Содержание
1. Передвижная лаборатория дорожных испытаний АТС на базе ГАЗ-2705
1.1 Компоновка передвижной лаборатории
1.2 Электрические схемы основной измерительной аппаратуры
2. Результаты ездовых испытаний передвижной лабораториина полигоне ГУП «НИЦИАМТ»
3. Оценка параметров устойчивости и управляемости АТС в стендовых условиях
Выводы и рекомендации
Библиографический список
1. Передвижная лаборатория дорожных испытаний АТС на базе ГАЗ-2705
1.1 Компоновка передвижной лаборатории
В салоне автомобиля (рис. 1) расположено 9 рабочих мест, оснащенных контрольно-регистрирующей аппаратурой, пультами управления и настройкой измерительных устройств.
Измерительная аппаратура позволяет дискретно регистрировать тормозной путь, а непрерывно - параметры в соответствии с таблицей 1.
Комплекс датчиков и регистрирующая аппаратура представлена на рисунке 2.
Совокупность измеряемых параметров, а также возможность наращивания измерительного оборудования, позволяет использовать передвижную лабораторию в учебном процессе и научных исследованиях.

Рис. 1. Передвижная лаборатория дорожных испытаний
Таблица 1 Основные показатели и характеристики, определяемые в ходе испытаний передвижной лаборатории
Тягово-скоростные
свойства
|
Тормозные свойства |
Топливная
экономичность
|
Управляемость
и устойчивость
|
Маневренность |
время разгона
путь разгона
скорость автомобиля
ускорение автомобиля
|
время торможения
путь торможения
скорость автомобиля
замедление
давление в т/приводе
нагрузка на оси
|
часовой расход топлива
путевой расход топлива
скорость автомобиля
|
скорость автомобиля
угловая скорость поворота
время операции
курсовой угол
угол крена
угол поворота РК
угол поворота УК
|
скорость автомобиля
угловая скорость поворота
угол поворота РК
угол поворота УК
|
 |
Время разгона до
заданной скорости
|
Тормозной путь |
Часовой расход топлива |
Угловая скорость поворота рулевого колеса |
Минимальный радиус поворота |
Время разгона на
заданной дистанции
|
Установившееся
замедление
|
Контрольный расход топлива |
Характеристика статической траекторной управляемости |
Ширина полосы движения по следу колес |
Ускорения при разгоне (максимальные и
средние)
|
Время
срабатывания
тормозных
систем
|
РТМЦ |
Чувствительность к управляющему воздействию |
Габаритная ширина поворота |
| Скоростная характеристика разгон – выбег |
РТГЦд |
Угол
крена
|
Внешний габаритный радиус поворота |
| Длина динамически преодолеваемого подъема |
Топливная
характеристика
установившего
движения
|
Удельная тяговая сила необходимая для совершения поворота |
| Установившаяся скорость на затяжных подъемах |
Коэффициент использования сцепной силы колес при повороте |
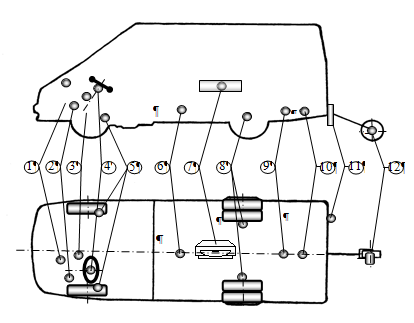
Рис. 2. Схема размещения измерительного оборудования в передвижной лаборатории на базе автомобиля ГАЗ-2705
Датчик положения дроссельной заслонки.
2. Датчик давления в тормозном приводе.
3. Расходомер топлива.
4. Датчик положения рулевого колеса и датчик момента на рулевом колесе.
Реклама

5. Потенциометры углов поворота управляемых колес.
6. Датчик продольного и поперечного ускорения.
7. Самописец.
8. Датчики нормальной нагрузки на ось.
9. Гироскоп углов крена и продольного наклона кузова.
10. Гироскоп угловой скорости автомобиля.
11. Пиротехническое устройство.
12. Устройство «пятое колесо» (тахогенератор и геркон)
1.2 Электрические схемы основной измерительной аппаратуры
передвижная лаборатория дорожный испытание
Измерение и регистрация времени
Исследуемые параметры автомобиля являются функциями времени. Поэтому их запись производится в реальном времени с отметкой его на ленте регистратора. Кроме того, время измеряется с помощью электрических, суммирующих приборов.
Для измерения и регистрации времени при динамических и топливно-экономических испытаниях автомобиля ГАЗ 2705 использованы электроконтактные часы МЧ-62 (датчик меток времени), импульсные счетчики (суммирующие приборы), отметчики времени (самописец).
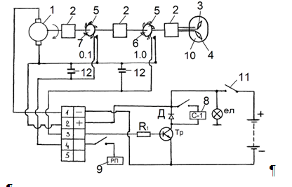
Рис. 3. Электроконтактные часы МЧ-62
1. Электродвигатель7.Контакты прерывателя
2. Шестеренчатые редукторы8.Импульсный счетчик
3. Малая стрелка9.Электромагнитный отметчик
4. Большая стрелка10. Шкала часов
5. Кулачки11. Выключатель
6. Контакты прерывателя12. Конденсаторы
Схема, которая показана на рисунке 3, позволяет наносить отметки времени на ленту самописца через 0,1с и измерять время с помощью импульсного счетчика с точностью 1с.
Принцип действия:
Электродвигатель 1 часов, число оборотов которого стабилизировано центробежным регулятором, через шестеренчатые редукторы 2 вращает малую 3 и большую 4 стрелки часов и кулачки 5, которые своими выступами замыкают контакты прерывателей 6 и 7. Скорости вращения стрелок и кулачков подобраны так, что большая стрелка 4 делает один оборот за 5с, а малая 3 - за 50с. Прерыватели 6 и 7 замыкают свои контактысоответственно через 1,0 и 0,1с., то есть с частотой 1 и 10 Гц.
При замыкании контактов выключателя 11 электродвигатель 1 включается в цепь питания, в результате чего якорь электродвигателя и кулачки 5 начинают вращаться, замыкая с указанными частотами контакты прерывателей 6 и 7, которые подают напряжение питания на базу транзистора Тр через сопротивление R1
. В результате транзистор открывается и на обмотку электромагнитного счетчика подается напряжение тем самым, включая с помощью электронного реле импульсный счетчик.
Конденсаторы 12 при этом уменьшают обгорание контактов прерывателей 6 и 7. Импульсные счетчики времени включают выключатели, расположенные на самих счетчиках.
Реклама

Для четкого срабатывания импульсного счетчика применяется усилитель постоянного тока на базе транзистора КТ – 829 с большим коэффициентом усиления, что позволяет облегчить режим работы контактной группы часов МЧ-62. Сопротивление R1
используется для установки режима работы транзистора, а диод Д применяется для шунтирования обратных выбросов напряжения на электрических обмотках электромагнита счетчика, которые могут привести к выходу из строя транзистора.
Отметка времени на ленте регистрирующего прибора выглядит в виде прямоугольных импульсов, наносимых через 0,1с.
Измерение тормозного пути
Для измерения тормозного пути автомобиля применяется специальный отметчик начала торможения (рис. 4).
Для поджига порохового заряда мелового отметчика начала торможения используется стандартный блок воспламенения горючей смеси предпускового подогревателя.
Напряжение с автомобильной батареи подается через предохранитель 2, выключатель сигнала торможения 3, включатель 5 на первичную обмотку катушки высокого напряжения 7 и транзистор Тр блокинг- генератора. Блок преобразовывает напряжение 12 В АКБ в переменное высоковольтное напряжение, которое подается на свечу зажигания 8 пистолета 9. Стабилитроны СТ1, СТ2 и конденсатор С1 служит для защиты транзистора Тр от перенапряжений возникающих при работе генератора.
Принцип действия
При движении автомобиля с постоянной, определенной скоростью перед самым началом торможения включается тумблер 5
. При нажатии на педаль тормоза срабатывает выключатель торможения 3
и происходит выстрел, а на дороге остается меловое пятно. Расстояние от мелового пятна до пистолета на остановившемся автомобиле является тормозным путем.
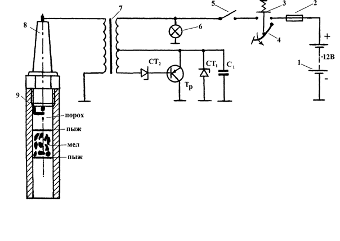
Рис. 4. Принципиальная схема отметчика начала торможений 1 –АКБ4; 2 – предохранитель; 3 - выключатель сигнала торможения; 4 - педаль тормозная; 5 – выключатель; 6 - сигнальная лампочка; 7 - катушка зажигания; 8 – свеча; 9 - пистолет-отметчик
Измерение продольных и поперечных ускорений
Измерения производятся акселерометром типа МП-95 (рис. 5).
Конструктивно акселерометр представляет собой инерционную массу подвешенную на пружинах в горизонтальной плоскости. Непосредственно на подвижном элементе смонтирован потенциометр. При возникновении перегрузок инерционная масса смещается, преодолевая сопротивление пружин. Амплитуда перемещения инерционной массы пропорциональна величине действующего ускорения, которое регистрируется по величине электрического сигнала, снимаемого с потенциометра.
Для измерения величины электрического сигнала используется измерительная мостовая схема (рис. 6). Переменные резисторы Rд
и RБ
являются соответственно датчиком и балансировочным сопротивлением. Резисторы R1
,R2
,R3
,R4
дополнительные сопротивления, исключающие выход из строя прибора или обгорание контактов потенциометров. Выходной сигнал снимается с движков датчика и балансировочного резистора и подается на амплитудный регулятор RА

Рис. 5. Акселерометр МП-95 и гироскоп ГР
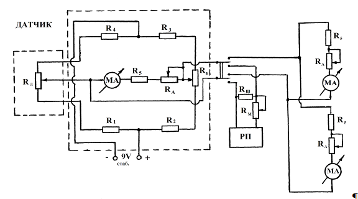
Рис. 6 Измерительная схема акселерометра: RД
– 1,4 кОмR1
– 750ОмРП - регистрируемый прибор, RБ
– 470 кОмR2
– 1,1 кОмМА – измерительный прибор, RА
– 22 кОмR3
– 1,1 кОмRш
– шунтирующее сопротивление, R4
– 750 ОмRм
– масштабное сопротивление, R5
- 9,1 кОм
В статическом положении, когда движок датчика находится на средине, измерительный мост должен находится в равновесном состоянии, а стрелка измерительного прибора на «нуле». В противном случае произвести корректировку переменным балансировочным сопротивлением RБ
.
Смещение движка датчика создаст дисбаланс схемы, таким образом, мост выйдет из равновесного состояния, что будет отмечено стрелочным измерительным прибором. Корректировка максимальной амплитуды отклонения стрелки измерительного прибора осуществляется резисторами RА
и R5
. С помощью переключателя можно подключать схему к дополнительным стрелочным приборам или регистрирующему прибору.
Для уменьшения погрешностей при регистрации показаний необходимо, чтобы полное сопротивление отключаемых стрелочных приборов было одинаковым с общим сопротивлением электрической цепи регистрирующего прибора. В случае не соответствия, произвести корректировку сопротивлениями RШ
, RМ
.
При измерении продольных или поперечных ускорений может быть использован один и тот же датчик, но повернутый в горизонтальной плоскости на 90°. Следует учесть, что при измерении поперечных ускорений акселерометр должен находится в центре масс.
Измерение скорости автомобиля
Скорость движения автомобиля измеряется с помощью тахогенератора переменного тока (рис. 7). Тахогенератор представляет собой статор с тремя соединенными в треугольник обмотками, внутри которого в подшипниках крышек может вращаться ротор. Тахогенератор установлен на фланце поворотного кронштейна «пятого» колеса. Ось ротора тахогенератора связана с осью «пятого» колеса через штифтовое соединение.
В результате вращения ротора при качении «пятого» колеса в обмотках статора наводится ЭДС прямо пропорционально угловой скорости ротора и сдвинутые по фазе на угол 120°. Так как радиус «пятого» колеса практически является величиной постоянной, то тахогенератор можно использовать как датчик линейной скорости центра «пятого» колеса, а, следовательно, и самого автомобиля.
Принцип действия
Сигнал с трехфазного тахогенератора переменного тока подается на двух-полупериодный выпрямитель составленный из шести полупроводниковых диодов.
В схеме предусмотрена регулировка амплитуды выходного сигнала. Для этого выход выпрямителя тахогенератора нагружен переменным резистором.
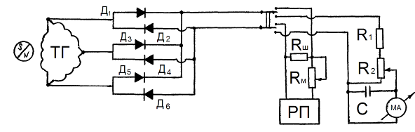
Рис. 7. Электрическая измерительная схема: Д1
– Д2
- Д 226ВП – переключатель, R1
; R2
; R3
; - 4.3 кОмRш
– шунтирующее сопротивление, С1
; С2
; С3
; - 1000х25vRм
– масштабное сопротивление
Выходной сигнал снимается с одной из крайних точек потенциометра и его движка.
Визуальный контроль скорости движения производится с помощью микроамперметра (стрелочный прибор). Необходимая максимальная амплитуда сигнала скорости регулируется при тарировке датчика. Эту тарировку периодически надо проверять, поскольку возможно случайное смещение движка потенциометра амплитудного регулятора из-за вибрации в автомобиле. Отклонение стрелки микроамперметра протарировано в км/ч.
Регистрирующий прибор – это измерительный механизм самописца, пишущее устройство, которое вычерчивает на бумажной ленте кривую изменения скорости автомобиля, развернутую во времени. Переключатель служит для перехода с визуального контроля на регистрирующий прибор.
Измерение пройденного пути автомобиля
Путь, пройденный автомобилем, измеряется не непосредственно, а путем пересчета по известному числу оборотов «пятого» колеса и его радиусу качения. Обороты прицепного, измерительного колеса фиксирует датчик, который замыкает измерительную электрическую цепь два раза за один оборот колеса. В качестве датчика использован геркон типа КЭМ – ЗА, установленный непосредственно в корпусе тахогенератора (рис. 8).
Для регистрации оборотов «пятого» колеса используется импульсный электрический счетчик (суммирующие приборы). Для четкого срабатывания импульсного счетчика применяется усилитель постоянного тока на базе транзистора КТ – 829, что позволяет облегчить режим работы контактной группы геркона.
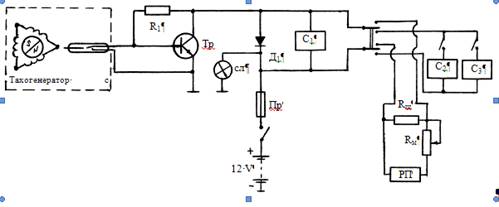
Рис. 8. Электрическая схема канала регистрации импульсов пути, R1
– 3 комТр – кт 829 А, Д1
– Д 226 БСл – сигнальная лампа, С1
; С2
; С3
– счетчики импульсовРп – регистрирующий прибор, Rш – шунтирующее сопротивлениеRм – масштабное сопротивление
Принцип действия:
Напряжение постоянного тока  В через тумблер Вк1
подается на усилитель сигнала. О включении питания сигнализирует индикаторная лампа СЛ
. В через тумблер Вк1
подается на усилитель сигнала. О включении питания сигнализирует индикаторная лампа СЛ
.
Поворот «пятого» колеса вызывает поворот магнитного поля ротора тахогенератора, что способствует замыканию и размыканию контактов геркона. В момент замыкания контактов транзистор закрывается и прерывает питание катушки электромагнитного счетчика С1
. При размыкании контактов ток течет через резистор R1
и базовый переход транзистора Тр1
в результате чего транзистор открывается и подает питание на обмотку электромагнитного счетчика С1
.
Диод Д применяется для шунтирования обратных выбросов напряжения на электрических обмотках счетчика, которые могут привести к выходу из строя транзистора. При вращении «пятого» колеса циклы включения и выключения повторяются. Счетчик регистрирует число циклов.
Расчет пройденного пути ведется по формуле:
S=L×nк
,
гдеS - пройденный путь;
L - путь пройденный за один оборот «пятого» колеса;
nк
- число оборотов «пятого» колеса.
Значение L определяется по формуле:
L=2×p×rк
,
где rк
-радиус «пятого» колеса.
Значение nк
определяется по формуле:
nк
=z/2,
где z - количество импульсов зарегистрированных электромагнитным счетчиком пройденного пути.
Примечание: В случае регистрации импульсов гальванометром самописца необходимо чтобы полное сопротивление электрической цепи гальванометра самописца соответствовало сопротивлению прежде включенных приборов. Подбор сопротивления производится сопротивлениями Rш
и Rм
.
Запись меток пути имеет на ленте самописца вид прямоугольных импульсов, наносимых два раза за один оборот «пятого» колеса.
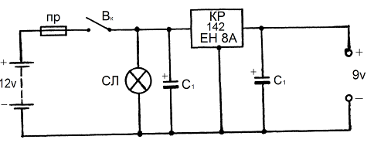
Питание измерительных цепей
Стабилизатор напряжения автоматически поддерживает напряжение на стороне потребителя с заданной точностью, так как возникает дестабилизирующие факторы, вызывающие изменение напряжения (рис. 9).
Изменение выходного напряжения обусловлено:
1. Нестабильностью питающей цепи;
2. Изменением тока потребляемой нагрузки;
3. Изменением температуры окружающей среды.
Рис. 9. Схема стабилизатора напряжения 9v для питания измерительных цепейПрименяемый тип стабилизатора, в случае установки его на радиатор охлаждения, обеспечивает стабилизированный ток до 1,5 А согласно техническим условиям на стабилизаторы данного типа.
Описанный комплекс обхватывает лабораторные циклы всех специальностей, связанных с движением АТС.
2. Результаты ездовых испытаний передвижной лаборатории на полигоне ГУП «НИЦИАМТ»
Комплекс дорожных испытаний проводился под руководством автора на автополигоне ГУП «Научно-исследовательский центр по испытаниям и доводке автомототехники» (НИЦИАМТ) РФ в апреле 2004 года (г. Дмитров). Целью проведения испытаний являлась оценка влияния изменения технического состояния АТС в эксплуатации на показатели основных эксплуатационных свойств, определяющих безопасность дорожного движения на примере маршрутного такси «Газель» в штатных и нештатных режимах движения. Объектом испытания стала научно-исследовательская учебная лаборатория на базе автомобиля ГАЗ-2705 (рис. 10).

Рис.
10. Научно-исследовательская учебная лаборатория на базе автомобиля ГАЗ-2705 в испытании «переставка»
Для определения параметров движения данное АТС было оборудовано двумя комплексами специальной измерительно-регистрирующей аппаратуры.
Первый комплекс разработан на кафедре «Автосервис, организация и безопасность движения» ЮРГУЭС под научным руководством зав. кафедрой к.т.н. Русакова В.З., преподавателями кафедры Юршиным Ю.Г., Шеметом Б.И. и Бондаревым И.В. совместно с научными консультантами МАДИ (ГТУ) д.т.н. Рябчинским А.И., д.т.н. Юрчевским А.А. и к.т.н. Додоновым Б.М. Он представляет собой комплект приборов и датчиков, согласованных для обработки с помощью аналогово-цифрового преобразователя (АЦП) сигналов и регистрируемых с помощью портативного персонального компьютера (ПК) (рис. 11). Инженером Сивоконь В.К. разработан уникальный блок питания первого комплекса.

Рис
. 11. Измерительно-регистрирующий комплекс ЮРГУЭС
Второй комплекс разработан ГУП НПО «Спецтехника и связь» МВД РФ для регистрации параметров движения (УРПД), т.н. «черный ящик» автомобиля (рис. 12).

Рис. 12. Автомобильный «черный ящик» (УРПД)
Для регистрации углов поворота рулевого колеса (РК) и управляемых колес (УК) применяются поворотные датчики потенциометрического типа первого комплекса с линейной характеристикой (рис. 13). При этом УРПД второго комплекса фиксирует факт поворота РК на угол более 5° в какую-либо сторону от нейтрального положения.
Измерение продольных и поперечных ускорений первым комплексом производится акселерометрами типа ПЛ-95 (рис. 14). В УРПД второго комплекса регистрация этих параметров осуществляется по трем координатным осям собственными датчиками.
Значения курсового угла, продольного и поперечного крена регистрируются с помощью гироскопов. Угловая скорость автомобиля измеряется прибором ДУС-6 (рис. 15).
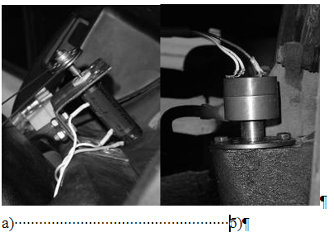
Рис. 13. Датчики углов поворота: а - РК; б – УК

Рис
. 14. Акселерометры продольных и поперечных ускорений
Для определения линейной скорости и пройденного пути используется пятое колесо с тахометрическим датчиком первого комплекса, а также электромагнитным датчиком УРПД второго комплекса, установленным на вал привода троса спидометра.
Аналоговые сигналы перечисленных датчиков поступают на вход АЦП, обрабатываются, после чего регистрируются портативным ПК. Используемый в данном комплексе АЦП (модуль Е-140) является многоканальным 14-ти разрядным устройством, позволяющим работать одновременно с 16-ю дифференциальными или 32-мя каналами с общей землей. В целях проводимых исследований нами используются 14 дифференциальных каналов. Каждый из аналоговых каналов подключается к АЦП через программно управляемый аттенюатор, позволяющий задавать один из четырех диапазонов измерения напряжений.
Модуль Е-140 обеспечивает непрерывный сбор данных на частотах дискретизации АЦП от 0,122 до 100,00 кГц. Малые габариты модуля и использование широко распространенного в последнее время интерфейса USB делают модуль Е-140 удобным для организации дорожных испытаний, требующих высокую степень мобильности.
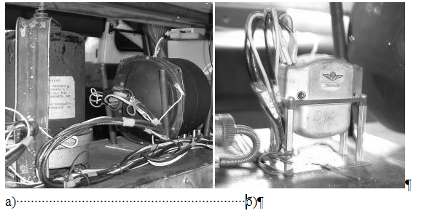
Рис. 15. Гироскопы: а - курсового угла, продольного и поперечного крена; б - угловой скорости автомобиля
Совместно с АЦП для регистрации цифровых сигналов параметров движения используется портативный ПК с предустановленным программным обеспечением (ПО) «PowerGraph 3.1 Professional», позволяющим вести непрерывную запись в режиме реального времени сколь угодно долгий период времени (ограниченный только ресурсами вычислительной системы ПК). ПО «PowerGraph» позволяет использовать персональный компьютер в качестве стандартных измерительных и регистрирующих приборов (вольтметры, самописцы, осциллографы, спектроанализаторы и т.д.).
Отличительными функциональными возможностями данного ПО являются:
- предварительный мониторинг входных сигналов;
- независимая настройка и калибровка каналов;
- поддержка любых скоростей записи;
- эффективная система графического представления больших объемов данных;
- выбор произвольного набора каналов для отображения;
- свободное позиционирование и масштабирование графиков;
- определение параметров сигналов по графикам с помощью скользящих маркеров;
- построение графиков зависимости одного канала от другого;
- построение гистограмм распределения сигналов по амплитуде;
- библиотека статистических и информационных функций анализа данных и др.
Характерной чертой применения ПК и ПО является возможность автоматической регистрации временных интервалов.
УРПД второго комплекса обрабатывает и сохраняет регистрируемые параметры на собственное ПЗУ в течение восьми часов, при этом более старые данные перезаписываются. Таким образом, в любой момент времени имеется возможность получить параметры движения АТС за последние восемь часов. При необходимости регистрации больших периодов времени движения предусмотрено использование съемных носителей информации. Информация о режиме и параметрах движения АТС, записанная таким образом, в дальнейшем может быть перенесена на ПК для расшифровки и детализации проведенных измерений.
Программа испытаний передвижной лаборатории включала следующие режимы движения:
1. Управляемое прямолинейное движение для оценки: интенсивности управления и ширины динамического коридора. То же – с торможением для оценки ширины динамического коридора.
2. Импульсное силовое воздействие на управляемые колеса от неровности дороги для оценки траекторной устойчивости в коридоре движения.
3. Стабилизация (бросок руля) - определение стандартных показателей.
4. Маневр (конечная цель - оценка запаздывания рулевого управления):
4.1. Ступенчатый поворот рулевого колеса (рывок руля).
4.2. Вход в поворот / отворот от препятствия.
4.3. Переставка / объезд неподвижного препятствия.
4.4. Движение по змейке.
Во всех случаях пункта 4 оценка стандартных показателей.
5. Маневр с торможением.
5.1. Переставка / объезд неподвижного препятствия.
5.2. Вход в поворот / отворот от препятствия.
В этих случаях оценка отклонения от эталона – нового автомобиля.
Конечной целью испытаний являлась оценка влияния факторов эксплуатации, исследуемых в этих режимах:
1. Люфт рулевого колеса – 10, 20 и 30 градусов (задается регулировкой рулевого механизма).
2. Изменение жесткости (упругости) рулевого привода путем замены элементов рулевого привода на изношенные (до аварийного состояния) шарниров рулевых тяг и др.
3. Установка гидроусилителя руля для оценки его влияния на вышеперечисленные параметры.
В заездах оценивалось сочетание упомянутых факторов. Основное внимание в испытаниях уделено эксперименту «переставка», в котором доходили до предела по сцеплению. Заезды проводились несколькими специально подготовленными водителями для возможности экспертных оценок.
В период испытаний погодно-климатические условия позволили выполнить заезды как на сухом, так и на мокром дорожном покрытии. Это позволило оценить влияние состояния дороги на упомянутые параметры эксплуатационных свойств (рис. 16).

Рис
. 16 Отрыв колеса в маневре «переставка» на мокром покрытии
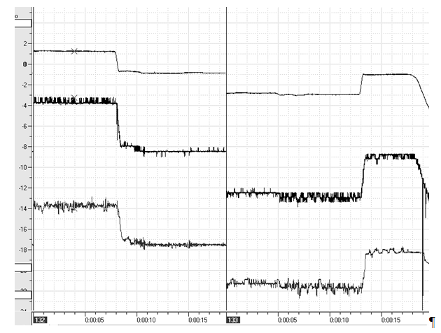
Учитывая важность с позиции безопасности дорожного движения экспериментально определялось время запаздывания рулевого управления. Записи углов поворота рулевого и отдельно левого и правого управляемых колес позволили для условий нештатного (критического) режима движения определить это время: левое УК – 0,15 с, правое УК – 0,25 с (рис. 17).
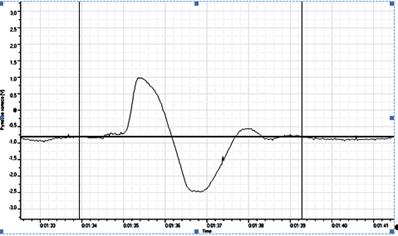
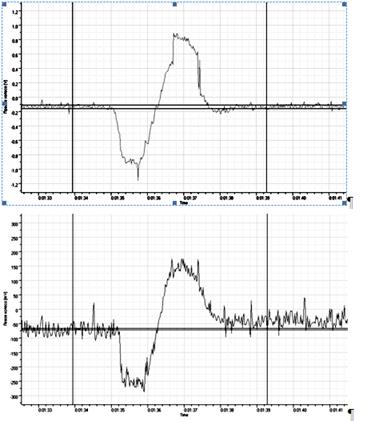
Рис. 17. Экспериментальные зависимости углов поворота рулевого и управляемых колес от времени в маневре «переставка» на сухом покрытии
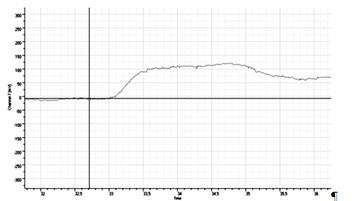
Особым результатом для проверки адекватности математических моделей курсового движения автомобиля служат записи углов поворота вокруг его вертикальной оси, а также продольных и поперечных ускорений, позволивших оценить динамику автомобиля в режиме «переставка» (рис. 18).
Рис
. 18 Экспериментальные зависимости угловой скорости, продольного и поперечного ускорений автомобиля в «переставке» на сухом покрытии
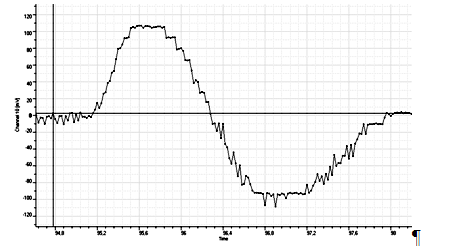
В маневре «рывок руля» экспериментальные зависимости углов поворота рулевого колеса, угловой скорости и поперечного ускорения автомобиля показали характер их изменений для условий отрыва колеса от дорожного покрытия (рис. 19).
Рис
. 19. Экспериментальные зависимости изменения угла поворота рулевого колеса, угловой скорости и поперечного ускорения автомобиля в маневре «рывок руля» на сухом покрытии
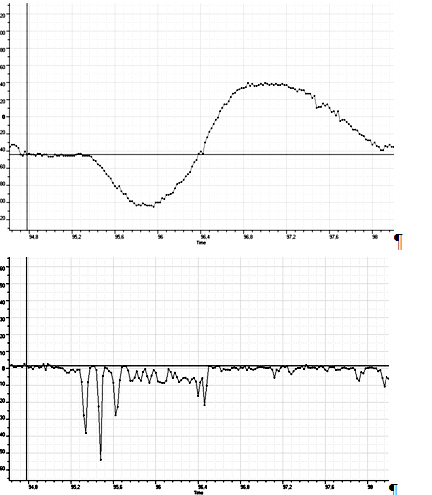
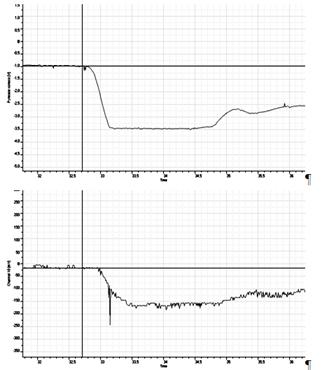
В маневре «стабилизация» (бросок руля) при движении по кругу радиусом 35 м сравнивались результаты изменения углов поворота рулевого колеса, угловой скорости и поперечного ускорения автомобиля при выходе из круга как влево, так и вправо (рис. 20).
Рис
. 20. Экспериментальные зависимости изменения угла поворота рулевого колеса, угловой скорости и поперечного ускорения автомобиля в маневре «стабилизация» на сухом покрытии
В заключении следует отметить, что набранная база экспериментальных данных уникальных совместных испытаний позволяет использовать результаты в целях как совершенствования «черного» ящика (данные испытаний расшифровываются), так и проверки адекватности моделей курсового движения.
Для учебного процесса сняты уникальные видеофильмы упомянутых маневров, опрокидывания автомобиля на стенде и др., а также приобретен преподавателями ВУЗов ценный опыт ездовых испытаний автомобилей.
3. Оценка параметров устойчивости и управляемости АТС в стендовых условиях
Устойчивость и управляемость АТС в значительной степени определяют активную безопасность автотранспортных средств (АТС) и, следовательно, общий уровень безопасности дорожного движения (БДД). В настоящее время международные и национальные стандарты как на требования АТС, так и на методы испытаний этих свойств недостаточно гармонизированы, что объясняется как сложностью регламентации всех параметров системы ВАДС (особенно водителя - испытателя), так и недостаточным метрологическим обеспечением технологии испытаний.
Кроме того, испытаниям подвергаются только новые автомобили, в то время как очевидно, что в процессе эксплуатации АТС в рулевом приводе и переднем мосте происходят выработки узлов и сопряжений, приводящие к возникновению повышенного свободного хода рулевого колена (РК), снижая большинство параметров устойчивости и упругости АТС.
Оценка этого снижения и его влияния на основные показатели БДД чрезвычайно важная проблема, решить которую в некоторой степени можно путем проведения стендовых испытаний АТС на динамических полноопорных стендах с беговыми барабанами.
Эта уверенность основывается на следующих соображениях. Основные параметры устойчивости и управляемости АТС, такие как изменение курсового угла, характеристики подруливания и легкости управления, наличие зон нечувствительности и запаздывания рулевого управления, однозначно связаны с такими показателями, как боковая сила в пятне контакта управляемых колес с дорожной поверхностью, усилие на рулевом колесе и свободный ход рулевого колеса.
Значения этих показателей в настоящее время доступны к измерению при проведении стендовых испытаний. И в этом аспекте основной проблемой уже является обеспечение адекватности списываемых со стенда показателей их аналогам, измеряемым при дорожных ходовых испытаниях.
В связи с предыдущим замечанием представляется очень важным для дальнейших исследований правильный выбор типа динамического стенда. Все динамические стенды для контроля технического состояния переднего моста и рулевого управления (РУ) можно разделить на 2 группы. С помощью первой группы стендов судят о техническом состоянии этих систем по величине бокового усилия в контакте колеса и измерительного элемента. С помощью второй - непосредственно замеряют положение плоскости качения колеса относительно плоскости симметрии автомобиля.
Обе группы стендов могут быть подразделены с учетом геометрии опорных устройств, типа воспринимающего устройства и конструктивного исполнения. Оценку и выбор стенда из классификационной номенклатуры проводим по методике, разработанной С.С. Селивановым. В качестве критериев оценки были приняты следующие показатели:
- информативность,котораяопределяетсяколичествомсведенийо структурных параметрах узла или агрегата;
- соответствие условий контроля условиям эксплуатации;
- обеспечение автостабилизации колес на стенде;
- возможность, безопасность и удобство проведения регулировочных работ на стенде;
- возможность диагностирования других узлов автомобиля на стенде;
- трудоемкость диагностических операций;
- стабильность и достоверность показаний стенда;
- стоимость стенда;
- надежность и долговечность стенда.
Проведенная оценка по данной методике показала, что наибольшее количество баллов имеют диагностические роликовые стенды с одним или двумя роликами». На втором месте стоят стенды с воспринимающим боковые нагрузки одним из двух опорных барабанов. Отставание в баллах этих стендов от роликовых обусловлено только по показателю информативности, так как они не дают возможности прямого измерения углов развала и схождения управляемых колес.
Однако применение дополнительного устройства, представляющего собой воспринимающий треножник, рамки которого прижимаются к боковине вращающегося колеса, нивелирует указанный недостаток и даже выводит данный тип стендов в наиболее приемлемые для указанных исследований.
Таким образом, исследования снижения некоторых параметров устойчивости и управляемости АТС будем проводить на универсальном динамическом стенде (рис. 21), разрабатываемом на кафедре АСОиБД, (А.С.) за основу механической части которого взят стенд разработки А.А. Филимонова с конструктивными изменениями передней секции.
Колеса передней оси приводятся во вращение передними беговыми барабанами посредством асинхронного электродвигателя. Кроме того, имеется возможность привода от двигателя автомобиля как переднеприводного, так и заднеприводного, через цепную передачу между барабанами передней и задней секций.
Другой немаловажной особенностью данного стенда является возможность самоориентации автомобиля, имеющего непараллельность возможного расположения осей передних и задних колес и барабанов стенда. Без подобной самоориентации измеренные боковые силы на передних управляемых колесах неизбежно будут содержать компоненту, вызванную данной непараллельностью, что осложнит адекватную интерпретацию данных сил для анализа и оценки параметров согласно целей исследования.
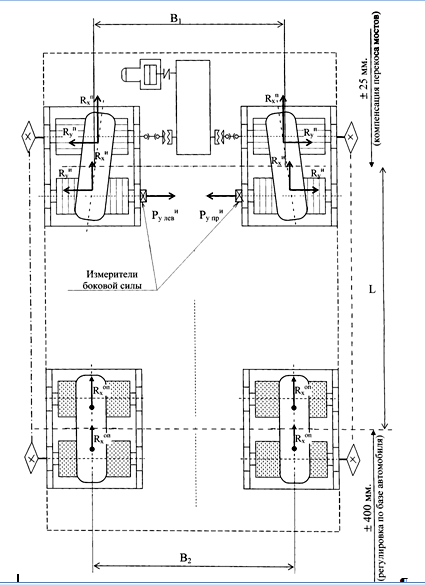
Рис. 21. Схема универсального диагностического стенда
На данном стенде эта задача решена использованием силового метода ориентации автомобиля на стенде, разработанном А. Филимоновым. В его основу положено силовое равновесие колес в поперечном направлении в процессе качения по свободно вращающимся барабанам. Ось ведущих неуправляемых колес всегда перпендикулярна направлению прямолинейного движения автомобиля. Этоможно использовать для точной ориентации автомобиля на стенде при условии, что ведущие колеса установлены на барабанах, оси которых строго параллельны по-перечной оси стенда.
Далее ведущие колеса прокручивают эти барабаны, и в результате взаимодействия сил, возникающих в местах контакта роликов и колес, ведущая ось автоматически при прокрутке занимает положение на стенде, соответствующее прямолинейному движению АТС.
Управляемые же колеса устанавливаются в нейтральное положение по отношению к продольной оси стенда поворотом руля. Причем критерием правильности установки колес в прямолинейное положение в данном случае может служить как уменьшение величины схождения при их отклонении от нейтрального положения, так и равенство боковых сил на измерительных датчиках опорных барабанов.
Проведем теоретический анализ возможности адекватного использования измеряемого значения силы Ри
у
лев (пр)
при аналогичном дорожном испытании курсового угла
Известно, что если на эластичное колесо действует при его качении по плоской поверхности боковая сила Р¶
у
, то перемещение центра колеса не будет совпадать с направлением плоскости его вращения, составляя с этой плоскостью угол увода d, который при небольших значениях (до 8°) можно приближенно найти по следующей формуле:
 , ,
где Кув
- коэффициент сопротивления уводу.
Естественно предположить, что если на колесо извне боковая сила не действует, а колесо установлено таким образом, что его направление перемещения образует с плоскостью вращения определенный угол de
,
a
(колесо установлено со схождением и развалом), то в пятне контакта колеса с опорной поверхностью появится боковая сила Р¶
¢
у
, которую также можно выразить зависимостью Р¶
¢
у
=Кув
×de
,
a
.Для конкретного типа шин и условий эксперимента величина Кув
будет зависеть от нормальной нагрузки, действующей на колесо. Для практических расчетов можно использовать формулу, предложенную Р. Смилиеем и В. Горном:
Кув
=С(А-В×Gк
)×Gк
,(1)
где А, В, С - коэффициенты, зависящие от конструкции шины.
Таким образом, зная нагрузку и тип шин, можно определить Кув
, а задаваясь величиной угла и влиянием развала - схода de
a
, определить величину боковой силы в пятне контакта при качении колеса, установленного со схождением.
Если рассматривать качение колеса по беговым барабанам стенда, то нормальная нагрузка, приходящаяся на колесо Gк
, распределяется между барабанами по известным зависимостям. Таким образом, можно предположить, что боковая сила в пятнах контакта колеса с барабанами, вызванная качением колеса со схождением, будет равна
 ,(2) ,(2)
где индексы «п» и «и» относят соответствующие параметры к приводному и измерительному барабану соответственно.
Очевидно, что
будет в несколько раз больше Р¶
¢
у
, измеренной в дорожных условиях. Это обусловлено значительным различием пятна контакта шины с опорной поверхностью при дорожных и стендовых испытаниях.
Если принять предложенное утверждение Я.М. Певзнера и Г.А. Гаспарянца о том, что боковая сила в пятне контакта пропорциональна боковой деформации шины в данной точке опорной поверхности, то можно записать:
dРу
²
=lш
×у×dx,(3)
где lш
- коэффициент, зависящий от упругих свойств шин;
у - боковая деформация шины;
у = х - tgde
+ун
»х×de
+ун
,
где ун
- боковая деформация в начальной точке контакта.
Обозначив длину пятна контакта с барабаном через 1и
(п)
и продифференцировав уравнение (1) от 0 до 1и (п)
, получаем:
 .(4) .(4)
Приняв lш
×1и(п)
=Си(п)
- коэффициент боковой жесткости шины в контакте шины с барабанами, получим:
 .(5) .(5)
Так как при малых de
,
a
,
ун
»0, то
 . .
В конкретных условиях эксперимента определение Си
(п)
и lи (п)
не представляет трудностей.
Итак, суммарная боковая сила на стенде равна
 , ,
а коэффициент перевода боковой силы F, снимаемой на стенде, в значение боковой силы F, вызывающей тот же боковой увод шины de
,
a
при качении по дороге, которой будет равен
 (6) (6)
где С»100... 140-для различных типов шин;
 ;(7) ;(7)
 ,(8) ,(8)
где Вш
- ширина профиля недеформированной шины;
D0
- свободный диаметр шины.
Таким образом, целью работы является создание математического аппарата, позволяющего путем инструментального контроля на универсальном диагностическом стенде отслеживать изменение некоторых параметров устойчивости и управляемости АТС в процессе эксплуатации, а также выявление и анализ влияния наработок в агрегатах, узлах и механизмах АТС на изменение данных параметров и на снижение безопасности движения и прогнозирование критических значений указанных наработокпо условиям безопасности движения.
Прелагается примерный алгоритм:
- автомобиль на стенде проходит комплексные испытания;
- снимаемые параметры, а также измеренные ранее подставляем в качестве входных в математическую модель поведения автомобиля на стенде;
- на выходе получаем углы увода колес автомобиля и соответствующие им боковые силы;
- полученные значения в качестве входных параметров вносятся в математическую модель криволинейного движения автомобиля (часть входных параметров задают режим криволинейного движения – тип выполняемого маневра);
- на выходе получаем показателя устойчивости и управляемости АТС, характеризующие БДД;
- производится анализ технического состояния АТС и связанное с ним ухудшение БДД по параметрам устойчивости и управляемости;
- делают прогноз критического значения наработок в анализируемых агрегатах и узлах (рулевое управление, передний мост, шины) по указанным параметрам.

а)
б)
Рис. 22. Схема привода от двигателя автомобиля (передний привод): а) фронтальный вид; б) вид сверху

а)
б)
Рис.23. Схема привода от электродвигателя барабана (задний привод): а) фронтальный вид; б) вид сверху
Далее решаются промежуточные задачи:
- разработать методику испытаний АТС на стенде, позволяющую отследить влияние указанных ранее наработок на значение снимаемых с измерителя боковых сил параметра – Рy
и
;
- разработать математическую модель автомобиля на стенде, позволяющую получать значения углов увода колес автомобиля и соответствующих им боковых сил, адекватных криволинейному движению автомобиля;
- разработать математическую модель криволинейного движения автомобиля и комплексы входных параметров, адекватно отражающие различные режимы движения и маневры автомобиля;
- данная модель должна в качестве выходных параметров иметь показатели БДД по условиям устойчивости и управляемости;
- проведение полигонных испытаний испытуемых автомобилей и получение указанных выше показателей БДД;
- сравнение результатов и выводы.
Принимаем общие допущения:
При проведении полигонных испытаний в рассматриваемых нами режимах движения управляемые колеса поворачиваются на угол менее 15°, т.е. автомобиль движется по траектории сравнительно больших радиусов и на высоких скоростях. Поэтому стендовые испытания предлагается проводить при углах поворота управляемых колес не более 10°.
Предполагается, что в данных режимах испытаний можно достоверно отследить влияние ухудшения тех. состояния АТС на снимаемые со стенда параметры, и при этом избежать больших нелинейных ошибок, возникающих из-за особенностей контакта шины с поверхностью барабанов.
Остальные допущения и условия обосновываются и оговариваются в соответствующих моделях.
Выводы и рекомендации
1. Существуют известные зависимости, отражающие изменение нормальных реакций на колесо со стороны барабанов (RN
п
и RN
и
) в различных режимах испытаний. Необходимо проанализировать следующие предположения:
RN
п
/ RN
и
= RX
п
/ RX
и
= RY
п
/ RY
и
;
RN
п
+ RN
и
= Gк
;
RY
п
+ RY
и
= РY
,
из которых можно найти значение РY
, сняв с измерительного устройства значение RY
и
.
2. В режиме испытаний на стенде, когда движение колеса осуществляется посредством привода автомобиля (передний привод), реакции RY
п
и RY
и
сонаправлены. В случае, когда управляемые колеса приводятся во вращение электроприводом барабана или двигателем автомобиля (задний привод) через цепную передачу, данные реакции противоположно направлены, причем меняется направление реакции RY
п
. При этом изменяется форма пятна контакта шины и приводного барабана. Это приводит к тому, что деформация шины в обоих случаях (особенно во втором) значительно отличается от ее деформации в дорожных условиях.
В связи с этим высказывается предложение синхронного привода от двигателя автомобиля и электродвигателя приводных барабанов с целью взаимной нейтрализации возникающих реакций RY
п
. Согласно данному предложению, суммарная боковая реакция на колесе будет равна нулю при равенстве касательных скоростей колеса и барабана (wб
×rб
= wк
×rк
).
Поскольку радиус колеса в процессе испытаний изменяется, то в качестве синхронизирующего фактора, определяющего передаточное число скоростей вращения барабана и колеса, предлагается изменяющееся расстояние между осями вращения колеса и барабана. Либо, если анализ позволит заключить о малых погрешностях результатов при допущении rк
= const, синхронизировать скорости вращения колес и барабанов через постоянное отношение их радиусов.
3. При выполнении предыдущего условия логически приходимк отсутствию касательных реакций в этом пятне контакта. Отсюда можно сделать вывод о том, что при данном режиме испытаний характер взаимодействия приводного управляемого колеса автомобиля с приводным барабаном будет идентичен состоянию покоя. При этом на измерительных барабанах сохраняются те же физические процессы, что и без описанной синхронизации. На наш взгляд, данный режим значительно приближает стендовое испытание к дорожному в вопросе идентичности пятна контакта, но данное предложение требует теоретического обоснования и практического подтверждения.
4. Не совсем понятен характер распределения нормальных реакций на колесо в описанном режиме и, как следствие, доля касательной и боковой реакций на колесо со стороны измерительного барабана.
Библиографический список
1. Авдонькин Ф.Н. Оптимизация изменения технического состояния автомобиля в процессе эксплуатации / Ф.Н. Авдонькин. – М.: Транспорт, 2008. – 350 с.
2. Артемьев А.Н. Моделирование управляемого движения автомобиля с целью оптимизации параметров, влияющих на управляемость. - Дис. … канд. техн. наук / А.Н. Артемьев. - М., 2008. - 158 с.
3. Байэтт Р. Расследование дорожно-транспортных происшествий: Пер. с англ. / Р. Байэтт, Р. Уоттс. -М.: Транспорт, 2009. - С. 288.
4. Болдин А.П. Научные основы разработки и использования систем внешнего и встроенного диагностирования на автомобильном транспорте. Дис. … док. тех. наук. - М., 2007. - 430 с.
5. Венгеров И.А., Сурков С.В. Автомобильный транспорт и проблема повышения безопасности дорожного движения. // Вестник Российского автотранспортного союза. - 2010. - №1. - С. 25-30. Государственный доклад по безопасности дорожного движения за 2000 г.
6. Волошин Г.Я. Анализ дорожно-транспортных происшествий / Г.Я. Волошин, В. П. Мартынов, А. Г. Романов. – М.: Транспорт, 2007. – 240 с.
7. Гержодов В.И. Техническое состояние автомобилей и безопасность движения / В.И. Гержодов. – К.: Техника, 2008. – 149 с.
8. Говорущенко Н.Я. Диагностика технического состояния автомобилей / Н.Я. Говорущенко. - М.: Транспорт, 2010. – С. 54.
9. Денисов А.С. Основы формирования эксплуатационно-ремонтного цикла автомобилей / А.С. Денисов. – Саратов: Сарат. гос. техн. ун-т, 2009. – 352 с.
10. Диваков Н.В. Топливный баланс автомобиля / Н.В. Диваков, А.Н. Стрельников // Автомобильная промышленность. -2011. - №8. - С. 13-14.
11. Иларионов В.А. Стабилизация управляемых колес автомобиля / В.А. Иларионов. – М.: Транспорт, 2006. – 167 с.
12. Кислицын Н.М. Определение углов установки управляемых колёс при движении автомобиля / Н.М. Кислицын, Ю.В. Максимов // Автомобильная промышленность. – 2007. - №9. - С. 26-27.
13. Кнороз В.И. Работа автомобильной шины / В.И. Кнороз. - М.: Транспорт, 2006. – 238 с.
14. Коллинз Д. Анализ дорожно-транспортных происшествий / Д. Коллинз, Д. Моррис. – М.: Транспорт, 2011. - С. 128.
15. Лаврентьев П. Совершенствование государственного контроля безопасности автотранспортных средств / П. Лаврентьев // Автомобильный транспорт – 2010. -№3.- С. 45.
16. Литвинов А.С. Исследование кинематики рулевого управления с учётом кинематики передней подвески / А.С. Литвинов, Ю.М. Немцов, С.А. Тимофеев // Автомобильная промышленность. – 2010. - №1. - С. 11-I3.
17. Логинов В.Н. Электрические измерения механических величин, 2-е изд., перераб. и доп / В.Н. Логинов. -М.: Энергия, 2006. - 102 с.
18. Малюков А.А. Научные основы стендовых испытаний автомобилей на активную безопасность. Дис. … док. тех. наук. - М., 2008. - 546 с.
|