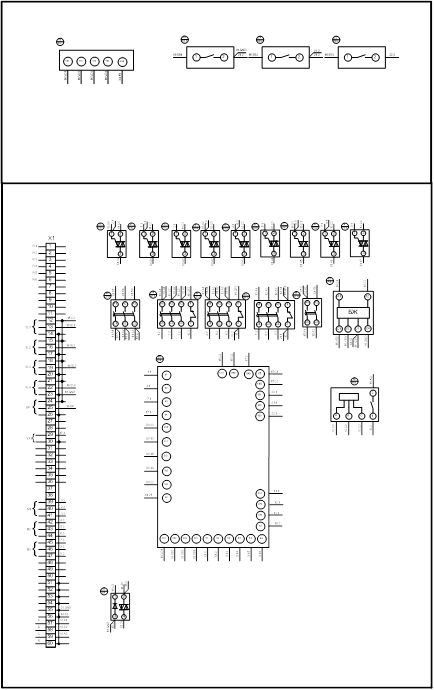
Рис. 11. Схема з‘єднань.
2.10 Розрахунок надійності системи автоматики
На практиці використовують орієнтований розрахунок надійності по середньогруповій інтенсивності відказів елементів. В цьому випадку в якості вихідних данних використовуються значення інтенсивності відказів λі елементів різних груп і чисел Nі елементів які входять в систему. Сутність розрахунку зводиться до знаходження То і вірогідності безвідмовної роботи Р(t).
Рекомендується слідуючий порядок розрахунку:
1 Елементи зпроектованої системи розбивають на групи приблизно з однаковими інтенсивностями відказів і підрахунку кількості елементів Nі в кожній групі.
2 По табличним інтенсивностям відказів встановлюють значення λі кожної групи елементів.
3 Розраховують добуток λіNі які характеризують долю відказів вносимих елементами кожної групи в загальну інтенсивність відказів системи.
4 Визначають загальну інтенсивність відказів системи
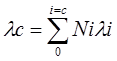 . .
5 Розраховуємо час напрацювання на відказ То
То=1/λс.
6 Визначаємо вірогідність безвідмовної роботи системи
Розрахунок надійності схеми (див. додаток, табл. 12):
Мікросхем – 8шт*0,3 *10-6
=2,4*10-6
Опорів постійного струму – 9шт*3*10-6
=27*10-6
Опорів змінного струму –9шт*13*10-6
=107*10-6
Оптронів – 1шт*1,5*10-6
=1,5*10-6
Двигунів –3шт*30*10-6
=90*10-6
Реле обриву фаз – 1шт*13*10-6
=13*10-6
Автоматів - 5 шт*8*10-6
=32*10-6
Кнопки –3шт*6*10-6
=30*10-6
Світлодіодів – 4шт*0,8*10-6
=7,2*10-6
Ел магніти –1шт*12*10-6
=12*10-6
ΣλіNі=323,6*10-6
То=1/323,6*10-6
=3090 год.
Будуємо номограму
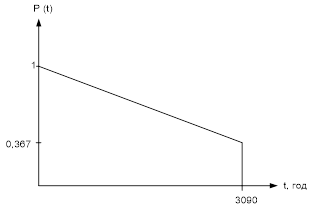
Рис. 13. Номограма роботи обладнання
2.11 Доцільність прийнятих рішень
Використовуючи сучасні новітні технології та розробки де основною характеристикою є мінімізація схем та енергоекономія ресурсів можливо забезпечити в декілька разів більшу стійкість системи в порівнянні з релейними схемами, котрі характеризуються порівняно високою електричною споживчою потужністю та порівняно малим строком служби , що викликане наявністю контактів та частим їх підгорянню. Тому використавши ІМС одночасно було вирішено в габаритних розмірах самої схеми управління, мінімізація елементів, мала споживча потужність схеми. Симісторні пускачі також мають ряд переваг перед магнітними пускачами, насамперед відсутність підгоряння контактів, бо симістор є безконтактним елементом, ще відкривається малою потужністю (близько 1-2Вт).
Прийняті рішення в даному курсовому проекті дають змогу значно продовжити роботу елементів, зменшити споживчу потужність, зменшити собівартість, спростити використання, полегшити управління та забезпечити контроль силового обладнання.
Література
1. Терещук Р.М. та ін. Напівпровідникові сприймаючо – підсилюючі пристрої: Довідник радіолюбителя.- 3-є видання, перероб., і доповн. – Київ : наукова думка, 1987. – 800 с.
2. Збірник типових інструкцій по охороні праці/сост. В.Л. Михайлова, З.П. Гуляєв, - 3-е видання, виправлене – М.: «Недра», 1978. – 735с.
3. Електротехнічний справочник. Т.1. Под общ. Є45 ред. П.Г. Грудниского та ін. Вид 5 – е, виправл. М., «Енергія», 1974.
4 Каталог SV_ALTERA 2003/2005 року (www.svaltera.kiev.ua).
5. Електронна бібліотека ELCOM 2003.
Додатки
Таблиця 1
Номінали потужностей двигунів.
Тип
дви-
гуна
|
Рном
,
кВт
|
При номінальному
Навантаженні
|
Мmax
/Mн
|
Mп
/ Mн
|
Mmin
/ Mн
|
Iп
/Iном
|
J, кг м2 м2
|
| n, об/хв |
η, % |
Cosφ |
| 4АXД56S2 |
0,25 |
2890 |
59,0 |
0,62 |
2,2 |
2,2 |
1,5 |
3,0 |
1910-4
|
| 4АXД56M2 |
0.37 |
2850 |
80 |
0,83 |
2,2 |
2,2 |
1,8 |
7.5 |
19,310-4
|
| 4АХД100S2 |
5,5 |
2880 |
84.5 |
0,85 |
2.4 |
2,0 |
1.6 |
8 |
59.310-4
|
| 4А112M2Y3 |
7.5 |
2900 |
87.5 |
0.88 |
2.8 |
2.0 |
1.8 |
7.5 |
4610-4
|
| 4А132M4Y3 |
11 |
1460 |
87.5 |
0.87 |
3.0 |
2.2 |
1.7 |
7.5 |
410-2
|
| 4A160S4Y3 |
15 |
1465 |
88.5 |
0.88 |
2.3 |
1.4 |
1.0 |
7 |
10.310-2
|
| 4A100L6У3 |
18.5 |
1465 |
89.5 |
0.88 |
2,3 |
1.4 |
1.0 |
7 |
1910-2
|
Таблиця 2
Блоки живлення
| Тип |
Характеристики |
| Вхід |
Вихід |
Напруга
Uж
, В АС
|
Напруга
Uвих
, В DС
|
Струм
Iвих
, А
|
Потужність
Р, Вт
|
| ABL-7RE2402 |
100...240 |
5,10,24,36 |
2 |
48 |
| ABL-7RE2403 |
100...240 |
5,10,24,36 |
3 |
72 |
| ABL-7RE2405 |
100...240 |
5,10,24 |
5 |
120 |
| ABL-7RE2410 |
100...240 |
5,10 |
10 |
240 |
Таблиця 3
Номінали автоматів.
| Параметр |
ВА88-32 |
ВА88-33 |
ВА88-35 |
ВА88-37 |
ВА88-40 |
ВА88-43 |
Максимальний номінальний струм
Iнм
,А
|
3,5-12,5 |
16,0 |
25,0 |
32,0 |
40,0 |
630,0 |
| Струм теплового розчеплення Iн
,А |
12,5; 16; 20; 25; 32; 40 |
50; 63; 80; 100; 125 |
12,5; 16; 20; 25; 32; 40; 50; 63; 80; 100; 125 |
125; 160; 16; 20; 25; 32; 40; 50; 63; 80; 100;200; 250 |
45,0; 55,0 75,0 90,0 |
50,0; 70,0; 100 150 |
80,0; 100,0; 125,0; 160,0 |
| Струм спрацювання електромагнітного розчіплю-вача |
50,0 |
5-10In
|
5-10In
|
5-10In
|
5-10In
|
10In
|
регул. |
| Механічна ізносостійкість, циклів В-О не менше |
8500 |
7000 |
7000 |
4000 |
4000 |
2500 |
| Електрична ізносостійкість, циклів В-О не менше |
1500 |
100 |
1000 |
1000 |
1000 |
500 |
| Режим роботи |
довготривалий |
| Строк служби, не менше, років |
15 |
Таблиця 4
Номінали симісторів.
| Тип елемента |
Iоткр.max
, А, (Iоткр.и.max
, А) |
Iекр..max
, мА |
Iу, пр,
и
мА |
Iу д
, мА |
Iу от max
, мА |
Uоткр..max
, B |
Uекр.max
, B |
Uу от
, B |
dUекр
/dt B/мкс |
dIоткр
/dt) A/мкс |
RT п-с
(RT п-к
) о
С/Вт |
Uпор
, В |
(dUекр
/dt)ком
, В |
| ТС112-10 |
10 |
3 |
4 |
100 |
1,85 |
100…1200 |
3 |
50…100 |
50 |
2,5 |
2,5…10 |
| ТС112-16 |
16 |
3 |
4 |
100 |
1,85 |
100…1200 |
3 |
50…100 |
50 |
1,55 |
2,5…10 |
| ТС122-20 |
20 |
3,5 |
5 |
150 |
1,85 |
100…1200 |
3,5 |
50…500 |
50 |
1,3 |
2,5…25 |
| ТС122-25 |
25 |
3,5 |
5 |
150 |
1,85 |
100…1200 |
3,5 |
50…500 |
50 |
1 |
2,5…25 |
| ТС132-40 |
40 |
5 |
4 |
200 |
1,85 |
100…1200 |
4 |
50…500 |
63 |
0,65 |
2,5…25 |
| ТС132-50 |
50 |
5 |
4 |
200 |
1,85 |
100…1200 |
4 |
50…500 |
63 |
0,52 |
2,5…25 |
| ТС142-63 |
63 |
7 |
4 |
200 |
1,8 |
100…1200 |
4,5 |
50…500 |
63 |
0,44 |
2,5…25 |
| ТС142-80 |
81 |
7 |
4 |
200 |
1,8 |
100…1200 |
4,5 |
50…500 |
63 |
0,34 |
2,5…25 |
| ТС161-100 |
100 |
15 |
12 |
200 |
250 |
1,45 |
200…1200 |
3,5 |
16 |
0,2 |
0,95 |
6,3…50 |
| ТС161-125 |
125 |
15 |
12 |
200 |
250 |
1,45 |
200…1200 |
3,5 |
16 |
0,2 |
0,95 |
6,3…50 |
| ТС161-160 |
160 |
15 |
12 |
200 |
250 |
1,45 |
200…1200 |
3,5 |
16 |
0,2 |
0,95 |
6,3…50 |
| ТС171-200 |
200 |
15 |
12 |
200 |
250 |
1,45 |
200…1200 |
3,5 |
16 |
0,15 |
0,95 |
6,3…50 |
| ТС171-250 |
250 |
15 |
12 |
200 |
250 |
1,45 |
200…1200 |
3,5 |
16 |
0,15 |
0,81 |
6,3…50 |
Таблиця 5
Номінали оптронів.
| Тип елемента |
Iоткр.max
, А, (Iоткр.и.max
, А) |
Iекр..max
, мА |
Iвх.max
, мА |
Iу от
, мА |
Uоткр..max
, B |
Uекр.max
, B |
UВХ
, B |
dUекр
/dt B/мкс |
dIоткр
/dt A/мкс |
RT п-с
(RT п-к
) о
С/Вт |
Uиз
, кВ |
Rиз
, мОм |
tвикл
, мкс (tвкл
, мкс)
|
| МОС3022 |
[1] |
0,1 |
60 |
10 |
3 |
400 |
1,5 |
10 |
227 |
7,5 |
| МОС3023 |
[1] |
0,1 |
60 |
5 |
3 |
400 |
1,5 |
10 |
227 |
7,5 |
| МОС3041 |
[1] |
0,1 |
60 |
15 |
3 |
400 |
1,5 |
1000 |
340 |
7,5 |
| МОС3042 |
[1] |
0,1 |
60 |
10 |
3 |
400 |
1,5 |
1000 |
340 |
7,5 |
| МОС3043 |
[1] |
0,1 |
60 |
5 |
3 |
400 |
1,5 |
1000 |
340 |
7,5 |
| МОС3051 |
[1] |
0,1 |
60 |
15 |
3 |
600 |
1,5 |
10 |
227 |
7,5 |
| МОС3052 |
[1] |
0,1 |
60 |
10 |
3 |
600 |
1,5 |
10 |
227 |
7,5 |
| МОС3061 |
[1] |
0,1 |
60 |
15 |
3 |
600 |
1,5 |
600 |
340 |
7,5 |
| МОС3062 |
[1] |
0,1 |
60 |
10 |
3 |
600 |
1,5 |
600 |
340 |
7,5 |
| МОС3063 |
[1] |
0,1 |
60 |
5 |
3 |
600 |
1,5 |
600 |
340 |
7,5 |
| МОС3081 |
[1] |
0,1 |
60 |
15 |
3 |
800 |
1,5 |
600 |
340 |
7,5 |
| МОС3082 |
[1] |
0,1 |
60 |
10 |
3 |
800 |
1,5 |
600 |
340 |
7,5 |
| МОС3083 |
[1] |
0,1 |
60 |
5 |
3 |
800 |
1,5 |
600 |
340 |
7,5 |
| АОУ103А |
0,1 |
0,1 |
20 |
10 |
2 |
50 |
2 |
5 |
| АОУ103Б |
0,1 |
0,1 |
50 |
10 |
2 |
200 |
2 |
5 |
| АОУ103В |
0,1 |
0,1 |
20 |
10 |
2 |
200 |
2 |
5 |
| ТО125-12,5 |
12,5 |
30 |
80 |
1,4 |
100...1400 |
2,5 |
100 |
1,5 |
1000 |
100 |
| ТО132-25 |
25 |
3 |
150 |
1,75 |
600...1200 |
2,5 |
20...100 |
40 |
0,7 |
2 |
| ТО132-40 |
40 |
3 |
150 |
1,75 |
600...1200 |
2,5 |
20...100 |
40 |
0,47 |
2 |
| ТО142-63 |
63 |
3 |
150 |
1,75 |
600...1200 |
2,5 |
20...100 |
40 |
0,3 |
3 |
| ТО142-80 |
80 |
3 |
150 |
1,75 |
600...1200 |
2,5 |
20...100 |
40 |
0,24 |
3 |
Таблиця 6
Реле напруги

Таблиця 7
Кнопки

Таблиця 8
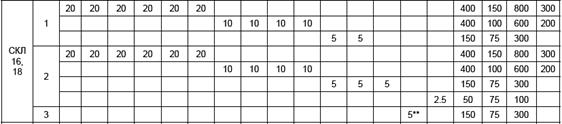
Електромагнітні клапани ПВДФ
| Номер |
n - ходовий |
Тиск,
Бар
|
Січовий переріз, мм |
Середовище |
Корпус |
| 1-1 |
3/2 |
0,5 – 16 |
8 - 40 |
Стиснуте
повітря, вода, масло
|
латунь |
| 1-2 |
2/2 |
0 – 22 |
3 - 12 |
Стиснуте
повітря, вода, масло, гаряче повітря
|
Всередині
нерж. сталь
|
| 1-3 |
2/2 |
0,2 – 16 |
13 - 65 |
Стиснуте
повітря, вода, масло
|
латунь та чавун |
| 1-4 |
2/2 |
0,5 – 6 |
15 - 50 |
- |
ПВХ та ПВДФ |
| 1-5 |
2/2 |
0 – 65 |
1 - 8 |
Стиснуте
повітря, вода, масло
|
латунь; нерж. сталь |
  

1-1 1-2 1-3 1-4 1-5
Таблиця 9
Датчик температури
Таблиця 10
Світлодіоди



Таблиця 11
Датчик рівня


Таблиця 12
Датчик тиску

|
