| Дипломна робота
Дослідження двовимірної квадратичної стаціонарної системи із двома приватними інтегралами у вигляді кривих другого порядку
Зміст
Введення
1. Побудова квадратичних двовимірних стаціонарних систем
1.1 Побудова квадратичної двовимірної стаціонарної системи із приватним інтегралом у вигляді параболи
1.2 Побудова квадратичної двовимірної стаціонарної системи із приватним інтегралом у вигляді окружності або гіперболи
1.3 Необхідні й достатні умови існування в системи (1.1) двох часток інтегралів (1.3), (1.13)
2. Якісне дослідження побудованих класів систем
2.1 Дослідження системи (1.1) з коефіцієнтами, заданими формулами (1.28) - (1.31)
2.2 Дослідження системи (1.1) з коефіцієнтами, заданими формулами (1.41) - (1.42)
2.3 Дослідження системи (1.1) з коефіцієнтами, заданими формулами (1.52) - (1.53)
Висновок
Список джерел
Додатки
Реферат
Дипломна робота ____ сторінок, 11 джерел.
Ключові слова й словосполучення: квадратична двовимірна стаціонарна система, приватний інтеграл, парабола, гіпербола, окружність, крапка, характеристичне рівняння, характеристичне число, вузол, сідло, фокус.
Дана робота містить результати досліджень автора, що ставляться до якісного дослідження в цілому двовимірної квадратичної стаціонарної системи.
Основним інструментом досліджень є поняття приватного інтеграла.
Робота складається із двох глав.
У першому розділі проводиться побудова квадратичних двовимірних стаціонарних систем із заданими інтегралами, при цьому коефіцієнти інтегралів виражаються через коефіцієнти системи, а коефіцієнти системи зв'язані між собою трьома співвідношеннями.
У другому розділі проводиться якісне дослідження в цілому виділених у першому розділі класів систем при фіксованих значеннях деяких параметрів.
Відомо, що в елементарних функціях і навіть у квадратурах інтегруються далеко не всі класи диференціальних рівнянь. У зв'язку із цим з'явилася необхідність у створенні такої теорії, за допомогою якої можна було б вивчати властивості рішень диференціальних рівнянь по виду самих рівнянь. Такою теорією, поряд з аналітичної, і є якісна теорія диференціальних рівнянь.
Уперше задача якісного дослідження для найпростішого випадку системи двох диференціальних рівнянь із повною виразністю була поставлена А. Пуанкаре [7]. Пізніше дослідження А. Пуанкаре були доповнені И. Бендиксоном [3, с. 191-211] і уточнені Дж.Д. Биркгофом [4, с.175-179].
Реклама

 (0.1) (0.1)
Однієї із задач якісної теорії диференціальних рівнянь є вивчення поводження траєкторій динамічної системи (0.1) на фазовій площині в цілому у випадку, коли P (x,y) і Q (x,y) - аналітичні функції. Інтерес до вивчення цієї системи або відповідного їй рівняння пояснюється їх безпосереднім практичним застосуванням у різних областях фізики й техніки.
 (0.2) (0.2)
Є багато робіт, у яких динамічні системи вивчалися в припущенні, що їхніми частками інтегралами є алгебраїчні криві. Поштовхом до більшості з них послужила робота Н.П. Еругина [6, с.659 - 670], у якій він дав спосіб побудови систем диференціальних рівнянь, що мають як свій приватний інтеграл криву заданого виду.
Знання одного приватного алгебраїчного інтеграла системи (0.1) у багатьох випадках допомагає побудувати повну якісну картину поводження інтегральних кривих у цілому. Відзначимо ряд робіт цього характеру для систем (0.1), у яких P (x,y) і Q (x,y) - поліноми другого ступеня.
Н.Н. Баутиним [1, с.181 - 196] і Н.Н. Серебряковою [8, с.160 - 166] повністю досліджений характер поводження траєкторій системи (0.1), що має два алгебраїчних інтеграли у вигляді прямих. В [10, с.732 - 735] Л.А. Черкасом таке дослідження проведене для рівняння (0.2) при наявності приватного інтеграла у вигляді кривої третього порядку. Яблонський А.И. [11, с.1752 - 1760] і Филипцов В.Ф. [9, с.469-476] вивчали квадратичні системи із припущенням, що приватним інтегралом були алгебраїчні криві четвертого порядку.
У даній роботі розглядається система
 (0.3) (0.3)
і проводиться якісне дослідження в цілому системи (0.3) за умови, що приватним інтегралом є крива четвертого порядку, що розпадається на дві криві другого порядку, одна й з яких парабола, друга окружність або гіпербола.
Робота складається із двох глав.
У першому розділі проводиться побудова квадратичних двовимірних стаціонарних систем із заданими інтегралами, при цьому коефіцієнти інтегралів виражаються через коефіцієнти системи, а коефіцієнти системи зв'язані між собою трьома співвідношеннями.
У другому розділі проводиться якісне дослідження в цілому виділених у першому розділі класів систем при фіксованих значеннях деяких параметрів.
1.
Побудова квадратичних двовимірних стаціонарних систем
1.1
Побудова квадратичної двовимірної стаціонарної системи із приватним інтегралом у вигляді параболи
Розглянемо систему диференціальних рівнянь
Реклама

(1.1)
Нехай система (1.1) має приватний інтеграл виду:
 , (1.2) , (1.2)
де Fk (x,y) - однорідні поліноми від x і y ступеня k.
Як приватний інтеграл (1.2) візьмемо параболу виду:
F (x,y) (y+ (1 x2 + (2 x+ (3 = 0 (1.3)
Будемо припускати, що (3 (0, тобто парабола не проходить через початок координат.
Згідно [10, с.1752-1760] для інтеграла (1.3) системи (1.1) має місце співвідношення:
   , (1.4) , (1.4)
де L (x,y) = px+my+n, p, m, n - постійні.
Тоді випливаючи формулі (1.4) одержимо рівність:
(2 (1x+ (2) (ax+by+a1x2+2b1xy+c1y2) + (cx+dy+a2x2+2b2xy+c2y2) = (y+ (1x2+ (2x+ (3) (px+my+n).
Дорівнюючи коефіцієнти при однакових ступенях xm yn ліворуч і праворуч, одержимо рівності:
(2a1-p) (1= 0 (1.51), (4b1-m) (1= 0 (1.52), 2 (1c1= 0 (1.53)
(2a-n) (1+ (a1-p) (2+a2= 0 (1.61)
2 (1b+ (2b1-m) (2+2b2+p= 0 (1.62)
(2c1+c2-m= 0 (1.63), (a-n) (2-p (3n+c= 0 (1.71)
(2b- (3m+d-n= 0 (1.72), (3n= 0 (1.73)
Нехай (1 (0, тоді з рівностей (1.51), (1.52), (1.53), (1.63) і (1.73) одержуємо, що
P=2a1, m=4b1, c1=0, c2=4b1, n=0 (1.8)
Зі співвідношень (1.61), (1.62) і (1.71) знайдемо вираження коефіцієнтів кривій (1.3) через коефіцієнти системи (1.1) у наступному виді:
a1 , (1.9) , (1.9)
a2 , (1.10) , (1.10)
a3.  (1.11) (1.11)
Рівність (1.72) з урахуванням отриманих виражень (1.9) - (1.11), дасть умову, що зв'язує коефіцієнти a, b, c, d, a1, a2, b1, b2:
 (1.12) (1.12)
Отже, установлена наступна теорема:
Теорема 1.1 Система (1.1) має приватний інтеграл (1.3), коефіцієнти якого виражаються формулами (1.9) - (1.11), за умови, що коефіцієнти системи зв'язані співвідношенням (1.12) і c1= 0, c2= 4b1, a1 (0, 2b1a-a1b (0.
1.2
Побудова квадратичної двовимірної стаціонарної системи із приватним інтегралом у вигляді окружності або гіперболи
Нехай тепер система (1.1) поряд з інтегралом (1.3) має інтеграл у вигляді:
y2+ (x2+ (x+ (y+ (=0 (1.13)
Будемо розглядати тепер систему:
 (1.14) (1.14)
Відповідно до формули (1.4), де L
(x,y) = m1x+n1y+p1,m1, n1, p1 - постійні для системи (1.1), маємо:
(2a1-m1) (2= 0 (1.151)
(4b1-n1) (+2a1= 0 (1.152)
m1= 4b2 (1.153)
n1=8b1 (1.154)
(2a-p1) (+ (a1-m1) (+a2 (=0 (1.161)
2b (+ (2b1-n1) (+ (2b2-m1) (+2c= 0 (1.162)
(4b1-n1) (+2d-p1= 0 (1.163)
(a-p1) (+c (+m1 (= 0 (1.171)
b (+ (d-p1) (-n1 (= 0 (1.172)
p1 (= 0 (1.173)
Припустимо, що крива не проходить через початок координат, тобто ( (0.Нехай ( (0, тоді з рівностей (1.151), (1.153), (1.154) і (1.173) одержуємо, що
m1=4b2, n1=8b1, a1=2b2, p1=0 (1.18)
А зі співвідношень (1.161), (1.163) і (1.171) знайдемо вираження коефіцієнтів кривій (1.13) через коефіцієнти системи (1.1) у наступному виді:
 (1.19), (1.19),  (1.20) (1.20)
 (1.21), (1.21),  (1.22) (1.22)
Підставляючи коефіцієнти (, (, (і (у рівності (1.162) і (1.172), одержимо дві умови, що зв'язують коефіцієнти a, b, c, d, a2, b1, b2:
 (1.23) (1.23)
 (1.24) (1.24)
Отже, установлена наступна теорема:
Теорема 1.2 Система (1.14) має приватний інтеграл (1.13), коефіцієнти якого виражаються формулами (1.19) - (1.22), за умови, що коефіцієнти системи зв'язані співвідношеннями (1.23), (1.24) і b1 (0, b2 (0, a1=2b2.
1.3
Необхідні й достатні умови існування в системи (1.1) двох часток інтегралів (1.3), (1.13)
У розділах 1.1-1.2 ми одержали, що система (1.1) буде мати дві частки інтеграла у вигляді кривих другого порядку за умови, що коефіцієнти системи зв'язані співвідношеннями:
 (1.25) (1.25)

Причому b1 (0, b2 (0, a1 (0, b1a-b2b (0.
Виражаючи c з першого рівняння системи (1.25), одержимо
 (1.26) (1.26)
Підставимо (1.26) у друге й третє рівняння системи (1.25).
Одержимо два співвідношення, що зв'язують параметри a, b, d, a2, b1, b2:
 . .
Нехай  і і
 (1.27) (1.27)
З першого рівняння системи (1.27) одержимо

Підставляючи в друге рівняння системи (1.27), знайдемо
 . .
Зі співвідношень (1.25) при умовах (1.27) одержуємо, що коефіцієнти системи (1.1) визначаються наступними формулами:
(1.28)
(1.29)
 (1.30) (1.30)
 , ,  , ,  , ,  , ,  (1.31) (1.31)
Рівності (1.9) - (1.11), (1.19) - (1.22) за умови, що мають місце формули (1.28) - (1.31), дадуть наступні вираження для коефіцієнтів інтегралів (1.3) і (1.13):
a1 (1.32) (1.32)
a2 (1.33) (1.33)
a3 (1.34) (1.34)
s (1.35) (1.35)
b (1.36) (1.36)
g (1.37) (1.37)
d (1.38) (1.38)
Теорема 1.3 Система (1.1) має приватні інтеграли виду (1.3) і (1.13) з коефіцієнтами, певними формулами (1.32) - (1.38), за умови, що коефіцієнти системи (1.1) виражаються через параметри по формулах (1.28) - (1.31).
Нехай
 (1.39) (1.39)
З першого рівняння системи (1.39) знайдемо
 , ,  . .
Підставляючи  в друге рівняння системи (1.39), одержимо рівність: в друге рівняння системи (1.39), одержимо рівність:
 (1.40) (1.40)
Оскільки , те розглянемо два випадки:  , тоді , тоді  . .
Зі співвідношень (1.25) при умовах (1.39) і (1.40) одержуємо, що коефіцієнти системи (1.1) визначаються наступними формулами:
 , , , ,  (1.41) (1.41)
, ,  , , (1.42) , , (1.42)
Рівності (1.9) - (1.11), (1.19) - (1.22) за умови, що мають місце формули (1.41) - (1.42), дадуть наступні вираження для коефіцієнтів інтегралів (1.3) і (1.13):
a1 (1.43),a2 (1.43),a2 (1.44) (1.44)
a3 (1.45), s (1.45), s (1.46) (1.46)
(=0 (1.47)
g (1.48), (1.48),
d (1.49) (1.49)
Теорема 1.4 Система (1.1) має приватні інтеграли виду (1.3) і (1.13) з коефіцієнтами, певними формулами (1.43) - (1.49), за умови, що коефіцієнти системи (1.1) виражаються через параметри по формулах (1.41) - (1.42).
б)  (1.50), (1.50), (1.51) (1.51)
З (1.50) знайдемо  : :

Зі співвідношень (1.25) при умовах (1.39) і (1.50) - (1.51) одержуємо, що коефіцієнти системи (1.1) визначаються наступними формулами:
,  - будь-яке число, - будь-яке число,  (1.52) (1.52)
, , , ,  (1.53) (1.53)
Рівності (1.9) - (1.11) і (1.19) - (1.22) за умови, що мають місце формули (1.52) - (1.53), дадуть наступні вираження для коефіцієнтів інтегралів (1.3) і (1.13):
(1=0 (1.54), a2 (1.55)
a (1.56) (1.56)
s (1.57) (1.57)
b (1.58) (1.58)
g (1.59)
d (1.60) (1.60)
Теорема 1.5 Система (1.1) має приватні інтеграли виду (1.3) і (1.13) з коефіцієнтами, певними формулами (1.54) - (1.60), за умови, що коефіцієнти системи (1.1) виражаються через параметри по формулах (1.52) - (1.53).
2.
Якісне дослідження побудованих класів систем
2.1
Дослідження системи (1.1) з коефіцієнтами, заданими формулами (1.28) - (1.31)
Будемо проводити наше дослідження в припущенні, що  , ,  , ,  . .
Нехай ми маємо систему (1.1), коефіцієнти якої визначаються відповідно до формул (1.28) - (1.31), тоді система (1.1) запишеться у вигляді:
 (2.1) (2.1)
Інтегральні криві в цьому випадку мають вигляд:
 (2.2) (2.2)
 (2.3) (2.3)
Знайдемо стани рівноваги системи (2.1). Дорівнявши праві частини системи нулю й виключивши змінну y, одержимо наступне рівняння для визначення абсцис станів рівноваги:
 (2.4) (2.4)
З (2.4) одержуємо, що
 , ,  , ,  , ,  . .
Ординати крапок спокою мають вигляд:
 , ,  , ,  , ,  . .
Отже, маємо крапки
 , ,  , ,  , ,  . .
Досліджуємо поводження траєкторій на околицях станів рівноваги  , ,  , ,  , ,  . .
Досліджуємо крапку .
Складемо характеристичне рівняння в крапці .
Звідси
 , ,  (2.5) (2.5)
 , , 
Отже, характеристичне рівняння прийме вид:
 = = =0. =0.
 , ,
Або
 . .
Характеристичними числами для крапки системи (2.1) будуть
 . .
Коріння  - дійсні, різних знаків не залежно від параметра d. Отже, крапка - сідло. - дійсні, різних знаків не залежно від параметра d. Отже, крапка - сідло.
Досліджуємо крапку
.
Складемо характеристичне рівняння в крапці
 . .
Згідно
рівностям (2.5) характеристичне рівняння прийме вид:
 , ,
Або
 . .
Характеристичними числами для крапки системи (2.1) будуть
 , ,
тобто
 , ,  . .
Коріння - дійсні й одного знака, що залежать від параметра d. Якщо d (0, то крапка  - нестійкий вузол, якщо d (0, то крапка - стійкий вузол. Досліджуємо крапку - нестійкий вузол, якщо d (0, то крапка - стійкий вузол. Досліджуємо крапку  . .
Застосовуючи рівності (2.5), складемо характеристичне рівняння в крапці
:

Характеристичними числами для крапки
системи (2.1) будуть  , тобто , тобто  , ,  . Коріння . Коріння  - дійсні й одного знака, що залежать від параметра d. Якщо d<0, то крапка - дійсні й одного знака, що залежать від параметра d. Якщо d<0, то крапка  - стійкий вузол, якщо d>0, то крапка - нестійкий вузол. - стійкий вузол, якщо d>0, то крапка - нестійкий вузол.
Досліджуємо крапку
 . .
Складемо характеристичне рівняння в крапці
.
Застосовуючи рівності (2.5), одержимо:
 , ,
Або

Характеристичними числами для крапки

системи (2.1) будуть
 , ,
тобто
 , ,  . .
Коріння  - дійсні й різні знаки не залежно від параметра d. Виходить, крапка - дійсні й різні знаки не залежно від параметра d. Виходить, крапка  - сідло. - сідло.
Досліджуємо нескінченно - вилучену частину площини наприкінці осі oy. Перетворення
 [7] [7]
переводить систему (2.1) у систему:
 (2.6) (2.6)
де  . .
Для дослідження станів рівноваги на кінцях осі y, нам необхідно досліджувати тільки крапку  . Складемо характеристичне рівняння в крапці . Складемо характеристичне рівняння в крапці . .
 Одержимо, що Одержимо, що
 
Коріння - дійсні й одного знака. Отже, крапка  - стійкий вузол. - стійкий вузол.
Досліджуємо нескінченно - вилучену частину площини поза кінцями осі oy перетворенням [7]  Це перетворення систему (2.1) переводить у систему: Це перетворення систему (2.1) переводить у систему:
 (2.7) (2.7)
де .
Вивчимо нескінченно - вилучені крапки на осі U, тобто при z=0. Маємо:

Одержуємо, що  . Отже, станів рівноваги поза кінцями осі oy немає. . Отже, станів рівноваги поза кінцями осі oy немає.
Тепер дамо розподіл станів рівноваги системи (2.1) у вигляді таблиці 1.
Таблиця 1.
| d
|
|

|

|

|
∞
|
| x=0
|
| (-∞; 0)
|
сідло
|
невуст. вузол
|
вуст. вузол
|
сідло
|
вуст. вузол
|
| (0; +∞)
|
сідло
|
вуст. вузол
|
невуст. вузол
|
сідло
|
вуст. вузол
|
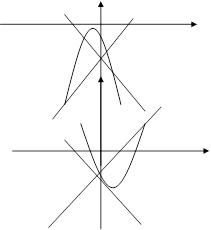
Положення кривих (2.2), (2.3) і розташування щодо їхніх станів рівноваги при d (0 і d (0 дається відповідно мал.1 (а, б).
Поводження траєкторій системи в цілому при d (0 і d (0 дається мал.4 (а, б) додатка А: Поводження траєкторій системи (2.1).
Досліджуючи вид кривих (2), (2.3) і розташування щодо їхніх станів рівноваги, переконуємося, що система (2.1) не має граничних циклів, тому що Воробйов А.П. [5] довів, що для систем, праві частини яких є поліноми другого ступеня, граничний цикл може оточувати тільки крапку типу фокуса. З огляду на розташування станів рівноваги відносно кривих (1.3) і (1.13), що є інтегралами системи (2.1), характер стану, містимо, що для системи (2.1) не може існувати граничних циклів, що оточують кілька станів рівноваги.
а (d (0)
б (d (0)
Мал.1
2.2
Дослідження системи (1.1) з коефіцієнтами, заданими формулами (1.41) - (1.42)
Будемо проводити наше дослідження в припущенні, що
  
Нехай ми маємо систему (1.1), коефіцієнти якої визначаються формулами (1.41) - (1.42). Тоді система (1.1) буде мати вигляд:
 (2.8) (2.8)
Інтегральні криві в цьому випадку мають вигляд:
 (2.9) (2.9)
 (2.10) (2.10)
Приватний інтеграл (1.13) у цьому випадку перетворюється у дві прямі (2.10)
1. Знайдемо стани рівноваги системи (2.8). Для цього дорівняємо праві частини системи нулю
Розглянемо два випадки:

Одержуємо:


З першого рівняння знайдемо y:

і підставляючи y у друге рівняння одержимо:

Вирішуючи це рівняння, знаходимо:
 . .
Отже, одержуємо
 , , 
 , , 
Отже, одержуємо крапки
 , ,  , ,  , , 
і пряму x=0, що є траєкторією системи (2.8).
2. Досліджуємо поводження траєкторій на околицях станів рівноваги 
Досліджуємо крапку  . .
Складемо характеристичне рівняння в крапці  . .
Звідси
 (2.11) (2.11)


Отже, характеристичне рівняння прийме вид:
Характеристичними числами для крапки системи (2.8)
будуть  , ,  . Коріння . Коріння  - дійсні й різні знаки не залежно від параметра d, значить крапка - сідло. Досліджуємо крапку . Згідно (2.11) складемо характеристичне рівняння в крапці - дійсні й різні знаки не залежно від параметра d, значить крапка - сідло. Досліджуємо крапку . Згідно (2.11) складемо характеристичне рівняння в крапці  : :
Характеристичними числами для крапки системи (2.8) будуть  , ,  . .
Коріння  - дійсні й одного знака, що залежать від параметра d. Якщо d<0, то крапка - нестійкий вузол, а якщо d>0, то крапка - дійсні й одного знака, що залежать від параметра d. Якщо d<0, то крапка - нестійкий вузол, а якщо d>0, то крапка  - стійкий вузол. - стійкий вузол.
3. Досліджуємо поводження траєкторій в околиці крапки  . .
Складемо характеристичне рівняння згідно (2.11)
 . .
Характеристичними числами для крапки  системи (2.8) будуть системи (2.8) будуть
 , , 
Коріння - дійсні й одного знака, що залежать від параметра d. Якщо d<0, то крапка - стійкий вузол, якщо d>0, то крапка - нестійкий вузол.
4. Досліджуємо поводження траєкторій в околиці крапки  . .
Згідно (2.11) складемо характеристичне рівняння:


Характеристичними числами для крапки системи (2.8)
будуть  , ,  . Коріння - дійсні й різні знаки не залежно від параметра d, отже - сідло. Досліджуємо нескінченно - вилучену частину площини системи (2.8) поза кінцями осі oy. Перетворення [7] . Коріння - дійсні й різні знаки не залежно від параметра d, отже - сідло. Досліджуємо нескінченно - вилучену частину площини системи (2.8) поза кінцями осі oy. Перетворення [7]  переводить систему (2.8) у систему: переводить систему (2.8) у систему:
 (2.12) (2.12)
де  . .
Вивчимо нескінченно - вилучені крапки на осі U, тобто при z=0. Одержуємо:
Отже  . .
Таким чином, одержуємо дві крапки N1 (0,-1) і N2 (0,1), які є станом рівноваги. Досліджуємо характер цих крапок звичайним способом.
Складемо характеристичне рівняння в крапці N1 (0,-1).

 (2.13), (2.13),  . Маємо: . Маємо:
 , ,  . .
Коріння - дійсні й різні за знаком, отже крапка N1 (0,-1) - сідло.
Досліджуємо крапку N2 (0,1). Згідно (2.13) складемо характеристичне рівняння:
 , ,  . .
Коріння - дійсні й одного знака, значить крапка N2 (0,1) - стійкий вузол.
Досліджуємо кінці осі y за допомогою перетворення [7]  . Це перетворення переводить систему (2.8) у систему: . Це перетворення переводить систему (2.8) у систему:
 (2.14) (2.14)
де  . .
Для дослідження станів рівноваги на кінцях осі y, нам необхідно досліджувати тільки крапку N3 (0,0). Складемо характеристичне рівняння в крапці N3 (0,0):
 , , 
Коріння - дійсні й одного знака, значить крапка N3 (0,0) - нестійкий вузол.
Тепер дамо розподіл станів рівноваги системи (2.1) у вигляді таблиці 2.
Таблиця 2.
| d
|

|
|

|

|
∞
|
| N1
|
N2
|
N3
|
| (-∞; 0)
|
сідло
|
невуст. вузол
|
вуст. вузол
|
сідло
|
сідло
|
вуст. вузол
|
невуст. вузол
|
| (0; +∞)
|
сідло
|
вуст. вузол
|
невуст. вузол
|
сідло
|
сідло
|
вуст. вузол
|
невуст. вузол
|
Положення кривих (2.9), (2.10) і розташування щодо їхніх станів рівноваги при d (0 і d (0 дається відповідно мал.2 (а, б).
Поводження траєкторій системи в цілому при d (0 і d (0 дається мал.5 (а, б) додатка Б: Поводження траєкторій системи (2.8).
Питання про існування граничних циклів не виникає, тому що Воробйов А.П. [5] довів, для квадратичної системи граничний цикл не може оточувати вузол.
а (d<0) б (d>0)
Мал.2
2.3
Дослідження системи (1.1) з коефіцієнтами, заданими формулами (1.52) - (1.53)
Будемо проводити наше дослідження в припущенні, що  , ,    . Нехай ми маємо систему (1.1), коефіцієнти якої визначаються формулами (1.52) - (1.53). Тоді система (1.1) буде мати вигляд: . Нехай ми маємо систему (1.1), коефіцієнти якої визначаються формулами (1.52) - (1.53). Тоді система (1.1) буде мати вигляд:
 (2.15) (2.15)
Інтегральні криві в цьому випадку мають вигляд:
 (2.16) (2.16)
 (2.17) (2.17)
Тобто приватні інтеграли (1.3) і (1.13) перетворюються в прямі таким чином, що інтегральна крива (2.16) збігається з однієї із прямих інтегральній кривій (2.17).
Знайдемо стани рівноваги системи (2.15). Дорівнявши праві частини системи нулю, і виключивши змінну y, одержимо наступне рівняння для визначення абсцис станів рівноваги:
 (2.18) (2.18)
З (2.18) одержуємо, що
 , ,  , ,  . .
Ординати крапок спокою мають вигляд:
 , ,  , ,  . .
Отже, маємо крапки
 , ,  , ,  . .
Досліджуємо поводження траєкторій на околицях станів рівноваги  . .
Досліджуємо стан рівноваги в крапці  . .
Складемо характеристичне рівняння.
Звідси
 (2.19) (2.19)


Отже, характеристичне рівняння прийме вид
Маємо
 , ,
Або
 . .
Характеристичними числами для крапки  для системи (2.15) будуть для системи (2.15) будуть
 . .
Коріння - комплексні й залежать від параметра d. Виходить, якщо d<0, то крапка - стійкий фокус, якщо d>0, то крапка  - нестійкий фокус. Досліджуємо крапку - нестійкий фокус. Досліджуємо крапку
 . .
Згідно (2.19) складемо характеристичне рівняння в крапці
 . .
Маємо
 . .

Характеристичними числами для крапки системи (2.15) будуть  , ,  . Коріння . Коріння  - дійсні й різні знаки не залежно від параметра d. Отже, крапка - сідло. - дійсні й різні знаки не залежно від параметра d. Отже, крапка - сідло.
3. Досліджуємо крапку  . .
По (2.19) складемо характеристичне рівняння в крапці .
Одержимо
 . .
Вирішуючи рівняння, одержимо
 , ,
тобто
 , ,
Коріння - дійсні й одного знака, що залежать від параметра d. Якщо d<o, то крапка - нестійкий вузол, якщо d>0, то крапка - стійкий вузол. Досліджуємо нескінченно - вилучену частину площини поза кінцями осі oy перетворенням [7] - нестійкий вузол, якщо d>0, то крапка - стійкий вузол. Досліджуємо нескінченно - вилучену частину площини поза кінцями осі oy перетворенням [7]  Це перетворення систему (2.15) переводить у систему: Це перетворення систему (2.15) переводить у систему:
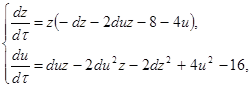 (2.20) (2.20)
де .
Вивчимо нескінченно - вилучені крапки на осі u, тобто при z=0. Одержуємо


Отже 
Отже, маємо дві крапки N1 (0,2) і N2 (0,-2).
Досліджуємо характер цих крапок звичайним способом. Складемо характеристичне рівняння в крапці N1 (0,2).

 (2.21) (2.21)
 . .
Отже
 , ,  , , 
Скористаємося паралельним переносом
 
і підставимо z, u у систему (2.20). Одержимо нову систему:
 (2.22) (2.22)
Складемо характеристичне рівняння в крапці N2 (0,-2)
Характеристичними числами для крапки N2 (0,-2), будуть  , ,  - складний стан рівноваги. Для визначення характеру стану рівноваги скористаємося теоремою [2, с. 196-198]. Теорема 2.1 Нехай крапка (0,0) - ізольований стан рівноваги системи: - складний стан рівноваги. Для визначення характеру стану рівноваги скористаємося теоремою [2, с. 196-198]. Теорема 2.1 Нехай крапка (0,0) - ізольований стан рівноваги системи:
 (2.23) (2.23)
де  , , є поліноми від x,y починаючи із другого ступеня, є поліноми від x,y починаючи із другого ступеня,  - рішення рівняння - рішення рівняння  , а розкладання функції , а розкладання функції  має вигляд: має вигляд:
Тоді
1) при m - непарному й  m>0 крапка (0,0) - є топологічний вузол; m>0 крапка (0,0) - є топологічний вузол;
при m - непарному й  m<0 крапка (0,0) - є топологічне сідло; m<0 крапка (0,0) - є топологічне сідло;
при m - парному крапка (0,0) є сідло - вузол, тобто такий стан рівноваги, канонічна околиця якого складається з двох гіперболічних секторів. При цьому:
якщо  m<0, то усередині гіперболічних секторів укладений відрізок позитивної півосі OX, що примикає до крапки (0,0); m<0, то усередині гіперболічних секторів укладений відрізок позитивної півосі OX, що примикає до крапки (0,0);
якщо  m>0, то відрізок негативної півосі OX. m>0, то відрізок негативної півосі OX.
Щоб скористатися теоремою, необхідно систему (2.22) привести до виду:
Це можна зробити, скориставшись одним з наступних перетворень [2, с. 199-201]:
якщо  , , 
якщо  , ,  , , 
якщо  , ,  , , 
де a, b, c, d - коефіцієнти системи (2.23).
Тоді для системи (2.22) візьмемо наступне перетворення:
Одержимо
Тоді
 (2.24) (2.24)
Знайдемо рішення рівняння:

у вигляді ряду по ступенях Z1:


  , ,  
Отже
Тоді

Підставляючи U1 у систему (2.24) одержимо:
Звідси
 , ,  >0. >0.
Отже, по теоремі 2.1 одержуємо, що крапка N2 (0,-2) - сідло - вузол.
Досліджуємо кінці осі y за допомогою перетворення [7]  . Це перетворення переводить систему (2.15) у систему: . Це перетворення переводить систему (2.15) у систему:
 (2.25) (2.25)
де  . .
Для дослідження станів рівноваги на кінцях осі y, нам необхідно досліджувати тільки крапку N3 (0,0). Складемо характеристичне рівняння в крапці N3 (0,0)
Відповідно характеристичними числами будуть 
Коріння  - дійсні й одного знака. Отже, крапка N3 (0,0) - стійкий вузол. - дійсні й одного знака. Отже, крапка N3 (0,0) - стійкий вузол.
Тепер дамо розподіл станів рівноваги системи (2.1) у вигляді таблиці 3.
Таблиця 3.
| d
|

|

|

|
∞
|
| N1
|
N2
|
N3
|
| (-∞; 0)
|
вуст. фокус
|
сідло
|
невуст. вузол
|
сідло
|
сідло-вузол
|
вуст. вузол
|
| (0; +∞)
|
невуст. фокус
|
сідло
|
вуст. вузол
|
сідло
|
сідло-вузол
|
вуст. вузол
|
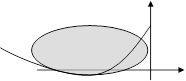
Положення кривих (2.16), (2.17) і розташування щодо їхніх станів рівноваги при d (0 і d (0 дається відповідно мал.3 (а, б).
Поводження траєкторій системи в цілому при d (0 і d (0 дається мал.6 (а, б) додатка В: Поводження траєкторій системи (2.15).
Питання існування граничних циклів залишається відкритим.
а (d (0)
б (d (0)
Мал.3
У даній дипломній роботі побудована квадратична двовимірна стаціонарна система за умови, що приватним інтегралом є крива четвертого порядку, що розпадається на дві криві другого порядку, одна й з яких парабола, друга окружність або гіпербола. При цьому коефіцієнти кривих виражаються через довільний параметр системи.
1. Баутин Н.Н. Про число граничних циклів, що з'являються при зміні коефіцієнтів зі стану рівноваги типу фокуса або центра. - К., 1998
2. Баутин Н.Н., Леонтович Е.А. Методи й прийоми якісного дослідження динамічних систем на площині. - К., 2004
3. Бендиксон І. Про криві, обумовлених диференціальними рівняннями. - К., 2006
4. Биркгоф Дж.Д. Динамічні системи. - К., 2003
5. Воробйов А.П. До питання про цикли навколо особою крапки типу “вузол". - К., 2002
6. Еругин Н.П. Побудова всього множини систем диференціальних рівнянь, що мають задану інтегральну криву. - К., 2003
7. Пуанкаре А. Про криві, обумовлених диференціальними рівняннями. - К., 2004
8. Серебрякова Н.Н. Якісне дослідження однієї системи диференціальних рівнянь теорії коливань. - К., 2005
9. Филипцов В.Ф. До питання алгебраїчних інтегралів однієї системи диференціальних рівнянь. - К., 2003
10. Черкас Л.А. Про алгебраїчні рішення рівняння  , де P і Q - багаточлени другого ступеня. - К., 2000 , де P і Q - багаточлени другого ступеня. - К., 2000
11. Яблонський А.І. Алгебраїчні інтеграли однієї системи диференціальних рівнянь. - К., 2000
Додаток А
Поводження траєкторій системи (2.1)

а) (d<0)

б) (d>0)
Мал.4
Додаток Б
Поводження траєкторій системи (2.8)

а) (d<0)

б) (d>0)
Мал.5
Додаток В
Поводження траєкторій системи (2.15)

а) (d<0)

б) (d>0)
Мал.6
|
