Федеральное агентство по образованию РФ
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра промышленной электроники (ПрЭ)
ИЗМЕРИТЕЛЬ СКОРОСТИ ПОТОКА ЖИДКОСТИ
2009
Содержание
Введение
1 Анализ технического задания
2 Разработка структурной схемы устройства
3 Выбор элементной базы
4 Расчёт и выбор элементов электрической принципиальной схемы устройства
5 Оценка погрешности измерения
Заключение
Список литературы
Введение
В данном курсовом проекте решается задача синтеза, то есть проектирования электронного устройства заданного функционального назначения и расчёта параметров элементов выбранной схемы, удовлетворяющие заданным требованиям технического задания.
Процесс проектирования всегда связан с выбором оптимального варианта из нескольких возможных, то есть устройство должно быть как можно меньших размеров, обеспечивать высокую точность, минимальные затраты на его производство. Анализ электронных схем показывает, что построить измерительные устройства, одновременно удовлетворяющие требованиям минимума массы и габаритных размеров, высокого качества и быстродействия измерения при высоких энергетических показателях, невозможно из-за ограничений, присущих используемым методом.
Данное устройство рассчитано на высокую точность (порядка 2%), лёгкость в понимании работы и настройки измерительного устройства.
1. Анализ технического задания
Целью анализа технического задания является, прежде всего, определение его некоторых моментов, без которых невозможно осуществить дальнейшее проектирование. При анализе данного технического задания следует выбрать объект измерения.
Точность измерения минимальной скорости потока в абсолютных единицах составляет:

Исходя из измеряемого диапазона, определим минимальную и максимальную частоту замыканий датчика и соответствующие этим частотам интервалы времени:

При определении частоты замыканий и размыканий датчика за определённый период времени заданная точность измерения не будет достигнута. Поэтому в качестве объекта измерения необходимо выбрать интервал между замыканиями контактов, и затем этот интервал будет преобразован в скорость потока жидкости с выводом показаний на индикаторы.
2. Разработка структурной схемы устройства
Структурная схема измерителя скорости потока жидкости, основанная на анализе технического задания, изображение на рис. 3.1
Реклама


Рис. 3.1 Структурная схема измерителя скорости потока жидкости.
Схема основана на измерении числа импульсов с генератора опорной частоты (ГОЧ) за 3 срабатывания датчика скорости с помощью двоичного счётчика импульсов СТ2, и дальнейшем их усреднении и преобразовании среднего значения в код индикации с помощью преобразователя (X/Y) и выдачи на устройство индикации отбор 3‑х импульсов датчик скорости (ДС) осуществляется с помощью двоичного счётчика СТ1 и элементов «И-НЕ» и «И». После прохождения 3‑х импульсов СТ1 элемент «И» запирается и импульсы ДС не поступают. В схеме должен быть предусмотрен генератор тактовых импульсов (ГТИ) с периодом импульсов Тгти=2 мин. и временем импульса tимп=10 мкс., необходимым для сброса счётчиков. При этом после каждого импульса счётчики сбрасываются, замер происходит за время не более  , а остальное время до 2‑х минут новые показания высвечиваются на устройстве индикации. Для проведения поверки в схеме предусмотрен ключ (К) и поверочный генератор импульсов Gобр. При нажатии ключа вход устройства переключается с датчика скорости на выход поверочного генератора Gобр. Примем, что частота импульсов поверочного генератора должна быть рассчитана таким образом, чтобы за 3 его импульса на индикаторах появилось число «888.88». , а остальное время до 2‑х минут новые показания высвечиваются на устройстве индикации. Для проведения поверки в схеме предусмотрен ключ (К) и поверочный генератор импульсов Gобр. При нажатии ключа вход устройства переключается с датчика скорости на выход поверочного генератора Gобр. Примем, что частота импульсов поверочного генератора должна быть рассчитана таким образом, чтобы за 3 его импульса на индикаторах появилось число «888.88».
Временные диаграммы, поясняющие работу устройства, приведены на рис. 3.2:

3. Выбор элементной базы
После выбора и обоснования структурной схемы заданного электронного устройства необходимо сделать выбор элементной базы. В первую очередь необходимо решить о типе элементной базы, наиболее подходящем для проектируемого электронного устройства.
1) Только ИМС (интегральные микросхемы);
2) Только ДЭ (дискретные элементы);
3) ИМС и ДЭ (смешанный тип элементной базы);
Наиболее подходящим для проектирования заданного измерителя является первый тип «только ИМС».Практически же устройство, построенное на ИМС, всегда имеют некоторое количество дискретных элементов, которые выполняют вспомогательные функции.
Далее необходимо составить перечень критериев в приоритетном порядке для выбора, как дискретных элементов, так и микросхем. Критерии и их приоритеты определяются, в первую очередь, условиями технического задания, а также другими задачами, решаемыми при проектировании электронных устройств или иного направления. Так, например, при проектировании устройств измерительной электроники решаются задачи увеличения точности показаний устройства, уменьшения его погрешности, массы, габаритов, стоимости.
Реклама

Исходя из выше изложенного, составим перечень критериев в приоритетном порядке для выбора интегральных микросхем:
1) Минимальное энергопотребление;
2) Минимальные габариты;
3) Минимальная масса;
4) Минимальная стоимость;
Наименьшим потреблением мощности обладают микросхемы КМОП серий, поэтому при проектировании измерителя будем опираться на микросхемы именно этой серии, рассчитанных на напряжение питания 9 В. Выбор ИМС будет осуществлён при непосредственном расчёте электрической принципиальной схемы.
Составим перечень критериев в приоритетном порядке для выбора дискретных элементов:
1) Минимальные габариты корпуса;
2) Минимальная масса;
3) Минимальная цена;
Выбор дискретных элементов также будет осуществлён при непосредственном расчёте электрической принципиальной схемы устройства.
4. Расчёт и выбор элементов электрической принципиальной схемы устройства
Устройство индикации.
Для индикации показаний скорости потока жидкости используем семисегментные индикаторы типа АЛС324А с типовой схемой включения [2]. Индикатор имеет следующие параметры:
Номинальный ток свечения Iсв.ном.=10мА; Прямое падение напряжения на светодиоде при номинальном токе свечения ΔUсд=2В.
Для преобразования 4‑разрядного двоично-десятичного кода цифры в код индикации используем специализированные дешифраторы типа К561ИД4 с типовой схемой включения [3]. Для зажигания запятой в сегменте HG3 требуется подключить через токоограничивающий резистор Rсв к напряжению источника питания Uп=9В.
Определим сопротивление и мощность этого резистора:
По спр [4] выбираем резистор типа С2–23–0.125–680 Ом ±5%
Выбор счётчика опорных импульсов.
Для обеспечения заданной точности измерения период импульсов ГОЧ должен быть равен:

Исходя из величины  определим минимальные и максимальные число импульсов, поступающих на счётчик за один цикл измерения: определим минимальные и максимальные число импульсов, поступающих на счётчик за один цикл измерения:
Определим разрядность счётчика импульсов ГОЧ:

14‑разрядный двоичный счётчик импульсов реализуем на основе каскадного включения микросхем типа К561ИЕ10 [3]. Одна микросхема содержит в себе два 4‑разрядных асинхронных счётчика. Для реализации 14‑разрядного двоичного счётчика потребуется две микросхемы.
Преобразователь кода.
В качестве преобразователя выходного кода счётчика в двоично-десятичный 5‑тетрадный код скорости потока жидкости используем постоянное запоминающее устройство (ПЗУ), запрограммировав его соответствующим образом. Разрядность входной адресной шины этого ПЗУ должна быть не ниже:

по разрядности счётчика импульсов ГОЧ, а разрядность шины выходных данных должна быть не ниже:

(по числу тетрад двоично-десятичного кода).
В качестве ПЗУ используем параллельное включение двух микросхем типа КР587РП1 с типовой схемой включения [3]. Эта микросхема является ПЗУ на основе программируемой логической матрицы (ПЛМ) с 14‑разрядной выходной шиной данных и с двумя адресными шинами 14‑разрядной и 4‑разрядной. Направление потока информации задаётся соответствующими управляющими сигналами.
Выбор счётчика импульсов датчика скорости.
Для счёта импульсов датчика скорости достаточно использование 2‑разрядного счётчика импульсов. Поэтому в качестве счётчика импульсов датчика скорости используем микросхему типа К561ИЕ10 [3]. Микросхема является 4‑разрядным счётчиком.
Расчёт генератора опорной частоты.
Как было вычислено выше, период импульсов ГОЧ должен быть равен  и для достижения заданной точности показаний также иметь не ниже заданной точности, поэтому генератор опорной частоты должен быть с кварцевой стабилизацией. Схема ГОЧ с кварцевой стабилизацией частоты изображена на рис. 5.5.1 [5]. и для достижения заданной точности показаний также иметь не ниже заданной точности, поэтому генератор опорной частоты должен быть с кварцевой стабилизацией. Схема ГОЧ с кварцевой стабилизацией частоты изображена на рис. 5.5.1 [5].
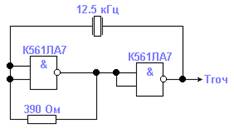
Рис. 5.5.1 Схема ГОЧ с кварцевой стабилизацией частоты.
Период выходных импульсов ГОЧ определяется только частотой кварцевого генератора. Определим необходимую частоту кварцевого генератора:

Выбираем кварцевый резонатор типа РК‑169МА‑14БП‑12.5кГц-В [6].
В качестве элементов «И-НЕ» для ГОЧ используем микросхему типа К561ЛА7.
Расчёт и выбор элементов генератора тактовых импульсов.
Генератор тактовых импульсов (ГТИ) должен генерировать последовательность тактовых импульсов с периодом  и временем импульса и временем импульса  . Схему такого ГТИ спроектируем на основе генератора с кварцевой стабилизацией и делителя частоты. Функциональная схема такого ГТИ изображена на рис. 5.6.1: . Схему такого ГТИ спроектируем на основе генератора с кварцевой стабилизацией и делителя частоты. Функциональная схема такого ГТИ изображена на рис. 5.6.1:

Рис. 5.6.1 Функциональная схема ГТИ.
В качестве элементов «И-НЕ» для генератора с кварцевой стабилизацией частоты используем выше выбранную микросхему типа К561ЛА7. Определим выходную частоту генератора с кварцевой стабилизацией и частоту кварцевого резонатора:
Выбираем кварцевый резонатор типа РК‑169МЛ‑14БП‑100кГц-В [6].
Определим коэффициент деления делителя частоты:

Делитель частоты с данным коэффициентом деления спроектируем на основе последовательного включения двух микросхем программируемых счётчиков типа К561ИЕ15 [3].

Таблица 5.6.1. Программируемый счётчик

Таблица 5.6.2. Выбор входов и коэффициента деления счётчика
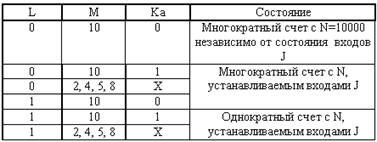
Таблица 5.6.3. Рабочие состояния счётчика ИС К564ИЕ15.
Микросхема представляет собой программируемый счётчик-делитель с коэффициентом деления №3…21327 с дискретом, равным единицы.
Счётчик может работать в двух режимах деления и однократного счёта. Режим деления представляет собой режим, когда на выходе образуются импульсы с частотой fвх/N и длительностью, соответствующей периоду поступающей частоты fвх. Режим однократного счёта представляет собой режим, когда после поступления на вход запрограммированных N импульсов на выходе микросхемы появляется сигнал высокого уровня, не меняющийся с приходом последующих тактовых импульсов.
Микросхема состоит из четырёх счётных секций: основной считывающей, состоящей из подсекции модуля и остатка и подсекции тысяч, секции единиц, секции десятков и секции сотен. Каждая секция представляет собой четырёхразрядный счётчик с предварительной установкой, работающей на вычитание.
Работа микросхемы описывается следующим выражением:
 (5.6.1) (5.6.1)
Где N‑коэффициент деления, М-модуль устанавливаемый по входам Ka, Kb, Kc; P1‑множитель тысяч, устанавливается входами J1‑J4; P2, P3, P4 – множители сотен, десятков, единиц, каждый устанавливается соответствующей четвёркой входов J13‑J16, J9‑J12, J5‑J8; P5‑остаток, устанавливаемый входами J1‑J4.
Модуль М предназначен для быстрого ступенчатого изменения частоты в 10; 12,5; 20; 25; и 50 раз и может принимать значения соответственно 2, 4, 5, 8, 10. Числа Р1‑Р4 могут быть представлены как в десятичной, так и в шестнадцатеричной системе счисления. При задании этих чисел десятичным кодом наибольший коэффициент деления N=15999. Для ввода в микросхему числа Р1‑Р5 должны быть представлены в двоичном коде. Микросхему можно представить как два последовательных вычитающих счётчика. Первый счётчик (подсекция модуля и остатка) осуществляет деление на М, второй делит импульсы частоты fвх/M на число, равное выражению в скобках.
С началом счёта в подсекцию модуля и остатка вводится число, равное модулю, и в ходе счёта на выходе подсекции возникают импульсы с частотой fвх/M, пока не окончится счёт вторым счётчиком, что имеет место, когда текущее число станет равным 1. В это время происходит перезапись исходного числа N во все разряды счётчика, после чего начинается новый цикл счёта.
Для установки микросхемы в исходное состояние необходим режим предварительной установки Kb=Kc=0 не менее трёх полных периодов тактовой частоты.
Коэффициент деления делителя частоты  при последовательном включении выбранных микросхем определится из соотношения при последовательном включении выбранных микросхем определится из соотношения  , где , где  и и  – коэффициенты деления частоты для первой и второй последовательно включенных микросхем, определяемые соотношением: – коэффициенты деления частоты для первой и второй последовательно включенных микросхем, определяемые соотношением:
Примем  тогда тогда 
Распишем коэффициенты  . Из выражения 5.6.3 для получения необходимых величин и : . Из выражения 5.6.3 для получения необходимых величин и :
М1=5; р1.1=2; р2.1=0; р3.1=0; р4.1=0; р5.1=0;
М2=2; р1.2=0; р2.2=3; р3.2=0; р4.2=0; р5.2=0;
Исходя из полученных коэффициентов согласно таблицам 5.6.2 и 5.6.3, определим состояния установочных входов для обеих микросхем:

Для создания уровня логического нуля вывод микросхемы необходимо соединить с общей шиной, а для создания уровня логической единицы вывод микросхемы следует подключить к источнику питания через резистор сопротивлением 10 кОм.
Выбор датчика скорости потока жидкости.
В качестве датчика скорости потока жидкости, удовлетворяющему техническому заданию, используем датчик объёмного расхода жидкости турбинный типа ДОРТ‑3 [7]. Схематическая конструкция датчика изображена на рис. 5.7.1:

Рис. 5.7.1 Схематическая конструкция датчика
Он состоит из трубы из немагнитного материала, по которой протекает жидкость. В трубе расположена на оси турбинка с несколькими магнитными лопастями, а с наружи трубы располагаются герконовые контакты. При прохождении магнитной лопасти рядом с герконом контакт замыкается. Таким образом, чем больше скорость потока жидкости, тем больше частота вращения турбинки, и тем больше частота замыканий герконовых контактов.
Расчёт поверочного устройства.
Для переключения устройства в режим поверки используем ключ. Поверочный индикатор тактовых импульсов (Gобр) должен быть рассчитан таким образом, чтобы в режиме «поверка» на индикаторах отображалось показание «888.88». Примем, что ПЗУ будет запрограммирован таким образом, что заданное число будет высвечиваться при числе импульсов Nобр=51. Исходя из этого определим период генерации импульсов образцового генератора:

Поверочный генератор импульсов с точной выдержкой спроектируем на основе интегрального таймера типа КР1006ВИ1 [5].
Одна из распространенных схем автоколебательного мультивибратора приведена на рис. 5.8.1
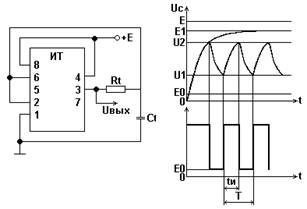
Рис. 5.8.1 Автоколебательный мультивибратор.
До включения источника питания Е конденсатор был разряжен. После включения источника в первый момент конденсатор остаётся разряженным, и напряжение на нём, а следовательно, и на соединённых между собой контактах 2 и 6 интегрального таймера равно 0. При этом напряжение на контакте на контакте 2 (нулевое) оказывается меньше порогового уровня U1, компаратор DA2 включается, вырабатывая выходной сигнал, воздействующий на вход R триггера. На выходе триггера устанавливается сигнал логического нуля, на выходном контакте 3 интегрального таймера – сигнал логической 1, то есть с уровнем Е1. Выходное напряжение +Е1 начинает заряжать конденсатор Сt через резистор Rt с постоянной времени τ=RtCt (предполагается что выходное сопротивление инвертора DD1 существенно меньше Rt). Когда напряжение на С1 перейдёт пороговый уровень U1, компаратор DA2 выключится. Однако RS‑триггер останется в том же положении, так как сигнал на его установочный вход S ещё не поступил. Заряд конденсатора продолжается. Когда напряжение на конденсаторе Ct, а следовательно, и на контакте 6 таймера превысит уровень U2, включается компаратор DA1 и выходной сигнал с него поступает на вход S триггера и переключает его в состояние логической 1 на выходе. На контакте 3 интегрального таймера устанавливается логический 0 (E0). Конденсатор Ct начинает разряжаться через резистор Rt от напряжения U2 к уровню E0. Когда напряжение снизиться до U1, произойдёт очередное переключение выходного напряжения.
Графики напряжения на конденсаторе Ct и выходном контакте 3 интегрального таймера показаны на рис. 5.8.1
Считая, что длительность выходного импульса соответствует сигналу логической единицы на контакте 3, определим длительность выходного импульса. Учитывая экспоненциальный характер изменения напряжения на конденсаторе Ct при его зарядке, не сложно получить выражение:
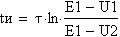
Промежуток времени между выходными импульсами:
Для точной оценки периода колебаний используется выражение:

Времязадающий конденсатор выберем типа К10–170–25В‑0.047мкФ[4].
Из выражения 5.8.3 определим величину сопротивления времязадающего резистора:

В качестве времязадающего резистора выбираем подстроечный многообратный резистор с разрешающей способностью δR=0.1% типа СП5–2ВА‑0.5–24кОм±10% [4].
Выбор других логических микросхем
В качестве логических элементов «И» рис. 3.1 используем микросхему типа К561ЛА7 с последовательным включением элементов.
Для соединения измерителя с датчиком скоростью и питающем напряжением используем разъём типа ГРПМ[4].
5. Оценка погрешности измерения
Заданная точность измерения обеспечивается разрядностью счётчика импульсов. Поскольку генератор опорных импульсов спроектирован с использованием кварцевого резонатора, то погрешность измерения не превысит заданной точности.
Заключение
Разработанное устройство (измеритель скорости потока жидкости), предназначенное для контроля расхода жидкости в закрытых и открытых системах её циркуляции, позволяет измерять скорость потока жидкости в пределах от 1 до 100 м/с.
В целях обеспечения точности, надёжности работы устройства и его простоты, большинство узлов выполнено в интегральном исполнении. При этом суммарная погрешность измерения не превышает 2%.
Список литературы
1) В.А. Скворцов, А.В. Топор, Электронные цепи и микро – схемотехника. Часть II: Методические указания к курсовому пректу. – Томск ТУСУР, 2007. – 31 с.
2) Б.Л. Лисицын. Отечественные приборы индикации и их зарубежные аналоги: Справочник. – М.: Радио и связь, 1993–432 с.
3) Б.В. Тарабрин, Л.Ф. Лунин, Ю.Н. Смирнов и др. – М.: Радио и связь, 1983. – 528 с.
4) Н.Н. Акимов, Е.П. Ващуков, В.А. Прохоренко, Ю.П. Ходорёнок – Резисторы, конденсаторы, трансформаторы, дроссели, коммутационные устройства РЭА Мн.: Беларусь, 1994–591 с.
5) В.М. Герасимов, В.А. Скворцов. Электронные цепи и микросхемотехника. Краткий курс лекций для студентов специальности «Промышленная электроника». – Томск: ТУСУР, 1998–176 с.
6) Г.И. Пухальский, Т.Я. Новосельцева. Проектирование цифровых устройств на интегральных микросхемах: Справочник. – М.: Радио и связь, 1990–304 с.
7) В.Э. Низэ, И.В. Антика. Справочник по средствам автоматики. – М.: 1983–504 с.
|
