Министерство образования Российской Федерации
Южно-Российский государственный технический университет
Пояснительная записка
к курсовому работе по дисциплине
“Теория машин и механизмов”
г. Волгодонск 2011 г.
Содержание
Задание на курсовой проект
1. Структурный анализ
2. Динамический анализ
3. Синтез кулачкового механизма
4. Построение картины зацепления
Литература
Задание на курсовой проект
Нефтяной насос
Таблица 1
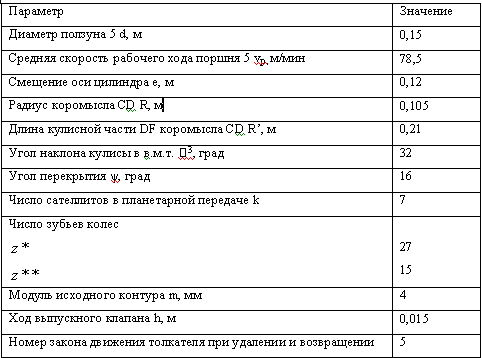
1. Структурный анализ
1.1 Данный механизм предназначен для преобразования вращательного движения звена 1 в поступательное движение ползуна 5.
1.2. Общее число звеньев К=6;
число подвижных звеньев n=K-1=6-1=5;
число кинематических пар IV класса р4
=0;
число кинематических пар V класса р5
=7.
Тогда W=3n-2p5
-p4
=3 5 – 2 7 – 0=1.
При этом условии движение механизма определяется заданием одного параметра, например, угла поворота звена 1.
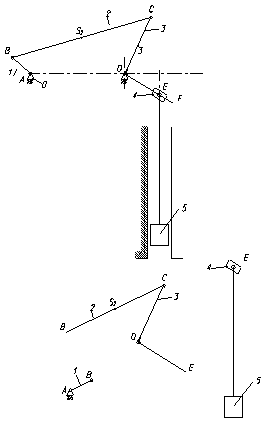
Рис 2.
Данные о кинематических парах сведем в таблицу 1.
Таблица 1
| Пары |
Звенья |
Класс пары |
Тип пары |
| 1 |
1-0 |
V |
Вращательная |
| 2 |
1-2 |
V |
Вращательная |
| 3 |
2-3 |
V |
Вращательная |
| 4 |
3-0 |
V |
Вращательная |
| 5 |
3-4 |
V |
Поступательная |
| 6 |
4-5 |
V |
Вращательная |
| 7 |
5-0 |
V |
Поступательная |
1.3. Выделим структурные группы и определим класс механизма.
1).Ползун 5 – ползун 4– группа II – го класса 4 порядка;
2). Кривошип 3 –шатун 2 – группа II – го класса 2 порядка;
3). Стойка 0 –кривошип 1 – начальный механизм;
Таким образом, данный механизм образован последовательным присоединением к начальному механизму двух групп, состоящих из звеньев 2, 3 и 4, 5. Механизм относится к механизмам II – го класса.
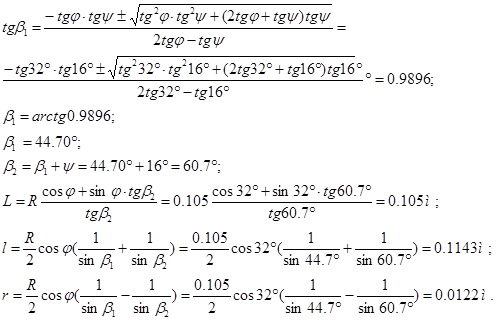
1.4. Определение геометрических параметров звеньев механизма.
2. Динамический анализ
2.1. Построение схемы механизма и плана скоростей.
Вычерчиваем схему механизма в данном (четвертом) положении.
Масштаб построения μl
=0,001 м/мм.
Определим угловую скорость кривошипа:
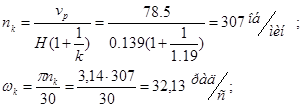
Скорость точки B: vв
=ωк
r=32,13•0,0122=0,39 м/с.
Строим план скоростей.
Масштаб построения плана скоростей:
VB
=wk
×lab
=32.13∙0,0122=0.39 м/с;
Из полученного плана скоростей определяем скорости точек и остальные скорости:
VCD
=(PV
c)μV
=52,68∙0,0065=0,34 м/с;
VCB
=(bc)μV
=28,70∙0,0065=0,18 м/с;



2.2. Построение плана ускорений.
Масштаб построения:

Для определения ускорения т.D составим систему:

Из плана ускорений получаем:


Для определения ускорения т.E4
составим такую же систему уравнений и решим её графически.

2.3. Динамический анализ механизма методом планов сил.
Реклама

Определим силы действующие на механизм:
G=mg; Fu
=ma;
G2
=m2
∙g=3.43∙9,81=33.64 H;
G3
=m3
∙g=3.15∙9,81=30.90 H;
G’
3
=m’
3
∙g=6.3∙9,81=61.80 H;
G5
=m5
∙g=2.84∙9,81=27.86 H;
Fu2
=m2
∙aS2
= m2
∙ (Pa
S2
) ∙Ma
=3.43∙77.75∙0.084=22.39 H;
Fu3
=m3
∙aS3
= m3
∙ (Pa
S3
) ∙Ma
=3.15∙2.88∙0.084=0.76 H;
F’
u3
=m’
3
∙aS3
= m’
3
∙ (Pa
S’
3
) ∙Ma
=6.3∙5.75∙0.084=3.04 H;
Fu5
=m5
∙aS5
= m5
∙ (Pa
S5
) ∙Ma
=2.84∙3.76∙0.084=0.90 H;
Определим силу F, действующую со стороны заготовки, по диаграмме изменения давления на ползуне:



Также на звенья 2, 3 действуют моменты инерции 





Вычерчиваем отдельно каждую группу Ассура и строим для них планы сил.
Рассмотрим группу Ассура состоящую из звеньев 4 и 5.
На неё действуют силы F, G5
, FИ5
, F05
, F3-4
. При этом две последние силы неизвестны.
Находим эти силы из плана сил с масштабом построения
F3-4
=66,88∙100=6688 H;
F05
=27,32∙100=2732 H;
Рассмотрим группу Ассура состоящую из звеньев 2 и 3.
На неё действуют силы FИ3
, G3
, F’
И3
, G’
3
, MИ3
,FИ2
, G2
, MИ2
, F4-3
,F0-3
, F1-2
. При этом силы F0-3
, F1-2
неизвестны. Силу Fτ
0-3
находим из суммы
 
Силу Fτ
1-2
находим из суммы
  
Строим план сил:
 
Силу F 03
и F12
находим из плана сил с масштабом построения: 03
и F12
находим из плана сил с масштабом построения:
F0-3
=347,03∙50=17351,5 H;
F1-2
=239,52∙50=11976 H;
Рассмотрим начальный механизм состоящий из звеньев 0 и 1.
На него действуют силы F2-1
, Fур
.
Составим сумму моментов относительно т. O:
 

2.4 Определим уравновешивающую силу с помощью рычага Жуковского.
Строим план скоростей, повернутый на 90 градусов по направлению вращения кривошипа 1.
На него переносим все внешние силы, действующие на механизм.
При этом моменты сил раскладываем на две составляющие:
Составляем сумму моментов относительно т.PV
:


Вычисляем уравновешивающую силу и сравниваем с ранее полученной.


3. Синтез кулачкового механизма
Исходные данные:
ход толкателя h=0,015 м;
угол давления θ=30˚.
Фазовые углы 

На фазе удаления и фазе возврата закон 5.
Для синтеза кулачкового механизма строим диаграмму зависимости 
Находим экстремальные значения точек графиков:
На фазе удаления и возврата:
Масштабы построения диаграмм:


rmin
=OB∙MS
=32.39∙0.0005=0.016м;
Реклама

эксцентриситет e=8,16∙0,0005=0,004 м;
Тогда радиус ролика rр
=0,0072 м.
Строим кулачковый механизм.
4. Построение картины зацепления двух колес
Исходные данные: z1
=z*=27, z2
=z**=15, m=4 мм.
4.1. Расчет корригированного неравномерного зацепления.
4.1.1. Определяем шаг по делительной окружности 
4.1.2. Определяем радиальный зазори 
4.1.3. Подсчитываем коэффициенты сдвига инструментальной рейки

4.1.4. Подсчитываем радиусы делительных окружностей
4.1.5. Определяем радиусы основных окружностей

4.1.6. Определяем угол зацепления


4.1.7. Подсчитываем радиусы начальных окружностей
4.1.8. Определяем межосевое расстояние

4.1.9. Определяем радиусы окружностей впадин

4.1.10. Подсчитываем коэффициент уравнительного смещения

4.1.11. Определяем радиусы окружностей вершин

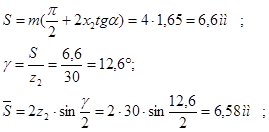
4.1.12. Подсчитываем толщины зубьев по дугам делительных окружностей

4.1.13. Определяем коэффициент перекрытия

4.2. Синтез планетарных редукторов.
Исходные данные: u1
H
=3
число сателлитов в планетарной передаче k=7;
модуль колес m=4.
Принимаем z1
=24 определяем z3
: 
Число зубьев второго колеса:
z2
=(z3
-z1
)/2=(48-24)/2=12;
Принятые числа зубьев удовлетворяют условию отсутствия подрезания и интерференции.
Радиусы колес:
Скорость вращения водила


проверяем полученное графически передаточное число:
4.3 Аналитическое определение параметра зуба шестерни.
4.3.1 Подсчитываем толщину зуба по дуге окружности выступов
Условие соблюдено.
4.3.2 Подсчитываем толщину зуба по дуге делительной окружности
4.3.3 Подсчитываем толщину зуба по дуге основной окружности
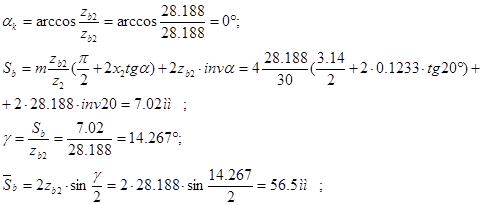
4.3.4 Подсчитываем толщину зуба по дуге произвольной окружности
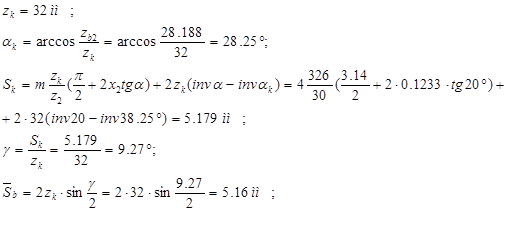
4.3.5 Подсчитываем толщину зуба по дуге произвольной окружности
Список используемой литературы
1. Курс лекций по дисциплине «Теория машин и механизмов».
2. Курсовое проектирование по теории механизмов и механизмов. Учебное пособиедля инж. техн. спец. вузов/ В.К. Акулич, П.П. Анципович, Э.И. Астахов и др.; Под общей ред. Г.Н. Девойно. – Мн.: Высш. шк., 1986. – 285 с.: ил.
3. Проектирование по теории механизмов и машин. Учебное пособие. И.И. Дусев, В.А. Нарыжный. Новочеркасск 1978 г.
|
