| Федеральное агентство железнодорожного транспорта
Государственное образовательное учреждение
высшего профессионального образования
Иркутский государственный университет путей сообщения
Кафедра: Электроподвижной состав
Дисциплина: САПР локомотивов
Лабораторная работа № 1
Основные параметры тяговых двигателей
Выполнил
Студент
Группы ЭПС-09-2-1
И-09-ЭПС-554К
Спиридонов М.В.
Проверил
ассистент
Чупраков Е.В
г. Иркутск 2011 г.
Оглавление
1. Принцип действия тягового двигателя
2. Описание назначения тягового двигателя и выражение вращающего момента электродвигателя
3. Конструкция тягового двигателя
4. Электрическая схема двигателя последовательного возбуждения с ее описанием и кривая намагничивания тягового двигателя Ф(Iя)
5. Основные технические данные двигателей ТЛ-2К1 и НБ-418К6 и их сравнительный анализ
5.1. Основные технические данные тягового электродвигателя пульсирующего тока НБ-418К6
5.2. Основные технические данные тягового электродвигателя ТЛ-2К1
5.3. Сравнительный анализ двигателей ТЛ-2К1 и НБ-418К6
6. Список литературы
1. Принцип действия тягового двигателя
Электрические машины, преобразующие электрическую энергию в механическую, называются электродвигателями. Подведем к рассмотренному ранее простейшему генератору питание от постороннего источника электрической энергии (рис. 1).
Рис. 1. Схема простейшего электродвигателя
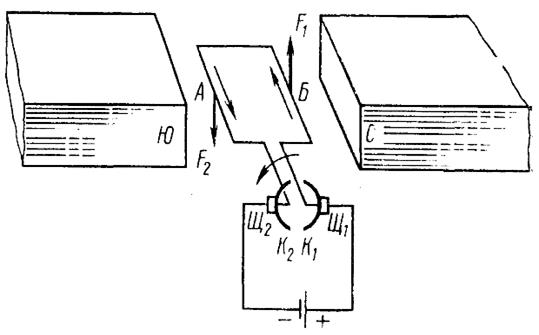
При положении рамки, показанном на этом рисунке, ток проходит по стороне А и по стороне Б. Известно, что на проводник с током, помещенный в магнитное поле, действует сила, направление которой определяется по правилу левой руки: если держать ладонь левой руки так, чтобы в нее входили магнитные силовые линии поля, а вытянутые четыре пальца были обращены по направлению тока в проводнике, то отогнутый большой палец укажет направление действия этой силы. Применив правило левой руки для рассматриваемого случая, определим, что на сторону рамки В действует сила F1 направленная вверх, а на сторону рамки А—сила F2 направленная вниз. Силы F1 и F2, действующие на рамку, называются парой сил. Под действием вращающего момента, создаваемого этой парой сил, рамка поворачивается против часовой стрелки.
Дойдя до вертикального положения, рамка по инерции повернется дальше. Теперь щетка Щ1 касается уже коллекторной пластины К2, а щетка Щ2 — коллекторной пластины К1. Благодаря этому направление тока в рамке изменяется и образуется пара сил, под действием которой рамка продолжает поворачиваться против часовой стрелки. Таким образом, рамка, получая электрическую энергию, будет непрерывно вращаться. Рамка может приводить в движение любой механизм, т. е. в данном случае работает в качестве электродвигателя.
Реклама

Следовательно, машина постоянного тока обладает свойством обратимости и может работать как в качестве генератора, так и в качестве электродвигателя. Поэтому генераторы и электродвигатели имеют в принципе одинаковую конструкцию. Основными частями электрического двигателя постоянного тока являются якорь с обмоткой и коллектором и магнитная система, состоящая из остова двигателя и полюсов с катушками обмоток возбуждения. Подвод электрического тока к коллектору двигателя осуществляется электрографитными щетками, установленными в щеткодержателях. Если требуется изменить направление вращения якоря, то необходимо пересоединить обмотки электродвигателя так, чтобы ток изменил свое направление в обмотке якоря или в обмотке возбуждения. При одновременном изменении направления тока в обмотках якоря и возбуждения направление вращения не изменится. В этом легко убедиться, использовав правило левой руки.
В электродвигателе при его работе возникает ряд явлений, подобных процессам, происходящим в генераторе. Ведь витки обмотки якоря пересекают магнитный поток полюсов электродвигателя, и в соответствии с законом электромагнитной индукции в них возникает электродвижущая сила.
Индуктируемую в якоре двигателя э. д. с. иногда называют противоэлектродвижущей силой потому, что она направлена навстречу подводимому к двигателю напряжению.
Величина э. д. с. Е двигателя прямо пропорциональна магнитному потоку Ф, частоте вращения якоря n и определяется по такой же формуле, что и величина э. д. с. генератора: Е=СФn, где С — постоянный коэффициент, который учитывает число пар полюсов, число витков якоря и другие постоянные для данного электродвигателя величины.
Подводимое к электродвигателю напряжение стремится создать ток в обмотке якоря. Индуктируемая э. д. с. препятствует этому. Ток в обмотке якоря работающего электродвигателя будет определяться не подводимым напряжением, а разностью между напряжением и наведенной в обмотке якоря э. д. с.
Реклама

Разделив эту разность на сопротивление цепи якоря Rя, мы получим ток Iя, проходящий по обмотке якоря
При увеличении механической нагрузки на валу электродвигателя частота вращения его якоря замедляется, индуктируемая э. д. с. уменьшается, увеличивается разность между подводимым напряжением и э. д. с. и, следовательно, ток якоря возрастает.
При уменьшении механической нагрузки картина будет обратной. Таким образом, ток якоря зависит как от подводимого напряжения, так и от механической нагрузки электродвигателя. Вот почему, например, при движении тепловоза на подъеме, когда уменьшаются скорость движения и частота вращения якорей тяговых электродвигателей, ток в двигателях увеличивается, а при увеличении скорости движения — уменьшается.
2. Описание назначения тягового двигателя и выражение вращающего момента электродвигателя
Тяговый электродвигатель пульсирующего тока (в дальнейшем именуемый как тяговый двигатель) предназначен для преобразования электрической энергии, получаемой из контактной сети, в механическую, передаваемую с вала двигателя на колесную пару электровоза. Индивидуальный привод каждой колесной пары электровоза имеет двустороннюю косозубую передачу. Малые шестерни смонтированы на концах вала двигателя, а большие — на оси колесной пары. Передаточное отношение равно 88:21, торцовый модуль -- 11.
Механическая работа электродвигателей характеризуется вращающим моментом и частотой вращения его якоря. Силы, создающие вращающий момент электродвигателя, возникают в результате взаимодействия тока якоря и магнитного потока полюсов. Поэтому вращающий момент электродвигателя будет пропорционален величинам тока Iя якоря и магнитного потока Ф
где К — постоянный для данного электродвигателя коэффициент, зависящий от диаметра якоря, числа проводников обмотки и других конструктивных особенностей двигателя. Вращающий момент электродвигателя не есть величина заданная, постоянная, а зависит от механической нагрузки, или, как говорят, момента сопротивления, который преодолевает вал электродвигателя при вращении. Чем больше момент сопротивления, тем больше вращающий момент электродвигателя, так как только в этом случае электродвигатель сможет работать, преодолевая сопротивление. Из формулы для определения э.д.с. двигателя можно получить зависимость для вычисления частоты вращения якоря, подставив в нее значение э. д. с. Е = U — InRя
Следовательно, частота вращения якоря электродвигателя пропорциональна подводимому напряжению и обратно пропорциональна магнитному потоку, а также уменьшается с увеличением внутренних потерь напряжения IzRя в цепи якоря.
Чем больше напряжение, подводимое к двигателю, тем больше ток в обмотке якоря и вращающий момент. Якорь, преодолевая момент сопротивления внешней нагрузки, начинает вращаться быстрее. С увеличением же магнитного потока при прочих равных условиях увеличивается э.д.с., индуктируемая в обмотке якоря. При этом уменьшается ток в якоре, а значит, снижается вращающий момент и частота его вращения.
тяговый двигатель конструкция
3. Конструкция тягового двигателя
Рисунки продольного и поперечного разрезов тягового электродвигателя постоянного тока (рисунок 1.1. и рисунок 1.2. с обозначением на них основных узлов: остова, якоря, главного и добавочно полюсов, коллектора, щеткодержателя и др. элементов.)
Конструкция тягового электродвигателя спроектирована для работы на пульсирующем токе от выпрямительной установки с включением последовательно в цепь каждого тягового двигателя индуктивного сглаживающего реактора. Двигатель представляет собой шестиполюсную электрическую машину с последовательным возбуждением и независимой системой охлаждения. Охлаждающий воздух подается в тяговый двигатель через патрубок со стороны коллектора и выбрасывается через патрубок, расположенный со стороны, противоположной коллектору. Тяговый двигатель состоит из остова, траверсы, якоря, подшипниковых щитов, моторно-осевых подшипников. На тяговом двигателе укреплены кожуха зубчатой передачи. (Рисунок 1.1)
Рисунок 1.1 Продольный разрез тягового двигателя
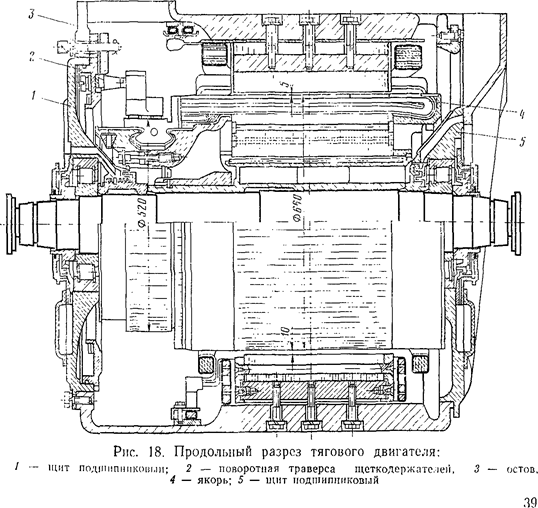
1- щит подшипниковый;
2–поворотная траверса щеткодержателей;
3–остов;
4 – якорь;
5 – щит подшипниковый.
Остов тягового двигателя стальной, цилиндрической формы, является одновременно магнитопроводом. На нем укреплены шесть главных и шесть добавочных полюсов, поворотная траверса с шестью щеткодержателями, поворотный механизм траверсы, три обоймы с двумя накладками и фиксатором и щиты с роликовыми подшипниками, в которых вращается якорь тягового двигателя. В пазах наконечников главных полюсов размещена компенсационная обмотка. С наружной стороны остов имеет два прилива для крепления букс моторно-осевых подшипников, прилив для подвески двигателя, предохранительные приливы, прилив для коробки выводов. На остове расположены рымы для транспортировки двигателя и кантования остова при монтаже и демонтаже. С коллекторной стороны имеются два люка, предназначенных для осмотра щеточного аппарата и коллектора, и один вентиляционный люк для входа воздуха. Схема электрических соединений полюсных катушек в остове приведена на рисунке 1.2.
Рисунок 1.2 Поперечный разрез тягового двигателя
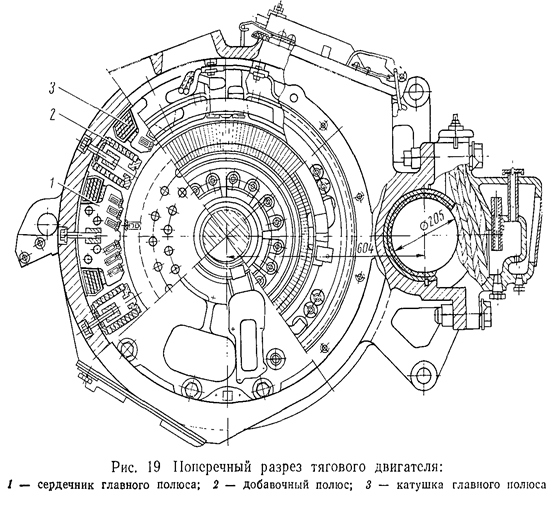
1- сердечник главного полюса
2- добавочный полюс
3- катушка главного полюса
На остове тягового двигателя смонтирована коробка выводов. Электрический монтаж коробки выводов выполнен двойными проводами марки ІІПСТ сечением 95 мм2 с одним наконечником на два провода. Кабели укреплены на пальцах (опорных изоляторах), опрессованных прессмассой АГ-4. Пальцы монтируют специальным ключом. Условное обозначение выводных кабелей выбито на металлической планке стеклопластовой крышки. После монтажа силовых кабелей коробку выводов закрывают стеклопластовой крышкой и уплотняющими резиновыми клипами. Со стороны ввода кабелей из остова в коробку выводов и со стороны вывода кабелей из нее коробка выводов уплотнена от попадания пыли и влаги.
Главный полюс состоит из сердечника, катушки, предохранительного фланца, расположенного между сердечником и катушкой, пружинной рамки, прижимающей катушку к остову, и стальной прокладки толщиной 0,5 мм, расположенной между полюсом и остовом. Главный полюс прикреплен к остову тремя болтами МЗО. Сердечник главного полюса набран из листовой электротехнической стали толщиной 0,5 мм и скреплен заклепками.
Катушка главного полюса имеет 11 витков, намотана на ребро из мягкой шинной меди размером 4X65 мм, изогнута по радиусу для обеспечения прилегания к внутренней поверхности остова. Корпусная изоляция катушки состоит из пяти слоев стеклоленты толщиной 0,13 мм и одного слоя стеклоленты толщиной 0,2 мм, наложенных с перекрытием в половину ширины ленты. Межвитковая изоляция - асбестобумага толщиной 0,3 мм в два слоя. Корпусная изоляция катушки может быть выполнена типа Монолит-2, которая состоит из пяти слоев стеклослюдинитовой ленты толщиной 0,13 мм, наложенных с перекрытием в половину ширины ленты и пропитанных эпоксидным компаундом. Полюсы с катушками на изоляции типа Монолит-2 выполнены моноблочной и немоноблочной конструкции. На один двигатель устанавливаются полюсы одного исполнения.
Добавочный полюс состоит из сердечника и катушки. Катушка к полюсу приклеена (залита) эпоксидным компаундом. Узел этот представляет собой неразборный монолитный блок. Добавочный полюс прикреплен к остову тремя болтами М20. Сердечник добавочного полюса нашихтован из листов электротехнической стали толщиной 0,5 мм, скрепленных стержнем и заклепкой. На сердечник добавочного полюса установлена текстолитовая прокладка толщиной 6,7 мм и прокладка из дюралюминиевого листа толщиной 2,5 мм, которая одновременно крепит катушку на сердечнике.
Катушка добавочного полюса имеет восемь витков, намотана из медной проволоки размером 12,5X12,5 мм. Корпусная изоляция катушки состоит из пяти слоев стеклослюдинитовой ленты толщиной 0,13 мм, наложенных с перекрытием в половину ширины ленты, и пропитана эпоксидным компаундом совместно с сердечником полюса. Межвитковая изоляция — асбестобумага толщиной 0,3 мм в два слоя.
Компенсационная обмотка состоит из шести катушек по шесть витков каждая и расположена она в пазах главных полюсов. Намотаны компенсационные катушки из прямоугольной проволоки ПММ сечением 4,4X35 мм таким образом, что в каждом пазу главного полюса располагаются по два стержня. Корпусная изоляция состоит из четырех слоев микаленты толщиной 0,1 мм и одного слоя стеклоленты толщиной 0,1 мм, уложенных с перекрытием в половину ширины ленты. Витковая изоляция состоит из одного слоя микаленты 0,1 мм, уложенной с перекрытием в половину ширины ленты. Крепление обмотки в пазах осуществляется клиньями из текстолита марки Б.
Щеточный аппарат тягового двигателя состоит из траверсы с поворотным механизмом и разжимным устройством, шести кронштейнов, шести щеткодержателей. Траверса стальная, швеллерного сечения, разрезная, имеет но наружному ободу зубчатый венец, входящий в зацепление с шестерней поворотного механизма. В остове траверса фиксирована фиксатором, установленным против верхнего коллекторного люка, и прижата к подшипниковому щиту двумя накладками и тем же фиксатором.
Поворотный механизм траверсы состоит из валика, закрепленного на остове, и шестерни, закрепленной на валике. Валик имеет квадратную головку. Шестерня входит в зацепление с траверсой. При вращении валика специальным ключом-трещоткой шестерня поворачивает траверсу.
Разжимное устройство состоит из двух шарниров, закрепленных гайками с шайбами на траверсе, шпильки и пружинного стопора. Один шарнир имеет отверстие с правой резьбой, другой с левой резьбой. В шарниры вкручена шпилька, имеющая шестигранник для вращения ее ключом, и зубчатое колесо для стопорения стопором. При вращении шпильки происходит разжатие или сжатие траверсы. С помощью разжимного устройства, установленного в месте разреза, траверса крепится в проточке подшипникового щита.
4. Электрическая схема двигателя последовательного возбуждения с ее описанием и кривая намагничивания тягового двигателя Ф(Iя)
Характерной особенностью двигателя последовательного возбуждения (ДПТ с ПВ) является то, что его обмотка возбуждения (ПОВ) с сопротивлением посредством щеточно-коллекторного узла последовательно соединена с обмоткой якоря с сопротивлением , т.е. в таких двигателях возможно только электромагнитное возбуждение.
Принципиальная электрическая схема включения двигателя последовательного возбуждения представлена на рисунке 2
Рисунок 2 Электрическая схема двигателя последовательного возбуждения
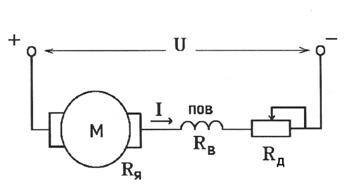
Для осуществления пуска ДПТ с ПВ последовательно с его обмотками включается добавочный реостат
Уравнения электромеханической характеристики ДПТ с ПВ
Ввиду того, что в ДПТ с ПВ ток обмотки возбуждения равен току в обмотке якоря, в таких двигателях в отличие от ДПТ с НВ проявляются интересные особенности.
Поток возбуждения  ДПТ с ПВ связан с током якоря (он же является и током возбуждения) ДПТ с ПВ связан с током якоря (он же является и током возбуждения)  зависимостью, называемой кривой намагничивания, представленной на рисунок 3. зависимостью, называемой кривой намагничивания, представленной на рисунок 3.
Рисунок 3 Кривая намагничивания ДПТ с ПВ
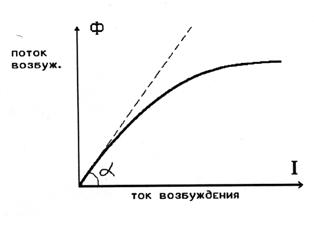
Как видно зависимость  для малых токов близка к линейной, а с увеличением тока проявляется нелинейность, связанная с насыщением магнитной системы ДПТ с ПВ. Уравнение электромеханической характеристики ДПТ с ПВ так же и для ДПТ с независимым возбуждением имеет вид для малых токов близка к линейной, а с увеличением тока проявляется нелинейность, связанная с насыщением магнитной системы ДПТ с ПВ. Уравнение электромеханической характеристики ДПТ с ПВ так же и для ДПТ с независимым возбуждением имеет вид
Из-за отсутствия точного математического описания кривой намагничивания, при упрощенном анализе можно пренебречь насыщением магнитной системы ДПТ с ПВ, т. е. принять зависимость между потоком и током якоря линейной, как это показано на рис. 3 пунктирной линией. В этом случае можно записать

где  коэффициент пропорциональности. коэффициент пропорциональности.
5. Основные технические данные двигателей ТЛ-2К1 и НБ-418К6 и их сравнительный анализ
5.1 Основные технические данные тягового электродвигателя пульсирующего тока НБ-418К6
Мощность................... 790/740 кВт
Напряжение на коллекторе........... 950/950 В
Ток якоря.................. 880/820 А
Частота вращения............... 890/915 об/мин
Количество вентилирующего воздуха, не менее 105/105 мУ. мин
Сила тяги при передаче 88:21 ....... ... 5640/5120 кгс
Скорость электровоза............ . ' 50/51,5 км/ч
К.П Д.................... 94,5/94,8%
Система вентиляции........... .... Независимая
Класс изоляции:
катушек главного полюса......... . . Г
катушек добавочного полюса....... .. /•'
якоря.................. .. В
компенсационной обмотки. .......... В
Сопротивление обмотки всех катушек главных полюсов при 20°С (без шунта) ... ....... 0,0079 Ом
Сопротивление обмотки всех катушек добавочных полюсов и компенсационной обмотки при 20°С . 0,0119 С
Сопротивление обмотки якоря при 20°С ... 0,011
Постоянная шунтировка главных полюсов . 0,96
Масса двигателя без зубчатой передачи...... 4350 кг
Масса остова в сборе............ .. 2120 кг
Масса якоря.................. 1350 кг
Масса буксы моторно-осевого подшипника в сборе (без вкладышей)................ 76 кг
5.2. Основные технические данные тягового электродвигателя ТЛ-2К1
Напряжение на зажимах двигателя ... 1500 В
Ток часового режима........ 480 А
Мощность часового режима...... 670 кВт
Частота вращения часового режима 790 об/мин
Ток продолжительного режима ..... 410 А
Мощность продолжительного режима 575 кВт
Частота вращения продолжительного режима 830 об/мин
Возбуждение последовательное
Класс изоляции по нагревостойкости обмотки якоря...... В
Класс изоляции по нагревостойкости полюсной системы..р
Наибольшая частота вращения при среднеизношенных бандажах 1690 об/мин
Подвешивание двигателя опорно-осевое
Передаточное число ........ 88/23—3,826
Сопротивление обмоток главных полюсов при температуре 20 °С 0,025 Ом
Сопротивление обмоток дополнительных ПОЛЮСОВ и компенсационной обмотки при температуре 20 °С 0,0356
Сопротивление обмотки якоря при температуре 20 'С...0,0317 Ом
Система вентиляции........ независимая
Количество вентилирующего воздуха, не менее 95 м3/мин
К. п. д. в часовом режиме....... 0,931
К. п. д. в продолжительном режиме .... 0І930
Масса без шестерен ....... 5000 кг
5.3 Сравнительный анализ двигателей ТЛ-2К1 и НБ-418К6
Наибольшее распространение в промышленности получили электрические двигатели двух видов: переменного тока НБ-418К6 и постоянного тока ТЛ-2К1 с различными способами возбуждения.
Двигатели, которые могут быть использованы в качестве тяговых на электровозе, должны удовлетворять как минимум двум требованиям. Прежде всего, они должны допускать возможность регулирования в широких пределах частоты вращения. Это позволяет изменять скорость движения поезда. Кроме того, необходимо иметь возможность регулировать в широком диапазоне силу тяги, т. е. вращающий момент, развиваемый двигателем. Так, двигатели электровоза должны обеспечивать значительную силу тяги во время трогания поезда, его разгона, при преодолении крутых подъемов и т. п. и снижать ее при более легких условиях движения.
С точки зрения организации движения, казалось бы, желательно, чтобы поезда независимо от изменения сопротивления движению перемещались с постоянной скоростью или эта скорость снижалась бы незначительно. В этом случае зависимость между силой тяги Р и скоростью движения и (рис. 4, а) представляла бы в прямоугольных осях координат вертикальную прямую линию 1, параллельную оси Р, или слегка наклонную линию 2. Зависимость между силой тяги, развиваемой двигателями локомотива, и скоростью его движения называют тяговой характеристикой и представляют ее графически, как показано на рис. 4, или в виде таблиц.
Рисунок 4. жесткая (а) и мягкая (б) тяговые характеристики
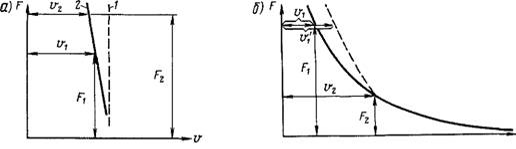
Изображенные на рис. 4, а тяговые характеристики являются жесткими. В случае жесткой характеристики мощность, потребляемая двигателями и равная произведению силы тяги на скорость, например, на крутых подъемах, возрастает пропорционально увеличению силы тяги. Резкое увеличение потребляемой мощности приводит к необходимости повышения мощности как самих двигателей, так и тяговых подстанций, увеличения площади сечения контактной подвески, что связано с затратами денежных средств и дефицитных материалов. Избежать этого можно, обеспечив характеристику двигателя, при которой с увеличением сопротивления движению поезда автоматически снижалась бы его скорость, т. е. так называемую мягкую характеристику (рис. 4, б). Она имеет вид кривой, называемой гиперболой. Двигатель с такой тяговой характеристикой работал бы при неизменной мощности. Однако при движении тяжелых составов на крутых подъемах, когда необходима большая сила тяги, поезда перемещались бы с очень низкой скоростью, тем самым резко ограничивая пропускную способность участка железной дороги. Примерно такой характеристикой обладают тепловозы, так как мощность их тяговых двигателей ограничена мощностью дизеля. Это относится и к паровой тяге, при которой мощность ограничивается производительностью котла.
Мощность, развиваемая тяговыми двигателями электровоза, практически не ограничена мощностью источника энергии. Ведь электровоз получает энергию через контактную сеть и тяговые подстанции от энергосистем, обычно обладающих мощностями, несоизмеримо большими мощности электровозов. Поэтому при создании электровозов стремятся получить характеристику, показанную на рис. 4, б штриховой линией. Электровоз, оборудованный двигателями с такой характеристикой, может развивать значительную силу тяги на крутых подъемах при сравнительно высокой скорости. Конечно, мощность, потребляемая тяговыми двигателями в условиях больших сил тяги, повышается, но это не приводит к резким перегрузкам питающей системы.
Двигатели ТЛ-2К1 самые распространенные. Достоинства их трудно переоценить: простота устройства и обслуживания, высокая надежность, низкая стоимость, несложный пуск. Однако, как известно, частота вращения асинхронного двигателя почти постоянна и мало зависит от нагрузки, она определяется частотой подводимого тока и числом пар полюсов двигателя. Поэтому регулировать частоту вращения таких двигателей, а, следовательно, и скорость движения поездов можно только изменением частоты питающего тока и числа пар полюсов, что трудно осуществить. Кроме того, как уже отмечалось выше, для питания таких двигателей требуется устраивать сложную контактную сеть.
Благодаря развитию полупроводниковой техники оказалось возможным создать преобразователи однофазного переменного тока в переменный трехфазный и регулировать их частоту.
В какой же степени отвечают требованиям, предъявляемым к тяговым двигателям, электрические машины постоянного тока? Напомним, что эти машины — генераторы и двигатели — различаются по способу возбуждения.
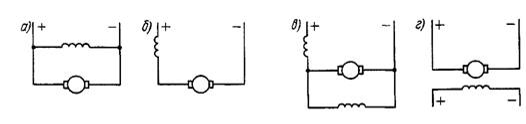
Обмотка возбуждения может быть включена параллельно обмотке якоря (рис. 5, а) и последовательно с ней (рис5, б). Такие двигатели называют соответственно двигателями параллельного и последовательного возбуждения. Используют также двигатели, у которых имеются две обмотки возбуждения — параллельная и последовательная. Их называют двигателями смешанного возбуждения (рис. 5, в). Если обмотки возбуждения включены согласно, т. е. создаваемые ими магнитные потоки складываются, то такие двигатели называют двигателями согласного возбуждения; если потоки вычитаются, то имеем двигатели встречного возбуждения. Применяют и независимое возбуждение: обмотка возбуждения питается от автономного (независимого) источника энергии (рис. 5, г).
Рисунок 5. Схемы, проясняющие способы возбуждения двигателей постоянного тока
Чтобы оценить возможности регулирования частоты вращения двигателя постоянного тока, напомним, что при вращении в магнитном поле проводников обмотки якоря двигателя в них возникает (индуцируется) электродвижущая сила (э. д. с). Направление ее определяют, пользуясь известным правилом правой руки. При этом ток, проходящий по проводникам якоря от источника энергии, направлен встречно индуцируемой э. д. с. Напряжение, подведенное к двигателю, уравновешивается э. д. с, наводимой в обмотке якоря, и падением напряжения в обмотках двигателя.
Значение э. д. с. пропорционально магнитному потоку и частоте вращения, с которой проводники пересекают магнитные силовые линии. Поэтому без ощутимой ошибки можно считать, порциональность) или магнитный поток возбуждения (обратная пропорциональность).
Как зависит вращающий момент от тока якоря? Если подключить проводники обмотки якоря двигателя к электрической сети, то проходящий по ним ток, взаимодействуя с магнитным полем полюсов, создаст силы, действующие на каждый проводник с током. В результате совместного действия этих сил создается вращающий момент М, пропорциональный току якоря и магнитному потоку полюсов.
Чтобы построить тяговую характеристику двигателя постоянного тока, необходимо установить, как изменяются частота вращения п и момент М в зависимости от тока при разных способах возбуждения двигателей.
Для двигателей с параллельным возбуждением можно считать, что ток возбуждения не изменяется с изменением нагрузки.
Примерно такие же характеристики будут иметь двигатели с независимым возбуждением, если не изменяется ток возбуждения.
Рассмотрим те же характеристики для двигателя с последовательным возбуждением (см. рис. 5, б). У такого двигателя магнитный поток зависит от нагрузки, так как по обмотке возбуждения проходит ток якоря. Частота вращения якоря обратно пропорциональна потоку и при увеличении тока якоря, а значит и магнитного потока, резко уменьшается (рис. 6, б). Вращающий момент двигателя, наоборот, резко возрастает, так как одновременно увеличиваются ток якоря и зависящий от него магнитный поток возбуждения.
В действительности магнитный поток немного уменьшается вследствие размагничивающего действия реакции якоря. В случае небольших нагрузок магнитный поток возрастает пропорционально току, а вращающий момент, пропорционально квадрату тока якоря.
Рисунок 6. Электромеханические характеристики двигателей с параллельным (а) и последовательным (б) возбуждением
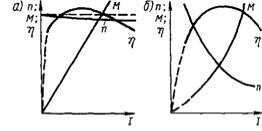
Если нагрузка увеличивается значительно, ток двигателя возрастет до такой степени, что наступит насыщение его магнитной системы. Это приведет к тому, что частота вращения будет снижаться уже в меньшей степени. Но тогда начнет более интенсивно возрастать ток, а значит, и потребляемая из сети мощность. При этом скорость движения поезда несколько стабилизируется. Зависимости частоты вращения якоря, вращающего момента и коэффициента полезного действия) от потребляемого двигателем тока называют электромеханическими характеристиками на валу тягового двигателя при неизменном напряжении, подводимом к тяговому двигателю, и постоянной температуре обмоток 115°С (по ГОСТ 2582—81).
По электромеханическим характеристикам двигателя можно построить его тяговую характеристику. Для этого берут ряд значений тока и определяют по характеристикам соответствующие им частоту вращения и вращающий момент. По частоте вращения двигателя несложно подсчитать скорость движения поезда, так как известны передаточное число редуктора и диаметр круга катания колесной пары.
Поскольку в теории тяги пользуются размерностью частоты вращения якоря тягового электродвигателя, выраженной в об/мин, а скорость движения поезда измеряют в км/ч.
Зная вращающий момент на валу двигателя, а также потери при передаче момента от вала тягового двигателя к колесной паре, которые характеризуют к. п. д. передачи, можно получить и силу тяги, развиваемую одной, а затем и всеми колесными парами электровоза.
По полученным данным строят тяговую характеристику (см. рис. 4). На электрических железных дорогах в качестве тяговых в подавляющем большинстве случаев используют двигатели постоянного тока с последовательным возбуждением НБ418К6, обладающие мягкой тяговой характеристикой. Такие двигатели, как отмечалось выше, при больших нагрузках вследствие снижения скорости потребляют меньшую мощность из системы электроснабжения.
Тяговые двигатели последовательного возбуждения НБ418К6 имеют и другие преимущества по сравнению с двигателями параллельного возбуждения ТЛ-2К1. В частности, при постройке тяговых двигателей устанавливают допуски на точность изготовления, на химический состав материалов для двигателей и т. п. Создать двигатели с абсолютно одинаковыми характеристиками практически невозможно. Вследствие различия характеристик тяговые двигатели, установленные на одном электровозе, при работе воспринимают неравные нагрузки. Более равномерно нагрузки распределяются между двигателями последовательного возбуждения, так как они имеют мягкую тяговую характеристику.
Однако, двигатели последовательного возбуждения НБ418К6 имеют и весьма существенный недостаток — электровозы с такими двигателями склонны к боксованию, иногда переходящему в разносное. Этот недостаток особенно резко проявился после того, когда масса поезда стала ограничиваться расчетным коэффициентом сцепления. Жесткая характеристика в значительно большей мере способствует прекращению боксования, так как в этом случае сила тяги резко снижается даже при небольшом скольжении и имеется больше шансов на восстановление сцепления. К недостаткам тяговых двигателей последовательного возбуждения НБ418К6 относится и то, что они не могут автоматически переходить в режим электрического торможения: для этого необходимо предварительно изменить способ возбуждения тягового двигателя.
6. Список литературы
1. Папченков СИ. Электрические аппараты и схемы тягового подвижного состава железных дорог. М: УМК МПС России, 2000.
2. Калинин В.К. Электровозы и электропоезда. М.: Транспорт, 1991.
3. Электровозы ВЛ10 и ВЛ10у. Руководство по эксплуатации. М.: Транспорт, 1981.
4. Электровоз ВЛ11. Руководство по эксплуатации. М.: Транспорт, 1983.
5. Электровоз ВЛ80с. Руководство по эксплуатации. М.: Транспорт, 1982
6. Электровоз ВЛ80р. Руководство по эксплуатации. М.: Транспорт, 1985.
7. Электровоз ВЛ85. Руководство по эксплуатации. М.: Транспорт, 1992.
8. Просвирин Б.К. Электропоезда постоянного тока. М.: УМК МПС России, 2001.
9. Цукало П.В., Просвирин Б.К. Эксплуатация электропоезда. Справочник. М.: Транспорт, 1994.
10. Бочаров В.И., Лозановский А.Л., Тушканов Б.А., Янов В.П. и др. Магистральные электровозы (электрические аппараты, полупроводниковые преобразователи системы управления). М.: Энергоатомиздат, 1994.
|
