| Міністерство освіти і науки України
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
«ХАРКІВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ»
Факультет XXX Кафедра «Обчислювальна техніка та програмування»
Спеціальність 8.091502 «Системне програмування»
ЗАТВЕРДЖУЮ
Завідувач кафедри ОТП
___________/Xxxxx Ф.А./
«_____» ____________2009р.
ДИПЛОМНА РОБОТА
освітньо-кваліфікаційного рівня магістр
Тема роботи «Розробка, дослідження системи керування на основі нейронної мережі»
затверджена наказом по НТУ «ХПІ» від “ 21 ” жовтня 2009 г. № 2725-III
Шифр роботи XXX23.2725-ІІІ.
Виконавець
Керівник
Харків 2009
РЕФЕРАТ
Звіт з дипломної роботи: 141с., 45 рис., 19 табл., 61 джерело.
Об’єкт дослідження – система керування на основі нейронної мережі.
Мета роботи – розробка та моделювання роботи системи керування на основі нейронної мережі, що відповідає сучасним вимогам до систем керування нелінійними об’єктами..
Система керування є важливою частиною електроприводу асинхронного тягового двигуна дизель-потягу. Запропонована структура системи керування на основі нейронної мережі дозволяє вирішити ряд задач оптимізації функціонування електроприводу, які складно вирішити за допомогою застосування інших систем керування.
У роботі проведене моделювання досліджуваних об’єктів засобами пакету Matlab, приведені результати дозволяють оцінити як основні параметри та характеристики системи керування, так і роботу даного об’єкту в цілому, зробити висновки про доцільність використання запропонованої архітектури.
У даному напрямку потребуються подальші дослідження з метою оптимізації функціонування.
Ключові слова: тяговий асинхронний двигун, система керування, система автоматичного регулювання, регулятор, модель, нейрорегулятор, перерегулювання, моделювання.
ПЕРЕЛІК ПОЗНАЧЕНЬ ТА СКОРОЧЕНЬ
П – регулятор – пропорційний регулятор
ПІ- регулятор – пропорційно-інтегральний регулятор
ПІД-регулятор – пропорційно-інтегрально-диференційний регулятор
САК – система автоматичного керування
САР – система автоматичного регулювання
СГ – синхронний генератор
СК – система керування
ТАД – тяговий асинхронний двигун
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ «ХПІ»
Факультет XXX Кафедра «Обчислювальна техніка та програмування»
Спеціальність 8.091502 «Системне програмування»
Реклама

ЗАТВЕРДЖУЮ
Завідувач кафедри ОТП
___________/Xxxxx Ф.А./
«_____» ____________2009р.
ЗАВДАННЯ
на виконання дипломної роботи
освітньо-кваліфікаційного рівня магістр
студентці
1 Тема роботи «Розробка, дослідження системи керування на основі нейронної мережі»
2 Зміст завдання Аналіз методів та критеріїв якості; розробка моделей об’єкта керування в середовищі Matlab; розробка системи керування електроприводу з використанням методів нечіткої логіки та нейроконтролерів; розробка регуляторів системи керування з використанням нейронних мереж. Дослідження систем керування.
3 Вихідні дані для виконання роботи Структурна схема електропередачі дизель-потяга; математичні моделі електроприводу та системи регулювання; параметри регуляторів системи керування; пакет моделювання «Matlab»;_величина перерегулювання не більше 25%, час перерегулювання – не більше 20с; число перерегулювань - 4.
4 Скласти звіт і виконати необхідні документи (конструкторські, технологічні, програмні, плакати) відповідно до плану виконання дипломної роботи.
План виконання дипломної роботи
| Етап. Найменування
|
Термін
виконання
|
Прізвище
консультанта
|
| Огляд джерел
|
14-28.02.09
|
М.Й.Xxxxx
|
| Аналіз методів розробки систем
|
| керування електроприводом дизель-
|
| потягу
|
1-5.03.09
|
М.Й.Xxxxx
|
| Розробка моделі системи керування
|
| електропередачі дизель-потягу
|
6-15.03.09
|
М.Й.Xxxxx
|
| Розробка системи керування за
|
| допомогою методів нечіткої логіки та
|
| нейронних мереж для оптимізації
|
| динамічних процесів електропривода
|
15-25.03.09
|
М.Й.Xxxxx
|
| Дослідження систем керування
|
| дизель-потяга
|
25.03-5.04.09
|
М.Й.Xxxxx
|
| Економічна оцінка й обґрунтування
|
5-9.04.09
|
І.М.Xxxxx
|
| Охорона праці та навколишнього
|
| середовища
|
9-12.04.09
|
xxx
|
| Цивільна оборона
|
13.04.09
|
Рxxxxx
|
| Оформлення документів дипломної
|
| роботи
|
14-22.04.09
|
М.Й.Xxxxx
|
| Оформлення звіту
|
14-19.04.09
|
М.Й.Xxxxx
|
| Оформлення плакатів
|
19-22.04.09
|
М.Й.Xxxxx
|
| Оформлення науково-дослідної
|
| роботи магістра
|
22-24.04.09
|
О.Ф.Даниленко
|
Керівник роботи ________________ М.Й.Xxxxx
Студент-дипломник _________________ Д.О.Xxxxx
«___» ______________ 2009 р.
| Найменування виробу,
об’єкту або теми
|
Найменування
документу
|
Формат
|
Кільк.
арк.
|
Приміт-
ка
|
| Документи загальні
|
| Завдання
|
А4
|
1
|
| Звіт
|
А4
|
| Плакати
|
| Структурна схема системи
|
| управління електропередачі
|
| дизель-потягу. Математична
|
| модель регулятора збудження.
|
схема
|
А1
|
1
|
| Структурна схема моделі
|
| регулятора вихідної напруги.
|
| Результати моделювання
|
схема
|
А1
|
1
|
| Вибір функцій приналежності
|
| для нечітких змінних.
|
схема
|
А1
|
1
|
| Результати роботи нечіткого
Реклама

|
| нейрорегулятора із різними
|
| функціями приналежності.
|
схема
|
А1
|
1
|
| Структурна схема моделі із
|
| системою керування з
|
| використанням нейронних
|
| мереж.
|
схема
|
А1
|
1
|
| Структурні схеми для
|
| визначення вагових коефіцієнтів
|
| нейрорегулятора.
|
схема
|
А1
|
1
|
| Генетичний алгоритм (ГА)
|
схема
|
А1
|
1
|
| Результати моделювання роботи
|
| системи керування з
|
| використанням нейронних
|
| мереж.
|
схема
|
А1
|
1
|
| XXXxxxxx. 03078-002ВД
|
| Прізвище
|
Підп
|
Дата
|
| Розроб.
|
Xxxxx
|
«Розробка, дослідження системи керування на основі нейронної мережі»
Відомість документів
|
Літ.
|
Арк..
|
Аркушів
|
| Перев.
|
Xxxxx
|
1
|
1
|
| НТУ «ХПІ»
Кафедра ОТП
|
| Н.контр
|
Xxxxx
|
| Затв.
|
Xxxxx
|
АНОТАЦІЯ
У роботі розглянуто питання побудови систем керування електроприводом дизель-потягу, проведений огляд літератури на задану тематику та аналіз існуючих підходів до розв’язання найпоширеніших задач у даній галузі. Розглянуті як стандартні системи, так і альтернативні варіанти з використанням новітніх технологій, таких як нечітка логіка та нейронні мережі. Побудовані математичні моделі та структурні схеми досліджуваних об’єктів, проведене моделювання їхнього функціонування, проаналізовані отримані характеристики та оцінена робота об’єктів в цілому. Дослідження і моделювання проведене засобами пакету Matlab.
АННОТАЦИЯ
В работе рассмотрены вопросы построения систем управления электроприводом дизель-поезда, проведен обзор литературы на заданную тематику и анализ существующих подходов к решению самых распространенных задач данной отрасли. Рассмотрены как стандартные системы, так и альтернативные варианты с использованием новейших технологий, таких как нечеткая логика и нейронные сети. Построены математические модели и структурные схемы исследуемых объектов, проведено моделирование их функционирования, проанализированы полученные характеристики и оценена работа объектов в целом. Исследование и моделирование проведено средствами пакета Matlab.
ANNOTATION
In this work the questions of building management systems of diesel-train drive are considered, review of literature to givenned themes and analysis existing approaches to decision of most wide-spread problems given to branches are organized. They are considered both standards systems, and alternative variants with use the most latest technologies, such as illegible logic and neuronetworks. They are built mathematical models and structured schemes of under investigation objects, modeling of their operation is organized, got features are analysed and working the objects as a whole is evaluated. The study and modeling is organized the facilities of package Matlab.
ЗМІСТ
Перелік позначень і скорочень
Вступ
1. Аналіз методів розробки систем керування електроприводом дизель-потягу
1.1 Дизель-потяг з тяговим електроприводом змінного струму як об’єкт керування.
1.2 Аналіз методів та критеріїв якості, що використовуються для розробки систем керування об’єктами залізничного транспорту
2. Розробка моделі системи керування електропередачі дизель-потягу
2.1 Моделювання тягових двигунів дизель-потягу
2.2 Моделювання пристроїв САК об’єкта керування.
2.3 Розробка моделі блоку «синхронний генератор-випрямлювач» електропередачі дизель-потягу з використанням нейронних мереж
3. Розробка системи керування за допомогою методів нечіткої логіки та нейронних мереж для оптимізації динамічних процесів електропривода
3.1 Розробка системи керування електроприводом змінного струму з використанням методів нечіткої логіки та нейроконтролерів
3.2 Вибір функцій приналежності нечітких змінних при розробці нечіткого регулятора на основі нейроконтролера в системі керування електроприводом змінного струму
3.3 Розробка регуляторів системи керування електропередачі дизель-потяга з використанням нейронних мереж
3.4 Розробка системи керування дизель-потяга на основі нейромережевих технологій
4. Дослідження систем керування дизель-потяга
4.1 Дослідження регуляторів системи керування, розроблених на основі використання принципу регулювання за помилкою та ПІД закону керування
4.2 Дослідження регуляторів системи керування, розроблених на основі використання методів нечіткої логіки і нейромережевих технологій
5. Економічна оцінка й обґрунтування
5.1. Опис розробленого продукту
5.2 Оцінка ринку збуту
5.3 Конкуренція
5.4 Стратегія маркетингу
5.5 Оцінка ризику та страхування
5.6 Фінансовий план
6. Охорона праці та навколишнього середовища
6.1 Загальні питання
6.1.1 Загальні питання охорони праці
6.1.2 Загальна характеристика виробничого приміщення
6.1.3 Загальна характеристика трудового процесу
6.1.4 Загальна характеристика використовуваного виробничого електроустаткування
6.1.5 Аналіз небезпечних і шкідливих факторів
6.2 Виробнича санітарія
6.2.1 Параметри мікроклімату
6.2.2 Освітлення
6.2.2.1 Природне освітлення
6.2.2.2 Штучне освітлення
6.2.3 Випромінювання від екрана
6.3 Техніка безпеки
6.3.1 Електробезпека
6.3.1.1 Конструктивні міри електробезпеки
6.3.1.2 Схемно-конструктивні міри електробезпеки
6.3.1.3 Схема занулення та призначення елементів занулення
6.3.1.4. Експлуатаційні міри електробезпеки
6.3.2 Ергономічні вимоги до робочого місця
6.4 Пожежна безпека
6.5 Охорона навколишнього середовища
7. Цивільна оборона
Висновки
Перелік використовуваної літератури
ВСТУП
Одним зі стратегічних напрямків державної політики України в області розвитку сучасних видів транспорту є наступне:
- забезпечення задоволення потреб населення України у міських перевезеннях, у перевезеннях на дальні відстані та приміському сполученні;
- залучення до виготовлення сучасних видів рухомого складу вітчизняних виробників, у тому числі науково-технічного та виробничого потенціалу нашої країни;
- створення конкурентно-спроможного рухомого складу, що забезпечить зменшення імпортної залежності України від поставок рухомого складу з країн СНД та Західної Європи. На це вказують ряд Постанов Кабінету міністрів України, розроблено ряд Державних програм, проведена ланка нарад та постанов на рівні керівників підприємств, що займаються створенням сучасних видів рухомого складу. Зокрема, Державною програмою «Розвиток рельсового рухомого складу соціального призначення для залізничного транспорту та міського господарства», що введена у дію Постановою Кабінету Міністрів України №769 від 2 червня 1998р., передбачено на основі використання потужного науково-технічного та виробничого потенціалу України виготовлення сучасних конкурентно-спроможних магістральних вантажних та пасажирських локомотивів, дизель- та електропотягів.
Створення сучасного конкурентно-спроможного рухомого складу немислиме без створення електропередачі з тяговими електроприводами змінного струму та систем керування, що забезпечують функціонування тягових одиниць рухомого складу та його складових компонент оптимальним чином. Електрична передача є однією з важливіших частин дизель-потягу, від подальшого вдосконалення якої в багатьом залежить економічність його функціонування. Застосування безколекторних машин(у даному випадку трифазних асинхронних двигунів) пов’язані в першу чергу з підвищенням потужності тягового рухомого складу. З ростом потужності колекторних електродвигунів та генераторів при їхніх обмежених габаритах знижується надійність роботи колекторно-щіточного вузла, підвищуються експлуатаційні витрати, збільшується трудомісткість роботи по їхньому ремонту та обслуговуванню. Порівняльних аналіз електропередач для тягових одиниць рухомого складу показав, що при однаковій потужності тягового агрегату, частоті крутіння ротора двигуна та ряді інших параметрів, електрична передача з тяговими асинхронними двигунами має кращі техніко-економічно показники порівняно з електропередачею з двигунами постійного струму. Визначальну роль у творенні електропередач з електроприводом змінного струму належить системам керування та в тому числі синтезу законів керування з використанням сучасних методів та засобів, до яких відносяться методи оптимізації, синтезу та дослідження складних технічних систем, до яких можна віднести також енергетичну систему даних об’єктів.
Для рішення подібного роду задач зазвичай використовується математичне моделювання, сучасні методи теорії автоматичного керування та оптимізації, прогресивні інформаційні технології, технічні засоби реалізації на базі мікропроцесорної техніки компонент систем автоматичного регулювання.
Проблемам математичного моделювання та оптимізації за допомогою засобів обчислювальної техніки об’єктів рухомого складу, зокрема дизель-потягів, присвячено значне число публікації як у країнах дальнього зарубіжжя, так і в СНД та Україні. Але ряд питань, що стосуються синтезу систем керування для складних об’єктів, до яких відноситься електропривод дизель-потягу з асинхронними тяговими двигунами, потребує подальної розробки та досліджень. Особливо це стосується питань, що пов’язані з розробкою раціональних математичних моделей та методів оптимізації, орієнтованих на застосування засобів обчислювальної техніки та прикладного програмного забезпечення. До того ж, наряду з традиційними методами моделювання та оптимізації, які не завжди володіють необхідною гнучкістю при рішенні конкретних практичних задач з їхніми різноманітними обмеженнями, доцільно використовувати нові перспективні методи та технології на основі штучних нейронних мереж.
Метою роботи магістра є розробка нелінійних математичних моделей систем електропередачі дизель-потягу з асинхронними тяговими двигунами, засобів їхньої реалізації з використанням сучасних засобів обчислювальної техніки та прикладного програмного забезпечення, уточнення структури та параметрів САР окремих енергетичних систем об’єкта керування згідно заданого критерію якості з використанням сучасних технологій на основі методів нечіткої логіки та нейромереж, дослідження об’єкта керування.
1. АНАЛІЗ МЕТОДІВ РОЗРОБКИ СИСТЕМ КЕРУВАННЯ ЕЛЕКТРОПРИВОДОМ ДИЗЕЛЬ-ПОТЯГУ
1.1
Дизель-потяг з тяговим електроприводом змінного струму як об’єкт керування
У нашому випадку об’єктом керування є дизель-потяг з тяговим асинхронним електроприводом. Згідно [1], асинхронний тяговий електропривод локомотива є складною динамічною системою. Первинним джерелом живлення слугує дизель-генераторна установка. Далі у схему входять: випрямлювач (В); проміжна ланка постійного струму(ПЛПС); автономний інвертор напруги(АІН); тягові асинхронні двигуни(ТАД), крутячі моменти яких передаються механічній передачі(МП) та навантаженню(Н) (локомотиву та потягу) через контакт колесо-рельс; сигнали керування для генератору та інвертору формуються під контролем мікропроцесорної системи керування(СК), що обробляє сигнали з датчиків.
Енергетична система дизель-потяга може біти віднесена до класу багатозв’язкових нелінійних об’ктів керування. Для таких об’єктів керування відсутні єдині підходи синтезу регуляторів, що забезпечують необхідні показники якості підтримання вихідних змінних у широкому діапазоні зміни обурюючих впливів та умов експлуатації.
Визначним фактором при керуванні технологічними процесами в об’єктах з асинхронними електроприводами є регулювання швидкості їхніх двигунів. З позиції теорії електричних машин та електропривода основними та найбільш економічним засобом регулювання швидкості асинхронного двигуна є частотне керування. Можливість керування швидкістю локомотива шляхом зміни частоти крутіння короткозамкнених асинхронних двигунів була доведена одразу після їхнього винаходження [2,8]. Реалізувати цю можливість вдалося лише з появою силових напівпровідникових пристроїв – спочатку тиристорів, а пізніше – транзисторів IGBT [3,11], що складають основу перетворювачів частоти. Перетворювачі частоти з мікропроцесорною системою керування мають велику кількість функцій, що вільно програмуються та автоматично виконуються. Для даного об’єкта особливий інтерес представляють та можуть бути використані:
- частотні пуск та останов двигуна з оптимальним за часом розгоном та гальмуванням;
- повне керування моментом у всьому діапазоні частот;
- векторне керування двигуном (при розімкнутій системі керування);
-ПІД-регулювання керованого технологічного параметру (при замкненій системі з датчиком цього параметру).
Дійсного часу у всьому світі в асинхронному електроприводі широко реалізується частотний спосіб керування, який сьогодні розглядається не лише з точки зору економії вжитої енергії, але й з точки зору вдосконалення систем керування.
Таким чином, питанням автоматизації процесів керування в об’єктах залізничного транспорту, зокрема за допомогою асинхронних електроприводів та їхніх систем керування, приділяється значна увага як в Україні, так і в країнах ближнього та дальнього зарубіжжя. При цьому розглядаються питання дослідження різноманітних засобів покращення якості технологічного процесу шляхом вдосконалення самих пристроїв керування, а також допоміжних пристроїв (вимірювальних датчиків, перетворювачів сигналів та ін.), створення систем керування, що забезпечують функціонування об’єкта згідно заданому критерію якості, регулювання швидкості об’єкта шляхом зміни частоти та діючої напруги живлення тягових асинхронних двигунів з використанням як відомих законів керування, так і синтезованих на основі сучасної теорії автоматичного керування, реалізації пристроїв керування з використанням засобів мікропроцесорної техніки.
1.2. Аналіз методів та критеріїв якості, що використовуються для розробки систем керування об’єктами залізничного транспорту.
При розробці систем керування можна виділити два етапи. Перший – пов’язаний з вибором або синтезом структури системи керування, виходячи з можливостей отримання достовірної інформації про використовувані вихідні величини, що поступають з вимірювальних датчиків, збурюючих впливів та характеристик керуючих дій на об’єкт керування. Другий етап пов’язаний з визначенням параметрів елементів системи керування.
Структурний синтез САК базується, як правило, на відомих аналогах , а також на теоретичних розробках І.О. Вишнеградського, А. Стодоли, Д.К. Максвелла, О.М. Ляпунова, Л.С. Понтрягіна, О.М. Лєтова, А.І. Лур’є, Р. Бєллмана, Р.Е. Калмана, М.А. Айзермана, О.А. Фельдбаума, О.О. Красовського, М.М. Красовського та інших, хто заклали основи теорії автоматичного регулювання та сучасної теорії автоматичного керування та обґрунтували основні принципи побудови систем регулювання [4-6].
Таким чином, проблеми, які з’являються у конструктора при розробці визначеної системи керування(СК) – це проблема вибору методу синтезу, для визначення структури СК та критерію, згідно якого буде оцінюватися якість процесів, що протікають в об’єкті керування.
Оцінювання якості системи можна здійснити, використовуючи загальні фундаментальні теоретичні положення або поодинокі критерії, що характерні для даного об’єкта.
Методи аналізу якості перехідних процесів згідно [4, 6, 7] можна розділити на дві основні групи: перша – прямі методи оцінювання якості по кривій перехідного процесу; друга – опосередковані методи. Прямі методи потребують рішення системи диференційних рівнянь, опосередковані – не потребують.
Основними показниками якості процесу керування, що застосовуються в інженерних розрахунках, є: час регулювання, перерегулювання та коливальність перехідного процесу. При застосуванні кореневих методів – показниками якості є ступінь стійкості та ступінь хиткості системи [4,6,7].
Практичний інтерес при синтезі систем керування представляють інтегральні оцінки якості перехідного процесу [6,7]. Вони мають метою надати загальну оцінку швидкості затухання та величини відхилення величини, що регулюється, у сукупності, без визначення того та іншого окремо. Метод інтегральних оцінок дозволяє отримати в результаті розрахунку окремих інтегралів від деякої функції керованої змінної сумарну помилку за час перехідного процесу. Недоліком інтегральної оцінки є те, що вона годиться лише для монотонних процесів, коли не змінюється знак змінної, що досліджується. Тому більш доцільно використовувати квадратичну інтегральну оцінку. Загальним недоліком інтегральних оцінювань є те, що тут нічим не обмежується Форма кривої перехідного процесу, оскільки різні по формі перехідні процеси можуть мати одне й те саме чисельне значення інтегрального критерію якості.
З урахуванням конструктивного виконання силової частини елементів системи керування електропередачі, зокрема тиристорного перетворювача частоти, елементи якого розраховані на визначену величину комутуючого струму, з розглянутих методів оцінки якості, з метою проведення параметричного синтезу СК електропередачі дизель-потягу, найбільш доцільно використовувати показники якості процесу керування: час регулювання, перерегулювання та коливальність перехідного процесу.
У дійсний час існує ряд критеріїв, що використовуються при синтезі оптимальних законів керування асинхронним електроприводом. Усім їм властивий один недолік: у якості параметра оптимізації виступає один з енергетичних або техніко-економічних показників. Однак вони можуть бути ефективно використані у випадку параметричної оптимізації, коли відома структура системи керування, а задача стоїть у визначенні коефіцієнтів компонент системи, якщо врахувати, що сьогодні існують спеціалізовані пакети прикладних програм, в основі яких лежить процедура випадкового або градієнтного пошуку.
У роботі [8] в якості критеріїв оптимального керування використовуються лінійні комбінації двох або трьох відомих критеріїв. Це дозволяє авторам при рішенні задач оптимального керування враховувати в одному критерії як вимоги до мінімізації енергетичних затрат, так і часу (двохкомпонентний критерій) або зменшення енергетичних затрат, часу процесу керування та покращення динамічних процесів об’єкту керування (трикомпонентний критерій).
Існують й інші критерії. Так, у роботах [9 –10] розглянуто новий підхід до аналітичного конструювання лінійно-квадратичних систем керування або, як їх називають у зарубіжних джерелах, задач лінійно-квадратичної оптимізації. Ці системи керування, на відміну від традиційних критеріїв, синтезуються без урахування конкретного критерію. Однак доводиться, що отримані системи керування завжди забезпечують мінімізацію деякого критерію. Це ж відмічається і в роботі [10], що функціонал, який оптимізує, не обов’язково постулювати. Він може являтися деякою супроводжуючою інтегральною оцінкою якості перехідних процесів. Така властивість притаманна критерію якості в методі аналітичного конструювання за критерієм узагальненої роботи. Складові частини функціоналу є інтегральною оцінкою якості перехідних процесів, точності стабілізації бажаного незбуреного стану, «витрат» керування або енергетичних витрат.
Сьогодні для синтезу оптимальних систем керування нелінійними об’єктами відомий цілий ряд методів.
Одним з найбільш відомих та вживаних методів оптимального керування є принцип максимуму Понтрягіна [11]. Переваги принципу максимуму проявляються там, де можна одразу, по одному виду гамільтоніана H знайти функції, на яких він сягає максимуму. Це можна зробити тоді, коли і функціонали і керування зв’язку або лінійні як відносно керувань, так і відносно фазових координат, або лінійні хоча б відносно керувань. У загальному випадку, який-небудь функціонал, екстремуми якого ми шукаємо, або рівняння зв’язку нелінійні по керуванню U(t), безпосередньо з виду гамільтоніана вже не можна судити про функції U(t), на яких він сягає максимуму.
Основна трудність рішення задач оптимального керування за допомогою принципу максимуму Понтрягіна, як і в методі динамічного програмування, запропонованого Р.Беллманом, полягає в рішенні двохкрапкової крайової задачі [12].
Відоме також значне число поодиноких методів класичного варіаційного числення, що придатні для вузьких класів задач оптимального керування [12]. Ці методи зручні для рішення задач оптимального керування, де управління шукаються у вигляді гладких або кусочно-гладких кривих, що не містять точок з нескінченними значеннями перших похідних, а також методи аналітичного конструювання регуляторів за критерієм узагальненої роботи (АКУР), де основна трудність пов’язана з визначенням коефіцієнтів функціонала, який оптимізується. Однак в теперішній час цю проблему можна вирішити за допомогою сучасних методів синтезу систем на основі нейромережевих технологій та методів нечіткої логіки.
Останні десять років інтенсивно розвиваються методи синтезу систем керування на основі векторного управління, методів нечіткої логіки, нейронних мереж та нейронечітких мереж [13– 14].
У цих роботах [16-18] з одного боку нечіткі системи керування використовуються для об’єктів управління, модель яких невідома, а з другого – як альтернатива класичним системам керування. Показано, що важливою перевагою нейромережевих систем керування є можливість їхнього навчання на прикладах. Тут же приведено ряд можливих архітектур для побудови нейромережевих систем управління.
Побудова систем векторного керування асинхронними електроприводами розглянуто в ряді публікацій [19-21]. У [19,20] розглянуті загальні принципи векторного управління електроприводами, зокрема, побудова систем векторного керування з використанням стандартних П-, ПІ-, ПІД-регуляторів. Найбільш повно методи застосування сучасних засобів штучного інтелекту (нечіткої логіки, нейронних мереж) в керування електроприводами описані в роботах [21,22]. Однак тут недостатньо уваги приділено питанням побудови моделей систем керування з використанням нечіткої логіки для конкретного типу електроприводу та проведення порівняльного аналізу з відомими системами, що містять стандартні регулятори.
Типова структура модуля нечіткої системи управління приведена на рисунку 1.2.

Рис. 1.2. Структура моделі нечіткої системи керування.
Інформація з об’єкта управління у вигляді чітких значень фазових координат об’єкта управління  поступає на блок фазифікації, який на основі чітких значень вхідних змінних формує нечіткі значення поступає на блок фазифікації, який на основі чітких значень вхідних змінних формує нечіткі значення  відповідних лінгвістичних змінних. Блок виводу на основі правил відповідних лінгвістичних змінних. Блок виводу на основі правил  вигляду: вигляду:

 , ,
де  - відповідно нечіткі значення вхідних змінних та управлінь, визначає нечіткі управління - відповідно нечіткі значення вхідних змінних та управлінь, визначає нечіткі управління  , які за допомогою блоку дефазифікації перетворюються на вектор чітких управлінь , які за допомогою блоку дефазифікації перетворюються на вектор чітких управлінь  , який впливає на виконавчі пристрої об’єкта керування за метою компенсації зовнішніх впливів ME
. , який впливає на виконавчі пристрої об’єкта керування за метою компенсації зовнішніх впливів ME
.
Зазвичай нечіткі системи керування застосовуються у випадках, коли модель об’єкта невідома.
Системи керування на основі штучних нейронних мереж багатьма авторами розглядаються як альтернатива класичним системам керування. У наш час відомий цілий ряд можливих архітектур побудови нейромережевих систем керування [23-24]. Великий інтерес до нейромережевих систем керування пов’язаний з тим, що вони мають ряд корисних властивостей, яких складно досягти за допомогою інших методів. Зокрема, мова йде про робастість систем керування, про визначення управлінь в умовах, коли неточно відома модель об’єкта про більш гнучке реагування на мінливі зовнішні умови та можливість обробки даних різної природи. Можна також відмітити, що для нейромережевих моделей не існує обмежень, пов’язаних з лінійністю системи або видом застосовуваного функціонала. Важливою перевагою нейромережевих систем керування є також можливість їхнього навчання на прикладах.
До істотного недоліку нейромережевих систем управління слід віднести недоступність знань, накопичених в системі та розподілених між усіма нейронами, зовнішньому спостерігачеві. Частково цей недолік подоланий у нейронечітких системах управління, які, з одного боку, використовують нечіткі правила виробки рішень, а з іншого – володіють здатністю до навчання.
В результаті можна відмітити, що виходячи з особливостей розглянутого об’єкта та характеристик методів оптимізації, найбільш доцільно використовувати для розробки системи управління методи нечіткої логіки та методи на основі нейромережевих технологій.
2. РОЗРОБКА МОДЕЛІ СИСТЕМИ КЕРУВАННЯ ЕЛЕКТРОПЕРЕДАЧІ ДИЗЕЛЬ-ПОТЯГУ
2.1. Моделювання тягових двигунів дизель-потягу
Даний розділ присвячено питанням розробки математичної моделі системи керування енергетичної системи дизель-потягу з тяговими асинхронними двигунами та їхній технічній реалізації з використанням комп’ютерних та інформаційних технологій. Серед розглянутих моделей приведені результати розробки моделей тягових двигунів з урахуванням їхнього використання для рішення задач синтезу регуляторів та дослідження об’єкту в цілому, моделей пристроїв формування керуючих впливів для випадків представлення ТАД у нерухомій двохфазній та трифазній системі координат, моделей регуляторів САК, системи керування та їхніх функціональних схем із врахуванням технічної реалізації, результати дослідження моделей та визначення адекватності.
У якості тягового асинхронного двигуна в системі, що моделюється, приймається ідеалізована машина з симетричною системою обмоток статора і ротора, гладким повітряним зазором, синусоїдальним розподілом магнітного потоку уздовж окружності статора і ротора, при роздільному обліку насичення по головному шляху магнітного потоку та по шляхам розсіювання, без урахування ефекту витіснення струму в обмотках ротора та втрат сталі [25].
Об’єкт дослідження в загальному вигляді може бути представлений системою диференційних рівнянь, що описують електромагнітні процеси ТАД як у прямокутній системі координат α, β, так і в природній (в осях a,b,0) [26].
Математична модель електроприводу у нерухомій прямокутній системі координат у осях α і β описується системою диференціальних рівнянь (2.1), що приведені нижче [26, 27].
 (2.1) (2.1)
де  , ,  , ,  , ,  , ,  , ,  - відповідно проекції на вісі координат α і β потокозчеплення, напруги та струму обмоток статора; - відповідно проекції на вісі координат α і β потокозчеплення, напруги та струму обмоток статора;
 , ,  , ,  , ,  - відповідно проекції на вісі координат α і β потокозчеплення та струми обмоток ротора; - відповідно проекції на вісі координат α і β потокозчеплення та струми обмоток ротора;
 , ,  , ,  , ,  , ,  , ,
 , , ; ;  , ,  , ,  , ,  , ,  , ,  - постійні коефіцієнти для даного типу ТАД. - постійні коефіцієнти для даного типу ТАД.
Струми , , , визначаються через потокозчеплення  , ,  , ,  , ,  наступним чином: наступним чином:
 ; ;  ; ;  ; ;  . .
Момент опору навантаження Мс
у залежності від частоти  може бути представлений у вигляді лінійної залежності, що визначається виразом: може бути представлений у вигляді лінійної залежності, що визначається виразом:
 (2.2) (2.2)
або нелінійної залежності:
  , (2.3) , (2.3)
де a0
, b0
, b1
– постійні величини.
Використання рівнянь у нерухомій системі координат та врахування несинусоїдальної форми напруги живлення ТАД призводить до надмірної громіздкості рівнянь та складності математичної моделі, однак дозволяє проводити дослідження з урахуванням миттєвих значень змінних станів, що в ряді випадків є необхідним при дослідженні явищ, що притікають в системах електропривода. Тому для якісних досліджень на ПЕОМ доцільно використовувати метод огинаючої, запропонований О.О.Булгаковим [27, 28]. При цьому для запису рівнянь використовується система ортогональних осей X, Y, що обертаються синхронно зі швидкістю результуючого вектора напруги (струму) статора. Цей метод годиться для обмеженої області частот, коли пульсаціями швидкості двигуна, які зумовлені несинусоїдальністю напруги, можна знехтувати.
Рівняння асинхронного двигуна в синхронній системі координат X, Y мають вигляд [27, 26]:
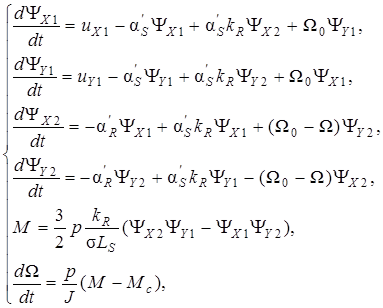 (2.4) (2.4)
де  - кутова частота напруги статора двигуна при p = 1; - кутова частота напруги статора двигуна при p = 1;
 , ,  , ,  , ,  , ,  , ,  - відповідно проекції на осі X1
та Y1
, X2
та Y2
потокозчеплень статора і ротора та напруги живлення; всі інші змінні були описані вище. - відповідно проекції на осі X1
та Y1
, X2
та Y2
потокозчеплень статора і ротора та напруги живлення; всі інші змінні були описані вище.
Напруги по осям X, Y (функції впливу) визначаються наступними рівняннями для випадку синусоїдальних напруг на статорі двигуна:
= UM
cos [(W0
– WK
)t + jK
],
 = UM
sin [(W0
– WK
)t + jK
], = UM
sin [(W0
– WK
)t + jK
],
де UМ
- амплітуда першої гармоніки фазної напруги на статорі двигуна;
 - кутова швидкість обертання осей координат; - кутова швидкість обертання осей координат;
 - довільна початкова фаза напруги обмотки А статора. - довільна початкова фаза напруги обмотки А статора.
У випадку синхронних осів  за умови, що початкова фаза напруги за умови, що початкова фаза напруги  , функції впливу – це постійна напруга, яка дорівнює UM
по осі X, та нульова напруга по осі Y. , функції впливу – це постійна напруга, яка дорівнює UM
по осі X, та нульова напруга по осі Y.

Рис.2.1. Структурна схема моделі в пакеті MatLab.
На рис. 2.1 приведена структурна схема моделі, що реалізує систему рівнянь (2.4) у пакеті MathLab. Вона складається з наступних частин: блока формування сигналів керування(функцій впливів) по амплітуді  (Subsystem1) та частоті w0
(Subsystem2); блока інтегрування системи диференційних рівнянь (2.4) у вигляді субблока Object1; блока задавання похідних даних та параметрів ТАД; блока обмеження амплітуди та частоти напруги сигналу керування та ряду допоміжних блоків (перемикачів – Switch); блока, який задає певне співвідношення між амплітудою напруги та частотою (один з таких законів управління U/f = const); блоків відображення інформації. (Subsystem1) та частоті w0
(Subsystem2); блока інтегрування системи диференційних рівнянь (2.4) у вигляді субблока Object1; блока задавання похідних даних та параметрів ТАД; блока обмеження амплітуди та частоти напруги сигналу керування та ряду допоміжних блоків (перемикачів – Switch); блока, який задає певне співвідношення між амплітудою напруги та частотою (один з таких законів управління U/f = const); блоків відображення інформації.
Вхідними сигналами для субблока моделі Object1 є сигнали, пропорційні керуючим впливам и w0
, а вихідними сигнали – потокозчеплення (X1
, Y1
, X2
, Y2
), струми (X5
– X8
) ТАД та кутова швидкість крутіння ротора двигуна в залежності від моменту навантаження, що визначається моментом інерції J. У математичній та машинній моделях мають місце наступні відповідності:
 º X1
; º X1
;  º Y1
; º Y1
;  º X2
; º X2
;  º Y2
. º Y2
.
Змінні X5
– X8
- проекції струмів статорної та роторної обмоток ТАД на відповідні осі координат.
На рис. 2.2 і 2.3 приведені перехідні процеси у вигляді осцилограм, що демонструють роботу моделі при визначених початкових умовах у замкненій системі керування (сигнали керування формуються або згідно до певного закону, наприклад U/f = const, або згідно до заданого закону керування, синтезованого з використанням змінних стану об’єкту). На рис. 2.4 приведені процеси, відповідні сигналу задавання w0
та сигналу w, відповідної швидкості обертання ротора ТАД при визначених заданих умовах розгону та відповідних параметрах ТАД, який являє собою деяку інтегральну характеристику розглянутого об’єкта керування.

Рис. 2.2. Залежності X1
(t), Y1
(t), X2
(t), Y2
(t).
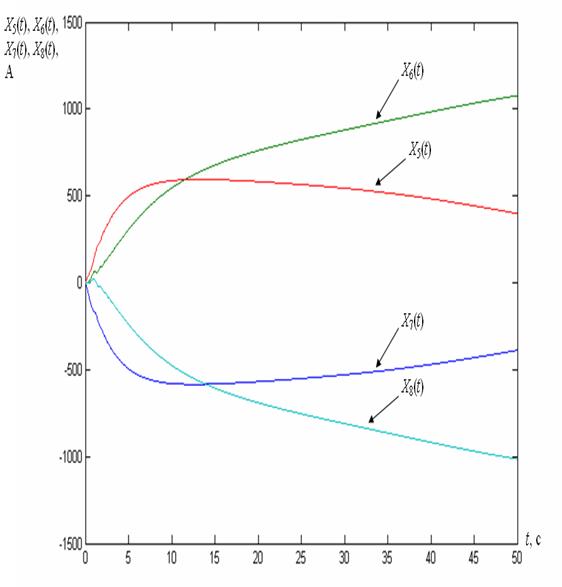
Рис. 2.3. Залежності X5
(t), X6
(t), X7
(t), X8
(t).
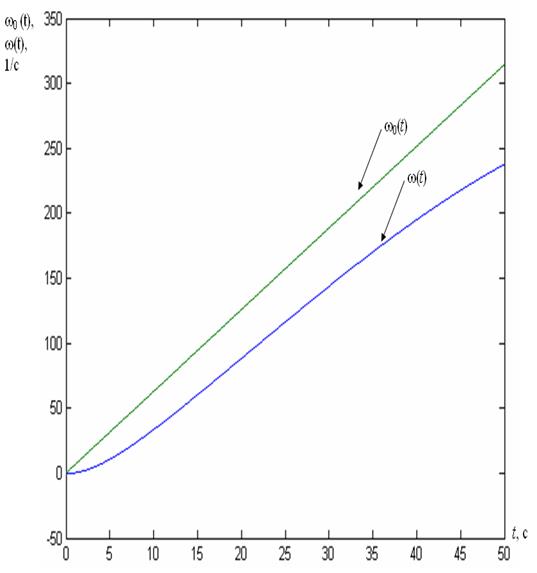
Рис. 2.4. Залежності w0
(t), w(t).
Ряд експериментів, проведених з моделлю, підтвердили її адекватність, що й дозволило зробити висновок про те, що запропонована модель в осях X, Y,0 може бути використана для проведення досліджень та синтезу керуючих впливів у вигляді амплітуди і частоти напруги живлення ТАД. Крім того, вона може бути використана для уточнення структур САК, що вже маються, та розробки структур САК на основі синтезованих законів керування згідно заданих критеріїв якості, а також визначення та уточнення параметрів САК по результатам досліджень. Особливо вона корисна для попередньої оцінки параметрів регуляторів, які синтезуються для системи керування.
Для проведення комплексних досліджень синтезованих систем управління може бути використана модель ТАД у фазних координатах a, b, 0 зі врахуванням насичення, яка представлена у вигляді системи рівнянь:
 , ,
 , ,
 , (2.5) , (2.5)  , ,
де  – відповідно потокозчеплення, напруга та струм фаз a та b статора; – відповідно потокозчеплення, напруга та струм фаз a та b статора;
 – потокозчеплення та струм обмоток фаз a та b ротора; – потокозчеплення та струм обмоток фаз a та b ротора;
 – модуль вектора струму, який намагнічує; – модуль вектора струму, який намагнічує;
 –електромагнітний момент ТАД. –електромагнітний момент ТАД.
Відповідність вище приведених параметрів між собою має вигляд:
 ; ;  ; ;  ; ;  ; ;  ; ;  ; ;  ; ;  ; ;  ; ;  ; ;  ; ;  ; ;  ; ;
 . .
Математична модель ТАД, що представлена у вигляді рівнянь (2.5), більш складна, ніж моделі вигляду (2.1) і (2.4), оскільки тут ряд параметрів є постійними величинами, як у попередніх моделях, а являють собою функції модуля вектору току, що намагнічує.
Аналіз моделей, що задані системами рівнянь (2.1) – (2.5), показує, що в залежності від мети досліджень, кожна з них може біти використана для визначення керуючих впливів.
Аналіз різних форм запису показує, що для моделювання безпосередньо двигуна та механізму, без урахування властивостей джерела живлення (приймаємо його джерелом ЕРС), найбільш проста модель виходить при запису рівнянь двигуна в рухомій системі координат в осях X,Y через потокозчеплення. Моделювання ТАД як у прямокутній системі координат a, b, так і у природній (в осях a,b,0) доцільно використовувати для дослідження об’єкту керування у замкненій системі регулювання з урахуванням протікання електромагнітних процесів.
2.2.
Моделювання пристроїв САК об’єкта керування
Електропередача дизель-потягу має автономну систему автоматичного керування, яка здійснює спільну роботу з дизелем та забезпечує керування тяговими асинхронними двигунами для реалізації тягових характеристик у всьому діапазоні швидкостей та навантажень. У електропередачі, що досліджується, використовується САК, яка забезпечує формування амплітудного значення напруги живлення та частоти тягових асинхронних двигунів. В електропередачі дизель-потягу САК виконана двоконтурною. Перший контур здійснює регулювання збудження тягового генератора та задає величину напруги, яка підводиться до двигунів. Він забезпечує стабілізацію струму асинхронних двигунів при пуску та регулювання струму та напруги генератора в зоні дії обмеження по напрузі дизеля. Другий контур регулювання є підлеглим по відношенню до першого, він здійснює регулювання частоти живлення тягових двигунів.
Для розробки моделей пристроїв САК використані структурна схема системи керування та функціональні схеми каналів регулювання окремих компонентів енергетичної системи дизель-потягу.
Структурна схема системи управління електропередачі дизель-потягу приведена на рис. 2.5.
При дослідженні САК об’єкта керування практичний інтерес являють математичні моделі регуляторів тягового генератора та електропривода з метою формування керуючих впливів по каналу напруги та частоти [26].

Рис. 2.5. Структурна схема системи керування електропередачі дизель-потягу.
До першого контуру САК електропередачі відноситься регулятор тягового генератора (РТГ), який призначений для формування сигналу керуючого впливу по збудженню тягового генератора UУГ
. В якості вхідних сигналів для РТГ використовуються напруга, пропорційна частоті тягового генератора UfГ
; напруга обмотки збудження UВ
; струм мостів випрямлювачів IОТ
; напруга задавання UЗГТ
; активні струми Id1
, Id2
кожного ТАД; напруга генератора UГ
.
Формування сигналу UУГ
з урахуванням забезпечення динамічних показників системи здійснюється шляхом включення у контур регулювання пристроїв, які функціонують згідно до певних алгоритмів, що реалізують відповідні закони управління, такі як пропорційний, інтегральний, пропорційно-інтегральний або більш складні, якщо не можна досягти заданих показників якості шляхом застосування одного з названих алгоритмів.
У САК електропередачі дизель-потягу для формування сигналу керуючого впливу по збудженню тягового генератора UУГ
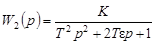
, як один з можливих варіантів, може бути використаний пропорційно-інтегральний закон управління. Математична модель регулятора збудження може бути представлена у вигляді:
 , (2.6) , (2.6)
 , (2.7) , (2.7)
 , (2.8) , (2.8)
UЗГ
= UЗГ2
– UУВ
= K9
+ K7
UfГ
– UУВ
, (2.9)
UfГ
= fГ
 , (2.10) , (2.10)
UЗВ
= K8
UfГ
+  , (2.11) , (2.11)
UУВ
= K6
(UЗВ
+ UВ
), (2.12)
UВ
= UВГ
 , (2.13) , (2.13)
де K1
– K10
– коефіцієнти підсилення;
Т1
– Т5
– постійні часу інтегрування;
р – оператор Лапласа;
UЗГ2
– сигнал керування, що здійснює обмеження максимальної напруги тягового генератора.
Значення UЗГ1
формується з використанням блоку задавання інтенсивності, що забезпечує темп наростання відповідного сигналу в перехідному режимі. Величина T3
визначається з умови:
T3
= T31
при UЗГ1
£ UЗГ
;
T3
= T32
при UЗГ1
> UЗГ
,
де Т31
, Т32
– постійні часу інтегрування, що визначаються в процесі досліджень.
За допомогою сигналу управління UУВ
здійснюється обмеження максимального значення напруги збудження тягового генератора.
Коефіцієнти передач К2
, К3
та постійні часу Т2
, Т3
визначаються в процесі досліджень. При цьому значення постійної часу Т3
(блок задавання інтенсивності), як правило, має різні значення при «накиданні» та « скиданні» сигналу UЗГ
, який на нього поступає.
З метою визначення структури та параметрів регулятора вихідної напруги інверторів електроприводу, його модель може бути представлена сукупністю моделей каналу струму Ig
та каналу потужності РГ
.
Ці канали призначені для формування сигналу керуючого впливу UУШ
по вихідній напрузі інверторів.
Математична модель регулятору вихідної напруги інверторів електроприводу каналу струму Ig
в режимі без урахування процесів буксування може бути представлена у вигляді:
 = =   , (2.14) , (2.14)
 (2.15) (2.15)
 = KIg = KIg
 , (2.16) , (2.16)
 = =  , (2.17) , (2.17)
UG
=   , (2.18) , (2.18)
IYG
=K8
UG
, (2.19)
  = IYG = IYG
   , (2.20) , (2.20)
 де Кi
(i = 1, 10) – коефіцієнти підсилення; де Кi
(i = 1, 10) – коефіцієнти підсилення;
Тj
(j = 1, 4) – постійні часу (Т1
–постійна часу блоку задавання інтенсивності);
 – вихідний сигнал низькочастотного фільтру, що встановлюється на виході ПІ-регулятора; – вихідний сигнал низькочастотного фільтру, що встановлюється на виході ПІ-регулятора;
KIg
– вихідний сигнал ПІ-регулятора каналу струму;
 – сигнал, пропорційний струму навантаження ТАД; – сигнал, пропорційний струму навантаження ТАД;
IYG
– вхідний сигнал формувача зворотного зв’язку по каналу струму;
UG
– сигнал, який відповідає ефективному значенню напруги живлення ТАД.
Співвідношення (2.15) описує модель регулятора каналу обмежувача струму (канал Ig
), використовуючи при цьому пропорційно-інтегральний закон керування. При проведенні досліджень не виключається використання також інших законів керування.
Формування сигналу задавання UЗТ
здійснюється на основі використання сигналу, пропорційного номеру позиції контролеру машиніста, з встановленням певного темпу його наростання.
Математична модель регулятора вихідної напруги інверторів електроприводу каналу потужності PГ
у режимі тяги може бути представлена у вигляді:
 = K2 = K2
 W(p), (2.21) W(p), (2.21)
W(p) =  , (2.22) , (2.22)
 = =   , (2.23) , (2.23)
IУМ
=  , (2.24) , (2.24)
  = IУМ
UУГ = IУМ
UУГ
 , (2.25) , (2.25)
де Кi
(i = 2, 6) – коефіцієнти підсилення;
Тj
(j = 1, 2) – постійні часу(Т1
–постійна часу блока задавання інтенсивності);
UУШ
– сигнал керуючого впливу по вихідній напрузі інверторів;
– вихідний сигнал регулятора каналу потужності;
 – сигнал, пропорційний вживаній потужності ТАД; – сигнал, пропорційний вживаній потужності ТАД;
UУГ
– сигнал , пропорційний напрузі генератора;
IУМ
– вхідний сигнал формувача зворотного зв’язку по каналу потужності;
b1
, b2
– постійні коефіцієнти;
Т – постійна часу блока задавання інтенсивності.
Формування сигналу задавання UЗМ
здійснюється на основі використання сигналу, пропорційного номеру позиції контролеру машиніста, з установленням визначеного темпу його наростання.
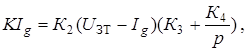
На основі розробленої моделі уточнена структура САК каналу обмеження струму, визначені значення параметрів регулятора вихідної напруги з урахуванням забезпечення вимог до якісних показників перехідного процесу (величини перерегулювання, часу регулювання, числа коливань) [2-106]. Результати досліджень регулятора вихідної напруги (канал обмеження струму) при різних коефіцієнтах підсилення К4
приведені на рис. 2.7, де процеси 1-5 (криві перехідних процесів струму навантаження ТАД) відповідають коефіцієнтам підсилення К4
, відповідно: 0.2; 0.3; 0.4; 0.5; 0.6.

Рис. 2.6. Структурна схема моделі регулятора вихідної напруги.

Рис. 2.7. Результати моделювання з різними коефіцієнтами підсилення К4
.
Рис. 2.8. Результати роботи ланки корекції.
На рис. 2.8 приведені результати моделювання (криві перехідних процесів струми навантаження ТАД) скоректованої системи регулювання, що забезпечує виконання необхідних вимог до якісних показників перехідного процесу регулятора вихідної напруги інверторів. Крива 1 – перехідний процес струму навантаження ТАД без урахування корекції; крива 2 – з урахуванням корекції.
2.3.
Розробка моделі блоку «синхронний генератор-випрямлювач» електропередачі дизель-потягу з використанням нейронних мереж
Аналіз і синтез систем керування складними енергетичними об’єктами, до яких відноситься електропередача дизель-потягу з асинхронним тяговим електроприводом, нерозривно пов’язані з питаннями створення їхніх моделей з метою проведення комплексних досліджень, а також уточненням структури та параметрів пристроїв для розробки.
Питанням моделювання окремих блоків системи керування електропередач потягів присвячено значне число робіт. Однак традиційні підходи викликають труднощі при вирішенні вказаних задач. Тому постійно йде пошук у напрямку створення моделей на основі досягнень сучасних комп’ютерних технологій рішення цих задач, зокрема нейромережевих технологій. Однією із задач при вирішенні цих проблем є адаптація відомих архітектур нейронних мереж для побудови моделей компонентів структури САР енергетичної системи дизель-потягу.
У нашому випадку об'єктом моделювання є блок "синхронний генератор-випрямлювач". Його моделювання виконаємо за допомогою нейронних мереж.
Математичну модель блоку "синхронний генератор-выпрямитель" можна представити сукупністю моделей синхронного генератора (СГ) і випрямлювача (У).
Відповідно до загальноприйнятих допущень математичну модель СГ, що представляє собою ідеалізовану явнополюсну синхронну машину, яка має на роторі обмотку збудження і по одному короткозамкненому контуру в подовжній і поперечній осях, у координатній системі d, q можна представити наступною системою диференціальних рівнянь (2.26):
 ; ;
 ; ;
 ; (2.26) ; (2.26)
 ; ;
 , ,
Де  – відповідно потокозчеплення та струми обмоток: статора (по осям d і q), збудження і демпферних (по осям d і q); – відповідно потокозчеплення та струми обмоток: статора (по осям d і q), збудження і демпферних (по осям d і q);
 – активні опори обмоток статора, збудження та демпферних (по осям d і q); – активні опори обмоток статора, збудження та демпферних (по осям d і q);
 – кутова частота обертання ротора. – кутова частота обертання ротора.
Облік насичення магнітного кола в явнополюсних синхронних машинах зазвичай вироблятися тільки по подовжній осі. Для цього у вираженнях для потокозчеплень індуктивний опір реакції якоря по подовжній осі представляють як функцію подовжньої складовий потокозчеплення в повітряному зазорі  . У цьому випадку вираження для потокозчеплень контурів синхронної машини по подовжній осі мають наступний вид: . У цьому випадку вираження для потокозчеплень контурів синхронної машини по подовжній осі мають наступний вид:
 ; (2.27) ; (2.27)
 ; (2.28) ; (2.28)
 ; (2.29) ; (2.29)
 ; (2.30) ; (2.30)
 , (2.31) , (2.31)
де  – відповідно опори розсіювання обмоток статора, збудження та демпферної по осі d; – відповідно опори розсіювання обмоток статора, збудження та демпферної по осі d;
 – опір реакції якоря подовжній осі (2.31). – опір реакції якоря подовжній осі (2.31).
У результаті рішення системи рівнянь (2.26) з урахуванням виразів (2.27)-(2.31) визначаються струми статорної обмотки по осям d і q -  і і  . Фазні струми СГ . Фазні струми СГ  , що являються впливом, яке задає, для математичної моделі некерованого трифазного випрямлювача, знаходяться за допомогою лінійних перетворювань: , що являються впливом, яке задає, для математичної моделі некерованого трифазного випрямлювача, знаходяться за допомогою лінійних перетворювань:
 ; (2.32) ; (2.32)
 ; (2.33) ; (2.33)
 ; (2.34) ; (2.34)
 , (2.35) , (2.35)
де  – значення кута при t = 0. – значення кута при t = 0.
Напруга обурення  і і  визначається згідно до виразів: визначається згідно до виразів:
 ; (2.36) ; (2.36)
 , (2.37) , (2.37)
де  - фазні напруги СГ, одержувані за допомогою перетворювача, що формує ці напруги на основі фазних струмів СГ. - фазні напруги СГ, одержувані за допомогою перетворювача, що формує ці напруги на основі фазних струмів СГ.
Реалізація математичної моделі, заданої системою диференціальних рівнянь (2.26) і рівняннями (2.27) - (2.37) з використанням сучасних пакетів прикладних програм, наприклад пакета MATLAB, не викликає особливих труднощів. Вона зводиться до побудови структури моделі з наявної бібліотеки блоків пакета і розрахунку параметрів моделі.
У ряді випадків моделювання блоку "синхронний генератор-випрямлювач" можна здійснити, використовуючи його навантажувальні характеристики, представлені на рис. 2.9.
Здатність штучних нейронних мереж, навчених на деякій множині даних, видавати правильні результати для досить широкого класу нових даних є дуже вагомим аргументом для побудови моделей різних систем. У даному випадку ця властивість нейронної мережі підходить для створення моделі блоку "синхронний генератор-випрямлювач " за навантажувальними характеристиками. При цьому робота моделі полягає в наступному: на вхід подаються струми збудження  (формування струму збудження розглянуто в розділі 2.2) і навантаження (формування струму збудження розглянуто в розділі 2.2) і навантаження  , на виході повинне формуватися випрямлена напруга , на виході повинне формуватися випрямлена напруга  , значення якої відповідає графікам навантажувальних характеристик (рис 2.9.) Причому мережа повинна працювати не тільки на тренувальних шаблонах, але і виконувати поставлену задачу на всіх припустимих значеннях вхідних сигналів. , значення якої відповідає графікам навантажувальних характеристик (рис 2.9.) Причому мережа повинна працювати не тільки на тренувальних шаблонах, але і виконувати поставлену задачу на всіх припустимих значеннях вхідних сигналів.
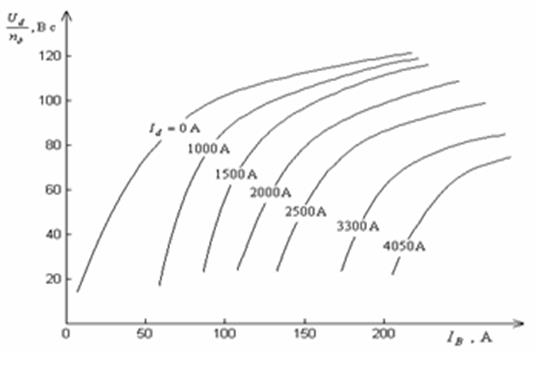
Рис. 2.9. Навантажувальні характеристики СГ.
Для побудови моделі обрана багатошарова нейронна мережа прямої передачі сигналів із двома нейронами у вхідному шарі (кількість входів), двома схованими шарами й одним нейроном у вихідному шарі. Для нейронів схованих шарів використовувалися нелінійні сигмоїдальні функції активації нейронів.
У результаті моделювання знайдене оптимальне число нейронів для першого і другого схованих шарів мережі, відповідно 10 і 15 нейронів. Для навчання мережі використовувалися дані рис.2.9.
Погрішність відтворення характеристик у всьому робочому діапазоні за допомогою нейронної мережі не перевищувала 1,5%, що краще, ніж у моделей, реалізованих традиційним способом.
3. РОЗРОБКА СИСТЕМИ КЕРУВАННЯ ЗА ДОПОМОГОЮ МЕТОДІВ НЕЧІТКОЇ ЛОГІКИ І НЕЙРОННИХ МЕРЕЖ ДЛЯ ОПТИМІЗАЦІЇ ДИНАМІЧНИХ ПРОЦЕСІВ ЕЛЕКТРОПРИВОДА
3.1 Розробка системи керування електроприводом змінного струму з використанням методів нечіткої логіки та нейроконтролерів
Тяговий електропривод дизель-потяга являє собою конструктивну сукупність тягових асинхронних двигунів, перетворювачів частоти і пристрою керування. Зростання ступеня інтеграції в мікропроцесорній техніці і перехід від мікропроцесорів до мікроконтролерів привів до заміни аналогових систем керування тяговими електроприводами на системи безпосереднього цифрового керування. Перехід до широкодіапазонних (до 1:10000), швидкодіючих електроприводів транспортних засобів, зажадав застосування більш складних структур на основі векторного керування.
При векторному керуванні, на відміну від частотного, керування швидкістю обертання тягового асинхронного двигуна здійснюється за допомогою регулювання амплітуди і фази вектора поля двигуна. Таке керування є найбільш точним у динаміці та статиці, а також більш економічним.
Однак, як при частотному, так і при векторному способі керування, необхідно здійснювати керування процесом розгону дизель-потяга з урахуванням протікання електромагнітних процесів і оптимізації енергетичних витрат, що вимагає у свою чергу створення ефективних систем керування. Як відзначено в розділі 1, одним із критеріїв якості протікання електромагнітних процесів є величина перерегулювання. Задачею системи керування в даному випадку є те, що б величина перерегулювання не перевищувала деякого граничного значення в перехідному режимі. В існуючих системах керування тягових електроприводів ці задачі вирішувалися за допомогою використання ПІД регуляторів і блоків задавання інтенсивності, що формують сигнал керування в залежності від зростання чи убування сигналу керування на виході відповідного ПІД регулятора. В останні роки рішення аналогічних задач пропонується виконувати з використанням сучасних технологій, в основі яких лежать методи аналізу і синтезу складних технічних систем, зокрема систем векторного керування і нейромережевих технологій, використовуючи при цьому пряме цифрове керування моментом. Відмінною рисою цих рішень є гранично висока швидкодія систем керування, реалізованих, як правило, на базі цифрових релейних регуляторів чи регуляторів, що працюють на принципах нечіткої логіки та нейроконтролерів.
У цьому розділі приведені результати розробки моделі системи керування з використанням методів нечіткої логіки для електропривода дизель-потяга з тяговими асинхронними двигунами і порівняльний аналіз за допомогою моделювання динамічних характеристик, у порівнянні з системами керування, побудованими на основі стандартних ПІД - регуляторів.
На рис. 3.1 приведена структура блоку нечіткого контролера швидкості для системи векторного керування двигуном електропривода дизель-потяга. Тут:
БД - блок диференціювання;
НК - нейроконтроллер;
БІ - блок інтегрування;
БВУ - блок векторного управління;
АД- асинхронний двигун;
Е - сигнал помилки;
СЕ - сигнал, пропорційний похідної сигналу помилки;
DU, U - відповідно сигнали на виходах блоків НК і БІ;
 , ,  - відповідно сигнал, пропорційний швидкості обертання ротора двигуна і швидкості, що задається (сигнал завдання). - відповідно сигнал, пропорційний швидкості обертання ротора двигуна і швидкості, що задається (сигнал завдання).
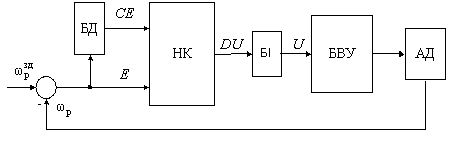
Рис. 3.1. Структурна схема регулятора швидкості.
На вхід нейроконтролера надходять два сигнали: Е и СЕ. Сигнал помилки визначається як :
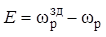 (3.1) (3.1)
Зміна значення помилки СЕ визначається похідної сигналу помилки Е як  . .
Нейроконтролер, на підставі значення сигналу помилки Е установлення швидкості, відповідно змінює вихідний сигнал DU так, щоб поточна швидкість відповідала швидкості, що задається .
У дискретній системі
 , (3.2) , (3.2)
де  на відрізку часу на відрізку часу  . Якщо - константа, то значення сигналу CE пропорційно сигналу . Якщо - константа, то значення сигналу CE пропорційно сигналу  . .
Вихідний сигнал DU нейроконтролера в системі векторного керування асинхронним двигуном електропривода є відповідною величиною струму завдання  [20]. Після його інтегрування блоком БІ одержуємо середнє значення на періоді квантування сигналу U, пропорційного струму завдання [20]. Після його інтегрування блоком БІ одержуємо середнє значення на періоді квантування сигналу U, пропорційного струму завдання  . Виходячи з фізичного принципу керування системою, алгоритм керування наступний: . Виходячи з фізичного принципу керування системою, алгоритм керування наступний:
якщо E = ZE і СЕ  PS, (3.3) PS, (3.3)
то на виході нейроконтролера формується сигнал
DU = NS. (3.4)
де E і СЕ - вхідні нечіткі змінні;
ZE, PS, NS - невеликі позитивні числа.
У цьому випадку сигнал DU на виході нейроконтролера - нечітка змінна, а змінні ZE, PS і NS є множиною MF функції приналежності.
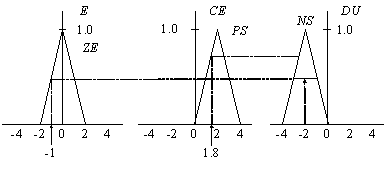
Рис. 3.2. Вигляд функцій приналежності.
На рис. 3.2 множину функцій приналежності представлено у виді трикутних функцій.
Формування вихідного сигналу нейроконтролером здійснюється на основі декількох окремих нечітких правил. На рис. 3.3 приведена ілюстрація принципу формування сигналу керування DU на основі двох правил з використанням методу Мамдані [21]:
Правило 1: Якщо E = ZE і CE = NS, то DU = NS.
Правило 2: Якщо E = PS і CE = NS, то DU = ZE,
де DU - вихідний сигнал нейроконтролера.
Для даної бази правил керуючої системи, нечіткий контролер обчислює багатозначний керуючий вплив для специфічних значень вхідних перемінних. У [21] описані кілька правил для одержання керуючого впливу, але найбільше часто використовується правило типу "МАКСИМУМ-МІНІМУМ". На рис. 3.3 показаний принцип формування сигналів керування на основі двох правил.

Рис. 3.3. Принцип роботи контролера швидкості на основі двох правил.
Вихідна функція приналежності кожного правила визначається оператором "МІНІМУМ", а формування нечіткого виходу виконується оператором "МАКСИМУМ".
Оскільки нечіткий нейроконтролер виконує функцію статичного нелінійного перетворення, то можна записати дії контролера у формі:
 (3.5) (3.5)
де  і і  - нелінійні коефіцієнти. - нелінійні коефіцієнти.
З урахуванням процесу інтегрування за допомогою блоку БІ (див. рис. 3.1) одержуємо середнє значення сигналу U, пропорційне току завдання  відповідно до виразів: відповідно до виразів:
 (3.6) (3.6)
чи
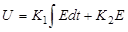 , (3.7) , (3.7)
що є формою запису нечіткого ПІ контролера з нелінійними коефіцієнтами. Подібним чином можна записати алгоритм нечіткого контролера для П- і ПІД-контролеров.
Алгоритм для нечіткого П-контроллера:
Якщо Е = PS, то U = PB, (3.8)
де PB - велике позитивне число.
Чи можна записати:
U = KE, (3.9)
де K - нелінійний множник.
Алгоритм для нечіткого ПІД - контролера:
Якщо
Е = PS і CE = NS і E = PS, то DU = ZE, (3.10)
де E - похідна СЕ.
Керування може бути записане у формі:
 . (3.11) . (3.11)
З урахуванням процесу інтегрування за допомогою блоку БІ (як і для ПІ-регулятора) одержуємо середнє значення сигналу U, пропорційного струму задавання  відповідно до виразів: відповідно до виразів:
 (3.12) (3.12)
чи
 , (3.13) , (3.13)
тобто ПІД-контролер.
Нелінійні коефіцієнти, що адаптуються в процесі функціонування, у нечіткому контролері дозволяють стійко формувати сигнали керування при зміні параметрів системи в процесі функціонування.
Загальна структура нечіткої системи зі зворотним зв'язком приведений на рис. 3.4.
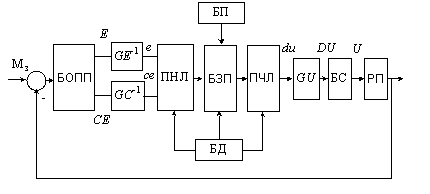
Рис. 3.4. Структура нечіткого контролера у системі керування зі зворотнім зв’язком.
Тут:
БП - база правил для нечіткого нейроконтролера;
ПНЛ - перехід до нечіткої логіки;
ПЧЛ - повернення до чітких значень;
БД - база даних;
РП - регульований пристрій,
БОПП - блок обчислення помилки і її похідної,
БЗП - блок застосування правил.
Сигнали помилки E і зміни помилки CE перетворяться у відповідні сигнали у відносних одиницях e і ce шляхом розподілу на масштабні коефіцієнти, тобто : e=E/GE і ce=CE/GC. Аналогічно, вихідний контролюючий сигнал U обчислюється шляхом множення вихідного сигналу у відносних одиницях на масштабний коефіцієнт GU, тобто DU=duGU, з наступним його інтегруванням для одержання U.
Перевага нечіткого нейроконтролера при використанні відносних одиниць полягає в тому, що той самий керуючий алгоритм може бути використаний для всіх керованих об'єктів одного типу. Масштабні коефіцієнти можуть бути задані як константи чи бути програмованими; програмовані масштабні коефіцієнти можуть контролювати чутливість.
Результати моделювання системи керування електроприводом, що містить тягові асинхронні двигуни з використанням стандартного ПІ регулятора і побудованого з використанням нечіткої логіки в середовищі MATLAB приведені в розділі 4.
3.2 Вибір функцій приналежності нечітких змінних при розробці нечіткого регулятора на основі нейроконтролера в системі керування електроприводом змінного струму
В останні роки в теорії автоматичного керування з'явився напрямок, пов'язаний з методами нечіткої логіки, що дозволяють будувати цифрові регулятори, які забезпечують гранично високу швидкодію систем керування. Однак залишається відкритим питання вибору функцій приналежності для нечітких змінних, що описують функціонування регулятора. Тому доцільно провести порівняльний аналіз різних функцій приналежності і їхній вплив на роботу проектованого регулятора.
Узагальнена структура системи векторного керування тяговим двигуном електропривода змінного струму дизель-потяга з використанням нечіткого контролера по кутовій швидкості двигуна [29] приведена на рис. 3.4.
Сигнали помилки і похідної помилки перетворюються блоками GE-1
і GC-1
у відповідні сигнали у відносних одиницях e і ce шляхом ділення на масштабні коефіцієнти. Аналогічно, вихідний керуючий сигнал u обчислюється шляхом множення вихідного сигналу у відносних одиницях du на масштабний коефіцієнт GU, з наступним його інтегруванням блоком БІ для одержання u.
У якості нечітких перемінних розглядаються наступні:
Е - сигнал помилки по кутовій швидкості, що може приймати значення: {Z1
- нульовий сигнал помилки; NS1
- невеликий негативний; NM1
- середній негативний; NB1
- великий негативний; PS1
- невеликий позитивний; РM1
- середній позитивний; РB1
- великий позитивний};
СЕ - сигнал помилки по похідній кутовій швидкості; {Z2
- нульовий сигнал по похідної помилки; NS2
- невеликий негативний; NM2
- середній негативний; NB2
- великий негативний; PS2
- невеликий позитивний; РM2
- середній позитивний; РB2
- великий позитивний};
DU - сигнал нечіткого керування, {Z3
- нульовий сигнал керування; NVS3
- дуже малий негативний; NS3
- невеликий негативний; NM3
- середній негативний; NB3
- великий негативний; PVS3
- дуже малий позитивний; РS3
- невеликий позитивний; РM3
- середній позитивний; РB3
- великий позитивний}.
Формування нечіткого висновку нейроконтролером здійснюється на підставі нечітких правил, приведених у таблиці 3.1:
| Таблиця 3.1.
|
| E
CE
|
NB1
|
NM1
|
NS1
|
Z1
|
PS1
|
PM1
|
PB1
|
| NB2
|
NB3
|
NB3
|
NB3
|
NM3
|
NS3
|
NVS3
|
Z3
|
| NM2
|
NB3
|
NB3
|
NM3
|
NS3
|
NVS3
|
Z3
|
PVS3
|
| NS2
|
NB3
|
NM3
|
NS3
|
NVS3
|
Z3
|
PVS3
|
PS3
|
| Z2
|
NM3
|
NS3
|
NVS3
|
Z3
|
PVS3
|
PS3
|
PM3
|
| PS2
|
NS3
|
NVS3
|
Z3
|
PVS3
|
PS3
|
PM3
|
PB3
|
| PM2
|
NVS3
|
Z3
|
PVS3
|
PS3
|
PM3
|
PB3
|
PB3
|
| PB2
|
Z3
|
PVS3
|
PS3
|
PM3
|
PB3
|
PB3
|
PB3
|
Правила формуються в такий спосіб:
1. якщо Е = NB1
і СE = NB2
, то DU = NB3
,
2. якщо Е = NM1
і СE = NB2
, то DU = NB3
і т.д.
Областю визначення всіх нечітких перемінних є інтервал [-1, 1] відносних значень відповідно сигналів помилки по кутовій швидкості, по похідній кутовій швидкості і по сигналі керування. Як форми функцій приналежності нечітких лінгвістичних перемінних Е, СЕ, DU розглядалися форми, приведені на рис. 3.5.
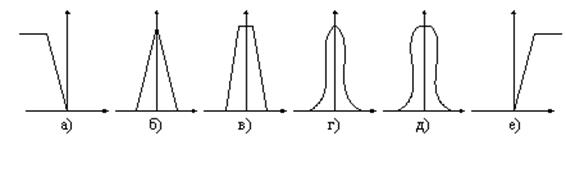
Рис. 3.5. Форми функцій приналежності.
Експерименти проводилися для різних варіантів завдання форм функцій приналежності як вхідних так і вихідний нечітких перемінних.
Спочатку обиралися однотипні форми функцій приналежності (для входу і виходу). При цьому отримали, що якщо функції приналежності описувалися формами а) - в) і е), то нечіткий нейроконтролер функціонував практично однаково, тільки якщо використовувалися функції вигляду в) (трапеціїдальні), одержали деяке перерегулювання в порівнянні з функціями вигляду б).
На рис. 3.6 приведені результати для випадку використання функцій б) і в).
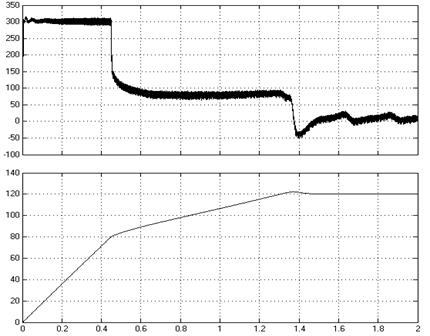
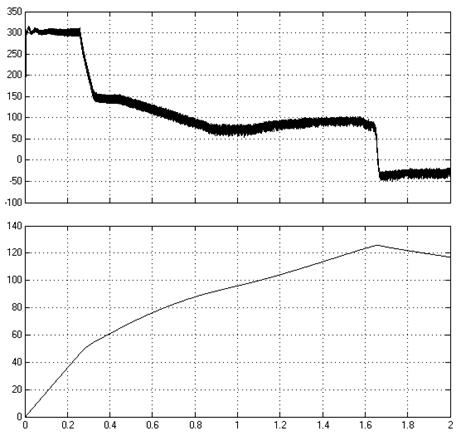
Рис. 3.6. Результати роботи нечіткого нейрорегулятора для випадків використання функцій приналежності вигляду б) (трикутні) та в) (трапеціїдальні)
При використанні функцій приналежності виду г) і д) регулятор не виконував свою основну функцію (рис. 3.7).
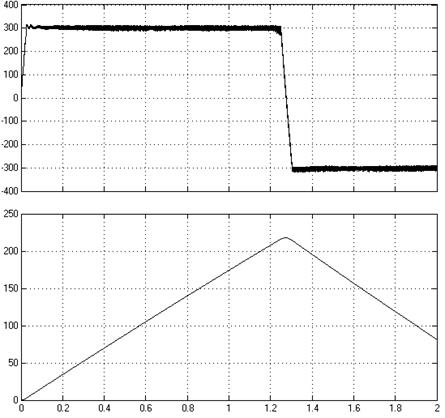
Рис. 3.7. Результати роботи нечіткого нейрорегулятора при використанні функцій приналежності вигляду г) і д) (дзвоноподібні).
Далі виконали комбінування: для вхідних змінних вибрали один тип функцій приналежності, а для вихідної - іншу. При цьому з'ясувалося, що форма функцій приналежності для вихідної величини (сигналу нечіткого керування DU) є не визначальною, тобто за якість роботи регулятора відповідає вибір форми функцій приналежності для вхідних нечітких перемінних (сигналу помилки по кутовій швидкості і сигналу помилки по похідній кутовій швидкості). На рис. 3.8 приведені залежності при використанні для входу функцій приналежності трикутної форми (виду в)), а для виходу - виду г).
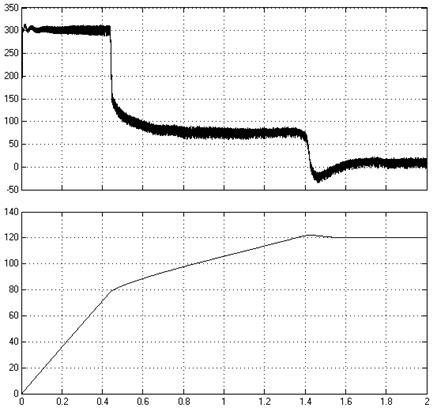
Рис. 3.8. Результати роботи нечіткого нейроконтролера при використанні для входу функцій приналежності трикутної форми (виду в)), а для виходу - виду г).
З аналізу рис. 3.8 можна побачити, що використання на виході функцій приналежності виду г) дозволяє трохи згладити форму кривої моменту, хоча графік швидкості практично залишився без змін.
Проведені дослідження дозволяють зробити висновок, що використання функцій приналежності виду г) і д) як для вхідних так і для вихідний нечіткої змінної (одночасно) не дозволяє побудувати працездатний регулятор. Визначальним є вибір функцій приналежності для вхідних нечітких перемінних. Для вхідних нечітких змінних краще обирати функції приналежності виду б) чи в), для вихідний - г) чи д).
3.3 Розробка регуляторів системи керування електропередачі дизель-потяга з використанням нейронних мереж
Система автоматичного регулювання електропередачі дизель-потяга складається з ряду аналогічних каналів регулювання, кожний з який виконує визначені функції (обмеження максимальне припустимого струму навантаження генератора, підтримка сталості потужності, обмеження максимально допустимої напруги). САР об'єкта керування являє собою структуру, що змінюється в процесі функціонування в залежності від сформованих експлуатаційних умов (режимів ведення поїзда, навантаження і т.п.), змінюються і параметри структури САР (наприклад, постійні часу задатчиків інтенсивності каналів регулювання). Відповідно до цього рішення питань, пов'язаних з розробкою регуляторів системи керування пропонується здійснити за допомогою штучних нейронних мереж.
Система автоматичного регулювання служить для формування керуючого впливу  по збудженню. Формування сигналу по збудженню. Формування сигналу  з урахуванням забезпечення динамічних показників системи здійснюється шляхом включення в контур регулювання пристроїв, що функціонують згідно визначених алгоритмів, таких як пропорційних, інтегральних, пропорційно-інтегральних чи більш складних, якщо не можна досягти заданих показників шляхом застосування одного з названих алгоритмів. У випадку застосування пропорційно-інтегрального закону керування (алгоритму) формування величини може бути здійснене на підставі співвідношення: з урахуванням забезпечення динамічних показників системи здійснюється шляхом включення в контур регулювання пристроїв, що функціонують згідно визначених алгоритмів, таких як пропорційних, інтегральних, пропорційно-інтегральних чи більш складних, якщо не можна досягти заданих показників шляхом застосування одного з названих алгоритмів. У випадку застосування пропорційно-інтегрального закону керування (алгоритму) формування величини може бути здійснене на підставі співвідношення:
 , (3.14) , (3.14)
де
 - напруга генератора; - напруга генератора;
 - коефіцієнт підсилення пропорційної складової; - коефіцієнт підсилення пропорційної складової;
 - постійна часу інтегрування; - постійна часу інтегрування;
р - оператор Лапласа.
Величина  формується з використанням блоку задавання інтенсивності, що забезпечує темп наростання відповідного сигналу в перехідному режимі: формується з використанням блоку задавання інтенсивності, що забезпечує темп наростання відповідного сигналу в перехідному режимі:
 , (3.15) , (3.15)
де  - вхідний сигнал за датчика інтенсивності; - вхідний сигнал за датчика інтенсивності;
 - постійна часу. - постійна часу.
У загальному випадку величина є нелінійною функцією, що залежить від швидкості зміни вхідного сигналу.
Зв'язок між сигналом керування і сигналом завдання на підставі рівнянь (3.14) і (3.15) описується передатною функцією виду:
 . (3.16) . (3.16)
При дослідженні САР, описуваної рівняннями (3.14) і (3.15), виходячи з виду передатної функції (3.16), з метою уточнення її структури і параметрів, у першому наближенні побудови моделі нейроконтролера, можемо скористатися передавальною функцією виду:
 , (3.17) , (3.17)
де  ; ;  ; ;  . .
Використовуючи передавальну функцію САР об'єкта керування (3.17) можемо скласти систему диференціальних рівнянь виду:
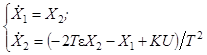 , (3.18) , (3.18)
де  - вихідний сигнал об'єкта керування (у нашому випадку - вихідний сигнал об'єкта керування (у нашому випадку  ); );
U - формований сигнал керування (у нашому випадку  ). ).
Як відзначалося вище, структура САР СГ містить три аналогічних канали, описуваних однотипними рівняннями виду (3.14) і (3.15), кожний з який включається в роботу за певних умов. До того ж, у залежності від умов експлуатації, необхідно здійснювати деяке підстроювання параметрів схем САР кожного з каналів. За умови створення моделі САР з використанням нейромережевих технологій, узагальнену структуру такої моделі можна представити у виді, зображеному на рис. 3.9.
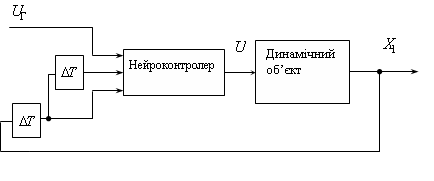
Рис.3.9 Узагальнена структура моделі САР для одного каналу.
Тут як динамічний об'єкт виступає модель СГ (модель у розділі 2.3) і його САР, описувана рівняннями (3.14) і (3.15). У якості нейроконтролера обраний перцептрон - прямо спрямована нейронна мережа. Структура нейроконтролера: три ретрансліруючих вузли на вході мережі, п'ять вузлів із сигмоїдальними активаційними функціями в схованому шарі й один вихідний нейрон, що описує зміну напруги генератора під впливом сигналу керування U. На вхідні нейрони надходить сигнал завдання  і вихідний сигнал і вихідний сигнал  , що знімається з виходу об'єкта, затриманий на один і два такти (DТ). При дослідженнях, як сигнал завдання , що знімається з виходу об'єкта, затриманий на один і два такти (DТ). При дослідженнях, як сигнал завдання  , використовувалася типова функція впливу у виді одиничного сигналу. , використовувалася типова функція впливу у виді одиничного сигналу.
Для навчання мережі використовується генетичний алгоритм (ГА), що набудовує параметри нейроконтролера не за помилкою в керуванні U, а за помилкою на виході об'єкта, порівнюючи його з виходом еталонної моделі (рис. 3.10).
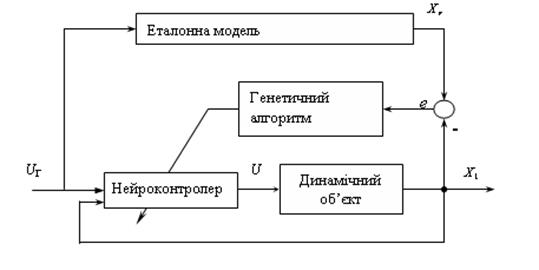
Рис. 3.10. Застосування ГА для настроювання параметрів нейроконтролера.
Вихідна популяція зі 100 хромосом генерувалася випадковим образом. Кожний з 26 параметрів мережі кодується 16 бітами, у такий спосіб хромосома, що кодує нейроконтроллер, являє собою 416 розрядну послідовність нулів і одиниць. Діапазон зміни кожного з параметрів прийнятий від -1 до +1. 16-розрядне кодування забезпечує дискретність зміни параметра не гірше ніж  . .
При одиничному вхідному впливі на об'єкт керування, описуваний системою рівнянь (3.18), якість системи оцінюється перехідною характеристикою. При визначених значеннях параметрів САР спостерігаються процеси, що відповідають хитливому характеру роботи системи, стійкому і на границі стійкості. Задача нейроконтролера - визначення параметрів САР, що забезпечують стійкість системи і необхідні показники якості, такі як величина перерегулювання, число перерегулювань і час перехідного процесу. При цьому САР у цьому випадку повинна формувати такі керуючі впливи, під впливом яких сигнал на виході об'єкта керування відповідав сигналу завдання, що формується за допомогою еталонної моделі (різниця сигналів UГ
і X1
повинна бути мінімальної).
Результати роботи нейроконтролера приведені у виді осцилограм на рис..11, 3.12.
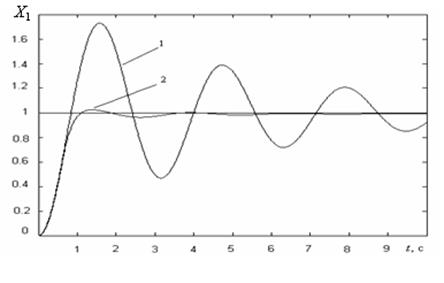
Рис. 3.11. Залежність X1
з використанням нейроконтролера та без.
На рис. 3.11. приведені перехідні процеси змінної  у відносних одиницях без використання системи керування на основі нейроконтроллера (крива 1) і з його використанням (крива 2) при завданні на вхід об'єкта сигналу одиничної амплітуди. у відносних одиницях без використання системи керування на основі нейроконтроллера (крива 1) і з його використанням (крива 2) при завданні на вхід об'єкта сигналу одиничної амплітуди.
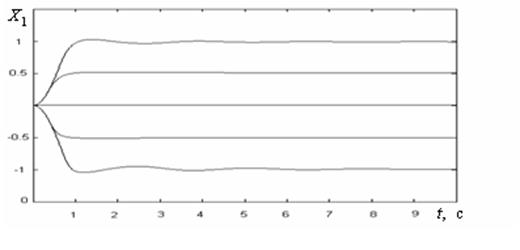
Рис. 3.12. Залежність при різних вхідних впливах.
Рис. 3.12 ілюструє поводження об'єкта не тільки на тренувальних шаблонах, але і на проміжних значеннях амплітуди вхідного сигналу, що підтверджує універсальність апроксимуючих здібностей нейронних мереж і можливість використання розробленого нейроконтролера для формування сигналів керування напругою порушення синхронного генератора електропередачі дизель-потяга.
3.4 Розробка системи керування дизель-потяга на основі нейромережевих технологій
Синтез оптимальної системи керування енергетичною системою дизель-потяга можна здійснити на основі ідей теорії рівноважних математичних моделей з використанням нейромережевих технологій. Для цього спочатку необхідно мати деяку вихідну структуру системи керування, а для одержання кращої системи необхідно синтезувати додаткову (допоміжну) систему, сукупна дія яких приводить до бажаного результату, тобто забезпечує поліпшення заданого показника якості.
Поліпшення системи керування асинхронними тяговими двигунами можна спробувати здійснити шляхом рівнобіжного включення синтезованої системи регулятора на основі нейронних мереж. Як вихідна система керування обрана одна систем, синтезована за допомогою нейронної мережі, виконана корекція синтезованого закону керування по каналах напруги і частоти. Результуючий квазіоптимальний сигнал керування U може бути отриманий як:
 , (3.19) , (3.19)
де  - сигнал, формований згідно деякого методу (наприклад, методу АКУР); - сигнал, формований згідно деякого методу (наприклад, методу АКУР);
 - додатковий сигнал, одержуваний на виході нейронної мережі. - додатковий сигнал, одержуваний на виході нейронної мережі.
Дослідження на математичних моделях показало, що система в цьому випадку має гарну стійкість, а всі змінні, які спостерігаються, знаходиться в припустимих діапазонах.
Система керування електроприводом дизель-потяга має два канали: канал формування амплітуди керуючого впливу і канал формування частоти. Тому у вихідну структуру системи керування необхідно додати дві нейронні мережі (для кожного каналу). У якості нейронних мереж обраний багатошаровий перцептрон, що має вхідний, вихідний і два схованих шари. Структура мережі ідентична для кожного з каналів: 4 входи, 4 нейрони в першому схованому шарі, 7 нейронів у другому схованому шарі і 1 вихідний нейрон. У якості активаційної функції кожного з нейронів обрана сигмоїдальна функція виду (3.33).
 . (3.20) . (3.20)
На входи мереж подаються модулі сигналів потокозчеплення і струму фази статорної обмотки, частота обертання ротора і коефіцієнт, пропорційний масі складу. На виході нейронної мережі формується додатковий сигнал  , за допомогою якого поліпшується функціонування електропривода. , за допомогою якого поліпшується функціонування електропривода.
На рис. 3.13 приведена структурна схема моделі електропривода дизель-потяга із синтезованою системою керування, що містить додаткові канали, реалізовані з використанням нейронних мереж. Дана модель характеризується тим, що в її структурі присутні два додаткових елементи - NeuralContr_W і NeuralContr_U, за допомогою яких здійснюється формування додаткових сигналів керування по каналах напруги і частоти. Структурні схеми каналу формування частоти і його основних складових компонентів приведені відповідно на рис. 3.14 і 3.15.
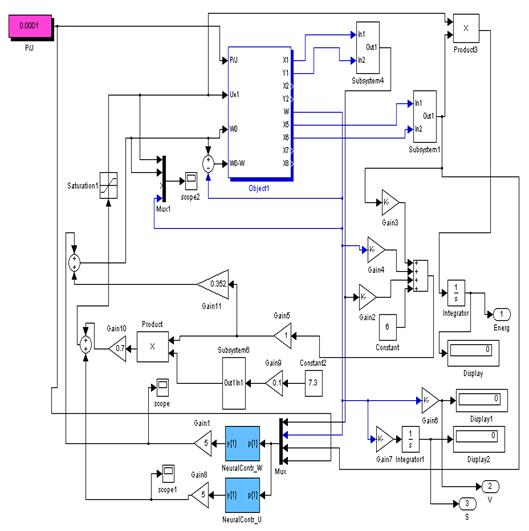
Рис. 3.13. Структурна схема моделі електропривода дизель-потяга із синтезованою системою керування, що містить додаткові канали, реалізовані з використанням нейронних мереж.
На рис. 3.14-а приведена внутрішня структура блоку NeuralContr_W. Субблоки Layer1, Layer2 і Layer3 являють собою відповідно 1-й, 2-й схований і вихідний шари нейронної мережі. Вхідні сигнали надходять на вхідний шар p{1} у виді вектора, що складає з 4-х елементів (по кількості вхідних сигналів). Далі вектор надходить на вхід першого схованого шару (Layer1). Структура субблоков сімейства Layer приведена на рис 3.14-б. Робота блоку полягає в наступному: спочатку обчислюється зважена сума вхідного вектора для кожного з нейронів першого схованого шару (блок ІW{1,1}) і додавання до цієї суми зсуву (b{1}), що являє собою вектор, число елементів якого дорівнює числу нейронів у цьому шарі. Структура блоку ІW{1,1} приведена на рис 3.15-а. Тут блоки ІW{1,1}(1,:)' - ІW{1,1}(4,:)' задають відповідно вагарні коефіцієнти між відповідним нейроном першого схованого шару (1 - 4) і вхідним шаром. На вхід блоків dotprod1 - dotprod4 подаються вхідний вектор pd{1,1} і відповідні вагарні коефіцієнти. Ці блоки виконують зважене підсумовування вхідного вектора pd{1,1}. Після додавання зсуву до зваженої суми (рис. 3.14-б), отриманий результат, що представляє собою вектор з 4-х елементів (по числу нейронів першого схованого шару), подається на активаційну функцію нейронів (блок tansіg), що реалізує функцію гіперболічного тангенса. Отриманий проміжний результат передається на другий схований шар (Layer2). Принцип роботи аналогічний описаному вище за винятком того, що число блоків dotprod, що виконують зважену підсумовування, дорівнює 7 (числу нейронів у другому схованому шарі, див .рис.3.15-б). На виході другого шару виходить вектор, що складається з 7-ми елементів, який подається на вихідний шар (Layer3). У результаті на виході нейронної мережі (вихід блоку Layer3) виходить сигнал, що здійснює корекцію сигналу керування по частоті (рис.3.15-в). Усі вагові коефіцієнти між шарами мережі і коефіцієнти зсувів були отримані в результаті настроювання мережі, що здійснювалася генетичним алгоритмом.
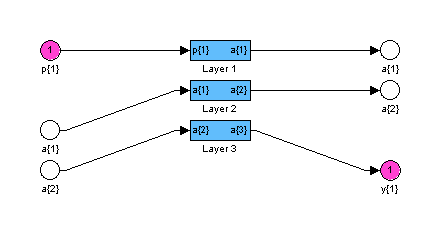
а)
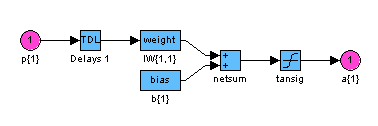
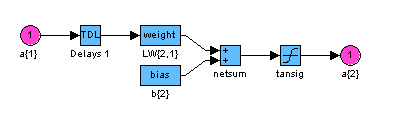
б) 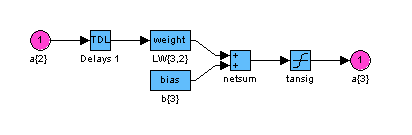
Рис. 3.14. Структурна схема моделі нейрорегулятора каналу формування частоти.

а).
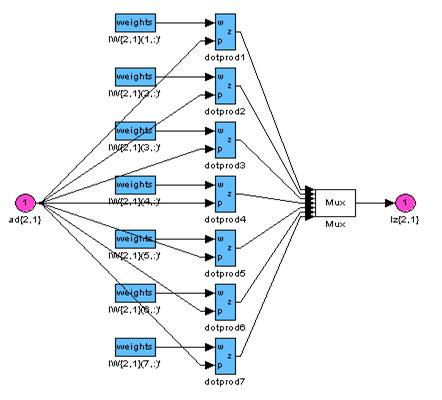
б).
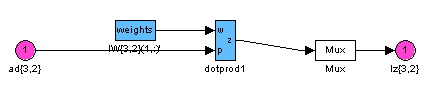
в).
Рис.3.15. Структурні схеми для визначення вагових коефіцієнтів нейрорегулятора.
Структура нейрорегулятора для каналу формування напруги аналогічна, відрізняється тільки коефіцієнтами настроювання.
При настроюванні мережі до регуляторів можна пред'являти ті чи інші оптимізаційні властивості, наприклад, при тих самих енергетичних витратах (коли нейронна мережа включена в систему керування) одержати менший час розвантажування або більший пройдений шлях, або при однакових кінцевих швидкостях зменшити енергетичні витрати на розгін дизель-потяга. Розглядаються і різні комбінації цих критеріїв.
При навчанні нейронних мереж (НМ) використовувався генетичний алгоритм (ГА). З його допомогою настроювалися параметри НМ відповідно до заданого критерію. Як гени хромосоми в ГА використовуються усі вагові коефіцієнти між шарами нейронних мереж, при цьому перша частина хромосоми являє собою параметри нейронної мережі, що виконує корекцію закону керування по частоті, а друга - по амплітуді.
На рис. 3.16 приведена узагальнена структура настроювання параметрів нейронних мереж, що входять до складу синтезованої системи керування. Вихідна популяція складалася з 150 хромосом і генерувалася випадковим образом. Кожен параметр мереж кодувався 16 бітами. Причому такі генетичні оператори як мутація і кросовер здійснювалися для кожної з двох частин хромосоми окремо. Оскільки діапазон зміни кожного з параметрів прийнятий від -1 до +1, то 16-и розрядне кодування забезпечує дискретність зміни параметрів не гірше чим  . .
Словесно алгоритм можна описати в такий спосіб: на першому етапі випадковим образом генерується похідна популяція бінарних хромосом. Обчислюється критерій функціонування системи керування без використання коригувальних нейронних мереж. Потім визначається індекс пристосованості кожної хромосоми при функціонуванні об'єкта і по його значеннях виконується впорядкування популяції. Обчислюється середня по популяції пристосованість. Спираючи на неї, визначається імовірність, з яким кожна особа, що володіє пристосованістю більше середньої, може стати батьком. При цьому для кожного батька в процесі генерації хромосоми нащадка мається дві можливості: або просто бути скопійованим у наступне покоління, або піддадуться впливу генетичних операторів.
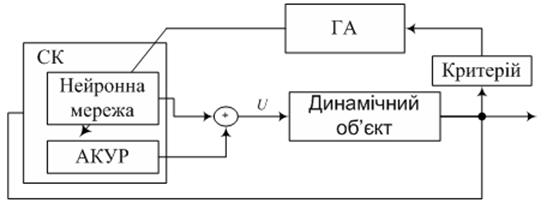
Рис.3.16. Узагальнена структура настроювання параметрів нейронних мереж системи керування.
У такий спосіб генерується задане число М нащадків. Оскільки нащадки отримані від кращих батьків, то їхня пристосованість може бути більш високої.
Робота алгоритму закінчується при досягненні популяцією стану адаптації, що ідентифікується по стягуванню ядра популяції спочатку в щільну хмару, а потім у крапку. Кросовер як механізм мінливості втрачає в таких умовах свою силу. Мутація й інверсія будуть як і раніш модифікувати потомство, продовжуючи тестування нових і нових точок простору пошуку. У результаті знаходимо деякий екстремум, хоча характер його невідомий.
На рис. 3.17 представлена спрощена схема генетичного алгоритму.
Результати досліджень приведені в розділі 4.
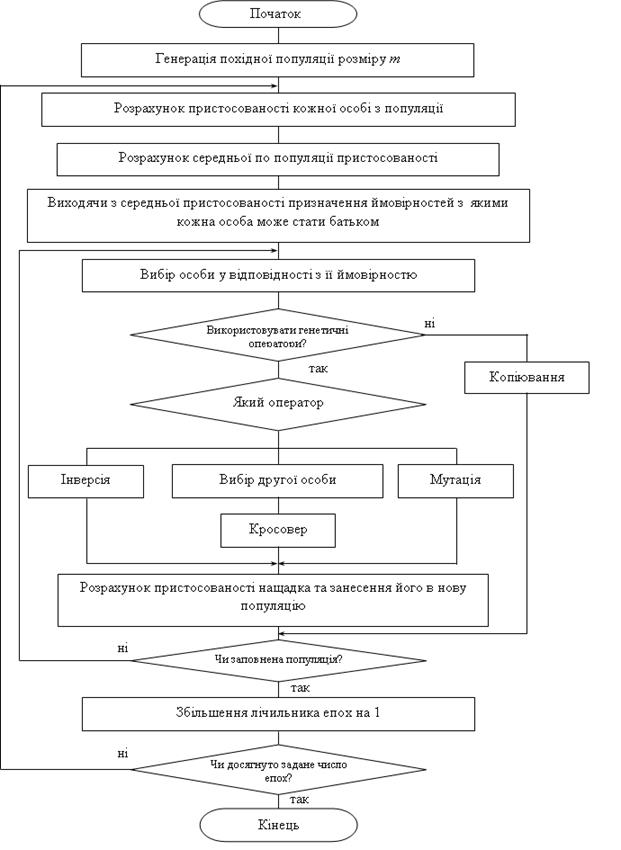
Рис.3.17. Схема генетичного алгоритму.
4. ДОСЛІДЖЕННЯ СИСТЕМ КЕРУВАННЯ ДИЗЕЛЬ-ПОТЯГА
4.1. Дослідження регуляторів системи керування, розроблених на основі використання принципу регулювання за помилкою та ПІД закону керування
У розділі 2 приведені математична модель і структура САР електропередачі дизель-потяга, виконаних у відповідності до традиційних підходів на основі використання принципу регулювання за помилкою, тобто компенсація сигналу завдання сигналом зворотного зв'язку. Як правило, такі САР будуються з використанням пропорційно-інтегрально-диференціального закону керування, де в колі регулювання міститься блок задавання інтенсивності, що у залежності від сигналу, що надходить на його, (зростання чи убування) має різні постійні часу.
Одна з можливих структур САР електропередачі містить три контури регулювання: підтримка сталості струму (для заданої позиції контролера машиніста); підтримка сталості потужності; обмеження максимального значення напруги живлення. Усі ці контури з погляду реалізації САР ідентичні, однак функціонують у різних, з погляду динаміки, умовах. Найбільш критичним до зміни умов функціонування є контур САР, що забезпечує підтримку сталості струму (обмеження струму), оскільки його робота пов'язана з режимом пуску, де до якісних показників системи пред'являються досить "жорсткі" вимоги. Особливо це відноситься до такого показника якості, як величина перерегулювання. У якості фізичної досліджуваної величини тут виступає струм фази асинхронного двигуна, що комутується перетворювачем частоти, який має гранично допустимі значення сили струму, що протікає через його елементи.
Дослідження, пов'язані з визначенням параметрів САР і уточненням структури САР, проводилися в кілька етапів. При цьому досліджувану структуру САР можна представити як таку, що складається з кола задавання, формувача сигналу керування (пропорційно-інтегрального регулятора і блоку задавання інтенсивності), об'єкта керування (моделі тягового асинхронного двигуна), блоку формування сигналу зворотного зв'язку (датчики, підсилювачі, що масштабують, фільтри) [30].
За допомогою блоку завдання формувався сигнал, що відповідає визначеній позиції контролера машиніста і характеризується визначеною швидкістю його наростання.
Тут і надалі , як показник завантаженості складу (тобто його загальної маси чи моменту інерції) використовувався показник p/J,
де р - число пар полюсів асинхронного двигуна,
J - момент інерції поїзду, приведений до колісної пари.
На першому етапі проводилися дослідження САР з метою визначення параметрів регулятора каналу відсічення по струму, виконаного відповідно до традиційної схеми, описаної в розділі 2. Основна увага приділялася питанням, зв'язаним з адекватністю розроблених моделей і визначенням параметрів САР, що забезпечують задану якість регулювання. При цьому показниками якості виступали величина перерегулювання, час перехідного процесу (tпп
), число перерегулювання (N).
Для проведення досліджень з метою уточнення структури і визначення параметрів САР необхідно мати моделі блоків САР (формувачів сигналу задавання, формувачів сигналів зворотних зв'язків, тягових двигунів), які адекватно відображають процеси, що протікають у самому об'єкті керування. При цьому, як було відзначено в розділі 2, при розробці структури САР доцільно на першому етапі використовувати спрощену схему моделі ТАД, за допомогою якої може бути зроблене уточнення структури й оцінка параметрів САР з погляду стійкості роботи і визначення припустимих границь зміни параметрів, а на другому - повну модель, що описує перехідні процеси ТАД, наприклад на підставі системи диференціальних рівнянь в рухомій системі координат.
Оскільки одержання спрощених моделей ТАД і їхнього дослідження приведено в другому розділі, то тут приділяється увага тільки адекватності моделі ТАД, представленої системою диференціальних рівнянь в рухомій системі координат.
Адекватність моделі ТАД доводиться за допомогою деякої інтегральної оцінки функціонування всієї системи при розгоні дизель-потяга й аналізу отриманих при цьому інтегральних характеристик (швидкості руху, величини ковзання) щодо теоретичних передумов.
На рис 4.1 - 4.3 приведені процеси розгону дизель-потяга при різних темпах наростання напруги живлення ТАД. При одній і тій же завантаженості складу (p/J = 0.0001) і законі керування U/f = 10.
Тут: 1 - крива, що відповідає напрузі живлення (U, B) ТАД у визначений момент часу;
2 - електрична кутова частота живлення (w0
, 1/сек) ТАД;
3 - електрична кутова частота обертання ротора (w , 1/сек) ТАД.
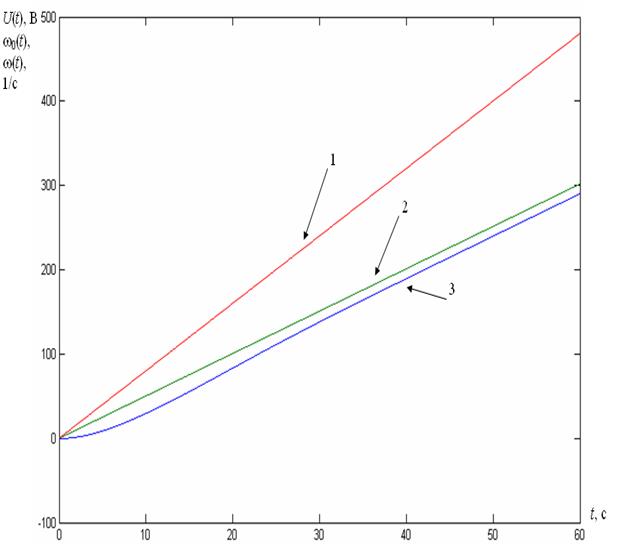
Рис. 4.1. Процеси розгону дизель-потягу при наступних параметрах:
p/J = 0.0001; U/f = 10; темп нарощування напруги живлення ТАД – 8 B/сек.
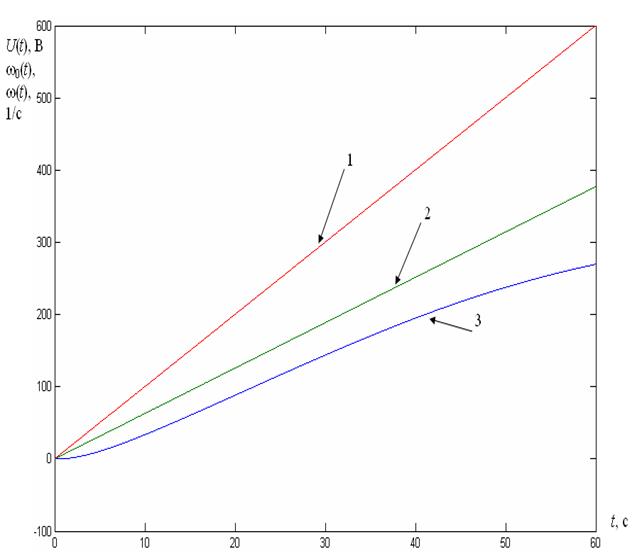
Рис. 4.2. Процеси розгону дизель-потягу при наступних параметрах:
p/J = 0.0001; U/f = 10; темп нарощування напруги живлення ТАД – 10 B/сек.
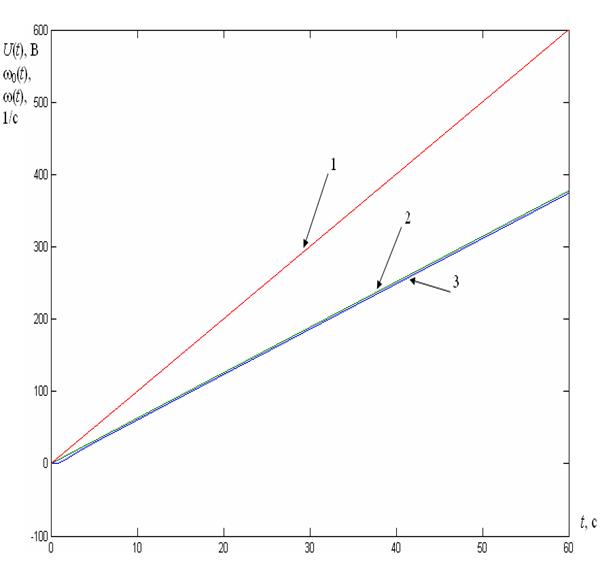
Рис. 4.3. Процеси розгону дизель-потягу при наступних параметрах:
p/J = 0.0005; U/f = 10; темп нарощування напруги живлення ТАД – 10 B/сек.
Як випливає з рис. 4.1 при даному темпі наростання напруги живлення ТАД і законі керування напругою і частотою процес розгону протікає нормально, на що вказує така узагальнена характеристика, як ковзання, яка у даному випадку знаходиться в межах від 2 Гц до 3,5 Гц, що відповідає теоретичним передумовам. У випадку зменшення темпу наростання напруги живлення, наприклад до величини 5 B/сек, процес розгону протікає нормально, але з меншим значенням величини ковзання (від 1 Гц до 2 Гц), що не суперечить теоретичним передумовам.
При збільшенні темпу наростання напруги живлення ТАД до величини 10 B/сек - процес розгону протікає не нормально (рис. 4.2), на що вказує величина ковзання (досягає величини 16 Гц, що не природно). Якщо ж зменшити масу складу, наприклад як у нашому випадку, у 5 разів (p/J = 0.0005), що близько до роботи тягових двигунів у режимі неробочого ходу (див. рис. 4.3), то розгін протікає практично при ковзанні близькому до нульового значення, що характерно для роботи ТАД у такому режимі. Збільшення темпу наростання напруги живлення ТАД (наприклад, 12 B/сек) при p/J = 0.0005 не вносить істотних змін у процес розгону, тобто розгін здійснюється при ковзанні близькому до нульового значення.
Проведені дослідження з моделлю об'єкта керування, тобто моделлю ТАД, представленою системою диференціальних рівнянь в обертовій системі координат указують на те, що модель адекватно відображує процеси, що відбуваються при розгоні дизель-потяга, адекватно реагує на зміну факторів, що збуджують, і законів керування, дає можливість установити можливий (робочий) діапазон зміни значень темпу зміни сигналів керування напругою і частотою. Це дозволяє використовувати дану модель об'єкта керування як для уточнення структури САР електропередачі, так і визначення її параметрів згідно вимог, обумовлених до якісних показників перехідного процесу.
Наступні дослідження даного підрозділу спрямовані безпосередньо на уточнення структури САР і визначення її параметрів.
Вихідна структура моделі САР каналу відсічення по струму приведена на рис. 4.4.
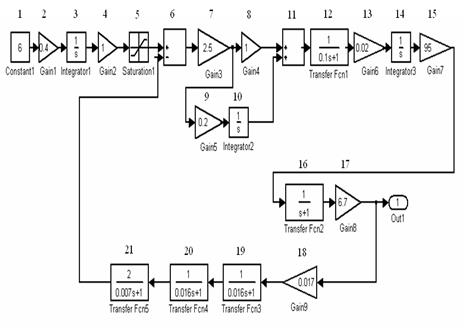
Рис. 4.4. Структура моделі САР каналу відсічення по струму.
Тут: блоки (1-5) - модель формування сигналу задавання по струму; блоки (6-11) - модель регулятора на основі пропорційно-інтегрального закону керування; блок (12) - фільтр; блоки (13, 14) - модель блоку задавання інтенсивності (без обліку завдання різних постійних часу в залежності від зміни вхідного сигналу); блоки (15 - 17) - модель об'єкта керування (формування струму фази ТАД); блоки (18 - 21) - модель пристроїв узгодження і фільтруючих ланок, використовувані в ланцюзі зворотного зв'язку САР.
На рис. (4.5 - 4.8) приведені перехідні процеси, що відповідають току ТАД, при зміні одного з параметрів (коефіцієнта підсилення) САР. Відповідність процесів, параметрів і рисунків приведено в таблиці 4.1.
Таблиця 4.1. Результати досліджень
| №
|
K1
|
K2
|
K3
|
K4
|
Номер рис.
|
Dmin
, сек
|
tmin
, сек
|
Nmin
|
| 1
|
2,5
|
1
|
0,2; 0,3; 0,4; 0,5; 0,6
|
0,2
|
Рис. 4.6
|
29,78
|
20
|
4
|
| 2
|
2,5
|
1
|
0,2
|
0,02; 0,03; 0,04; 0,05; 0,06
|
Рис. 4.7
|
25,28
|
45
|
8
|
| 3
|
2,5
|
1
|
0,2
|
0,02; 0,03; 0,04; 0,05; 0,1
|
Рис. 4.8
|
13,2
|
>50
|
>20
|
| 4
|
2,5
|
1
|
0,2
|
0,15
|
Рис. 4.9
|
Процес не сталий
|
Процеси, що відповідають параметрам, зазначеним у таблиці 4.1 і рис. 4.5, дають можливість оцінити якісні показники перехідного процесу. Найменше значення як величини перерегулювання Dmin
, так і часу регулювання (tmin
) і числа перерегулювання (Nmin
) при значенні K3
= 0,2. Числові дані цих показників приведені в таблиці 4.1.
На рис. 4.6 приведені аналогічні процеси, але при зміні коефіцієнта підсилення K4
(блок задавання інтенсивності). Тут, як видно з процесів, представлених на даному рисунку, постійні часу блоку задавання інтенсивності (Тmin
=16,6 сек, Тmах
=50 сек) істотного впливу на величину перерегулювання не роблять, однак зі зменшенням постійної часу (збільшенням значення K4
) збільшується швидкодія системи, що дуже важливо, однак збільшується коливальність (час перехідного процесу і число коливань).
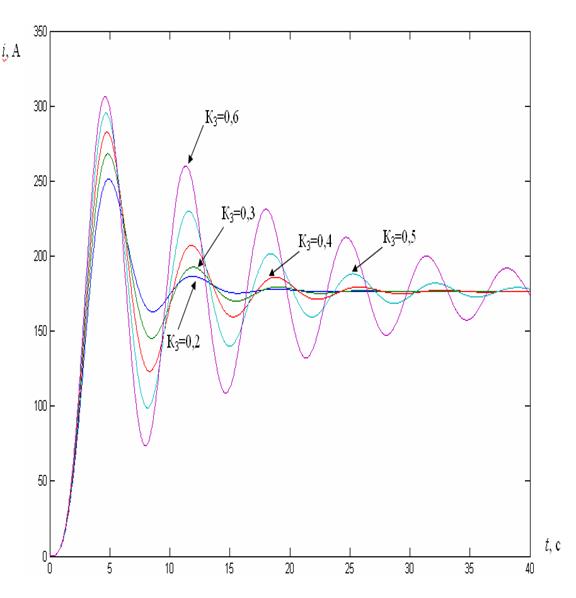
Рис. 4.5. Залежності струмів ТАД при зміні коефіцієнта K3.
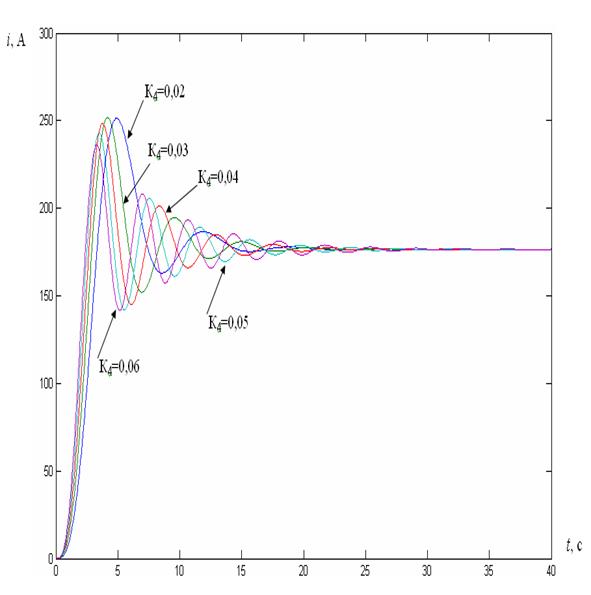
Рис. 4.6. Залежності струмів ТАД при зміні коефіцієнта K4.
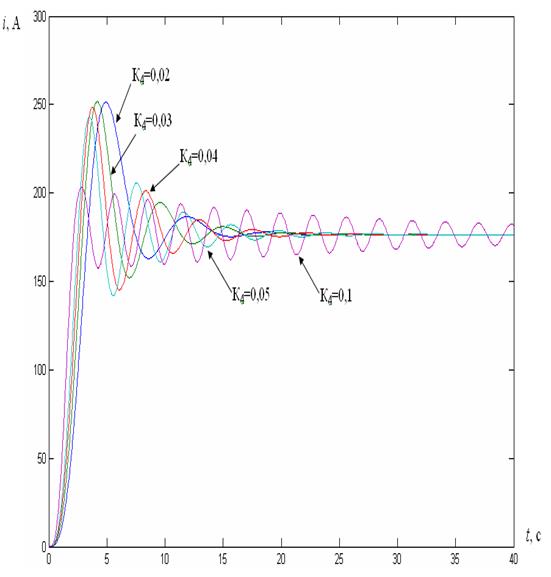
Рис. 4.7. Залежності струмів ТАД при зміні коефіцієнта K4
(при максимальному K4
=0,1).
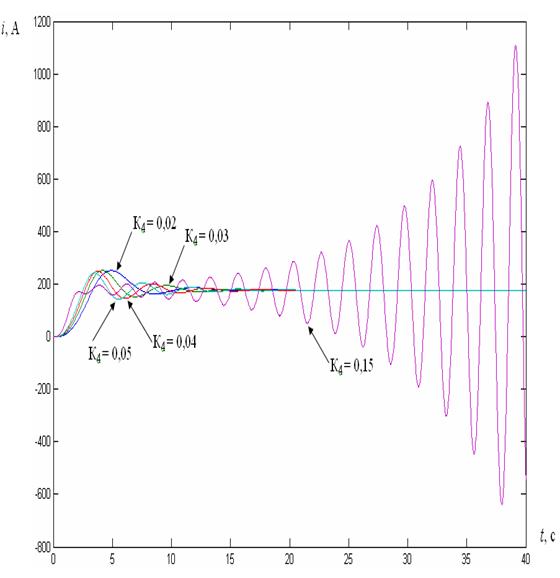
Рис. 4.8. Залежності струмів ТАД при зміні коефіцієнта K4
(процес не стійкий).
На рис. 4.7 і рис. 4.8 приведені процеси, що дозволяють оцінити критичне значення K4
, при якому система стає хитливою. При K4
= 0,1 - практично на границі стійкості, при K4
= 0,15 - не стійка.
Проведені експерименти з моделлю дозволяють установити для даної структури САР, обумовленою її моделлю (див. рис. 4.4), оптимальні значення параметрів з урахуванням близькості до необхідних показників якості перехідного процесу.
Оптимальні значення цих параметрів наступні: K1
= 2,5; K2
= 1; K3
= 0,2; K4
= 0,02.
Однак значення величини перерегулювання дорівнює 29,78 %; час перехідного процесу - 20 сек; число перерегулювання - 4. Два останніх показники задовольняють необхідним умовам до вимог до якісних показників перехідного процесу, перший - не задовольняє. Тому необхідно в структуру САР увести блок задавання інтенсивності зі змінною структурою.
Результати досліджень, приведені на рис. 4.9 і рис. 4.10, характеризують протікання перехідних процесів за умови введення в системи САР блоку задавання інтенсивності зі змінною структурою, тобто , у якого параметри (постійна часу) при зростанні й убуванні вхідного сигналу - різні.
Перехідні процеси, приведені на рис. 4.9 відповідають:
- при убуванні - К = 0,02 (Т = 50 сек);
- при зростанні - 1 (К = 0,02); 2 (К = 0,04); 3 (К= 0,06); 4 (К= 0,08); 5 (К= 0,1).
Тут, на відміну від структури блоку задавання інтенсивності, у якого параметри на "накидання" і "скидання" не змінювалися і це приводило до нестійкості при постійної часі, рівній 12,5 сек, то в даному випадку така структура поліпшує систему САР і з погляду стійкості, і з погляду якісних показників. Навіть зменшення постійної часу до 10 секунд не призводить до хитливої роботи (рис. 4.10).
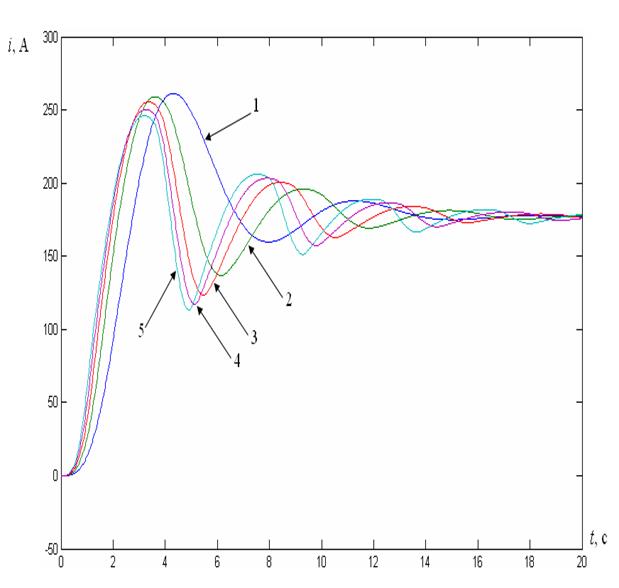
Рис. 4.9. Перехідні процеси в системі за умови введення блоку задавання інтенсивності
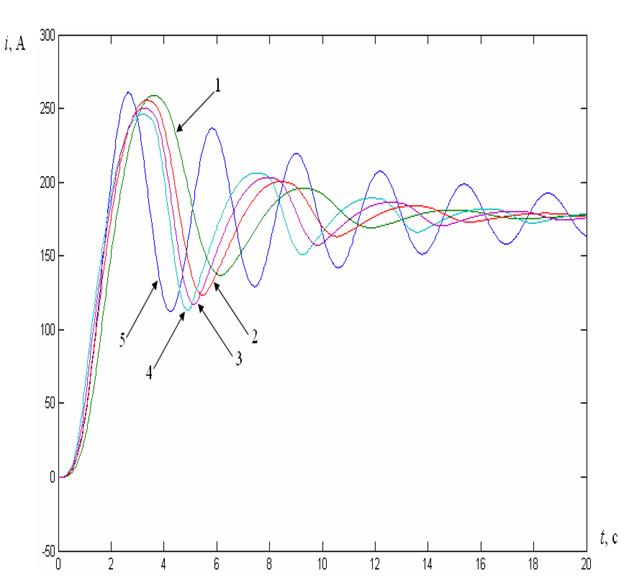
Рис. 4.10. Перехідні процеси в системі за умови введення блоку задавання інтенсивності.
Однак істотної зміни (зменшення) величини перерегулювання з уведенням блоку задавання інтенсивності зі змінною структурою домогтися не вдалося, хоча позитивний ефект мається в змісті забезпечення стійкості системи при збільшенні швидкодії (тобто робота блоку задавання інтенсивності зі значно меншими значеннями постійних часу). При цьому встановлено, що прийнятні значення з погляду забезпечення якісних показників відповідають: при "накиданні" - Т = 12,5 секунд; при "скиданні" - Т = 50 секунд.
Структурна схема моделі для реалізації блоку задавання інтенсивності зі змінною структурою приведена на рис 4.11. Тут же зазначені і параметри настроювання моделі.
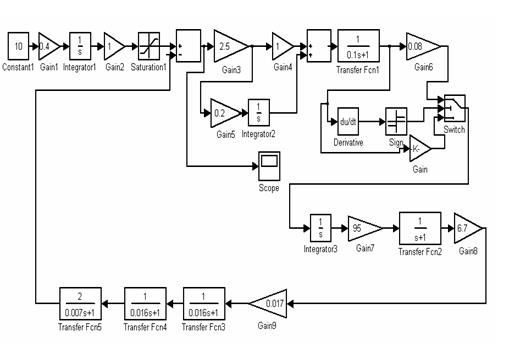
Рис. 4.11. Структурна схема моделі для реалізації блоку задавання інтенсивності зі змінною структурою.
На рис. 4.12 приведені процеси, що характеризують роботу САР з використанням блоку задавання інтенсивності зі змінною структурою і коригувальної ланки у виді зони нечутливості.

Рис. 4.12. Процеси, які характеризують роботу САР з урахуванням блоку задавання інтенсивності зі змінною структурою та коригувальної ланки.
Тут: 1 - процес, що відповідає САР з використанням блоку задавання інтенсивності з незмінною структурою;
2 - із блоком задавання інтенсивності незмінної структури і коригувальної ланки у виді зони нечутливості;
3 - із блоком задавання інтенсивності змінної структури і коригувальної ланки у виді зони нечутливості.
При заданих параметрах механічної частини електропривода, параметри САР, що забезпечують необхідні показники якості наступні: K1
= 2,5; K2
= 1; K3
= 0,2; K4
(накидання Т = 12,5 сек; скидання Т = 50 сек). Поріг зони нечутливості - (+/- 10,5 В). САР, відповідно до даної моделі, забезпечує функціонування системи з наступними показниками якості перехідного процесу: величина перерегулювання - не більш 6 %; час перехідного процесу - не більш 14 секунд; число перерегулювання - 3, що є цілком припустимим при технічній реалізації САР.
4.2 Дослідження регуляторів системи керування, розроблених на основі використання методів нечіткої логіки і нейромережевих технологій
Результати моделювання системи керування електроприводом, що містить тягові асинхронні двигуни з використанням стандартного ПІ регулятора і побудованого з використанням нечіткої логіки в середовищі MATLAB відповідно показані на рис. 4.13 і рис. 4.14. Верхній графік залежність електромагнітного моменту від часу M(t), нижній - швидкості обертання ротора двигуна від часу (t).
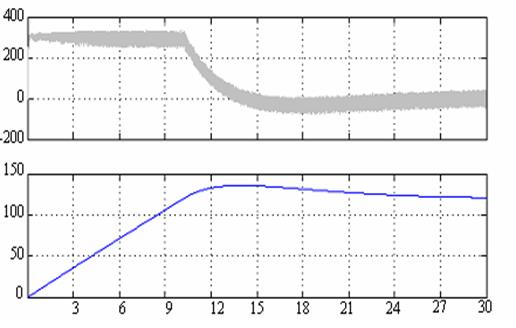
Рис. 4.13. Залежності M(t),  ( стандартний ПІ-регулятор) ( стандартний ПІ-регулятор)
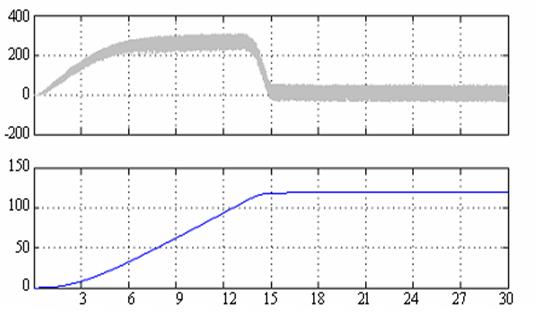
Рис. 4.14. Залежності M(t),  (ПІ-регулятор з використанням нечіткої логіки) (ПІ-регулятор з використанням нечіткої логіки)
Проведені дослідження синтезованої системи векторного керування тяговим електроприводом підтвердили ефективність застосування методів нечіткої логіки при проектуванні регуляторів. Перерегулювання у випадку використання стандартного ПІ контролера, що спостерігається на рис. 4.13, складає 14%, при використанні нечіткого контролера перерегулювання практично відсутнє. До того ж, у першому випадку, у перехідному режимі двигун електропривода може перейти в генераторний режим, що не припустимо в процесі функціонування системи.
На рис. 4.15 представлені криві зміни амплітуди і частоти, як сигналів керування, для похідної (базової) моделі системи керування (криві 1 і 3) і моделі з використанням нейронних мереж (криві 2 і 4) при одній і тій же навантаженості складу (Р/J = 0.0001).
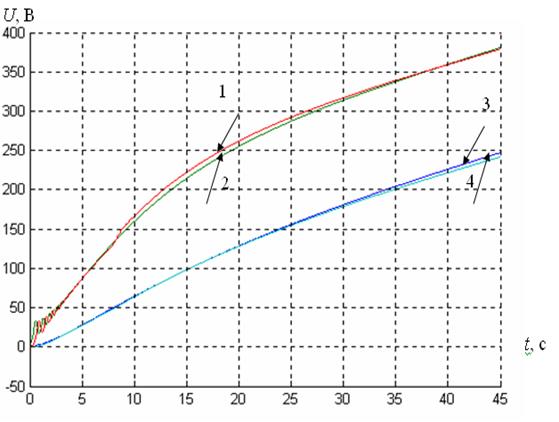
Рис. 4.15. Залежності U(t).
На рис. 4.16 представлені криві зміни модулів струмів для похідної (базової) моделі системи керування (крива 1) і моделі з використанням нейронних мереж (крива 2) за тих самих умов руху.
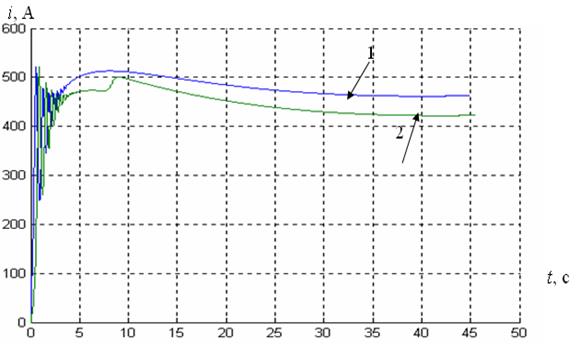
Рис. 4.16. Залежності i(t).
Як критерій оптимальності використовувався критерій мінімуму енергетичних витрат при виконанні обмежень по величині пройденого шляху і швидкості в кінцевий момент часу. Розглядалися різні режими роботи електропривода, зокрема , розгін дизель-потяга за заданий час t і оцінювалися отримані характеристики (швидкість, пройдений шлях і енергетичні витрати) у кінцевий момент часу. Отримані результати (швидкість у кінцевий момент часу, пройдений шлях і енергетичні витрати) для різних мас складу (другий стовпець таблиці, задається через відношення числа пара полюсів Р к моменту інерції J) представлені в таблиці 4.2.
У першому рядку таблиці приведені результати розгону дизель-потяга за час 45секунд до швидкості 38,16 м/с без використання НС, при цьому енергетичні витрати склали 5255 кВт/год, а пройдений шлях 255,3 м. При включенні в систему керування нейронних мереж отриманий виграш по енергетичних витратах 4,5%, хоча кінцева швидкість у даному випадку виявилася меншої на 0,55 м/с. Однак при збільшенні завантаженості складу (рядок 3) отримані енергетичні витрати на 3,2% менше при практично рівних кінцевих швидкостях і пройдених шляхах.
Таблиця 4.2. Результати досліджень.
| №
|
p/J
|
t, с
|
V, км/г
|
S, м
|
Е, кВт/г
|
| 1
|
2
|
1
|
2
|
1
|
2
|
| 1
|
0,0001
|
45
|
38,16
|
37,61
|
255,3
|
257,1
|
5255
|
5014
|
| 2
|
0,0002
|
30
|
69,92
|
68,93
|
298,8
|
305,7
|
8755
|
8351
|
| 3
|
0,00009
|
30
|
24,27
|
24,12
|
103,4
|
103,9
|
2416
|
2337
|
| 4
|
0,0001
|
45
|
38,16
|
40,06
|
255,3
|
259,2
|
5255
|
5251
|
| 5
|
0,0002
|
30
|
69,92
|
72,44
|
298,8
|
302,6
|
8755
|
8759
|
| 6
|
0,00009
|
30
|
24,27
|
26,31
|
103,4
|
104,2
|
2416
|
2422
|
| 7
|
0,0001
|
40
|
32,54
|
32,61
|
234,2
|
243,5
|
4762
|
4621
|
| 8
|
0,0002
|
35
|
75,53
|
75,51
|
324,3
|
335,2
|
9867
|
9754
|
| 9
|
0,00009
|
30
|
24,27
|
24,32
|
103,4
|
110,6
|
2416
|
2384
|
У рядках 4 - 6 таблиці 4.2 представлені результати розгону дизель-потяга за час t. У цьому випадку використовувався критерій: одержати велику кінцеву швидкість при однакових енергетичних витратах. У рядках 7-9 критерієм було одержати більший пройдений шлях при менших енергетичних витратах.
Виходячи з проведених результатів дослідження, можна зробити висновок, що введення нейронних мереж до складу системи керування дозволяє оптимізувати роботу енергетичної системи дизель-потяга в процесі розгону, забезпечуючи при цьому виконання заданих граничних умов. При цьому економія по енергетичних витратах складає не менш 3,2% у порівнянні з досліджуваним експериментальним зразком системи керування дизель-потяга.
5. ЕКОНОМІЧНА ОЦІНКА Й ОБГРУНТУВАННЯ.
Резюме
Проведене аналітичне дослідження присвячено трьом видам систем керування електроприводом дизель-потягу з асинхронними тяговими двигунами: стандартній системі керування на основі ПІ-регулятору, системі керування на основі нечіткого нейроконтролеру та системі з використанням нейронних мереж. Дана робота являє собою інтерес з точки зору можливого використання інформації, підібраній та розглянутій в ній, та отриманих результатів проектування та моделювання на підприємствах, що спеціалізуються на проектуванні та виготовленні рухомого складу, в НДІ, лабораторіях та ін.
Аналітичне дослідження, проведене в дипломній роботі, є об’єктом інтелектуальної власності та представлене у вигляді комплексу моделей досліджуваних об’єктів(у форматі робочих файлів для проведення моделювання в пакеті Matlab) та технічної документації, що містить теоретичні відомості й обґрунтування, принципові та структурні схеми досліджуваних систем керування та результати проведеного моделювання їхньої роботи.
Швидкість проведення моделювання залежить від заданих користувачем параметрів.
Витрати на проведення дослідження складають 33069 грн.
5.1 Опис розробленого продукту
Дослідницька робота, що пропонується як об’єкт інтелектуальної власності надає інформацію про:
1) Сучасні світові тенденції у вирішенні задач у даній галузі;
2) Математичні моделі досліджуваних об’єктів;
3) Структурні та принципові схеми розглянутих систем керування;
4) Результати моделювання та отримані характеристики даних об’єктів.
Окрім того, дана робота дає можливість провести моделювання власноруч – до документації докладається комплекс готових схем для дослідження в пакеті Matlab. Мінімальні вимоги до ПЕОМ складають:
1) Операційна система:
- Microsoft Windows 98 (original and Second Edition), Windows Millennium Edition (ME), Windows NT 4.0 (Service Pack 5, Service Pack 6a), Windows 2000 (Service Packs 1 or 2), or Windows XP
2) процесор
- Pentium, Pentium Pro, Pentium II, Pentium III, Pentium IV, Xeon
або AMD Athlon, Athlon XP based personal computer
3) оперативна пам’ять
- 128 MB RAM minimum, 256 MB RAM recommended
4) мінімальний вільний дисковий простір
120 MB for MATLAB only and 260 MB for MATLAB with online help files.
5) CD-ROM (для інсталяції).
Час моделювання залежить від того, які параметри моделювання задані(точність, елементна база та ін.) та може бути зменшений використанням комп’ютеру з більшими обчислювальними можливостями.
5.2 Оцінка ринку збуту
Інформація, представлена у даній роботі, призначена для використання в машинобудівельній галузі промисловості, яка спеціалізується на транспортному машинобудівництві. Діапазон застосування досидь широкий: результати дослідження та теоретичні питання, розглянуті в роботі, можуть бути корисними для проектування та виробництва як рухомого складу в цілому (міського перевезення, дальнього та приміського сполучення) так і його складових частин. Це можна пояснити актуальністю питань як для промислового застосування(на даний момент в Україні здані в експлуатацію лише 4 сучасні дизель-потяги) так і для подальших розробок та теоретичних досліджень.
Основними вимогами потенційних користувачів є:
1) повнота розглянутої інформації (у роботі мають бути висвітлені основні існуючі напрямки, які можуть використовуватися для розв’язання завдань подібного типу);
2) достовірність і детальність опису та структури розглянутих моделей систем керування;
3) достовірність отриманих результатів моделювання;
4) можливість самостійного моделювання зі зміною параметрів та подальших досліджень на базі готових схем.
Основним регіоном при продажу даної роботи є Луганська та Харківська області, але не виключена можливість продажу й за їхні межі.
Проведемо аналіз сегментації ринку збуту за споживачами. Дані заносимо в таблицю 5.1.
Таблиця 5.1. Аналіз ємності сегментів ринку.
| Області використання (сегменти)
|
Кількість об’єктів, що будуть використовувати продукт
|
Передбачувана кількість продажів одному об’єкту
|
Передбачувана ємність сегменту
|
| Промислові підприємства
|
4
|
1
|
4
|
| Лабораторії
|
5
|
1
|
5
|
| Галузеві НДІ
|
5
|
1
|
5
|
| ВНЗ
|
6
|
1
|
6
|
| Загалом ємність ринку:
|
20
|
20
|
Прогнозовані об’єми продажів приведені в таблиці 5.2.
Таблиця 5.2. Прогноз об’ємів продажу.
| Періоди
|
Об’єм реалізації
|
| Для першого року реалізації
|
| Січень
|
1
|
| Лютий
|
| Березень
|
1
|
| Квітень
|
| Травень
|
| Червень
|
| Липень
|
1
|
| Серпень
|
1
|
| Вересень
|
| Жовтень
|
| Листопад
|
| Грудень
|
1
|
| Загалом:
|
5
|
| Для другого року реалізації
|
| I кв.
|
2
|
| II кв.
|
2
|
| III кв.
|
1
|
| IV кв.
|
2
|
| Загалом:
|
7
|
| Для третього року реалізації
|
| Загалом за рік
|
6
|
5.3 Конкуренція
По даним, якими володіють розробники, дане дослідження не має повних аналогів, але існують дослідження, що висвітлюють частини питань, розглянутій у даній. Промислові підприємства, що займаються серійним випуском рухомого складу, зазвичай, не ведуть власних наукових розробок та досліджень, замовляючи їх НДІ, лабораторіям та ВУЗам. Перелічені науково-дослідницькі заклади мають ряд подібних робіт, але вони не є повними, бо в них приділяється увага окремим методам вирішення виключних(часто одиничних) задач.
На відміну від вищезгаданих, дана робота поєднує в собі інформацію про всі основні види систем керування, які можуть бути застосовані в дизель-потязі, дозволяє провести розгорнутий порівняльних аналіз та обрати саме той тип системи керування, використання якого максимально доцільно в зв’язку з поставленими задачами.
5.4 Стратегія маркетингу
Схема розповсюдження матиме наступний вигляд: розповсюдження організацією-посередником, але й не виключається можливість розповсюдження автором роботи.
Розрахуємо витрати на науково-дослідницьку роботу, проведену для написання продукту. Ці витрати визначаємо на основі підрахунку трудомісткості виконаних робіт: дослідження опису завдання та його постановка; проведення аналізу літератури, присвяченої даним питанням; побудова математичних моделей розглянутих об’єктів; створення схем систем керування; проведення моделювання, отримання та аналіз значень основних досліджуваних характеристик; складання документації.
Трудомісткість на НДР розраховується о формулі:
Т= Тоф
+ Та
+ Тмм
+ Тс
+ Тм
+Тд
, (5.1)
де Тоф
– трудовитрати на дослідження опису завдання та формулювання його постановки;
Та
– трудовитрати на проведення аналізу існуючої літератури на задану тематику;
Тмм
– трудовитрати на побудову математичних моделей;
Тс
– трудовитрати на побудову структурних та принципових схем;
Тм
– трудовитрати на моделювання та аналіз отриманих характеристик;
Тд
– трудовитрати на оформлення документації.
Трудовитрати всіх видів визначаються через умовну кількість дій(Q), виконуваних при проведенні дослідження, яка обчислюється за формулою:
 , (5.2) , (5.2)
де q – передбачувана кількість сторінок документації;
K – коефіцієнт складності розробки;
p – коефіцієнт корекції роботи;
n – кількість корекцій.
У даній роботі кількість сторінок – 100. Моделювання проводиться в реальному режимі часу, коефіцієнт складності K=1,5. Було проведено 4 корекції, з них одна з коефіцієнтом 0.8 і три – з коефіцієнтом 0.6.
Таким чином Q = 540 (умовних дій).
Трудомісткість на вивчення опису завдання та його постановку визначається по формулі(5.3):
 , (5.3) , (5.3)
де Vоф
– індекс продуктивності виконавця(дій/годину);
Ккв
– коефіцієнт кваліфікації виконавця (приймаємо рівним 1.4);
g – коефіцієнт, що враховує якість опису (приймаємо рівним 1).
Трудовитрати на всі інші види робіт розраховується по формулі:
 , (5.4) , (5.4)
де i - вид робіт;
Vi
– продуктивність виконавця для і-го виду робіт.
Дані продуктивності виконавця приведені в таблиці 5.3.
Таблиця 5.3. Дані продуктивності виконавця.
| Вид робіт
|
Продуктивність, дій/годину
|
| Дослідження опису завдання та формулювання його постановки
|
10
|
| Проведення аналізу існуючої літератури на задану тематику
|
8
|
| Побудова математичних моделей
|
4
|
| Побудову структурних та принципових схем
|
4
|
| Моделювання та аналіз отриманих характеристик
|
6
|
| Оформлення документації
|
8
|
Розрахунок трудовитрат, виконаний у відповідності до цих даних, приведений у таблиці 5.4.
Таблиця 5.4. Розрахунок трудовитрат.
| Вид робіт
|
Розрахована кількість трудоднів
|
| Дослідження опису завдання та формулювання його постановки
|
Тоф
= 4.82
|
| Проведення аналізу існуючої літератури на задану тематику
|
Та
=6.027
|
| Побудова математичних моделей
|
Тмм
=12.054
|
| Побудову структурних схем
|
Тс
=12.054
|
| Моделювання та аналіз отриманих характеристик
|
Тм
=8.036
|
| Оформлення документації
|
Тд
=6.027
|
| Загалом:
|
Т=49,018
|
Розрахуємо зарплатню дослідника:
 , (5.5) , (5.5)
де  - середньоденна зарплатня дослідника; - середньоденна зарплатня дослідника;
 , (5.6) , (5.6)
де Зміс
– місячна зарплатня дослідника (5000грн)
Ф – кількість робочих днів (22)
Таким чином
Ззп
= (5000/22)·49,018 = 11 140,45 (грн.)
Експлуатаційні витрати:
 , (5.7) , (5.7)
де Тмч
– час, необхідний для роботи за ПЕОМ
 , (5.8) , (5.8)
тут Смч
– вартість машино-години роботи на ПЕОМ ( приймаємо рівними 10грн/година, у тому числі витрати Internet);
m – витрати машинного часу на виконання однієї умовної дій (приймаємо 10хвилин).
Тмч
= 64,29(годин) Емч
= 642,9 (грн.)
Усі інші статті витрат приведені в таблиці 5.5.
Таблиця 5.5. Розрахунок витрат на проведення дослідження.
| № з/п
|
Найменування витрат
|
Сума, грн
|
| 1.
|
Зарплатня дослідника за період розробки
|
11 140,45
|
| 2.
|
Відрахування на соціальні заходи, в т.ч.
|
| а)
|
Відрахування до фонду загального обов’язкового державного соціального страхування на випадок тимчасової втрати працездатності (1,4% п.1)
|
155,96
|
| б)
|
Пенсійний фонд(33,2% п.1)
|
3698,48
|
| в)
|
Відрахування до фонду загального обов’язкового державного соціального страхування на випадок безробіття (1,6% п.1)
|
178,24
|
| г)
|
Відрахування до фонду загального обов’язкового державного соціального страхування від нещасних випадків на виробництві та професійних захворювань (0,2% п.1)
|
22,28
|
| 3.
|
Вартість машинного часу(в т.ч. Internet)
|
642,9
|
| 4.
|
Накладні витрати (50% п.1)
|
5570,25
|
| 5.
|
Вартість матеріалів
|
| а)
|
Канцтовари
|
700
|
| б)
|
Витратні матеріали(тонер, чорнила)
|
360
|
| 6.
|
Вартість ПО для проведення дослідження(MS Office, Matlab)
|
10 600
|
| Загалом Ев
:
|
33 069
|
Розрахуємо прибуток П=0,5·33069 = 16524,5
Вартість готового продукту складатиме:
Вmax
= 1,2·(Ев
+1,3·П) = 65 475,84 (грн.) (5.9)
Отримана вартість є максимальною. Однак у роботі розрахуємо ще й мінімальну вартість, що складається з витрат на тиражування та адаптацію даного продукту споживачем. Витрати на тиражування складаються з ціни носіїв(дисків), машинного часу, необхідного для створення копії, та зарплатні виконавця.
Вmin
= 1,2·(Зтир
+ Зад
+ 1,3·П), (5.10)
де Зтир
– витрати на тиражування
Зтир
= Смч
·Тк
+ Здиск
+ Звик
, (5.11)
де Тк
– час копіювання (дорівнює 1 година)
Здиск
– вартість носіїв (25грн)
Звик
– зарплатня виконавця (30 грн)
Зтир
= 70(грн.).
Зад
– витрати на адаптацію (складають 5% від витрат) = 1653,45 (грн.)
П = 0,5·(1653,45+70) = 861,75 (грн.)
Мінімальна вартість складає:
Вmin
= 1,2·(70 +1653,45 + 1,3·861,75)=3412,45 (грн.)
Виходячи з отриманих результатів встановлюємо ціну без ПДВ
Впрод
= 30 000 грн
5.5 Оцінка ризику та страхування
Для розробленого продукту, який є об’єктом інтелектуальної власності, можливі наступні види ризиків:
1) несанкціоноване копіювання з метою подальшого використання (ймовірність 50%);
2) те саме з метою продажу (з ймовірністю 10%).
Зменшити ступінь ризику можна двома способами: самострахування та страхування за допомогою страхових компаній.
Самострахування передбачає забезпечення контролю за ПЕОМ та систему захисту інформації. Засобами захисту інформації у даному випадку є:
- контроль за доступом до терміналів;
- контроль за доступом до системи та процесів її використання;
- створення архівних копій інформаційних файлів, що зберігаються на ПЕОМ.
Однак реалізація цих заходів викликає певні труднощі. Таким чином доцільно зменшити ступінь ризику за допомогою страхування, враховуючи, що сучасні страхові компанії, маючи ексклюзивні ліцензії, мають можливість проводити всі види захисту об’єктів інтелектуальної власності.
У даному випадку, скористувавшись послугами страхової компанії «Оранта», маємо розмір страхової премії у розмірі 1,5% вартості продукту, тобто 450грн в місяць.
5.6 Фінансовий план
Цей розділ бізнес-плану узагальнює матеріали попередніх розділів та представляє їх у вартісному вигляді, містить наступні документи:
1. Таблицю прибутків та витрат;
2. Графік досягнення беззбитковості.
Цьому попереджує складання карт прогнозів руху наявних грошей для 1, 2, та 3-го років реалізації. Для першого року реалізації карта прогнозів складена на кожен місяць, для другого – по кварталам, для третього – в цілому за рік. У карти прогнозів вноситься графа «Наявні гроші», яка є різницею між прибутками та сумою витрат. За допомогою цих карт будуємо таблицю доходів та витрат, а також графік беззбитковості.
Таблиця 5.6. Карта руху наявних грошей за 1-й рік реалізації.
| Доходи та витрати
|
Сума, грн
|
| I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
VIII
|
IX
|
X
|
XI
|
XII
|
Загалом
|
| Об’єм продажу
|
1
|
1
|
1
|
1
|
1
|
5
|
| Прибуток від реалізації
|
30 000
|
30 000
|
30 000
|
30 000
|
30 000
|
150 000
|
| Постійні
|
Зарплатня та податки
|
5000
|
5000
|
5000
|
5000
|
5000
|
5000
|
5000
|
5000
|
5000
|
5000
|
5000
|
5000
|
60 000
|
| Накладні витрати
|
2500
|
2500
|
2500
|
2500
|
2500
|
2500
|
2500
|
2500
|
2500
|
2500
|
2500
|
2500
|
30 000
|
| Страхові внески
|
450
|
450
|
450
|
450
|
450
|
450
|
450
|
450
|
450
|
450
|
450
|
450
|
5400
|
| Загалом:
|
7950
|
7950
|
7950
|
7950
|
7950
|
7950
|
7950
|
7950
|
7950
|
7950
|
7950
|
7950
|
95 400
|
| Змінні
|
Витрати на тиражування
|
70
|
70
|
70
|
70
|
70
|
350
|
| Податки
|
6000
|
6000
|
6000
|
6000
|
6000
|
30 000
|
| Витрати на адаптацію
|
1653
|
1653
|
1653
|
1653
|
1653
|
8265
|
| Загалом
|
7723
|
7723
|
7723
|
7723
|
7723
|
38 615
|
| Наявні гроші:
|
14327
|
-7950
|
14327
|
-7950
|
-7950
|
-7950
|
14327
|
14327
|
-7950
|
-7950
|
-7950
|
14327
|
15985
|
Таблиця 5.7. Карта руху наявних грошей за 2-й рік реалізації.
| Доходи та витрати
|
Сума, грн
|
Загалом
|
| I кв.
|
II кв.
|
III кв.
|
IV кв.
|
| Об’єм продажу
|
2
|
2
|
1
|
2
|
7
|
| Прибуток від реалізації
|
60 000
|
60 000
|
30 000
|
60 000
|
210 000
|
| Постійні
|
Зарплатня та податки
|
15 000
|
15 000
|
15 000
|
15 000
|
60 000
|
| Накладні витрати
|
7 500
|
7 500
|
7 500
|
7 500
|
30 000
|
| Страхові внески
|
1 350
|
1 350
|
1 350
|
1 350
|
5 400
|
| Загалом:
|
23 850
|
23 850
|
23 850
|
23 850
|
95 400
|
| Змінні
|
Витрати на тиражування
|
140
|
140
|
70
|
140
|
490
|
| Податки
|
12 000
|
12 000
|
6 000
|
12 000
|
42 000
|
| Витрати на адаптацію
|
3 306
|
3 306
|
1 653
|
3 306
|
11 571
|
| Загалом:
|
15 446
|
15 446
|
7 723
|
15 446
|
54 061
|
| Наявні гроші:
|
20 704
|
20 704
|
-1 573
|
20 704
|
60 359
|
Таблиця 5.8. Карта руху наявних грошей за 3-й рік реалізації.
| Доходи та витрати
|
Сума, грн
|
| Об’єм продажу
|
6
|
| Прибуток від реалізації
|
180 000
|
| Постійні
|
Зарплатня та податки
|
60 000
|
| Накладні витрати
|
30 000
|
| Страхові внески
|
5 400
|
| Загалом:
|
95 400
|
| Змінні
|
Витрати на тиражування
|
420
|
| Податки
|
36 000
|
| Витрати на адаптацію
|
9 918
|
| Загалом:
|
46 338
|
| Наявні гроші:
|
38 262
|
Таблиця 5.9. Таблиця прибутків та витрат.
| Найменування показника
|
Сума, грн
|
Загалом
|
| Початок реалізації
|
1 рік
|
2 рік
|
3 рік
|
| Кількість продажів
|
5
|
7
|
6
|
18
|
| Прибуток від продажів
|
0
|
150 000
|
210 000
|
180 000
|
540 000
|
| Постійні витрати
|
Витрати на розробку
|
Зарплатня дослідника
|
11 140
|
11 140
|
| Вартість матеріалів
|
1060
|
1060
|
| Вартість ПО для проведення дослідження
|
10 600
|
10 600
|
| Відрахування на соціальні заходи
|
4 055
|
4 055
|
| Вартість машинного часу(в т.ч. Internet)
|
642,9
|
642,9
|
| Накладні витрати
|
5570,25
|
5570,25
|
| Зарплатня та податки
|
60 000
|
60 000
|
60 000
|
180 000
|
| Накладні витрати
|
30 000
|
30 000
|
30 000
|
90 000
|
| Страхові внески
|
5 400
|
5 400
|
5 400
|
16 200
|
| Змінні витрати
|
Витрати на тиражування
|
350
|
490
|
420
|
1 260
|
| Податки
|
30 000
|
42 000
|
36 000
|
108 000
|
| Витрати на адаптацію
|
8 265
|
11 571
|
9 918
|
29 754
|
| Загалом витрат:
|
33 069
|
134 015
|
149 641
|
141 738
|
458 463
|
| Чистий прибуток:
|
-33 069
|
15 985
|
60 359
|
38 262
|
81 537
|
Визначимо точку беззбитковості – такий об’єм продажів, при якому виправдаються всі витрати. Аналітично її можна визначити по формулі:
 , (5.12) , (5.12)
де Зпост
– постійні витрати на строк реалізації, грн.;
Зр
– витрати на розробку, грн.;
Впрод
– вартість одиниці продукції, грн.;
Ззмін
– змінні витрати на одиницю продукції, грн..
Зпост
та Зр
визначаються за таблицею прибутків та витрат.
Впрод
= 30 000грн;
Ззмін
= Ззм
/Vпрод
= 139 014/18 = 7723(грн.);
Виходячи з цих даних визначають точку беззбитковості для кожного року:
Графік беззбитковості приведений на рис.7.1.
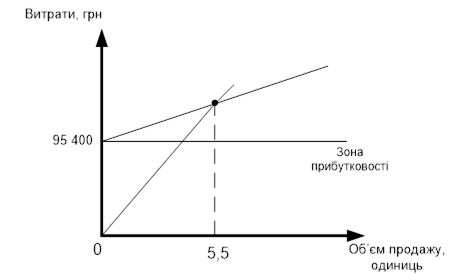
Рис. 5.1. Графік беззбитковості.
Таким чином можна зробити висновки, що проведене наукове дослідження є об’єктом інтелектуальної власності. Складений бізнес-план дозволив розрахувати витрати на проведення дослідження та скласти прогноз можливих прибутків: на основі очікуваних об’ємів продажу розраховано загальні витрати для перших трьох років реалізації, очікуваний чистий прибуток та точку беззбитковості, яка знаходиться на рівні 5,5 – 6 екземплярів на рік, що є цілком реальним.
Список використовуваної літератури:
1. Бизнес-план – Ваша путеводная звезда. Для чего он нужен? Как его составлять? Как им пользоваться? Экономика и жизнь.- 1991. – N33.
2. Методические указания по использованию бизнес-плана в дипломном проектировании. Харьковский университет радиоэлектроники. Харьков 1992г. (Левченко Л.В. и др.)
3. Организация, планирование и управление приборостроительным предприятием. / Учебное пособие под ред. В.А.Мищенко и Н.И.Погорелова. Киев, УМК, 1992.
4. О составе затрат и единичных нормах амортизационных отчислений. Из нормативных документов. М.: Финансы и кредит, 1992.
5. Перерва П.Г. Управление промышленным маркетингом. Харьков, Основа, 1993.
6. Современный маркетинг (под ред. Е.К.Хруцкого). – М.: Прогресс, 1991
6.1 Загальні питання
6.1.1 Загальні питання охорони праці
Охорона праці - це система правових, соціально-економічних, організаційно-технічних, санітарно-гігієнічних і лікувально-профілактичних заходів та засобів, спрямованих на збереження життя, здоров'я і працездатності людини у процесі трудової діяльності.
Головними задачами та метою охорони праці є зберігання здоров’я та дієспроможності людини, зріст вирбництва труда, зберігання високої якості продукції, що випускається, зменшення кількості нещасних випадків, аварій, а з цим і простоїв на підприємстві, укріпити та створити культуру трудової діяльності.
Виконання та розробка дипломного проекту “ Розробка дослідження системи керування електроприводом змінного струму дизель-потягу з використанням нейронних мереж ” відбувається за допомогою комп'ютера, тому питання охорони праці розглядаються щодо забезпечення здорових і безпечних умов роботи оператора і користувачів при проектуванні або дослідженні даного об'єкта.
6.1.2 Загальна характеристика виробничого приміщення
Розгляд показників виробничого приміщення, в якому безпосередньо велась розробка продукту, наведено у таблиці 5.1.
Таблиця 6.1. – Загальна характеристика виробничого приміщення
| Показник
|
Його призначення
|
Критерій (обґрунтування вибору)
|
Регламентуючі документи
|
| 1
|
2
|
3
|
4
|
| 1. Габарити приміщення, кількість робочих місць
|
Розміри приміщення 3м×4м×2.5м.
2 робочих місця – 6 м2
на кожного працівника.
|
Санітарні норми
Комфортні умови праці
|
ДНАОП 0.00‑1.31 [37]
|
| 2. Поверх, поверховість будівлі
|
1 поверх 4‑поверхової будівлі
|
СНіП 31-03 [31]
|
| 3. Вид природного освітлення
|
Бокове одностороннє. Вікна виходять на захід.
|
Нормоване значення КПО визначається по формулі та має складати не менше 1,5:
де  – значення КПО для III поясу світлового клімату = 2,5, – значення КПО для III поясу світлового клімату = 2,5,
m – коефіцієнт світлового клімату (для міст України, окрім Криму m=0,9%),
c – коефіцієнт сонячності клімату (с=1).  =5,5*0,9*1=2,25% =5,5*0,9*1=2,25%
|
СНіП II-4 32,
ДНАОП 0.00.‑1.31 [37]
|
| 4. Вид штучного освітлення, джерела світла
|
Загальний вид штучного освітлення. передбачено 4 газорозрядні лампи по 75 Вт кожна.
|
Газорозрядні дають більший світловий потік.
|
СНіП II-4 32,
ДНАОП 0.00.‑1.31 [37]
|
| 5. Клас приміщення по небезпеці ураження еклектичним струмом
|
Приміщення з підвищеною небезпекою.
|
Можливе одночасне доторкання людини до металоконструкцій споруд, що мають з’єднання з одного боку з ґрунтом, а з іншого – з металевим корпусом електрообладнання
|
ПУЭ [33]
|
| 6. Категорій по пожежній небезпеці
|
Пожежонебезпечна
|
В-категорій: присутність речовин, які продовжуватимуть горіння після видалення джерела запалення.
|
ОНТП-24 [34]
|
| 7. Клас зони по пожежній безпеці
|
II-IIa
|
Для захисту від запалення електропроводки передбачені металеві короби.
|
ПУЭ [33]
|
| 8. Ступінь стійкості вогнестійких будівельних конструкцій
|
Ступінь II
|
ДБН В.1.1-7 [35]
|
6.1.3 Загальна характеристика трудового процесу
За характером навколишнього середовища, машинний зал ПЕОМ відноситься до класу нормальних, тому що в ньому відсутні ознаки властиві жарким приміщенням, курним і з хімічно-активним середовищем згідно ГОСТ 12.1.005 [36]. За характером зорової роботи, робота відноситься до середньої точності, розряд зорової роботи IV, підрозряд зорової роботи В, найменший розмір об'єкта розрізнення 0,2-0,25 мм, контраст середній, фон світлий (згідно СНіП II-4 32).
При розробці програмного продукту чи проведенні експерименту зростає нервово-емоційна напруга. Причиною її виникнення може бути відхилення реального результату від запланованого, невідповідність інтенсивності інформаційних потоків індивідуальним можливостям людини, несприятливий вплив виробничого середовища й інших факторів, що викликають негативні емоції. Тому для науково обґрунтованого підходу до оптимізації розумової праці, одержання необхідних даних оптимальних умов праці повинне здійснюватися комплексно з застосуванням знань по промисловій гігієні й ергономіці.
Проведення комп’ютерного моделювання виробляється за допомогою комп’ютера, тому питання охорони праці розглядаються щодо забезпечення здорових і безпечних умов роботи оператора і науковця при проектуванні дослідженні об'єкта.
Режим праці та відпочинку ведеться відповідно до штатного розкладу: з 9-00 до 18-00 з перервою на обід з 13-00 до 14-00.
Продуктивність праці багато в чому залежить від умов на виробництві, таких як: освітлення; склад повітря; шуми; шкідливі випромінювання. Ці параметри по окремості й у комплексі впливають на організм людини, визначаючи його самопочуття. Категорію роботи враховуємо по фізичному навантаженню.
По енерговитратах організму, розробка програмного продукту відноситься до категорії 1а (легкої) тому що робота виробляється сидячи, не вимагає систематичної фізичної напруги підняття і перенесення ваг (витрата енергії при виконанні роботи до 150 ккал/годину).
Таблиця 6.2 – Загальна характеристика трудового процессу.
| Показник
|
Його призначення
|
Документи, що регламентують.
|
| 1
|
2
|
3
|
| 1.Роботи для виконання
|
Метою дипломної роботи магістра є проведення дослідження та моделювання системи керування дизель-потягу з використанням засобів нечіткої логіки та нейронних мереж.
|
Технічне завдання
|
| 2.Обладнання, що застосовується
|
Для виконання роботи виконується ПЕОМ
|
Технічне завдання
|
| 3.Умови зорової роботи:
-найменший розмір об’єкта розрізнення
-характеристика тла
Контраст об’єкта із тлом
|
Розмір мінімального елемента зображення (пикселя) для монохромних зображень 0,3мм
-Яскравість знака (яскравість тла) від 35 до 120 кд/кв. м
-Контраст від 3:1 до 1,5:1 (для монохромних зображень)
|
СНіП II-4-7932,
ДНАОП 0.00-1.31[37]
|
| Показник
|
Його призначення
|
Документи, що регламентують.
|
| 1
|
2
|
3
|
| 6.Режим роботи та відпочинку
|
Для підтримки нормальних умов роботи у холодний час передбачена наявність парового опалення з радіаторами, а в теплий час – системи кондиціонування.
|
Дсанпин 3.3.2.- 007[39]
|
| 7. Клас умов роботи за небезпечними та шкідливими виробничими факторами, важкості та напруженості роботи.
|
Клас умов роботи допустимий – 2.Індекс професійних захворювань
< 0.05
Категорія професійного ризику – зневажливо малий(переноси мий ризик).
|
ДНАОП 0.00-1.31[37],
ДНАОП 0.03-8.03 [40]
|
6.1.4 Загальна характеристика використовуваного виробничого електроустаткування
При живленні електроапаратури в будівлі використовується понижуючий трансформатор з 380 В до 220 В.
Таблиця 6.3 – Загальні характеристики електроапаратури та умов її експлуатації
| Показник
|
Його призначення
|
Критерій (обґрунтування вибору)
|
Регламентуючі документи
|
| 1
|
2
|
3
|
4
|
| 1. Режим живлення :
характеристика споживаної енергії
- вид
- напруга
- режим мережі
- споживана потужність
|
Живлення здійснюється від трьох ведучої мережі: фазовий дріт, нульовий робочий дріт, нульовий захисний дріт.
Напруга - 220В,
Споживана потужність комп’ютером -350Вт.
|
Експлуатаційно- технічні вимоги, паспорт
|
| 2. Кліматичні умови надійно роботи
|
15ºС -35 ºС
|
Утворення водного конденсату на обладнанні при низькій температурі. Нестабільна робота напівпровідникової при підвищених температурах.
|
Технічний паспорт
|
| 3. Ступінь захисту
|
Захист техніки від впливу виробничого середовища
|
IP44
|
ПЭУ [33]
|
| 4. Клас за засобом захисту від ураження електричним струмом
|
Клас II
|
Захист від ураження електричним струмом здійснюється завдяки застосуванню подвійної ізоляції силових кабелів монітору та комп’ютеру та використанню їхнього занулення із мережею живлення.
|
ГОСТ 12.2.007.0 [41],
ГОСТ 25861 [42], ДНАОП 0.00‑1.31 [37]
|
| 5. Схемно-конструктивні
|
Занулення електроприладів на загальну магістраль мережі живлення.
|
Присутня можливість одночасного дотику людини до металоконструкцій будинків і т.п., які мають з'єднання з землею, з одного боку, і до металевих корпусів електрообладнання – з іншої сторони.
|
ПУЭ [33],
ГОСТ 12.1.030 [43],
ДНАОП 0.00‑1.31 [37]
|
6.1.5 Аналіз небезпечних і шкідливих факторів
При роботі на ПЕОМ на людину впливають ряд шкідливих і небезпечних факторів, що класифікуються відповідно ГОСТ 12.0.003 [38].
Небезпечним фактором називається фактор, що викликає травму або ушкодження організму. Шкідливий фактор – фактор, тривалий вплив якого приводить до патології в організмі – професійним захворюванням. Ці фактори розділяються на фізичні, хімічні, біологічні і психофізичні. Основні з них приведені в таблиці 6.4.
Таблиця 6.4 – Перелік небезпечних і шкідливих факторів.
| Найменування
|
Джерело
|
Нормовані значення
|
Регламентуючі документи
|
| 1
|
2
|
3
|
4
|
| 1 Фізичні
|
| 1.1
Підвищений рівень шуму
|
Освітлювальна система, вентиляційна система, друкуючі пристрої
|
L=50дБА
|
ГОСТ 12.1.003 [38],
ГОСТ 12.1.029 [44]
|
| 1.2
Підвищена іонізація повітря робочої зони
|
Рентгенівське випромінювання комп'ютера
|
Кількість легких
-позитивних іонів
Ф=1500…3000см
-негативних іонів Ф=3000…5000см
|
ДНАОП 0.00-1.31 [37]
|
| 1.3
Небезпечна напруга в електричному ланцюгу
|
Живильна електрична мережа
|
I=1,6 A
|
ГОСТ 12.1.038 [45],
ГОСТ 12.1.019 [46]
|
| 1.4
Підвищений потенціал статичної електрики
|
Діелектрична поверхня комп'ютера
|
Нормовані значення
E=20 кв/м
|
ГОСТ 12.1.019 [46],
ГОСТ 12.1.045 [47]
|
| 1.5
Рентгенівське випромінювання
|
Комп'ютер
(ЕПТ)
|
На відстані 5 см від екрана рівень випромінювання не повинен перевищувати 0,06 мкР/год,
(100 мкР/година)
|
ДНАОП 0.00-1.31 [37]
|
| 1.6
Ультрафіолетове випромінювання
|
Комп'ютер
(ЕПТ)
|
Щільність потоку ультрафіолетового випромінювання 10Вт/м2
|
ДНАОП 0.00-1.31 [37]
|
| 1.7
Недолік природного освітлення
|
Невірне розташування комп'ютерів
|
eIV
н
=1,5%
|
СНіП II-4 [32]
|
| 1.8
Недолік штучного освітлення
|
Невірне планування штучної системи освітлення
|
Е=500 лк
|
СНіП II-4 [32]
|
| 1.9
Відбиті бліки
|
Невірне розташування комп'ютерів
|
Повинна бути відсутня у полі зору (P=0)
|
СНіП II-4 [32]
|
| 1.10
Перевищення припустимої величини дискомфорту
|
Невірне планування штучної системи освітлення
|
М=5%
|
СНіП II-4 [32]
|
| 1.11
Коефіцієнт пульсації газорозрядних ламп
|
Неповне розфазування світильників
|
K.п.=5%
|
СНіП II-4 [32]
|
| 2 Хімічні
|
| 2.1
Виробничий пил (аерогелі)
|
Статична електрика, накопичена на діелектричній поверхні комп'ютера
|
ПДК = 10 мг/м3
|
ГОСТ 12.1.005 [36]
|
| 3 Нервово-психологічні перевантаження
|
| 3.1
Розумове перенаванта-ження
|
Відповідальність, труднощі виробничого завдання
|
Категорія роботи: напружена
|
[48]
|
| 3.2
Переванта-ження аналізаторів
|
Відповідальність, труднощі виробничого завдання
|
Зниження витривалості до вихідного
40% .. 50%
|
[48]
|
| 3.3
Емоційні пе-ревантаження
|
Відповідальність, труднощі виробничого завдання
|
Подовження часу реакції на світло та звук до вихідного
40…50%
|
[48]
|
| 4 Ергонометричні характеристики
|
| 4.1
Яскравість екрану
|
Екран комп'ютера
|
В=100кд/м2
|
ДНАОП 0.00-1.31 [37]
|
| 4.2
Контрастність зображення ліній фону
|
Екран комп'ютера
|
До=(Вф
-Во
)/Вф
=0,9
Вф
–яскравість тла
В – яскравість об'єкта
|
ДНАОП 0.00-1.31 [37]
|
6.2.1 Параметри мікроклімату
Метеорологічні умови на виробництві мікроклімат визначають наступні параметри: температура (C), рухливість (м/с), відносна вологість повітря (%) і теплове випромінювання
Оскільки дипломна робота відноситься до легких фізичних робіт, але характеризується напруженою розумовою працею, то, керуючись ГОСТ 12.1.005 [36] застосовують оптимальні параметри мікроклімату для даного приміщення, які приведені у таблиці 6.5.
Таблиця 6.5 – Значення параметрів мікроклімату в робочій зоні.
| Категорія робіт
|
Період року
|
Температура
t 0
С (оптимальна)
|
Відносна вологість, %
|
Швидкість повітря, м/c
|
| Легка – Iа
|
Холодний
|
22 – 24
|
40 – 60
|
0,1
|
| Легка – Iа
|
Теплий
|
23 – 25
|
40 – 60
|
0,1
|
Місце виконання дипломної роботи оздоблено системами вентиляції, центрального парового опалення та кондиціонування. Функціонування цих систем забезпечує оптимальні параметри мікроклімату.
6.2.2 Освітлення
Особливістю роботи за дисплеєм ЕОМ є постійна і значна напруга функцій зорового аналізатора, обумовленого необхідністю розпізнання самосвітних об'єктів (символів, знаків і т.п.), при наявності відблисків на екрані, рядковій структурі екрана, мельканням зображення, недостатньою чіткістю об'єктів.
Для забезпечення нормального освітлення застосовуються природне і штучне освітлення, а також комбіноване, котрі нормуються СНіП II-4 [32].
6.2.2.1 Природне освітлення
Усі виробничі приміщення, з постійним перебуванням у них людей, відповідно до санітарних норм і правил, мають природне освітлення.
У нашому випадку, як зазначалось вище, використовується однобічне природне освітлення з розташуванням віконних пройомів на захід. Природне освітлення нормується коефіцієнтом природного освітлення (КПО) по СНіП II-4 [32].
Нормовані значення КПО для будинків, розташованих у IV поясі світлового клімату визначаються по наступній формулі:
eIV
н
=eн
III
*m*c, (6.1)
де eн
III
- значення КПО для III пояса світлового клімату складає 2,5
(згідно СНіП II-4 [32]);
m - коефіцієнт світлового клімату (для міст України, окрім Криму m=0,9% згідно СНіП II-4 [32]);
c - коефіцієнт сонячності клімату (для міста України c=1,0 згідно СНіII II-4 [32]).
Таким чином для міста Стаханова згідно (6.1) отримуємо нормоване значення КПО eIV
н
= 2,5*0,9*1= 2,25 %.
6.2.2.2 Штучне освітлення
На робочому місці застосовується загальне штучне освітлення, у темний період доби - комбіноване. Штучне освітлення нормується СНіП II-4 [32]. Для створення комфортних умов зорової роботи середньої точності необхідні наступні дані по нормах освітлення. Дані по нормах освітлення приведені в таблиці 6.6.
Таблиця 6.6 – Норми освітлення.
| Характеристика зорової роботи
|
Найменший розмір об’єкта розпізнавання, мм
|
Розряд
зорової роботи
|
Підрозряд зорової роботи
|
Контраст об’єкта
розпізнавання із тлом
|
Характеристика тла
|
Нормативні значення параметрів освітлення
|
| Освітлення при штучному
освітленні, Лк
|
КПО ен
IV
при природному боковому освітленні, %
|
| Високої точності
|
0,2-0,25
|
IV
|
в
|
Середній
|
Світлий
|
Е=500
|
2,25
|
6.2.3 Випромінювання від екрана
ЭПТ генерує кілька типів випромінювання, у тому числі: гама - , рентгенівське, радіочастотне, мікрохвильове, видиме, ультрафіолетове й інфрачервоне випромінювання. Рівні цих випромінювань не перевищують діючих норм.
Вимоги щодо припустимих значень неіонізуючого електромагнітного випромінювання: напруженість електромагнітного поля на відстані 50см навколо ЭПТ за електричною складовою не повинна перевищувати:
у діапазоні частот 5 Гц - 2 КГц - 25 В/м,
у діапазоні частот 2 КГц - 400 КГц - 2,5 В/м,
Щільність магнітного потоку не повинна перевищувати:
у діапазоні частот 5 Гц - 2 КГц - 250 нТл,
у діапазоні частот 2 КГц - 400 КГц - 25 нТл,
Поверхневий електростатичний потенціал не повинний перевищувати 500 В.
Конструктивне рішення екрана дисплея таке, що рентгенівське випромінювання від екрана на відстані 10см не перевищує 100 мкР/година .
У приміщеннях з дисплеями необхідно контролювати іонізацію. У таблиці 6.7 приведені рівні іонізації повітря робочого місця.
Таблиця 6.7 – Рівні іонізації повітря робочого місця.
| Рівні
|
Кількість іонів на 1 см3
повітря
|
| n+
|
n-
|
| Мінімально необхідні
|
400
|
600
|
| Оптимальні
|
1500-3000
|
3000-5000
|
| Максимально припустимі
|
50000
|
50000
|
Варто враховувати, що м'яке рентгенівське випромінювання, що виникає при напрузі на аноді 20-22 КВ, а також напруга на струмопровідних ділянках схеми викликає іонізацію повітря з утворенням позитивних іонів, що вважаються несприятливими для людини.
6.3 Техніка безпеки
6.3.1 Електробезпека
Зважаючи на той факт що робоче місце, де знаходиться ПЕОМ, є приміщенням з підвищеною небезпекою ураження людини електричним струмом, необхідно передбачити наступні міри електробезпеки:
- конструктивні заходи електробезпеки;
- схемно-конструктивні заходи електробезпеки;
- експлуатаційні заходи електробезпеки.
6.3.1.1 Конструктивні міри електробезпеки
Конструктивні міри безпеки скеровані на вилучення можливості доторкання людини до частин, за якими подається електричний струм.
Для вилучення можливості доторкання оператору до частин, за якими подається електричний струм, всі силові вмикачі розташовані в закритих корпусах. Застосовується блочний монтаж.
Ступінь захисту обладнання відповідає IP44(де 4 – захист від твердих тіл розміром більше 1 мм; 4 – захист від бризок ) згідно з ПУЭ [33] та ГОСТ 14254 [49].
Згідно з ГОСТ 12.2.007.0 [41] приймається І клас захисту від ураження електричним струмом обслуговуючого персоналу тому, що комп’ютер має робочу ізоляцію та елементи захисту.
6.3.1.2 Схемно-конструктивні міри електробезпеки
Схемно-конструктивні міри електробезпеки забезпечують безпеку дотику людини до металевих частин електричних апаратів, що не використовуються для передачі електричного струму, при випадковому пробої їхньої ізоляції та виникнення електричного потенціалу на них.
Живлення здійснюється від трьохдротової мережі: фазовий дріт, нульовий робочий дріт, нульовий захисний дріт.
Зважаючи на той факт, що напруга менше 1000 В, але більше 42 В, тоді згідно з ГОСТ 12.1.030 [43] з метою захисту від ураження електричним струмом застосовується занулення, тому що лабораторія є приміщенням з підвищеною небезпекою ураження людини електричним струмом з тієї причини, що мається можливість одночасного дотику людини до металоконструкцій будівель та т.п., що мають з’єднання із землею, з одного боку, та до металевих корпусів електронного обладнання – з іншого боку.
Занулення – передбачене електричне з’єднання з нульовим захисним провідником металевих частин, що не використовуються для передачі електричного струму та можуть опинитися під напругою.
6.3.1.3 Схема занулення та призначення елементів занулення
За засобом захисту від ураження електричним струмом система, що проектується, відноситься до І класу згідно з ГОСТ 12.2.007.0 [41].
Схему занулення наведено на рисунку 5.1.
 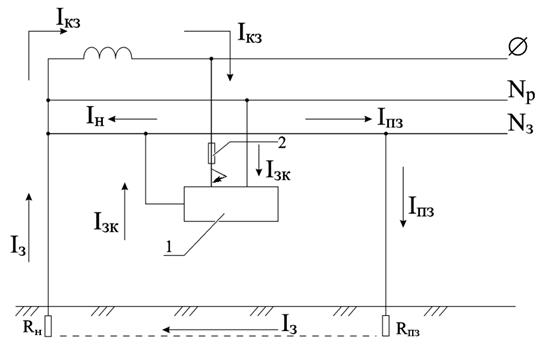
Рисунок 5.1 – Схема занулення.
Призначення елементів занулення:
Rзн
– заземлення точки нейтралі;
Rзн
– повторне заземлення;
Nз
– нульовий захисний дріт;
Nр
– нульовий робочий дріт;
Ø – живильний дріт;
Ікз
– струм короткого замикання;
Іпз
– струм повторного заземлення;
Ізк
– струм замикання на корпус;
1 – прилад; 2 – запобіжник.
Призначення нульового захисного провідника - забезпечити необхідне для відключення установки значення току однофазного короткого замикання шляхом створення для цього струму ланцюгу з малим опором.
Призначення заземлення нейтралі обмоток джерела струму(що живить мережу до 1000В) – зниження напруги занулених корпусі(а, що виходить, нульового захисного провідника) відносно землі до безпечного значення при замиканні фази на землю.
Призначення повторного заземлення нульового захисного провідника – зниження напруги на занулених корпусах в період замикання фази на корпус. Повторне занулення значно зменшує небезпеку ураження струмом, яка виникає в результаті обриву нульового захисного провідника та замикання фази на корпус за місцем обриву, але не може усунути її цілком, тобто не може забезпечити тих умов безпеки, що існували до обриву. Повторне заземлення нульового захисного провідника призначено для зниження напруги відносно землі занулених конструкцій в період замикання фази на корпус як при справній схемі занулення, так і випадку обриву нульового захисного провідника.
6.3.1.4. Експлуатаційні міри електробезпеки
Первинним джерелом живлення ПЕОМ є трьохдротова мережа.: фазовий дріт, нульовий робочий дріт, нульовий захисний дріт. Електроживлення здійснюється від електроустановки (трансформатора ) з регульованою напругою під навантаженням. Напруга мережі подається в розподільну шафу.
В приміщенні прокладена шина повторного заземлення (провідник, яким заземлюють) виконана відповідно до ГОСТ 12.1.030 [43], котра металево з’єднується із заземленою нейтраллю електроустановки.
6.3.2 Ергономічні вимоги до робочого місця
1. Організація робочого місця з обслуговування, ремонту та налагодження ЕОМ повинна забезпечувати відповідність усіх елементів робочого місця та їх розташування ергономічним вимогам відповідно до ГОСТ 12.2.032-78 ССБТ “Робоче місце при виконанні робот сидячи. Загальні ергономічні вимоги”[51], характеру та особливостей трудової діяльності.
2. Площа, виділена для одного робочого місця з відеотерміналом або персональною ЕОМ, повинна складати не менше 6 кв. м, а обсяг - не менше 20 куб.м.
3. Робочі місця з відеотерміналами відносно світлових прорізів повинні розміщуватися так, щоб природне світло падало збоку, переважно зліва.
4. При розміщенні робочих місць з відеотерміналами та персональними ЕОМ необхідно дотримуватись таких вимог:
- робочі місця з відеотерміналами та персональними ЕОМ розміщуються на відстані не менше 1 м від стін зі світловими прорізами;
- відстань між бічними поверхнями відеотерміналів має бути не меншою за 1,2 м;
- відстань між тильною поверхнею одного відеотермінала та екраном іншого не повинна бути меншою 2,5 м;
- прохід між рядами робочих місць має бути не меншим 1 м.
Вимоги цього пункту щодо відстані між бічними поверхнями відеотерміналів та відстані між тильною поверхнею одного відеотерміналу та екраном Іншого враховуються також при розміщенні робочих місць з відеотерміналами та персональними ЕОМ в суміжних приміщеннях, з урахуванням конструктивних особливостей стін та перегородок.
5. Організація робочого місця користувача ЕОМ повинна забезпечувати відповідність усіх елементів робочого місця та їх розташування ергономічним вимогам відповідно до ГОСТ 12.2.032-78, з урахуванням характеру та особливостей трудової діяльності.
6. Конструкція робочого місця користувача відеотерміналу (при роботі сидячи) має забезпечувати підтримання оптимальної робочої пози з такими ергономічними характеристиками: ступні ніг - на підлозі або на підставці для ніг; стегна - в горизонтальній площині; передпліччя - вертикально; лікті - під кутом 70 - 90 град, до вертикальної площини; зап'ястя зігнуті під кутом не більше 20 град, відносно горизонтальної площини, нахил голови - 15-20 град, відносно вертикальної площини.
7. Якщо користування відеотерміналом та персональною ЕОМ є основним видом діяльності, то вказане обладнання розміщується на основному робочому столі, як правило, з лівого боку.
8. Якщо використання відеотерміналу та персональної ЕОМ є періодичним, то устаткування, як правило, розміщується на приставному столі, переважно з лівого боку від основного робочого столу. Кут між поздовжніми осями основного та приставного столів має бути 90 - 140 град.
9. Якщо використання відеотерміналу та персональної ЕОМ є періодичним, то дозволяється обладнувати в приміщенні, що відповідає вимогам даних Правил, окремі робочі місця колективного користування з відеотерміналом та персональною ЕОМ.
10. Висота робочої поверхні столу для відеотерміналу має бути в межах 680 - 800 мм, а ширина - забезпечувати можливість виконання операцій в зоні досяжності моторного поля.
Рекомендовані розміри столу: висота - 725 мм, ширина - 600 -1400 мм, глибина - 800 -1000 мм.
11. Робочий стіл для відеотерміналу повинен мати простір для ніг висотою не менше 600 мм, шириною не менше 500 мм, глибиною на рівні колін не менше 450 мм, на рівні витягнутої ноги - не менше 650 мм.
12. Робочий стіл для відеотерміналу, як правило, має бути обладнаним підставкою для ніг шириною не менше 300 мм та глибиною не менше 400 мм, з можливістю регулювання по висоті в межах 150 мм та кута нахилу опорної поверхні - в межах 20 град. Підставка повинна мати рифлену поверхню та бортик на передньому краї заввишки 10 мм.
13. Застосування підставки для ніг тими, у кого ноги не дістають до підлоги, коли робоче сидіння знаходиться на висоті, потрібній для забезпечення оптимальної робочої пози відповідно до пункта 4.1.6, є обов'язковим.
14. Робоче сидіння (сидіння, стілець, крісло) користувача відеотерміналу та персональної ЕОМ повинно мати такі основні елементи: сидіння, спинку та стаціонарні або знімні підлоxxxники.
У конструкцію сидіння можуть бути введені додаткові елементи, що не є обов'язковими: підголовник та підставка для ніг.
15. Робоче сидіння користувача відеотерміналу та персональної ЕОМ повинно бути підйомно-поворотним, таким, що регулюється за висотою, кутом нахилу сидіння та спинки, за відстанню спинки до переднього краю сидіння, висотою підлоxxxників.
16. Регулювання кожного параметра має бути незалежним, плавним або ступінчатим, мати надійну фіксацію.
Хід ступінчатого регулювання елементів сидіння має становити для лінійних розмірів 15 -20 мм, для кутових - 2 - 5 град. Зусилля під час регулювання не повинні перевищувати 20 Н.
17. Ширина та глибина сидіння повинні бути не меншими за 400 мм. Висота поверхні сидіння має регулюватися в межах 400 - 500 мм, а кут нахилу поверхні - від 15 град, вперед до 5 град, назад.
18. Поверхня сидіння має бути плоскою, передній край - заокругленим.
19. Висота спинки сидіння має становити 300±20 мм, ширина - не менше 380 мм, радіус кривизни в горизонтальній площині - 400 мм. Кут нахилу спинки повинен регулюватися в межах 0-30 град, відносно вертикального положення. Відстань від спинки до переднього краю сидіння повинна регулюватись у межах 260 - 400 мм.
20. Для зниження статичного напруження м'язів рук необхідно застосовувати стаціонарні або знімні підлоxxxники довжиною не менше 250 мм, шириною - 50 - 70 мм, що регулюються по висоті над сидінням у межах 230±30 мм та по відстані між підлоxxxниками в межах 350 - 500 мм.
21. Поверхня сидіння, спинки та підлоxxxників має бути напівм'якою, з неслизьким, ненаелектризовуючим, повітронепроникним покриттям та забезпечувати можливість чищення від бруду.
22. Екран відеотермінала та клавіатура мають розташовуватися на оптимальній відстані від очей користувача, але не ближче 600 мм, з урахуванням розміру алфавітно-цифрових знаків та символів.
23. Розташування екрану відеотерміналу має забезпечувати зручність зорового спостереження у вертикальній площині під кутом ±30 град, від лінії зору працівника.
24. Клавіатуру слід розміщувати на поверхні столу або на спеціальній, регульовуваній за висотою, робочій поверхні окремо від столу на відстані 100-300 мм від краю, ближчого до працівника. Кут нахилу клавіатури має бути в межах 5-15 град.
25. Робоче місце з відеотерміналом слід оснащувати пюпітром (тримачем) длядокументів, що легко переміщується.
26. Пюпітр (тримач) для документів повинен бути рухомим та встановлюватись вертикально (або з нахилом) на тому ж рівні та відстані від очей користувача ЕОМ, що і відеотермінал.
27. Розміщення принтера або іншого пристрою введення-виведення інформації на робочому місці має забезпечувати добру видимість екрану відеотермінала, зручність ручного керування пристроєм введення-виведення інформації в зоні досяжності моторного поля: по висоті 900 - 1300 мм, по глибині 400 - 500 мм.
28. Під матричні принтери потрібно підкладати вібраційні килимки для гасіння вібрації та шуму.
29. При потребі високої концентрації уваги під час виконання робіт з високим рівнем напруженості суміжні робочі місця з відеотерміналами та персональними ЕОМ необхідно відділяти одне від одного перегородками висотою 1,5 - 2 м.
30. Організація робочого місця, яке передбачає використання ЕОМ для управління технологічним обладнанням (станки з програмним управлінням, роботизовані технологічні комплекси, обладнання для гнучкого автоматизованого виробництва тощо), повинна передбачати:
- достатній простір для людини-оператора;
- вільну досяжність органів ручного управління в зоні моторного поля: відстань по висоті - 900 - 1330 мм, по глибині - 400 - 500 мм;
- розташування екрана відеотермінала в робочій зоні, яке забезпечувало б зручність зорового спостереження у вертикальній площині під кутом плюс-мінус ЗО град, від лінії зору оператора, а також зручність використання відеотермінала під час коригування керуючих програм одночасно з виконанням основних виробничих операцій;
- відстань від екрана до ока працівника повинна відповідати вимогам пункту 4.1.22;
- можливість повертання екрана відеотермінала навколо горизонтальної та вертикальної осі.
6.4 Пожежна безпека
Пожежна безпека - стан об'єкта при якому із установленою ймовірністю виключається можливість виникнення і розвитку пожежі, а також забезпечується захист матеріальних цінностей.
Причинами, що можуть викликати пожежу в розглянутому приміщенні, є:
- несправність електропроводки і приладів;
- коротке замикання електричних ланцюгів;
- перегрів апаратури;
- блискавка.
Приміщення по пожежній безпеці відноситься до категорії В відповідно до ОНТП-24 [21], тому що в обігу знаходяться тверді спалимі речовини і матеріали. Ступінь вогнестійкості будинку - II відповідно до ДБН В.1.1-7 [35], клас приміщення по пожежній небезпеці П-ІІа, відповідно до ПУЭ [33].
Пожежна безпека відповідно до ГОСТ 12.1.004 [50] забезпечується системами запобігання пожежі, пожежного захисту, організаційно-технічними заходами.
Система запобігання пожежі:
- контроль і профілактика ізоляції;
- наявність плавких вставок і запобіжників в електричному обладнанні;
- для захисту від статичної напруги використовується заземлення;
- захист від блискавок будівель і обладнання.
Для даного класу будівель і місцевості із середньою грозовою діяльністю 10 і більш грозових годин у рік, тобто для умов м. Стаханова встановлена III категорія захисту від блискавок.
Ступінь захисту відповідному класу помешкання П П-а ІР44 для обладнання і ІР2Х для світильників.
Система пожежного захисту:
- аварійне відключення і переключення апаратури;
- наявність первинних засобів пожежогасіння, вогнегасників ОП-5, тому що вуглекислота має погану електропровідність, або порошкових вогнегасників;
- система оповіщення, світлова і звукова сигналізація;
- захист легкозаймистих частин обладнання, конструкцій захисними матеріалами;
- використання негорючих матеріалів для акустичної обробки стін і стель;
- у помешканнях, де немає робочого персоналу, встановлена автоматична система пожежного захисту.
Для успішної евакуації персоналу при пожежі розміри дверей робочого помешкання повинні бути наступними: - ширина дверей не менше 1,5 м, - висота дверей не менше 2,0 м, - ширина коридору 1,8 м; робоче помешкання повинно мати два виходи; відстань від найбільш віддаленого робочого місця не повинна перевищувати 100 м.
Організаційні заходи пожежної профілактики:
- навчання персоналу правилам пожежної безпеки;
- видання необхідних інструкції і плакатів, плану евакуації персоналу у випадку пожежі.
Приміщення відповідає вимогам пожежної безпеки.
6.5 Охорона навколишнього середовища
Збільшення ефективності виробництва, його інтенсифікація нерозривно зв’язані з створенням здорових та безпечних умов труда.
Охорону праці можна розглядати як систему, яка забезпечує в сфері виробництва оптимальне з точки зору збереження здоров’я та працездатності взаємодії людей з технічними засобами та навколишнім середовищем.
Охорона навколишнього середовища - комплекс заходів, призначених для обмеження негативного впливу людської діяльності на природу.
Такими заходами можуть буди:
1. Обмеження викидів у атмосферу та гідросферу с метою покращення загальної екологічної обстановки.
2. Створення заповідників, національних парків з метою збереження природних комплексів.
3. Обмеження ловлі риби, охоти, з метою збереження конкретних видів.
4. Обмеження несанкціонованих викидів мусору.
При вирішенні технічних задач необхідно приділяти особливу увагу питанні взаємодії виробничої середи з навколишньою природною середою. Результат господарської діяльності людини сказуються вже не тільки в локальному, але й у регіональному, а у ряді випадківі глобальному масштабах. Охорона навколишнього середовища становиться важливою соціальною та економічною проблемою.
Висновки
Під час розробки треба забезпечити всі умови для комфортної та безпечної роботи, спробувати уникнути небезпечних та шкідливих факторів, що мають місце при роботі з комп`ютером, забезпечити природне та штучне освітлення на робочому місці відповідно нормативним значенням, дотримуватись правил електробезпеки та пожежної безпеки.
У процесі роботи за компютером опрератором шкода навколишньому середовищу не наноситься. Відроблений матеріал типу відробленої бумаги, диски та ін. виноситься у спеціально відведені місця.
7. ЦИВІЛЬНА ОБОРОНА
Вступ
Цивільна оборона - складова частина системи загальнодержавних заходів, проведених з метою захисту населення й об'єктів народного господарства в умовах надзвичайних ситуацій мирного і воєнного часу. Ця мета може бути досягнута завчасним проведенням організаційних, інженерно - технічних і інших заходів, спрямованих на максимальне зниження впливу вражаючих факторів.
Навчання населення захисту від впливу зброї масового ураження й інших засобів нападу супротивника - одна з основних задач Цивільної оборони України. Воно організується і проводиться на підставі вказівок старших начальників ГО і їхніх штабів, а також вказівок і рішень місцевих органів з питань ГО[1].
Ядерна енергія володіє величезною руйнівною і вражаючою силою. Вона здатна викликати великі людські жертви і заподіяти величезний матеріальний збиток. Значні руйнування на об'єктах народного господарства, великі втрати серед населення можуть стати причиною різкого скорочення випуску промислової і сільськогосподарської продукції, викликати необхідність проведення рятувальних і невідкладних аварійно-відбудовних робіт у зонах ураження. У зв'язку з цим виникає необхідність завчасно уживати відповідні заходи по захисту населення від впливу вражаючих факторів ядерного ураження, забезпеченню стабільної роботи об'єктів народного господарства, що складає суть задач цивільної оборони.
Питаннями захисту і підвищення стійкості роботи об'єктів народного господарства в умовах надзвичайних ситуацій займалися і раніш. Однак так гостро, як зараз, ця проблема ніколи ще не стояла, тому що характер і можливі наслідки ядерних техногенних катастроф або збройного впливу сучасних засобів ураження придбали якісно нові особливості. Саме тому дана тема є актуальною.
В даному розділі розглядається тема «Оцінка радіаційної обстановки після ядерного вибуху на ТОВ «Кристал».
Навчання по ЦО є загальним для всіх громадян. Тому питання навчання населення по цивільній обороні актуальний і донині . Відповідальність за навчання керівного складу ЦО, робітників та службовців по ЦО на підприємстві, а також населення, що проживає у відомчому житловому секторі, покладається на начальника ЦО підприємства. Через штаб ГО об'єкта він організує, забезпечує і керує проведенням навчальних заходів, здійснює постійний контроль за своєчасним і якісним проведенням занять і навчань[53].
Радіаційна обстановка може виникнути при аварії на радіаційно-небезпечному об’єкті (наприклад, атомній електростанції) або при ядерному вибуху.
Під оцінкою радіаційної обстановки розуміють масштаби і ступінь радіаційного зараження (забруднення) місцевості, що робить вплив на життєдіяльність населення і роботу господарських об'єктів.
Оцінка радіаційної обстановки є обов'язковим елементом роботи начальників і штабів цивільної оборони. Проводиться вона для прийняття необхідних заходів по захисту населення, які забезпечують виключення або зменшення радіоактивного опромінювання, а також для визначення найбільш доцільних дні населення і формувань ЦО на зараженій місцевості.
Оцінка радіаційної обстановки передбачає:
- визначення і нанесення на карту (схему) зон радіоактивного
зараження або рівнів радіації в окремих точках місцевості.
- вирішення основних типових завдань за різними варіантами дій населення, формувань ЦО, а також виробничої діяльності промислових підприємств (об'єктів) в умовах радіоактивного зараження;
- аналіз отриманих результатів;
- вибір найбільш доцільних варіантів дій, при яких виключаються або зменшуються радіаційні втрати.
Радіаційна обстановка характеризується двома основними параметрами: розмірами зон зараження і рівнями радіації. Окрім цих даних для оцінки радіаційної обстановки необхідно знати:
а)умови перебування людей в зонах радіоактивного Зараження, їх захищеність;
б)значення коефіцієнтів послаблення радіації захисними спорудами, які призначені для укриття робітників, службовців на підприємствах і непрацюючого населення в місцях проживання;
в)допустимі дози опромінення населення і формувань ЦО на період перебування на місцевості, зараженій радіоактивними речовинами;
г)поставлені завдання формуванням ЦО і терміни їх виконання.
Виявлення радіаційної обстановки може проводитися двома способами: шляхом прогнозування (пророкування) і за даними радіаційної розвідки.
Метою прогнозування радіаційного зараження (забруднення) місцевості є встановлення з визначеним ступенем вірогідності місця розташування і розмірів зон радіоактивного зараження (забруднення).
Перший спосіб застосовується штабами цивільної оборони господарських об'єктів і вищестоящих штабів. Дані прогнозованої обстановки використовуються для:
а) своєчасного оповіщення населення про надзвичайні ситуації;
б) завчасного вживання заходів захисту;
в) своєчасної постановки задач на ведення радіаційної розвідки.
Для прогнозування можливого радіоактивного зараження необхідно знати:
- час ядерного вибуху (час аварії на радіаційно небезпечному об'єкті).
- Координати центру ядерного вибуху (аварії).
- Потужність і вид ядерного вибуху .
- Швидкість і напрямок середнього вітру. Середній вітер — це осереднений по швидкості і напрямку вітер для шарів атмосфери в межах висоти піднімання радіоактивної хмари. Він визначається графічним методом по відомих даних вітрового зондування атмосфери, яке проводиться радіозондами, акустичними, радіолокаційними і космічними засобами контролю. Ці дані дають метеорологічні станції відповідним штабам ІДО. Азимут середнього вітру — це кут між напрямком на північ і напрямком, звідки дме вітер, відрахований по ходу стрілки годинника. Наприклад, якщо вітер дме з заходу на схід, то азимут вітру 270°
При прогнозуванні радіаційної обстановки використовується методика, заснована на імовірносних розрахунках. Суттєвість ймовірнісної методики прогнозування зводиться до того, що визначається напрямок розповсюдження хмари радіоактивних речовин і наносяться на карту (схему) можливі зони радіоактивного зараження[54].
Другий спосіб застосовують командири невоєнізованих формувань, а також штаби цивільної оборони господарських об'єктів. Вихідні дані для оцінки радіаційної обстановки добуваються підрозділами розвідки, тобто : посадами радіаційного і хімічного спостереження; чи ланками групами радіаційної і хімічної розвідки, а також з інформації, що надходить від сусідніх і вищестоящих штабів цивільної оборони.
У випадку аварії на атомній електростанції вихідними даними для оцінки обстановки будуть : тип і потужність реактора; час аварії; реальні виміри потужності доз опромінення; метеоумови.
При ядерному вибуху вихідними даними є: вид, потужність і час вибуху; координати вибуху; реальні виміри доз опромінення; метеоумови.
Після виявлення обстановки виробляється її оцінка. Під оцінкою обстановки розуміють рішення задач по різних діях невоєнізованих формувань цивільної оборони, виробничої діяльності господарських об'єктів і населення в умовах радіаційного зараження (забруднення). Такими задачами можуть бути: визначення можливих доз опромінення при діях у зонах зараження; визначення припустимого часу початку робіт у зоні (початку входу в зону) зараження по заданій (припустимої чи встановлений) дозі опромінення; визначення припустимої тривалості перебування в зоні зараження по заданій дозі опромінення; визначення потрібної кількості змін для виконання робіт у зоні зараження, і інші[55].
Визначення можливих доз опромінення за час перебування в зоні зараження дозволяє оцінити ступінь небезпеки поразки людей і намітити шляху доцільних дій. З цією метою розраховане значення дози опромінення порівнюють із припустимою дозою. Якщо виявиться, що люди одержать дозу, що перевищує припустиму, то необхідно скоротити час перебування в чи зоні почати роботи пізніше. Припустиму дозу опромінення для особового складу невоєнізованих формувань установлює начальник цивільної оборони господарського об'єкта, тобто керівник підприємства. Припустима доза по нормах особливого періоду не повинна перевищувати: при однократному опроміненні (протягом чотирьох доби) не більш 50 Р; при багаторазовому: протягом місяця - 100 Р, кварталу - 200 Р и року - 300 Р. [52]
Таким чином, можна зробити висновки, що достовірне оцінювання радіаційного фону після ядерного вибуху, своєчасність вжитих заходів та координація дій робітників підприємства, спрямованих на отримання та додержання інструкцій, які поступають з місцевого штабу ЦО, у великій мірі і залежать від ступеню підготовленості керівництва ТОВ «Кристал» до можливості надзвичайних ситуацій, саме тому вивчання правил ЦО та проведення навчання дозволяє уникнути можливих людських жертв та зменшити можливі матеріальні збитки.
ВИСНОВКИ
У даній роботі було розглянуто питання побудови систем керування електроприводом змінного струму дизель-потягу. У роботі проведений огляд літератури на задану тематику та аналіз існуючих підходів до розв’язання найпоширеніших задач у даній галузі. Розглянуті як стандартні системи, так і альтернативні варіанти з використанням новітніх технологій, таких як нечітка логіка та нейронні мережі. Побудовані математичні моделі та структурні схеми досліджуваних об’єктів, проведене моделювання їхнього функціонування, проаналізовані отримані характеристики та оцінена робота об’єктів в цілому.
У результаті проведеного дослідження можна зробити наступні висновки:
1. При використанні математичної моделі та структури САР електропередачі дизель-потяга, виконаних у відповідності до традиційних підходів на основі використання принципу регулювання за помилкою процес розгону залежить від наступних параметрів: темпів наростання напруги живлення, завантаженості складу і закону керування. Проведене моделювання роботи такої системи довело, що при значеннях цих параметрів p/J = 0.0001; U/f = 10; темп нарощування напруги живлення ТАД – 8 B/сек процес розгону протікає нормально, але потребує подальшого уточнення та оптимізації.
2. Наступні дослідження спрямовані безпосередньо на уточнення структури САР і визначення її параметрів. Проведений ряд експериментів, у ході яких змінювалися параметри моделі (зокрема, коефіцієнти регулятора на основі пропорційно-інтегрального закону керування K1, K2, K3 та блоку задавання інтенсивності K4), показав, що від значень даних коефіцієнтів залежить якість функціонування системи. Оптимальні значення цих параметрів наступні: K1
= 2,5; K2
= 1; K3
= 0,2; K4
= 0,02. При них значення величини перерегулювання дорівнює 29,78 %; час перехідного процесу - 20 сек; число перерегулювання - 4. Два останніх показники задовольняють необхідним умовам до вимог до якісних показників перехідного процесу, перший - не задовольняє. Тому необхідно в структуру САР увести блок задавання інтенсивності зі змінною структурою.
3. Використання блоку задавання інтенсивності змінної структури поліпшує систему САР і з погляду стійкості, і з погляду якісних показників. Однак істотної зміни (зменшення) величини перерегулювання з уведенням блоку задавання інтенсивності зі змінною структурою домогтися не вдалося. При цьому встановлено, що прийнятні значення з погляду забезпечення якісних показників відповідають: при "накиданні" - Т = 12,5 секунд; при "скиданні" - Т = 50 секунд.
4. Проведені дослідження синтезованої системи векторного керування тяговим електроприводом підтвердили ефективність застосування методів нечіткої логіки при проектуванні регуляторів. Перерегулювання у випадку використання стандартного ПІ контролера складає 14%, при використанні нечіткого контролера перерегулювання практично відсутнє.
5. Введення нейронних мереж до складу системи керування дозволяє оптимізувати роботу енергетичної системи дизель-потяга в процесі розгону, забезпечуючи при цьому виконання заданих граничних умов. При цьому економія по енергетичних витратах складає не менш 3,2% у порівнянні з досліджуваним експериментальним зразком системи керування дизель-потяга.
Дослідження і моделювання проведене засобами пакету Matlab. Розроблена технічна документація містить як теоретичні обґрунтування, так і детальні описи практично проведених робіт.
ПЕРЕЛІК ВИКОРИСТОВУВАНОЇ ЛІТЕРАТУРИ
1. Михальченко Г.С., Федяева Г.А., Власов А.И. Моделирование переходных режимов в асинхронном тяговом приводе локомотивов // Вестник ВНИИЖТ. – № 4. – 2003. – С.42–47.
2. Корылов И.П. Математическое моделирование электрических машин. – М.: Высшая школа, 1987. – 216 с.
3. Horstmann Daniel, WagnerRudolf, Weigel Wolf-Dieter. 100 Jahre Entwicklung der Antriedstechnik fur electrische Bahnen. Teil 2. // Elek. Bahnen. – 2003. – № 7. – P.338–345.
4. Справочник по теории автоматического управления / Под. ред. А.А.Красовского. – М.: Наука, 1987. – 712 с.
5. Ляпунов А.М. Общая задача об устойчивости движения. – М.: Гостехиздат, 1950. – 471с.
6. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – М.: Наука, 1972.
7. Воронов В.Г., Качанов П.А., Рогачев А.И. Оптимизация технологических процессов сушки капиллярно-пористых материалов // Сборник докладов научно-технической конференции «Прогрессивные технологические процессы в приборостроении». – К.: Знание, 1977. – С.5–6.
8. Эволюционные методы компьютерного моделирования/ Верлань А.Ф., Дмитриенко В.Д., Корсунов Н.И., Шорох В.А. – Киев: Наукова думка, 1992. – 256 с.
9. Новый подход к аналитическому конструированию линейно–квадратичных регуляторов. Приложения к синтезу оптимальных следящих систем // Техническая кибернетика. – 1987. – №7. – реф. 7.81.153.
10. Баленко А.И., Заполовский Н.И. Выбор коэффициентов оптимизирующего функционала метода аналитического конструирования регуляторов по критерию обобщенной работы // Системи обробки інформації. Збірник наукових праць. Випуск №6(16). – Харьков: ХВУ. – 2001. – С.7–11.
11. Математическая теория оптимальных процессов / Л.С.Понтрягин и др. – М.: Физматгиз, 1961. – 391 с.
12. Петров Ю.П. Вариационные методы теории оптимального управления. – 2–е изд. – Л.: Энергия, 1977. – 280 с.
13. Рутковская Д., Пилиньский М., Рутковский Л. Нейронные сети, генетические алгоритмы и нечеткие системы. – М.: Горячая линия – Телеком, 2004. – 452 с.
14. Генетические алгоритмы, искусственные нейронные сети и проблемы виртуальной реальности/ Г.К. Вороновский, К.В. Махотило, С.Н. Петрашев, С.А. Сергеев. – Харьков: Основа, 1997. – 112 с.
15. Комашинский В.И., Смирнов Д.А. Нейронные сети и их применение в системах управления и связи. – М.: Горячая линия – Телеком, 2002. – 94 с.
16. Генетические алгоритмы, искусственные нейронные сети и проблемы виртуальной реальности / Вороновский Г.К., Махотило К.В., Петрашев С.Н., Сергеев С.А. – Харьков: Основа, 1997. – 112 с.
17. Verbruggen H.B., Babushka R. Constracting fuzzy models by product space cluctering // Fuzzy model identification. – Berlin: Springer, 1998. – P. 53 – 90.
18. Галушкин А.И. Нейрокомпьютеры и их применение на рубеже тысячелетий в Китае. В 2-х томах. Том 2. – М.: Горячая линия – Телеком, 2004. – 464 с.
19. Усольцев А.А. Векторное управление асинхронными двигателями. Учебное пособие по дисциплинам электромеханического цикла. C-П. 2002. – 39 с.
20. Асинхронные электроприводы с векторным управлением / Рудаков В.В., Столяров И.М., Дартау В.А. – Л.: Энергоатомиздат, 1987. – 136 с.
21. Bimal K. Bose Modern Power Electronics and AC Drives. – Prentice-Hall PTR 2002. – 738c.
22. Носков В.И., Дмитриенко В.Д., Заполовский Н.И., Леонов С.Ю. Моделирование и оптимизация систем управления и контроля локомотивов. Научное издание – Харьков: ХФИ "Транспорт Украины", 2003. – 248 с.
(синим – к разделу 3.1)
23. Ярушкина Н.Г. Основы теории нечетких и гибридных систем. – М.: Финансы и статистика, 2004. – 320 с.
24. Комашинский В.И., Смирнов Д.А. Нейронные сети и их применение в системах управления и связи. – М.: Горячая линия – Телеком, 2002. – 94 с.
25. 110. Баленко А.И., Заполовский Н.И., Пуйденко В.А. Математическая модель электропередачи дизель-поезда в режиме тяги // Вестник Харьковского государственного политехнического университета. Выпуск №27. – 1998. – С.67–71.
26. 106. Dressier Helmuk. MICAS–Mikrocomputer fur Farzeuge // Elektrische Bahnen. –1981. – V. 79. – №12. – S.411–417.
27. 44. Сандлер А.С., Сарбатов Р.С. Автоматическое частотное управление асинхронными двигателями. – М.: Энергия, 1987. – 328 с.
28. 51. Булгаков А.А. Частотное управление асинхронными двигателями. – М.: Энергоиздат, 1982. – 216 с.
29. 3. Заполовский Н.И., Носков В.И., Мезенцев Н.В., Горбач Н.В. Разработка и исследование системы управления электроприводом переменного тока с использованием методов нечеткой логики. Вестник НТУ «ХПИ». Тематический выпуск: Информатики и моделирование. – Харьков: НТУ «ХПИ». – 2006. – №23. – С. 53 – 60.
30. 80. Sauter D., Hamelin F. Frequency-domain optimization for robust fault detection and isolation in dynamic systems // IEEE Transactions on automatic control. – 1999. – Vol. AC – 44. – №4. – P.878–882.
31. СНіП 31-03-2001. Виробничі будівлі.
32. СНіП II-4-79 Природне та штучне освітлення.
33. ПУЕ – 87. Правила устрою електроустановок.
34. ОНТП 24-86. Загальносоюзні норми для технологічного проектування Визначення категорій будівель та споруд за вибуховій та пожежній безпеці.
35. ДБН В.1.1.7–2002. Державні будівельні норми України. Пожежна безпека об’єктів будівництва.
36. ГОСТ 12.1.005-88* ССБТ. Загальні санітарно-гігієнічні вимоги до повітря робочої зони.
37. ДНАОП 0.00-1.31-99. Правила охорони праці під час експлуатації електронно-обчислювальних машин.
38. ГОСТ 12.0. 003-74 ССБТ. Небезпечні та шкідливі виробничі фактори..
39. Дсанпин 3.3.2.- 007-98. Державні санітарні правила та норми роботи з візуальними дисплейними терміналами ЕОМ
40. ДНАОП 0.03-8.03-85. Перелік важких робіт та робіт із шкідливими та небезпечними умовами роботи, на яких заборонено застосовувати праці неповнолітніх.
41. ГОСТ 12.2.007.0-75 (2001). Вироби електротехнічні. Загальні вимоги безпеки.
42. ГОСТ 25861-83. Машини обчислювальні та системи обробки даних. Вимоги електричної та механічної безпеки та методи випробувань.
43. ГОСТ 12.1.030-81. Електробезпека. Захисне заземлення. Занулення. Система стандартів безпеки праці.
44. ГОСТ 12.1.029-80. (2001) ССБТ. Засоби та методи захисту від шуму. Класифікація ГОСТ ССБТ. Система стандартів безпеки праці.
45. ГОСТ 12.1.038-82* ССБТ. Електробезпека. Гранично припустимі значення напруг дотику та струмів.
46. ГОСТ 12.1.019-79 (1996) ССБТ. Електробезпека. Загальні вимоги та номенклатура видів захисту.
47. ГОСТ 12.1.045-84 ССБТ. Електростатичні поля. Припустимі рівні на робочих місцях та вимоги до проведення контролю.
48. ГОСТ 26387-84 Система "людина-машина”. Терміни та визначення.
49.ГОСТ 14254-96 Ступіні захисту, що забезпечуються оболонками(код IP).
50. ГОСТ 12.1.004-91 Система стандартів безпеки праці. Пожежна безпека. Загальні вимоги.
51. ГОСТ 12.2.032-78 ССБТ. Робоче місце при виконанні робот сидячи. Загальні ергономічні вимоги.
52. Стеблюк М.І. Цивільна оборона. Підручник. 3-тє вид., перероб. і доп. – К.: Знання, 2004. -490с.
53. Кулаков М.А. та інш. Цивільна оборона./Під ред.. проф.. Березуцького В.В. – Харків: Факт, 2008.
54. Губський А.І. Цивільна оборона. Підручник для вищих учбових закладів. -К.: Міністерство освіти, 1995. - 216с.
55. Депутат О.П. та інш. Цивільна оборона./Під ред.. Франчука, Львів: Афіша, 2000.
56. Бизнес-план – Ваша путеводная звезда. Для чего он нужен? Как его составлять? Как им пользоваться? Экономика и жизнь.- 1991. – N33.
57. Методические указания по использованию бизнес-плана в дипломном проектировании. Харьковский университет радиоэлектроники. Харьков 1992г. (Левченко Л.В. и др.)
58. Организация, планирование и управление приборостроительным предприятием. / Учебное пособие под ред. В.А.Мищенко и Н.И.Погорелова. Киев, УМК, 1992.
59. О составе затрат и единичных нормах амортизационных отчислений. Из нормативных документов. М.: Финансы и кредит, 1992.
60. Перерва П.Г. Управление промышленным маркетингом. Харьков, Основа, 1993.
61. Современный маркетинг (под ред. Е.К.Хруцкого). – М.: Прогресс, 1991
Рецензія
Дипломна робота магістра присвячена актуальній темі сьогодення як з точки зору практичного використання результатів дослідження, приведених у роботі, так і з огляду на можливість їхнього використання для подальших розробок та теоретичних досліджень. У роботі приведені аналіз існуючих підходів до рішення поставлених задач, розглянуті стандартні методи їхнього розв’язання та запропоновані альтернативні варіанти рішень із використанням новітніх технологій. Створена технічна документація містить теоретичні обґрунтування та детальних опис практично проведених експериментів. Дослідження, що проводилось в середовищі пакету Matlab, дозволило отримати результати моделювання роботи розглянутих об’єктів, числові значення їхніх основних параметрів і характеристик та зробити висновки про адекватність функціонування та відповідність поставленим цілям.
Рівень освітлення розглянутої інформації можна оцінити як високий, отримані результати моделювання як повні та вірогідні. Документація складена з додержанням до вимог ДОСТів та відповідних нормативів.
Серед недоліків роботи можна зазначити, що розглянуті види систем керування складають лише частину існуючих та побудовані структурні схеми підлягають моделюванню лише в пакеті Matlab, що певним чином обмежує можливості використання результатів проведеного дослідження.
У цілому робота може бути оцінена на «відмінно», а студентці Xxxxx xxx присвоєно кваліфікацію інженера-системного аналітика-дослідника.
|
