Федеральное агентство по образованию
ГОУ ВПО Российский государственный профессионально-педагогический университет
Машиностроительный институт
Кафедра автоматизации, механизации производства и методики обучения
РЕФЕРАТ
по дисциплине «Транспортные и складские системы»
на тему «Транспортное оборудование гибких производственных систем»
Екатеринбург 2009
Содержание
Введение
Транспортная система в структуре ГПС
Транспортное оборудование в ГПС
Заключение
Список использованных источников
Введение
Создание материально-технической базы невозможно без наличия постоянно развивающегося опережающими темпами машиностроения на основе передовых мировых достижений науки и техники. Основой такого машиностроения является всесторонняя комплексная автоматизация процессов от идеи создания до производства и поставки готовой продукции, анализа ее использования с целью постоянного улучшения качества и обновления.
Правильно сбалансированные с учетом технико-экономических факторов системы способны решить задачи по повышению производительности труда, снижению потребления ресурсов, повышению качества продукции.
Научно-технический прогноз развития промышленного производства показывает, что именно гибкие производственные системы (ГПС) наилучшим образом удовлетворяют требованиям заказчика, решают проблемы конкурентоспособности продукции на мировом рынке, обеспечивают высокую рентабельность производства и его эффективность. Эти системы позволяют избежать затоваривания ненужной продукцией и эффективного расходования всех видов ресурсов. Этот тип производства может работать по прогрессивному принципу «делай вовремя», так как поставки заготовок, деталей и т. д. осуществляются строго и в определенное время.
Проектирование таких систем требует глубокого понимания целей их создания, содержания задач и принципов эффективного использования, а также очень важно определиться с основными методологическими позициями. Поэтому немаловажную роль играет в данной системе транспортное оборудование, задачей которого является беспрерывная работа системы.
1. Транспортная система в структуре ГПС
ГПС представляет собой систему с комплексно автоматизированным производственным процессом, работа всех компонентов которой (технологического оборудования, транспортных средств, средств контроля и инструментообеспечения и др.) координируется как единое целое системой управления, обеспечивающей быстрое изменение программ функционирования технических средств системы при смене объекта производства.
Реклама

Транспортная система состоит из транспортных и накопительных устройств, осуществляющих межоперационное хранение и доставку заготовок, приспособлений, готовых деталей к основному технологическому оборудованию и автоматическому складу.
2. Транспортное оборудование в ГПС
Транспортное оборудование осуществляет получение, комплектацию и перемещение всех необходимых компонентов для выполнения в ГПС технологических процессов.
Автоматизация всех этих операций осуществляется взаимосвязанными системами манипулирования, транспортирования и накопления.
Объекты манипулирования, транспортирования и накопления в ГПС:
- материалы;
- заготовки;
- полуфабрикаты;
- готовые изделия;
- комплектующие элементы;
- инструменты;
- станочная оснастка;
- отходы производства.
Перемещение изделий в ГПС осуществляется транспортными средствами, классификация которых приведена на рисунке 1.

Рисунок 1. Классификация транспортных систем
При транспортировании изделий с помощью конвейерных линий изделия закрепляются на паллетах, которые опорными поверхностями устанавливаются на подвижных лентах конвейера (рис. 2.).

Рисунок 2. Схема устройства транспортирования палет на конвейере:
1- изделие; 2 - паллета; 3 - бесконечные ленты конвейера; 4 - несущие профили с полостью возврата ленты; 5 - выдвижной упор для остановки спутника; 6 - носитель кода.
Каждая паллета идентифицируется с помощью носителя кода кодов (бесконтактного датчика), что позволяет контролировать текущее местоположение каждого изделия в ГПС и осуществлять управление всей транспортной системой.
Гибкая конвейерная система представляет из себя систему конвейеров, расположенных между гибкими производственными модулями (ГПМ) ГПС так, что каждое изделие в ГПС может быть доставлено из любой ее точки к любому ГПМ. Такая система выполнена по модульному принципу и включает следующие основные модули:
- конвейерные ленты;
- модули подъема и поперечного сдвига.
В качестве примера на рисунке 3. приведена схема компоновки гибкой конвейерной системы фирмы BOSH.
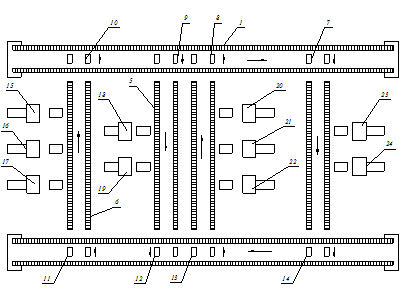
Рисунок 3. Схема компоновки гибкой конвейерной линии:
1-6 – конвейерные модули; 7-14 – модули подъема и поперечного сдвига; 15-24 – гибкие производственные модули
Реклама

Конвейерные ленты оснащены приводами, перемещающими их с постоянной скоростью в одном направлении. Модули подъема и поперечного сдвига имеют трехпозиционный пневматический привод подъема и короткий участок ленточного транспортера. В нижнем положении этого модуля паллета свободно над ним проходит, а в верхнем положении паллета останавливается и переносится на участок соответствующего поперечного ленточного транспортера или на позицию загрузки соответствующего ГПМ.
В качестве средств транспортирования в ГПС наибольшее распространение получили самоходные транспортные тележки, которые часто называют транспортными роботами или роботрайлерами.
Транспортный робот - это программно-управляемая тележка со средствами загрузки и разгрузки транспортируемых изделий, автоматически перемещающаяся по программе управления в пределах участка, цеха, завода.
Простейшие транспортные роботы перемещаются по направляющим (рельсам), а подвод питания может осуществляться по гибким кабелям, от скользящих токопроводов, от автономных источников питания (аккумуляторов). Очевидно, что рельсовые тележки обладают недостаточной гибкостью перемещений по различным траекториям в пределах ГПС в связи со сложностью технических систем изменения направления перемещения.
Поэтому в настоящее время наибольшее распространение получили безрельсовые транспортные роботы (рис.4.), обеспечивающие наибольшую гибкость функционирования в ГПС.
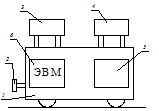
Рисунок 4. Схема транспортного робота:
1 - тележка (шасси); 2 - бампер системы торможения; 3-4 - грузовые платформы с приводом перегрузки изделий и направляющими; 5 – аккумулятор; 6-бортовая ЭВМ.
С помощью бортовой ЭВМ осуществляется управление транспортным роботом. Команды по маршруту следования вводятся в память бортовой ЭВМ по каналу связи с управляющим вычислительным комплексом ГПС. Аккумуляторы необходимы для питания используемых приводов и электрических устройств.
Автоматическое управление перемещением транспортным роботом требует наведения его на требуемую траекторию перемещения. Используются четыре основных способа наведения безрельсовых транспортных роботов на траекторию:
- оптический;
- индукционный;
- радионаведения.
При оптическом способе наведения управление осуществляется по белой линии (полосе), нанесенной на полу цеха. Для этого на тележке имеется устройство, освещающее белую линию, а приемное устройство (фотоэлемент), установленное на тележке, осуществляет прием отраженного сигнала, по характеру которого осуществляется автоматическое управление перемещением тележки.
При индукционном способе наведения на тележке устанавливают индукционные датчики, которые воспринимают низкочастотное магнитное поле, возбуждаемое током, проходящим по кабелю, уложенному в полу цеха. Сигналы этих датчиков используются для управления.
При использовании способа радионаведения вдоль траектории перемещения тележки располагают передающую антенну, а приемная антенна располагается на тележке.
Как показал опыт использования транспортных роботов, наиболее эффективным является оптический способ наведения.
Одной из важнейших задач управления тележкой является позиционирование тележки в позициях перегрузки изделий. Для этого используются следующие способы управления электроприводами тележки:
- замкнутый по положению привод с контролем на всем пути перемещения;
- разомкнутый привод со ступенчатым регулированием скорости;
- комбинированный привод: разомкнутый между заданными для остановки позициями и замкнутый по положению вблизи позиций остановки;
- использование разомкнутого привода с механизмом уточнения положения и фиксации.
Способ замкнутого по положению привода с контролем на всем пути перемещения универсален, так как можно осуществить точное позиционирование транспортного робота в любой точке. Однако такой привод сложен, требует высокой точности и жесткости направляющих элементов тележки и имеет высокую стоимость.
При использовании разомкнутого привода со ступенчатым регулированием скорости остановка транспортного робота осуществляется подачей последовательных команд на торможение. Этот способ не позволяет осуществить достаточно высокую точность позиционирования (менее 5мм).
Комбинированным является привод, разомкнутый между заданными для остановки позициями и замкнутый по положению вблизи позиций остановки. Этот привод сочетает достоинства первых двух рассмотренных способов. Датчики положения включаются только вблизи позиции остановки, что позволяет не предъявлять больших требований к точности и жесткости направляющих элементов тележки и в то же самое время обеспечивает высокую точность позиционирования.
При использовании разомкнутого привода с механизмом уточнения положения и фиксации применяются специальные устройства (ловители), которые обеспечивают высокую точность позиционирования платформы с изделиями (рис .5.).
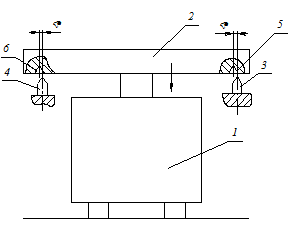
Рисунок 5. Транспортный робот с механизмом уточнения положения и фиксации:
1- тележка; 2 – платформа; 3-4 – ловители; 5-6 - конические отверстия; ∆ - погрешность позиционирования.
Заключение
На основании опыта эксплуатации действующих в настоящее время гибких производственных систем можно отметить следующие основные их достоинства:
- повышение производительности в 2-10 раз;
- удовлетворение спроса рынка в короткие сроки;
- уменьшение времени освоения изделий в 5-10 раз;
- уменьшение оборотных средств и повышение оборота капитала;
- уменьшение численности обслуживающего персонала в 5-10 раз;
- значительное увеличение загрузки оборудования (работа в 3 смены);
- уменьшение заделов;
- повышение стабильности изготовления и качества изделий;
- уменьшение занимаемых производственных площадей.
Необходимо отметить и основные недостатки таких систем:
- высокая сложность технических систем, что требует высокой надежности всех их элементов, приводит к высокой стоимости систем, требует высокой квалификации работающих;
- сложность изготовления деталей высокой точности (6-7 квалитетов точности).
Поэтому в настоящее время ведутся интенсивные работы по следующим основным направлениям в области гибких производств:
- повышение надежности всех технических систем ГАП;
- оптимальное управление (моделирование процессов изготовления, позволяющее создавать математическое и программное обеспечение для оптимальной работы ГАП);
- контроль качества изделий;
- техническая диагностика систем и элементов ГАП (оборудования, инструментов и др.);
- подготовка высококвалифицированного персонала.
В настоящее время в промышленно-развитых странах созданы и успешно развиваются фирмы, специализирующиеся на разработке гибких производств, их обслуживании и подготовки персонала для их эксплуатации.
Список использованных источников
1. Вороненко, В.П. Проектирование производственных систем в машиностроении: Учеб. пособие / В.П. Вороненко, Ю.М. Соломенцев, А.Г. Схиртладзе, А.И. Пульбере. – Тирасполь: РИО ПГУ, 2001. – 349 с.
2. Соломенцев, Ю.М. Управление гибкими производственными системами / Ю.М. Соломенцев, В.Л. Сосонкин. – М.: Машиностроение, 1988. – 350 с.
3. Митрофанов, С.П. Технологическая подготовка гибких производственных систем / С.П. Митрофанов, Д.Д. Куликов, О.Н. Миляев, Б.С. Падун; Под ред. С.П. Митрофанова. – М.: Машиностроение, 1987. – 352 с.
|
