|
Федеральное Агентство по Образованию
Государственное образовательное учреждение
Высшего профессионального образования
Тульский Государственный Университет
Кафедра "ПТМиО"
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К КУРСОВОМУ ПРОЕКТУ
По дисциплине "Машины непрерывного транспорта
"
Выполнил студент:
Принял:
Тула 2008 г.
Содержание
Введение
1. Определение скорости движения тягового органа конвейера
2. Выбор тележки и тягового элемента
3. Определение погонной нагрузки
4. Тяговый расчет конвейера по контуру
5. Расчет тягового усилия и мощности привода
6. Проверка прочности тягового органа и расчет механизма натяжения
Список использованной литературы
Тележечный грузонесущий конвейер состоит из замкнутого контура тяговой цепи с постоянно прикрепленными к ним тележками (платформами), движущимися по направляющим путям; на тележках располагаются транспортируемые грузы-изделия; тележки и направляющие пути являются непосредственными составными частями конвейера. В этом состоит принципиальное отличие грузонесущих тележечных конвейеров от напольных грузоведущих конвейеров.
Тележечные грузонесущие конвейеры предназначены для перемещения грузов по отдельным технологическим операциям поточного производственного процесса. Их применяют для транспортирования изделий от одного рабочего места к другому в процессе сборки, для перемещения литейных форм в процессе сборки, заливки, охлаждения, выбивки, возврата пустых опок в литейном цехе, для межоперационной передачи изделий от одного рабочего места к другому в процессе изготовления, а также для выполнения ряда других операций подобного назначения. Широкое разнообразие использования тележечных конвейеров обусловило большое число их конструктивных разновидностей.
Основными признаками классификации тележечных конвейеров являются расположение тягового элемента и направляющих путей и положение тележек на ветвях конвейера. По первому признаку различают конвейеры вертикально замкнутые и горизонтально замкнутые; последние могут быть расположены как в одной горизонтальной плоскости, так и в пространстве. По положению тележек на обратной ветви различают конвейеры с опрокидывающимися и неопрокидывающимися тележками. Горизонтально замкнутые конвейеры бывают с напольным и настольным перемещением тележек. По характеру перемещения изделий известны конвейеры с непрерывным и пульсирующим движением тележек.
Реклама

Выбор того или иного типа конвейера зависит от характера технологического процесса, обслуживаемого конвейером, характеристики перемещаемого груза и планировки производственного помещения.
В горизонтально замкнутых конвейерах используются обе ветви, но для их размещения требуется значительная производственная площадь. На конвейерах этого типа грузы могут совершать круговые движения без съема с тележек, что позволяет рационально использовать конвейер при сравнительно меньшей длине помещения для длительных производственных процессов, а также как подвижный склад.
Выбор типа конвейера зависит также от характеристики груза. Для перемещения в процессе сборки сравнительно тяжелых и громоздких изделий применяют, как правило, вертикально замкнутые, а для легких малогабаритных - горизонтально замкнутые конвейеры. Технологические конвейеры с длительными и различными по времени операциями делают, как правило, горизонтально замкнутыми с одноплоскостной и пространственной трассами.
При непрерывном движении конвейера его производительность определяется по формуле:
 , ,
где υ - скорость движения конвейера, м/мин;
z - число изделий на платформе;
tT
- шаг тележек, м;
kн
- коэффициент неравномерности загрузки конвейера
(kн
= 1,15-1,20 - при автоматической загрузке;
kн
= 1,2-1,25 - при ручной загрузке)
Таким образом, необходимая скорость движения конвейера при заданной производительности
 м/мин м/мин
Принимаем шаг тележки tT
= 1600мм. Загрузка конвейера автоматическая.
Исходя из возможной реорганизации технологического процесса диапазон регулирования скорости принимаем υ = 2,36; 4,75; 9,6 м/мин.
Размеры платформы тележки выбирают по габаритным размерам и массе перемещаемых грузов и принимают на 100-150мм больше габаритных размеров опок. Исходя из габаритов груза l x b x h = 1200x500x700 по ГОСТ 5938 -73 выбираем тележку для транспортирования литейных форм:
b х l = 650х1250мм;
tT
= 1600мм; (шаг тележек)
GТ
= 320кг; (масса тележки)
R = 1600мм; (максимальный радиус поворота ходовой части)
В качестве тягового органа принимаем разборную цепь М224 по ГОСТ 588-81: t = 630мм; (шаг цепи)
qц
= 16,6кг; (масса 1м цепи)
Sразр
= 220кгс/м; (разрушающая нагрузка)
При отношении  тяговый орган принимается двухцепным. тяговый орган принимается двухцепным.
Реклама

 < 4, < 4,
следовательно тяговый орган - одноцепный.
Нагрузка на 1м от ходовой части конвейера:
 ; ;
Нагрузка на загруженной части:
 , ,
где G - масса груза.
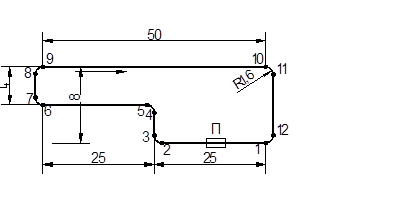
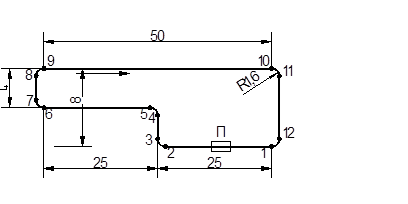
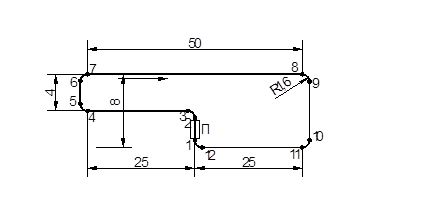
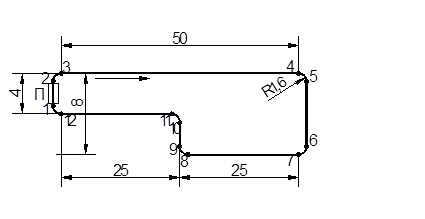
Тяговый расчет включает определение сопротивлений на отдельных участках, натяжения гибкого органа в характерных точках трассы и расчет тягового усилия.
В ходе тягового расчета определим рациональное месторасположение привода. Критерием правильного выбора места расположения привода является достижение наименьшего натяжения тягового органа. Поэтому тяговый расчет будем производить по нескольким схемам расположения привода.
СХЕМА 1.
Минимальное натяжение Smin
в точке 1 принимается равным 1,5 - 2,5 кН.
Обходом по контуру, последовательно суммируя сопротивления на участках, определяем натяжения в остальных точках.
Коэффициент сопротивления движению ходовой части конвейера вычислим по формуле:
 , ,
где f - коэффициент сопротивления движению в подшипниках ходовых роликов;
d - диаметр цапфы подшипника;
μ - коэффициент сопротивления качению;
D - диаметр ходового ролика;
с - коэффициент увеличения сопротивления от трения реборд колес или торцев колес о направляющие.
При роликах на подшипниках качения среднее значение ω = 0,02.
Натяжения в характерных точках контура тягового органа определяется следующим образом:
В точке 1… S1
= Smin
;
В точке 2… S2
= S1
+W1-2
;
В точке 3… S3
= S2
еωα
; (на криволинейном участке)
………………………..
В i-ой точке… Si
= Si-1
+W (i-1) - i
.
α - угол охвата тяговым органом криволинейной направляющей (α=90°).
 - сила сопротивления движению на прямолинейном участке; - сила сопротивления движению на прямолинейном участке;
l - длина прямолинейного участка.
Определяем натяжения в характерных точках тягового органа:
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
Натяжение тягового органа в точке 12 вычисляется при условии, если все тележки загружены.
 кН. кН.
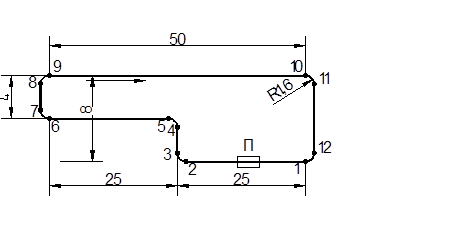
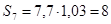
СХЕМА 2.
Определяем натяжения в характерных точках тягового органа:
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
Натяжение тягового органа в точке 12 вычисляется при условии, если все тележки загружены.
 кН. кН.
СХЕМА 3.
Определяем натяжения в характерных точках тягового органа:
кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
Натяжение тягового органа в точке 12 вычисляется при условии, если все тележки загружены.
 кН. кН.
СХЕМА 4.
Определяем натяжения в характерных точках тягового органа:
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
Натяжение тягового органа в точке 12 вычисляется при условии, если все тележки загружены.
 кН. кН.
СХЕМА 5.
Определяем натяжения в характерных точках тягового органа:
кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
Натяжение тягового органа в точке 12 вычисляется при условии, если все тележки загружены.
 кН. кН.
СХЕМА 6.
Определяем натяжения в характерных точках тягового органа:
 кН; кН;
кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
 кН; кН;
Натяжение тягового органа в точке 12 вычисляется при условии, если все тележки загружены.
 кН. кН.
Общее тяговое усилие при промежуточном расположении привода:
W0
= S12
= 22,8кН
Потребная мощность двигателя:
 , ,
где υ - скорость движения тягового органа, м/с;
η - КПД привода (0,85).
 кВт кВт
Принимаем электродвигатель МТКН 512-8 со следующими параметрами:
N = 5 кВт; n = 380 об/мин; Мmax
= 1470 Нм; J = 1,425кгм2
.
Прочность цепи оценивается коэффициентом запаса прочности:
 , ,
где i - число тяговых цепей;
λ - коэффициент распределения нагрузки между цепями в двухцепном тяговом органе;
 < 8, < 8,
поэтому в качестве тягового органа примем пластинчатую цепь М1800 по ГОСТ 588-81 (Sразр
= 1800кН; t = 630мм):
 >8. >8.
В этом случае прочность цепи удовлетворяется.
Натяжное устройство устанавливается на повороте конвейера на 180˚. На конвейерах с прямоугольной трассой натяжные устройства не устанавливают, так как они получаются громоздкими и сложными. Таким образом, исходя из конструкции конвейера очевидно, что натяжное устройство установить невозможно (нецелесообразно).
1. Иванченко Ф.К., Бондарев В.С. и др. "Расчеты грузоподъемных и транспортирующих машин". Киев 1978г.
2. Пертен Ю.А. "Конвейеры. Справочник". Ленинград. 1984г.
3. Спиваковский А.О. "Транспортирующие машины". Москва. 1983г.
|
