| МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОУ ВПО «ЧЕРЕПОВЕЦКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Факультет общих математических и естественнонаучных дисциплин
Кафедра общей физики
ЛАБОРАТОРНАЯ РАБОТА №9
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ВЯЗКОСТИ ЖИДКОСТЕЙ.
выполнил:
студент гр. 5СКб-11
Череповец, 2009/10 уч. год
проверил:
ассис. Герасимов Р.А.
Лабораторная работа № 9
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ВЯЗКОСТИ ЖИДКОСТЕЙ.
Цель работы.
Знакомство с методом Стокса определения вязкостей жидкостей. Определение вязкости глицерина и касторового масла.
Теоретическое введение
В реальных жидкостях при перемещении одних слоев относительно других возникают более или менее значительные силы трения. Со стороны слоя, движущегося более быстро, на слой, движущейся медленнее, действует ускоряющая сила. Наоборот, со стороны слоя, движущегося медленнее, на более быстрый слой действует сила, замедляющая его движение.
Эти силы, называемые силами внутреннего трения, направлены по касательной к поверхности слоев. Свойство жидкости, связанное с наличием сил внутреннего трения, называется вязкостью.
Ньютон эмпирически установил, что силы внутреннего трения между двумя слоями могут быть рассчитаны по формуле:
(1)
где: η - коэффициент вязкости;
- градиент скорости, показывает изменение скорости жидкости в направлении, перпендикулярном к вектору скорости слоев;
DS - площадь соприкосновения слоев.
Коэффициент вязкости зависит от вида жидкости и температуры. В СИ единицей h является Па×с - размерность кг×м-1
×с-1
. Существуют различные экспериментальные методы определения коэффициента вязкости. В данной работе используется метод падающего шарика (метод Стокса).
При определении коэффициента вязкости по методу Стокса наблюдают падение маленького шарика в жидкости. Установка представляет собой стеклянный цилиндр, наполненный исследуемой жидкостью. При движении шарика в жидкости он встречает сопротивление среды. Сопротивление возникает вследствие трения между слоями жидкости, прилежащим к поверхности шарика. Сила внутреннего трения, тормозящая движение шарика, определяется формулой Стокса:
FСТ
= 6p×rhu = 3p×dh (2)
где: r (d) - радиус (диаметр) шарика;
Реклама

h - коэффициент вязкости;
u - скорость движения шарика в жидкости.
Силу внутреннего трения, действующую на падающий в жидкости шарик, можно рассчитать по формуле Стокса, если при движении шарика за ним не образуется вихрей (ламинарное обтекание тела). Этого условия можно достичь, бросая в жидкость маленькие шарики, либо шарики из материала с чуть большей плотностью, чем плотность жидкости.
На шарик при движении в жидкости действуют, кроме силы Стокса еще две силы - сила тяжести и Архимедова сила. Вблизи поверхности жидкости равнодействующая этих трех сил отлична от нуля. В зависимости от того, как попадает шарик в жидкость (шарик падает с некоторой высоты над жидкостью h>0, или опускается с ее поверхности h = 0), его скорость с течением времени меняется.
FR
=P - (FA
+FСТ
) (3)
FR
= f(t)
Можно строго показать, что изменение величины скорости происходит как показано на рис.1, и, по истечении некоторого времени, скорость достигает предельного значения. Предельное значение скорости определяется массой и размерами шарика и вязкостью жидкости.
Теория позволяет оценить расстояние от поверхности жидкости, ниже которого движение шарика будет происходить с постоянной скоростью. На экспериментальной установке это расстояние указано меткой. Установившееся значение скорости может быть вычислено по формуле:
 (4) (4)
где:  - расстояние между метками; - расстояние между метками;
t - время движения шарика между ними.
При равномерном движении шарика после верхней метки, равнодействующая всех сил равна нулю и из (3) имеем:
P= FA
+FСТ
(5)
Сила тяжести
(6)
Выталкивающая сила Архимеда
(7)
где: rШ
и rЖ
- плотность материала шарика и жидкости соответственно. Из формул (2), (4) - (7) для расчёта коэффициента вязкости жидкости получим выражение:
 (8) (8)
ПРИБОРЫ И ПРИНАДЛЕЖНОСТИ:
Два цилиндрических сосуда с исследуемыми жидкостями ( глицерин и касторовое масло); термометры; микрометр; шарики (свинцовые или стальные); линейка; секундомер.
МЕТОДИКА ИЗМЕРЕНИЙ
Измерительные приборы и их погрешности:
| Измерительная
физическая
величина
|
Прибор
|
Предел измерений
|
Цена деления
|
Погрешность
|
| D
|
Микрометр
|
25мм
|
0,01мм
|
±0,004мм
|
| t
|
Секундомер механический
|
0,2с
|
±0,2с
|
| h
|
Линейка(сталь)
|
500мм
|
1мм
|
±0,2мм
|
Таблица измерений:
| Род жидкости
|
Температура жидкости
|
Диаметр шарика
|
Время падения
|
| d
|
dср
|
| Касторка
|
23 С
|
1. 3.35мм
2. 3.40мм
3. 3.38мм
|
3.37мм
|
3.9с
|
| 1. .32мм
2. .30мм
3. .34мм
|
3.32мм
|
3.9с
|
| 1. 3.26мм
2. 3.24мм
3. 3.25мм
|
3.25мм
|
3.8с
|
| Глицерин
|
23 С
|
1. 3.33мм
2. 3.38мм
3. 3.36мм
|
3.35мм
|
5с
|
| 1. 3.30мм
Реклама

2. 3.28мм
3. 3.32мм
|
3.30мм
|
5с
|
| 1. 3.26мм
2. 3.25мм
3. 3.25мм
|
3.25мм
|
4.8с
|
Вычисления:
Эксперимент с касторовым маслом
:

ρ
ш
=
7.8∙103
кг\м3
ρ
ж
=0.95∙103
кг\м3
𝓁=18см=0.18м


 0.9175 Па∙с 0.9175 Па∙с
 0.8906 Па∙с 0.8906 Па∙с
 0.8316 Па∙с 0.8316 Па∙с
 =0.8799 Па∙с =0.8799 Па∙с
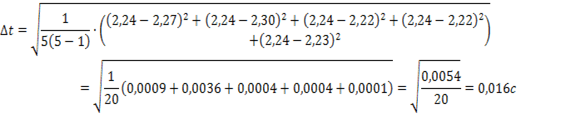
Для вычисления погрешности используем формулу:


∆t = 0.2с


=
0.000015м


Эксперимент с глицерином
:

ρ
ш
=
7.8∙103
кг\м3
ρ
ж
=1.3∙103
кг\м3
𝓁=18см=0.18м

 1.1031 Па∙с 1.1031 Па∙с
 1.0705 Па∙с 1.0705 Па∙с
 0.9967 Па∙с 0.9967 Па∙с
 =1.0567 Па∙с =1.0567 Па∙с
Для вычисления погрешности используем формулу:

∆t = 0.2c

 =0.018м =0.018м


Конечный результат:
У касторового масла вязкость составила:  0.8799 ± 0.0467) Па∙с 0.8799 ± 0.0467) Па∙с
У глицерина вязкость составила:  1.0567 ± 0.0017 ) Па∙с 1.0567 ± 0.0017 ) Па∙с
Вывод: Проведя эксперимент, мы познакомились с методом Стокса для определения вязкостей жидкостей и определили вязкость касторового масла и глицерина. У касторового масла вязкость составила: 0.8799 ± 0.0467) Па∙с, а у глицерина вязкость составила: 1.0567 ± 0.0017) Па∙с.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОУ ВПО «ЧЕРЕПОВЕЦКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Факультет общих математических и естественнонаучных дисциплин
Кафедра общей физики
ЛАБОРАТОРНАЯ РАБОТА №23
Проверка основного закона динамики вращательного движения твердого тела относительно неподвижной оси
выполнил:
студент гр. 5СКб-11
Череповец, 2009/10 уч. Год
проверил:
ассис. Герасимов Р.А.
Введение
Абсолютно твердое тело можно рассматривать как систему материальных точек, расстояние между которыми неизменно.
Абсолютно твердому телу доступны следующие виды движения: поступательное, вращательное и колебательное.
1. Поступательное движение
твердого тела – это такое движение, при котором любая прямая линия, проведенная через какие – нибудь две точки тела, перемещается, оставаясь параллельной самой себе. При этом движении все точки тела совершают одинаковые перемещения, обладают одинаковыми скоростями  и одинаковыми ускорениями а. и одинаковыми ускорениями а.
Основной закон динамики поступательного одномерного движения твердого тела – второй закон Ньютона – записывается так:
 или или 
где  - векторная сумма всех сил, действующих на тело. Ускорение, приобретаемое телом, пропорционально действующей силе и обратно пропорционально массе тела. - векторная сумма всех сил, действующих на тело. Ускорение, приобретаемое телом, пропорционально действующей силе и обратно пропорционально массе тела.
2. Вращательное движение
твердого тела относительно неподвижной оси – это такое движение, при котором в теле имеются по крайней мере две неподвижные точки. Прямую, проходящую через эти точки, называют осью вращения (очевидно, все точки, принадлежащие оси, также неподвижны). Остальные точки тела описывают окружности с центрами на оси.
Вращательное движение характеризуется угловым перемещением тела  , угловой скоростью , угловой скоростью  и угловым ускорением и угловым ускорением  . .
При рассмотрении вращения твердого тела с динамической точки зрения наряду с понятием массы вводится понятие момента инерции, а наряду с понятием силы – понятие момента силы.
Из статики известно, что вызвать вращательное движение тела может только сила определенным образом направленная. Сила, направление которой проходит через ось вращения или параллельно ей, не может вызвать вращение вокруг этой оси. Изменение скорости вращательного движения твердого тела, имеющего закрепленную ось (рис.1) вызывается лишь составляющей - силы - силы  . Составляющие . Составляющие  - параллельная оси и - параллельная оси и  - перпендикулярная оси вращательного движения не вызывают и не изменяют. Сила - перпендикулярная оси вращательного движения не вызывают и не изменяют. Сила  - тангенциальная составляющая силы - тангенциальная составляющая силы  . На рис. перпендикулярна плоскости чертежа. При этом угловое ускорение зависит не только от величины этой составляющей силы, но и от кратчайшего расстояния r = 00’ от оси вращения до линии, вдоль которой действует тангенциальная составляющая, т. е. от так называемого плеча силы
. Поэтому в динамики для характеристики возникновения и изменения вращательного движения вместо сил рассматривают момент силы. . На рис. перпендикулярна плоскости чертежа. При этом угловое ускорение зависит не только от величины этой составляющей силы, но и от кратчайшего расстояния r = 00’ от оси вращения до линии, вдоль которой действует тангенциальная составляющая, т. е. от так называемого плеча силы
. Поэтому в динамики для характеристики возникновения и изменения вращательного движения вместо сил рассматривают момент силы.

Моментом силы
относительно оси вращения называется физическая величина, определяемая через векторное произведение радиуса вектора  и проекции силы на плоскость вращения и проекции силы на плоскость вращения

 - радиус вектор направлен от оси в точку приложения силы. - радиус вектор направлен от оси в точку приложения силы.
Вектор момента силы направлен вдоль оси вращения и может определяться по правилу буравчика (см. рис. 1). Модуль вектора момента силы можно записать в виде

Угловое ускорение вращающегося тела зависит не только от массы вращающегося тела, но и от распределения массы относительно оси вращения. Поэтому в динамике вращательного движения вместо массы рассматривают момент инерции тела относительно оси вращения.
Момент инерции
тела массы m достаточно малого объёма (тело можно считать материальной точкой) относительно оси проходящей вне тела, равен произведению его массы на квадрат расстояния до оси вращения:

Поскольку твердое тело представляет систему материальных точек, то сумма моментов инерции всех материальных точек тела относительно оси вращения есть момент инерции тела
относительно этой оси:

Зависимость углового ускорения вращающегося тела от момента силы и момента инерции тела относительно оси, вокруг которой происходит вращение, определяется основным законом динамики вращательного движения:
 или или 
где  векторная сумма всех моментов сил действующих на твердое тело. векторная сумма всех моментов сил действующих на твердое тело.
Теория метода и экспериментальная установка.
Задачей данной лабораторной работы является экспериментальная проверка основного закона динамики вращательного движения твердого тела относительно неподвижной оси.
В работе можно экспериментально определить величины углового ускорения ε, момента сил М при фиксированных значениях момента инерции вращающейся системы установки.
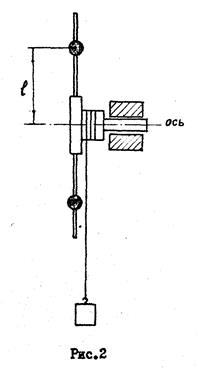
Установка представляет собой крестообразный маятник Обербека (рис.2). Изменяя положение грузов на спицах уменьшают или увеличивают момент инерции вращающейся системы. Существенно понимать, что момент инерции системы расчитать очень сложно. Момент инерции может быть вычислен, если известны величины ε и М.
Величины ε и М в работе могут быть изменены подвешиванием к нити установки различных грузов. Численные значения углового ускорения ε и момента сил М определяются независимо.
При проверке основного закона динамики вращательного движения к нити подвешивают грузы различной массы m1
, m2
, m3
… mi
. Это позволяет определить два набора величин
ε1
ε2
ε3
… εi
М1
М2
М3
… Мi
Если данные получены при неизменном моменте инерции установки  , то будет иметь место равенство отношений , то будет иметь место равенство отношений
  (1) (1)
Совпадение указанных отношений и свидетельствует о справедливости основного закона динамики вращательного движения твердого тела с неподвижной осью.
О справедливости закона также можно судить, если данные  представить графически. Зависимость представить графически. Зависимость  от М на графике должна быть прямолинейной, причем по углу наклона к кривой можно судить о величине момента инерции. от М на графике должна быть прямолинейной, причем по углу наклона к кривой можно судить о величине момента инерции.
а) Определение углового ускорения
.
Угловое ускорение ε, с которым вращается крестообразный маятник может быть найдено по известному линейному ускорению, с которым опускается груз на нити. Линейное ускорение находят, измеряя время t, в течение которого груз массы m из состояния покоя опускается на расстояние h. Ускорение движения груза находится из выражения:
 (2)
(2)
Так как нить сматывается без скольжения, то линейное тангенциальное ускорение  точек канавки шкива, на котором намотана нить будет также равно точек канавки шкива, на котором намотана нить будет также равно  . Если радиус шкива R, то угловое ускорение ε шкива, а следовательно и крестовины найдется из выражения: . Если радиус шкива R, то угловое ускорение ε шкива, а следовательно и крестовины найдется из выражения:
 (3) (3)
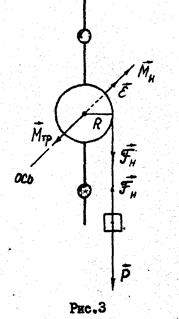
б) Определение момента сил 
Для нахождения момента сил рассмотрим еще раз схему установки где расставлены действующие в системе силы и моменты сил. Момент сил М задающий угловое ускорение, как видно из рисунка, определяется выражением (рис.3)
 (4) (4)
где  - момент силы натяжения - момент силы натяжения
 - момент сил трения в оси. - момент сил трения в оси.
Момент силы натяжения
может быть подсчитан по формуле

Сила натяжения легко находиться, если воспользоваться вторым законом Ньютона для поступательного движения груза:
и тогда для момента силы натяжения будем иметь
 (5) (5)
Нахождение момента сил трения представляет большую сложность, по сравнению с нахождением момента сил натяжения . В общем случае момент сил трения зависит от силы давления на ось груза, подвешенного к нити и других причин. Однако, если момент сил трения меняется не очень сильно, что справедливо в условиях данного эксперимента, то его нахождение упрощается.
1. Момент сил трения  , считая его постоянным, можно определить следующим образом. Если при , считая его постоянным, можно определить следующим образом. Если при  записать закон вращательного движения для двух значений вращающих моментов записать закон вращательного движения для двух значений вращающих моментов
 
и решить эту систему относительно  будем иметь будем иметь
 (6а) (6а)
1. Значение момента сил трения можно оценить приблизительно. С этой целью к нити, намотанной на шкив, подвешивают различные грузы и находят среди них такой m0
, который еще не вызывает вращения системы. Но если его массу увеличить на малую величину, то он вызовет вращение. Тогда
 (6б) (6б)
2. Момент сил трения можно определить также графически. Формулу (4) можно преобразовать к виду
Если момент сил трения и момент инерции остаются постоянными, то эта зависимость является линейной. На графике  , точка пересечения линии с осью абсцисс и будет характеризовать значение момента сил трения. , точка пересечения линии с осью абсцисс и будет характеризовать значение момента сил трения.
Уменьшить относительную роль момента сил трения в опыте можно увеличивая массу груза m. Но при возрастании массы груза происходит возрастание давления на ось вращающейся системы и увеличение сил трения (и момента сил трения). Кроме того, увеличение массы груза m уменьшает время его падения и тем самым снижает точность его измерения.
в) Измерения
.
1. Первоначально задают какое – либо неизменное значение для момента инерции вращающейся системы. С этой целью необходимо закрепить грузы на спицах в определенном положении – симметрично относительно оси вращения. Заданное положение грузов отметить в лабораторном журнале.
2. Для заданного значения момента инерции вращающейся системы определить время, за которое груз на нити проходит расстояние h между двумя метками – первый и второй выключатели секундомера. Изменение времени повторить не менее трех раз для последующего усреднения.
3. Указанное измерение времени повторить еще не менее, чем для трех грузов из имеющихся в наборе принадлежностей к работе.
4. Изменив значение момента инерции вращающейся части системы повторить все операции отмеченные в пунктах 1 – 3.
Данные об установке и экспериментальные результаты удобно представить в виде таблицы.
Измерительные приборы и их погрешности:
| Измерительная
физическая
величина
|
Прибор
|
Предел измерений
|
Цена деления
|
Погрешность
|
| D
|
Штангель-цыркуль
|
300мм
|
0,1мм
|
±0,1мм
|
| t
|
Секундомер электронный
|
0,01с
|
±0,01с
|
| h
|
Линейка(сталь)
|
500мм
|
1мм
|
±0,2мм
|
Экспериментальные результаты:
Эксперимент с первым кольцом:
| №
эксп.
|
Длинна
Маятника
(
𝓁
)м
|
Диаметр
Кольца
(
D
к
)м
|
Диаметр
Ролика
(
Dp
)м
|
Диаметр
Оси
(
Do
)м
|
Масса
кольца
(
mk
)кг
|
Масса
ролика
(
mp
)кг
|
Масса
оси
(
mo
)кг
|
Время
(
t
)с
|
| 1
|
0,41
|
0,105
|
0,085
|
0,01
|
0,262
|
0,162
|
0,033
|
2,27
|
| 2
|
0,41
|
0,105
|
0,085
|
0,01
|
0,262
|
0,162
|
0,033
|
2,30
|
| 3
|
0,41
|
0,105
|
0,085
|
0,01
|
0,262
|
0,162
|
0,033
|
2,22
|
| 4
|
0,41
|
0,105
|
0,085
|
0,01
|
0,262
|
0,162
|
0,033
|
2,22
|
| 5
|
0,41
|
0,105
|
0,085
|
0,01
|
0,262
|
0,162
|
0,033
|
2,23
|
Вычисления:


mобщ
=mк
+mр
+mо
mобщ
=0,262+0,162+0,033=0,457кг




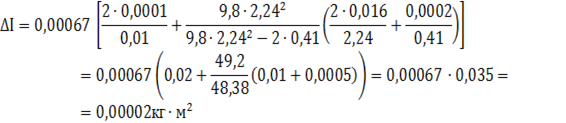
Для вычисления погрешности используем формулу:

∆D=0,0001м
∆h=0,0002м

Эксперимент со вторым кольцом:
| №
эксп.
|
Длинна
маятника
(𝓁)м
|
Диаметр
Кольца
(Dк
)м
|
Диаметр
Ролика
(Dp
)м
|
Диаметр
Оси
(Do
)м
|
Масса
кольца
(mk
)кг
|
Масса
ролика
(mp
)кг
|
Масса
оси
(mo
)кг
|
Время
(t)с
|
| 1
|
0,41
|
0,105
|
0,085
|
0,01
|
0,387
|
0,162
|
0,033
|
2,36
|
| 2
|
0,41
|
0,105
|
0,085
|
0,01
|
0,387
|
0,162
|
0,033
|
2,41
|
| 3
|
0,41
|
0,105
|
0,085
|
0,01
|
0,387
|
0,162
|
0,033
|
2,39
|
| 4
|
0,41
|
0,105
|
0,085
|
0,01
|
0,387
|
0,162
|
0,033
|
2,34
|
| 5
|
0,41
|
0,105
|
0,085
|
0,01
|
0,387
|
0,162
|
0,033
|
2,35
|
Вычисления:


mобщ
=mк
+mр
+mо
mобщ
=0,387+0,162+0,033=0,582кг




Для вычисления погрешности используем формулу:

∆D=0,0001м
∆h=0,0002м


Конечный результат:
Для 1-го кольца  ± ± 
 
Для 2-го кольца  ± ± 
 = 0,00103 = 0,00103
Вывод: Проведя эксперимент, мы рассмотрели сложное движение тел, сочетающего вращательное движение с поступательным и рассчитали моменты инерции маятника Максвелла двумя способами: экспериментально и теоретически.
|
