| АВТОМАТИЗОВАНА СИСТЕМА КЕРУВАННЯ ПОТОКАМИ ПОТУЖНОСТІ У СКЛАДНОЗАМКНЕНИХ ЕЕС
Зміст
Вступ
1. Визначення функціональної і технічної структури АСУ диспетчерського центру електроенергетичної системи
1.1 Функціональна структура АСУ
1.2 Технічна структура АСУ
2. Розробка структури збирання і передачі інформації. Формування бази даних
3. Формування складу технологічних задач
4. Трирівневе графічне представлення заданої ЕС
5. Розрахунок і вибір складу керувальних пристроїв
6. Визначення налагоджувальних параметрів САК потоками потужності в замкнених контурах ЕС
7. Оптимальне керування режимом ЕС в темпі процесу
8. Техніко-економічний ефект оптимального керування
Висновки
Література
Вступ
Електроенергетика є однією з найважливіших складових частин економіки держави, надійна і ефективна робота якої в значній мірі забезпечує ритмічність і якісні показники роботи інших галузей. У складі електроенергетичного комплексу значну частину займають електроенергетичні системи, електричні мережі (ЕМ) яких розподілені на всій території країни.
Електроенергетична система (ЕЕС) являє собою складну технічну систему, що характеризується безупинним технологічним процесом виробництва, передачі, розподілу і споживання електричної енергії, ієрархічною багаторівневою системою управління, реалізованою в рамках єдиного завдання забезпечення безперебійного постачання споживачів електроенергією.
Характерною рисою розвитку електроенергетики за останні кілька десятків років є активна діяльність щодо удосконалення структури оперативно-диспетчерського управління ЕМ та реконструкції їх диспетчерських центрів (ДЦ). Ця робота, що проводиться як в Україні, так і за кордоном, базується на технічних засобах збору, обробки і відображення інформації, що постійно удосконалюються. Технічною основою реконструкції систем диспетчерського управління є інформаційно-обчислювальні комплекси (ІОК), що включають ЕОМ різної структури і продуктивності, мікропроцесорні системи телемеханіки, високопродуктивні системи передачі даних, сучасні засоби відображення інформації. Реконструкція ДЦ, що починається, як правило, з вищих рівнів управління, у даний час усе більше поширюється на нижчі рівні аж до районів ЕМ.
На основі ІОК і сучасного прикладного програмного забезпечення докорінно перетворюються й удосконалюються автоматизовані системи диспетчерського управління (АСДУ). Таким чином, ця робота сприятиме підвищенню надійності та економічності роботи енергосистем України при одночасному підвищенні якості роботи оперативного персоналу ДЦ.
Реклама

Одним з напрямків реконструкції і модернізації АСДУ є заміна морально і фізично застарілих засобів відображення інформації сучасними моніторами з електронно-променевими трубками, рідкокристалічними і плазменими панелями. Включення до контуру управління високоефективних засобів графічного відображення інформації дозволяє розширити коло задач, автоматично розв'язуваних ІОК АСДУ.
У цьому контексті актуальним є виконання теоретичних досліджень і практичних розробок щодо проблеми обробки і відображення інформації з метою підвищення оперативності та надійності управління електричною мережею за рахунок максимально можливого переносу графічної інформації на машинні носії, її обробки і подання в електронному вигляді.
Курсова робота спрямована на проведення теоретичних досліджень і створення інструментальних засобів, що поліпшують обробку і візуальне сприйняття графічної інформації, зменшують кількість помилок при аналізі оперативних даних і розширюють клас задач, автоматично розв'язуваних ІОК АСДУ.
1. Визначення функціональної і технічної структури асу диспетчерського центру електроенергетичної системи
1.1 Функціональна структура АСУ
Функціональна частина АСУ складається з набору взаємозв'язаних програм для реалізації конкретних функцій управління (планування, фінансово-бухгалтерську діяльність та ін.). Усі завдання функціональної частини базуються на загальних для цієї АСУ інформаційних масивах і на загальних технічних засобах. Включення в систему нових завдань не впливає на структуру основи і здійснюється за допомогою типового для АСУ інформаційного формату і процедурної схеми. Функціональну частину АСУ прийнято умовно ділити на підсистеми відповідно до основних функцій управління об'єктом. Підсистеми у свою чергу ділять на комплекси, що містять набори програм для вирішення конкретних завдань управління відповідно до загальної концепції системи. Склад завдань функціональної частини АСУ визначається типом керованого об'єкту, його станом і видом виконуваних ним завдань. Наприклад, в АСУ підприємством часто виділяють наступні підсистеми: технічної підготовки виробництва; управління якістю продукції; техніко-економічного планування; оперативно-виробничого планування; матеріально-технічного забезпечення; збуту продукції; фінансово-бухгалтерській діяльності; планування і розставляння кадрів; управління транспортом; управління допоміжними службами. Ділення функціональної частини АСУ на підсистеми дуже умовно, оскільки процедури усіх підсистем тісно взаємозв'язані і у ряді випадків неможливо провести чітку межу між різними функціями управління (наприклад, між техніко-економічним плануванням, оперативно-виробничим плануванням і матеріально-технічним забезпеченням). Виділення підсистем використовується для зручності розподілу робіт із створення системи і для прив'язки до відповідних організаційних ланок об'єкту управління. Структура функціональної частини АСУ залежить від схеми процедур управління, що визначає взаємозв'язок усіх елементів управління і що охоплює автоматизовані, частково механізовані і ручні процедури. Функціональна частина мобільніша, ніж основа, і допускає зміна складу і постановки завдань за умови забезпечення стандартного сполучення з базовими елементами системи.
Реклама

1.2 Технічна структура АСУ
Технічна база АСУ включає засоби обробки, збору і реєстрації, відображення і передачі даних, а також старанні механізми, що безпосередньо впливають на об'єкти управління (наприклад, автоматичні регулювальники, датчики і так далі), що забезпечують збір, зберігання і переробку інформації, а також вироблення регулюючих сигналів в усіх контурах автоматизованого управління виробництвом. Основні елементи технічної бази – ЕОМ, які забезпечують накопичення, зберігання і обробку даних, циркулюючих в АСУ. ЕОМ дозволяють оптимізувати параметри управління, моделювати виробництво, готувати пропозиції для ухвалення рішення. Зазвичай виділяють два класи ЕОМ, використовуваних в АСУ,: інформаційно-розрахункові і обліково-регулюючі. Інформаційно-розрахункові ЕОМ знаходяться на вищому рівні ієрархії управління (наприклад, в координаційно-обчислювальному центрі заводу) і забезпечують рішення завдань, пов'язаних з централізованим управлінням об'єктом по основних планово-економічних, забезпечуючих і звітних функціях (техніко-економічне і оперативно-виробниче планування, матеріально-технічне постачання, збут продукції і так далі). Вони характеризуються високою швидкодією, наявністю системи переривань, складовою обробкою даних, змінною довжиною слова, мультипрограмним режимом роботи і так далі, а також широким набором і великим об'ємом пристроїв (оперативних, буферних, зовнішніх, односторонніх і двосторонніх, з довільним і послідовним доступом), що запам'ятовують. Обліково-регулюючі ЕОМ, як правило, відносяться до нижнього рівня управління. Вони розміщуються зазвичай в цехах або на ділянках і забезпечують збір інформації від об'єктів управління (верстатів, складів і так далі), первинну переробку цієї інформації, передачу даних в інформаційно-розрахункову ЕОМ і отримання від неї директивно-плановій інформації, здійснення локальних розрахунків (наприклад, розклади роботи кожного верстата і робітника, графіка подачі комплектуючих виробів і матеріалів, угрупування деталей в партії, режимів обробки і так далі) і вироблення дій, що управляють, на об'єкти управління при відхиленні режимів їх функціонування від розрахункових. Особливість обліково-регулюючих ЕОМ – добре розвинена система автоматичного сполучення з великим числом джерел інформації (датчиків, реєстраторів) і регулюючих пристроїв. Їх обчислювальна частина менш розвинена, оскільки первинно оброблена інформація передається в ЕОМ верхнього рівня для подальшого використання і тривалого зберігання. Приклади обліково-регулюючих ЦВМ – «Дніпро» і М – 6000 [7].
Засоби збору і реєстрації даних за участю людини включають різні реєстратори виробництва, за допомогою яких здійснюються збір і реєстрація даних безпосередньо на робочих місцях (наприклад, в цеху, на ділянці, верстаті), а також датчики (температури, кількості виготовлених деталей, часу роботи устаткування і так далі), фіксатори порушень встановленого технологічного і організаційного ритму (відсутність заготівель, інструменту, матеріалів, неправильна наладка верстатів, відсутність транспортних засобів для відправки готової продукції і так далі). Наприклад, типовими реєстраторами виробництва є пристрої РИ – 7501 (цеховий реєстратор) і РИ – 7401 (складський реєстратор) [7].
Засоби відображення інформації призначені для представлення результатів обробки інформації в зручному для практичного використання виді. До них відносяться різні друкуючі пристрої, що пишуть машини, термінали, екрани, табло, графічні пристрої, індикатори і тому подібне. Ці пристрої, як правило, безпосередньо пов'язані з ЕОМ або з реєстраторами виробництва і видають або регулярну (регламентну), або епізодичну (за запитом або у разі аварійної ситуації) довідкову, директивну або попереджувальну інформацію.
Апаратура передачі даних здійснює обмін інформацією між різними елементами АСУ (між реєстраторами виробництва і ЕОМ, між центром, що координаційно-управляє, і цеховими ЕОМ і так далі), а також між АСУ і суміжними управління рівнями (наприклад, між АСУП і ОАСУ, між територіальними обчислювальними центрами).
До технічної бази АСУ відносять також засоби оргтехніки (копіювально-розмножувальну техніку, картотеки, диктофони і так далі), а також допоміжні і контрольно-вимірювальні засоби, що забезпечують нормальне функціонування основних технічних засобів в необхідних режимах.
Перспективним напрямом розвитку АСУ є створення Загальнодержавної автоматизованої системи управління (ЗДАСУ), що передбачає взаємний зв'язок управління усіма енергетичними об'єктами країни з метою забезпечення оптимальних пропорцій розвитку енергетичного господарства України, вироблення збалансованих планових завдань і їх безумовного виконання. Технічною базою ЗДАСУ стане Єдина державна мережа обчислювальних центрів, що здійснює інформаційну і функціональну координацію роботи центрів країни.
2. Розробка структури збирання і передачі інформації. формування бази даних
Система збору даних і оперативного диспетчерського управління повинна забезпечувати виконання слідуючих основних функцій[9]:
– прийом інформації про контрольовані технологічні параметри від контролерів нижніх рівнів і давачів;
– збереження прийнятої інформації в архівах;
– графічне представлення перебігу технологічного процесу, а також архівної інформації в зручній для сприйняття формі;
– сприйняття команд оператора і передача їх в адрес контролерів нижніх рівнів і виконавчих механізмів;
– реєстрацію подій, пов’язаних з технологічним процесом і діями обслуговуючого персоналу;
– оповіщення експлуатаційного і обслуговуючого персоналу про виявленні аварійні події, пов’язані з контрольованим технологічним процесом і функціонуванням програмно-апаратних засобів АСУ ТП із реєстрацією дій персоналу в аварійних ситуаціях;
– довільне відображення архівної інформації з можливістю одночасного представлення у різних формах і декількох екземплярах з метою порівняння.
Передаються такі види оперативної інформації: телевиміри ТВ; телесигнали ТС; псевдовиміри ПВ; алфавітно-цифрова інформація АЦІ;
службова інформація.
Джерелами ТВ, ТС є датчики-перетворювачі активної і реактивної потужності, струму, напруги, частоти, а також контакти реле-повторювачів положення високовольтних вимикачів і роз'єднувачів.
Для збирання та передачі оперативно – диспетчерської інформації в енергетиці використовують канали зв'язку та апаратуру зв'язку, телемеханіки, передачі даних.
Збір інформації та організацію контролю проводять так (рисунок 2.1) [6]:

Рисунок 2.1 – Організація інформаційних потоків
Для зменшення обсягів інформації, що підлягають обробці на ОЦ енергосистеми, і упорядкування потоків даних в енергосистемах створюються ієрархічні структури збору й обробки організаційно-економічної інформації. Первинна обробка значної частини інформації виробляється на місцях її виникнення – на энергооб'єктах. Там створюються пункти збору, первинної обробки і передачі даних.
Відбір інформації здійснюється за допомогою первинних перетворювачів – датчиків. Квантування – перетворення вхідної неперервної величини в ряд дискретних значень (виконується на базі АЦП). Кодування – перетворення повідомлення у сигнал за допомогою кодерів. Модуляція – перетворення сигналу для передачі. Передача інформації за допомогою ліній зв'язку. Демодуляція – дія обернена до модуляції. Операції з інформацією – за допомогою обчислювального комплексу. Декодування – перетворення сигналів в повідомлення.
Структура системи збору й обробки інформації визначається з урахуванням адміністративного розподілу території, що обслуговується енергосистемою, віддаленістю енергооб'єктів від ОЦ енергосистеми, масштабів і числа підприємств, що входять до складу енергосистеми, наявності каналів зв'язку.
Периферійні пункти оснащуються найпростішими обчислювальними машинами, опорні пункти – ЕОМ середньої продуктивності. При створенні АСУ энергооб'єкта доцільно сполучати технічні засоби для виконання функцій як АСУ об'єкта, так і периферійного пункту.
В ЕЕС організуються периферійні пункти двох типів:
1 Первині пункти. На них виробляються прийом, первинна обробка документів, контроль і виправлення помилок, перенос інформації на машинні носії, передача інформації в опорний пункт безпосередньо в ОЦ енергосистеми і місцеву обробку частини інформації, що надійшла.
2 Опорні пункти (філії ОЦ енергосистеми). На них виробляються прийом інформації від первинних пунктів і передача її в ОЦ енергосистеми, місцева обробка частини інформації, що надійшла, з видачею зведених даних в ОЦ і результатів на первинні пункти.
У диспетчерських центрах вищого рівня встановлюються засоби прийому-передачі інформації. Це набір технічних засобів, які забезпечують одержання інформації згідно затверджених протоколів обміну (телевиміри, текстові повідомлення, голосові повідомлення), а також передачу керувальних команд на пристрої логічного та автоматичного управління.
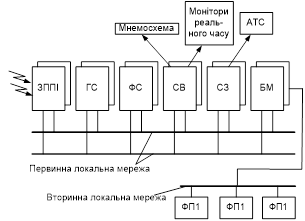
Рисунок 2.2 – Засоби прийому-передачі інформації [6]
Головний сервер (ГС) – пристрій, що забезпечує керування всіма засобами, які приєднані до первинної локальної мережі.
Файловий сервер (ФС) – зберігає інформацію в архівах, забезпечує доступ до неї.
Сервер відображення (СВ) – дає змогу відобразити отриману інформацію на моніторах реального часу і мнемосхемах.
Сервер зв’язку (СЗ) – призначений для організації обміну інформацією між інформаційними системами свого ієрархічного рівня та вищих рівнів. Також використовується як резервний засіб прийому та передачі інформації.
Браунд маур (БМ) – пристрій для розподілення прав доступу до інформації.
ФП – функціональні підрозділи.
Проектована схема складається з 21 вузла і 27 віток. До балансуючого вузла 1 підходить 4 вітки. Об'єм ТВ визначимо:
к = 2·27–1+4 = 57
Об'єм телесигналів визначається типом підстанцій, розташованих у вузлах схеми, і залежить від кількості комутуючих пристроїв, розміщених на цих підстанціях. Типи підстанцій для схеми не задані, але відомі рівні напруг вузлів. Згідно з цими напругами приймемо, що на стороні 110 кВ встановлена схема підстанції – подвійна система шин з обхідною, а на стороні 330 кВ – чотирикутник.
Кількість вимикачів, встановлених в схемі, складає 84. Для контролю за їхнім станом необхідно збирати 84 ТС.
Інформацію про ТВ необхідно накопичувати по мірі її надходження в відповідній БД, структуру якої необхідно розробити.
Інформацію по ТВ будемо зберігати в реляційній БД у вигляді таблиці. Кожний запис в БД віднесемо до часу надходження інформації, тобто внесемо в БД мітку часу. Структура БД для заданої схеми буде мати наступний вигляд (таблиця 2.1).
Індекс «п» позначає, що данні знімаються з датчика, розташованого на початку відповідної вітки, індекс «к» – на кінці.
Таблиця 2.1 – Структура бази даних для заданого варіанту схеми
| Джерело
|
Назва поля
|
Тип поля
|
Примітки
|
| Таймер
|
Т
|
Date time
|
Час оновлення
|
| 40–26п
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р40
|
Real
|
Вимірювальна активна потужність у вузлі 40
|
| |
Q40
|
Real
|
Вимірювальна реактивна потужність у вузлі 40
|
| |
P40–26
|
Real
|
Перетік активної потужності з боку вузла 40
|
| |
Q40–26
|
Real
|
Перетік реактивної потужності з боку вузла 40
|
| 40–26к
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р26
|
Real
|
Вимірювальна активна потужність у вузлі 26
|
| |
Q26
|
Real
|
Вимірювальна реактивна потужність у вузлі 26
|
| |
P26–40
|
Real
|
Перетік активної потужності з боку вузла 26
|
| |
Q26–40
|
Real
|
Перетік реактивної потужності з боку вузла 26
|
| 26–100п
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р26
|
Real
|
Вимірювальна активна потужність у вузлі 26
|
| |
Q26
|
Real
|
Вимірювальна реактивна потужність у вузлі 26
|
| |
P26–100
|
Real
|
Перетік активної потужності з боку вузла 26
|
| |
Q26–100
|
Real
|
Перетік реактивної потужності з боку вузла 26
|
| 26–100к
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р100
|
Real
|
Вимірювальна активна потужність у вузлі 100
|
| |
Q100
|
Real
|
Вимірювальна реактивна потужність у вузлі 100
|
| |
P100–26
|
Real
|
Перетік активної потужності з боку вузла 100
|
| |
Q100–26
|
Real
|
Перетік реактивної потужності з боку вузла 100
|
| 26–22п
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р26
|
Real
|
Вимірювальна активна потужність у вузлі 26
|
| |
Q26
|
Real
|
Вимірювальна реактивна потужність у вузлі 26
|
| |
P26–22
|
Real
|
Перетік активної потужності з боку вузла 26
|
| |
Q26–22
|
Real
|
Перетік реактивної потужності з боку вузла 26
|
| 26–22к
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р22
|
Real
|
Вимірювальна активна потужність у вузлі 22
|
| |
Q22
|
Real
|
Вимірювальна реактивна потужність у вузлі 22
|
| |
P22–26
|
Real
|
Перетік активної потужності з боку вузла 22
|
| |
Q22–26
|
Real
|
Перетік реактивної потужності з боку вузла 22
|
| 26–1п
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р26
|
Real
|
Вимірювальна активна потужність у вузлі 26
|
| |
Q26
|
Real
|
Вимірювальна реактивна потужність у вузлі 26
|
| |
P26–1
|
Real
|
Перетік активної потужності з боку вузла 26
|
| |
Q26–1
|
Real
|
Перетік реактивної потужності з боку вузла 26
|
| 26–1к
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р1
|
Real
|
Вимірювальна активна потужність у вузлі 1
|
| |
Q1
|
Real
|
Вимірювальна реактивна потужність у вузлі 1
|
| |
P1–26
|
Real
|
Перетік активної потужності з боку вузла 1
|
| |
Q1–26
|
Real
|
Перетік реактивної потужності з боку вузла 1
|
| 22–1п
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р22
|
Real
|
Вимірювальна активна потужність у вузлі 22
|
| |
Q22
|
Real
|
Вимірювальна реактивна потужність у вузлі 22
|
| |
P22–1
|
Real
|
Перетік активної потужності з боку вузла 22
|
| |
Q22–1
|
Real
|
Перетік реактивної потужності з боку вузла 22
|
| 22–1к
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р1
|
Real
|
Вимірювальна активна потужність у вузлі 1
|
| |
Q1
|
Real
|
Вимірювальна реактивна потужність у вузлі 1
|
| |
P1–22
|
Real
|
Перетік активної потужності з боку вузла 1
|
| |
Q1–22
|
Real
|
Перетік реактивної потужності з боку вузла 1
|
| 1–50п
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р1
|
Real
|
Вимірювальна активна потужність у вузлі 1
|
| |
Q1
|
Real
|
Вимірювальна реактивна потужність у вузлі 1
|
| |
P1–50
|
Real
|
Перетік активної потужності з боку вузла 1
|
| |
Q1–50
|
Real
|
Перетік реактивної потужності з боку вузла 1
|
| 1–50к
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р50
|
Real
|
Вимірювальна активна потужність у вузлі 50
|
| |
Q50
|
Real
|
Вимірювальна реактивна потужність у вузлі 50
|
| |
P50–1
|
Real
|
Перетік активної потужності з боку вузла 50
|
| |
Q50–1
|
Real
|
Перетік реактивної потужності з боку вузла 50
|
| 50–10п
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р50
|
Real
|
Вимірювальна активна потужність у вузлі 50
|
| |
Q50
|
Real
|
Вимірювальна реактивна потужність у вузлі 50
|
| |
P50–10
|
Real
|
Перетік активної потужності з боку вузла 50
|
| |
Q50–10
|
Real
|
Перетік реактивної потужності з боку вузла 50
|
| 50–10к
|
330
|
Real
|
Вимірювальна напруга
|
| |
Р10
|
Real
|
Вимірювальна активна потужність у вузлі 10
|
| |
Q10
|
Real
|
Вимірювальна реактивна потужність у вузлі 10
|
| |
P10–50
|
Real
|
Перетік активної потужності з боку вузла 10
|
| |
Q10–50
|
Real
|
Перетік реактивної потужності з боку вузла 10
|
| 30–97п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р30
|
Real
|
Вимірювальна активна потужність у вузлі 30
|
| |
Q30
|
Real
|
Вимірювальна реактивна потужність у вузлі 30
|
| |
P30–97
|
Real
|
Перетік активної потужності з боку вузла 30
|
| |
Q30–97
|
Real
|
Перетік реактивної потужності з боку вузла 30
|
| 30–97к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р97
|
Real
|
Вимірювальна активна потужність у вузлі 97
|
| |
Q97
|
Real
|
Вимірювальна реактивна потужність у вузлі 97
|
| |
P97–30
|
Real
|
Перетік активної потужності з боку вузла 97
|
| |
Q97–30
|
Real
|
Перетік реактивної потужності з боку вузла 97
|
| 97–37п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р97
|
Real
|
Вимірювальна активна потужність у вузлі 97
|
| |
Q97
|
Real
|
Вимірювальна реактивна потужність у вузлі 97
|
| |
P97–37
|
Real
|
Перетік активної потужності з боку вузла 97
|
| |
Q97–37
|
Real
|
Перетік реактивної потужності з боку вузла 97
|
| 97–37к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р37
|
Real
|
Вимірювальна активна потужність у вузлі 37
|
| |
Q37
|
Real
|
Вимірювальна реактивна потужність у вузлі 37
|
| |
P37–97
|
Real
|
Перетік активної потужності з боку вузла 37
|
| |
Q37–97
|
Real
|
Перетік реактивної потужності з боку вузла 37
|
| 97–98п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р97
|
Real
|
Вимірювальна активна потужність у вузлі 97
|
| |
Q97
|
Real
|
Вимірювальна реактивна потужність у вузлі 97
|
| |
P97–98
|
Real
|
Перетік активної потужності з боку вузла 97
|
| |
Q97–98
|
Real
|
Перетік реактивної потужності з боку вузла 97
|
| 97–98к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р98
|
Real
|
Вимірювальна активна потужність у вузлі 98
|
| |
Q98
|
Real
|
Вимірювальна реактивна потужність у вузлі 98
|
| |
P98–97
|
Real
|
Перетік активної потужності з боку вузла 98
|
| |
Q98–97
|
Real
|
Перетік реактивної потужності з боку вузла 98
|
| 98–25п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р98
|
Real
|
Вимірювальна активна потужність у вузлі 98
|
| |
Q98
|
Real
|
Вимірювальна реактивна потужність у вузлі 98
|
| |
P98–25
|
Real
|
Перетік активної потужності з боку вузла 98
|
| |
Q98–25
|
Real
|
Перетік реактивної потужності з боку вузла 98
|
| 98–25к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р25
|
Real
|
Вимірювальна активна потужність у вузлі 25
|
| |
Q25
|
Real
|
Вимірювальна реактивна потужність у вузлі 25
|
| |
P25–98
|
Real
|
Перетік активної потужності з боку вузла 25
|
| |
Q25–98
|
Real
|
Перетік реактивної потужності з боку вузла 25
|
| 25–2п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р25
|
Real
|
Вимірювальна активна потужність у вузлі 25
|
| |
Q25
|
Real
|
Вимірювальна реактивна потужність у вузлі 25
|
| |
P25–2
|
Real
|
Перетік активної потужності з боку вузла 25
|
| |
Q25–2
|
Real
|
Перетік реактивної потужності з боку вузла 25
|
| 25–2к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р2
|
Real
|
Вимірювальна активна потужність у вузлі 2
|
| |
Q2
|
Real
|
Вимірювальна реактивна потужність у вузлі 2
|
| |
P2–25
|
Real
|
Перетік активної потужності з боку вузла 2
|
| |
Q2–25
|
Real
|
Перетік реактивної потужності з боку вузла 2
|
| 37–99п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р37
|
Real
|
Вимірювальна активна потужність у вузлі 37
|
| |
Q37
|
Real
|
Вимірювальна реактивна потужність у вузлі 37
|
| |
P37–99
|
Real
|
Перетік активної потужності з боку вузла 37
|
| |
Q37–99
|
Real
|
Перетік реактивної потужності з боку вузла 37
|
| 37–99к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р99
|
Real
|
Вимірювальна активна потужність у вузлі 99
|
| |
Q99
|
Real
|
Вимірювальна реактивна потужність у вузлі 99
|
| |
P99–37
|
Real
|
Перетік активної потужності з боку вузла 99
|
| |
Q99–37
|
Real
|
Перетік реактивної потужності з боку вузла 99
|
| 99–2п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р99
|
Real
|
Вимірювальна активна потужність у вузлі 99
|
| |
Q99
|
Real
|
Вимірювальна реактивна потужність у вузлі 99
|
| |
P99–2
|
Real
|
Перетік активної потужності з боку вузла 99
|
| |
Q99–2
|
Real
|
Перетік реактивної потужності з боку вузла 99
|
| 99–2к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р2
|
Real
|
Вимірювальна активна потужність у вузлі 2
|
| |
Q2
|
Real
|
Вимірювальна реактивна потужність у вузлі 2
|
| |
P2–99
|
Real
|
Перетік активної потужності з боку вузла 2
|
| |
Q2–99
|
Real
|
Перетік реактивної потужності з боку вузла 2
|
| 2–63п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р2
|
Real
|
Вимірювальна активна потужність у вузлі 2
|
| |
Q2
|
Real
|
Вимірювальна реактивна потужність у вузлі 2
|
| |
P2–63
|
Real
|
Перетік активної потужності з боку вузла 2
|
| |
Q2–63
|
Real
|
Перетік реактивної потужності з боку вузла 2
|
| 2–63к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р63
|
Real
|
Вимірювальна активна потужність у вузлі 63
|
| |
Q63
|
Real
|
Вимірювальна реактивна потужність у вузлі 63
|
| |
P63–2
|
Real
|
Перетік активної потужності з боку вузла 63
|
| |
Q63–2
|
Real
|
Перетік реактивної потужності з боку вузла 63
|
| 2–62п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р2
|
Real
|
Вимірювальна активна потужність у вузлі 2
|
| |
Q2
|
Real
|
Вимірювальна реактивна потужність у вузлі 2
|
| |
P2–62
|
Real
|
Перетік активної потужності з боку вузла 2
|
| |
Q2–62
|
Real
|
Перетік реактивної потужності з боку вузла 2
|
| 2–62к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р62
|
Real
|
Вимірювальна активна потужність у вузлі 62
|
| |
Q62
|
Real
|
Вимірювальна реактивна потужність у вузлі 62
|
| |
P62–2
|
Real
|
Перетік активної потужності з боку вузла 62
|
| |
Q62–2
|
Real
|
Перетік реактивної потужності з боку вузла 62
|
| 64–63п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р64
|
Real
|
Вимірювальна активна потужність у вузлі 64
|
| |
Q64
|
Real
|
Вимірювальна реактивна потужність у вузлі 64
|
| |
P64–63
|
Real
|
Перетік активної потужності з боку вузла 64
|
| |
Q64–63
|
Real
|
Перетік реактивної потужності з боку вузла 64
|
| 64–63к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р63
|
Real
|
Вимірювальна активна потужність у вузлі 63
|
| |
Q63
|
Real
|
Вимірювальна реактивна потужність у вузлі 63
|
| |
P63–64
|
Real
|
Перетік активної потужності з боку вузла 63
|
| |
Q63–64
|
Real
|
Перетік реактивної потужності з боку вузла 63
|
| 63–62п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р63
|
Real
|
Вимірювальна активна потужність у вузлі 63
|
| |
Q63
|
Real
|
Вимірювальна реактивна потужність у вузлі 63
|
| |
P63–62
|
Real
|
Перетік активної потужності з боку вузла 63
|
| |
Q63–62
|
Real
|
Перетік реактивної потужності з боку вузла 63
|
| 63–62к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р62
|
Real
|
Вимірювальна активна потужність у вузлі 62
|
| |
Q62
|
Real
|
Вимірювальна реактивна потужність у вузлі 62
|
| |
P62–63
|
Real
|
Перетік активної потужності з боку вузла 62
|
| |
Q62–63
|
Real
|
Перетік реактивної потужності з боку вузла 62
|
| 64–49п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р64
|
Real
|
Вимірювальна активна потужність у вузлі 64
|
| |
Q64
|
Real
|
Вимірювальна реактивна потужність у вузлі 64
|
| |
P64–49
|
Real
|
Перетік активної потужності з боку вузла 64
|
| |
Q64–49
|
Real
|
Перетік реактивної потужності з боку вузла 64
|
| 64–49к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р49
|
Real
|
Вимірювальна активна потужність у вузлі 49
|
| |
Q49
|
Real
|
Вимірювальна реактивна потужність у вузлі 49
|
| |
P49–64
|
Real
|
Перетік активної потужності з боку вузла 49
|
| |
Q49–64
|
Real
|
Перетік реактивної потужності з боку вузла 49
|
| 49–69п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р49
|
Real
|
Вимірювальна активна потужність у вузлі 49
|
| |
Q49
|
Real
|
Вимірювальна реактивна потужність у вузлі 49
|
| |
P49–69
|
Real
|
Перетік активної потужності з боку вузла 49
|
| |
Q49–69
|
Real
|
Перетік реактивної потужності з боку вузла 49
|
| 49–69к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р69
|
Real
|
Вимірювальна активна потужність у вузлі 69
|
| |
Q69
|
Real
|
Вимірювальна реактивна потужність у вузлі 69
|
| |
P69–49
|
Real
|
Перетік активної потужності з боку вузла 69
|
| |
Q69–49
|
Real
|
Перетік реактивної потужності з боку вузла 69
|
| 69–71п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р69
|
Real
|
Вимірювальна активна потужність у вузлі 69
|
| |
Q69
|
Real
|
Вимірювальна реактивна потужність у вузлі 69
|
| |
P69–71
|
Real
|
Перетік активної потужності з боку вузла 69
|
| |
Q69–71
|
Real
|
Перетік реактивної потужності з боку вузла 69
|
| 69–71к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р71
|
Real
|
Вимірювальна активна потужність у вузлі 71
|
| |
Q71
|
Real
|
Вимірювальна реактивна потужність у вузлі 71
|
| |
P71–69
|
Real
|
Перетік активної потужності з боку вузла 71
|
| |
Q71–69
|
Real
|
Перетік реактивної потужності з боку вузла 71
|
| 71–11п
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р71
|
Real
|
Вимірювальна активна потужність у вузлі 71
|
| |
Q71
|
Real
|
Вимірювальна реактивна потужність у вузлі 71
|
| |
P71–11
|
Real
|
Перетік активної потужності з боку вузла 71
|
| |
Q71–11
|
Real
|
Перетік реактивної потужності з боку вузла 71
|
| 71–11к
|
110
|
Real
|
Вимірювальна напруга
|
| |
Р11
|
Real
|
Вимірювальна активна потужність у вузлі 11
|
| |
Q11
|
Real
|
Вимірювальна реактивна потужність у вузлі 11
|
| |
P11–71
|
Real
|
Перетік активної потужності з боку вузла 11
|
| |
Q11–71
|
Real
|
Перетік реактивної потужності з боку вузла 11
|
Таким чином, в даному розділі розроблено структуру збору і передачі інформації, визначено вимоги до системи збирання, необхідний об'єм ТВ і ТС, визначено структуру БД, призначеної для зберігання ТВ. Отримані результати є основою для подальшого аналізу режимів роботи ЕС, визначення складу КП і реалізації оптимального керування в системі АСДУ.
3. Формування складу технологічних задач
Для формування технологічних задач АСУ їх умовно розділили на інформаційні задачі оперативного управління та аналітичні задачі оперативного автоматичного управління, а також задачі автоматичного керування.
В свою чергу, кожна задача може складатися з ряду функціонально завершених блоків, інформаційно-зв’язаних між собою, з диспетчером і об’єктом управління. До того ж, всі задачі поділяються на задачі, що вирішуються ОІУК автоматично (з заданим циклом) і задачі, запуск яких виконується диспетчером по мірі необхідності.
Група інформаційних задач за допомогою різноманітних засобів відображення (мнемосхем, приладів, дисплеїв і т. ін.) забезпечує диспетчера інформацією, необхідною йому для оперативного контролю поточного режиму роботи енергосистеми, ретроспективного аналізу, а також здійснює автоматичне або за запитом формування звітної диспетчерської документації. Крім того, частина цієї інформації використовується в якості вхідних даних для вирішення задач планування режимів, виробничо-статистичної звітності і ін. В процесі утворення і розвитку оперативного управління саме ця задача є базовою і являє собою необхідний мінімум автоматизації оперативного управління на підставі інформації, що формується цією задачею, диспетчер робить висновок про припустимість або неприпустимість режиму, приймає рішення про необхідність його зміни, визначає обсяг і місце додатку необхідних для цього керуючих впливів (КП) і передає КП на об’єкт управління. При визначенні КП диспетчер керується, як правило, власним досвідом, диспетчерськими інструкціями, розрахунками, заздалегідь проведеними робітниками технологічних служб і т.ін. [1].
В ряді випадків КП, вибрані диспетчером, можуть виявитися неоптимальними, недостатніми, а інколи і неправильними. Крім того, навіть володіючи вичерпною інформацією про параметри режиму, диспетчер не завжди в стані вчасно оцінити необхідність змінити його. Для ліквідації або істотного зменшення імовірності виникнення подібних ситуацій перевизначені аналітичні задачі оперативного управління. Ці задачі допомагають диспетчеру: ідентифікувати режим з точки зору надійності (нормальний, обтяжений) і економічності або ідентифікувати ситуацію (наприклад, визначити причину різкої зміни режиму); змоделювати (оцінити) наслідки тих або інших КП; вибрати КП, необхідні для досягнення заданих критеріїв якості, надійності або економічності режиму.
Структура комплексу задач інформаційно-керуючих підсистем ОІУК наведена на рисунку 3.1.
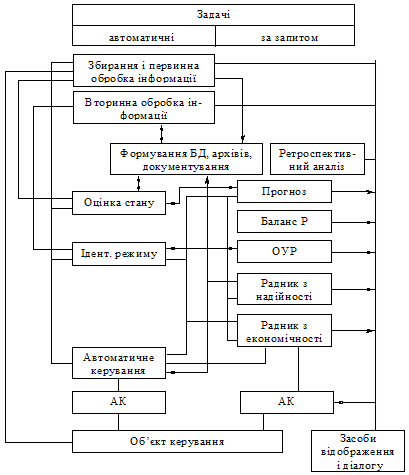
Рисунок 3.1. Структура комплексу задач оперативного і автоматичного керування
Задачі автоматичного управління, що реалізуються за допомогою ОІУК, перевизначені для автоматичного управління в нормальному (системи регулювання частоти і перетоків активної потужності АРЧП, системи регулювання напруги) і аварійному (системи, що координують протиаварійну автоматику) режимах. В контурі автоматичного управління роль диспетчера зводиться до контролю за станом і настройкою системи. А також до корекції їхніх уставок.
Таким чином, в даному розділі вибрано технічну і функціональну структуру АСУ. Для заданої схеми сформовано комплекс функціональних задач, які реалізуються в проектованій АСУ. Забезпечено необхідний рівень надійності функціонування АСУ за рахунок використання двома шинного комплексу і резервованої схеми їх підключення. Визначено особливості реалізації цих задач [1].
4 Трирівневе графічне представлення заданої ЕС
Для виконання розрахунку усталеного режиму ЕС та проведення оптимізаційних розрахунків за допомогою програмного комплексу АЧП необхідно створити файл вхідних даних, у якому містяться відомості про параметри ЕС.
В завданні подані відомості про ЕС у вигляді мнемосхеми мережі, для якої відомі навантаження у вузлах та поздовжні параметри віток – перехідні опори, тип та параметри РПН трансформаторів і параметри вузлів схеми ЕМ. Як відомо, до адекватної схеми заміщення ЛЕП крім поздовжніх параметрів входить також поперечна ємнісна провідність, яка визначає зарядну потужність ЛЕП. Ці дані в завданні подані опосередковано, тому для їх числового представлення слід визначити довжину та конструкцію ЛЕП, а звідси – їх питомі та загальні ємнісні провідності.
Наприклад, для лінії 30–97:
активний опір R = 1,6 Ом, індуктивний – Х = 3,7 Ом; напруга лінії–110 кВ;
Довжину лінії визначимо за формулою:
 (4.1) (4.1)
де х0 = 0,413 Ом/км для ЛЕП 110 кВ (для 330 кВ – 0,331Ом/км).
Питомий активний опір лінії:
 (4.2) (4.2)
 ; ;
Отже можна стверджувати, що лінія виконана проводом марки АС-185/29, її питома провідність b0
=2,75·10-6
См/км, тоді загальна ємнісна провідність лінії:
b = b0
·l (4.3)
b = 2,75·10-6
·8,959 = 24,637·10-6
Cм.
Визначення ємнісних провідностей для інших ліній проводиться аналогічно. Результати розрахунку зведені в таблицю 4.1
Таблиця 4.1 – Параметри ліній електропередач
| ЛЕП
|
Uн, кВ
|
Rл, Ом
|
Хл, Ом
|
l, км
|
Rо, Ом/км
|
F, мм2
|
Во, См/км
|
В, См
|
| 40–26
|
330
|
3,4
|
14,2
|
42,900
|
0,079
|
2х240/32
|
3,38
|
145,0
|
| 26–100
|
330
|
5,1
|
11,9
|
35,952
|
0,142
|
2х240/32
|
3,38
|
121,5
|
| 26–22
|
330
|
51,0
|
20,7
|
62,538
|
0,816
|
2х240/32
|
3,38
|
211,4
|
| 22–1
|
330
|
3,4
|
25,1
|
76,524
|
0,044
|
2х300/39
|
3,41
|
260,9
|
| 26–1
|
330
|
1,1
|
4,7
|
14,199
|
0,077
|
2х240/32
|
3,38
|
48,0
|
| 1–50
|
330
|
2,7
|
21,4
|
66,254
|
0,041
|
2х400/51
|
3,46
|
229,2
|
| 50–10
|
330
|
6,1
|
31,8
|
96,073
|
0,063
|
2х240/32
|
3,38
|
324,725
|
| 30–97
|
110
|
1,6
|
3,7
|
8,959
|
0,179
|
185/29
|
2,75
|
24,637
|
| 97–98
|
110
|
4,4
|
7,7
|
18,333
|
0,240
|
150/24
|
2,70
|
49,5
|
| 97–37
|
110
|
7,5
|
18,6
|
45,036
|
0,167
|
185/29
|
2,75
|
123,8
|
| 37–99
|
110
|
1,3
|
1,9
|
4,450
|
0,292
|
120/19
|
2,66
|
11,8
|
| 25–98
|
110
|
6,8
|
11,5
|
26,932
|
0,252
|
120/19
|
2,66
|
71,6
|
| 25–2
|
110
|
3,2
|
6,1
|
14,286
|
0,224
|
120/19
|
2,66
|
38,0
|
| 99–2
|
110
|
9,9
|
21,8
|
51,905
|
0,191
|
150/24
|
2,70
|
140,1
|
| 2–62
|
110
|
0,1
|
0,6
|
1,813
|
0,055
|
240/32
|
3,38
|
6,1
|
| 2–63
|
110
|
2,9
|
6,8
|
16,465
|
0,176
|
185/29
|
2,75
|
45,3
|
| 63–62
|
110
|
5,4
|
13,9
|
33,656
|
0,160
|
185/29
|
2,75
|
92,6
|
| 63–64
|
110
|
3,5
|
7,8
|
18,886
|
0,185
|
185/29
|
2,75
|
51,9
|
| 49–64
|
110
|
8,8
|
12,6
|
29,508
|
0,298
|
120/19
|
2,66
|
78,5
|
| 49–69
|
110
|
19,1
|
26,2
|
60,369
|
0,316
|
95/16
|
2,61
|
157,6
|
| 69–71
|
110
|
8,6
|
10,2
|
23,502
|
0,366
|
95/16
|
2,61
|
61,3
|
| 11–71
|
110
|
0,8
|
1,6
|
3,810
|
0,210
|
150/24
|
2,66
|
10,1
|
Файл вхідних даних створюємо за допомогою редактора вхідних даних з використанням стандартного формату. У відповідності із даним форматом інформація про кожен вузол ЕС задається у рядку із кодом 0201. Для балансуючого вузла додається рядок з кодом 0202. Параметри кожної вітки схеми ЕС задаються у рядку із кодом 0301. Для віток, що містять трансформатори з РПН, які передбачається використовувати у оптимальному керуванні режимом ЕС додається рядок даних про параметри РПН із кодом 0302. В результаті було отримано файл вхідних даних для розрахунку та оптимізації режиму ЕС, поданий у додатку. На основі цього файлу автоматично був створений файл вхідних даних у внутрішньому форматі, що безпосередньо використовується у ПК для виконання розрахунків.
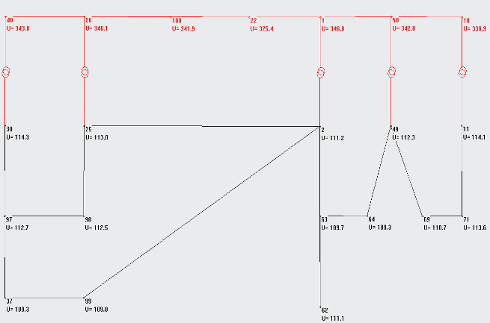
Рисунок 4.1 – Схема ЕЕС, створена за допомогою ПК АЧП
Формування мнемосхеми виконуємо за допомогою генератора схем на основі файлу вхідних даних у внутрішньому форматі. Спочатку перетворюємо RЕС-файл вхідних даних у файл графічного представлення типу DAT. Далі перетворюємо DAT – файл у файл внутрішнього формату типу GRP. Цей файл завантажуємо за допомогою кнопки «Схема», переходимо на рівень мнемосхеми і виконуємо остаточну корекцію зображення. Таким чином було отримано схему ЕС, подану на рисунку 4.1.
На основі створеного файлу вхідних даних було виконано розрахунок усталеного режиму ЕС результати якого подані у додатку, та оптимального режиму (додаток А). Результати розрахунку були нанесені на схему натисненням на кнопку «Оновити інформацію».
З результатів розрахунків видно, що дана ЕС характеризується невеликими втратами потужності ∆Р = 38,74 МВт порівняно із сумарною потужністю навантаження вузлів ЕС Рнав = 1926 МВт. Рівні напруги у вузлах ЕС з номінальною напругою 330 кВ знаходяться у припустимих межах, оскільки максимальне відхилення напруги в них не перевищує 5%. У вузлах 110 кВ відхилення напруги не перевищує 5%, тобто знаходиться у припустимих межах.
Використовуючи вбудований редактор схем підстанцій було отримано графічне представлення головної схеми трансформаторної підстанції 10–11 (рисунок 4.2), що є третім рівнем представлення диспетчерських схем. Трирівневе представлення схеми істотно спрощує її сприйняття оперативним персоналом та робить більш зручною роботу з нею.
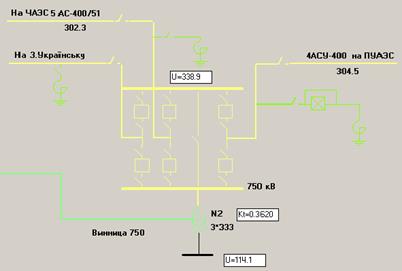
Рисунок 4.2 – Укрупнена головна схема підстанції у вузлі 10
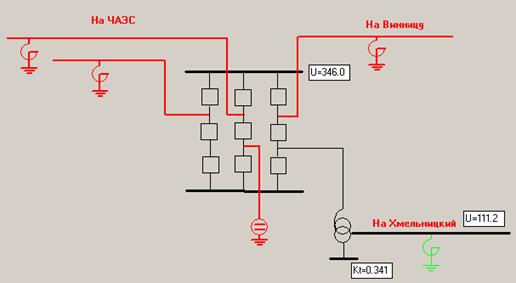
Рисунок 4.3 – Укрупнена головна схема підстанції у вузлі 1.
5. Розрахунок і вибір складу керувальних пристроїв
З метою визначення складу керуючих пристроїв, що забезпечує найбільшу ефективність керування виконується ранжування пристроїв за мірою впливу на втрати активної потужності в ЕС.
Ранжування керуючих пристроїв за допомогою АЧП виконується на основі залежностей втрат потужності від коефіцієнтів трансформації трансформаторів. Дані залежності визначаються при виконанні оптимізації усталеного режиму ЕС для кожного трансформатора, що помічений у файлі вхідних даних як регулюючий пристрій і відображаються у вікні програми оптимізації, та більш детально у вікні «Ранжування трансформаторів за пріоритетом управління». Дане вікно може бути відкрите лише за умови, якщо завантажено схему ЕС. Вказані залежності міри впливу регулюючих пристроїв для ЕС, що аналізується подані на рисунку 5.1.
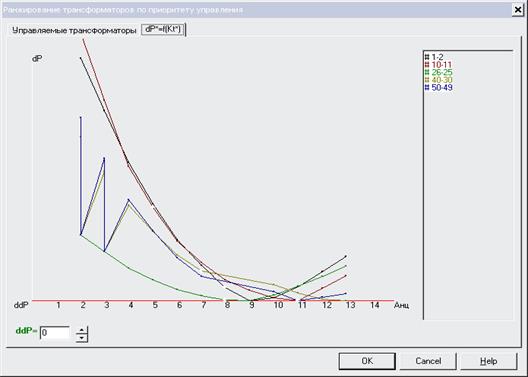
Рисунок 5.1 – Результати ранжування регулюючих пристроїв за допомогою ПК АЧП
Ранжування регулюючих пристроїв виконується у відповідності із нахилом їх характеристик, оскільки більший нахил відповідає більшій зміні втрат потужності в ЕС за одне перемикання РП.
Як видно з графіка залежності dP=f(Kt), що криві залежності ефективності перемикань трансформаторів в вітках 50–49 та 40–30 найбільш пологі тому пропоную РПН цих трансформаторів вивести зі складу регулювальних пристроїв.
Але графічний метод вибору оптимального складе регулювальних пристроїв не є абсолютно точним, особливо, враховуючи можливість отримання не досконалих залежностей зниження втрат від коефіцієнта трансформації для деяких РП. Тому для одержання однозначного рішення щодо оптимізації складу РП необхідно застосувати аналітичний метод. Він побудований на методі перебору варіантів і полягає у виконанні оптимізаційних розрахунків з почерговим вилученням певних РП. В якості критерію вибору оптимального складу трансформаторів приймається середня ефективність одного перемикання, тобто відношення сумарного зниження втрат до необхідної кількості перемикань РП. Враховуючи кількість трансформаторів з РПН (5) та вимогу щодо необхідності вилучення двох з них, формується 5 варіантів складу керувальних трансформаторів. Вказані варіанти та узагальнені показники для оцінки їх ефективності подано в таблиці 5.1. У першому рядку таблиці для порівняння наведено основні результати розрахунку оптимального режиму ЕС у разі залучення всіх РП. Більш детальні результати оптимізації режиму ЕС з різним складом регулювальних пристроїв подано в додатку В.
Таблиця 5.1 – Результати розрахунків з визначення оптимального складу регулювальних пристроїв ЕС
| Вилучений тр-р
|
Поточні втрати
|
Оптимальні втрати
|
Зниження втрат
|
Кількість перем
|
Середня ефективність
|
| 1–2
|
40,76
|
37,76
|
3,0
|
11
|
0,273
|
| 10–11
|
40,76
|
39,53
|
1,24
|
12
|
0,103
|
| 26–25
|
40,76
|
37,24
|
3,52
|
13
|
0,271
|
| 40–30
|
40,76
|
37,91
|
2,85
|
8
|
0,357
|
| 50–49
|
40,76
|
37,16
|
3,6
|
14
|
0,257
|
Як видно з результатів розрахунків оптимальний склад регулювальних пристроїв відповідає вилученню з регулювання трансформаторів 40–30 і 1–2.
Отже в якості оптимального складу РП приймається наступний: 10–11, 26–25, 50–49.
6. Визначення налагоджувальних параметрів САК потоками потужності в замкнених контурах ЕС
Важливим параметром САК ЕС є зона нечутливості, оскільки даний параметр узгоджує витрати на регулювання із зменшенням витрат на експлуатацію ЕС за рахунок зниження втрат потужності і від правильності його визначення залежить ефективність оптимального керування.
З метою визначення відповідного значення даного параметра було виконано ряд розрахунків оптимального режиму ЕС із різними значеннями зони нечутливості, яку змінювали в межах від 0 до14. Результати розрахунків подані у додатку. Основні результати подані у таблиці 6.1.
Таблиця 6.1 – Результати розрахунків по визначенню зони нечутливості
| Зона нечутливості
|
dPрек
, МВт
|
ddP, МВт
|
Кількість перемикань
|
Ефективність перемикань МВт/пер
|
| 0
|
38,3
|
2,5
|
7
|
0,356
|
| 1
|
38,3
|
2,4
|
4
|
0,606
|
| 3
|
38,7
|
2,1
|
3
|
0,607
|
| 6
|
39,9
|
0,9
|
1
|
0,879
|
| 9
|
Режим
|
близький
|
до
|
оптимального
|
В результаті визначено залежність середньої ефективності одного перемикання регулюючих пристроїв від величини зони нечутливості, графічне представлення якої подано на рисунку 6.1.
Зона нечутливості має бути встановлена таким чином, щоб забезпечити достатньо високий регулювальний ефект за рахунок меншої кількості регулювальних впливів. Отже, спираючись на таблицю 6.1 та рисунок 6.1 можна зробити висновок, що доцільно встановити зону нечутливості на рівні 1%, адже це призведе до значного зменшення втрат при меншій кількості перемикань РПН трансформаторів.
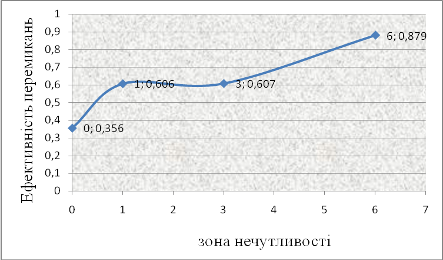
Рисунок 6.1 – Залежність середньої ефективності одного перемикання РП від зони нечутливості
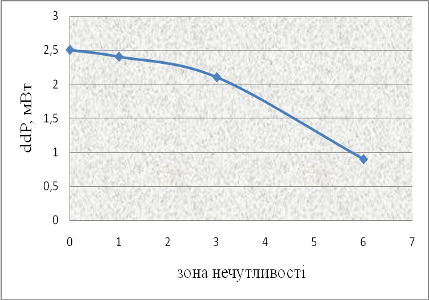
Рисунок 6.2 – Графік залежності зони нечутливості від зниження втрат
7. Оптимальне керування режимом ЕС в темпі процесу
Керування потоками потужності в ЕС виконується за допомогою трансформаторів з РПН. Інформація про стан системи, що включає параметри режиму та регулюючих пристроїв отримується з бази даних оперативного інформаційно-керуючого комплексу (ОІКК). На основі поточної інформації про режим ЕС за допомогою спеціальних програм визначаються оптимальні значення коефіцієнтів трансформації регулюючих пристроїв з урахуванням їх складу та зони нечутливості системи керування (дивись розділи 5 та 6). Реалізація даних параметрів забезпечує оптимальний потокорозподіл в ЕС і таким чином мінімальні втрати потужності в системі.
У програмному комплексі АЧП функціонування ОІКК відтворюється за допомогою імітатора ОІКК, який запускається з меню «Модель ОІКК». Перед запуском імітатора необхідно налаштувати систему керування. Для цього у файлі вхідних даних видаляємо властивість РП з рядків з кодом 0302 для віток з трансформаторами 1–2 та 40–30. У вікні ранжування трансформаторів за пріоритетом керування встановлюємо зону нечутливості САК 1%
Після активізації імітатора ОІКК із заданим інтервалом часу, в нашому випадку це 20 с, починають надходити дані про параметри режиму ЕС (навантаження, рівні напруг і т.д.). Зміни параметрів режиму автоматично відображаються на мнемосхемі ЕС. Графік зміни сумарного активного навантаження в часі Рсум=f(t) подано на рисунку 7.1.
Контроль втрат потужності у системі виконується за графіком ∆Р = f(t), який показано на рисунку 7.2. На даному графіку відображаються поточні значення втрат потужності в ЕС, а також значення втрат потужності у оптимальному та рекомендованому режимах ЕС.
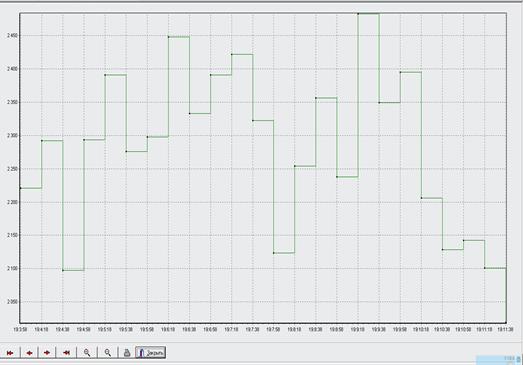
Рисунок 7.1 – Графік зміни сумарного активного навантаження ЕЕС у часі
Якщо значення втрат потужності у поточному режимі ЕС виходить за межі втрат у рекомендованому режимі, то необхідно визначити та впровадити керуючі впливи за допомогою РП, з метою зменшення ∆Р. Визначення оптимальних значень коефіцієнтів трансформації здійснюємо за допомогою ПК АЧП.
Команду на впровадження визначених оптимальних значень віддаємо у вікні «Ранжування трансформаторів за пріоритетом керування» шляхом подвійного натиснення на рекомендовані значення відпайок трансформаторів.
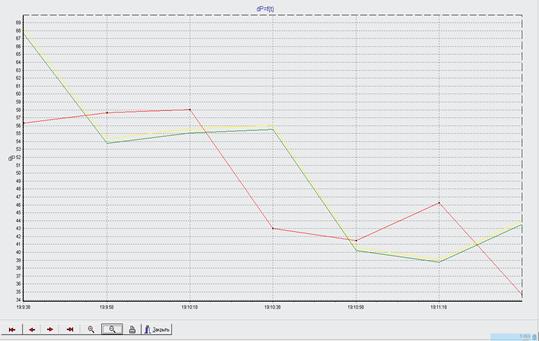
Рисунок 7.2 – Графік зміни втрат активної потужності ЕС у часі
Як видно з рисунку 7.2 введення оптимальних керуючих впливів за рахунок корекції потокорозподілу в ЕС зменшує втрати активної потужності та вводить їх у межі рекомендованого режиму ЕС. Але впровадження керуючих впливів не завжди ефективно знижує значення втрат потужності у ЕС. Це зумовлено швидкою зміною режиму навантаження ЕС (дивись рисунок 7.1) та несвоєчасністю впровадження дій з керування режимом.
Засоби поточного контролю параметрів поточного режиму у часі є необхідною умовою ефективного керування режимом ЕС. Контроль зміни напруги та навантаження вузлів ЕС, а також потоків потужності у вітках виконується засобами вікна аналізу даних. Приклад графіку зміни напруги для вузла 99 (вузла з мінімальною напругою) подано на рисунку 7.4, з якого видно, що оптимальне керування ЕС при зміні навантаження у даному вузлі (дивись рисунок 7.5) дозволило не тільки зменшити втрати активної потужності в ЕС але й покращити режим напруги в ЕС.
8.
Техніко-економічний ефект оптимального керування
В разі впровадження електроощадних заходів у ЕЕС економічний ефект досягається за рахунок того, що збільшується прибуток від експлуатації об’єкта.
В процесі роботи оптимізаційної програми комплексу АЧП я отримав наступні техніко-економічні показники оптимального режиму:
Потеpи P: в исходном pежиме:=40.76 МВт; в оптимальном pежиме:=38.27 МВт.
В pезультате pеализации оптимального pежима достигается снижение потеpь на 2.49 МВт или на 6.12%
Для pеализации оптимального pежима тpебуется всего пеpеключений отпаек тpансфоpматоpов – 7
В сpеднем эффективность одного пеpеключения составляет – 0.356 МВт/пеpекл.
Збільшення прибутку має місце за рахунок зменшення обсягу закупівлі електроенергії у ЕС або на енергоринку за тієї умови, що реалізація залишається на попередньому рівні.
Недосконалість керування оцінюється зменшенням прибутку від несвоєчасності та неефективності керувальних впливів. Виходячи з цього економічний ефект можна обчислити по вхідному тарифу:
де ΔW` – втрати електроенергії протягом звітного періоду без впровадження електроощадних заходів (червона крива на графіку рис. 8.1);
ΔW`` – втрати електроенергії в рекомендованому режимі
ΔП – зменшення прибутку за рахунок неякісного керування.
Якщо ΔП < 0, то потрібно повторити розрахунок,
ΔП = 0 – здійснено ідеальне керування.
Втрати в поточному режимі визначають методом чисельного інтегрування:
Для остаточної оцінки ефективності використовується відносний показник, що характеризує зменшення П по відношенню до вартості корисно відпущеної споживачам електроенергії:
Отже,
| Час
|
ΔРП,
МВт
|
ΔРР,
МВт
|
| 19:8:38
|
75
|
59
|
| 19:8:58
|
57,7
|
73
|
| 19:9:18
|
70
|
55
|
| 19:9:38
|
58
|
66
|
| 19:9:58
|
57
|
53
|
| 19:10:18
|
58
|
55
|
| 19:10:38
|
43
|
56
|
| 19:10:58
|
42
|
40
|
| 19:11:18
|
46
|
39
|
| 19:11:38
|
34,8
|
43
|
| å
|
541,5
|
539
|
Визначимо втрати електроенергії протягом звітного періоду без впровадження електроощадних заходів, та втрати електроенергії в оптимальному режимі:

Обчислимо економічний ефект по вхідному тарифу:

Визначимо надлишкові втрати, що зумовлені ефективністю керування ЕС:

 , ,
Якщо  0,11 тис. грн. МВт/год. 0,11 тис. грн. МВт/год.

Відносний показник, що характеризує зменшення П по відношенню до вартості корисної спожитої електроенергії:

Тобто, неякісне керування зменшує прибуток на 0,463%, тобто на 206,25 грн.
Отже, здійснення керуючих впливів є важливою реакцією при збільшенні втрат, оскільки при нехтуванні цією процедурою прибуток зменшуватиметься на 206,25 грн. грн. А оскільки керування в основному здійснюється диспетчером, то його ефективність значно залежить від кваліфікації диспетчера, вміння сприймати зміни в режимі та приймати швидкі і правильні рішення.
Висновки
У цій курсовій роботі я вибрав технічну і функціональну структуру АСУ. Забезпечення необхідного рівня надійності функціонування АСУ було здійснено за рахунок використання двошинного комплексу і резервованої схеми його підключення, а також сформував комплекс функціональних задач, які реалізуються в проектованій АСУ.
Виконав ранжування даної ЕС і обрав оптимальний склад РП. З 5 трансформаторів з РПН вибрано 3 найбільш ефективних. Дія оптимального складу РП визначила налагоджувальні параметри САК. Так для введення режиму ЕС в оптимальну область необхідно виконати 7 перемикання РПН трансформаторів.
Оптимальні значення налагоджувальних параметрів досліджено в часі на моделі ОІКК. Отримані значення залишаються оптимальними в широкому діапазоні зміни навантажень вузлів.
Було досліджено графік зміни втрат активної потужності ЕС, напруги у найбільш віддаленому вузлі, активної та реактивної потужностей у цьому вузлі, а також активної та реактивної потужностей у лінії з найбільшими втратами як функції від часу.
Література
1.Баркан Я.Д., Орехов Л.А. Автоматизация энергосистем. – М. Высш. школа, 1981. – 271 с.
2.Веников В.Д, Журавлев В.Г., Филипова Т.А. Оптимизация режимов электростанций и знергосистем: Учебник для ВУЗов. 2-е изд., перераб. и доп. – М: Знергоатомиздат, 1990. – 352 с.
3.Оптимизация режимов злектростанций и знергосистем: Учеб. Для ВУЗов // Веников В.Д, Журавлев В.Г., Филипова Т.А. – 2-е изд., перераб. и доп. – М: Знергоатомиздат, 1990. – 352 с.
4.Орнов В.Г., Рабинович М.А. Задачи оперативного и автоматического управлення знергосистемами. – М.: Энергоатомиздат, 1988. – 223 с.
5.Справочник по проектированию электрических систем / под ред. С.С. Рокотяна и Н.М. Шапира. – М.: Энергоатомиздат, 1985 г.
6.Фурман І. О., Краснобаєв В.А., Рожков П.П. Автоматизовані системи керування технологічними процесами. – Харків: Факт, 2006. – 317 с.
7.Егоров В.Е., Бандурин И.И., Баласс К.А. Создание информационно-защищонной АСУ ТП для повышения эфективности и надежности управления электроснабжением городов и районов. – Академия энергетики, 2009. – 221 с.
8.http://www.fskees.ru
9.http://www.votum.if.ua/uk/publications/scada.htm
|
